Embed Size (px)
Citation preview
The DLR On-Orbit Servicing Testbed
J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer
Robotics and Mechatronics Center, DLR
VR-OOS Workshop 2012DLR, Oberpfaffenhofen
Folie 2
Talk outline
The DEOS Project
The DEOS Simulator goals and requirements
The DEOS Simulator concept
Conclusion
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello

Folie 3
DEOS Deutsche Orbitale Servicing Mission
Goals:
• develop and verify robotic technology for the capture a tumbling non-
cooperative Client satellite with a Servicer spacecraft and
• to de-orbit the coupled configuration in a pre-defined corridor at end of
mission
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 4
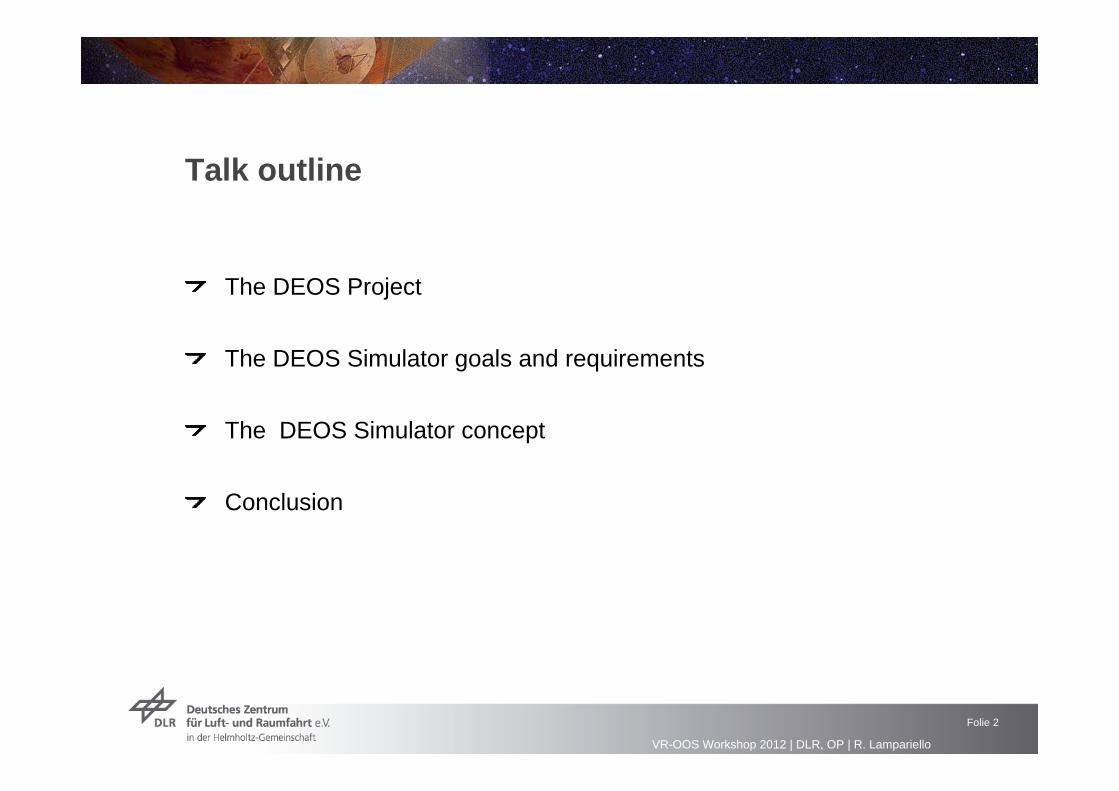
DEOS Deutsche Orbitale Servicing Mission
Motivation:
• Satellite servicing in LEO and GEO
• Active Debris Removal
• Astronaut assistance
• On-orbit assembly
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 5
T
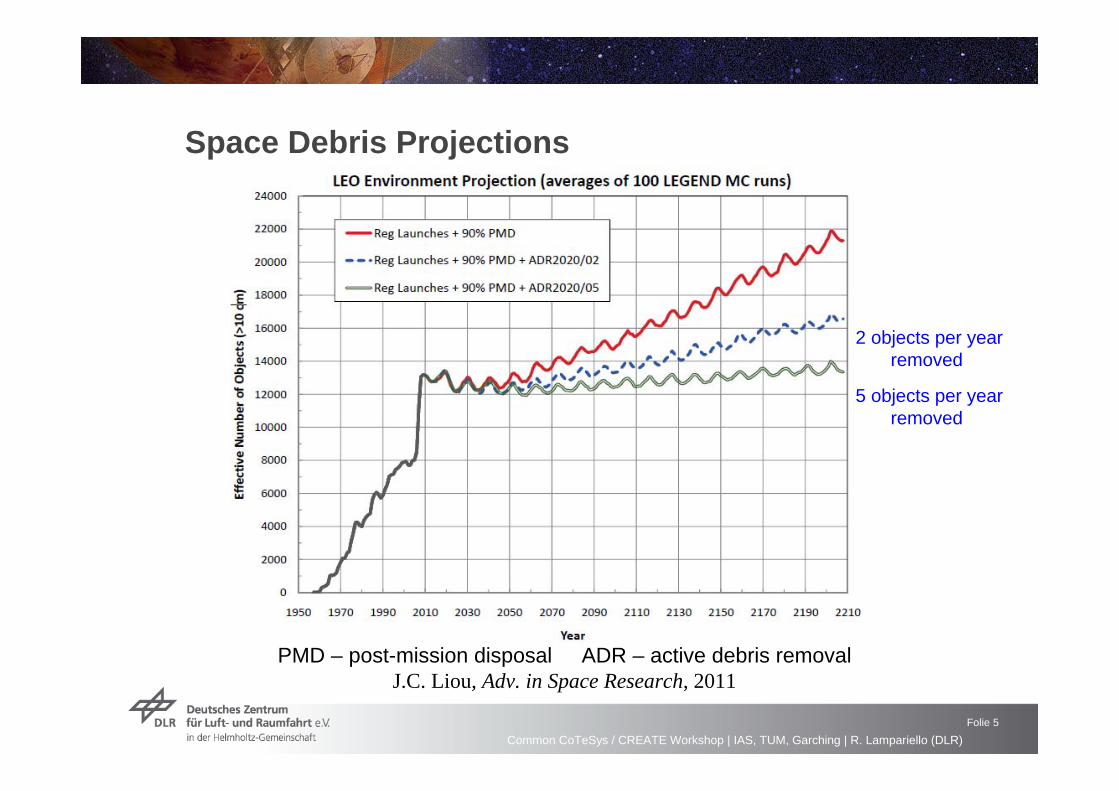
Space Debris Projections
PMD – post-mission disposal ADR – active debris removalJ.C. Liou, Adv. in Space Research, 2011
2 objects per yearremoved
5 objects per yearremoved
Common CoTeSys / CREATE Workshop | IAS, TUM, Garching | R. Lampariello (DLR)
Folie 6
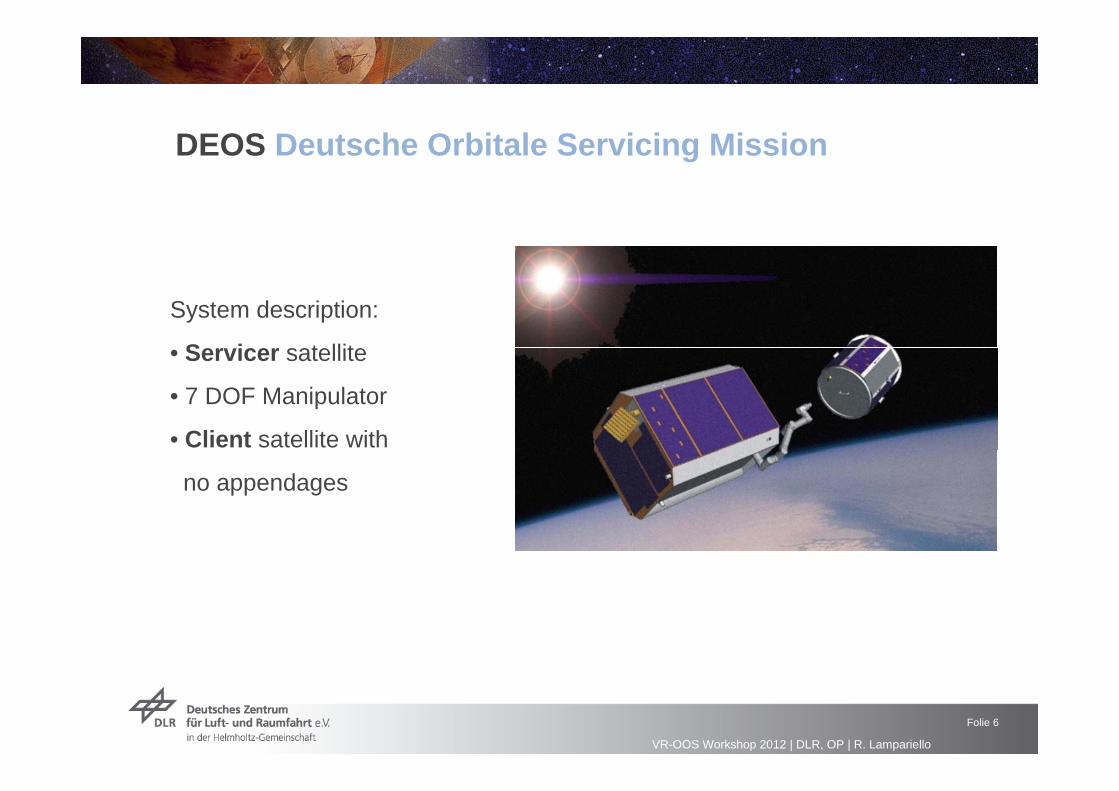
DEOS Deutsche Orbitale Servicing Mission
System description:
• Servicer satellite
• 7 DOF Manipulator
• Client satellite with
no appendages
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 7
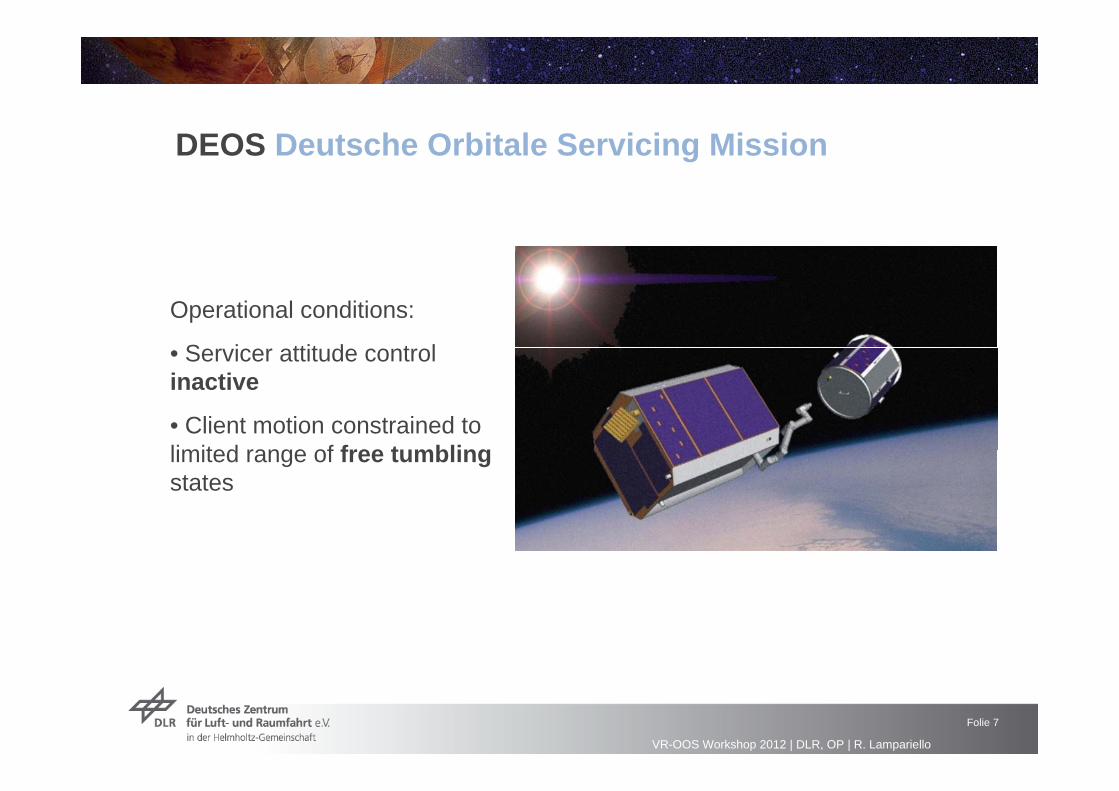
DEOS Deutsche Orbitale Servicing Mission
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Operational conditions:
• Servicer attitude control inactive
• Client motion constrained to limited range of free tumblingstates
Folie 8
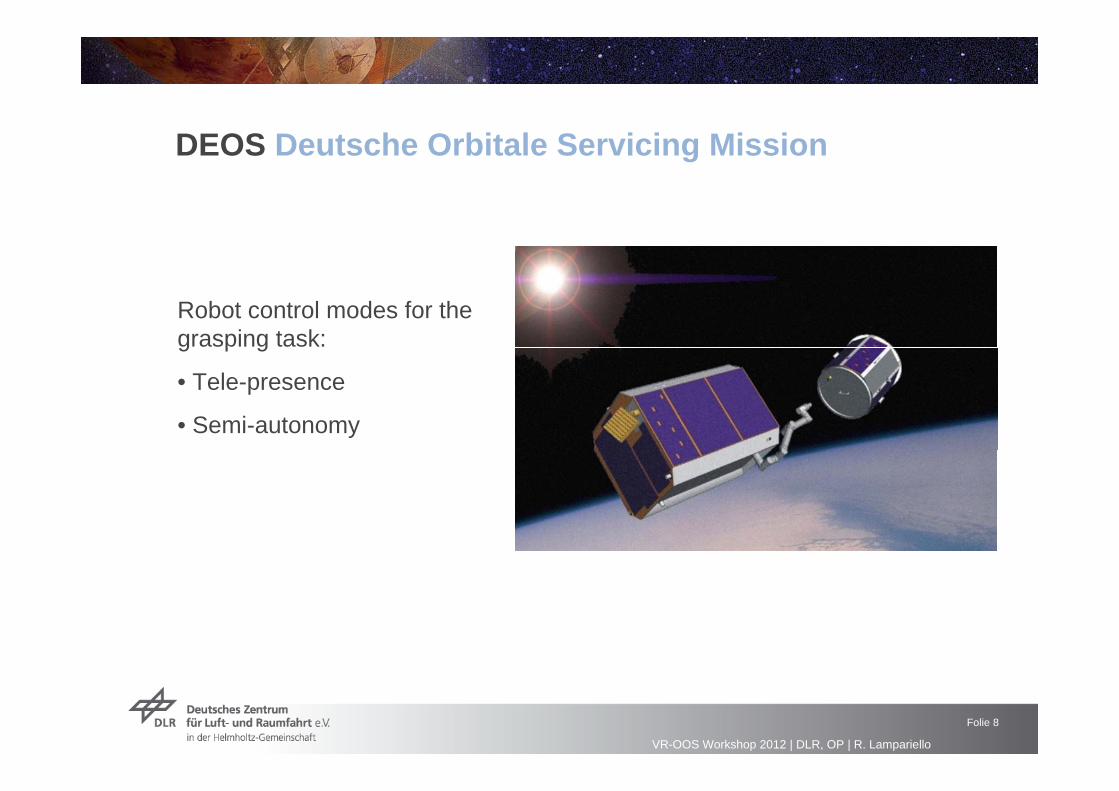
DEOS Deutsche Orbitale Servicing Mission
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
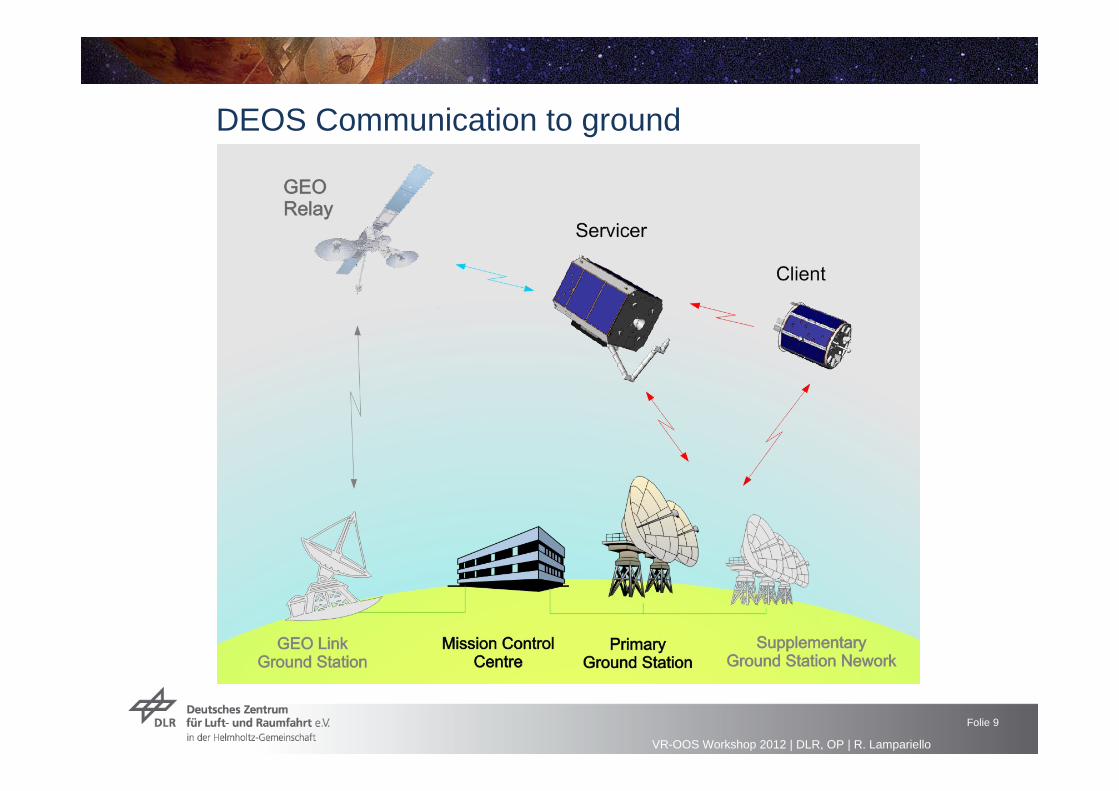
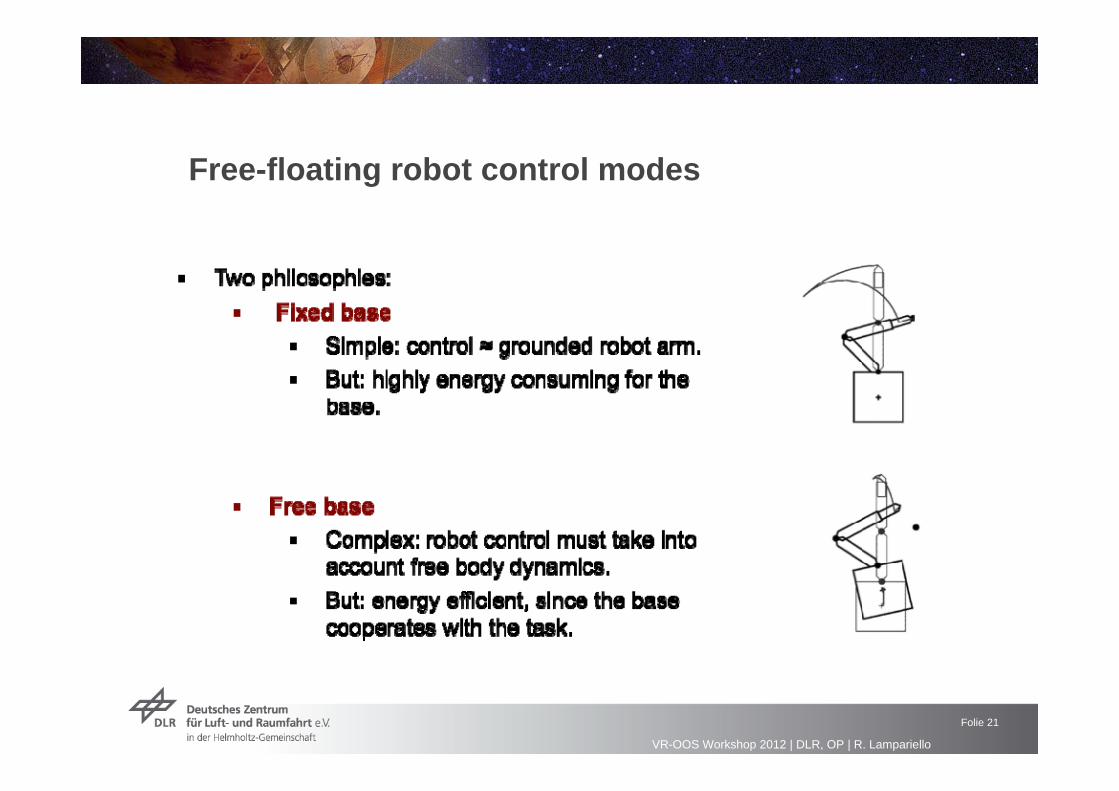
Robot control modes for the grasping task:
• Tele-presence
• Semi-autonomy
Folie 9
DEOS Communication to ground
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 10
The DEOS Simulator
• Develop a Servicer-Client test-bed for testing and validating grasping and stabilization strategies
• Identify the best possible strategies
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Goal
Folie 11
Requirements (1)
Must simulate free floating dynamics for both Servicer and
Client as realistic as possible
Must integrate a robotic arm with similar characteristics to the
DEOS arm
Must simulate all possible contact dynamics between all the
elements
Must have a large enough workspace
Must be up-scalable
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 12
Requirements (2)
Must be a development platform
Must help to identify critical points
Must integrate similar sensors
Must use identical software and operative system
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 13
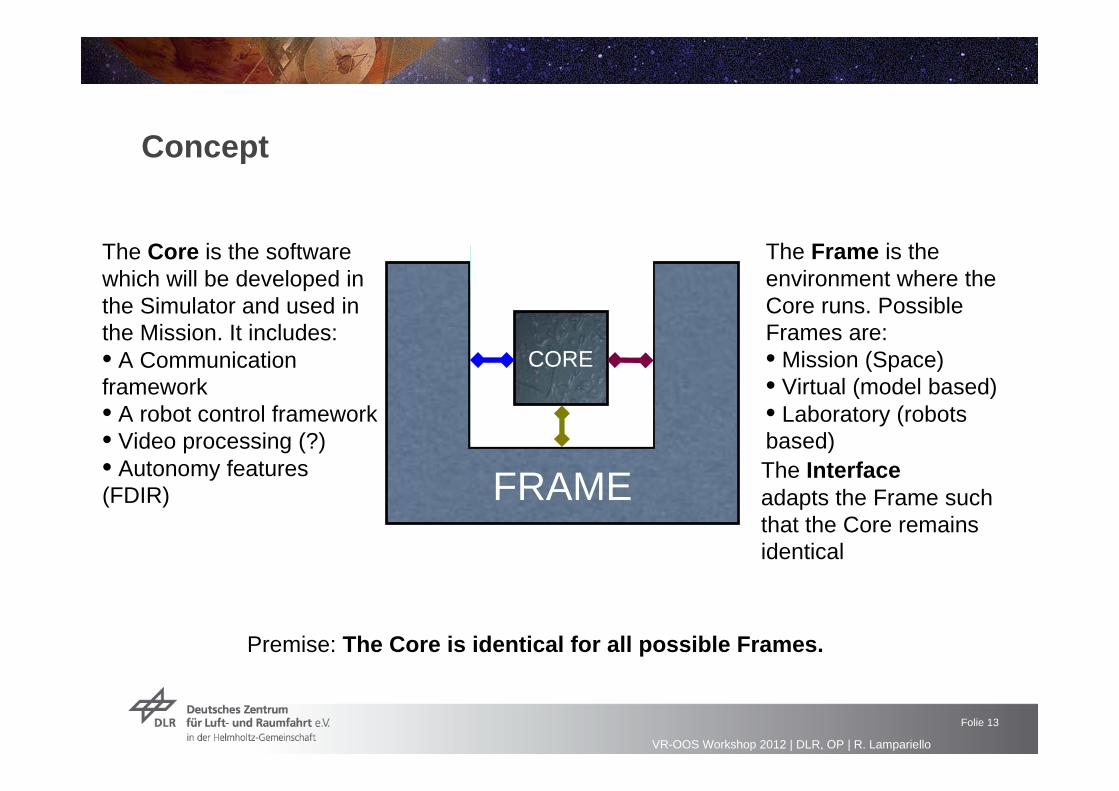
Concept
The Core is the software which will be developed in the Simulator and used in the Mission. It includes:• A Communication framework• A robot control framework• Video processing (?)• Autonomy features (FDIR)
The Frame is the environment where the Core runs. Possible Frames are: • Mission (Space)• Virtual (model based)• Laboratory (robots based)The Interfaceadapts the Frame such that the Core remains identical
FRAME
FRAME
CORE
Premise: The Core is identical for all possible Frames.
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 14
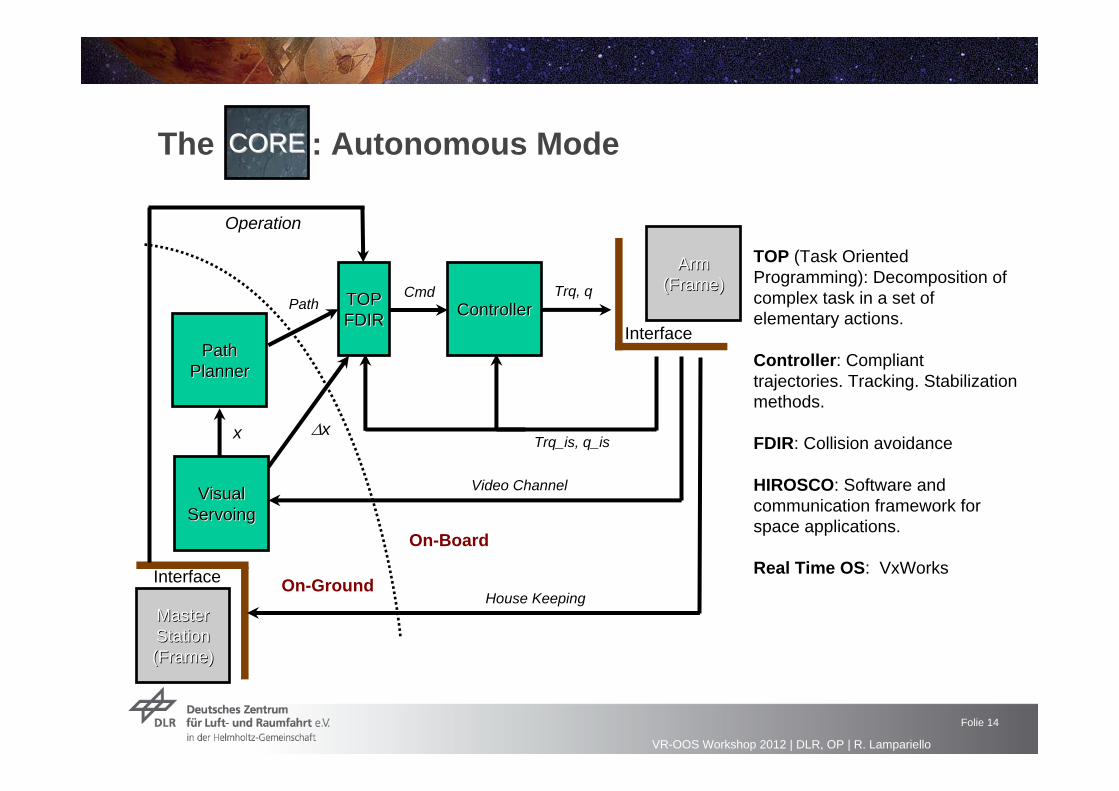
The : Autonomous Mode
TOP (Task Oriented Programming): Decomposition of complex task in a set of elementary actions.
Controller: Compliant trajectories. Tracking. Stabilization methods.
FDIR: Collision avoidance
HIROSCO: Software and communication framework for space applications.
Real Time OS: VxWorks
Operation
ControllerControllerTOPTOPFDIRFDIR
PathPathPlannerPlanner
VisualVisualServoingServoing
Video Channel
x
PathCmd Trq, q
ArmArm(Frame)(Frame)
Trq_is, q_is
Interface
On-Ground
On-Board
MasterMasterStationStation(Frame)(Frame)
InterfaceHouse Keeping
CORECORE
∆x
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 15
ControllerControllerTOPTOPFDIRFDIR
BilateralBilateralControlControl
BilateralBilateralControlControl
Operation
HapticChannel
Path Cmd Trq, q
ArmArm(Frame)(Frame)
Trq_is, q_is
Interface
On-GroundOn-Board
MasterMasterStationStation(Frame)(Frame)
InterfaceHouse Keeping
Video Channel
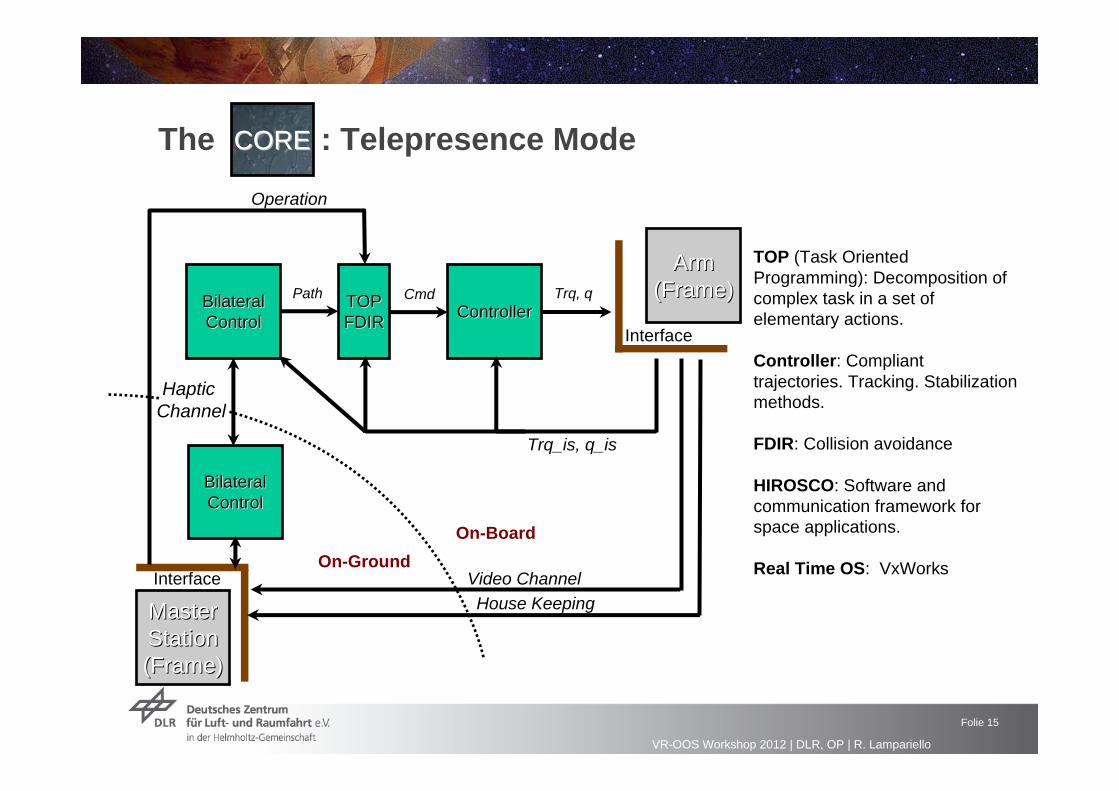
The : Telepresence Mode
TOP (Task Oriented Programming): Decomposition of complex task in a set of elementary actions.
Controller: Compliant trajectories. Tracking. Stabilization methods.
FDIR: Collision avoidance
HIROSCO: Software and communication framework for space applications.
Real Time OS: VxWorks
CORECORE
Haptic Channel
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 16
FRAME
FRAME
Mission
CORE
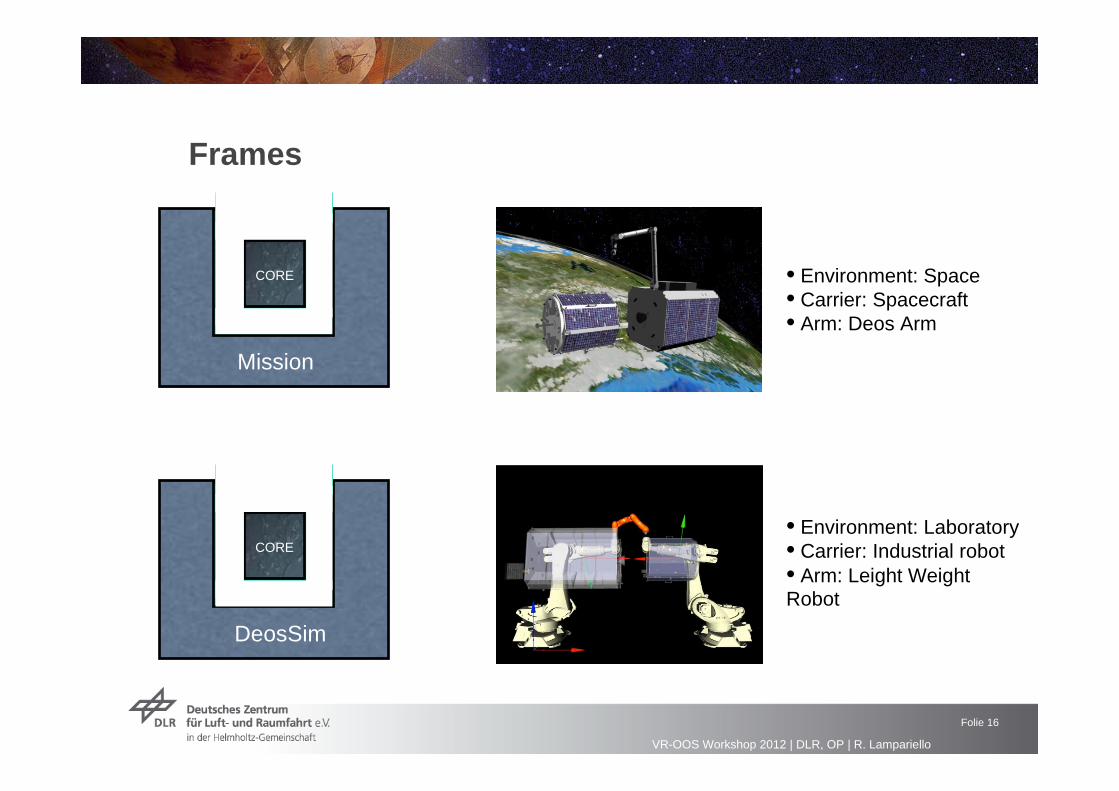
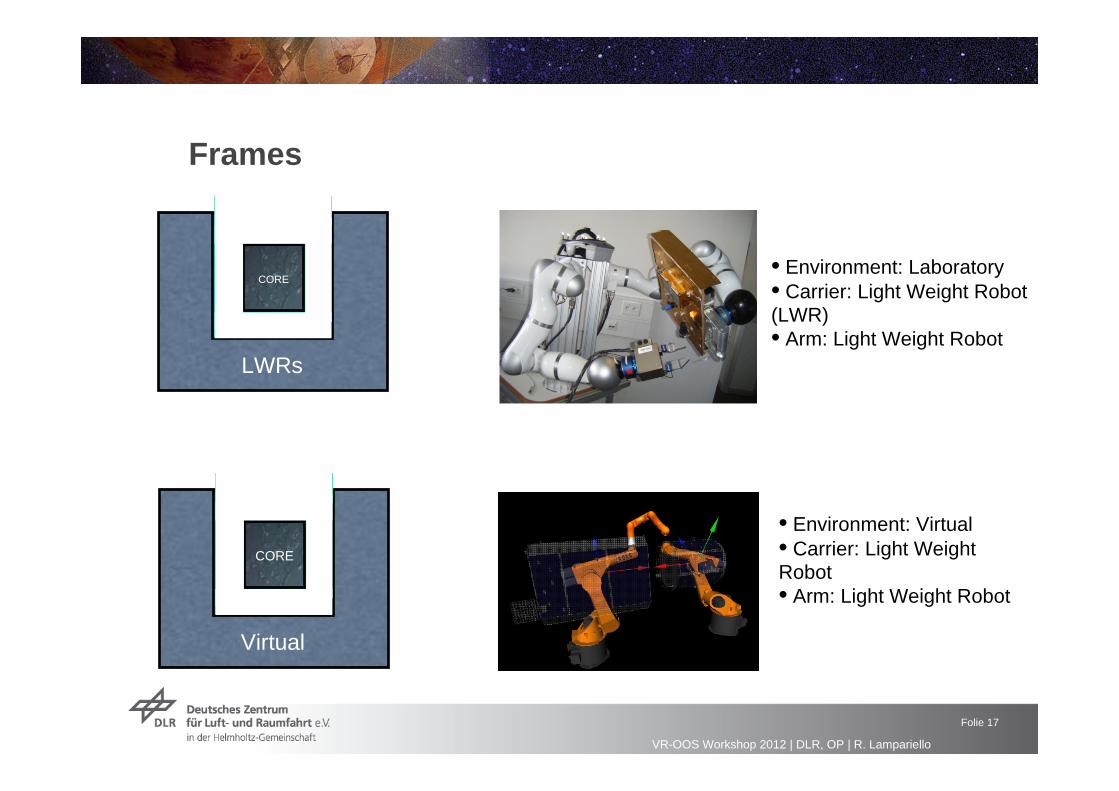
Frames
FRAME
DeosSim
CORE
• Environment: Space • Carrier: Spacecraft• Arm: Deos Arm
• Environment: Laboratory • Carrier: Industrial robot• Arm: Leight Weight Robot
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 17
Frames
FRAME
FRAMELWRs
CORE
FRAMEVirtual
CORE
• Environment: Laboratory • Carrier: Light Weight Robot (LWR)• Arm: Light Weight Robot
• Environment: Virtual • Carrier: Light Weight Robot• Arm: Light Weight Robot
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 18
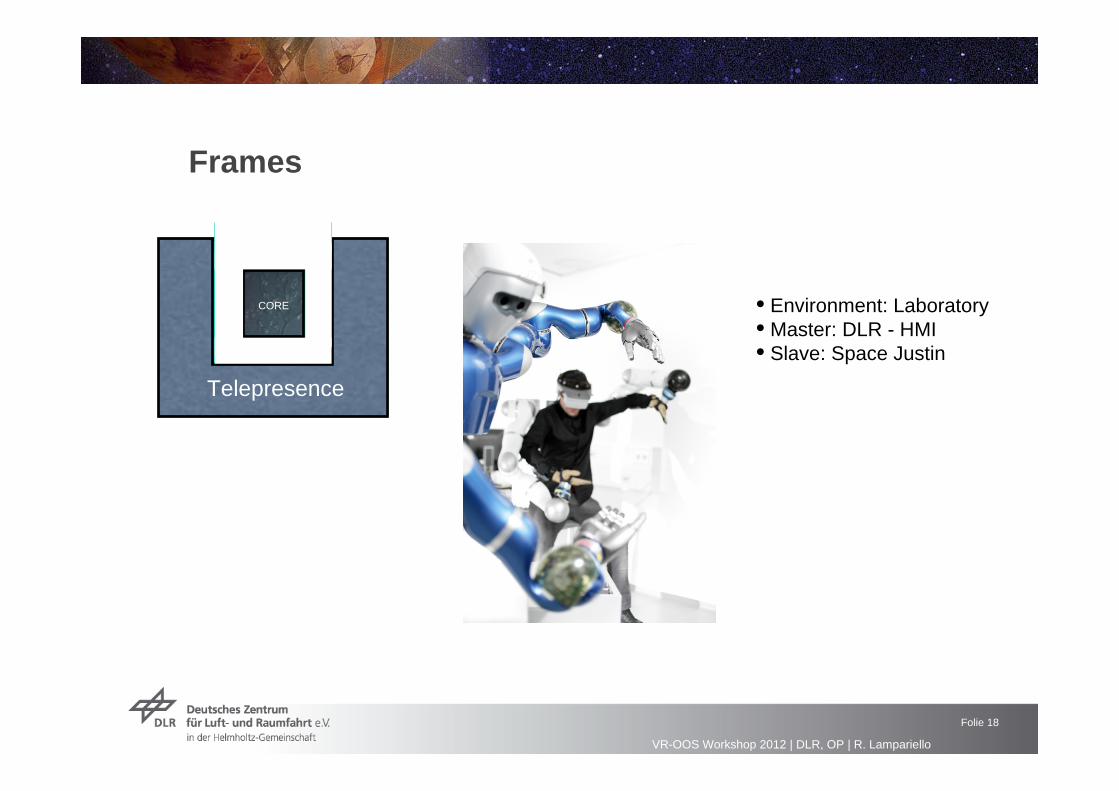
Frames
FRAME
FRAME
ffCORE • Environment: Laboratory
• Master: DLR - HMI• Slave: Space Justin
Telepresence
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 19
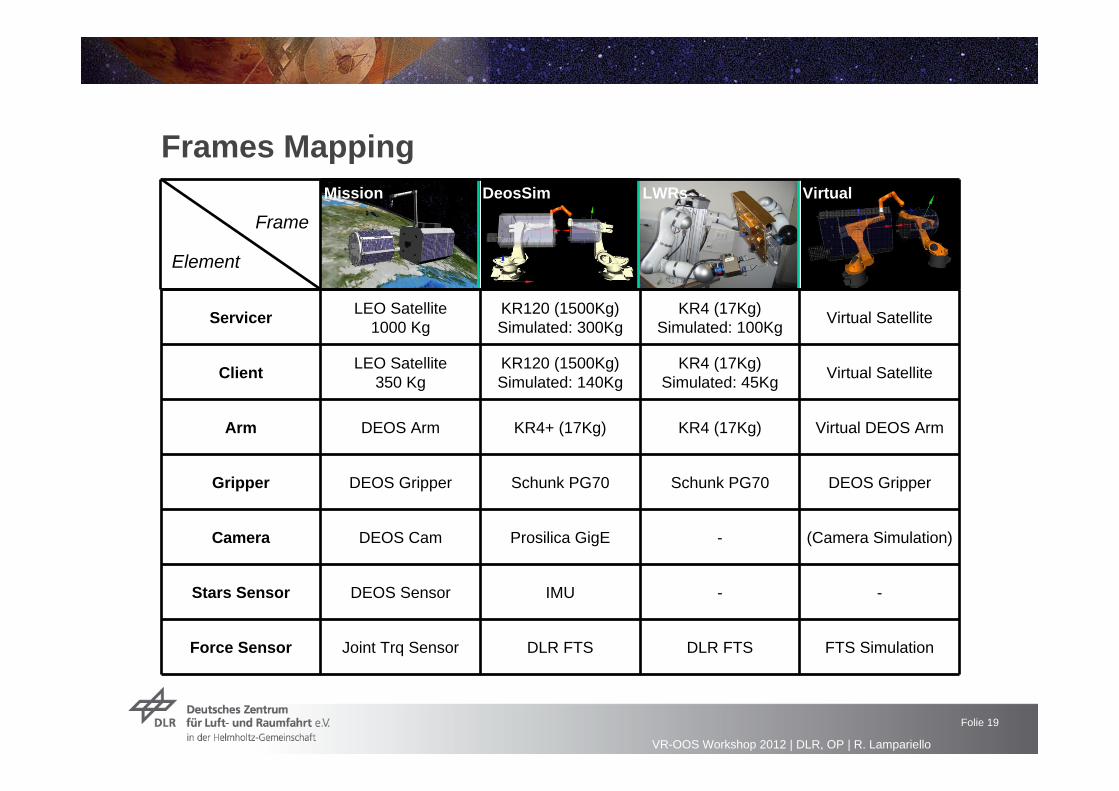
Mission DeosSim LWRs Virtual
Frames Mapping
Servicer LEO Satellite1000 Kg
KR120 (1500Kg)Simulated: 300Kg
KR4 (17Kg)Simulated: 100Kg Virtual Satellite
Client LEO Satellite350 Kg
KR120 (1500Kg)Simulated: 140Kg
KR4 (17Kg)Simulated: 45Kg Virtual Satellite
Arm DEOS Arm KR4+ (17Kg) KR4 (17Kg) Virtual DEOS Arm
Gripper DEOS Gripper Schunk PG70 Schunk PG70 DEOS Gripper
Camera DEOS Cam Prosilica GigE - (Camera Simulation)
Stars Sensor DEOS Sensor IMU - -
Force Sensor Joint Trq Sensor DLR FTS DLR FTS FTS Simulation
Frame
Element
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 20
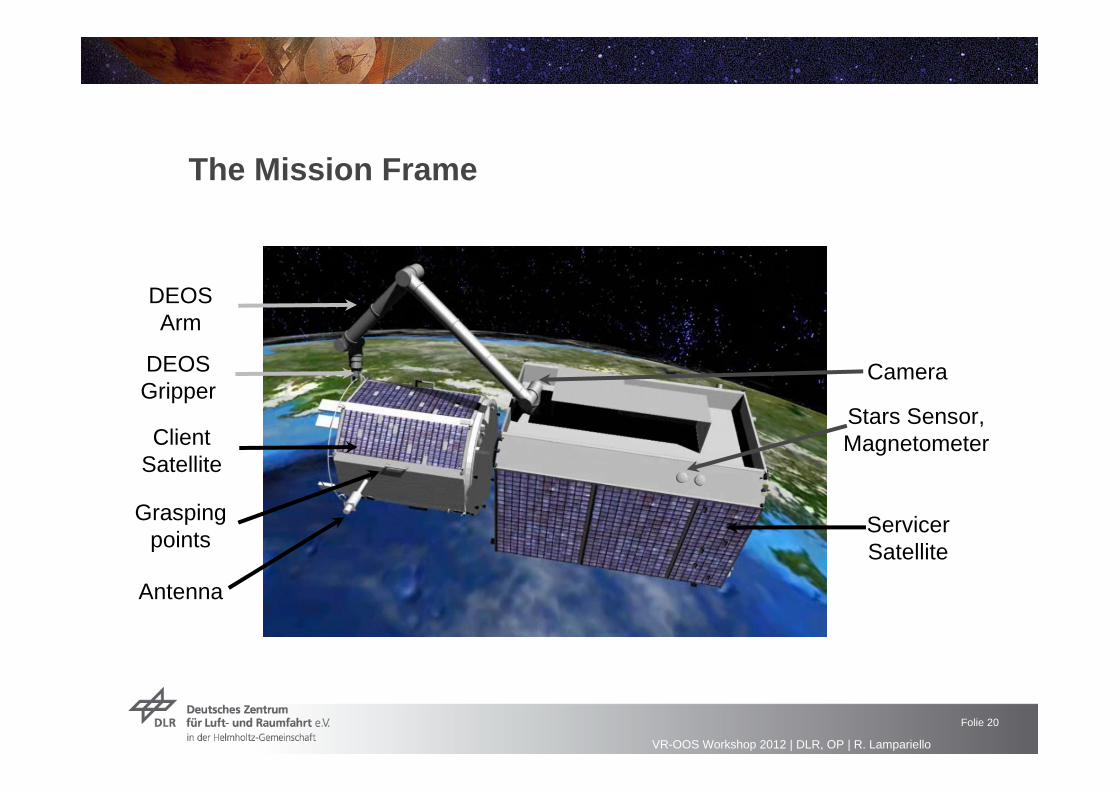
The Mission Frame
ClientSatellite
ServicerSatellite
DEOSArm
DEOSGripper
Camera
Stars Sensor,Magnetometer
Graspingpoints
Antenna
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 21
Free-floating robot control modes
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 22
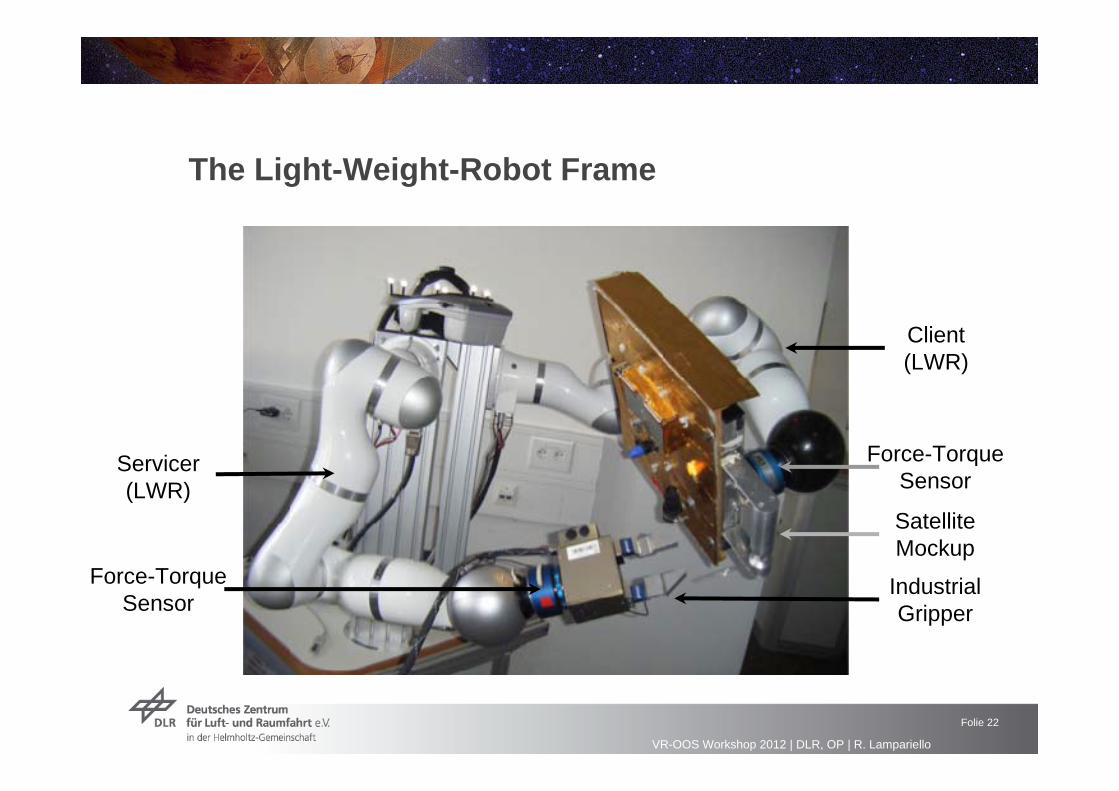
The Light-Weight-Robot Frame
Servicer(LWR)
Client(LWR)
SatelliteMockup
IndustrialGripper
Force-TorqueSensor
Force-TorqueSensor
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 23
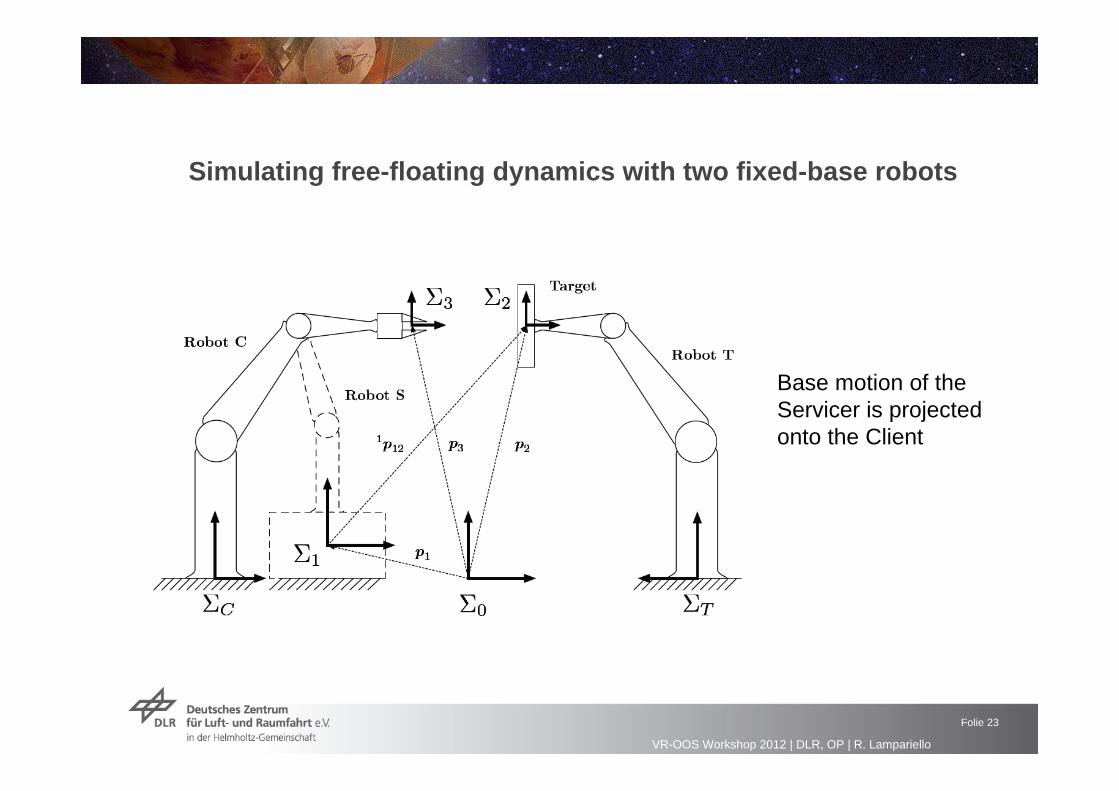
Simulating free-floating dynamics with two fixed-base robots
Base motion of the Servicer is projectedonto the Client
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 24
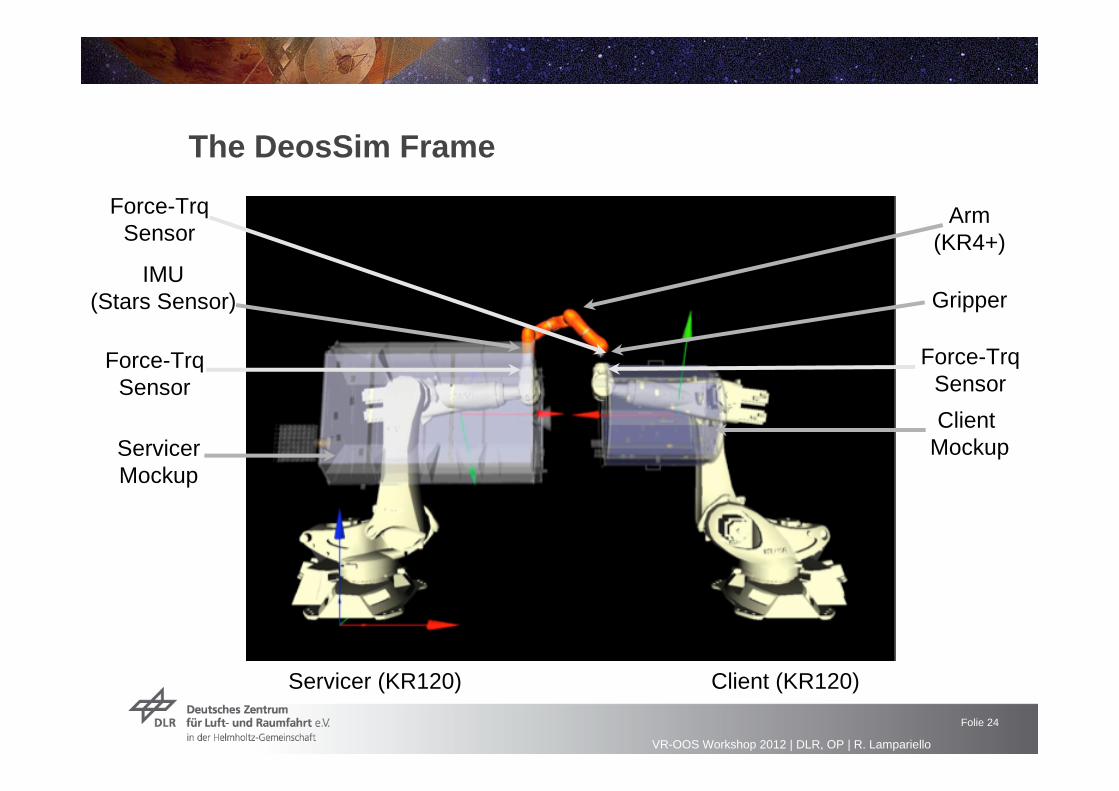
The DeosSim Frame
Servicer (KR120)
ServicerMockup
Client (KR120)
Arm(KR4+)
Client Mockup
Force-TrqSensor
Force-TrqSensor
Force-TrqSensor
IMU(Stars Sensor) Gripper
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 25
Conclusions
Different Simulation Frames have been presented
Each Frame is used for testing and verifying different elements
of the real mission
The Core remains identical in each frame
The simulator represents the design platform for the real
mission
Other uses for the simulator are planned, e.g. satellites with
solar panels or robot manipulators mounted on helicopters
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello
Folie 26
Thanks!
VR-OOS Workshop 2012 | DLR, OP | R. Lampariello










![Orbit type: Sun Synchronous Orbit ] Orbit height: …...Orbit type: Sun Synchronous Orbit ] PSLV - C37 Orbit height: 505km Orbit inclination: 97.46 degree Orbit period: 94.72 min ISL](https://img.pdfslide.us/doc/110x75/5f781053e671b364921403bc/orbit-type-sun-synchronous-orbit-orbit-height-orbit-type-sun-synchronous.jpg)





![Development of the Stanford GNSS Navigation Testbed for …€¦ · applications, including close-proximity operations such as on-orbit servicing and assembly [1], and science applications](https://img.pdfslide.us/doc/110x75/5f4ac4fb3b8ad4625a6a8c2f/development-of-the-stanford-gnss-navigation-testbed-for-applications-including.jpg)