Embed Size (px)
Citation preview
Technical Communication Skills
Practicum (TCSP)
Presented by Nuhairi & Azad
Team 10: “Hazard Rover”
2/21/2007
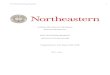
HAZARD ROVERHAZARD ROVER
At-A-Glance:At-A-Glance:– Web-based Wi-Fi control interfaceWeb-based Wi-Fi control interface– Wireless webcam streams video to Wireless webcam streams video to
websitewebsite– Capabilities:Capabilities:
MovementMovement Light sensor/LEDLight sensor/LED Robotic ArmRobotic Arm
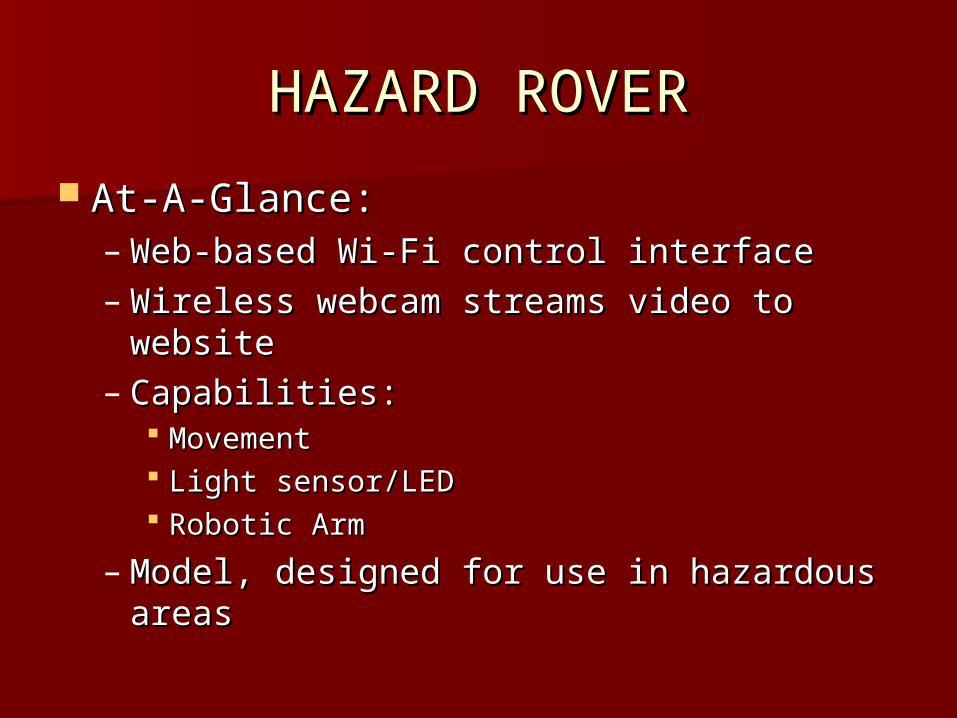
– Model, designed for use in hazardous Model, designed for use in hazardous areasareas
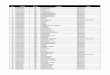
HAZARD ROVERHAZARD ROVER
SCHEMATICSCHEMATIC
six different subsystems: Power Supply (P), Sensors (S), Motor Control (D), Microcontroller (M), Wi-Fi Interface (F), and Webcam (W)

OVERALL SCHMEMATICOVERALL SCHMEMATIC
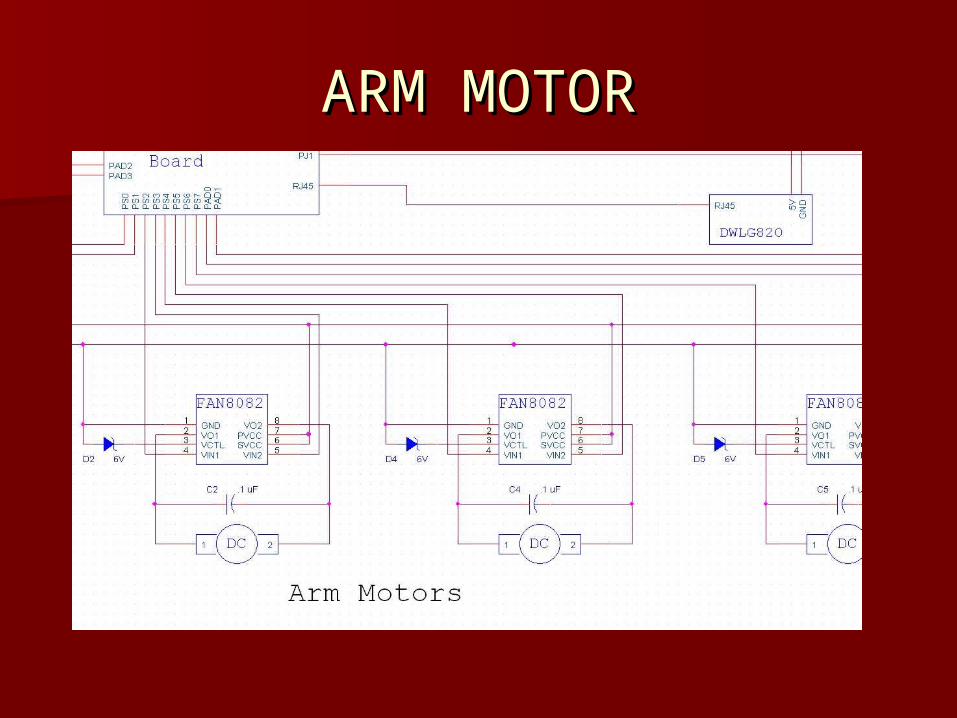
ARM MOTORARM MOTOR
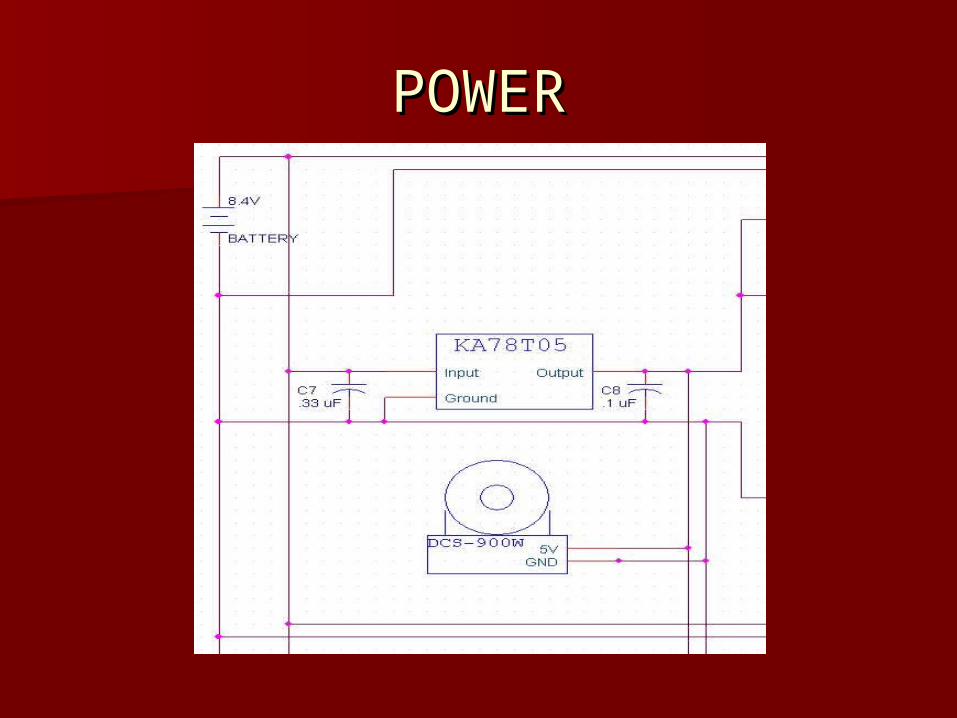
POWERPOWER

CAMERA SERVOCAMERA SERVO
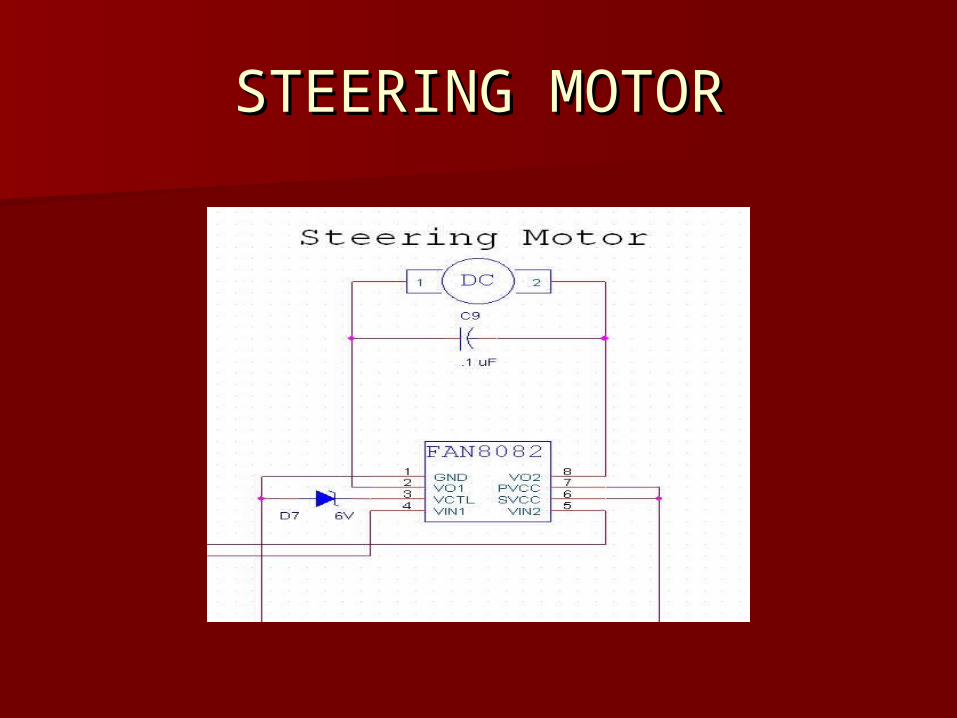
STEERING MOTORSTEERING MOTOR

STEERING SENSORSTEERING SENSOR
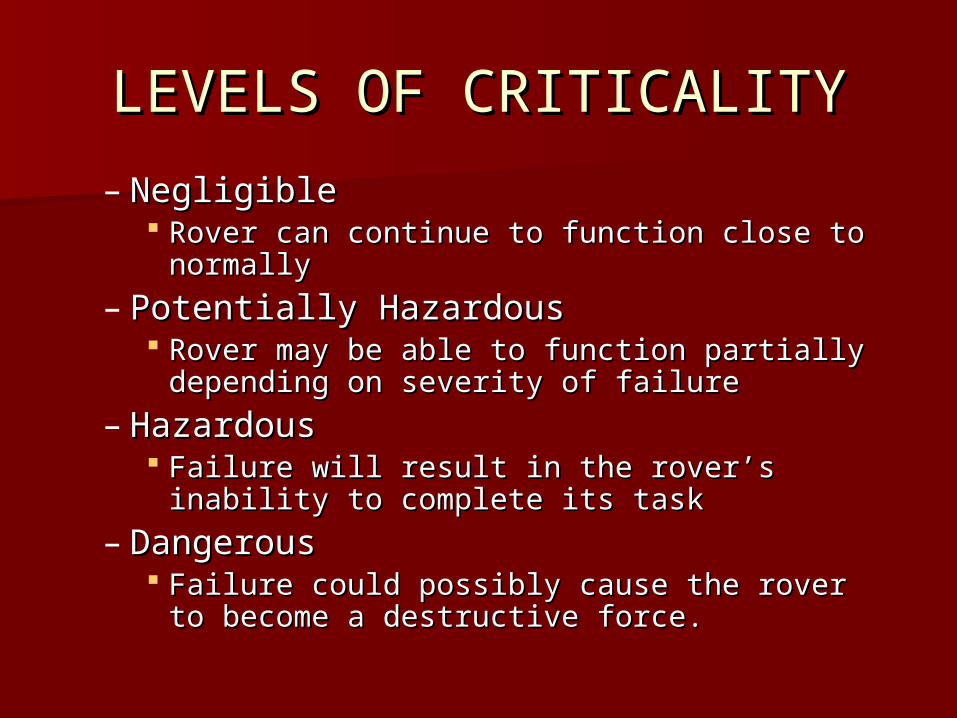
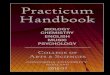
LEVELS OF CRITICALITYLEVELS OF CRITICALITY
– NegligibleNegligible Rover can continue to function close to Rover can continue to function close to
normallynormally
– Potentially HazardousPotentially Hazardous Rover may be able to function partially Rover may be able to function partially
depending on severity of failuredepending on severity of failure
– HazardousHazardous Failure will result in the rover’s inability to Failure will result in the rover’s inability to
complete its taskcomplete its task
– DangerousDangerous Failure could possibly cause the rover to Failure could possibly cause the rover to
become a destructive force.become a destructive force.
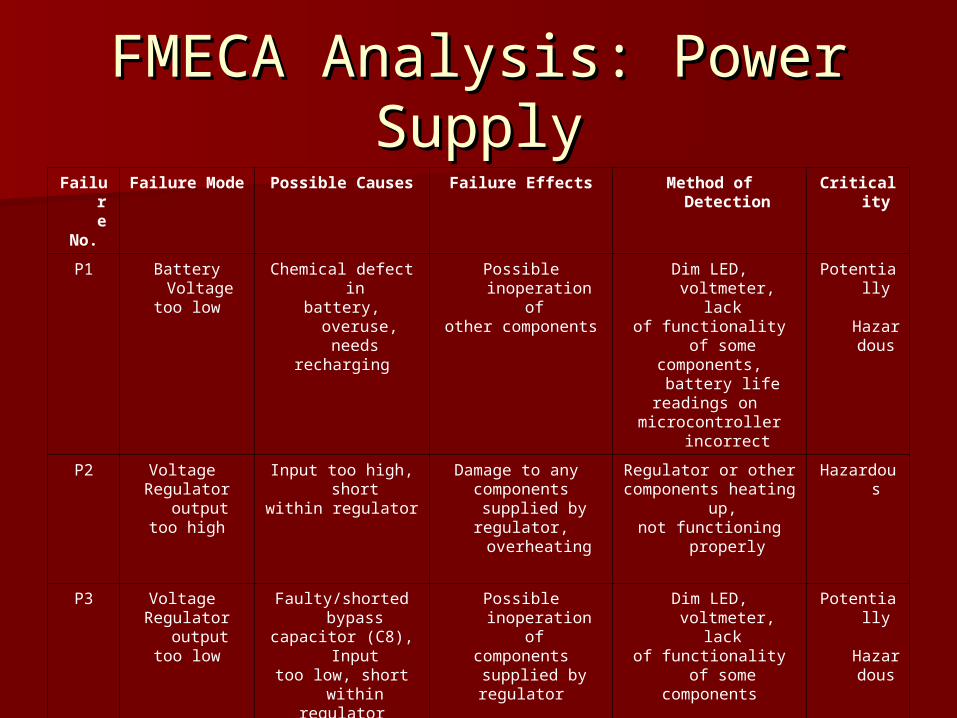
FMECA Analysis: Power FMECA Analysis: Power SupplySupply
Failure No.
Failure Mode Possible Causes Failure Effects Method of Detection Criticality
P1 Battery Voltage too low
Chemical defect in battery, overuse, needs
recharging
Possible inoperation of other components
Dim LED, voltmeter, lack of functionality of some components, battery life
readings on microcontroller incorrect
Potentially Hazardous
P2 Voltage Regulator output
too high
Input too high, short within regulator
Damage to any components supplied by
regulator, overheating
Regulator or other components heating up, not functioning properly
Hazardous
P3 Voltage Regulator output
too low
Faulty/shorted bypass capacitor (C8), Input too low, short within
regulator
Possible inoperation of components supplied by
regulator
Dim LED, voltmeter, lack of functionality of some
components
Potentially Hazardous
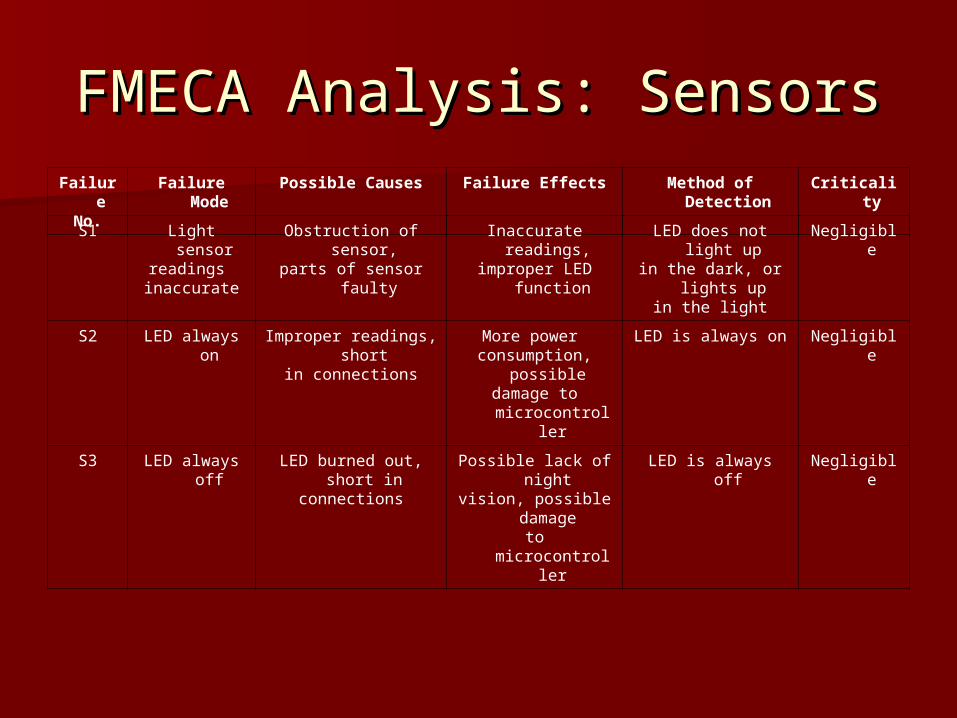
FMECA Analysis: SensorsFMECA Analysis: SensorsFailure
No.Failure Mode Possible Causes Failure Effects Method of Detection Criticality
S1 Light sensor readings inaccurate
Obstruction of sensor, parts of sensor faulty
Inaccurate readings, improper LED function
LED does not light up in the dark, or lights up
in the light
Negligible
S2 LED always on Improper readings, short in connections
More power consumption, possible
damage to microcontroller
LED is always on Negligible
S3 LED always off LED burned out, short in connections
Possible lack of night vision, possible damage
to microcontroller
LED is always off Negligible
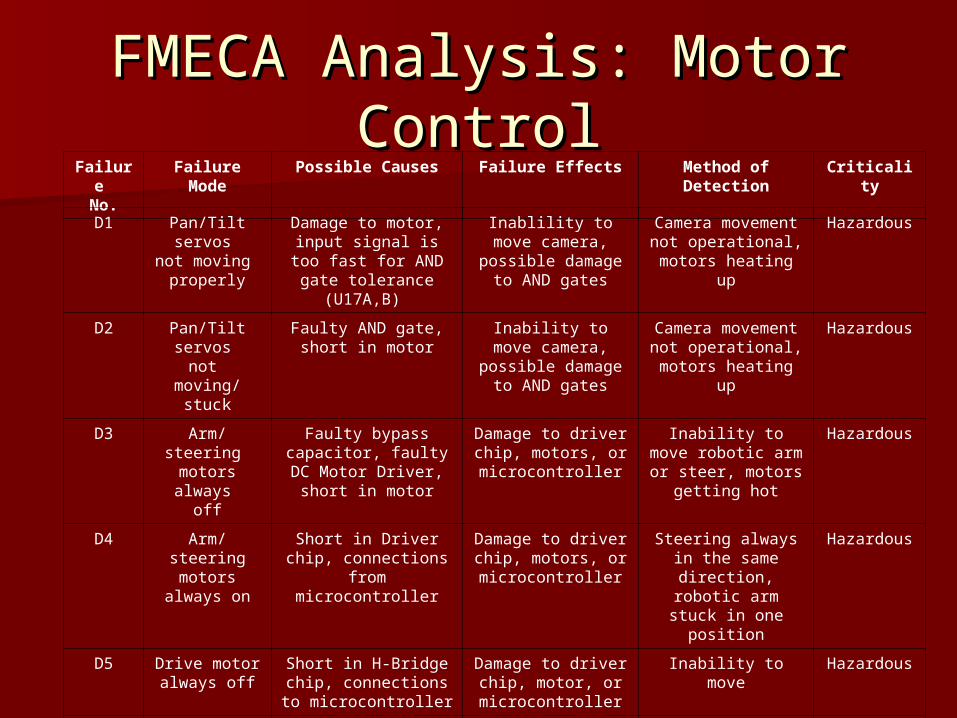
FMECA Analysis: Motor FMECA Analysis: Motor ControlControl
Failure No.
Failure Mode Possible Causes Failure Effects Method of Detection Criticality
D1 Pan/Tilt servos not moving
properly
Damage to motor, input signal is too fast for AND gate tolerance (U17A,B)
Inablility to move camera, possible
damage to AND gates
Camera movement not operational, motors
heating up
Hazardous
D2 Pan/Tilt servos not
moving/stuck
Faulty AND gate, short in motor
Inability to move camera, possible
damage to AND gates
Camera movement not operational, motors
heating up
Hazardous
D3 Arm/steering motors always
off
Faulty bypass capacitor, faulty DC Motor Driver,
short in motor
Damage to driver chip, motors, or
microcontroller
Inability to move robotic arm or steer, motors getting hot
Hazardous
D4 Arm/steering motors always
on
Short in Driver chip, connections from microcontroller
Damage to driver chip, motors, or
microcontroller
Steering always in the same direction, robotic
arm stuck in one position
Hazardous
D5 Drive motor always off
Short in H-Bridge chip, connections to microcontroller
Damage to driver chip, motor, or
microcontroller
Inability to move Hazardous
D6 Drive motor always on
Short in H-Bridge chip, connections to microcontroller
Damage to driver chip, motor, or
microcontroller
Inability to stop or control rover
Dangerous
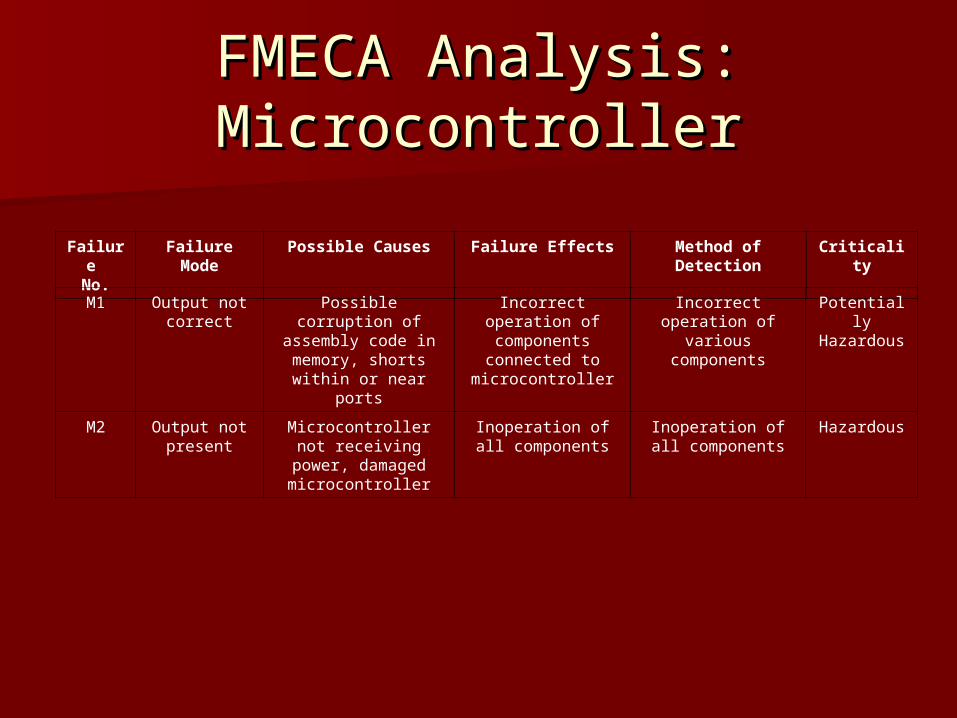
FMECA Analysis: FMECA Analysis: MicrocontrollerMicrocontroller
Failure No.
Failure Mode Possible Causes Failure Effects Method of Detection Criticality
M1 Output not correct
Possible corruption of assembly code in memory, shorts within or near ports
Incorrect operation of components connected
to microcontroller
Incorrect operation of various components
Potentially Hazardous
M2 Output not present
Microcontroller not receiving power, damaged
microcontroller
Inoperation of all components
Inoperation of all components
Hazardous
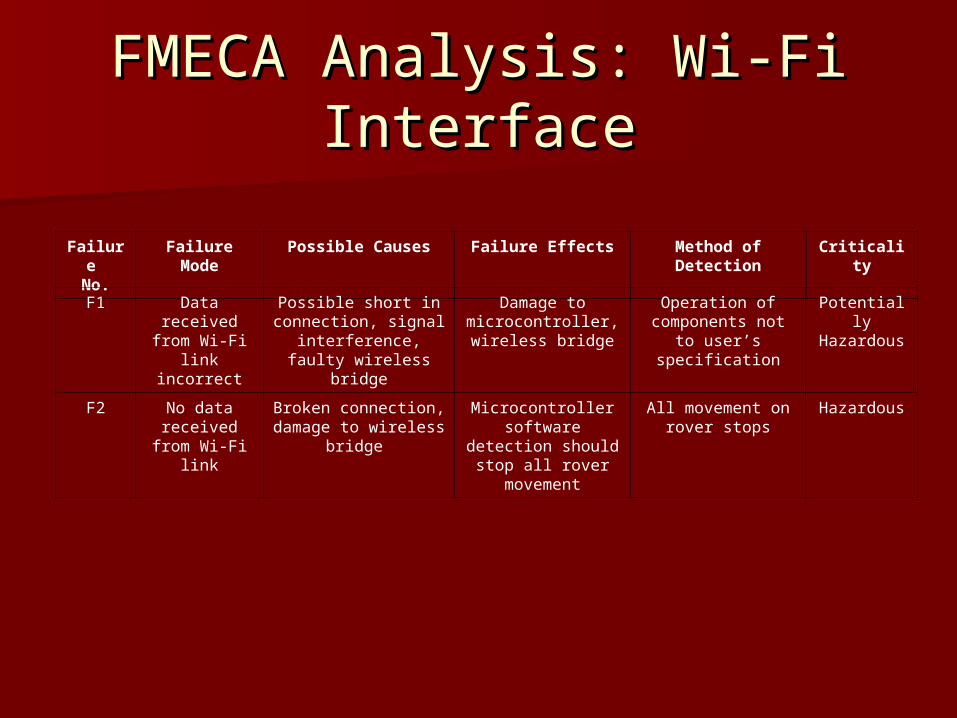
FMECA Analysis: Wi-Fi FMECA Analysis: Wi-Fi InterfaceInterface
Failure No.
Failure Mode Possible Causes Failure Effects Method of Detection Criticality
F1 Data received from Wi-Fi link
incorrect
Possible short in connection, signal interference, faulty
wireless bridge
Damage to microcontroller, wireless bridge
Operation of components not to user’s specification
Potentially Hazardous
F2 No data received from Wi-Fi link
Broken connection, damage to wireless bridge
Microcontroller software detection
should stop all rover movement
All movement on rover stops
Hazardous
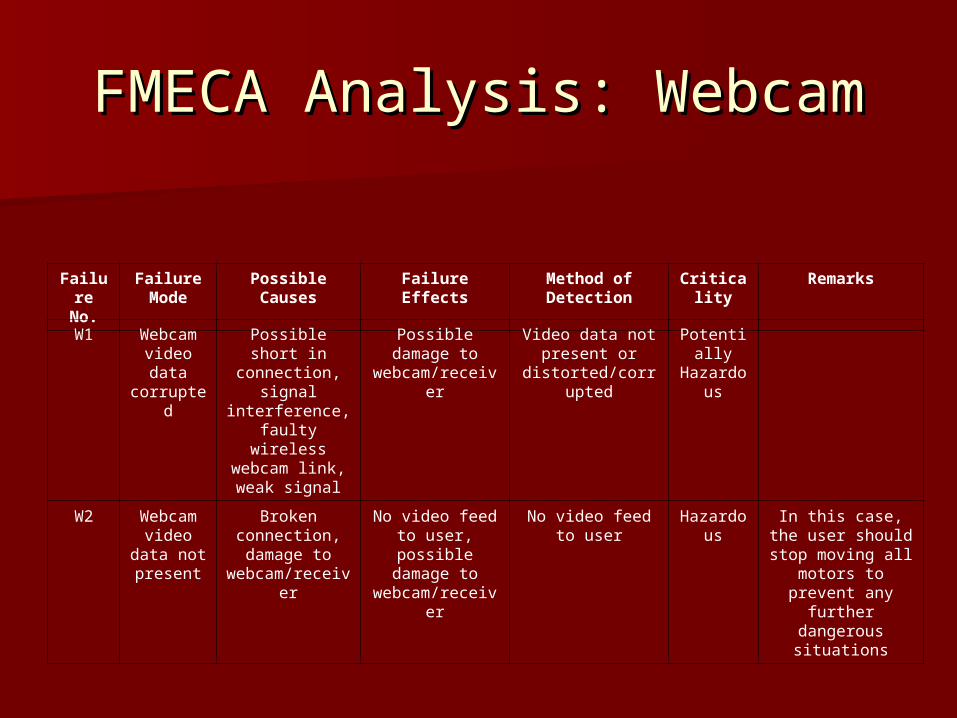
FMECA Analysis: WebcamFMECA Analysis: Webcam
Failure No.
Failure Mode
Possible Causes Failure Effects Method of Detection Criticality Remarks
W1 Webcam video data corrupted
Possible short in connection, signal interference, faulty wireless webcam link, weak signal
Possible damage to webcam/receiver
Video data not present or
distorted/corrupted
Potentially Hazardous
W2 Webcam video data not present
Broken connection, damage to
webcam/receiver
No video feed to user, possible
damage to webcam/receiver
No video feed to user Hazardous In this case, the user should stop moving all motors to prevent any
further dangerous situations