Embed Size (px)
Citation preview

■ Summer 2001 marked the tenth AAAI MobileRobot Competition and Exhibition. A decade ofcontests and exhibitions have inspired innovationand research in AI robotics. Here we look back atthe origins of the contest and how it evolved. Wealso reflect on how the contest has served as anarena for important debates in the AI and roboticscommunities. The article closes with a speculativelook forward to the next decade of AAAI robotcompetitions.
“This won’t be a slick, polished competi-tion. There will be a certain amount ofchaos, but I can guarantee there will be alot of excitement and enthusiasm.”
—Tom Dean, 1992
In 1992, Tom Dean and Pete Bonasso con-vinced the American Association for Artifi-cial Intelligence (AAAI) to host a robot com-
petition at the National Conference on AI; theAAAI Mobile Robot Competition and Exhibi-tion was born. The event has endured tobecome the oldest AI-centric robotics competi-tion in the world. As we near the end of ourfirst decade, it seems worthwhile to reflect onwhat the origins of the event were, how it hasevolved, and where it is headed.
Pete Bonasso recalls that the entertainmentindustry had laid some of the groundwork forthe contest by building expectations andexcitement about robots in many people’simaginations. Characters such as Star Trek’sCOMMANDER DATA and BISHOP, the “artificial per-son” in James Cameron’s Aliens, made us allthink about what might be possible. The con-crete idea for a competition took root after apanel at AAAI-1991 on household robots.“Neats and scruffies alike were mesmerized bythe animal-like responses of the robots demon-strated there,” says Bonasso. “At the end ofthat panel, a bunch of us got with Tom to talkup the idea of a competition.”1
Then-president of the AAAI, Patrick Hayes,hoped the contest would highlight the “cogni-tive possibilities for mobile robots” anddemonstrate “the long-standing symbioticrelationship between AI and robots” (Deanand Bonasso 1993). Of course, some felt thereis more than a symbiosis between AI androbotics; that there could be no intelligencewithout embodiment (Brooks 1991). Over theyears, the event and AI Magazine have served asa venue for this and several other intellectualdebates, including sensing versus modeling,color-based versus shape-based object recogni-tion, and reactive control versus symbolicplanning for robot navigation (Balch et al.1995; Buhmann et al. 1995; Dudek 1998; Firby
Articles
SPRING 2002 13
Ten Years of the AAAI Mobile Robot
Competition and Exhibition
Looking Back and to the Future
Tucker Balch and Holly A. Yanco
Copyright © 2002, American Association for Artificial Intelligence. All rights reserved. 0738-4602-2002 / $2.00

decade of competitions has seen a mellowingof the “religious” fervor on these issues as wellas a realization among many that reactivity,planning, and representation will all play arole in the successful robots of the new millen-nium.
EvolutionThe contest immediately took on two impor-tant but apparently conflicting roles: First, itprovided a target for research in AI and robot-ics; in Pete Bonasso’s words, the event was cast“in the spirit of trying to develop as animate,responsive, and intelligent robot behavior aspossible” (Dean and Bonasso 1993). Second,the contest provided a venue where peoplecould demonstrate their work to the AI com-munity.
Contest organizers faced the challenge ofdevising compelling problems worthy ofworld-class research (and the funding that goeswith it) while balancing risk. The risk arisesfrom the danger of setting the bar so high thatno robot can complete the task. In the worstcase, critics might interpret the failure ofrobots to complete the task as a systemic failureof AI robotics itself (Konolige 1997). The con-test chairs have wrestled with these issues eversince. The competition’s evolution reflects theorganizers’ efforts to keep the bar at the rightlevel and provide relevant contest events thatinspire and drive research.
For the first contest, Bonasso and Deandesigned a competition with progressivelymore challenging trials. The contest centeredon a task where the robots were expected toexplore a large arena containing easily detectedobstacles along with conspicuously markedobjects to be located by the robots. Initial trialswere conducted behind closed doors before thegeneral public was admitted to the competi-tion hall. Thus, the judges were able to assessthe capabilities of the robots so they could tai-lor the final, public, trials for success. What asuccess it was—the 1992 competition was a bighit that ensured a place for the competition insubsequent conferences.
The competition grew to include multipleevents because some researchers found onetask or the other a better match for their fund-ed research. Since this time, the robot compe-tition has included about three problems everyyear (sometimes four, sometimes two). Overthe three years spanning 1993 to 1995, someform of navigation task was maintained, alongwith a simple manipulation task. The complex-ity of the competition tasks, however, was keptat about the same level as the first contest.
et al. 1996; Mason 1993; Miller 1993; and Sar-gent et al. 1997).
Toward the end of the 1980s, the apparentlystalled progress of symbolic AI for robot con-trol, contrasted with Brooks’s and Arkin’s suc-cessful reactive strategies, seemed to foreshad-ow a dominance of behavior-based approachesin the 1990s. In 1992, David Miller and hisson, Jacob Milstein, made the point that sym-bolic representation might not always be nec-essary with their stark robot SCARECROW (figure1). SCARECROW was controlled by a simple cir-cuit of wires and relays (no computer con-troller). Although SCARECROW didn’t win thecompetition, it did well, making some com-petitors quite nervous. Miller relishes thememory: “For at least five years after ‘92, Ireceived e-mail and letters from researchersaround the world asking for more details aboutSCARECROW’s spatial representation and plan-ning system. I would tell them its spatial repre-sentation system was 100-percent accurate andfull fidelity … the representation was quitelarge and was stored mostly off board therobot.”
In fact, robots following reactive strategiesoften claimed the winner’s circle (for example,Balch [1998]; Balch et al. [1995]). However, inother years, robots that relied on representa-tion and planning stole top honors (for exam-ple, Buhmann et al. [1995]). The end of a
Articles
14 AI MAGAZINE
Figure 1. SCARECROW, the Robot That Didn't Have a Brain, in the 1992 Competition.

Another aspect of the contest that hasevolved over the years bears mentioning. Thetypes of participants have changed over theyears. In the early 1990s, a large portion of thecompetitors came from research universitiessuch as Carnegie Mellon University (CMU),Stanford University, Georgia Institute of Tech-nology, and the Massachusetts Institute ofTechnology. The entries from these universitiesoften reflected the research of Ph.D. studentsand their advisers. In the mid to late 1990s, themix of participants evolved to include a largerproportion of undergraduates from a broaderselection of universities, including teachingcolleges such as Swarthmore. This trend prob-ably reflects the pervasiveness and accessibilityof AI and robotics technologies. Recently, withthe addition of new events, we are seeingresearch universities return to the competition.
“Where is the science?”—Tom Dean, 1994
“The science is what you do [back at thelab but] throw away the night before thecompetition.”—Jim Firby, 1994
The robots were providing an exciting show,but the researchers were still struggling to buildrobust systems that would convincingly com-plete the competition tasks (Simmons 1995).According to Tom Dean, one consequence ofpromoting such competitions, and their collo-cation with scientific conferences, is that theorganizers and participants were constantlyasked to explain the science under the hood,by peers, fellow conference attendees, the pow-ers that sponsor such events (Defense Ad-vanced Research Projects Agency, National Sci-ence Foundation, National Aeronautics andSpace Administration, AAAI, InternationalJoint Conferences on Artificial Intelligence),and the press. “Indeed,” Dean says, “I wasoften placed in the position of ‘spinning’ com-ments made by participants that were pickedup by the press to the effect that the real com-petitive advantage was a result of finessingtough problems, taking advantage of loopholesin the rules, and last minute hacks.”2 Conse-quently, Dean took it on himself to play devil’sadvocate and challenge the community toexplain their contributions to science, engi-neering, and society. With regard to Firby’squip, Dean said, “I’m sure that elegance suf-fered in the dark dawn prior to the final roundsof several competitions … but Jim’s achieve-ments were still due in large part to a deepunderstanding of very basic principles andyears of hard-won experience cached out inwell-designed systems.”3
Then, in 1995, the community reached animportant milestone. According to David
Miller, that year’s organizer, “All the robotsthat competed in the events accomplished thetasks” (Hinckle, Kortenkamp, and Miller 1996).The successes of 1995 were enabled by corre-sponding research progress in the technologyareas the contest was pushing, including theovercoming of ultrasonic sensor noise for nav-igation, the building of maps from noisy rangesensors, real-time vision, and planning in amore or less structured environment.
The year 1996 marked a move to moredynamic and unstructured tasks (Kortenkamp,Nourbakhsh, and Hinkle 1997). The TennisCourt Cleanup task required robots to collectnumerous tennis balls strewn about the arenaand deposit them in a bin. The problem wasfurther complicated by the addition of battery-powered, quickly moving “squiggle balls” thatalso had to be captured and delivered to a bin.One of the competitors, M1 from Newton Labs(figure 2), was able to chase a squiggle balldown and capture it. This competition waschallenging and visually appealing as well. Italso brought the reactive versus deliberativecontrol debate to the fore; of the two topentries, M1 from Newton Labs was purely reac-tive, and JEEVES from CMU used symbolic rea-soning.
Others outside the community were takingnote of the competition’s success. Pete Bonassorecalls, “Some of my favorite recollections wereseeing people like Ian Horswill, Maja Mataric,and Jon Connell having to patiently explain toCNN and other press reps that there really wasno one behind the curtain.”4 In 1996, the PBStelevision show Scientific American Frontiersasked if it could visit and tape the contest. Theshow’s host, Alan Alda, attended the competi-tion in Portland, Oregon, and spent manyhours observing and asking questions with hiscamera crew. The resulting program presentedAI robotics in a very positive light.
By 1997, the robots were reliable enoughthat another research challenge could beadded. The Hors d’Oeuvres, Anyone? eventdebuted in that year’s competition. The gener-al idea was to have robots serve food to atten-dees at the conference’s banquet. This compe-tition would drive research in manipulation;navigation in dynamic environments (forexample, crowds of people); and, most notably,human-robot interaction. Because evaluationfor scoring included an audience vote compo-nent, robots were rewarded for compellinginteraction with people.
In addition to motivating research withinthe AAAI community, the competition has hada strong impact on AI robotics research outsidethe competition arena. Two of the most visible
Articles
SPRING 2002 15
… the eventwas cast “inthe spirit oftrying todevelop asanimate,responsive,andintelligentrobotbehavior aspossible” ….

(for example, the Office Delivery task) played aprominent role in the robot competition fromthe first contest through 1998. In 1999, howev-er, the organizers deemed this problem solvedand dropped it from the competition. At aboutthe same time, some felt the competition haddrifted from its original objective of showcas-ing and driving AI robotics research. It seemedthat robots participating (and winning) hadshifted from “state of the research” to “state ofthe art.” In other words, the competitors werebuilding their robots by integrating proventechnologies; they weren’t being forced todevelop new technology. At the same time,graduate student teams demonstrating theirthesis research were being supplanted byundergraduate students demonstrating theirengineering skills.
These observations led to the developmentof a new event, the Mobile Robot Challenge.The intent of this event is to set the bar againat an appropriate level to draw cutting-edgeresearch back to the contest. The challenge taskis to develop a robot that can attend theNational Conference on AI and present a talkabout itself. Components of the probleminclude human-robot interaction, navigationin dynamic environments with and without amap, and accepting and scheduling of priori-tized subtasks (for example, “please take thispaper to the registration desk”). To date, thechallenge has drawn only a few participants incomparison to the other events, but there areindications participation will increase for 2002.
Perhaps the most exciting recent change inthe Robot Competition was the addition in2000 of a Robot Rescue event. The task forrobots in this event is to explore an arena thatsimulates a postearthquake environment forsurviving humans. The rather sizable arena forthis event was designed by Adam Jacoff and histeam at the National Institute of Standards andTechnology. The relevance of research in thisarea was brought home by the events of Sep-tember 11, 2001. We expect substantial growthin this event over the next few years.
The ExhibitionSince the first year of the event, the exhibitionhas been a forum for robotics demonstrationsthat fall outside the year’s specified competi-tion tasks. In the early years, when most of thecompetition tasks involved solving indoornavigation, people interested in other areas ofrobotics research found a place to bring theirwork. The first year, the event was actuallycalled the AAAI Robot Exhibition and Compe-tition, putting the exhibition of robots ahead
examples include the tour-guide robots devel-oped by Illah Nourbakhsh’s group and Sebast-ian Thrun’s group (Thrun et al. 2000; Nour-bakhsh et al. 1999]. According to Thrun, “ourtour-guide work was clearly strongly motivatedby similar tasks in the mobile robot competi-tion—in fact, without the competition, wewould never have had the resources to do themuseum tour-guide work.”5 Research in robot-ic rescue is another example. The AAAI MobileRobot Competition hosted rescue competi-tions in 2000 and 2001 (Schultz 2001). Some ofthe same robots that participated in theseevents were used to explore the rubble at theWorld Trade Center site in September 2001.6
Variations on maze-navigation problems
Articles
16 AI MAGAZINE
Figure 2. Tennis Anyone? Newton Labs' Home-Built Entry, M1, in the 1996 Clean Up the Tennis Court Event.
Newton Labs tied with JEEVES from Carnegie Mellon for first place in the event.

Articles
SPRING 2002 17
of the competitive aspects (Dean and Bonasso1995).
Most frequently, the exhibitions have beengiven by graduate students, who bring theirlatest work to the event. In the first year, theexhibitors jumped into the ring whenever thecompetition wasn’t going on; in later years, theexhibition has had rings of its own for demon-strations. The program has expanded over theyears to include posters and video loops as wellas live demonstrations, allowing people withnontraveling robots to participate. In 1997, theevent gained its own chair, resulting in largerexhibitions.
The wide variety of systems that have beendemonstrated in the past include roboticwheelchairs (figure 3), robotic sculptures, one-legged hopping robots, tubelike rolling robots,“dramatic robots,” prototypes for Mars rovers,and humanoid robots as well as the more typ-ical looking research robots. The exhibition hasserved as a forum for researchers to givedemonstrations of their latest work, sharingresearch more quickly with the community.The spirit of open discussion of the research ispresent in all the events and is further encour-aged at the Robot Workshop held at the end ofthe competition and exhibition.
A great deal of cutting-edge research has beenpresented at the exhibition, including the fol-lowing systems: The first exhibition in 1992 wasthe site for the first demonstration of robots thatlearned languages for communication (Yancoand Stein 1993). In 1994, the exhibition washost to the first 1000-pound autonomous hov-ercraft from the University of Maryland. In1995, Dave Miller’s enthusiasm resulted in thedemonstration of several robotic wheelchairsystems in Montreal. To add a small bit of com-petition to this exhibition, the wheelchairscompeted in a “doorway limbo.” At the exhibi-tion in 1997, Robin Murphy demonstrated herlab’s research on robotics for urban search andrescue (which then debuted as a competition in2000). Also in 1997, speech and gesture recogni-tion for human-robot interaction were demon-strated on COYOTE (figure 4) from the NavalResearch Laboratories (Perzanowski, Adams,and Schultz 1998). In 1998, Kurt Konolige(1997) demonstrated his SMALL VISION SYSTEM, asmall, compact stereo head.
At the 2001 exhibition, the Nils NilssonPrize for Integrating AI Technologies wasawarded to an exhibition participant: CEREBUS
from Northwestern University. CEREBUS gave aninteractive talk about itself to interestedpassersby. This talk was the hit of the RobotWorkshop that followed the Robot Competi-tion and Exhibition. (See the article by Adams
Figure 3. The First Robotic Wheelchair Commanded by an Eye-TrackingDevice, Shown at the 1997 Exhibition: WHEELESLEY from MIT
with EAGLEEYES from Boston College.
and Verma, also in this issue, for further infor-mation on the research behind CEREBUS.)
The 2001 CompetitionThe Tenth Annual AAAI Mobile Robot Com-petition and Exhibition was held at the Sev-enteenth International Joint Conference onArtificial Intelligence (IJCAI-2001) in Seattle,Washington. The events included two com-petitions—Hors d’Oeuvres, Anyone? andRobot Rescue (held in conjunction withRoboCup-2001)—and a well-attended exhibi-tion. We also welcomed the National BotballTournament again this year in the AAAI exhi-bition hall, even experiencing cross-overwhen a high school student demonstrated asnake robot called SLITHER that he had builtwith his father.
Articles
18 AI MAGAZINE
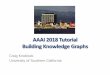
CARMEL, University of Michigan, the Winner of the First AAAI Robot
Competition.
XAVIER, Carnegie Mellon University, Took Second Place in the
1993 Office Delivery Event.
GANYMEDE, IO, and CALLISTO from Georgia Tech, the Winner of the 1994 Office Cleanup Event.
Brown University's RAMONA in the 1997 Find Life on Mars Event.
Korea Advanced Institute of Science and Tech-nology’s CAIR-2 Won the
1995 Office Delivery Event.
University of Bonn’s RHINO
Won Second Place in the1994 Office Cleanup Event.
The Competition Over the Years

Articles
SPRING 2002 19
The Robotic Love Triangle from Brandeis University, the
Crowd-Pleasing Winner of the First Hors d'Oeuvres Anyone? Competition Held in 1997.
The University of New Mexico’s LOBOTOMOUS
Won the Once-a-Week Cleaning Contest in the 1997 Home Vacuum Event.
OfficeBoy2000(OB2K) fromCarnegie Mellon Uni-versity Was One ofOnly Two Entries inthe First Robot Chal-lenge Event Held in1999. The OtherEntry was Foof Fromthe University ofSouthern California.
Alfred the PenguinButler from Swarth-more College TookFirst Place in the1999 Hors d'Oeuvres,Anyone? Event.
The University of South Florida in the First Robot Rescue Competition at AAAI in 2000.

Articles
20 AI MAGAZINE
KLUDGE from Northwestern University PlayedFetch with the Crowd at AAAI-97.
The 1994 Exhibition Was Host to the AIRS Hov-ercraft Robot from the University of Maryland.
Robots for Urban Search and Rescue Made Their First Appearance at AAAI in the 1997 Exhibition:
SILVER BULLET and BUJOLD from the Colorado School of Mines.
SUBOT, a Highly Maneuverable Spherical Robot from Space Applications
International Corporation, Was Demonstrated at the 1999 Exhibition.
The Exhibition Over the Years

The winners of this year’s events are given infigure 5. See the articles in this issue for discus-sions of the events and the research approach-es of the participants.
Toward the FutureAs of this writing, the slate of events for the2002 AAAI Mobile Robot Competition andExhibition is still under discussion. This discus-sion, informed by our look back over the last10 years, has led us to reflect on the objectivesof the competition. Whatever the originalobjectives were, it has grown to become manymore things to many people. For example,although we don’t see as much cutting-edgeresearch at the competition as we would like,we see many, many motivated and excitedundergraduates building successful robots.Thus, in any realignment of objectives andcomponent events, we want to be sure we pre-serve what is right with the competition.
There is no question that the AAAI MobileRobot Competition and Exhibition should pro-mote and showcase AI robotics: those aspectsof robotics that require AI and those aspects ofAI that enable successful robotics. However,the competition should also inspire andinvolve undergraduate students and provide avenue for graduate students to demonstratetheir work. We feel these multiple goals can bemet by providing several events that target dif-ferent groups.
The Robot Rescue event will certainly beincluded because it offers a wide range ofresearch challenges as well as extraordinary rel-evance in these times. The Hors d’Oeuvres,Anyone? and challenge events have been theprimary drivers of human-robot interactionresearch over the last few years. Both RobotRescue and Hors d’Oeuvres, Anyone? offerentry-level possibilities for undergraduates yetoffer a deep enough problem that graduate stu-dents and researchers in the area will findinteresting problems to solve. However, theoverlap of human-robot interaction in Horsd’Oeuvres, Anyone? and the challenge suggeststhat we might find a way to combine the twointo a new competition that could drive thefield even farther.
This leaves us with the opportunity to estab-lish a new event.... What will it be?
AcknowledgmentsThanks to the Defense Advanced Research Pro-jects Agency (DARPA), the Naval Research Lab,and Nils Nilsson for supporting the 2001event. John Blitch, Doug Gage, Jim Hendler,Jean Schultz, and Mark Swinson at DARPA
have provided critical advice and support thisyear and in the past. ActivMedia, iRobot, andProbotics donated robots at cost for prizes thisyear. The authors thank Tom Dean, Pete Bonas-so, David Miller, Reid Simmons, and AlanSchultz for their recollections. The AI commu-nity owes a debt to the AAAI Mobile Robot
Articles
SPRING 2002 21
Nils Nilsson Award for Integrating Artificial Intelligence Technologies
CEREBUSNorthwestern University
Robot RescueTechnical Award for
Artificial Intelligence for RescueSwarthmore College
Technical Award for Advanced Mobility for Rescue
Sharif University
Hors d’Oeurves, Anyone?First Place:
University of British Columbia
Second Place (Tie):Swarthmore College and Seattle Robotics Club
Third Place:Universidad de Aveiro
Figure 5. The List of Winners from the 2001 AAAI Mobile Robot Competition and Exhibition.
Figure 4. COYOTE,from the Navy Centerfor Applied Research
in AI, Uses Speechand Gesture
Recognition forHuman-Robot
Interactionat the 1999 Exhibition.

Adaptive Behavior, eds. J.-A. Meyer, H. L.Roitblat, and S. W. Wilson, 478–485. Cam-bridge, Mass.: The MIT Press.
Tucker Balch is an assis-tant professor of com-puting at the GeorgiaInstitute of Technologyand an adjunct researchscientist at Carnegie Mel-lon University’s RoboticsInstitute. Balch has par-ticipated in the AAAI
Mobile Robot Competition and Exhibitionsince 1993. His robots took first place in1994 and 1997; he organized the robotexhibition in 1998; and he cochaired theoverall competition in 2001. Balch willagain cochair the competition and exhibi-tion in 2002. Balch has published over 60journal and conference papers in AI androbotics. His book, Robot Teams (A. K.Peters) (edited with Lynne Parker), willappear in 2002. His e-mail address is [email protected].
Holly Yanco is an assis-tant professor in theComputer Science De-partment at the Univer-sity of Massachusetts atLowell. She earned herM.S. and Ph.D. from theMassachusetts Instituteof Technology in 1994
and 2000. She has taught at Wellesley Col-lege, Boston College, and ArsDigita Univer-sity. Her research interests include ad-justable autonomy, assistive technology,multiple robot teams, and human-robotinteraction. She is a coeditor of the bookLecture Notes in Artificial Intelligence: Assis-tive Technology and Artificial Intelligence.Yanco exhibited her communicating ro-bots, BERT and ERNIE, at the first AAAI RobotCompetition and Exhibition in 1992 andexhibited her research in several of the fol-lowing years. She organized the robot exhi-bition in 1997, chaired the Robot Rescueevent in 2001, and cochaired the overallevent in 2001. In 2002, she will againcochair the AAAI Robot Competition andExhibition. Her e-mail address is [email protected].
1996. The 1995 Robot Competition andExhibition. AI Magazine 17(1): 31–45.
Konolige, K. 1997. Small Vision Systems:Hardware and Implementation. Paper pre-sented at the Eighth International Sympo-sium on Robotics Research, 3–7 October,Hayama, Japan.
Konolige, K. 1994. Designing the 1993Robot Competition. AI Magazine 15(1):57–62.
Kortenkamp, D.; Nourbakhsh, I.; and Hin-kle, D. 1997. The 1996 AAAI Mobile RobotCompetition and Exhibition. AI Magazine18(1): 25–32.
Mason, M. T. 1993. Kicking the SensingHabit. AI Magazine 14(1): 58–59.
Meeden, L.; Schultz, A.; Balch, T.; Bhargava,R.; Haigh, K. Z.; Bohlen, M.; Stein, C.; andMiller, D. 2000. The AAAI 1999 MobileRobot Competition and Exhibition. AIMagazine 21(3): 69–78.
Miller, D. P. 1993. A Twelve-Step Programto More Efficient Robotics. AI Magazine14(1): 60–63.
Murphy, R. R. 2000. Using Robot Competi-tions to Promote Intellectual Development.AI Magazine 21(1): 77–90.
Nourbakhsh, I.; Bobenage, J.; Grange, S.;Lutz, R.; Meyer, R.; and Soto, A. 1999. AnAffective Mobile Educator with a Full-TimeJob. Artificial Intelligence 114(1–2): 95–124.
Perzanowski, D.; Adams, W.; and Schultz,A. 1998. Communicating with a Semi-Autonomous Robot. In Workshop on Inte-grating Robotics Research: Taking the NextLeap, 55–59. AAAI 1998 Spring SymposiumSeries. Menlo Park, Calif.: AAAI Press.
Sargent, R.; Bailey, B.; Witty, C.; andWright, A. 1997. Dynamic Object CaptureUsing Fast Vision Tracking. AI Magazine18(1): 65–72.
Schultz, A. C. 2001. The 2000 AAAI MobileRobot Competition and Exhibition. AIMagazine 22(1): 67–72.
Simmons, R. 1995. The 1994 AAAI RobotCompetition and Exhibition. AI Magazine16(2): 19–30.
Thrun, S.; Beetz, M.; Bennewitz, M.; Bur-gard, W.; Cremers, A. B.; DellaerT, F.; Fox,D.; Haehnel, D.; Rosenberg, C.; Roy, N.;Schulte, J.; and Schulz, D. 2000. Probabilis-tic Algorithms and the Interactive MuseumTour-Guide Robot MINERVA. InternationalJournal of Robotics Research 19(11): 972–999.
Yanco, H. A. 1998. The 1997 AAAI MobileRobot Exhibition. AI Magazine 19(3):39–47.
Yanco, H. A., and Stein, L. A. 1993. AnAdaptive Communication Protocol forCooperating Mobile Robots. In From Ani-mals to Animats 2: Proceedings of the SecondInternational Conference on the Simulation of
Competition and Exhibition chairs:Tom Dean and Pete Bonasso (1992);Kurt Konolige and Terry Weymouth(1993); Reid Simmons (1994); DavidMiller (1995); David Kortenkamp,Illah Nourbakhsh, and David Hinkle(1996); Ron Arkin (1997); Robin Mur-phy, Gregory Dudek, and David Kor-tenkamp (1998); and Alan Schultz(1999, 2000). Finally, the competitionis made possible every year throughthe hard work of the American Associ-ation for Artificial Intelligence staff,especially Carol Hamilton, Keri Har-vey, and Richard Skalsky.
Note1. Pete Bonasso, personal communication.
2. Tom Dean, personal communication.
3. Tom Dean, personal communication.
4. Pete Bonasso, personal communication.
5. Sebastian Thrun, personal communica-tion.
6. Center for Robot-Assisted Search andRescue web site, www.csee.usf.edu/robot-ics/crasar/.
BibliographyBalch, T.; Boone, G.; Collins, T.; Forbes, H.;MacKenzie, D.; and Santamaria, J. C. 1995.“IO, GANYMEDE, and CALLISTO—A MultiagentRobot Trash-Collecting Team. AI Magazine16(2): 39–51.
Balch, T. 1998. Profile of a Winner: GeorgiaTech. AI Magazine 19(3): 23.
Bonasso, P., and Dean, T. 1997. A Retrospec-tive of the AAAI Robot Competitions. AIMagazine 18(1): 11–23.
Brooks, R. A. 1991. Intelligence withoutReason. In Proceedings of the Twelfth Inter-national Joint Conference on ArtificialIntelligence, 569–595. Menlo Park, Calif.:International Joint Conferences on Artifi-cial Intelligence.
Buhmann, J. M.; Burgard, W.; Cremers, A.B.; Fox, D.; Hofmann, T.; Schneider, F. E.;Strikos, J.; and Thrun, S. 1995. The MobileRobot RHINO. AI Magazine 16(2): 31–38.
Dean, T., and Bonasso, R. P. 1992. The 1992AAAI Robot Exhibition and Competition.AI Magazine 14(1): 34–48.
Dudek, G. 1998. Profile of a Winner: McGillUniversity. AI Magazine 19(3): 21.
Firby, J.; Prokopowicz, P. N.; Swain, M. J.;Kahn, R. E.; and Franklin, D. 1996. Pro-gramming CHIP for the IJCAI-95 RobotCompetition. AI Magazine 17(1): 71–81.
Haigh, K. Z., and Balch, T. 2000. AAAI-98Robot Exhibition. AI Magazine 21(1):67–76.
Hinkle, D.; Kortenkamp, D.; and Miller, K.
Articles
22 AI MAGAZINE