Embed Size (px)
Citation preview
The End-to-End System Simulator of GOCEG. Catastini(1), S. Cesare(1), M. Dumontel(1), M. Parisch(1), G. Sechi(1), R. Floberghagen(2)
(1) Thales Alenia Space Italia, (2) ESA/ESRIN
The main payload of the GOCE satellite is the Gradiometer, an instrument constituted by six ultra-sensitive accelerometers for measuring the Earth gravity gradients along three orthogonal directions. The ultimate performance of the accelerometers was not testable on ground due to the laboratory background noise limitations. Moreover, the in-flight performance of the gradiometer is strictly related to drag compensation function provided by the spacecraft, also not testable on ground.
The End-to-End (E2E) System Simulator of GOCE is the tool utilized for producing the most reliable prediction of the GOCE in-flight performances.
Simulator applications along the GOCE project life cycle:
� Gradiometry performance assessment and error budget computation.
� Simulation of the accelerometerbehaviour under different flight conditions (drag-free, non-drag-free, proof mass initial acquisition, calibration,..).
� Validation of the requirement apportionment to the error contributors.
� Validation of the drag-free and attitude control design.
� Design and validation of the Gradiometer in-flight calibration methods.
� Design and validation of the Level 0 to Level 1b ground processing methods and algorithms.
� Assessment of Gradiometer and spacecraft failures impact on the gradiometry performance.
� Generation of Level 1b data series for feeding the Level 2 processing.
� Simulation of the spacecraft dynamics for hardware-in-the-loop tests.
MTR
IPA
GCA
MTRMTR
IPAIPA
GCAGCA
MGM
CESS
DSS
STR
SSTI
EGG
MGMMGM
CESSCESS
DSSDSS
STRSTR
SSTISSTI
EGGEGG
Sensor pre-proc.
Actuator post-proc.
DFAC ALGOS
DYN
ENVOSW
Sensor pre-proc.
Actuator post-proc.
DFAC ALGOS
Sensor pre-proc.
Actuator post-proc.
DFAC ALGOS
DYN
ENVOSW
DYNDYN
ENVENVOSWOSW
GPS constell.
files
GPS constell.
files
STR telemetry
files
STR telemetry
files SSTI telemetry
files
SSTI telemetry
files EGG telemetry
file
EGG telemetry
file Science data processing & calibration
Level 1b products:
gravity gradients,
precise orbit
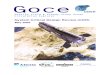
DYN: Dynamics
OSW: Outside World (gravity field, magnetic field etc.)
ENV: Environmental perturbations
MGM: Magnetometer
CESS: Coarse Earth Sun Sensor
DSS: Digital Sun Sensor
STR: Star Tracker
SSTI: Satellite To Satellite tracking
EGG: Electrostatic Gradiometer
MTR: Magneto Torquer
IPA: Ion Propulsion Assembly
GCA: Gradio Calibration Assembly
Gravity
field, gradient
Gravity
field, gradient
Simulator function Simulator architectureThe E2E simulator has been set up since the early stages (Phase A) of the GOCE programme and continuously updated according to the projectevolution, including the characteristic of the payload and spacecraft equipment, derived from tests (when possible) or detailed analyses.
E2E System Simulator main building blocks:
� Outside World � models of gravity field (EGM96 up to degree and order 360), atmosphere (MSIS90, HWM93), B field (Ørsted 2002).
� Environmental Perturbations � computation of the forces and torques on the spacecraft through interaction models with the Outside Word.
� Dynamics � computation of the orbital and attitude motion of the spacecraft (and of the proof masses of the accelerometers) under the environmental forces and torques and the control forces and torques.
� Gradiometer � High-fidelity dynamic model of the six accelerometers; and geometric arrangement of the accelerometers on the Gradiometer.
� GPS � High-fidelity model of the GPS receiver (SSTI); orbit propagator of the full GPS satellite constellation.
� Drag-Free and Attitude Control System (DFACS) � models of the sensors (Star Tracker, Coarse Earth-Sun Sensor, Digital Sun Sensor, Magnetometer) and actuators (Ion Thrusters, Magnetic Torquers, Gradiometer Calibration Device) involved in the satellite drag, orbit and attitude control; estimation and control algorithms (same as on-board).
� Post-processing Module � elaboration of the raw (Level 0) measurements and production of the Level 1b products (gravity gradients, orbit), including the Gradiometer calibration parameters.
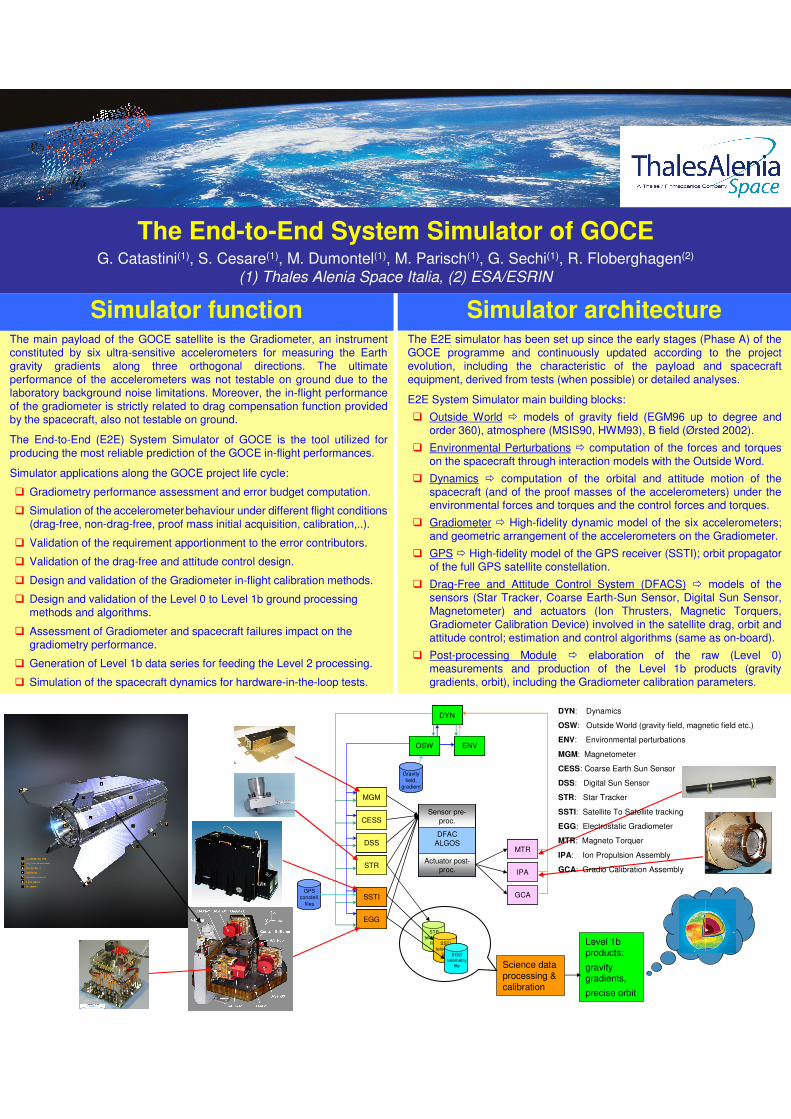
The accelerometer model generates the DFACS inputs and the raw science measurements (proof-mass control voltages). Each proof mass is subject to the Earth gravity (at its location on the satellite), to the forces exchanged with the spacecraft and to the action of the accelerometer control loop. All known instrument noise sources, as well as all measurement errors due to instrument-to-satellite coupling are implemented in the model.
Accelerometer high-fidelity model GPS receiver high-fidelity modelThe GPS receiver model provides the spacecraft orbital position and velocity which are used on board for the attitude reconstruction in a local horizontal/local vertical reference frame, and generates simulated raw telemetry data such as are used in the ground processing for precise orbit determination. The antenna phase centre variation with elevation/azimuth and the receiver inter-channel/inter-frequency bias behaviour are modelled.
Simulator outputs compared to flight data
Simulator technical data summary� Language: C, Fortran, Simulink with RTW exported C code, Matlab
� Platform: Dual Xeon Dual Core 3.2 GHz, 8 GB RAM, RHEL 5.5 2.6.18
� Supported OS: GNU/Linux, Unix, Windows/Cygwin, Mac OS X
� Minimum HW requirements for E2E installation: 10 GB HD, 4 GB RAM
� Output data volume for 60 days of science mission simulation: 6 GB
EGG & STR raw telemetry (binary files); 14 GB SSTI telemetry; 2 GB
ancillary data (binary files); 45 GB post-processing data (binary files)
� Speed with respect to real time: 6.5x (on the Simulator Platform)
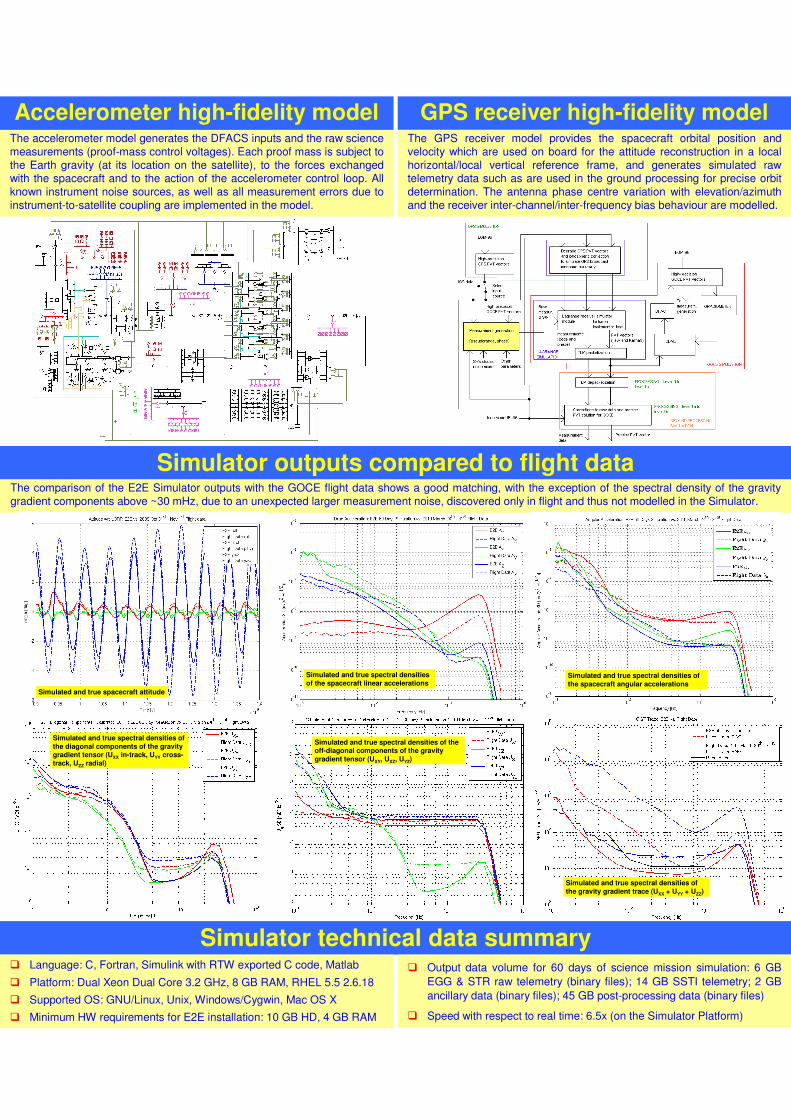
The comparison of the E2E Simulator outputs with the GOCE flight data shows a good matching, with the exception of the spectral density of the gravity gradient components above ~30 mHz, due to an unexpected larger measurement noise, discovered only in flight and thus not modelled in the Simulator.
Simulated and true spacecraft attitude
Simulated and true spectral densities
of the spacecraft linear accelerationsSimulated and true spectral densities of
the spacecraft angular accelerations
Simulated and true spectral densities of
the diagonal components of the gravity gradient tensor (UXX in-track, UYY cross-
track, UZZ radial)
Simulated and true spectral densities of the off-diagonal components of the gravity
gradient tensor (UXY, UXZ, UYZ)
Simulated and true spectral densities of
the gravity gradient trace (UXX + UYY + UZZ)