Embed Size (px)
Citation preview
Nov 28th 2016 – MSL Workshop 2016
The Fawkes Robot Software FrameworkSoftware Stack for the RoboCup Logistics League
Matthias LöbachTim Niemueller
Carologistics
RoboCup participant since 2012Joint team of FH Aachen University of Applied Sciences &RWTH Aachen UniversityWinner of the RoboCup Logistics League2014, 2015 and 2016
1 / 30
1 RoboCup Logistics League
2 Fawkes Robot Software Framework
3 Software Components
4 Conclusion
2 / 30

RoboCup Logistics League - At a Glance
RoboCup Logistics League (RCLL)
In-factory manufacturing logisticsin Smart FactoryMaintain and optimize materialflow in productionMulti-Robot planning/schedulingand coordination
Goals
Production logistics autonomyBenchmarking of robots in aSmart FactoryLong-term autonomy withreasoning/planning systems
3 / 30
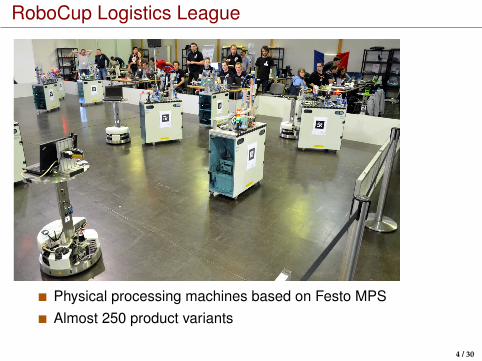
RoboCup Logistics League
Physical processing machines based on Festo MPSAlmost 250 product variants
4 / 30
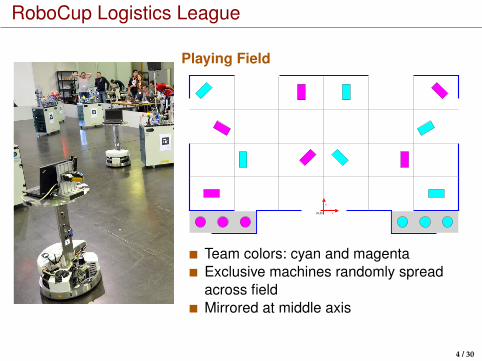
RoboCup Logistics League
Playing Field
Team colors: cyan and magentaExclusive machines randomly spreadacross fieldMirrored at middle axis
4 / 30
RoboCup Logistics League - Game Phases
Setup Phase
Duration: 5 minutesTeams prepare robots in insertion zone
Exploration Phase
Duration: 4 minutesPoints for correct light signal reportsPoints for correct machine position
Production Phase
Duration: 15 minutesPoints for delivered productsPoints for intermediate steps
5 / 30

RoboCup Logistics League - Production Machines
Mobile production machines
Conveyor as contact point forrobotsAR-Tag for identification andlocalizationSignal light for identification andstatus
6 / 30
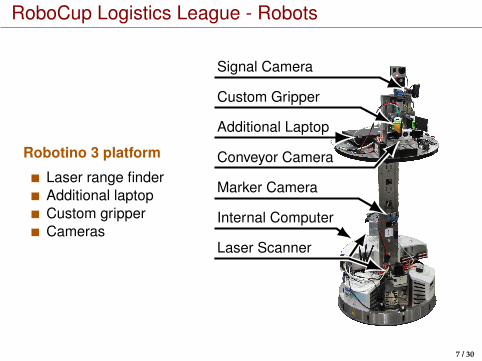
RoboCup Logistics League - Robots
Robotino 3 platform
Laser range finderAdditional laptopCustom gripperCameras
Signal Camera
Custom Gripper
Additional Laptop
Conveyor Camera
Marker Camera
Internal Computer
Laser Scanner
7 / 30
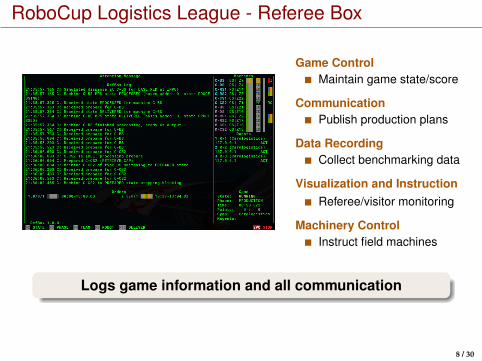
RoboCup Logistics League - Referee Box
Game ControlMaintain game state/score
CommunicationPublish production plans
Data RecordingCollect benchmarking data
Visualization and InstructionReferee/visitor monitoring
Machinery ControlInstruct field machines
Logs game information and all communication
8 / 30
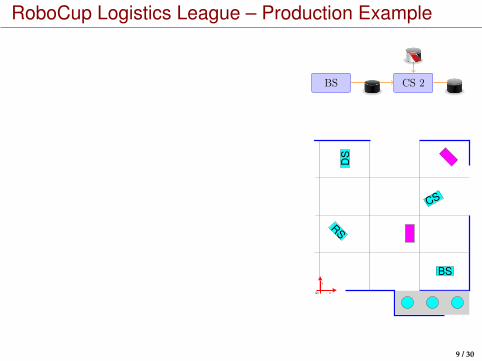
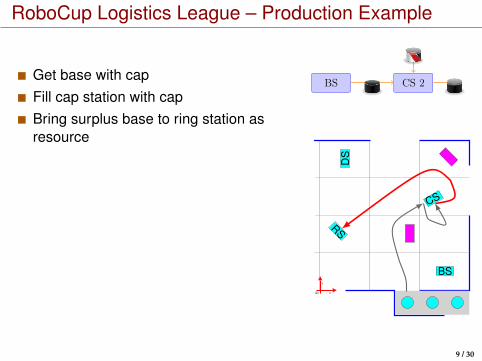
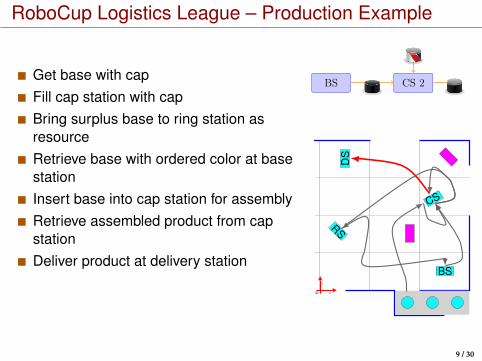
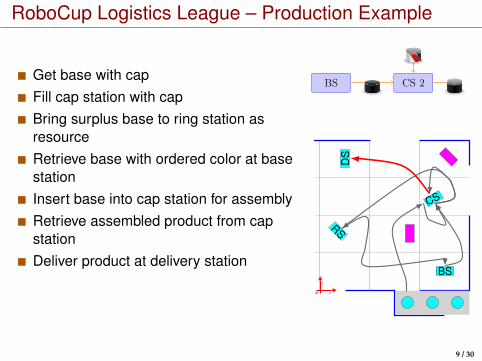
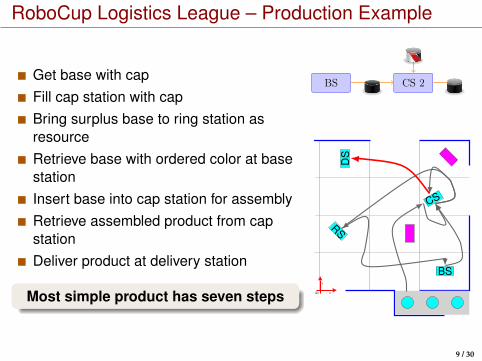
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
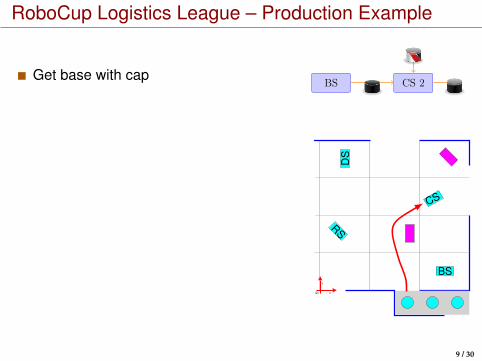
RoboCup Logistics League – Production Example
Get base with cap
Fill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
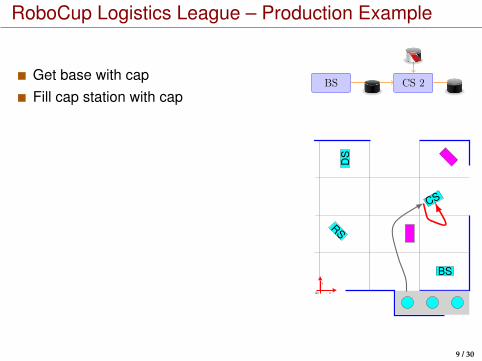
RoboCup Logistics League – Production Example
Get base with capFill cap station with cap
Bring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresource
Retrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
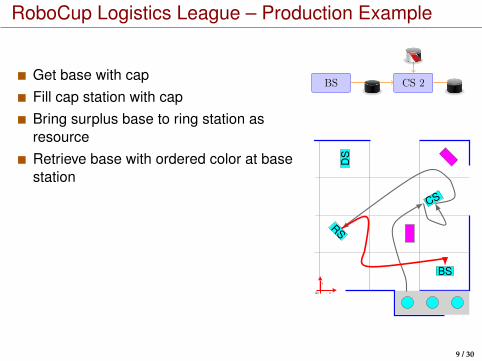
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestation
Insert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
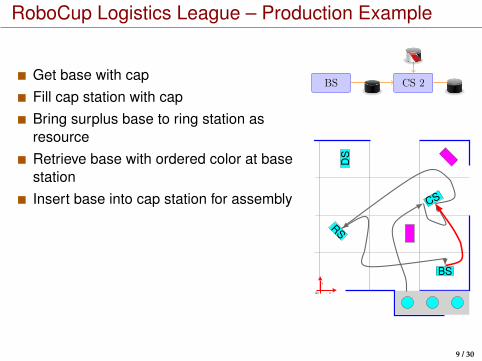
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assembly
Retrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
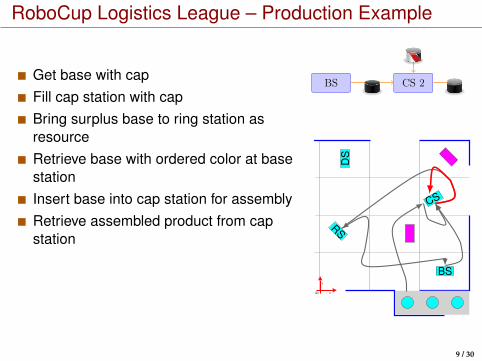
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstation
Deliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
RoboCup Logistics League – Production Example
Get base with capFill cap station with capBring surplus base to ring station asresourceRetrieve base with ordered color at basestationInsert base into cap station for assemblyRetrieve assembled product from capstationDeliver product at delivery station
Most simple product has seven steps
BS CS 2
CS
RS
BS
DS
9 / 30
1 RoboCup Logistics League
2 Fawkes Robot Software Framework
3 Software Components
4 Conclusion
10 / 30
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
G
W
C������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
11 / 30
Integration
Middleware
Interconnect software componentsMake data accessible and observableStructure the data
Framework
Run-time organization and execution flowAssert certain properties of the system
Toolbox
Provide libraries for typical robotics taskIntegrate libraries and make available through framework
12 / 30
Integration
Middleware
Interconnect software componentsMake data accessible and observableStructure the data
Framework
Run-time organization and execution flowAssert certain properties of the system
Toolbox
Provide libraries for typical robotics taskIntegrate libraries and make available through framework
12 / 30
Integration
Middleware
Interconnect software componentsMake data accessible and observableStructure the data
Framework
Run-time organization and execution flowAssert certain properties of the system
Toolbox
Provide libraries for typical robotics taskIntegrate libraries and make available through framework
12 / 30
Fawkes at a Glance
Component-based architecture (plugins)Hybrid BlackBoard/messaging data exchangeMulti-threaded and distributableAspect-oriented framework feature accessStructured and synchronized main loopAutomated coordinate transform systemWeb interface for introspection and control
13 / 30
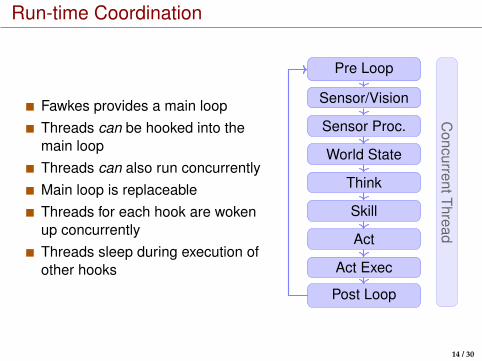
Run-time Coordination
Fawkes provides a main loopThreads can be hooked into themain loopThreads can also run concurrentlyMain loop is replaceableThreads for each hook are wokenup concurrentlyThreads sleep during execution ofother hooks
Pre Loop
Sensor/Vision
Sensor Proc.
World State
Think
Skill
Act
Act Exec
Post Loop
ConcurrentThread
14 / 30

Run-time Coordination
Fawkes provides a main loopThreads can be hooked into themain loopThreads can also run concurrentlyMain loop is replaceableThreads for each hook are wokenup concurrentlyThreads sleep during execution ofother hooks
Pre Loop
Sensor/Vision
Sensor Proc.
World State
Think
Skill
Act
Act Exec
Post Loop
ConcurrentThread
14 / 30
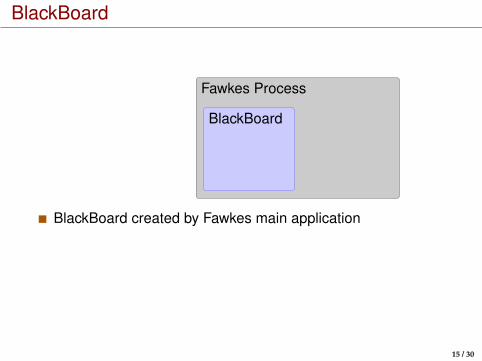
BlackBoard
Fawkes Process
BlackBoard
Interface A
Interface B
Thread 1
Thread 2
Remote App
BlackBoard created by Fawkes main application
15 / 30
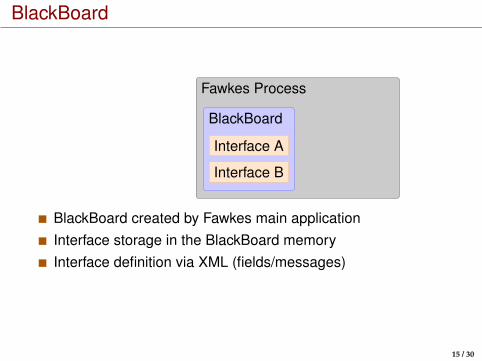
BlackBoard
Fawkes Process
BlackBoard
Interface A
Interface B
Thread 1
Thread 2
Remote App
BlackBoard created by Fawkes main applicationInterface storage in the BlackBoard memoryInterface definition via XML (fields/messages)
15 / 30
BlackBoard
Fawkes Process
BlackBoard
Interface A
Interface B
Thread 1
Thread 2
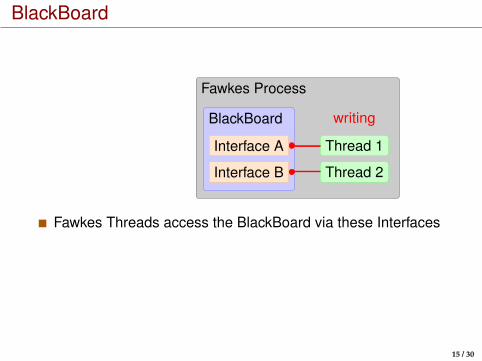
writing
Remote App
Fawkes Threads access the BlackBoard via these Interfaces
15 / 30
BlackBoard
Fawkes Process
BlackBoard
Interface A
Interface B
Thread 1
Thread 2
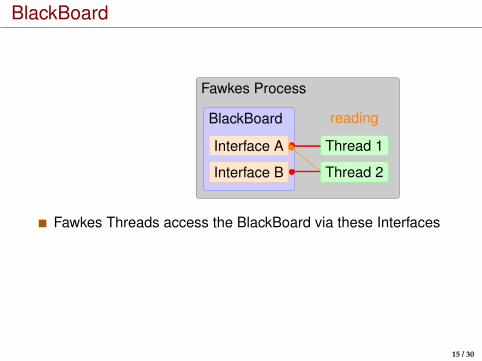
reading
Remote App
Fawkes Threads access the BlackBoard via these Interfaces
15 / 30
BlackBoard
Fawkes Process
BlackBoard
Interface A
Interface B
Thread 1
Thread 2
Remote App
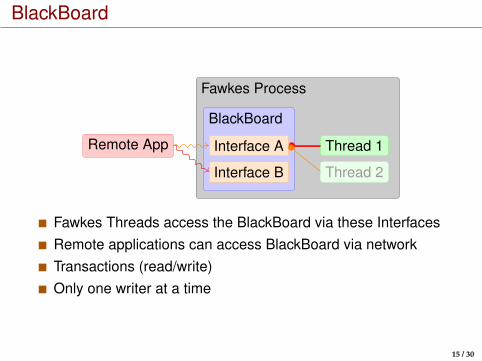
Fawkes Threads access the BlackBoard via these InterfacesRemote applications can access BlackBoard via networkTransactions (read/write)Only one writer at a time
15 / 30
BlackBoard
Fawkes Process
BlackBoard
Interface A
Interface B
Thread 1
Thread 2
Remote App
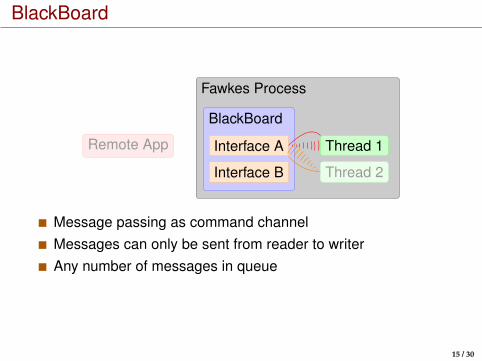
Message passing as command channelMessages can only be sent from reader to writerAny number of messages in queue
15 / 30
Plugins
ComponentsProvides specific functionalityIdeally: parameterizable blackboxCan – ideally – be easily replacedInterconnected through middleware
PluginsDynamically loadable librariesSet of threads and their initializationFramework can introspect threads
Soft Guarantee for Plugins⇒ Either all threads are successfully
initialized, or none is ever started
Plugin
Thread 1
Thread 2
· · ·
16 / 30
Plugins
ComponentsProvides specific functionalityIdeally: parameterizable blackboxCan – ideally – be easily replacedInterconnected through middleware
PluginsDynamically loadable librariesSet of threads and their initializationFramework can introspect threads
Soft Guarantee for Plugins⇒ Either all threads are successfully
initialized, or none is ever started
Plugin
Thread 1
Thread 2
· · ·
16 / 30
Plugins
ComponentsProvides specific functionalityIdeally: parameterizable blackboxCan – ideally – be easily replacedInterconnected through middleware
PluginsDynamically loadable librariesSet of threads and their initializationFramework can introspect threads
Soft Guarantee for Plugins⇒ Either all threads are successfully
initialized, or none is ever started
RobotinoPlugin
ComThread
SensorThread
ActThread
16 / 30
Plugins
ComponentsProvides specific functionalityIdeally: parameterizable blackboxCan – ideally – be easily replacedInterconnected through middleware
PluginsDynamically loadable librariesSet of threads and their initializationFramework can introspect threads
Soft Guarantee for Plugins⇒ Either all threads are successfully
initialized, or none is ever started
LaserFilterPlugin
FilterThread 1
FilterThread 2
FilterThread 3
· · ·(dynamically allocatedbased on config)
16 / 30
Aspects
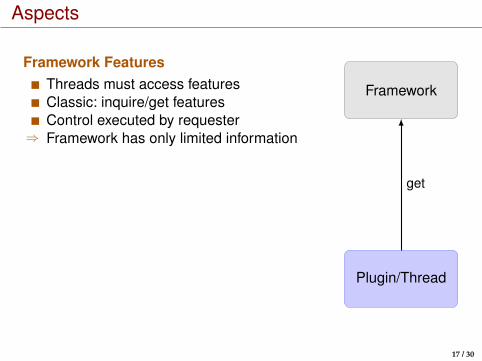
Framework FeaturesThreads must access featuresClassic: inquire/get featuresControl executed by requester
⇒ Framework has only limited information
AspectsPlugin threads denote requirementsFramework initializes aspectsSoft guarantee of feature availability
ImplementationAspect as simple classThreads inherit aspect classFramework asserts initialization
Framework
Plugin/Thread
get
17 / 30
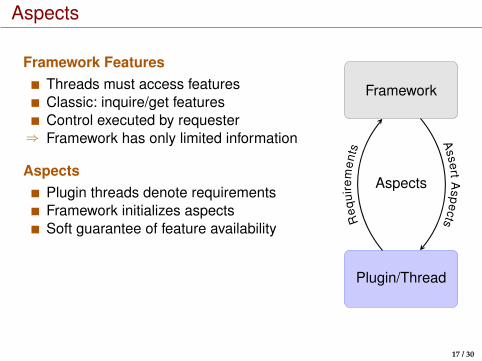
Aspects
Framework FeaturesThreads must access featuresClassic: inquire/get featuresControl executed by requester
⇒ Framework has only limited information
AspectsPlugin threads denote requirementsFramework initializes aspectsSoft guarantee of feature availability
ImplementationAspect as simple classThreads inherit aspect classFramework asserts initialization
Framework
Plugin/Thread
Aspects
Req
uire
men
ts
Assert A
spects
17 / 30

Aspects
Framework FeaturesThreads must access featuresClassic: inquire/get featuresControl executed by requester
⇒ Framework has only limited information
AspectsPlugin threads denote requirementsFramework initializes aspectsSoft guarantee of feature availability
ImplementationAspect as simple classThreads inherit aspect classFramework asserts initialization
LaserLinesThread
ClockAspect
LoggingAspect
BlackBoardAspect
TransformAspect
PointCloudAspect
· · ·
17 / 30
Transforms
18 / 30
Transforms
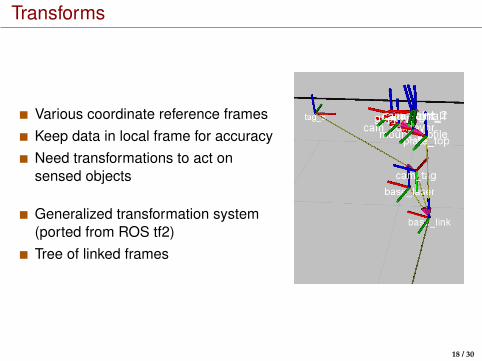
Various coordinate reference framesKeep data in local frame for accuracyNeed transformations to act onsensed objects
Generalized transformation system(ported from ROS tf2)Tree of linked frames
18 / 30
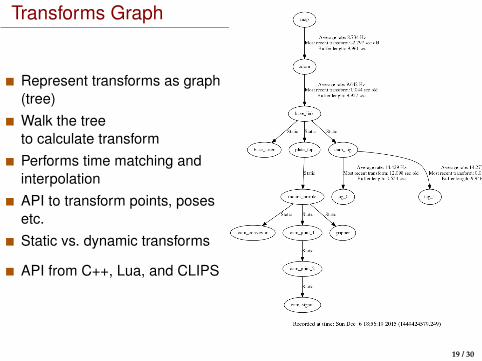
Transforms Graph
Represent transforms as graph(tree)Walk the treeto calculate transformPerforms time matching andinterpolationAPI to transform points, posesetc.Static vs. dynamic transforms
API from C++, Lua, and CLIPS
19 / 30
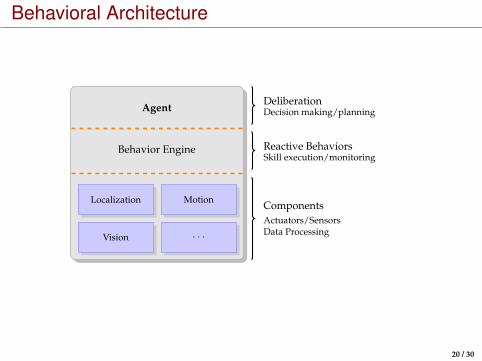
Behavioral Architecture
Agent
Behavior Engine
Vision · · ·
Localization Motion ComponentsActuators/SensorsData Processing
Reactive BehaviorsSkill execution/monitoring
DeliberationDecision making/planning
20 / 30
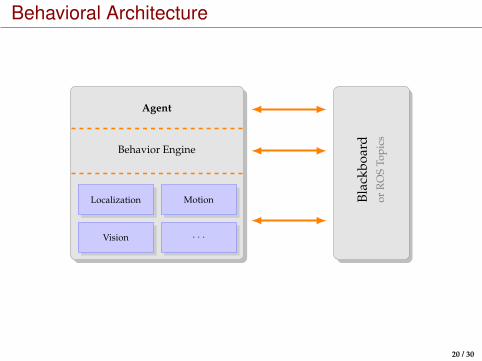
Behavioral Architecture
Agent
Behavior Engine
Vision · · ·
Localization Motion Blac
kboa
rdor
RO
STo
pics
20 / 30
Webview
21 / 30
Webview
21 / 30
Webview
21 / 30
Webview
21 / 30
Webview
21 / 30
Webview
21 / 30
Further Features
Text and data logging facilitiesConfiguration sub-systemNetwork messaging infrastructure and discoveryROS integrationPlugins for performance analysis (RRD, mongodb-log, ...)
⇒ Batteries included
22 / 30
1 RoboCup Logistics League
2 Fawkes Robot Software Framework
3 Software Components
4 Conclusion
23 / 30
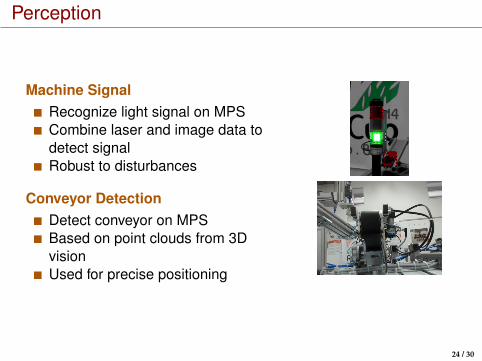
Perception
Machine SignalRecognize light signal on MPSCombine laser and image data todetect signalRobust to disturbances
Conveyor DetectionDetect conveyor on MPSBased on point clouds from 3DvisionUsed for precise positioning
24 / 30
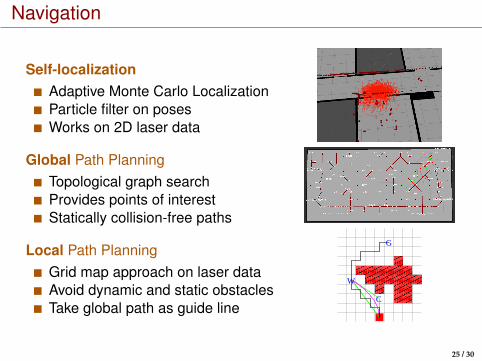
Navigation
Self-localizationAdaptive Monte Carlo LocalizationParticle filter on posesWorks on 2D laser data
Global Path PlanningTopological graph searchProvides points of interestStatically collision-free paths
Local Path PlanningGrid map approach on laser dataAvoid dynamic and static obstaclesTake global path as guide line
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
�������������������������������������������������������
�������������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
��������������������������������������������������
G
W
C������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
25 / 30
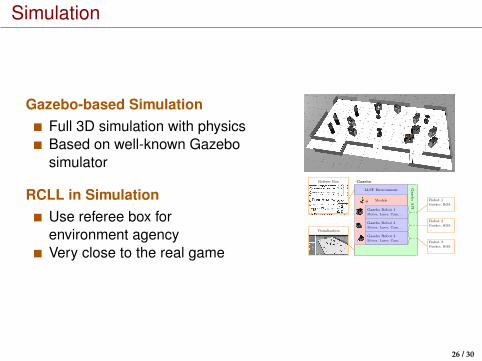
Simulation
Gazebo-based SimulationFull 3D simulation with physicsBased on well-known Gazebosimulator
RCLL in SimulationUse referee box forenvironment agencyVery close to the real game
Gazebo
LLSF Environment
Models
Gazebo Robot 1Motor, Laser, Cam, ...
Gazebo Robot 2Motor, Laser, Cam, ...
Gazebo Robot 3Motor, Laser, Cam, ...
Gazeb
oAPI
Referee Box
Visualization
Robot 2Fawkes, ROS,
...
Robot 1Fawkes, ROS,
...
Robot 3Fawkes, ROS,
...
26 / 30
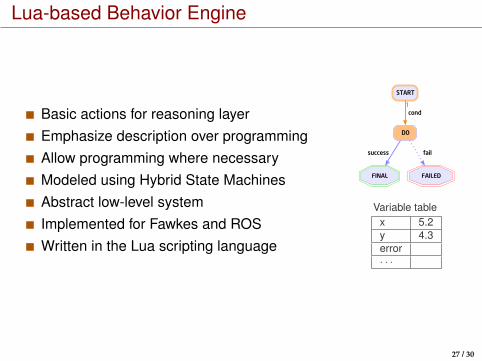
Lua-based Behavior Engine
Basic actions for reasoning layerEmphasize description over programmingAllow programming where necessaryModeled using Hybrid State MachinesAbstract low-level systemImplemented for Fawkes and ROSWritten in the Lua scripting language
Variable tablex 5.2y 4.3error· · ·
27 / 30
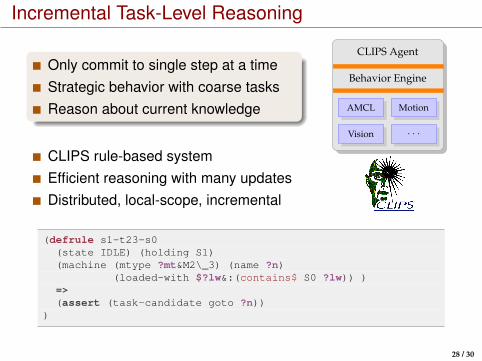
Incremental Task-Level Reasoning
Only commit to single step at a timeStrategic behavior with coarse tasksReason about current knowledge
CLIPS rule-based systemEfficient reasoning with many updatesDistributed, local-scope, incremental
Vision · · ·
AMCL Motion
Behavior Engine
CLIPS Agent
(defrule s1-t23-s0(state IDLE) (holding S1)(machine (mtype ?mt&M2\_3) (name ?n)
(loaded-with $?lw&:(contains$ S0 ?lw)) )=>(assert (task-candidate goto ?n))
)
28 / 30
1 RoboCup Logistics League
2 Fawkes Robot Software Framework
3 Software Components
4 Conclusion
29 / 30
Conclusion and Questions
Fawkes as a versatile software framework is the foundationfor the the publicly released Carologistics software stack.
Hybrid blackboard middlewareMassively multi-threaded software componentsVersatile Behavior Engine and reasoning agentFocus on integration with reasoning componentsRCLL software stack released as open source software
https://www.fawkesrobotics.org/https://www.carologistics.org/
30 / 30