Embed Size (px)
Citation preview

InternationalJournalof ComputerVision,Vol. no.??,IssueNo. ??,1??(1999)c�
1999Kluwer AcademicPublishers,Boston.Manufacturedin TheNetherlands.
The Bas-Relief Ambiguity
PETERN. BELHUMEURCenterfor Comp.VisionandControl, Dept.of ElectricalEngineering, Yale University, New HavenCT06520
DAVID J.KRIEGMANBeckmanInstitute, Universityof Illinois, Urbana-Champaign,Urbana,IL 61801
ALAN L. YUILLESmith-Kettlewell EyeResearch Institute, SanFrancisco,CA 94115
ReceivedNovember17,1997;RevisedNovember20,1998
Abstract. Whenanunknown objectwith Lambertianreflectanceis viewedorthographically, thereis animplicitambiguityin determiningits 3-d structure:we show that the object’s visible surface ��������� is indistinguishablefrom a “generalizedbas-relief” transformationof the object’s geometry, �� ���������������������������������� , andacorrespondingtransformationon the object’s albedo. For eachimageof the object illuminatedby an arbitrarynumberof distantlight sources,thereexistsanidenticalimageof thetransformedobjectilluminatedby similarlytransformedlight sources. This result holds both for the illuminated regionsof the object as well as thoseincastandattachedshadows. Furthermore,neithersmall motion of the object,nor of the viewer will resolve theambiguity in determiningthe flattening(or scaling) � of the object’s surface. Implicationsof this ambiguityonstructurerecoveryandshaperepresentationarediscussed.
Keywords: VariableIllumination,Shadows,ShapeAmbiguity, ObjectRepresentation,ObjectRecognition
1. Introduction
Sinceantiquity, artisanshave createdflattenedforms,i.e., so-called“bas-reliefs,” which whenviewed froma particularvantagepoint aredifficult, if not impos-sible, to distinguishfrom full reliefs. SeeFigure 1.As the sun moves throughthe sky, the shadingandshadowschange,yet thedegreeof flatteningcannotbediscernedon well sculptedbas-reliefs.Evenif anob-server’sheadmovesby asmallamount,thisambiguitycannotberesolved.Thispaperdoesnotsimplypresentanexplanationfor theeffectivenessof relief sculpture,but demonstratesthat the ambiguity is implicit in re-coveringthestructureof any object.
Considerthesetof imagesproducedby viewing anobject from a fixed viewpoint, but underall possible
combinationsof distantlight sources.An ambiguityindeterminingthe object’s structurearisesif thereexistotherobjectsthatdiffer in shapeyetproducethesamesetof images.We show thatthereexistsa wholefam-ily of transformations,termed“generalizedbas-relieftransformations,” for which this is true.
A generalized bas-relief (GBR) transformationchangesboththesurfaceshapeandalbedopattern.Inparticular, if ������� denotesthecoordinatesof pointsinanimageplane,and !�"���������� denotesthedistancefrom an object’s surfaceto the imageplane,a gener-alizedbas-relieftransformationof thesurfaceshapeisgivenby ����������#�$�����������%�&���!�'��� with �)(+* ,andthecorrespondinggeneralizedbas-relieftransfor-mationof thesurfacealbedois givenby Eq.3. Relief

2 Belhumeur, Kriegman,andYuille
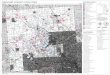
Fig. 1. Frontal and side views of a pair of marblebas-reliefsculptures:Notice how the frontal views appearto have full3-dimensionaldepth,while the sideviews reveal the flattening– thesculpturesrise only 5 centimetersfrom the backgroundplane.While subtleshadingis apparentonthefaces,theshadows onthewomen’s pleatsarethedominantperceptualcuein thebody.
sculpturesareconstructedusinga subsetof thetrans-formationon shapewith *-,$�&,/. and �'�0�-�1*but without – to the bestof our knowledge– thecor-respondingtransformationonalbedo.Bas-reliefs(lowreliefs)areusuallydefinedashaving ��,'*�243 .
Yet the subtletiesof the bas-reliefambiguity mayhave eludedRenaissanceartists. Leonardoda Vinci,while comparingpaintingandsculpture,criticizedtherealismaffordedby reliefs[15]:
As faraslight andshadeareconcernedlow relieffails both as sculptureand as painting, becausethe shadows correspondto the low natureof therelief, asfor examplein theshadowsof foreshort-enedobjects,which will not exhibit thedepthofthosein paintingor in sculpturein theround.
It is true that – when illuminatedby the samelightsource– a relief surface( �-,5. ) anda surface“in theround” ( ���$. ) will castdifferentshadows. However,Leonardo’scommentappearsto overlookthefactthatfor any classicalbas-relieftransformationof the sur-face, there is a correspondingtransformationof thelight sourcedirection suchthat the shadows are thesame.This is not restrictedto classicalreliefsbut, aswewill show, appliesequallyto thegreatersetof gen-eralizedbas-relieftransformations.
Thefact thatanobjectandevery GBR transforma-tion of the object producethe sameshadow regionsarisesfrom an implicit duality. For eachimage ofa Lambertian[20, 11] surface � viewed underortho-graphicprojection(parallellinesof sight)andillumi-natedby a distantlight source6 (e.g.,the sun),there
exists an identical image of a GBR surface �� withtransformedalbedoproducedby a transformedlightsource �6 . This equalityholdsnot only for the shad-owedregionsof thesurfaces,but for theshadingin theilluminatedregionsaswell. Furthermore,dueto su-perposition,theequalityholdsfor anarbitrary– possi-bly infinite – numberof light sources.It will beshownin theAppendixthatfor objectswith convex shapethegeneralizedbas-relieftransformationis theonly trans-formationwith this property:noothersuchambiguityexists.
Thus,from a singleviewpoint, thereis anambigu-ity in determiningthe 3-d Euclideangeometryof asurface: one can – at best– determinethe relief ofthe surfaceup to a threeparameterfamily of lineartransformations.No informationin eithertheshadow-ing or shadingof the surfacecanresolve this. Yet, iftheviewermovesrelativeto thesurface,or thesurfacemovesrelative to theviewer, canthis ambiguitybere-solved?
As discussedby Helmholtz [32], image changesproducedby an observer’s motion reveal both thedepthandshapeof viewedobjects.For anobjectun-dergoing rigid motion and viewed underperspectiveprojection,theobject’sEuclideanstructurecanbede-terminedfrom asfew astwo images[22, 25, 33]. Ifthe object is viewed orthographicallyin two images,its structurecanonly berecoveredup to a oneparam-eterfamily of affinedistortions[13]. For infinitesimalmotion underorthographicprojection,thereis a gen-uinebas-reliefambiguity:theshapeof thesurfacecanonly berecoveredup to a scalefactorin thedirectionof thecamera’s opticalaxis, i.e., a classicalbas-relieftransformationfor which � is unknown [17].

TheBas-ReliefAmbiguity 3
Fig. 2. Three-dimensionaldatafor thehumanhead(top row) wasobtainedusinga laserscan(Cyberware)andrenderedasaLambertiansurfacewith constantalbedo(equalgrey valuesfor all surfacepoints). The subsequentthreerows show imagesof headswhoseshapeshave beentransformedby differentgeneralizedbas-relieftransformations,but whosealbedoshave notbeentransformed.Theprofile views of the facein the third columnreveal thenaturethe individual transformationsandthedirectionof the light source. The top row imageis the true shape;the secondfrom top is a flattenedshape( 7)819;: <>= (asareclassicalbas-reliefs);thethird is anelongatedshape( 7!8@?A: < ); andthebottomis a flattenedshapeplusanadditive plane( 7B8C9;: D , E�8@9F: < , and GH8C9;: 9 ). The first columnshows frontal views of the facesin the third column. From this viewthetrue3-d structureof theobjectscannotbedetermined;in eachimagetheshadowing patternsareidentical,andeventhoughthealbedohasnot beentransformedaccordingto Eq. 3, theshadingpatternsaresocloseasto provide few cuesasto thetruestructure.Thesecond columnshows nearfrontal views of the facesfrom thesamerow, after having beenseparatelyrotatedto compensatefor thedegreeof theflatteningor elongation.Therotationabouttheverticalaxis is D>I for thefirst row of thesecondcolumn; ?KJ I for thesecondrow; J;: L I for thethird; and ?MJ I for thefourth row. To masktheshearingproducedby theadditive plane,thefourth row hasalsobeenrotatedby < I abouttheline of sight.

4 Belhumeur, Kriegman,andYuille
Beyondexplainingtheeffectivenessof relief sculp-tures,thegeneralizedbas-reliefambiguityalsohasim-plicationsfor ourunderstandingof humansurfaceper-ceptionandfor thedevelopmentof computationalvi-sion algorithms. Our resultssupportthe recentpsy-chophysicalfindingsof [19] that for a variety of sur-facesthis ambiguityexists andis oftenunresolved inthehumanvisualsystem.Likewise,theresultssuggestthat the aim of structurerecovery might be a weakernon-Euclideanrepresentation,suchas an affine rep-resentation[17, 26, 27, 31], a projective representa-tion [7], or anordinalrepresentation[8]; for many ap-plications,machinevision systemsneednot resolvethis ambiguity.
In summary, this paper will make the followingpoints:N Thesetof castandattachedshadowsproducedby
asurfaceandaGBRtransformedsurfaceareiden-tical, irrespectiveof thematerialtype.N If the materialcan modeledas having Lamber-tian reflectance,then the set of possibleimagesincluding shadowing under any lighting condi-tion (illumination cone[3, 4]) for anobjectandaGBR transformedobjectareidentical. (Note theGBRtransformationaltersboththesurfacegeom-etry andsurfacealbedo.)Therefore,theseobjectscannotbedistinguishedby any recognitionalgo-rithm.N The generalizedbas-relieftransformationis theonly transformationwhich has these first twoproperties.N Underorthographicprojection,the setof motionfieldsproducedby a surfaceandits classicalbas-relief areidentical[13, 17]. Therefore,anobjectandits relief cannotbe distinguishedfrom smallunknown cameramotion.N For photometricstereowherethe light sourcedi-rectionsare unknown, the structurecan only bedeterminedupto ageneralizedbas-relieftransfor-mation,andshadowsdonotprovidefurtherinfor-mation.Usingprior informationaboutthealbedoandlight sourcestrength,thestructurecanbede-terminedupto areflectionin depth.Castshadowscanbeusedto distinguishthesetwo cases.
Illustrating the GBR ambiguity, Fig. 2 shows fourgraphicallyrenderedhumanheads:a “normal” headand three distorted headsobtainedthrough a GBRtransformationof the original. When the headsare
observedfrontally andunderappropriatelypositionedlight sources,the resultingimagesareso similar thattheirdifferencesprovidefew cuesto thetruestructure.Evenwhentheheadis rotatedby a smallamount,theambiguitycannotbe resolved. Only througha largemotion(e.g.,thesideviews) is thebas-relieftransfor-mationrevealed.
2. Bas-Relief Ambiguity: Illumination
In this sectionwe presentdetailsexplainingthecom-plicity of factorsthatgive rise to thegeneralizedbas-relief ambiguity. In particular, we show that thereis aduality betweena particularsetof transformationsofan object’s shapeandthe light sourceswhich illumi-nateit. Herewe considerdistantillumination (paral-lel illuminating rays)of objectsviewed underortho-graphicprojection(parallellinesof sight).
Consider a surface observed under orthographicprojectionanddefinea coordinatesystemattachedtothe imageplanesuchthat the O and P axesspantheimageplane. In this coordinatesystem,the depthofeveryvisible point in thescenecanbeexpressedas Q�R���������where � is a piecewise differentiablefunction. Thegraph of ���������� , i.e., �������S�K��������� , definesa sur-facewhich will alsobe denotedby � . The directionof the inwardpointingsurfacenormal T�������� canbeexpressedas
T��������U� VWYX �[ZX �[\. ]^(1)
where �[Z and �F\ denotethe partial derivatives of �with respectto � and � respectively.
Considertransformingthe surface � to a new sur-face �� in the following manner. We first flatten (orscale)it alongthe _ axisandthenadda plane,i.e.,�����������`�R�a������������)���b�c���where �ed�f* [5]. We call this transformationthegeneralizedbas-relief(GBR) transformation.SeeFig-ures2 and3. When �+�g* and �h�i* , we refer tothisastheclassicalbas-relieftransformation,sincefor

TheBas-ReliefAmbiguity 5
�j,0. the surfaceis flattenedlike classicalbas-reliefsculptures.
Note that if k � �������S�K��������� and �k �������S�������������� , then �kl�hmnk wheremC� VW ./*/**o."*�g�/� ]^ 2 (2)
Underthe matrix productoperation,the set mqpQri�s mut formsa subgroupof mqvw��xy with
muz|{}� .� VW � * ** � *X � X ��. ]^ 2Also, notethat for imagepoint ������� , therelationbe-tweenthe directionof the surfacenormalof �� and �is given by ~T/�om zS� T where m za�/� ��m � z�{ ���m z|{ � . As will be seenin Section4, this is theonly lineartransformationof thesurface’snormalfieldwhich preservesintegrability.
Let thevector 6 denotea point light sourceat infin-ity, with themagnitudeof 6 proportionalto the inten-sity of the light source. (For a more generalmodelof illumination, e.g., one that doesnot restrict lightsourcesto beat infinity, see[21].) We first show thatshadowing on a surface � for somelight source6 isidenticalto thaton a GBR transformedsurface �� withanappropriatelight source�6 ; we thenshow thatif the
1
n
n
p
n
n
p1
p2 p2
ss
Fig. 3. The imagepoints that lie in shadow for a surfaceunderlight source� are identical to thosein shadow for atransformedsurfaceunderlight source���8���� . In this 2-dillustration, the lower shadow is an attachedshadow whilethe upperoneis composedof both attachedandcastcom-ponents.A generalizedbasrelief transformationwith bothflatteningandanadditive planehasbeenappliedto the leftillustration,yielding theright one.For diagrammaticclarity,thesurfacenormalsaredrawn outward.
surfacesareLambertian,thesetof all possibleimagesof bothsurfacesareidentical.
2.1. Shadows
Wecanidentify two typesof shadows: attachedshad-owsandcastshadows[2, 28]. SeeFigure3. A surfacepoint k5�o������S�K����������� lies in an attachedshadowfor light sourcedirection 6 if f T��������� � 6�,�* . Thisdefinitionleadsto thefollowing lemma.
Lemma 1. A point k��f������S�K����������� lies in anattachedshadowfor light source direction 6 iff �k���������S� �� ������� lies in an attached shadowfor lightsourcedirection �6w��mq6 .Proof: If a point k on � lies in anattachedshadow,then T � 6�,C* . On the transformedsurface,thepoint�kH�5�������a������������ alsoprojectsto �������� , andfor thispoint �T � �6H����m zS� T� � mq6-��T � 6 . Therefore, �k isalsoin anattachedshadow. Theconverseclearlyholdsaswell.
A necessarycondition for a point on the surfacek { ����� { ��� { �M����� { �� { to fall on the cast shadowboundaryfor light sourcedirection 6 is that thereex-istsanotherpoint k �n�����a�;���;�[�K�������y��;�A on thesur-facesuchthat the light ray in the direction 6 passingthrough k � grazesthesurfaceat k�� andintersectsthesurfaceat k { . Thepoint k�� is theboundaryof anat-tachedshadow.
Lemma 2. A point kj�/������S�K���������� satisfiesthenecessaryconditionfor lying ona castshadowbound-ary for light sourcedirection 6 iff �k'��������S�������������satisfiesthe condition for light source direction �6H�mq6 .Proof: The condition for a point k { to be on ashadow boundarycastby k � is that� T �� 6#��*k�� X k { ���S6for some�),�* . For thetransformedsurface,thefirstconditionfor a point to beon theshadow boundaryis�T �� �6w�5��m za� T��A � mq6w�hT �� 6��h*�2UndertheGBR transformation�k&�+mnk , andthesec-ond conditioncanbe expressedfor the relief surface

6 Belhumeur, Kriegman,andYuille
as �k � X �k { X �� �6C��m���k � X k { X ���mq6����k�� X k { X ��S6w��*�2This conditionclearly holdswhen ��R��� . The con-verseof this lemmacanbesimilarly proven.
This lemmabecomesbothnecessaryandsufficientfor a point to lie on a shadow boundarywhentherayfrom k { passingthrough k�� doesnot intersectanyotherportionof thesurfacefor both � and �� . In gen-eral,this is truewhen �B(&* .
Takingthesetwo lemmastogether, it follows thatifsomeportion of the surface � is in a castor attachedshadow for a light sourcedirection 6 , thenif the sur-faceis subjectto aGBRtransformationm , thereexistsa lighting direction �6w��mq6 suchthatthesameportionof the transformedsurfaceis also shadowed. Let usspecify theseshadowed regions – both attachedandcast– througha binaryfunction �n�>� �[�������� suchthat
�n�>� �[�������`� � * if �������� is shadowed. otherwise.
Usingthisnotationandtheabovetwo lemmas,wecanthenwrite � �>� � �������`�R�H��F� �� ������� .
We should stressthat the shadowing �n�>� �[�������from direct illumination by a light sourceis a func-tion of theobject’s geometry– it is unaffectedby thereflectancepropertiesof thesurface.{ For any surface,any light sourcedirection,andany GBR transforma-tion of that surface,thereexists a light sourcedirec-tion suchthat the shadowing will be identical. Fur-thermore,the GBR transformationis the only trans-formationfor which this is true.SeetheAppendixfora proof for objectswith convex shape.
2.2. Shading
We now show that if the surfacereflectanceis Lam-bertian[11, 20], thenthe setsof imagesproducedbya surface(i.e., the surface’s illumination cone[3, 4])anda transformedsurfaceunderall possiblelightingconditionsareidentical.Letting thealbedoof a Lam-bertiansurface � bedenotedby �S������� , the intensityimageproducedby a light source6 canbe expressedas � �>� �A� � �������`�@� �>� � ����������������� � 6
where��������� is theproductof thealbedo�S�������� andtheinwardpointingunit surfacenormal �T�������� .
As shown in thefollowing lemmawhenthegeome-try of � is transformedto �� , theremustalsobea cor-respondingtransformationof thealbedogivenby
��u� ��h �¡��� Z �)�� � �h�¡��� \ �&�� � ��.� �Z �&� �\ ��. ¢¤£¥ 2 (3)
The effect of applyingEq. 3 to a classicalbas-relieftransformation*/,��g,¦. is to darken points onthesurfacewhereT pointsaway from theopticalaxis.Notethatalbedoandgeometrictransformationaredis-cussedin [18].
Lemma 3. For each light source 6 illuminating aLambertiansurface��������� with albedo �S������� , thereexistsa light source �6 illuminating a surface �� ��������(a GBRtransformationof � ) with albedo ��S������� (asgivenin Eq.3), such that § �>� �A� ¨ ����������h§|��;� ��A� �� ������� .Proof: Theimageof � is givenby§©�>� �ª� �ª����������R�n�>� �ª�������«� � ��������6For any xb¬�x invertiblematrix , wehave that§©�>� �A� �[�������U���n�>� �[��������� � �������� z�{ #6y2Sincemqp®r is asubgroupof mqv#��xy and �n�>� �[�������`��-��[� �� ������� ,§©�>� �A� �F�������j���n�>� �[��������� � ��������m z|{ mq6���H��;� �� ������� �� � �������� �6��§|��y� ��A� � � ��������where ����������U��m zS� ��������� and �6w��mq6 .
Thetransformationon thealbedogivenby Eq.3 issubtleandwarrantsdiscussion.For � closeto unity,the transformationon albedois nearly impossibletodetect. That is, if you transformthe shapeof a sur-faceby a GBR transformation,but leave the albedounchanged,then the differencesin the imagespro-ducedundervarying illumination seemtoo small toreveal the structure.In Fig. 2, we left the albedoun-changed,��S�������U���S�������¯� andeventhough � rangesfrom 0.5to 1.5,thedifferencesin shapecannotbedis-cernedfrom the frontal images. However, when thealbedois unchangedandtheflatteningis moresevere,

TheBas-ReliefAmbiguity 7
e.g., tenfold ( �@�°*�2±. ), the shadingpatternscan re-veal the flatnessof the surface. This effect is oftenseenon very low relief sculptures(e.g., Donatello’srilievoschiacciato) which reproduceshadowing accu-rately, but shadingpoorly.
For thesetof imagesto be identicalit is necessarythat thealbedobe transformedalongwith thesurfaceand �+(�* . When �+,�* , the surface �� is inverted(asin intaglio); for a correspondingtransformationofthe light source�6 , the illuminatedregionsof theorig-inal surface � and the transformedsurface �� will bethe same. This is the well known “up/down" (con-vex/concave) ambiguity. However, the shadows castby �� and � maydiffer quitedramatically.
With theabove threelemmasin hand,we cannowstateandprovethecentralpropositionof thissection:
Proposition 1. Thesetof imagesunderall possiblecombinationsof distant light sourcesproducedby aLambertiansurface � with albedo �a�������� and thosesurfaces �� differing by any GBRtransformationwithalbedo ��S������� givenbyEq.3 are identical.
Proof: FromLemmas1, 2, and3, we have that theimageof asurface� producedby asinglelight source6 is the sameas the image of a GBR transformedsurface �� producedby the transformedlight source�6w�hmq6 , i.e., § �>� �ª� � �����������§|��y� ��>� �� �������²2 Whentheob-ject is illuminatedby a setof light sources
s 6>³�t , thentheimageis determinedby thesuperpositionof thoseimagesthatwouldbeformedundertheindividuallightsources.Similarly, the sameimagecanbe producedfrom thetransformedsurfaceif it is illuminatedby thesetof light sourcesgivenby
s �6 ³ ty� where �6 ³ �0mq6 ³ .Taken together, the above resultsdemonstratethat
whenboth the surfaceand light sourcedirectionaretransformedby m , both the shadowing and shadingare identical in the imagesof the original and trans-formedsurface. An implication of this result is thatgivenany numberof imagestakenfrom a fixedview-point,neithera computervision algorithmnorbiolog-ical processcandistinguishtwo objectsthatdiffer bya GBR transformation.Knowledge(or assumptions)aboutsurfaceshape,surfacealbedo,light sourcedi-rection,or light sourceintensitymustbeemployedtoresolve this ambiguity. SeeagainFig. 2.
3. Bas-Relief Ambiguity: Motion
While neither the shadingnor shadowing of an ob-ject,seenfrom asingleviewpoint,revealstheexact3-d structure,motiondoesprovide additionalcues[32].If thesurfaceundergoesa rigid motionandis viewedunder perspective projection, the object’s Euclideanstructurecanbe determinedfrom as few as two im-ages[22, 25, 33]. If theobjectis viewedorthograph-ically, the object’s structurecan only be determinedupto aoneparameterfamily of affinedistortionsfromtwo images[17]. To determinetheEuclideanstructureunderorthographicprojection,at leastthreeimages,takenfrom separateviewpoints,areneeded.
Yet,complicationsarisewhentheobject’smotionissmall.For infinitesimalmotionunderperspectivepro-jection, the structureestimatesaresensitive to noise,producinganimplicit errorin theestimateof thereliefof the surface[24, 30]. For small (infinitesimal)un-known motionunderorthographicprojection,thereisa genuinebas-reliefambiguity: the shapeof the sur-facecanonly be recoveredup to a scalefactorin thedirectionof the camera’s optical axis, i.e., a classicalbas-relieftransformation( ��('*���´�h�!�h* ).
To seethis, let us assumethat the surfacedoes,infact, undergo an arbitrary infinitesimal motion. Thevelocity µk��$� µ� � µ�a� µ � of a point k��������a�K ¶ on thesur-face � inducesa velocity � µ��� µ�� in the imageplane.The collection of velocitiesfor all points in the im-ageplaneis oftencalledthe motionfield [11]. In thefollowing proposition,we show that thesetof motionfieldsinducedby all 3-d infinitesimalmotionsof asur-face � is the same,underorthographicprojection,asthesetof all motion fieldsof a surfacediffering by aclassicalbas-relieftransformation(not a generalizedbas-relieftransformation).
Proposition 2. Thesetof motionfieldsinducedbyall 3-D infinitesimal motionsof a surface � is thesame, under orthographic projection, as the set ofall motionfieldsof a surfacediffering by a bas-relieftransformation ����������`�R����������� where �ld�h* .Proof: Let ·'�5�¡· Z �M· \ �K·�¸ª and ¹-�+��¹ Z ��¹ \ �¹|¸[respectively denotethe angularandlinear velocity ofthe surface � with respectto the observer. The 3-dvelocity of a point k on � is µkc�+·R¬�kB�c¹ . For thetransformedsurface, �k)��mnk with �´������* , andthevelocityof thepoint is givenby µ�kH� �·�¬���mnk��� �¹ . Itis easyto show thatthemotionfieldsfor bothsurfaces

8 Belhumeur, Kriegman,andYuille
will be identical(i.e., µ�)� µ�� and µ�º� µ�� ) when �¹ Z �¹ Z , �¹ \ ��¹ \ , �·�¸��h·�¸ , �· Z �R· Z¶» � and �· \ �R· \;» � .Thatis, thecomponentof theangularvelocityparallelto the imageplaneis scaledinverselywith respecttothe relief. Thus,for every motion � thereis a motionof �� that will yield the samemotion field andso thesetof motionfieldsis identical.This proof follows theresultsin [17, 26]. An implica-tion of Proposition2 is thatunderorthographicprojec-tion,asmallmotionof eithertheobjector theobservercannotresolve thebas-reliefambiguity. Furthermore,sincethemotionfield is linearin ���������� , theclassicalbas-relieftransformationis theonly transformationof� thatwill bepreservethesetof motionfields.
Revisit the secondcolumnin Figure2. Theimageproducedby the“normal” relief aftera rotationof ¼F½from frontal is nearlyidenticalto theimagesproducedby arotationof .©¾¶½ for theflattenedheadand ¾�2 ¿¶½ forthe elongatedhead. No rotation,however, will com-pletely disguisethe distortionsproducedby the bot-tom imagein the secondrow where �hd�1* ; herewerotatedthe headby .>*¶½ aroundthe vertical axis andthenby 3 ½ abouttheline of sight.
4. Integrability, Reconstruction, and the Bas-Relief Ambiguity
In this section, we investigatethe role of the gen-eralizedbas-reliefambiguity on surface reconstruc-tion using photometricstereo. Let us assumethata Lambertiansurfaceis illuminated by a point lightsourceat infinity. Whenthereis no shadowing (i.e.,� �>� � �������B�À. ), the intensity imageproducedby alight source6 canbeexpressedas
� �>� �A� � ��������`����������� � 6 (4)
where ���������� is the productof the albedo �S������� ofthe surfaceandthe inward pointing unit surfacenor-mal �T�������� . Frommultiple imagesof theobjectseenfrom a fixedviewpoint but with differentlight sourcedirection, we can solve Eq. 4 for � when the lightsourcestrengthsand directionsare known. This, ofcourse,is the standardphotometricstereotechnique,see[11, 29,34].
However, if thelight sourcestrengthsanddirectionsarenot known, thenwe canonly determinethevectorfield ��������� of surfacenormalsandalbedosup to ax�¬-x linear transformation.For any invertible x�¬-x
lineartransformationCÁBmqvw��xy [10, 5, 26]� ��6w�+��Y�%���qzS��6y2 (5)
Notethatnumerousvisionproblemshavethisbilinearform anda similar linearambiguity[18].
If ���������� is thetruevectorfield of surfacenormals,thenthe recoveredvectorfield �%Ây������� is any vectorfield in the orbit of ���������� underthe group mqvw��x¶ .For apixelatedimagewith nosurfacepoint in shadow,�% canbeestimatedfrom acollectionof imagesusingsingularvaluedecomposition;whensomeof the sur-facepointsareshadowed,Jacobs’methodcanbeusedto estimate�% [14]. Note, however, that not all vec-tor fields �%Â;������� correspondto continuous(or evenpiecewise continuous)surfaces.We will usethis ob-servationto restrictthegroupof allowabletransforma-tionson ���������� [5].
If � is transformedby an arbitrary ÃÁÄmqv#��x¶(i.e., any vector field �`Ây������� in the orbit of � un-der mqv#��xy ), thenin general,therewill be no surface�|Â[������� with unit normal field �T%ÂF�������� and albedo��Â;������� that could have producedthe vector fieldÅ Â[������� . For �|Â;�������� to be a surface,it mustsatisfythefollowing integrability constraint[12]:� ÂZA\ �R� Â\¯Zwhich, in turn,means�  �������� mustsatisfy Å Â{Å ÂÆ ¢ \ � Å Â�Å ÂÆ ¢ Z (6)
where �`¤�g� Å Â{ � Å Â� � Å ÂÆ � andthe subscripts� and �denotepartialderivatives.
Proposition 3. If ��������� correspondsto a surface���������� with albedo �S�������� , then the set of lineartransformation�`ÂF�������U��Y��������� which satisfytheintegrability constraint in Eq. 6 are 1�"m zS� wherethe generalizedbas-relief transformationsm is givenin Eq.2.
Proof: The integrability constraintgiven in Eq. 6canbewrittenas � Å Â{Ç X Å Â�MÈ Å ÂÆ � Å ÂÆ È Å Â� X Å ÂÆ Ç Å Â{ �@* .Letting w³4É be the ÊM�¡Ë -th elementof , and recall-ing that �  �0#� , the left handsideis a function ofÅ ³�������¯� Å ³ÌÈ�������� and
Å ³ Ç �������� for Êw��.;�KÍ���x . Sincethesefunctionsaregenerallyindependent,the coeffi-cientsof thesefunctionmustall vanishfor theintegra-bility constraintto hold for all ������� . This leadsto thefollowing algebraicconstraintson theelementsof .

TheBas-ReliefAmbiguity 9ÎÏÏÏÏÐ ÏÏÏÏÑ #�K�©Æ { X w� { Æ �w��*#� { Æ�Æ X w� Æ Æ { ��* { �© Æ�Æ X { Æ Æ �w��* { �© Æ { X {�{ Æ �w��*#�K�© Æ�Æ X {�{ ÆKÆ �c { Æ Æ { X Æ �©w� Æ �h*
Sincethis systemis homogeneous,for any satis-fying this system,Ò¶ alsosatisfiesthe system;vary-ing Ò correspondsto changingthe light sourceinten-sity while making a correspondingglobal scalingofthealbedofunction. It canbeshown that if Æ�Æ �5* ,thematrix satisfyingtheconstraintsis singular. Sowe canlet ÆKÆ �". , andsolve for theremainingcoef-ficients. Theonly nonsingularsolutionis {�{ �$w���and { �u�$#� { �" Æ { �$ Æ �u�$* . That is, mustbea generalizedbas-relieftransformation.
The choice of �`Ây�������� is, of course,not uniquesince �`Â;��������´�omn� satisfiesthe integrability con-straint for any mÓÁRmqp®r . Yet, every �  hasa cor-respondingsurface �| with a correspondingalbedo�S������� , andthesesurfacesdiffer by a GBR ambigu-ity. Thus,if we have at leastthreeimages– eachac-quired underdifferent light sourcedirections– of aLambertiansurface ���������� , thenby imposingthe in-tegrability constraintin Eq.6, we canrecover thesur-face ��������� up to a GBR transformation �� ��������º��a������������R���´�C���S2 See[35] for a methodto esti-matean integrable
Å Â from imagedata. Note that noinformation given in the imageshadows can resolvethis ambiguity, asSection2 showedthat thesetof allpossibleimagesof a surface��������� is invariantunderthe GBR transformation.It shouldbe notedthat FanandWolff showed that the Hessianof ��������� canbedeterminedfrom threeimagesup to scalefactorusingthe integrability constraintto enforceequalityof theoff-diagonalelements,� Z>\ ��� \¯Z [6]. The unknownscaleof the Hessiancorrespondsto the parameter�andtheunknown initial conditionsof FanandWolff ’sdifferential equationcorrespondto the parameters�and � .
If, however, we have additionalinformationaboutthealbedoor the strengthof the light sourceswe canfurtherrestricttheambiguity.
Corollary 1. If the albedo �S������� is constant(orknown),or the light sources 6A³ all havethe same(orknown) intensity, then the GBR ambiguity m is re-strictedto thebinary subgroupgivenby ���RÔ®.y��º�*�� and ����* .
Proof: If �S��������� Õ ���������©Õ is constant (orknown), thenfor Õ ����������©Õy�$Õ �%Â;�������©Õ¶�"Õ Y���������©Õ , mustpreserve lengthfor any � . Theonly matricesthatpreservelengtharetheorthonormalmatrices.Theonly orthonormalmatricesthatarealsoGBRtransfor-mationscorrespondto �´�"Ô®.;���H�C*�� and ���C* . Asimilar argumentholdswhenthe light sourceintensi-tiesareknown.
Thus, we can determinethe true surface up to asign, i.e., ������������ÖÔn��������� . This is the classi-cal in-out ambiguity that occursin shapefrom shad-ing [11, 23]. Note however, that the shadowing con-figurationschangewhen � changessign,andif shad-owing is present,this ambiguitycanberesolved.
In contrastto [10], it is worth noting that the sur-face cannotbe recoveredusing known albedo(e.g.the white world assumption)alone. This assumptiononly allows one to restrict to orthogonaltransfor-mation(rotationandreflections).While it mightseemthat rotation of a normal field (as representedin the� field) would simply correspondto a rotatedsurface,the resultingnormalfield is not integrableandthere-foredoesnot correspondto asurface.
5. Conclusion
We have shown thatunderany lighting condition,theshadingandshadowing on anobjectwith Lambertianreflectanceare identical to the shadingand shadow-ing onany generalizedbas-relieftransformationof theobject. The GBR transformationis uniquein that itis the only transformationof the surfacehaving thisproperty. Thus, from a singleviewpoint, thereis anambiguityin therecovery of thesurface:we canonlydeterminetherelief of thesurfaceupto athreeparam-eterfamily of linear transformations.No informationin either the shadowing or shadingcan resolve this.Furthermore,not even the motion fields producedbysmallmotionsof theviewer(or object)canresolvethesurfacerelief.
Leonardoda Vinci’s statementin the introductionthatshadowsof relief sculptureare“foreshortened”is,strictly speaking,incorrect. However, reliefs areof-ten constructedin a mannersuchthat the castshad-ows will differ from thoseproducedby sculptureinthe round. Reliefs have beenusedto depict narra-tives involving numerousfigures locateda different

10 Belhumeur, Kriegman,andYuille
depthswithin thescene.Sincethe slabis usuallynotthick enoughfor the artist to sculptthe figuresto theproper relative depths,sculptorslike Donatello andGhiberti employed rules of perspective to determinethe sizeandlocationof figures,sculptingeachfigureto the properrelief [16]. Barring the effectsof con-stantalbedo,theshadingandshadowing for eachfig-ure is self consistent;however, theshadowscastfromonefigureontoanotherareincorrect.Furthermore,theshadows castonto thebackgroundslab,whoseorien-tation usually doesnot correspondto that of a wallor floor in the scene,are also inconsistent. Thus,Leonardo’s statementis an accuratecharacterizationof complex reliefssuchasGhiberti’sEastDoorsontheBaptisteryin Florence,but doesnot apply to figuressculptedsingly suchastheonesshown in Figure1.
Putting the subtletiesof relief sculptureaside,weshouldpointout thatwhile shadowing is preservedex-actly underGBR transformationsof an object, thereare certainshadingeffects which are not. Specular-ities arising from non-Lambertian(glossy) surfacesandtheeffectof inter-reflectionof light from onepartof a surfaceonto anotherdependon the surfacere-lief. Nevertheless,theseeffects may be secondaryin that they may not allow a humanobserver to re-solve the GBR ambiguity – even when viewing aknown object. Recently, Koenderink,VanDoornandChristonperformedaseriesof psychophysicalexperi-mentsin which subjectsobserve imagesof sculptures(oneabstractandonetorso)andprovide estimatesofthe orientationof the surface normalsat about 300points[19]. Sincetheestimatedvectorfield of normalssatisfiesanintegrability constraintfor all subjects,thisexperimentprovidesevidencethathumansmaintainasurfacerepresentationof anobservedscene.Further-more,while thesubjectscorrectlyestimatetheoverallshapeof the surface,they consistentlymiss-estimateits relief andslant.
Thenatureof GBRambiguityandits apparentpres-encein thehumanvisualsystemsuggestthatmachinevision systemswill also be similarly impaired. Oneobjective of computervision is the recovery of mod-els of surfacesfrom multiple images.In photometricstereo,theEuclideanstructureis estimatedfrom mul-tiple imagesof a scenetaken from a fixed viewpoint,but underdifferent lighting conditionsfor which theilluminant directionsare known [11]. While it hadbeenthought that photometricstereowith unknownlight sourcedirectionscould be solved by first esti-
matingthelight sourcedirectionsandthenestimatingthe surfacestructure,this paperhasshown that theseestimatesarecoupledthrougha GBR transformation.Theonly wayto resolvetheseambiguitiesis to usead-ditionalinformationbesidethatcontainedin theimagedata[10, 5, 35].
Recently, it has beenproposedthat structurere-covery methodsshouldbe stratifiedaccordingto theavailableinformationaboutthe imageformationpro-cess[7, 17, 26]. Sofor example,theEuclideanstruc-tureof a sceneobservedunderperspective canbe re-coveredfrom two imageswhen the camera’s intrin-sic parameters(e.g.,focal length,principal point) areknown. When they are unknown, the structurecanonly be recoveredup to a projective transformation.Here, we introducea new layer of the stratificationbetweenaffine and Euclideanstructure. Thesenon-Euclideanrepresentations(affine[17,26,27,31], pro-jective [7] or ordinal [8]), can still be usedto solvenumerousvision-basedtaskssuchasobjectandfacerecognition[9], vehiclenavigation,roboticmanipula-tion andsyntheticimagegenerationwithoutresolutionof theseambiguities.
Appendix: Uniqueness of the Generalized Bas-Relief Transformation
Hereweprovethatthegeneralizedbas-relieftransfor-mationis uniquein that thereis no othertransforma-tion of theobject’s surfacewhich preservesthesetofimagesproducedby illuminating the object with allpossiblepoint sourcesat infinity. We consideronlythesimplestcase– asmoothobjectwith convex shapecastingnoshadowsonits own surface– andshow thatthe setof attachedshadow boundariesand, thus, thesetof imagesarepreserved only undera GBR trans-formationof theobject’s surface. In its currentform,the proof requiresthat objecthasa collectionof sur-facenormalscovering the Gausssphereand that theobject’soccludingcontouris entirelyvisible.
Recall that an attachedshadow boundary is de-finedasthecontourof points �������a�M��������� satisfyingT � 6w��* , for some6 . Herethemagnitudeandthesignof the light sourceareunimportantasneithereffectsthe locationof the attachedshadow boundary. Thus,let the vector 6o�o�¡× { �M× � �K× Æ � denotea point lightsourceat infinity, but let us equateall light sourcesproducingthe sameattachedshadow boundary, i.e.,

TheBas-ReliefAmbiguity 11
��× { �K×A�;�M× Æ � �Ø��Ù�× { �KÙ�×A�F�MÙ�× Æ �jÚ Ù�ÁÜÛ Ýq�KÙid�Þ* .With this, the spaceof light sourcedirections ß isequivalent to the real projective plane ��Û Ý}Û à � , withthe line at infinity given by coordinatesof the form��× { �K× � �K*y .
Let the triple TØ�Ä��á { �á � ��á Æ � denotea surfacenormal. Again, themagnitudeandsignof thesurfacenormalareunimportant,soweequate��á { �á|�F��á Æ � ���Ù�á { �KÙ�á|�F�KÙ�á Æ � Ú Ù�ÁºÛ Ýq�KÙ�d�C* . Thus,thespaceofsurfacenormals â is, likewise, equivalent to Û Ý}Û à � .Note that under the equation T � 6'�ã* , the surfacenormalsarethe dual of the light sources.Eachpointin the Û ÝYÛ à � of light sourceshasa correspondinglinein the Û Ý}Û à � of surfacenormals,andviceversa.
Let usnow considertheimagecontoursdefinedbythe points ������� satisfying T � 6$�Ö* , for some 6 .Theseimagecontoursaretheattachedshadow bound-ariesorthographicallyprojectedontotheimageplane.For lack of a bettername,we will referto themastheimagedattachedshadow boundaries.
The setof imagedattachedshadow boundariesforaconvex objectformsanabstractprojectiveplaneÛ à � ,wherea “point” in the abstractprojective planeis asingleattachedshadow boundary, anda “line” in theabstractprojectiveplaneis thecollectionof imagedat-tachedshadow boundariespassingthrougha commonpoint in the imageplane. To seethis, note the obvi-ousprojective isomorphismbetweenthe real projec-tiveplaneof light sourcedirectionsß andtheabstractprojective plane of imagedattachedshadow bound-aries Û à � . Under this is isomorphism,we have a bi-jectionmappingpointsto pointsandlinesto lines.
Now let ussaythatwearegiventwo objectswhosevisible surfacesaredescribedby respective functions��������� and ä��������� . If the objectshave the samesetof imagedattachedshadow boundariesasseeninthe image plane (i.e., if the set of image contoursproducedby orthographicallyprojectingthe attachedshadow boundariesis thesamefor bothobjects),thenthequestionarises:How arethetwo surfaces���������and ä� ������� related?
Proposition 4. If two convex surfaces���������� and�������� with visible occludingcontours producethesamesetof attachedshadowboundariesasseenin theimage planeunderorthographic projection, then thesurfacesare relatedby a generalizedbas-relief trans-formation.
Û à �
ß � Û Ý}Û à � äß � Û Ý}Û à �
â � Û Ý}Û à � äâ � Û Ý}Û à �åæåæ
ç ç ç>èççç é êêê ë ê ê ê>ìíî
íîDual Dual
Collineation
Collineation
IsomorphismIsomorphism
Fig. 4. The relationshipof different spacesin proof of Proposi-tion 4.
Proof: As illustratedin Figure4,wecanconstructaprojective isomorphismbetweenthesetof imagedat-tachedshadow boundariesÛ à � andthereal projectiveplaneof light sourcedirectionsß illuminating surface���������� . The isomorphismis chosento mapthe col-lection of imagedattachedshadow boundariespass-ing througha commonpoint ������� in theimageplane(i.e., a line in Û à � ) to the surfacenormal T�������� . Inthe samemanner, we can constructa projective iso-morphismbetweenÛ à � and the real projective planeof light sourcedirections äß illuminating the surfaceä����������¯2 Theisomorphismis, likewise,chosento mapthesamecollectionof imagedattachedshadow bound-aries passingthrough �������� in the image plane tothe surfacenormal äT�������� . Under thesetwo map-pings,we have a projective isomorphismbetweenßand äß which in turn is a projective transformation(collineation),see[1]. Becauseâ and äâ arethedualsof ß and äß respectively, thesurfacenormalsof ���������arealso relatedto the surfacenormalsof ä��������� bya projective transformation,i.e., äT��������Q��ïqT���������where ï is a xº¬cx matrix in the generalprojectivegroupGP(3).
Thetransformationï is furtherrestrictedin thatthesurfacenormalsalongtheoccludingcontourof � andä� areequivalent,i.e., the transformationï pointwisefixestheline at infinity of surfacenormals.Thus, ï isof the form givenby Eq. 2, andthe surfaces,in turn,mustberelatedby ageneralizedbas-relieftransforma-tion.

12 Belhumeur, Kriegman,andYuille
Acknowledgments
P. N. Belhumeur was supportedby a PresidentialEarly CareerAward for ScientistsandEngineers,anNSF Career Award IRI-9703134, and ARO grantDAAH04-95-1-0494. D. J. Kriegmanwassupportedby NSF under an NYI, IRI-9257990and by ONRN00014-93-1-0305. A. L. Yuille was supportedbyARO grantDAAH04-95-1-0494andNSF grant IRI-93-17670.Many thanksto David Mumfordfor leadingusto theproofof Proposition4 andto Niko TrojefromMax-Planck-Institute,Tuebingenfor the datausedinFig. 2.
Notes
1. It shouldbe notedthat the image location of a specularityisnot preserved underGBR, andso shadows arisingdueto indi-rectilluminationof thesurfacefrom thevirtual light sourceof aspecularitywill notbepreservedunderGBR.
References
1. E. Artin. GeometricAlgebra. IntersciencePublishers,Inc.,New York, 1957.
2. M. Baxandall.ShadowsandEnlightenment. YaleUniversityPress,New Haven,1995.
3. P. N. BelhumeurandD. J.Kriegman.Whatis thesetof imagesof anobjectunderall possiblelighting conditions? In Proc.IEEEConf. onComp.VisionandPatt.Recog., pages270–277,1996.
4. P. N. BelhumeurandD. J.Kriegman.Whatis thesetof imagesof anobjectunderall possiblelighting conditions? In Int. J.ComputerVision, volume28,pages245–260,1998.
5. R. Epstein,A. Yuille, and P. N. Belhumeur. Learningandrecognizingobjectsusing illumination subspaces.In Proc.of the Int. Workshopon ObjectRepresentationfor ComputerVision, 1996.
6. J. FanandL. Wolff. Surfacecurvatureandshapereconstruc-tion from unknown multiple illumination and integrability.ComputerVision and Image Understanding, 65(2):347–359,February1997.
7. O. Faugeras.Stratificationof 3-D vision: Projective, affine,and metric representations.J. Opt. Soc.Am. A, 12(7):465–484,1995.
8. C. FermullerandY. Aloimonos. Ordinal representationsofvisualspace.In Proc.ImageUnderstandingWorkshop, pages897–904,1996.
9. A. Georghiades,D. Kriegman,andP. Belhumeur. Illuminationconesfor recognitionundervariablelighting: Faces.In Proc.IEEE Conf. on Comp.Vision andPatt. Recog., pages52–59,1998.
10. H. Hayakawa. Photometricstereoundera light-sourcewitharbitrarymotion. JOSA-A, 11(11):3079–3089,Nov. 1994.
11. B. Horn. ComputerVision. MIT Press,Cambridge,Mass.,1986.
12. B. Horn andM. Brooks. The variationalapproachto shapefrom shading.In ComputerVision,GraphicsandImage Pro-cessing, volume33,pages174–208,1986.
13. T. S.HuangandC. H. Lee. Motion andstructurefrom ortho-graphicprojection. IEEE Trans.PatternAnal. Mach. Intelli-gence, 11(5):536–540,May 1989.
14. D. Jacobs.Linear fitting with missingdata: Applicationstostructurefrom motionandcharacterizingintensityimages.InProc.IEEE Conf. onComp.Vision andPatt. Recog., 1997.
15. M. Kemp, editor. Leonardo On Painting. Yale UniversityPress,New Haven,1989.
16. M. Kemp. The Scienceof Art: Optical Themesin WesternArt fromBrunelleschi to Seurat. YaleUniversity Press,NewHaven,1990.
17. J. KoenderinkandA. VanDoorn. Affine structurefrom mo-tion. JOSA-A, 8(2):377–385,1991.
18. J.KoenderinkandA. vanDoorn.Thegenericbilinearcalibra-tion estimationproblem. Int. J. ComputerVision, 23(3):217–234,1997.
19. J. J. Koenderink,A. J. Van Doorn, andC. Christon. Shapeconstancy in pictorial relief. In J. Ponce,A. Zisserman,andM. Hebert,editors,ObjectRepresentationin ComputerVisionII , pages151–164.Springer, 1996.
20. J.Lambert.PhotometriaSivedeMensura et GradibusLumi-nus,Colorumet Umbrae. EberhardKlett, 1760.
21. M. LangerandS. Zucker. What is a light source? In Proc.IEEEConf. onComp.VisionandPatt.Recog., pages172–178,1997.
22. H. Longuet-Higgins.A computeralgorithmfor reconstructingascenefrom two projections.Nature, 293:133–135,1981.
23. J. Oliensis. Uniquenessin shapefrom shading. Int. J. Com-puterVision, 6(2):75–104,June1991.
24. J.Oliensis.Structurefrom linearor planarmotions. In Proc.IEEEConf. onComp.VisionandPatt.Recog., pages335–342,June1996.
25. J. RoachandK. Aggarwal, J. Computertrackingof objectsfrom a sequenceof images.IEEE Trans.on PatternAnalysisandMachineIntelligence, 1(2):127–135,1979.
26. R. RosenholtzandJ. Koenderink. Affine structureandpho-tometry. In Proc. IEEE Conf. on Comp. Vision and Patt.Recog., pages790–795,1996.
27. L. Shapiro,A. Zisserman,andM. Brady. 3D motion recov-ery via affine epipolargeometry. Int. J. ComputerVision,16(2):147–182,October1995.
28. A. Shashua.GeometryandPhotometryin 3D Visual Recog-nition. PhDthesis,MIT, 1992.
29. W. Silver. DeterminingShapeandReflectanceUsingMultipleImages. PhDthesis,MIT, Cambridge,MA, 1980.
30. R. SzeliskiandS.Kang. Shapeambiguitiesin structurefrommotion. In EuropeanConf. onComputerVision, pagesI:709–721,1996.
31. S. Ullman andR. Basri. Recognitionby a linear combina-tion of models.IEEETrans.PatternAnal.Mach. Intelligence,13:992–1006,1991.
32. H. vonHelmholtz.Handbuch derPhysiologischenOptik. Ver-lag vonLeopoledVoss,Hamburg, Germany, 1910.
33. A. Waxmanand S. Ullman. Surface structureand three-dimensionalmotion from image flow kinematics. Int. J.RoboticsResearch, 4:72–92,1985.
34. R. Woodham.Analysingimagesof curvedsurfaces.ArtificialIntelligence, 17:117–140,1981.
35. A. Yuille andD. Snow. Shapeandalbedofrom multiple im-agesusingintegrability. In Proc.IEEEConf. onComp.VisionandPatt. Recog., pages158–164,1997.


![BAS-300G INSTRUCTION MANUAL BAS-311G BAS … BAS-311G, BAS-326G iSAFETY INSTRUCTIONS [1] Safety indications and their meanings This instruction manual and the indications and symbols](https://img.pdfslide.us/doc/110x75/5ad1f1607f8b9a05208c18a3/bas-300g-instruction-manual-bas-311g-bas-bas-311g-bas-326g-isafety-instructions.jpg)