Embed Size (px)
Citation preview

Terrestrial laser scan survey and 3D TIN model construction of urban
buildings in a geospatial database
Tao Tanga*, Wenji Zhaob, Huili Gongb, Aiwu Zhangb, Jiangang Panb andZhiqiang Liub
aDepartment of Geography and Planning, SUNY – College at Buffalo, 1300 Elmwood Ave.,Buffalo, NY 14222-1095, USA; bBeijing Municipal GIS and Remote Sensing Laboratory,College of Natural Resources, Environment, and Tourism, Capital Normal University,
105 Xisanhuanbei Rd., Beijing 100037, China
(Received 17 December 2007; final version received 15 January 2008)
A new method applying close range laser scan (Lidar) survey in capturing 3D objectswas presented in this study. One linear laser source Lidar was used for the survey of theobjects. This approach is particularly essential for 3D modelling of urban buildings in ageospatial database. Data calibration and merging were conducted for combing pointcluster datasets surveyed from different locations and angles of one object in order togenerate a 3D data model for the entire object. The point cluster data were transformedand converted into a triangulated irregular network (TIN) mesh model in a 3Dgeospatial database. The TIN mesh model was compressed and simplified by applying acomputing script of surface variability priority parameters. The digital surface imagesand textures of the building object were draped onto the 3D TIN model according totheir coordinate locations. This research provides a direct and fast means of capturing3D objects on the Earth’s surface in a geospatial database.
Keywords: laser scan; Lidar survey; 3D building model; TIN model
1. Introduction
Three-dimensional data capture of objects on the Earth’s surface is an important aspect ofsurveying and mapping, geospatial database construction, and 3D digital visualization inGeographic Information Systems (GIS). Currently, digital data acquisition is largelyapplied to 2D spatial databases (Binaghi et al. 2003, Amarsaikhan and Douglas 2004,Zkan and Sunar Erbek 2005); and is mainly based on air-borne or space remote sensing(Parrinello and Vaughan 2002, Peng and Liu 2005). In this study, we present a newmethod that applies ground based laser scan (Lidar) survey and 3D digital building modelconstruction. Previously, ground survey of spatial objects was mainly accomplished by asurveying total station or a theodolite (Kerle 2002, Fuller 2003). The method is relativelylabour intensive and requires data conversions from analogue to digital to incorporate theresults into a geospatial database. Recently, laser scan survey (Lidar) technology has beenapplied to various research efforts for 3D model capture and analysis, such as 3D terrainmodeling (Lin 1997, Lloyd and Atkinson 2002, White and Wang 2003, Yang 2005, Morris
*Corresponding author. Email: [email protected]
Geocarto International
Vol. 23, No. 4, August 2008, 259–272
ISSN 1010-6049 print/ISSN 1752-0762 online
� 2008 Taylor & Francis
DOI: 10.1080/10106040801915917
http://www.informaworld.com

et al. 2005), tropospheric aerosol detection (Papayannis and Chourdakis 2002, Landulfoet al. 2005, Kolev et al. 2005), forest canopy or tree species recognitions (Gillespie et al.2004, Hill and Thomson 2005, Koukoulas and Blackburn 2005, Lefskya et al. 2005, Hydeet al. 2005), and surface water chlorophyll measurement (Barbini, et al. 2003a,b, 2004).Most of the studies of terrain modelling, detection of the height of forest canopy, and treespecies recognition were conducted by airborne Lidar remote sensing. By contrast, themajority of studies on aerosol or chlorophyll pollutions were accomplished by eitherground-based or ship-borne laser scan survey.
Combing airborne synthetic aperture radar (SAR) and Lidar data, Gamba andHoushmand (2002) generated a series of digital geospatial map layers including digitalterrain models (DTMs), a land cover map, and 3D building shapes in the urban area ofSan Francisco, USA. In this study, both 2D SAR and 3D Lidar data were used to creategeospatial databases. An urban building based DTM was also generated by a fusion ofinterferometric radar (InSAR) and Lidar data sources in downtown Denver, USA(Gamba et al. 2003). A 3D survey of roadside features was conducted using a mobilevideo-logging system (Jeyapalan, 2004). The research reconstructed digital map layers and3D feature models along the surveyed highway. Zhao and Shibasaki (2005) presented ageospatial database updating method using a vehicle-borne laser scan (Lidar) system(VLMS). The features surveyed were registered to the 3D coordinates of the existinggeospatial database, and 3D building models were generated.
The objective of this research is to provide a streamlined and effective data capture andretrieval method using ground-based laser scan survey and triangulated irregular network(TIN) 3D data interpolation. The advantage of this approach is that the detailedcharacteristics of urban buildings can be directly captured into a geospatial database inGIS.ARiegl (www.riegl.com) terrestrial laser scanner of linear laser source was used in this study(Figure 1). The algorithm of reconstructing a 3D model in geospatial databases wasdeveloped by progressively fitting the geometric shape of the feature into a TIN mesh. Thismakes the results of the 3D model more detail oriented and closely resembles the originalobjects on the ground. More importantly, the simplified TIN model from surveyed pointclusters can be naturally incorporated into 3D geospatial databases for spatial analysis.
2. Close range Lidar survey, experiment design and implementation
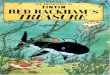
A Riegl linear laser source scanner was used in this study to collect 3D urban buildingdata. The method has a higher speed and accuracy in comparison to conventional groundsurvey. The laser source that was used had a 633 nm wavelength. The angle of horizontalscan is 3608 and the vertical scan is 1108 (Figure 1). The scanning result in essence is a largecluster of points that represents the detailed 3D characteristics of a surface of the surveyedobject, such as an urban building in this study. Each of the points in the point cloud carriesa distance or range value to the laser scan equipment that is represented by a set ofspherical coordinates. The spherical coordinates can be converted into the 3D Cartesiancoordinate system (x, y, z) using the following equations:
x ¼ sði; jÞ cos yj cos ai ð1Þ
y ¼ sði; jÞ cos yj sin ai ð2Þ
z ¼ sði; jÞ sin yj ð3Þ
260 T. Tang et al.

Where S(i, j) is the distance from observational point to the point being surveyed, and iand j are spherical coordinates of point S(i, j); y is the vertical scanning angle, and a is thehorizontal scanning angle (Figure 2).
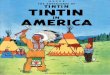
Field survey of selected urban buildings in Beijing, China was conducted. An exampleof survey data prior to the 3D TIN model construction is shown in Figure 3. Figure 3(a) isa picture of the surveyed building, the original scanned point cluster is shown inFigure 3(b), and Figure 3(c) is a 3D point model comprised of scanning points after
Figure 1. Riegl laser (Lidar) scan survey equipment used in this study. Available in colour online.
Figure 2. Principles of coordinate conversion in 3D laser scan and data capture.
Geocarto International 261

pre-processing that filters the background noise. The original point cluster of laser scancontained 126,586 points, and the point cluster after filtering background noisecontained 70,617 points. The ratio of point data retained was 55.8%. The size of thepoint data file after filtering was still very large. The next step is to convert these pointdata to a TIN model and build 3D geospatial databases for these urban buildings andstreet blocks.
2.1. Data calibration and matching
Since laser scan can only detect the surface of the 3D object that faces the surveyingequipment, scanning at multi-observation locations is required in order to obtain the 3Dmodel of an object, including all the surfaces of the object. In terms of reconstructing theentire 3D digital model, matching and merging the laser scanning point clusters fromdifferent observation locations and viewing angles is necessary. Data calibration andmatching in 3D laser scan survey involves merging and matching the point cluster datafrom different observation locations with different 2D coordinates into a unified 3Dcoordinate system for construction of the 3D digital model.
The minimum overlapping requirement of 3D model reconstruction of laserscanning data is 30%. The higher the percentage of overlapping images, the higherthe accuracy of the 3D models. We used correspondent point-based data calibrationand matching in this research. In practice, four corresponding transformation controlpoints were selected in the overlapping areas on each of the point cluster images.Coordinate array transformation was computed using AX¼B, where A and B arecoordinate arrays of the control points in two separate coordinate systems. X is thetransformation array, and X¼A71B (Figure 4). The transformation control pointsare shown in Figure 4(a) and (b); and the building model of 3D point cluster is
Figure 3. Point cluster of laser scan and result of pre-processing. Available in colour online.
262 T. Tang et al.

shown in Figure 4(c) and (d). The transformation array X of this data matching andmerging is:
0:894847 0:012495 0:446198 0:0�0:013962 0:999903 0:012052 0:0�0:446154 �0:006230 0:894934 0:0�11:426744 0:030457 4:963980 1:0
2664
3775: ð4Þ
Another example of matching and merging multiple scanning point data clusters isshown in Figure 5. In this case, it is a large building, the Capital Stadium of Beijing (CSB).The total number of points of the merged survey point clouds of CSB is 2,697,969.
2.2. Pre-processing of point cluster
The objective of survey data pre-processing is to filter out noise and erase backgroundobjects that were captured, which reduces the uncertainties in the dataset. The noise oflaser scan point cluster can be classified into three categories. The first category is the noisecaused by the characteristics of the surface of a surveying object. Material composition,roughness, and curvature of the surveying object contribute to the noise and uncertainty.For instance, the level of data noise drastically increases when the surveying object has adark surface and low albedo. The second type of noise or error may be produced by thesurveying equipment, such as the distance ranging accuracy, scanning resolution, orstability of the device resulting from physical vibration of the ground. The third type of
Figure 4. Point cluster image calibration and matching based on corresponding control points.Available in colour online.
Geocarto International 263

noise is referred to as random errors, such as birds flying through or humans passing thesurveying field while the survey is being conducted.
Three filtering and smoothing methods were performed in this research. These threemethods are automatic smoothing; threshold based filtering; and manual erasing of errors.The structure of surveyed point cluster by Lidar scan is actually 2D although every pointcontains the 3D coordinate attributes of x, y, z after pre-processing. A filtering window onthe display screen was developed in this study for noise and error reduction. Threestandard filtering algorisms – Gaussian, averaging, and median – were applied to thismoving window as it moves through the point database (Figure 6). Figure 7 shows anexample of manually filling the gaps and enhancement of the original point cluster, andFigure 8 shows the smoothed 3D model by a filtering window.
3. Data analysis and TIN digital building model construction in a geospatial database
A TIN model was selected in this research among various 3D digital modelling methods.TIN models can be easily obtained from point cluster data since they utilize irregular
Figure 5. Merged point cluster datasets of Capital Stadium (CSB), Beijing, China. Available incolour online.
264 T. Tang et al.

triangles and nodes (anchor points) to represent the 3D surface of objects. It also bridgesthe gaps among the points in the point cluster dataset.
3.1. 3D TIN mesh construction of the buildings from surveyed point cluster data
A 3D point cluster model generated by Lidar survey is not compatible with othergeospatial data types in Geographic Information Systems (GIS). Several disadvantagesexist when this type of 3D models is used for GIS analysis and visualization. First, notopological relationships exist among the points. Second, a large quantity of points andtheir 3D coordinates must be stored in a computational system in order to realisticallyrepresent the surveying object, which consumes a large computational storage space. Inthis research, the calibrated and merged point cluster models were converted to TINmodels in GIS.
The essential issue of a computational algorithm in developing a TIN model is toreconstruct the topology of a TIN mesh that represents the original 3D surface of theobject surveyed. The algorithm of TIN mesh construction in this study is based ongeometric characteristics and geometric shape of the object surveyed. It utilizes thegeometric control parameters to construct the surface topology of irregular triangles. Thelocal TIN mesh construction in this study is simpler than that of terrain based TINgenerations since the laser scan points are regularly distributed on 2D plane of x, ycoordinates (Figure 9). The result of a TIN mesh model of the building object is shown inFigure 10.
The method of TIN model construction developed in this study is straightforwardand effective. It provides fast conversion of the 3D building model from a pointcluster to a TIN mesh. However, the generated TIN mesh contains a large quantity oftriangles that need to be compressed to save computer storage space and facilitate quickretrieval in GIS spatial databases. The method of TIN compression in this study is toreduce the number of triangles without compromising the representation of the originalgeometric shape of the object surveyed. The algorithm classifies the entire set of nodes
Figure 6. Data filtering methods used in this study.
Geocarto International 265

of irregular triangles by geometric shape of the object first, and then inputs them in acomputational array according to their priority parameters. Priority parameters weredetermined by the surface variability of the object. The higher the surface variabilityratio is, the higher the priority. The final step is to erase the low priority irregulartriangles and triangulate the gaps according to a predetermined threshold. Thecomputational procedure was performed recursively until all unnecessary triangles are
Figure 7. (a) Original laser scan data before gap filling and manual enhancement. (White rectangleboxes identifying the missing data areas.) (b) The 3D point cluster after filling the gaps and manualenhancement. Available in colour online.
266 T. Tang et al.

deleted (Figure 11). The characteristics of TIN mesh compression in this study are: (1)the nodes of the simplified TIN mesh are the sub-cluster of the original nodes. Thisfacilitates the surface texture drape and attachment; (2) detailed changes and
Figure 8. (a) Example of surfaces of 3D building model before smooth filtering. (b) Example ofsurfaces of 3D building model after smooth filtering.
Geocarto International 267

characteristics of the 3D object surface are preserved; (3) the converted TIN modeltransformed from the same resolution everywhere to differential resolutions at differentlocations according to the necessity of representing the object. The spatial resolutions ofthe TIN mesh at the building surfaces with greater variability are higher than that ofuniformed surfaces.
Figure 9. Method of detail TIN mesh construction using laser scan survey point cluster.
Figure 10. TIN mesh based building model using laser scan survey point data.
268 T. Tang et al.

Figure 11. Example of a TIN mesh compression (80% reduction of irregular triangles) of the TINbuilding models.
Figure 12. Method of surface image and texture draping.
3.2. Reconstruction of the surface image and texture
Surface texture and images obtained by digital cameras were extracted. Coordinatepositions of surface image control points were calculated and transformed using the
Geocarto International 269

same 3D coordinate system of the building object (Figure 12). The texture draping on thesurface of the 3D model was controlled by the parameters stated below.
(1) point of origin – the coordinate origin of the image in a 3D coordinate system;(2) a normal vector that controls the spatial orientation of the surface image;(3) x range – the extension of the texture image along the x axis;(4) y range – the extension of the texture image along the y axis.
Draping the surface image and texture on the 3D TIN model of a building advocatesthe originality. It also transfers the details of the original building surface to the digitalmodel. A coordinate transformation can be used to help in draping the texture image tothe exact locations on the 3D model. Since the TIN compression preserved the originalnodes of varying surfaces of the object, coordinate matching of the data points is natural.An example of the final result of texture image draping is shown in Figure 13.
4. Conclusions
The reconstruction of 3D digital models, such as urban building reconstruction, usinglaser scan point datasets can achieve accurate and detailed representations of the objects.In this study, we explored the procedures of data collection, data calibration and 3D datamerging, conversion, reconstruction of TIN models, and draping of surface image andtexture. The equipment, methods, and production flow can be standardized forengineering and computational implementations in large 3D geospatial databaseproductions. In comparison to a conventional photogrammetric survey, laser scan orLidar based survey has certain advantages:
. Positional accuracy of laser scan survey is higher than that of interpolations ofconventional photogrammetry.
Figure 13. Result of image and texture draping on a 3D TIN building model. Available in colouronline.
270 T. Tang et al.

. The original data formats are different. The data from a laser scan are point clusterswith 3D (x, y, z) coordinates for each point. Spatial sampling and measurement canbe directly conducted among the points.
. Data calibration and matching of laser scan survey is accomplished by matching thecoordinates of corresponding points.
. A TIN 3D model can be directly constructed from the laser scan point cluster datausing the algorithm developed in this study.
Laser scan survey based 3D digital model reconstruction can be widely used, not onlyin GIS and remote sensing, but also for digital engineering simulations, topographic mapproductions, as well as 3D imaging for medication purposes. The contribution of thisresearch is the development of basic procedures and methods of 3D digital data captureand modelling of 3D objects, such as urban buildings using laser scan. Ground based closerange laser survey can produce 3D details of the objects in the real world.
References
Amarsaikhan, D. and Douglas, T., 2004. Data fusion and multisource image classification.International journal of remote sensing, 25 (17), 3529–3539.
Barbini, R., Colao, F., Fantoni, R., Fiorani, A., and Palucci, A., 2003a. Lidar fluorosensorcalibration of the SeaWiFS chlorophyll algorithm in the Ross Sea. International journal of remotesensing, 24 (16), 3205–3218.
Barbini, R., Fantoni, R., Palucci, A., Colao, F., Sandrini, S., Ceradini, S., Tositti, L., Tubertini, O.,and Ferrari, G.M., 2003b. Simultaneous measurements of remote lidar chlorophyll and surfaceCO2 distributions in the Ross Sea. International journal of remote sensing, 24 (19), 3807–3819.
Barbini, R., Colao, F., De Dominicis, L., Fantoni, R., Fiorani, A., Palucci, A., and Artamonov,E.S., 2004. Analysis of simultaneous chlorophyll measurements by lidar fluorosensor, MODISand SeaWiFS. International journal of remote sensing, 25 (11), 2095–2110.
Besl, P.J. and McKay, N.D., 1992. A method for registration of 3-D shapes. IEEE transactions onpattern analysis and machine intelligence, 14 (2), 239–256.
Binaghi, E., Gallo, I., and Pepe, M., 2003. A neural adaptive model for feature extraction andrecognition in high resolution remote sensing imagery. International journal of remote sensing, 24(20), 3947–3959.
Fuller, I.C., Large, A.R.G., and Milan, D.J., 2003. Quantifying channel development and sedimenttransfer following chute cutoff in a wandering gravel-bed river. Geomorphology, 54, 307–323.
Gamba, P. and Houshmand, B., 2002. Joint Analysis of SAR, LIDAR and aerial imagery forsimultaneous extraction of land cover, DTM and 3D shape of buildings. International journal ofremote sensing, 23 (20), 4439–4450.
Gamba, P., Dell’Acqua, F., and Houshmand, B., 2003. Comparison and fusion of LIDAR andInSAR digital elevation models over urban areas. International journal of remote sensing, 24 (22),4289–4300.
Gillespie, T.W., Brock, J., and Wright, C.W., 2004. Prospects for quantifying structure, floristiccomposition and species richness of tropical forests. International journal of remote sensing, 25(4), 707–715.
Hill, R.A. and Thomson, A.G., 2005. Mapping woodland species composition and structure usingairborne spectral and LiDAR data. International journal of remote sensing, 26 (17), 3763–3779.
Hyde, P., Dubayah, R., Peterson, B., Blair, J.B., Hofton, M., Hunsaker, C., Knox, R., and Walker,W., 2005. Mapping forest structure for wildlife habitat analysis using waveform lidar: validationof montane ecosystems. Remote sensing of environment, 96, 427–437.
Jeyapalan, K., 2004. Mobile digital cameras for as-built surveys of roadside features. Photogram-metric engineering and remote sensing, 70 (3), 301–312.
Kerle, N., 2002. Volume estimation of the 1998 flank collapse at casita volcano, nicaragua: acomparison of photogrammetric and conventional techniques. Earth surface processes andlandforms, 27, 759–772.
Geocarto International 271

Kolev, N., Tatarov, B., Grigorieva, V., Donev, E., Simeonov, P., Umlensky, V., Kaprielov, B., andKolev, I., 2005. Aerosol lidar and in situ ozone observations of the planetary boundary layerover Bulgaria during the solar eclipse of 11 August 1999. International journal of remote sensing,26 (16), 3567–3584.
Koukoulas, S. and Blackburn, G.A., 2005. Mapping individual tree location, height and species inbroadleaved deciduous forest using airborne LIDAR and multi-spectral remotely sensed data.International journal of remote sensing, 26 (3), 431–455.
Landulfo, E., Papayannis, A., Defreitas, A.Z., Vieira, N.D., Souza, R.F., Goncalves, A., Castanho,D.A., Artaxo, P., SaNchez-Ccoyllo, O.R., Moreria, D.S., and Jorrge, M.P., 2005. Troposphericaerosol observations in Sao Paulo, Brazil using a compact lidar system. International journal ofremote sensing, 26 (13), 2797–2816.
Lefskya, M.A., Hudakb, A.T., Warren, T., Cohenc, B., and Ackerd, S.A., 2005. Patterns ofcovariance between forest stand and canopy structure in the Pacific Northwest. Remote sensingof environment, 95, 517–531.
Lin, C.S., 1997. Waveform sampling lidar applications in complex terrain. International journal ofremote sensing, 18 (10), 2087–2104.
Lloyd, C.D. and Atkinson, P.M., 2002. Deriving DSMs from LiDAR data with kriging.International journal of remote sensing, 23 (12), 2519–2524.
Morris, J.T., Porter, D., Neet, M., Noble, P.A., Schmidt, L., Lapine, L.A., and Jensen, J.R., 2005.Integrating LIDAR elevation data, multi-spectral imagery and neural network modelling formarsh characterization. International journal of remote sensing, 26 (23), 5221–5234.
Papayannis, A. and Chourdakis, G., 2002. The EOLE Project: a multiwavelength laser remotesensing (lidar) system for ozone and aerosol measurements in the troposphere and the lowerstratosphere. Part II: Aerosol measurements over Athens, Greece. International journal of remotesensing, 23 (1), 179–196.
Parrinello, T. and Vaughan, R.A., 2002. Multifractal analysis and feature extraction in satelliteimagery. International journal of remote sensing, 23 (9), 1799–1825.
Peng, J. and Liu, Y.C., 2005. Model and context-driven building extraction in dense urban aerialimages. International journal of remote sensing, 26 (7), 1289–1307.
White, S.A. and Wang, Y., 2003. Utilizing DEMs derived from LIDAR data to analyze morphologicchange in the North Carolina coastline. Remote sensing of environment, 85, 39–47.
Yang, X., 2005. Use of LIDAR elevation data to construct a high-resolution digital terrain modelfor an estuarine marsh area. International journal of remote sensing, 26 (23), 5163–5166.
Zhao, H. and Shibasaki, R., 2005. Updating a digital geographic database using vehicle-borne laserscanners and line cameras. Photogrammetric engineering and remote sensing, 71 (4), 415–424.
Zkan, C.O. and Erbek, F.S., 2005. Comparing feature extraction techniques for urban land-useclassification. International journal of remote sensing, 26 (4), 747–757.
272 T. Tang et al.