Embed Size (px)
Citation preview

E L S E V I E R Wave Motion 20 (1994) 13-20 L
The continuation of the normal mode solution of the underwater acoustic wave equation
Richard B. Evans Science Applications International Corporation, #2 Shaw's Cove, Suite 203, New London, CT 06320, USA
Received 21 June 1993, Revised 11 January 1994
Abstract
Conditions are established that support the continuation of the usual normal mode, separation of variables, solution of the reduced wave equation in a lossy underwater acoustic waveguide. The conditions exclude the existence of generalized eigen- functions that occur when the loss is large enough to cause the eigenvalues of the lossless problem to coalesce. The existence of generalized eigenfunctions substantially complicates the normal mode solution for the acoustic field in the waveguide, so conditions that preclude their existence are of practical interest. The methods used to establish the conditions are taken from analytic perturbation theory. Examples are given to show how to use the conditions.
1. Introduct ion
First order perturbation theory, applied to the depth separated wave equation in underwater acoustics, dic- tates that the imaginary part of the square of the wave number produces a proportional change in the imagi- nary part of the eigenvalue. The eigenvalues of the lossless case move vertically, from the real line, into the complex plane. If an exact complex eigenvalue is required then Newton's method is applied. The process may be continued, but if the imaginary part of the square of the wave number is too great, the eigenvalues may begin to move horizontally [ 1, Fig. 2] and actually coalesce. In this case, the characteristic function has a multiple zero and Newton's method fails. The depth separated wave equation has multiple eigenvalues and generalized eigenfunctions are needed to construct the normal mode solution of the Helmholtz equation [ 1 ]. Unfortunately, the existence of multiple eigenvalues substantially complicates the normal mode solution. The purpose of this paper is to establish conditions
0165-2125/94/$07.00 © 1994 Elsevier Science B.V. All rights reserved SSDI0165-2125(94)00008-S
under which these complications do not occur. The reduced acoustic pressure P(r, z, s) due to a
harmonic point source with circular frequency to (the time dependence e -i'~'t is factored out) located at z = s and r = 0 in a horizontally stratified underwater acous- tic waveguide satisfies the nonhomogeneous Helm- holtz equation
V2p+k2(z )p = 8 ( z - s ) 6 ( r ) 2~rr ' ( 1 )
where the right hand side is the Dirac delta function in cylindrical coordinates. The operator V 2 is the Lapla- cian in cylindrical coordinates, k ( z )= to/c(z) is the depth dependent wave number, c(z) is the sound speed that is continuous on 0_< z_< H, and H is the thickness on the waveguide. The waveguide is assumed to be bounded by free surfaces. These physical boundary conditions are expressed by the boundary conditions
P(r, 0, s) =0 , P(r, H, s) = 0 . (2)
More general boundary conditions will be addressed in

14 R.B. Evans/Wave Motion 20 (19941 13-20
the theoretical discussion to follow. The free surface at z = H is usually hidden deep in an attenuating bottom and kZ(z) is complex [2, pp. 282-284]. The Sommer- feld radiation condition is imposed as r---* oo.
The solution method that is best suited to the contin- uation procedure used here is the resolvent Green's function technique [3]. The solution of Eq. (1) is expressed as the contour integral
1 f ! / _ / (1 ) P(r, z, s) = - - G(z, s, A) (~/Ar) dA. 2~ri 4 "" o ,
c
(3)
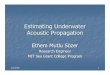
where the integration is along a contour C that separates the singularities of the range and depth separated Green's functions as shown in Fig. 1. The range sepa- rated Green's function is ( i /4) times the Hankel func- tion of order zero, type 1 wherein the imaginary part of
is assumed to be nonnegative. The range separated Green's function has a branch cut singularity.
The depth separated Green's function G(z, s,A) sat- isfies
d2G - - + [ k 2 ( z ) - A ] G = - ~ ( z - s ) , (4) dz 2
along with
G(0, s, A) =0 , G(H, s, A) = 0 . (5)
The depth separated Green' s function is a meromorphic function of A, so its singularities are all poles of finite multiplicity [4, pp. 190-192]. The poles of the Green's function are eigenvalue of the homogeneous counter-
/ /
/ /
/
• -- 0 0 0 000
Im
\\
P o l e s o f G
o o o C )
C u t f 0 r ,vr'~ -
\ \ \
I Re
Fig 1. The contour of integration C used in the resolvent Green 's function representation of the acoustic field is shown• The contour separates the singularit ies of the range and depth separated Green 's functions• The contour may be enclosed in a counter c lockwise direc- tion in the upper half plane around the poles of the depth separated Green ' s function G to yield a residue series representation of the
acoustic field.
part of Eq. (4). The attenuation in the waveguide forces the eigenvalues into the complex plane and separates the singularities of the range and depth separated Green's functions as shown in Fig. 1.
The contour integral solution in Eq. (3) can be jus- tified, formally, by applying the partial differential operator in Eq. ( 1 ), enclosing the contour around the singularities of the range or depth separated Green's function, and relying on one of two completeness rela- tions [ 3 ]. The contour integral solution in Eq. (3) can be verified rigorously by applying the Hankel transform directly to Eq. ( 1 ) and unfolding the resulting integral on the interval [0, oo] into the contour C. This neces- sarily requires a small amount of attenuation in the waveguide and uses the radiation condition [5, pp. 19- 45].
The contour integral in Eq. (31 can be efficiently evaluated by enclosing the contour around the poles of the depth separated Green' s function and applying res- idue theory to obtain a residue series representation of the acoustic field, assuming that the depth separated Green's function is sufficiently well behaved for large
I;tl. If the poles of the Green's function are simple then,
after considering the rest of the integrand in Eq. (3), the residue contribution from a pole at A, is found [4, p. 310] to be
• 2 iNn qb,(z)chn(s)n~oll( v ~ , r ) (6)
4
where th, is an eigenfunction corresponding to A, and
H --1/2
o
is a normalization factor. The residue in (6) should contain the complex conjugate of the eigenfunction of the adjoint of the homogeneous counterpart of Eq. (4). This reduces to the original eigenfunction because the adjoint is the complex conjugate. These results imply that, if the poles of the Green's function are simple, then the residue series is the usual normal mode solu- tion.
If the poles of the Green' s function have order greater than one, then the residue at the poles must also incor- porate generalized eigenfunctions [ 6, pp. 37-41 ] (also called associated functions [ 6, pp. 16-20] ). The resi- due series solution is not the usual normal mode solu-

R.B. E vans / Wave Motion 20 (1994) 13-20 15
tion [ 1 ]. Most, if not all, acoustic normal mode codes designed to solve Eq. ( 1 ) are not prepared to handle this situation.
It should be possible to use the usual normal mode theory when the attenuation is moderate. This expec- tation is based on analytic perturbation theory [7-9]. The components of the spectral theory are analytic in a small complex neighborhood of the zero value of a perturbation pacameter that determines the amount of attenuation. More specifically, what is needed in the underwater acoustic application is the assurance that the form of the normal mode solution is invariant in an interval about the zero value of the perturbation param- eter along with a readily computable estimate for the size of this interval.
The analytic perturbation theory in Chatelin [ 9, pp. 139-143] is applied to the underwater acoustic prob- lem. A continuation argument is used that introduces the attenuation (imaginary part of k2(z) ) by way of a continuous parameter. An easily computable bound on the norm of the attenuation profile is obtained. It is shown that if the norm of the attenuation profile is less than the bound then the poles of the depth dependent Green's function remain simple as the attenuation is gradually introduced. As a result, the usual normal mode solution can be retained. The bound is determined by the minimum separation of the eigenvalues of the unperturbed self-adjoint problem.
The underlying ideas that are used are implicit in the analytic perturbation theory of Kato [ 7, pp. 375-393 ], Reed and Simon [8, pp. 10-25], and Chatelin [9, pp. 139-143]. The explicit application of these ideas, as presented here, has not appeared in the literature. Nei- ther have these ideas been previously interpreted in a form that can be readily used in the computation of solutions of the underwater acoustic wave equation.
2. Continuation of the normal mode solution
The results mentioned in the Introduction depend on methods of functional analysis, specifically analytic perturbation theory as found in Ref. [9, pp. 139-143]. To proceed with the discussion, it is convenient to define some operators. The remaining definitions and concepts, which are used, are reviewed in the Appen- dix.
Define the differential operator T(~) by
d2u T(E)u= ~ + [b(z) +da(z ) lu , (8)
where b(z) and a(z) are continuous real valued func- tions on [0, H] and E is in the interval [0,1]. The quantity in the square brackets in Eq. ( 8 ) is k 2 (z) from Eq. (1), a(z) is the attenuation profile, and e is the continuation parameter. Let the domain of definition of T( , ) be the subset of L2(0, H) of twice continuously differentiable functions that satisfy the separated boundary conditions
du(0) Bou=au(O) + fl = 0 , (9)
dz
Bnu = 7u(H) + 6 du(H) = 0 , (10) dz
where a, t , y and 8 are real numbers satisfying c~2+/32=#0 and ,)/2_{_ ~2 =//= 0.
The analysis of the operator T(e) starts with E--0 so it is important to single out the attenuation operator A defined by
Au= - ia ( z )u , (11)
then T(E)= T ( 0 ) - cA. The operator norm IIAII (see the Appendix for a definition) is equal to II T( 1 ) - T(0) II. If this difference is not to large then it can be expected that T( 1 ) will inherit the simple eigen- value structure of T(0) and the residue series solution will be the usual normal mode solution. The following discussion shows that these conclusions are justified provided that the operator norm [IA II is less than half the minimum separation AA(0)min (see Eq. (A.9)) of the eigenvalues of T(0).
The other operator that is important to the analysis of T(E) is the resolvent operator R(~, A) defined by
R(e, A) = [ T ( E ) - A ] - I , (12)
for complex numbers A in the resolvent set p (T(e) ) (see the Appendix for a definition). The approach [ 9, pp. 140o141 ] depends on the identity
T ( ~ ) - A = [1-eAR(0 , A)] ( T ( 0 ) - A ) , (13)
for A in p(T(0) ) . The identity Eq. (13) yields the Neumann series for R( e, A) given by
R(E, A) =R(0, A) [1-eAR(0 , A ) ] - '

16 R.B. Evans/ Wave Motion 20 (1994) 13-20
=R(0 , h) ~ [eAR(0, h)] k. (14) k = 0
This series converges in the operator norm provided that a bound for the largest eigenvalue of the bounded operator [e(0, h)] (i.e., the spectral radius) is less than one. This can be accomplished by making ~ small. The resolvent R(E, A) is an analytic function of e as long as
[el <I/r¢[AR(O, A)] , (15)
where r~[AR(O, h)] is the spectral radius of the bounded operator [AR(0, A)]. Although • could be complex we will restrict • to the real interval [0,1 ].
As mentioned in the Introduction, the components of the spectral theory are analytic functions of • as long as Eq. (15) is valid [9, pp. 140-141]. In particular, consider a simple pole An(0) of R(0, A). The spectral projection (see Eq. (A.8)) associated with An(0) has a one dimensional range that is the invariant subspace associated with An (0). The dimension of the invariant subspace associated with An(e) is the algebraic multi- plicity of An(E) and is an analytic function of • as long as Eq. (15) is valid. Since the algebraic multiplicity of An(e) is an integer, it must be a constant. This assures the continuation of simple eigenvalues. In the follow- ing, • is allowed to take on all values in the interval [0,1 ] and Eq. (15) becomes a condition on the size of
Ilall.
lytic function [9, pp. 140-141 ] of E for [ E I _< 1 and h on F..
The dimension of the the range of the spectral pro- jection P . (e ) is a continuous integer valued function (constant) on [0,1 ]. The dimension of the the range of P . (e ) is the sum of the algebraic multiplicities of the eigenvalues of T(e) inside Fn. Since T(0) has a single eigenvalue inside / ' . with an algebraic multi- plicity of one, T(e) must have a single eigenvalue inside/ ' , with an algebraic multiplicity of one for all • in the interval [0,1 ]. Therefore R(E, A) has a simple pole inside/ ' , for all e in the interval [0,1 ].
Steinberg [ 10] andHowland [ 11 ] have studiedmer- omophic families of compact operators and obtained hypotheses that imply the poles are simple. These hypotheses are more complicated than those presented here and do not lend themselves to computation.
The Theorem is simultaneously valid at each of the eigenvalues {An(0), n = 1, oo} of T(0). The spectrum of T(•) can be generated as a continuation of the spec- trum of T(0). Each of the eigenvalues of T(e) has an algebraic multiplicity of one for e in the interval [ 0,1 ]. All the poles of R(E, A) are simple for each • in the interval [ 0,1 ]. The corresponding statement is also true for the Green's function G( e, z, s, A) that satisfies
(T(E) -- A) G = - 8 ( z - s),
BHG = 0.
BoG = 0,
(18)
Theorem. If the norm of the operator A satisfies IIAII < AA(0)min/2 and if I" n is a circle in the complex plane centered at A n (0) with a radius AA (0) rain / 2 then R(e, A) has a simple pole inside IVn for all e in the interval [0,1 ].
Corollary. If the norm of the operator A satisfies IIAU < A"t(0)min/2 and if z and s are fixed in [0, H] then all of the poles of G( •, z, s, A) are simple for all • in the interval [0,1].
Proof. The contour Fn is contained in p (T(0 ) ) . Since T(0) is self-adjoint, the resolvent satisfies [9, p. 116]
IIg(0, A)II = [dist(h, o '(T(0) ) ) ] -1 = [ Ah(0)~n/2] - l ,
(16)
for h on Fn. Applying the assumption regarding A, the spectral radius of [AR(0, A) ] is bounded by
r~[AR(O, h)] < IIAII IIR(0, A) U < 1 (17)
on Fn. Thus, the resolvent operator R(e, A) is an ana-
Proof. The poles of G(e, z, s, A) are eigenvalues of T(e) and, consequently, are poles of the resolvent R(E, h), for all • in the interval [0,1]. The poles of G ( e, z, s, A) are simple by virtue of their location. They remain inside the circles Fn, n = 1, oo and cannot coa- lesce, which is the only way a multiple pole could form.
The Corollary, the regularity of the boundary con- ditions (see Appendix) that assures the appropriate the large [ A [ asymptotic behavior of the depth separated Green's function, and the argument used in the Intro- duction regarding the residue at simple poles imply that

R.B. E vans / Wave Motion 20 (1994) 13-20 17
the usual normal mode solution of Eq. (1) can be retained in the form
P(r, z, s, E)
i ~ = 4 E N2(E)dPn(z' E)dPn(S'E)H~°I)(A~(')r)
n = l
(19)
for E in the interval [0,1] provided that IIAII < AA(0)mi,/2. Note that the singularities of the depth and range separated Green' s functions are not separated in the lossless case so Eq. (19) must be obtained, in the limit, as E tends to zero.
3. E x a m p l e s
As the primary example, consider an acoustic wave- guide 200 meters thick with free boundaries as described in the Introduction. The sound speed is taken to be c(0) = 1500 m/s at the surface and c(H) = 1700 m/sec at the bottom where H = 200 m. It is initially assumed that there is no attenuation in the waveguide. The acoustic source is taken to have a frequency of f = 100 Hz so that to= 2~rf= 200,tr rad./s. The square of the (real) wave number k2(z) is assumed to be a linear function of depth. Note that k2(z) is the same as b(z) inEq. (8).
For this example, the homogeneous counterpart of Eq. (4) is
d2u dz 2 + [(gz+h) - A ] u = 0 , (20)
where h = k 2 ( 0 ) = [ to/c(0)] 2 and g = [k2(H) - k2(0) ] / H is the gradient of the square of the wave number. The boundary conditions are the same as those in Eq. (5).
Eq. (20) can be solved in terms of Airy functions by making the transformation
X(Z, A) = -- [gl/az+g-2/3(h-A)] . (21)
The solution of Eq. (20) that satisfies u(0, A) --0 is given by
u(z, A)--*l[Ai(x(z, A)) Bi(x(0, A))
-Bi(x(z , A)) Ai(x(0, A))] , (22)
where 7/is an arbitrary normalization factor. The nor- malization will be chosen such that
Ii 7 I lu l l = u2(z, A)dz = 1. (23) 0
The normalization process is simplified by the fact that the integrand in Eq. (23) is an exact differential given by
u2=g -1-~ (gz+h-A)u2+ . (24)
The real eigenvalues An = An(0) are the roots of the characteristic equation
u(H, A)=0. (25)
The strategy for finding the eigenvalues is briefly sum- marized. First note that if the differential equation Eq. (20), with A = An, is multiplied by u(z, An) and inte- grated over the interval [ 0,H], the boundary conditions can be used to show [ 1 ] that
An <max{(gz+h) : 0 < z < H } . (26)
Since g is negative in this example, An<k2(0). The search for An is started at k2(0). Small steps are taken until a zero crossing of u(H, A) is found; then bisection is used to find the eigenvalue. The required values of the Airy functions and their derivatives are obtained by the algorithm of Schulten, Anderson and Gordon [ 12]. The normalization Eq. (23) is helpful in controlling the exponential growth and decay encountered in eval- uating the characteristic equation, Eq. (25).
The first 400 eigenvalues were found. For n > 20, the separation of successive eigenvalues grows almost linearly with n. It is assumed that the large I A I asymp- totic distribution of the eigenvalues, which predicts a linear growth of the separation of successive eigenval- ues [6, pp. 64-65], has been attained for n > 400. The minimum separation of the first 400 eigenvalues was AA~n = A6- A7 = 3.4484 x 10 - 3 and this is assumed to be the minimum separation of all the eigenvalues.
Now the attenuation profile may be introduced into the waveguide. The attenuation profile is the function a(z) in Eq. (8). It will be assumed, for simplicity, that a(z) = az is a linear function of depth where the con- stant a is the gradient in the attenuation profile. The norm of the attenuation operator is given by Eq. (A.3) in the Appendix as
IIAII = lalH. (27)

18 R.B. Evans/ Wave Motion 20 (1994) 13-20
The hypothesis IIA II < m~tmin/2 of the Corollary in Sec- tion 2 is satisfied if lal <8.621 × 10 -6. This implies that the poles of the Green's function are simple and the usual normal model solution of Eq. (1) can be retained. If a = 8.0 X 10 -6, then the imaginary part of the square of the wavenumber is 1.6 × 10- 3 at z = 200 m. In physical units, this corresponds to a loss of approximately 0.25 dB per wavelength for a plane wave propagating in free-space with this wavenumber.
As a second example, consider the waveguide in the example that motivated the analysis [ 1 ]. This wave- guide has the same thickness as in the above example, but the real part of the sound speed is a constant function of depth with c = 1500 m/s and the frequency is f = 25 Hz. When there is no attenuation, the eigenvalues can be found exactly to be A,=k2-nZ~r2/H 2, n= 1, where k = 2¢rf/c. The minimum separation of the eigen- values is A~min = 3~r2/H 2 and is independent of fre- quency. The hypothesis of the Corollary is satisfied if l al < 1.85055 X 10-6 and this assures that the poles of the Green's function are simple. The attenuation gradient that produced the double pole in the example in Ref. [ 1] has a magnitude of 1.231425 X 10 -5. This is almost one order of magnitude larger. If a = 1.85 X 10 -6, then the imaginary part of the square of the wavenumber is 3.7× 10 -4 at z=200 m or approximately 0.92 dB per wavelength.
ysis such as those found in Ref. [9, chap. 2 and 3]. These methods are reviewed in this Appendix.
Let L2(0, H) be the Hilbert space of square integra- ble complex valued functions on the interval (0, H) with the inner product defined by
H
(u, v) = I u(z)C(z)dz (A.I )
o
where the overbar means complex conjugation. The norm on L2(0, H) is given by Ilull =<u, u> '/2. The domain of definition of the differential operator T(E) in Eq. (8) is the subspace of L2(0, H) of twice differ- ential functions satisfying the boundary conditions in Eqs. (9) and (10).
The norm of the attenuation operator in Eq. ( 11 ) is defined as the maximum of IIAull for u in L2(0, H) satisfying II ull = 1. Since a(z) is continuous, it attains a maximum on [0, H] and it follows that
IIAU = la(z)u(z ) [2 dz / 0
<max{ a(z) l :O<z<H} , (A.2)
for IluU = 1. The upper bound on IIAuU in Eq. (A.2) can actually be attained by choosing u to exclusively emphasize the maximum value of I a (z) I and as a result
4. Summary
If the real eigenvalues of the self-adjoint depth sep- arated acoustic wave equation are not too closely spaced and if a small amount of attenuation is intro- duced into the waveguide then the eigenvalues can not move far enough to coalesce. The normal mode solu- tion retains the same form that it has in the self-adjoint case. The meaning of closely spaced eigenvalues and small amounts of attenuation is made clear by the hypothesis of the Corollary in Section 2.
Appendix. Aspects of the spectral theory of linear differential Operators
The results presented in the preceding sections depend on classical methods from the spectral theory of linear operators found in Refs. [4, chap. 7 and 12] and [ 6, chap. 1 and 2 ] and methods of functional anal-
IIAII =max{ la(z) : 0 < z < H } . (A.3)
The investigation focuses on the family of boundary value problems given by
( T ( a ) - A ) u = 0 ,
Bou =0, BHu=O, (A.4)
where B0 and BH are defined in Eqs. (9) and (10). It is assumed that the coefficients in the boundary con- ditions are real and satisfy a ,z +/32 4= 0 and y2 + ~2 4= 0. These conditions can be broken down into three cases that are the same as the cases specified by Coddington and Levinson [4, p. 306]. The conditions assure the existence of the Green's function G(E, z, s, A), defined in Eq. (18), for large IAI and imply a certain large I,~1 asymptotic behavior of G(a, z, s, A). The three cases are also the same as the regularity conditions in Naimark [6, pp. 62-63]. Also see Birkhoff [ 13] and Dunford and Schwartz [ 14, p. 2322]. Regular bound-

R.B. Evans/Wave Motion 20 (1994) 13-20 19
ary conditions imply that the eigenvalues have a pre- dictable large I A I asymptotic distribution [ 6, pp. 64- 651.
The existence of the Green's functions for any A implies that the characteristic determinant is not iden- tically zero and allows the explicit construction [4, p. 192 ] of the Green' s function G ( E, z, s, A) except at the eigenvalues of T(E). The Green's function is a mero- morphic function in the complex A plane for fixed z and s in [0, H] and E in the interval [0,1]. The poles of G(~, z, s, A) are eigenvalues [6, p. 37] of T(~). The solution of the nonhomogenous boundary value prob- lem
(T(E) --h)u = f ,
Bou=0, B H u = O , (A.5)
can be found using
H
u(z) = / G(e, z, s, A) f ( s ) ds. (A.6) 0
The set of complex numbers A for which T(e) - A fails to have a bounded inverse is the spectrum of T(E) and is denoted by tr(T(~)). The complementary set, for which T(E) -- A has a bounded inverse, is the resol- vent set of T(E) and is denoted by p(T(E) ). The resol- vent operator R(e, A) is defined in Eq. (12) for complex numbers A in p(T(e) ). The resolvent operator is an integral operator whose kernel is the Green's function. The effect of the resolvent on a functionfis described by
H
R(e, A)f(z) = / G(e, z, s, A)f(s) ds. (A.7) o
The resolvent R(e, A) is a compact (bounded) opera- tor. This implies that the spectrum of T(e) is a count- able set of isolated eigenvalues with finite algebraic multiplicities [9, p. 119] and has the form o-(T(~)) = {An(e) : n= 1, ~}. The resolvent is a meromorphic operator and has a Laurent series expansion [ 9, p. 108 ] about each of the eigenvalues of T(~).
The spectral projection Pn(E) is defined by
Pn(E) = - - R(E, A) dA, (A.8) 2i'rr
ar~
Am(E) with m 4: n. The spectral projection is useful in distinguishing between the algebraic and geometric multiplicity of eigenvalues. The function Pn(~) is a continuous operator valued function of E on the interval [0,1].
The algebraic multiplicity of an isolated eigenvalue An(e) is the dimension of the invariant subspace cor- responding to the eigenvalue. The invariant subspace is the range of the spectral projection Pn (~). The eigen- functions corresponding to An(e) and the correspond- ing generalized eigenfunctions form a basis for the invariant subspace.
The geometric multiplicity of an eigenvalue An(E) is the dimension of the eigenspace, which is the null space of T ( e ) - A n ( e ) Since the eigenspace is con- tained in the invariant subspace, the geometric multi- plicity is always less than or equal to the algebraic multiplicity. An eigenvalue is simple if its algebraic multiplicity is one.
An eigenvalue An(E) is semi-simple if the invariant subspace and the eigenspace are the same. The alge- braic and geometric multiplicities are equal. There are no generalized eigenfunctions corresponding to the eigenvalue. A semi-simple eigenvalue has an ascent of one. The ascent is the order of the pole of the resolvent expanded about the eigenvalue [9, p. 108].
All of the coefficients in the boundary conditions in Eq. (A.4) are real, so the operator T(E) is self-adjoint if and only if m (z) is identically zero [ 4, ex. 1, p. 201 ]. The spectrum of T(0) is a countable set of real eigen- values with no finite limit point. The choice of the sign o n d E u / d z 2 in Eq. (8) assures that the eigenvalues can be arranged in a decreasing sequence that tends to - ~. Since T(0) is self- adjoint, the multiple eigenvalues of T(0) are semi-simple [9, p. 116]. All the eigenvalues have equal algebraic and geometric multiplicities.
The boundary conditions in Eq. (A.4) are separated and two linearly independent solutions cannot satisfy the same boundary condition at one end of the interval [15, p. 241]. All the eigenvalues of T(0) have geo- metric multiplicity equal to one. Consequently, all the eigenvalues of T(0) have an algebraic multiplicity of one and are simple.
The minimum separation of the eigenvalues is denoted by
where F, is a circle centered at An(~) that contains no

20 R.B. Evans/ Wave Motion 20 (1994) 13-20
A~(0 ) m in
=rain{ IAn(0) - A m ( 0 ) I : n ~ m , n, m = l , o¢} . (A.9)
The eigenvalues of T(0) are simple poles of the oper- ator R(0, A). The poles of the Green's function G(0, z, s, A) occur at An(0) and are also simple [4, ex. 7, p. 202].
Acknowledgement
The author would like to thank Mr. R.L. Deavenport of the Naval Undersea Warfare Center, New London, Connecticut for making available a number of useful references.
References
[ 1 ] R.B. Evans, "'The existence of generalized eigenfunctions and multiple eigenvalues in underwater acoustics", J. Acoust. Soc. Am., 92, 2024-2029 (1992).
[2] P.M. Morse and K.U. Ingard, TheoreticalAcoustics, Princeton University Press, Princeton (1986).
[3] R.L. Deavenport, "A normal mode theory of an underwater acoustic duct by means of Green's function", Radio Sci. 1, 709-724 (1966).
[4] E.A. Coddington and N. Levinson, The Theory of Ordinary Differential Equations, McGraw-Hill, New York (1955).
[5] D.S. Ahluwalia and J.B. Keller, "Exact and asymptotic representations of the sound field in a stratified ocean", Wat,e Propagation and Underwater Acoustics, J.S. Papadakis and J. B.Keller, eds., Lecture Notes in Physics, vol. 70, Springer, New York (1977).
[6] M.A. Naimark, Linear Differential Operators, Part I, Ungar, New York (1967).
[7] T. Kato, Perturbation Theory of Linear Operators, 2nd ed., Springer, New York (1976).
[8] M. Reed and B. Simon, Methods of Modern Mathematical Physics, Part IV, Analysis of Operators, Academic Press, San Diego (1978).
[9] F. Chatelin, Spectral Approximations of Linear Operators, Academic Press, New York (1983).
[ 10] S. Steinberg, "Meromorphic families of compact operators", Arch. Rat. Mech. Anal., 31,372-379 (1968).
[ 11 ] J.S. Howland, "'Simple poles of operator-valued functions", J. Math. Anal. Appl., 36, 12-21 ( 1971 ).
[12] Z. Schulten, D.G.M. Anderson and R.G. Gordon, "An algorithm for evaluation of complex Airy functions", J. Computational Phys., 31, 60-75 (1979).
[ 13] G.D. Birkhoff, "Boundary value and expansion problems of ordinary differential equations", Trans. Amer. Math. Soc. 9, 373-395 (1908).
[ 14] N. Dunford and J.T. Schwartz, Linear Operators, Part Ill, Spectral Operators, Wiley, New York ( 1971 ).
[ 15] E.L. Ince, Ordinary Differential Equations, Dover, New York (1956).