Embed Size (px)
Citation preview
The Benefits of Extended Liability∗
Yolande Hiriart† and David Martimort‡
This Version: June 14, 2005
Abstract: We characterize the optimal regulation of a firm which undertakes an
environmentally risky activity. This firm (the agent) is protected by limited liability and
bound by contract to a stakeholder (the principal). A key feature is the non-observability
of the level of safety care exerted by the agent. This level of care depends both on the
degree of incompleteness of the regulatory contract (i.e., whether private transactions can
be controlled or not) and on the allocation of bargaining power between the principal and
the agent. Increasing the wealth of the principal that can be seized upon an accident has no
value when private transactions are regulated but might strictly improve welfare otherwise.
We derive bounds on the principal’s wealth so that the second-best complete regulatory
outcome can still be achieved with an incomplete regulation if it is supplemented by an
ex post extended liability regime. Extensions to the cases of multiple principals and of a
ban on regulatory rewards are also analyzed.
∗Financial support by the French Ministry of Ecology and Sustainable Development is acknowledged.We are indebted to the editor Joseph Harrington and to two referees for useful comments which havemuch improved the presentation of the paper. We also thank for comments Denis Gromb and audiencesat various seminars and conferences.†Universite de Toulouse (IDEI, LERNA).‡Universite de Toulouse (IDEI, GREMAQ) and Institut Universitaire de France.
1

1 Introduction
Extending liability towards deep-pocket stakeholders of firms engaged in environmentally
risky activities has been a major building block of recent legislations towards environmen-
tal accidents. For instance, under the U.S. 1980 Comprehensive Environmental Response,
Compensation, Liability Act (CERCLA), any owner or operator of an environmentally
risky venture may be found liable for the losses generated by the firm’s activity if the latter
is itself judgment-proof, i.e., if its assets cannot cover the cleanup costs of contaminated
sites.1 Despite the international tendency towards strict liability for environmental harm,
a general agreement on the rationale for relying on liability rules is still missing.2 Extend-
ing liability towards stakeholders has often been viewed as a successful legal response to
finance the remediation of hazardous sites or to indemnify victims (a compensation role).
Common sense suggests that it might also foster incentives for prevention by inducing
private actors to internalize the environmental concerns of the rest of society (an incen-
tive role). This legal doctrine has nevertheless encountered fierce opposition both among
practitioners and scholars. Opponents argue that the benefits of extending liability also
come with some costs. On top of the administrative costs of litigation, extended liability
might change transactions between risky ventures and their contracting partners. Market
structures could be modified accordingly.
This paper gives some theoretical foundations for using a regime of extended liability
and, more broadly, analyze how private transactions between principals and their agents
are modified accordingly. The key justification for doing so is the incompleteness of the
regulation. Indeed, the contracts linking the firm to various stakeholders might affect the
level of care chosen by the firm and thus impact on the environment. These contracts
should thus be regulated in one way or the other. We show in this paper that, even when
no such regulation is possible, the threat of extended liability might induce private actors
to internalize environmental concerns and design private transactions accordingly.
Designing a complete regulation may be of a tantamount difficulty when the set of
partners who contract with the firm performing some hazardous activities and who can
1CERCLA Section 107 (a) casts an extremely broad net in defining those persons that can be liablefor the costs of responding to a release of hazardous substances: current or former owners or operators ofthe facility or vessel, those who arranged for treatment or disposal of hazardous substances at a facility,the transporters of the hazardous substances, and more generally anyone involved in the management ofhazardous substances. Several cases have illustrated this legal doctrine. In the 1986 U.S. v. MarylandBank and Trust case, for instance, a bank was found liable for cleanup costs as an effective “owner” of thefacility at the time the pollution was discovered. More generally, the deep pocket of creditors and otherstakeholders has been requested when such partners were contractually tied with judgment-proof firmsand involved in a sufficiently close relationship. Strasser and Rodosevich (1993) offer a nice perspective onthe principles governing the interpretation of CERCLA. Boyer and Laffont (1996) review the Canadian,the American and the European legal frameworks.
2See Faure and Skogh (2003), Chapters 14 and 17.
2

therefore influence the management of environmental risk is not clearly defined at the
design stage.3 Even if the relevant stakeholders can be found out ex ante, environmental
regulators generally do not have the statutory or the auditing rights, or even the expertise,
to control the contracts which bind those stakeholders to the firm’s management.4 The
regulation of environmental risk in such a context is thus necessarily highly incomplete and
leaves these contracts by large uncontrolled. As a result, these contracts may influence care
taking in ways which are detrimental to social welfare. Because of this incompleteness,
relying ex post on liability might improve welfare by putting the various stakeholders of
the firm under the threat of being sanctioned for having wrongly distorted the firm’s care
taking if a bad environmental performance occurs.
We determine circumstances under which an incomplete regulation can be improved by
ex post liability rules. We start with a bare boned model of a vertical relationship between
an agent who is subject to environmental risk regulation and liability, and his principal.
We first characterize the optimal complete regulation in a moral hazard framework where
the agent’s level of safety care is non-verifiable but the transaction between the principal
and this agent can be controlled. Moral hazard and limited liability5 force the regulator
to leave a socially costly rent to the agent to induce care. Reducing this rent requires a
downward distortion of the level care below the first-best.
When the transaction is itself non-verifiable, the regulatory contract is incomplete.
This incompleteness may increase significantly the social costs of inducing safety care.
To the rent left to the agent to induce care, one must now also add the rent left to his
principal so that he designs a private transaction which does not undermine care taking.
Increasing the amount of wealth collectable from the principal under a liability regime
helps nevertheless reducing these extra agency costs. Extended liability may be a rough
substitute for a more complete regulation.
To understand more precisely how this substitution works, note that the regulator faces
two different moral hazard problems. First, he must induce the cashless agent to exert
the proper level of prevention. Second, the regulator must also ensure that the private
transaction linking the principal and the agent does not interfere with the regulatory
incentives for safety care. If this transaction was regulated, these two problems could be
addressed separately. First, the regulator could force the principal to make a payment for
the agent’s services independent on his environmental performances. Private transactions
3For instance, it is often argued that one major problem faced by the Environmental Protection Agencyregulators when enforcing the Resource Conservation and Recovery Act (RCRA) for underground storagetanks is that owners are often difficult to locate.
4As an example, Boyd (2001, p.21) notes that “corporate financial auditing is not a traditional strengthof environmental regulation”.
5Environmentally risky firms are often small in scale since they conceal assets in order to be insulatedfrom the threat of paying for damages. See Ringleb and Wiggins (1990).
3

would thus not affect care taking. Second, the regulator could design a convenient set
of regulatory rewards and punishments to induce the agent to exert care. Extending the
principal’s liability would then be useless since, de facto, the principal would not interfere
with the agent’s management of environmental risk.
When private transactions cannot be regulated and a regime of extended liability is
used, the principal is concerned with the agent’s environmental performances since he
may be prosecuted to pay fines following an accident. Part of the benefits from private
contracting may be dissipated through these fines. Private contracting is modified accord-
ingly. This is where the distribution of bargaining power in private contracting matters.
The higher the principal’s bargaining power, the less he will be prone to leave the rent that
a cash-constrained agent must receive to exert care. Private contracts are thus designed
with an eye on reducing this rent. This calls for reducing the level of care performed by
the agent. The unregulated design of private contracting thwarts regulatory incentives.
Anticipating this countervailing effect, an incomplete regulation must induce the prin-
cipal to design a private contract which gives to the agent the correct incentives for safety
care. This can be done by increasing sufficiently fines through a liability regime. However
the principal’s wealth may not suffice to cover large fines. We characterize a lower bound
on the principal’s wealth above which the incompleteness of the regulation does not hurt
if extended liability is also used. Below this bound, one reaches a third-best outcome
characterized by significant care distortions. The principal can still be induced to choose
the right private transaction from a social viewpoint but he must also receive a rent to
do so. The rents left to both the principal and the agent compound and the social cost
of inducing care increases. As a result, the downward distortion in care is exacerbated.
When the agent has most of the bargaining power, he can reap most of the surplus
from the transaction with his principal. When this surplus is independent of the agent’s
environmental performances, contracting has no impact on care taking. Increasing the
principal’s wealth at stake is then useless. More generally, there is a positive relationship
between the wealth needed from a principal to induce care and his bargaining power.
Our paper belongs to a burgeoning literature starting with Pitchford (1995), Heyes
(1996) and Boyer and Laffont (1997) who focus on the relationship between a firm and
its financiers. Those papers argue that extending liability towards fund providers of risky
ventures may not be a panacea. In Pitchford (1995), the competitive financier can only
recoup his financial loss in the event of an accident by asking for higher repayments when
no accident occurs. This depresses the agent’s incentives for exerting safety care. Boyer
and Laffont (1997) argue that increasing the financiers’ liability can deter participation to
projects which are socially valuable. Heyes (1996) shows that increasing liability changes
the pool of loan applicants. Earlier critics have shown that extending liability and putting
4

more of the financiers’ wealth at stake recovers some value when principals have most
of the bargaining power (Balkenborg (2001)) or when the damage technology is more
complex than the binary accident-no accident technology used by Pitchford (1995) (Lewis
and Sappington (2001a)). These contributions detail how optimal private contracting
reacts to liability rules. However, the regulatory response to private contracting discussed
there is quite trivial since regulators are concerned only with efficiency and not with rent
extraction.6 In addition, since the only public policies which are available consist of ex
post liability rules, it is hard to figure out whether the cost of extending liability comes
from this restriction or from some more fundamental economic phenomenon. Instead,
we explore optimal regulatory policies when the rents accruing to the private sector are
socially costly. In full generality, a regulatory contract policy should involve both fines if
an accident occurs and rewards if good environmental performances are observed. This
normative approach highlights how agency costs compound when the regulator does not
control private transactions. It allows us to characterize conditions on the principal’s
wealth under which the incompleteness of the regulatory contract can be circumvented.
Section 2 presents the model. Section 3 characterizes the optimal regulation when
moral hazard on safety care is the only issue. The transaction between the principal and
the agent can be fully observed and controlled. In Section 4, we relax this assumption and
explore the optimal regulatory policy and its dependence on the allocation of bargaining
power between the principal and the agent. In Section 5, we extend the analysis to the
case of multiple principals and discuss the case of an institutional constraint banning
regulatory rewards. Section 6 concludes. Proofs are relegated to an Appendix.
2 Model
A cashless firm (the agent) exerts an activity that may provoke an accident harming third-
parties and/or the environment. This agent is bound by contract to a stakeholder (the
principal). The agent’s services generate a surplus Π on behalf of the principal.7 There is a
whole range of activities for which our analysis is relevant. For instance, the agent could
run underground storage tanks or disposal facilities on behalf of parent firms, dispose
wastes collected from clients, or transport hazardous substances on behalf of producers.
A financier could also provide capital to the firm in which case Π would be the net value
of the agent’s project. We should already stress that these different kinds of principals
may significantly differ in terms of their available wealth.
The firm’s activity being risky, an environmental harm D may occur with probability
6A noticeable exception is Boyer and Laffont (1997).7See Boyd and Ingberman (1997) for an earlier model keeping this degree of generality.
5

1 − e. The probability that no accident occurs e is normalized so that it is equal to the
agent’s level of safety care (or effort). To exert such an effort, the agent incurs a non-
monetary cost ψ(e). For technical reasons, we assume that ψ′ > 0, ψ′′ > 0, and ψ′′′ > 0
and that the Inada conditions ψ′(0) = 0 and ψ′(1) = +∞ hold so that effort is always
interior.This effort is not observed neither by the principal nor the regulator.
Without loss of generality, a regulatory scheme stipulates payments za and zn to the
agent depending on whether an accident occurs or not. Such a scheme can, for instance,
be understood as resulting from the use of ex post liability following a damage (a fine
−za > 0 imposed on the agent if he has enough earnings from the principal’s contract,
and on the principal if liability is extended) and of an incentive reward (zn > 0) following
good environmental performances. Indeed, since the agent has no cash to indemnify
harmed third-parties, the principal’s contribution may be needed following a damage
if the requested fine is too large and cannot be paid by the agent out of the earnings
he made from contracting with the principal. Even though they do not a priori target
the principal, fines that cannot be paid by the cashless agent end up being paid by
the principal if liability is extended and the principal is himself wealthy enough. Since
private transactions can undo any allocation of liabilities, it does not really matter who
originally bears the fine. This Equivalence Principle is now well-known from the earlier
works of Newman and Wright (1990) and Segerson and Tietenberg (1992) and will be
used at several places below. In particular, we will argue that the incompleteness of
the regulatory contract calls for increasing the fines imposed on the principal/agent pair.
With the Equivalence Principle in mind, such an increase in fines can be reinterpreted as
relying more on extended liability.
Although our modeling uses the direct monetary nature of rewards and punishments,
broader interpretations are available. Bad environmental performances sometimes come
also with damages to the fixed capital of the firm and to some stakeholders (like workers).
Cost may also be indirect: future regulations might be tightened, environmental audits
may be more frequent in the future, the government may refuse authorizations and permits
or raises taxes. Rewards may also stem from the firm’s gains in reputation vis-a-vis its
customers, the government, shareholders and the financial community.8, 9
Denoting by (yn, ya) the payments made by the principal to the agent in each state of
nature, we can rewrite the agent’s expected payoff as:
U = e(zn + yn) + (1− e)(za + ya)− ψ(e).
8On the indirect costs and benefits of a good management of environmental risks, see Lesourd andSchilizzi (2001).
9Those non-monetary transfers may also be socially costly. For instance, reputation gains may alsocreate switching costs in the relationship between the firm and some of its contractual partners. Similarly,tightening future regulations may reduce entry.
6

The risk-neutral principal’s net benefit from the transaction is thus given by:
V = Π− eyn − (1− e)ya.
Since the agent has no cash, what really matters from the regulator’s viewpoint is the
wealth w collectable from the principal. We will study how the regulatory outcomes and
the level of safety care may change with w and ask under which circumstances putting
more of the principal’s wealth at stake improves welfare. Of course, the principal can
engage in a variety of strategies to hide the true value of his assets (accounting manipu-
lations, “flight-by-night” techniques, creating cashless subsidiaries, etc...). We will thus
view w as the part of the principal’s wealth which can be easily observed and possibly
seized when an accident occurs.
The regulator maximizes a social welfare function which takes into account not only
the profits of the private sector, the budgetary cost of the regulatory scheme and the
cleanup cost or financial amount reimbursed to harmed third-parties. Following Laffont
and Tirole (1993), the regulator’s objective function can be expressed as:
W = U + V − (1 + λ)((1− e)D + ezn + (1− e)za),
where λ > 0 is the positive cost of public funds.10 For future reference, it is useful to
rewrite the regulator’s objective as:
W = (1 + λ) (Π− (1− e)D − ψ(e))− λ (U + V ) . (1)
This expression stresses the trade-off faced by the regulator in designing an optimal reg-
ulation. On the one hand, an efficient level of care maximizes the first bracketed term.
On the other hand, inducing such level of effort under moral hazard may require leaving
a rent U + V to the private sector. This rent is costly when λ is positive. This trade-
off distinguishes our analysis from the previous literature11 which assumes that rents in
the private sector are socially costless. Assuming that rents are socially costly allows us
to stress how different contracting modes affect this social cost and to characterize how
distortions in the level of care depend on the contracting environment.
Full Control: As a benchmark, let us suppose that both the effort e and the private
transaction (yn, ya) can be observed and regulated. The regulator’s problem becomes:
(R∗) : max{e,U,V }
(1 + λ)(Π− (1− e)D − ψ(e))− λ(U + V )
10We could as well assume that harmed third-parties receive a weight γ in the regulator’s objectivefunction so that W = U + V − γ(1 − e)D − (1 + λ)(ezn + (1 − e)za). This alternative formulationcould be useful to capture the often-heard claim that environmental regulatory agencies and judges inenvironmental litigation put more emphasis on victims when γ > 1. This would clearly not change ourresults provided that D is replaced by D′ = γD
1+λ .11Pitchford (1995), Balkenborg (2001) and Lewis and Sappington (2001a).
7

subject to constraints U ≥ 0 and V ≥ 0.
These two constraints ensure participation of the agent and the principal. At the com-
plete information optimum, these participation constraints are obviously binding and the
private sector withdraws no rent (U = V = 0) from its activity. The first-best effort level
e∗ is such that the marginal benefit of reducing the likelihood of an accident equals the
marginal cost of effort:
D = ψ′(e∗). (2)
To implement this outcome, the regulator can first impose the standard e∗; second, require
the principal to leave the whole surplus of the transaction to the agent by setting y∗a =
y∗n = Π; third, force a fixed regulatory payment z∗n = z∗a = −Π + ψ(e∗) to ensure that the
agent breaks even.
Of course, the regulator might not observe all the relevant variables needed to im-
plement this first-best outcome. Either the effort e or both the effort and the private
transaction (yn, ya) might not be observable and can only be indirectly controlled through
the regulatory scheme (zn, za) that the regulator imposes on the sole agent. The analysis
of these settings with limited control will be the purpose of the next sections.
3 Moral Hazard in Safety Care
Under moral hazard, neither the regulator nor the principal can observe the agent’s effort.
Nevertheless, the regulator has still enough instruments to regulate the private transac-
tion. In this complete regulation setting, the regulator can impose the payments made
by the principal to the agent for any realization of his environmental performance.
Maximizing his expected profit, the agent chooses an effort satisfying the following
moral hazard incentive constraint:
zn + yn − (za + ya) = ψ′(e). (3)
Using (3), the agent’s expected utility becomes:
U = e(zn + yn) + (1− e)(za + ya)− ψ(e) = R(e) + za + ya.
Following Laffont and Martimort (2002, Chapter 4), we will define the agent’s limited
liability rent as R(e) = eψ′(e) − ψ(e) which is increasing and convex in e (R′(e) =
eψ′′(e) > 0 and R′′(e) = eψ′′′(e) + ψ′′(e) > 0). Being cashless, the agent is protected by
limited liability in the damage state so that za + ya ≥ 0. Inducing the agent to undertake
8

a level of safety care e requires thus to leave him a liability rent R(e). We must have:12,13
U ≥ R(e). (4)
The principal’s participation constraint is:
V = Π− eyn − (1− e)ya = Π + ezn + (1− e)za − ψ(e)− U ≥ 0. (5)
The principal’s liability constraint can be written as Π− ya ≥ −w or, using (5),
V ≥ −e(yn − ya)− w. (6)
Under moral hazard, the regulator’s problem becomes therefore:
(RSB) : max{e,U,V,za,zn}
(1 + λ)(Π− (1− e)D − ψ(e))− λ(U + V ),
subject to constraints (4) to (6).
We summarize this optimization in the next proposition.
Proposition 1 Assume that there is moral hazard on safety care but that the private
transaction can be regulated. The optimal regulatory policy induces a second-best effort
level eSB such that eSB < e∗ and:
D = ψ′(eSB) +λ
1 + λeSBψ′′(eSB). (7)
The principal’s limited liability constraint (6) can be satisfied at no cost by giving to
the agent all the surplus from his relationship with the principal whatever the agent’s
environmental performance, ySBn = ySBa = Π. The agent’s and the principal’s payoffs are
respectively USB = R(eSB) and V SB = 0.
12 For any e ≥ 0, R(e) ≥ 0 and the agent’s participation constraint is implied by (4). Had the agentowned assets of value l, (4) would have to be replaced by U ≥ R(e) − l. In that case, the participa-tion constraint may be binding for l large enough, meaning that the first-best level of care can still beimplemented at no cost. For intermediate levels of l, both the participation and the limited liabilityconstraints may be simultaneously binding. This leads to a constrained optimum where, despite makingzero profit, the agent no longer exerts the first-best effort. The number of relevant cases in the analysisis thus simplified by our assumption that the agent has no wealth.
13Our model could be easily modified when the cost of effort may be monetary. This alternativeassumption would capture the fact that investments in safety care are a component of the firm’s costswhich is not easily verifiable. The firm’s liability constraint is now za + ya ≥ ψ(e) and (4) becomesU ≥ R(e) = eψ′(e). We have R′(e) > R′(e) and the second-best effort is greater with a monetarydisutility. Intuitively, by reducing the effort, the regulator relaxes now also the firm’s liability constraint.Although expressions differ, insights are similar to those obtained with a non-monetary cost.
9

Under moral hazard, the regulator faces a trade-off between inducing a level of effort
close to the first-best e∗ and giving a socially costly rent R(e∗) to the agent, the only way
of inducing this effort. Reducing the effort below the first-best e∗ reduces this rent.
Implementation: When the private transaction is regulated, the regulator extracts all
the principal’s profit. To this end, the regulator has several possibilities obtained by
combining the payments yn and ya so that, in expectation, the principal’s profit is zero.
One such combination is particularly attractive in view of the analysis of the next section.
When ySBn = ySBa = Π so that V SB = 0, everything happens as if the agent had full
bargaining power in transacting with the principal. Since this private transaction does
not depend on the agent’s environmental performances, it does not perturb the agent’s
incentives and the level of care depends only on the regulatory transfers.
With this implementation, the principal is actually quite passive and does not interfere
with risk management. There is thus a complete dichotomy between the design of the
private transaction and the provision of incentives for safety care to the agent. Since the
principal remains passive, his liability constraint plays no role whatsoever. In addition,
za = −π leaves a rent U = R(eSB)
to the agent.
Corollary 1 Assume that there is only moral hazard on safety care and that the private
transaction is regulated. Increasing the principal’s collectable wealth w has no value.
For further reference, we note that the power of the regulatory scheme in the full
control environment can be defined as :
zSBn − zSBa = ψ′(eSB) = D − λ
1 + λeSBψ′′(eSB) < D.
This incentive power is less than the size of the harm done because effort is distorted down-
wards below the first-best. In the next section, we will see how the power of regulatory
incentives changes when the private transaction is no longer regulated.
4 Non-Observable Private Transaction
In practice, environmental regulators do not have the expertise and the monitoring tech-
nology necessary to audit and control the full set of contracts involving the firm. Regu-
lators can certainly determinate whether a given firm threatens the environment with its
activities. However, they may find hard to ascertain the whole set of stakeholders (sup-
pliers, customers, lenders, etc..) who are bound by contracts with the firm, even though
these transactions may significantly affect the management of environmental risk.
10
In such incomplete regulatory settings, only the agent can be targeted ex ante with
a regulatory scheme. This regulation can be supplemented by an ex post liability rule
which may impose a fine on the principal/agent pair in the event of a damage once the
involvement (be it direct or indirect) of the principal has been proved.14 Of course, if it
is large enough, this fine ends up being paid by the wealthy principal since the agent is
cashless and the payments he gets from contracting may not suffice to pay the fine.
An incomplete regulation might restore some role for the principal’s wealth. The
results below on the benefits of extending liability can thus be interpreted as saying that
an incomplete ex ante regulation supplemented by an ex post liability rule sometimes
achieves what a complete ex ante regulation would have done.
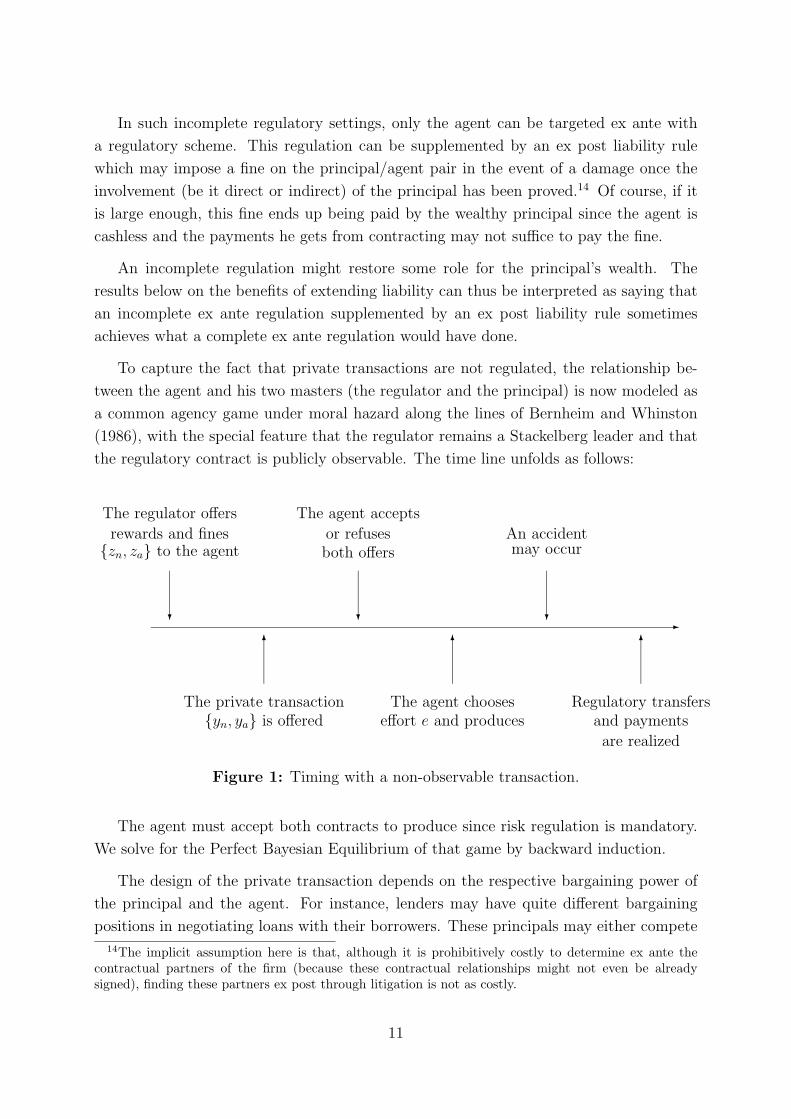
To capture the fact that private transactions are not regulated, the relationship be-
tween the agent and his two masters (the regulator and the principal) is now modeled as
a common agency game under moral hazard along the lines of Bernheim and Whinston
(1986), with the special feature that the regulator remains a Stackelberg leader and that
the regulatory contract is publicly observable. The time line unfolds as follows:
-?
6
?
6
?
6
{zn, za} to the agent
The regulator offers
rewards and fines
The private transaction{yn, ya} is offered
both offersor refuses
The agent accepts
The agent chooseseffort e and produces
may occurAn accident
Regulatory transfersand payments
are realized
Figure 1: Timing with a non-observable transaction.
The agent must accept both contracts to produce since risk regulation is mandatory.
We solve for the Perfect Bayesian Equilibrium of that game by backward induction.
The design of the private transaction depends on the respective bargaining power of
the principal and the agent. For instance, lenders may have quite different bargaining
positions in negotiating loans with their borrowers. These principals may either compete
14The implicit assumption here is that, although it is prohibitively costly to determine ex ante thecontractual partners of the firm (because these contractual relationships might not even be alreadysigned), finding these partners ex post through litigation is not as costly.
11

head-to-head for the right to serve the agent or they may have developed close knitted
customer relationships which give them monopoly power with their clients.15 When the
project is financed by a parent firm which is in a unique relationship with its subsidiary
(maybe because some specific investments have already been sunk in the past), the prin-
cipal might have most of the bargaining power. We capture these different patterns in
the distribution of bargaining power by introducing a parameter α ∈ [0, 1] (resp. 1 − α)
which reflects the weight given to the principal (resp. the agent) at the contracting stage.
Note that the feasible regulatory payments za are necessarily bounded from below as
a result of both the agent’s and the principal’s limited liability constraints. Indeed, these
two liability constraints (respectively Π−ya ≥ −w and ya+za ≥ 0) altogether imply that
the following aggregate liability constraint of the principal/agent pair must hold:16
Π + za ≥ −w. (8)
To have a non-trivial continuation equilibrium of the game, fines should thus be small
enough so that this condition always holds. Intuitively, the maximum fine cannot exceed
the amount collectable from the principal/agent pair, i.e., the value of the transaction
plus the principal’s wealth. By increasing fines if an accident occurs, the regulator may
force the principal to increase the payment to the agent to keep him solvent. However,
doing so is only possible when the principal is himself wealthy enough.
Given that the principal has a bargaining weight α at the contracting stage, the optimal
private transaction solves:
(SPβ) : max{e,U,yn,ya}
(Π + ezn + (1− e)za − ψ(e)− U) + βU
subject to constraints (4) to (6),
where β = 1−αα
is the relative bargaining power of the agent. In solving (SPβ), we will
distinguish between the cases where either the agent (β ≥ 1) or the principal (β < 1) has
most of the bargaining power.
4.1 Dominant Agent
The solution to (SPβ) depends now on how large the fine is.
15See Sharpe (1990) and Rajan (1992) for models of relational banking developing this argument.16Reciprocally, when (8) holds, one can find ya such that both the principal’s and the agent’s liability
constraint hold. ya is then determined by the allocation of bargaining power in private contracting.
12

Lemma 1 Assume that the agent has most of the bargaining power in designing the pri-
vate transaction (β ≥ 1). The optimal transaction is such that the principal’s participation
constraint (6) is binding.
• Small fines: For −za ≤ Π, the effort is efficient from the point of view of the
principal/agent coalition:
zn − za = ψ′(e); (9)
• Large fines: For Π +w ≥ −za > Π, the effort is inefficiently low from the point of
view of the principal/agent coalition. It is uniquely defined by:
Π + za + e(zn − za − ψ′(e)) = 0. (10)
To understand the solution to (SPβ), it is useful to rewrite the principal’s participation
constraint (6) as:
Π + ezn + (1− e)za − ψ(e) ≥ U = R(e) + ya + za. (11)
This feasibility condition simply says that the whole surplus of the principal/agent coali-
tion (on the l.h.s.) must cover the limited liability rent of the agent (on the r.h.s.) plus
all transfers he receives from his two masters in the event of an accident. Constraint (11)
binds at the optimum of (SPβ) as soon as the agent has most of the bargaining power
and pushes therefore the principal down to his reservation value. Moreover, raising za
increases the right-hand side of (11) and hardens this constraint.
Think first of the case of a small fine which is less than Π. Since the agent has
most of the bargaining power, he pockets all that surplus and can thus pay the fine by
himself. This is akin to a regime where only the agent is under the threat of liability. All
the principal’s profit is extracted with a flat contract such that yn = ya = Π, and the
agent’s own limited liability constraint is still satisfied because za + Π > 0. The agent’s
private incentives to exert effort are aligned with those of the principal/agent pair as a
whole. Moral hazard does not affect private contracting. Condition (9) says then that the
marginal cost of effort equals its marginal benefit for the principal/agent coalition. The
effort is efficient from this coalition’s viewpoint.
If the fine −za is too large, this flat contract no longer works. The principal’s wealth is
now needed to pay the fine and we are in a regime of extended liability.17 To break-even,
the principal must then recoup this liability payment by diminishing the payment left to
17One can again use the Equivalence Principle here. Consider simply that the agent pays himself thefine but requests a higher payment ya to avoid bankruptcy.
13

the agent following a good environmental performance. For such a large fine, the agent’s
limited liability creates some perverse incentives since yn < ya. From (3), the agent’s
effort is below its efficient level from this coalition’s viewpoint.
4.2 Dominant Principal
Lemma 2 Assume that the principal has most of the bargaining power in private con-
tracting (β ∈ (0, 1)). The optimal private transaction induces a level of safety care e which
is lower than the efficient level from the principal/agent coalition’s viewpoint:
zn − za = ψ′(e) + (1− β)eψ′′(e). (12)
The agent obtains a rent U = R(e). The principal’s expected utility is:18
V = Π + za + (1− β)e2ψ′′(e) ≥ 0. (13)
Since the agent’s effort is not observed by the principal, the principal must give him a
liability rent to induce some positive effort. However, this rent is costly when β ∈ (0, 1)
and the cost increases as more of the bargaining power goes to the principal.
Condition (12) characterizes an important trade-off. On the one hand, efficiency within
the principal/agent coalition calls for choosing a level of effort such that the marginal
disutility of effort ψ′(e) is equal to the marginal benefit zn − za accruing to the coalition
as a whole. This efficient level of effort would be chosen if care were observable within the
coalition. On the other hand, inducing such a high level of effort requires giving more rent
to the agent. The marginal limited liability rent R′(e) = eψ′′(e) left to the agent adds up to
the marginal disutility of effort to assess the cost of marginally increasing effort within the
coalition. This limited liability term has to be weighted by the relative bargaining power
of the agent. In bilateral monopoly settings where β is close to one, the private transaction
maximizes the overall surplus and its distribution between the principal and the agent is
almost irrelevant. The effort level is then almost efficient. Starting from this benchmark,
the agent’s rent is viewed as more costly within the coalition and effort distortions due to
private contracting are increased as the agent’s bargaining weight decreases.
Using (3) and (12), we immediately get:
yn − ya = −(1− β)eψ′′(e) < 0. (14)
18Condition (13) requires that za cannot be too negative. Otherwise the principal prefers not to signany contract.
14

It could seem quite surprising that the principal reduces the agent’s payment following a
good environmental performance. The private transaction somewhat countervails regu-
latory incentives. Indeed, since some rent has to be left to the agent by a principal who
cannot observe the agent’s effort, the principal offers a marginal contribution yn − ya to
reduce the likelihood of a damage which is less than what it is worth to him. So doing
reduces effort and thus the liability rent of the agent. Since the principal does not value
per se a good environmental performance, the marginal contribution is negative.19
This contract increases the probability of an accident compared with the flat scheme
derived when transactions are regulated. Harmed third-parties could initiate litigation to
denounce this contract as providing incentives for reducing care if this contract was ob-
servable. Those contracts could thus be viewed as being criminal acts. That could trigger
further sanctions for the principal, most noticeably non-pecuniary ones like imprisonment
and the associated reputation loss. However, providing evidences that such a contract is
criminal is not as clear as it appears. Suppose indeed that the principal receives Π + ∆
(where ∆ > 0) in states positively correlated with a bad environmental performance.20
Then, the fact that ya is greater than yn might reflect only the existing incentives for
improving gains from trade. It may be hard to disentangle this incentive effect from the
desire of the principal to dilute regulatory incentives. The private transaction can then
hardly be viewed as being criminal.
In our context, the non-observability of the transaction countervails incentives for care.
The general idea here is that part of the regulatory incentives is diluted when private
transactions remain unregulated. Indeed, because of their common desire to extract the
agent’s liability rent, both the regulator and the principal create a wedge between their
marginal benefit of increasing the agent’s effort and the marginal cost of doing so. When
the principal considers modifying his transaction with the agent to extract his rent, he
does not take into account the impact of his decision on social welfare as a whole but
only on his own profit. Hence, there is a negative externality between both masters of
the firm. This leads to too little effort in equilibrium. Adding up agency costs in each
bilateral relationship in which the agent is involved will exacerbate distortions when both
the agent and the principal are cash-constrained as we will see below.21
19The principal could also suffer from a loss L in the event of an accident. This loss could be due tothe fact that assets are specific and have thus a lower resale value following the agent’s bankruptcy. Itmay also come from the fact that an accident may disrupt the production process and reduce the returnon investment expected by the principal. The results would then be slightly different although similarin spirit. Indeed, (14) would be replaced by yn − ya = L− (1− β)eψ′′(e) < L. The agent may receive agreater payment when there is no accident although the power of incentives of this private transaction isstill less than L, i.e., less than the principal’s valuation for avoiding an accident.
20This may be the case if the agent’s care is a substitute for his cost-reducing effort.21This negative externality reminds of the double marginalization distortions that arises when two
monopolists sell complement goods and do not coordinate their prices (see Tirole (1988, Chapter 4)).
15
4.3 Regulatory Response
Perverse incentives due to private contracting always arise whatever the allocation of
bargaining power. When the agent is dominant, they might come from the principal’s
desire to recoup the liability payment so that he can break even. When the principal is
dominant, those incentives come from his desire to extract liability rent from the agent.
Whatever this allocation, the regulator must undo these countervailing incentives or, at
worst, limit their impact. To show how this can be done, let us move backwards and find
the optimal regulatory scheme. Given the continuation of the game described above, the
regulator’s problem is now:
(R) : max{e,U,V,za,zn}
(1 + λ)(Π− (1− e)D − ψ(e))− λ(U + V )
subject to constraints (4), (8) and either (11) or (13),
where (8) and (11)/(13) are respectively the principal’s limited liability and participation
constraints once the outcome of private contracting is taken into account.22
4.3.1 Dominant Agent
Proposition 2 Assume that the agent has most of the bargaining power (β ≥ 1). The
optimal regulation still implements the second-best outcome with effort eSB and leaves to
the agent and the principal the rents USB = R(eSB) and V SB = 0.
When the transaction cannot be regulated, the regulator faces a double incentive
problem. First, he must induce the correct level of care from the agent, typically the level
found in Proposition 1. Second, he must induce the choice of a private transaction which
has no impact on care. If the agent has most of the bargaining power, the regulator can
easily achieve this outcome. First, remember that the regulator also wants to extract,
even though it is indirectly, the principal’s profit. When he is dominant, the agent is very
well suited to do so on the regulator’s behalf. Provided that the fine is not too large, the
agent remains solvent and his private incentives to exert care are not modified by private
contracting. There is no extra agency cost induced by private contracting. Implementing
a given level of effort costs the same as if the transaction could be regulated.
Implementation: This outcome is easily implemented with the regulatory transfers
zCa = −Π and zCn = −Π + ψ′(eSB). Then, the agent’s extracts all the principal’s rent in
22The principal’s participation constraint takes different expressions depending on whether he is dom-inant or not.
16

each state of nature yCa = yCn = Π. With this scheme, the regulator puts the principal-
agent coalition in the range of small fines. ¿From Lemma 1, moral hazard within the
coalition is then costless. This avoids any extra effort distortion due to private contracting
under moral hazard. The second-best outcome can still be implemented.
4.3.2 Dominant Principal
For future references, we define the third-best level of care eTB as:
D = ψ′(eTB) +λ
1 + λ((3− β)eTBψ′′(eTB) + (1− β)(eTB)2ψ′′′(eTB)), (15)
and the wealth levels w = (1 − β)(eTB)2ψ′′(eTB) and w = (1 − β)(eSB)2ψ′′(eSB). Note
that eTB < eSB and w < w since x2ψ′′(x) is an increasing function of x.
Proposition 3 Assume that the principal has most of the bargaining power (β ∈ (0, 1]).
Three possible regulatory regimes may arise depending on the principal’s wealth.
• Shallow pocket: When w < w, the optimal regulation implements the third-best
level of effort eTB which is strictly less than eSB.
The principal’s limited liability constraint is binding and the principal gets a strictly
positive payoff V TB = (1−β)(eTB)2ψ′′(eTB)−w > 0. The agent gets UTB = R(eTB).
• Intermediate pockets: When w ∈ [w, w], the optimal regulation implements a
constrained level of effort eC defined by:
w = (1− β)(eC)2ψ′′(eC). (16)
The effort eC increases with w and describes the whole interval [eTB, eSB] as w varies
in [w, w].
The principal’s participation and limited liability constraints are both binding and
the principal gets zero expected payoff V C = 0. The agent gets a rent UC = R(eC).
• Deep pockets: When w > w, the optimal regulation implements the second-best
level of effort eSB.
The principal’s limited liability constraint is slack and the principal gets zero expected
payoff. The agent gets a rent USB = R(eSB).
Implementing the second-best outcome is more difficult with a dominant principal
than with a dominant agent. To see that, consider the extreme case where the principal
has in fact all bargaining power (β = 0).
17

If regulatory transfers were directly targeted to the principal, standard moral hazard
theory teaches us that the risk-neutral principal could be made residual claimant for the
impact of any private transaction on the environment.23 As long as it would not violate
the principal’s liability constraint, this implicit delegation of the regulatory authority to
the private sector would be costless.
A first difference between this ideal setting and ours comes from the fact that, when
the transaction is not regulated, only the agent receives regulatory rewards. Following
the logic of the Equivalence Principle, this is only a minor difference since the private
transaction can redistribute transfers between the principal and the agent. An indirect
perfect delegation is therefore still possible when the principal is wealthy enough. To do
so, the regulator must simultaneously align the principal’s incentives to induce effort with
the socially optimal ones and extract (although indirectly through the regulatory scheme
imposed on the agent) his profit. Aligning incentives requires modifying the regulatory
scheme to undo the dilution of incentives which arises under private contracting. The new
regulatory scheme must be sufficiently high-powered so that, despite the countervailing
power of the private transaction, the agent ends up exerting the same second-best effort
as if the transaction was regulated. This requires that the principal bears more risk. In
particular, the fine in the event of an accident increases and the principal may be himself
insolvent if his wealth is small.
When he is cash-constrained, the principal must receive a rent to implement the proper
transaction. This is again socially costly. The regulator must distort incentives to reduce
this extra agency cost. This compounding of agency costs along the principal/agent
hierarchy requires to distort care below its second-best level.
Implementation: For a given bargaining power tilted in favor of the principal, let us
see in more details how the second-best outcome can still be implemented.
First, inducing eSB requires that the new regulatory scheme (zTBn , zTBa ) now offered
by the regulator satisfies:
zTBn − zTBa = D +
(1− β − λ
1 + λ
)eSBψ′′(eSB) > zSBn − zSBa . (17)
Indeed, taking into account the countervailing incentives as defined in (14), private con-
tracting induces the agent to choose an effort level which satisfies:
ψ′(e) + (1− β)eψ′′(e) = zTBn − zTBa . (18)
This equation admits a unique solution e = eSB.
Since part of the incentives are dissipated through private contracting, the socially
optimal level of care eSB can only be obtained if the regulatory scheme is higher powered23See Laffont and Martimort (2002, Chapter 4) for instance.
18

than when transactions are observable. The incentive power zTBn − zTBa may now exceed
D (at least when β is small) and the optimal policy then relies on punitive fines.24
Second, to extract the whole principal’s expected benefit from contracting, the regu-
lator must set rewards and fines so that:
V = Π + zTBa + eSB(zTBn − zTBa − ψ′(eSB)) = 0. (19)
Solving the system (17) and (19) gives the values zTBn and zTBa used by the regulator to
implicitly and costlessly delegate regulatory authority to the principal. Those expressions
show that the fine −zTBa has to be sufficiently large to do so. Such a fine will conflict with
the aggregate limited liability constraint (8) when the principal is not wealthy enough.
We also see on (17) that the incentive power of the regulatory contract(zTBn , zTBa
)increases as 1− β increases or as λ decreases. Punitive fines are less attractive when the
principal’s bargaining power diminishes because the countervailing power of the private
transaction itself diminishes. Also, when the social cost of the agent’s rent is small enough
and eSB is close to the first-best e∗, the regulation must be more punitive to undo the
significant dilution of incentives coming from the private transaction.
The above analysis shows the practical importance of imposing cash requirements
on stakeholders contracting with the firm. In practice, regulatory policies have often
similar features. For instance, various rules are imposed on stakeholders to demonstrate
financial responsibility. This has been the case for RCRA since an amendment passed in
1984 imposed that underground storage tank owners hold liabilities or purchase liability
insurance from third-parties to compensate victims in an amount up to 1 million US
dollars. As shown in our analysis, this kind of policies guarantees that the owner/operator
hierarchy fully internalizes the costs of storage tank hazards so that an efficient level
of prevention is performed even in the case of an incomplete environmental regulation.
Finally, the compensations for the victims of oil spills come from an international fund25
financed by oil companies upon request of the member States. The decisions of these
States to increase the required contributions of oil companies following the Prestige 2002
accident has often been viewed as providing incentives to these companies for better
delegating oil transport to the safer shippers.
4.4 A Useful Analogy
Consider the case where the principal has all bargaining power. To understand how the
liability rents of the agent and the principal compound, it is useful to see their coalition24According to Shavell (2004), “it is conventional to refer to damages that are greater than losses as
punitive”.25The International Oil Pollution Compensation Funds.
19

as a merged agent who, once the agency problem within the coalition is already solved,
behaves as having a virtual utility function given by:
Π + za + e(zn − za)− ψ(e)−R(e).
In terms of its safety care choice, this coalition has a virtual disutility of effort φ(e) =
ψ(e) + R(e) = eψ′(e). The corresponding virtual liability rent that must be given up by
the regulator to this coalition to induce an effort e is thus:
R(e) = eφ′(e)− φ(e) = e2ψ′′(e).
This virtual liability rent is precisely the rent that must be taken from the principal to
be sure that it is costless to delegate regulatory authority to the private sector. The
principal must be able to post ex ante a bond equal to this virtual rent for a costless
delegation of the regulatory authority to take place. If the principal cannot post such a
bond, distortions arise.
Recasting the results of Propositions 2 and 3: when w ≥ w = R(eSB), the principal
is wealthy enough to post this bond; when w > w > R(eTB) = w, we have a constrained
regime where effort is distorted but positively linked to the principal’s wealth w; lastly,
when w ≤ w, a liability rent must be given up to the principal.
4.5 Bargaining Power and Liability
We investigate now the relationship between the principal’s wealth needed to achieve the
second-best outcome even under an incomplete regulation and the allocation of bargaining
power. We already know from Proposition 3 that, for a given allocation, there is a positive
relationship between the principal’s wealth and the level of care. When the principal has
most of the bargaining power but is cash-constrained, an increase in the amount collectable
for damages relaxes his binding liability constraint and improves strictly welfare. This
better aligns the principal’s private incentives to induce care with the socially optimal
ones. It also strictly increases the level of care when w lies in the interval [w, w] since
effort is positively linked to the available wealth when the principal has an “intermediate”
pocket. In this case, full extraction of the principal’s rent is still possible, but obtained
at the cost of decreasing the effort below the second-best level.
Let us now fix the principal’s wealth and vary his bargaining power within the coalition.
Corollary 2 There exists β∗(w) = max{0, 1 − w(eSB)2ψ′′(eSB)
} < 1 such that, for β ≥β∗(w), the second-best regulation can be implemented even under an incomplete regulation.
Extending the principal’s liability by raising w has no value.
20

By increasing the principal’s wealth collectable for damages, one weakens the princi-
pal’s bargaining position vis a vis the agent. Indeed, even when the principal is dominant,
the regulator can raise fines up to the point where the principal has to leave most of the
surplus from the transaction to avoid the agent’s bankruptcy; exactly as if the principal
had less bargaining power. The principal’s liability can thus be viewed as a substitute for
his own bargaining power.26
As λ diminishes, eSB increases towards the first-best level e∗ and thus β∗(w) also
increases. When the social cost of the rent diminishes, the punitive content of regulatory
schemes must increase since the countervailing power of the private transaction is more
significant, as it can be seen from the r.h.s. of (14) which decreases with e. For a given
allocation of bargaining power, it becomes more valuable to increase the collectable wealth
to raise welfare.
¿From a policy perspective, it is important to stress a few cases where extended liability
may certainly be beneficial. Financiers who have developed a unique relationship with
firms are the best targets for that policy. Also, extended liability may be particularly
useful in transportation where agents are highly competitive.
5 Extensions
5.1 Affiliated Principals
On top of the polar cases where principals are fully competitive and where they hold a
monopoly position vis-a-vis their agent, there is a whole range of possible organizational
structures where a single agent deals in fact with several principals without having bar-
gaining power with any of them. Boyd and Ingberman (2001) coined the expression of
affiliated principals to characterize such settings. For instance, one may think of those
principals as n (n ≥ 2) different lenders bringing each a fraction In
of the overall invest-
ment of the firm. Those principals could also be n polluting contractors affiliated via the
firm which disposes or transports pollutants on their behalf.
Although such settings seem at first glance akin to a reduction of each principal’s bar-
gaining power vis-a-vis the agent, one has to be cautious in generalizing the predictions of
the one-principal model. Indeed, implementing the second-best outcome with an incom-
plete regulation cum liability rules requires now to make each of these principals residual
26Note that extending the principal’s liability may still be irrelevant when the principal has most ofthe bargaining power but the distribution of bargaining power is quite even (β close to 1 from below).The principal’s liability constraint is then automatically satisfied when his participation constraint holds.Also, when the principal’s bargaining power is small enough, extending liability is irrelevant since thesecond-best outcome can already be achieved by regulating only the agent.
21

claimant for the harm done. Far from facilitating this implementation, the presence of
multiple stakeholders makes it more difficult. We characterize below the bound on the
principals’ aggregate wealth which is now needed to implement the second-best outcome
and show that it increases with the number of principals.
To make things simpler, we assume that principals are symmetric. Each pockets Πn
of
the gains from trade and holds assets worth wn
.27
Let us denote by (yin, yia) the contract offered by principal i (i ∈ {1, .., n}). The agent’s
incentive constraint can now be written as:
zn +n∑i=1
yin − (za +n∑i=1
yia) = ψ′(e); (20)
and his limited liability constraint as:
za +n∑i=1
yia ≥ 0. (21)
For a given regulatory scheme, the Nash equilibrium in contracts among the n non-
cooperating principals leads to an effort level given by:28
zn − za = ψ′(e) + neψ′′(e). (22)
In this non-cooperative setting, a given principal does not take into account the impact of
his own desire to reduce the rent of the agent on the surplus of the bilateral relationships
involving this agent with other principals. Each principal individually countervails the
regulatory incentives and sets a negative marginal reward:
yin − yia = −eψ′′(e) < 0. (23)
Just like in the single principal case, each principal chooses a bilateral contract with
the agent with an incentive power which is his own marginal valuation for the agent’s
effort (here again zero because principals do not care directly about a damage) minus
the marginal cost of the agent’s rent. As those distortions add up in a non-cooperative
equilibrium, there is an excessive reduction of the agent’s rent. The agent’s effort ends
up being significantly downward distorted below the effort that would be obtained had
principals jointly designed his incentives. There is free-riding among the principals over
27Boyd and Ingberman (2001) argue that, because liability on affiliated contractors is joint and several,asymmetric principals will not be affiliated altogether. According to these authors, the threat thatwealthy principals have to subsidize shallow-pocket ones in the event of a damage makes them separatefrom each other, so that affiliated structures should form with principals having comparable wealth.
28See the Appendix for details. For simplicity, we assume that the n principals are needed so that wemodel a game of intrinsic common agency. This is for instance the case if each principal is a lender whofaces a capacity constraint and can only finance a fraction 1
n of the project.
22

the provision of incentives to the agent. Affiliation of the principals thus worsens the
countervailing effect of private transactions on regulatory incentives.
Let us assume that liability is joint and several29 so that symmetric principals end up
sharing equally fines in the event of an accident. Each principal gets a profit worth:
V =Π + zan
+ e2ψ′′(e) ≥ 0. (24)
Without embarking on a full-fledged analysis similar to Section 4, let us determine
the conditions under which delegation of the regulatory authority to the private sector is
costless and what happens when, instead, the liability constraint of each principal binds.
To implement the second-best outcome eSB, the regulator must now undo the severe
dilution of incentives that results from the principals’ non-cooperative behavior. This can
be done by offering a very high-powered regulatory scheme (zMn , zMa ) such that:30
zMn − zMa = D +
(n− λ
1 + λ
)eSBψ′′(eSB) > zTBn − zTBa . (25)
The regulatory policy is more punitive with affiliated principals than with a single stake-
holder and the punitive content increases with the number of principals involved.
To extract each principal’s profit without hitting his liability constraint, we must have:
−zMa = Π + n(eSB)2ψ′′(eSB) < Π + w. (26)
This r.h.s inequality is more stringent as n increases. It is more difficult to ensure cost-
less delegation of the regulatory authority as more principals contract with the agent.
Intuitively, a costless delegation requires now that each principal posts a bond equal to
the rent withdrawn from contracting independently with the agent. This bond is ex-
actly the virtual rent obtained by the merged entity that this principal forms with the
agent. With multiple principals, those rents add up and make it more difficult to sat-
isfy the aggregate liability constraint of the principals. The minimal aggregate wealth
w(n) = n(eSB)2ψ′′(eSB) above which delegation is costless increases linearly with n.
Let us now turn to the polar case where the limited liability constraint of each principal
is binding. To induce an effort e, each principal must now get a rent worth:
V = e2ψ′′(e)− w
n> 0. (27)
Using symmetry, the regulator’s problem becomes:
(RM) : max{e,U,V }
(1 + λ)(Π− (1− e)D − ψ(e))− λ(U + nV )
29One of the principals is then held liable for the whole damage caused by the agent and threatens then− 1 others with litigation to share equally the financial burden.
30Where the superscript M is meant for multiple principals.
23

subject to constraints (4) and (27).
The optimal effort level eM in this environment with affiliated principals becomes:
D = ψ′(eM) +λ
1 + λ((2n+ 1)eMψ′′(eM) + n(eM)2ψ′′′(eM)). (28)
Taking for instance the case where ψ(e) = e2
2and making the dependence of eM on n
explicit, we observe that eM(n) decreases with n due to free-riding among principals in
providing incentives to the agent. The liability constraint of each principal is now binding
when:
w < w(n) = n(eM(n))2 =nD2(
1 + λ1+λ
(2n+ 1))2 . (29)
It is easy to check that w(n) is inversely U-shaped in n. There are two effects at work
here. First, as we saw above, the aggregate wealth of the principals must be lower than
n times the rent obtained by each of them from his relationship with the agent in order
to create a liability problem. This first effect tends to increase the bound w(n). Second,
as more principals get involved, the equilibrium effort of the agent diminishes because
of free-riding and the rent that each principal gets from his relationship with the agent
decreases. This makes it somewhat harder to satisfy (29) so that principals are less likely
to have a shallow pocket. This second effect dominates for n large enough. As a result of
those two effects, w(n) achieves its maximum at n = 3 when the cost of public funds λ is
close to .3, a value commonly accepted. Principals find it easier to be shallow-pocketed
and thus to earn a positive liability rent in affiliated structures involving such a small
number of principals. Exactly as principals may reduce the size of their collectable wealth
to escape liability payments and earn a liability rent, they may also choose to be affiliated
with only a few other principals.31
5.2 Ban on Regulatory Rewards
In the U.S., the statutory ability of environmental agencies for using transfers with regu-
lated firms (both at the Federal and at the State levels) is often more limited than assumed
so far. Although fines are feasible, financial rewards for good environmental performances
may not always be authorized.32 This extra incompleteness of the regulatory scheme puts
certainly some constraints on the delegation of regulatory objectives to the private sector.
Sticking to this real world institutional setting amounts to forcing zn = 0.
31For w ∈ [w(n), w(n)], the effort level is constrained by the principals’ limited wealth. The constrainedeffort level eC(n) decreases with n and solves now neC(n)ψ′′(eC(n)) = w. For those principals withintermediate pockets, raising their collectable wealth increases again welfare and effort.
32However, indirect rewards from good environmental performances can still be present as we arguedwhile presenting the model in Section 2.
24

Let us first consider the case of a dominant agent which has attracted much of the
attention in the literature.33 First, it may be that Π ≥ ψ′(eSB) if the second-best effort
eSB is sufficiently distorted below the first-best e∗ even if the level of harm D is much
greater than Π.34 There is a simple way for the regulator to implement the second-best
level of effort eSB even in the absence of rewards. Suppose that the regulator imposes
a fine −zSBa = ψ′(eSB). The agent having all bargaining power offers a flat contract to
the principal ya = yn = Π which extracts all surplus from the transaction and does not
perturb incentives. The surplus pocketed by the agent is enough to cover the fine and the
agent chooses the second-best level of effort.
Suppose now that Π < ψ′(eSB). By choosing the fine −zWa = Π, the regulator can
implement a level of effort eW such that Π = ψ′(eW ). Note that eW < eSB so that, by
concavity of welfare in e, raising effort above eW would improve welfare. Can the regulator
improve on this outcome? Raising the fine may a priori foster care but it requires also
using the principal’s wealth and this introduces countervailing incentives. From Lemma
1, the effort level is indeed given by the principal’s zero profit condition. This condition
can be rewritten taking into account the ban on rewards as:
Π + (1− e)za − eψ′(e) = 0. (30)
This expression defines the fine as a function of the effort level implemented −za =
H(e) = Π−eψ′(e)1−e . Differentiating with respect to e, we find H ′(e) = Π−ψ′(e)−e(1−e)ψ′(e)
(1−e)2 and
thus H ′(eW ) < 0. Therefore, raising the fine above Π decreases the effort level below eW
and reduces also welfare. We recover here Pitchford (1995)’s result that extended liability
may be costly when the principal has no bargaining power. His result extends thus to the
second-best environment considered in our paper.
Consider now the case of a dominant principal and for simplicity assume that he has
all bargaining power (β = 0). Taking into account the ban on rewards and using Lemma
2, the effort satisfies:
−za = ψ′(e) + eψ′′(e). (31)
Using (1) and setting zn = 0, the regulator’s problem can now be written as:
(RL) : max{e,za}
Π− ψ(e)− (1 + λ)(1− e)D − λza(1− e)
subject to constraints (8), (13) and (31).
33See Pitchford (1995, 2001) and Lewis and Sappington (2001a) for instance.34Even if the cost of public funds λ is close to zero, a very convex disutility of effort (ψ′′(·) large) is
enough to guarantee that this case is relevant. This case never arises in the analysis of Pitchford (1995)because the second-best level of effort remains equal to the first-best when λ = 0.
25

The fine −za plays now two roles at the same time: first, inducing effort and, second,
shifting rents away from the private sector since those rents are costly when λ > 0.
When Π and w are small enough, the optimal effort eW is obtained by using (31) and
binding (8):
Π + w = ψ′(eW ) + eWψ′′(eW ). (32)
Raising the principal’s liability w increases the level of care and improves welfare.
6 Conclusion
Extending liability towards principals linked through contracts with an agent involved
in environmentally risky activities may improve welfare when private contracts cannot
be regulated. Even with such incomplete regulation, the management of environmental
risk can in fact be indirectly delegated to the private sector but it requires increasing
fines and rewards. This is of course easier when part of these large ex post fines are
paid by principals. Otherwise, the optimal regulation may take into account an extra
agency cost of delegation and calls for strong distortions in the level of precautionary care
undertaken by the agent. Increasing the wealth of principals that can be collected helps
thus improving this implicit delegation and moves the level of care towards the second-
best level. This result holds under a broad range of possible values of the principal’s
bargaining power but also for more complex organizations involving multiple principals
jointly contracting with the agent or when regulatory rewards are banned.
The fact that rewards and fines are increased under an incomplete regulation gives
significant discretionary power to regulators and thus increases the scope for capture.35
One possible response to this threat of capture is to limit the regulator’s discretion by
reducing either punishments or rewards. In the first case, extending liability may then be
less attractive. In the second case, banning rewards in the event of good environmental
performances still leaves some scope for extending liability as shown above. A second
possible response to the threat of capture is to separate ex ante regulation from ex post
litigation. In our model, the two aspects of risk control have been merged and viewed
as a single incentive contract offered by a merged entity. Hiriart, Martimort and Pouyet
(2005a) give a more active role to regulators and judges by allowing them to monitor care
either ex ante or ex post. They show that splitting these monitoring tasks helps reducing
the threat of capture.
35It is indeed well known that high-powered incentive schemes may be particularly prone to regulatorycapture. See Laffont and Tirole (1993, Chapter 11). On this issue of capture, see Boyer and Porrini(2004) who compare a captured regulation with an uncorruptible liability regime.
26

Another assumption that should be relaxed is the fact that the regulator knows the size
of the principals’ wealth. Because principals may hide assets in various ways, asymmetric
information on wealth may arise. The implicit delegation of regulatory authority to the
private sector becomes more difficult because it is not known whether principals have
enough assets to manage risk efficiently.36 To the agency costs of moral hazard, one must
now add also the rent that wealthy principals may withdraw from their assets hiding.
This may tighten the bound on wealth above which the implicit delegation of regulatory
authority to the private sector is costless and make extended liability less attractive. On
the other hand, asymmetric information on wealth requires to develop a whole legal arsenal
to unveil assets. Extending liability through a legal procedure may be quite attractive in
this respect.37
It would also be worth introducing into our framework a substitutability between care
and cost minimizing effort.38 Increasing care raises cost and reduces thereby the gains
from trade with the principal. This countervailing effect might certainly influence the
kind of contracts signed with principals. Principals may want to write contracts which
induce even more countervailing incentives for the agent compared to our setting which
does not include such substitutability in efforts. This effect should reinforce our previous
findings. When principals have most of the bargaining power, the regulator should design
an ex ante regulatory contract with even higher-powered incentives. Indeed, the regulator
must now undo not only the desire of principals to extract the firm’s liability rent but
also their desire to divert the firm’s effort towards more productive activities. These are
issues that we plan to explore in future works.
References
Bernheim, D. and M. Whinston, 1986, “Common Agency,” Econometrica, 54: 923-
42.
Balkenborg, D., 2001, “How Liable Should the Lender Be? The Case of judgment-
Proof Firms and Environmental Risks: Comment,” American Economic Review,
91: 731-738.
Boyd, J., 2001, “Financial Responsability for Environmental Obligations: Are Bonding
and Assurance Rules Fulfilling Their Promise?” Dicussion Paper 01-42 Resources
for the Future.
36For moral hazard models where liabilities are also private information, see Lewis and Sappington(2000 and 2001b).
37See Hiriart, Martimort and Pouyet (2005b).38Dionne and Spaeter (2003) and Laffont (1995) analyze such settings.
27
Boyd, J. and D. Ingberman, 1997, “The Search for Deep Pockets: Is “Extended Li-
ability” Expensive Liability?” Journal of Law, Economics and Organization, 13:
232-258.
Boyd, J. and D. Ingberman, 2001, “The Vertical Extension of Environmental Liabil-
ity through Chains of Ownership, Contract and Supply,” in A. Heyes ed. The Law
and Economics of the Environment, 44-70. Edward Elgar.
Boyer, M. and J.J. Laffont, 1996, “Environmental Protection, Producer Insolvency
and Lender Liability,” in A. Xepapadeas ed. Economic Policy for the Environment
and Natural Resources, 1-29. Edward Elgar.
Boyer, M. and J.J. Laffont, 1997, “Environmental Risk and Bank Liability,” Euro-
pean Economic Review, 41: 1427-1459.
Boyer, M. and D. Porrini, 2004, “Modelling the Choice Between Regulation and Li-
ability in Terms of Social Welfare,” Canadian Journal of Economics, 37: 590-612.
Dionne, G. and S. Spaeter, 2003, “Environmental Risks and Extended Liability: The
Case of Green Technologies,” Journal of Public Economics, 87: 1025-1060.
Faure, M. and G. Skogh, 2003, The Economic analysis of Environmental Policy and
Law, Edward Elgar Publishing.
Heyes, A., 1996, “Lender Penalty for Environmental Damage and the Equilibrium Cost
of Capital,” Economica, 63: 311-323.
Hiriart, Y., D. Martimort and J. Pouyet, 2005a, “The Public Management of Risk:
Separating Ex Ante and Ex Post Monitors,” mimeo IDEI.
Hiriart, Y., D. Martimort and J. Pouyet, 2005b, “The Regulator and the Judge:
Complements or Substitutes in the Control of Risky Activities,” mimeo IDEI.
Laffont, J.J., 1995, “Regulation, Moral Hazard and Insurance of Environmental Risks,”
Journal of Public Economics, 58: 319-336.
Laffont, J.J., and D. Martimort, 2002, The Theory of Incentives: The Principal-
Agent Model, Princeton University Press.
Laffont, J.J., and J. Tirole, 1993, A Theory of Incentives in Procurement and Regu-
lation, The MIT Press.
Lesourd, J.B., and G. Schilizzi, 2001, The Environment in Corporate Management,
Edward Elgar.
28
Lewis, T., and D. Sappington, 2000, “Contracting Wealth-Constrained Agents,” In-
ternational Economic Review, 41: 743-767.
Lewis, T., and D. Sappington, 2001a, “How Liable Should the Lender Be? The Case
of Judgment-Proof Firms and Environmental Risks: Comment,” American Eco-
nomic Review, 91: 724-730.
Lewis, T., and D. Sappington, 2001b, “Optimal Contracting with Private Knowledge
of Wealth and Ability,” Review of Economic Studies, 68: 21-45.
Newman, H., and D. Wright 1990, “Strict Liability in a Principal-Agent Model,” In-
ternational Review of Law and Economics, 10: 219-231.
Pitchford, R., 1995, “How Liable Should the Lender Be? The Case of judgment-Proof
Firms and Environmental Risks,” American Economic Review, 85: 1171-1186.
Pitchford, R., 2001, “How Liable Should a Lender be? The Case of Judgment-Proof
Firms and Environmental Risks: Reply,” American Economic Review, 91: 739-745.
Rajan, R., 1992, “Insiders and Outsiders:The Choice Between Informed and Arm’s
Length Debt,” Journal of Finance, 47: 1367-1400.
Ringleb, A. and S. Wiggins, 1990, “Liability and Large Scale, Long-Term Hazards,”
Journal of Political Economy, 98: 574-595.
Sharpe, S., 1990, “Asymmetric Information, Bank Lending and Implicit Contracts: A
Stylized Model of Customer Relationship,” Journal of Finance, 45: 1069-1087.
Shavell, S., 2004, Foundations of Economic Analysis of Law, Harvard University Press.
Segerson, K. and T. Tietenberg, 1992, “The Structure of Penalties in Environmental
Enforcement: An Economic Analysis,” Journal of Environmental Economics and
Management, 23: 179-200.
Strasser, K. and D. Rodosevich, 1993, “Seeing the Forest for the Trees in CERCLA
Liability,” Yale Journal on Regulation, 10: 493-560.
Tirole, J., 1988, The Theory of Industrial Organization, MIT Press.
Appendices
• Proof of Proposition 1: The proof is straightforward: we first find the optimal effort
neglecting constraint (6) and then, we check that there exists values of (yn, ya) which
satisfy (6).
29

First step. The regulator wants to reduce U and V as much as possible since λ > 0.
Both (4) and (5) are thus binding. Inserting U = R(e) into the objective function which
becomes a strictly concave function of e and optimizing, we find (7).
Second step. To satisfy (6), one possibility (among others) is to set ySBn = ySBa = Π.
With those values, the moral hazard constraint (3) becomes:
zSBn − zSBa = ψ′(eSB) = D − λ
1 + λeSBψ′′(eSB) < D.
With the agent’s limited liability constraint ya + za ≥ 0 being binding, we finally obtain
zSBa = −ySBa = −Π and all transfers are defined.
• Proof of Corollary 1: Direct from the text.
• Proof of Lemma 1: First, we observe that (11) must be binding at the optimum when
the agent is dominant. This can be done by raising ya as long as (6) is satisfied, i.e., as
long as ya ≤ Π + w.
Two cases must be distinguished depending on whether the effort e which maximizes
the complete information total payoff of the coalition (such that ψ′(e) = zn− za), satisfies
(11) or not. This is the case when for this value of e:
Π + za + e(zn − za)− ψ(e) ≥ R(e) + ya + za,
or Π − ya ≥ 0. Of course, since the agent has most of the bargaining power, he chooses
ya = Π. Given that ya+za ≥ 0 must be satisfied, this case can only occur when −za ≤ Π,
i.e., for small fines.
When Π < −za ≤ Π + w, we are in the case of strong fines, the effort solution to
(SPα) is no longer interior and efficient, and is constrained by equation (11). Of course,
za must not be too negative otherwise the constrained set defined by (11) is empty. This
is ensured when
Π + za + e2∞ψ
′′(e∞) ≥ 0,
where e∞ is defined implicitly as
zn − za = ψ′(e∞) + e∞ψ′′(e∞).
Note that the regulator should not choose zn and za such that the constrained set of
(SPβ) is empty since then the market for private transactions would break down. When
the constrained set is non-empty, the optimal effort is obtained when ya + za = 0 and we
find that it solves (10). Note that zn − za = ψ′(e) − Π+zae
> ψ′(e). Hence the effort no
longer maximizes the complete information aggregrate payoff of the coalition.
30

• Proof of Lemma 2: We neglect (5) and (6) which will be satisfied with a convenient
choice of zn and za by the regulator. Of course, (4) must be binding since the agent’s
limited liability rent is privately costly for the principal. Hence, ya + za = 0. Inserting
U = R(e) into the principal’s objective which becomes strictly concave in e, we obtain
the first-order condition (12).
• Proof of Proposition 2: It is obvious to check that yn = ya = Π = −za maximizes
the agent’s expected utility, extracts the principal’s rent, and induces an effort e such that
ψ′(e) = zn − za. For zCn and zCa proposed in the text, eSB is chosen.
• Proof of Proposition 3: Let us first find the regime where only (8) is binding. Then,
V = (1 − β)e2ψ′′(e) − w and inserting this value into the regulator’s objective function
along with the other binding constraint (4) yields an objective function which is strictly
concave in e:
(1 + λ)(Π−D(1− e)− ψ(e))− λ(R(e) + (1− β)e2ψ′′(e)− w).
Optimizing with respect to e yields (15). This regime occurs as long as w < w.
Let us assume, on the contrary, that (13) is binding and (8) is slack. Then, since (4)
remains binding, the objective function of the regulator becomes:
(1 + λ)(Π−D(1− e)− ψ(e))− λR(e),
which is maximized for eSB. Since (e2ψ′′(e))′ > 0, it is straightforward to check that
eTB < eSB. This regime occurs as long as w > w.
Finally, for w ≥ w ≥ w, both (8) and (13) are binding and w = (1− β)e2ψ′′(e). As w
increases, the optimal effort describes the whole interval [eTB, eSB].
• Proof of Corollary 2: Direct from the text.
• Nash Equilibrium Among Principals: From (20), we get
U ≥ za +n∑j=1
yja +R(e) ≥ R(e), (33)
where the inequality follows from (21).
At a best response, principal i wants to solve:
(SP i) : max{e,U,}
Π + e
(zn +
∑j 6=i
yjn
)+ (1− e)
(za +
∑j 6=i
yja
)− ψ(e)− U
subject to (33).
31

The constraint is binding and thus, principal i wants to induce an effort level i such that
zn +∑j 6=i
yjn −
(za +
∑j 6=i
yja
)= ψ′(e) + eψ′′(e). (34)
Summing those equations for all i and taking into account (20) yields then (22). Finally,
using again (34), we get (23).
32





























