Embed Size (px)
Citation preview

navitusbaywindpark.co.uk
TECHNICAL APPENDIX
VOLUME B - OFFSHORE CHAPTER 11 - MARINE MAMMALS APPENDIX 11.3 - STATIC ACOUSTIC MONITORING FOR
HARBOUR PORPOISES AND DOLPHINS IN AND AROUND THE PROPOSED NAVITUS BAY OFFSHORE WIND PARK USING C-PODS
DOCUMENT 6.2.2.11.3
APRIL 2014

Navitus Bay Wind Park
Environmental Statement
This document has been prepared to provide information in respect of the proposed Navitus
Bay Wind Park and for no other purpose.
In preparation of this document Navitus Bay Development Limited and their subcontractors
have made reasonable efforts to ensure that the content is accurate, up to date and complete
for the purpose for which it has been prepared.
Other than any liability detailed in the contracts between the parties for this work. neither
Navitus Bay Development Limited or their subcontractors shall have any liability for any loss,
damage, injury, claim, expense, cost or other consequence arising as a result of use or
reliance upon any information contained in or omitted from this document.
© Copyright Navitus Bay Development Limited 2014
Technical Appendix

STATIC ACOUSTIC MONITORING FOR
HARBOUR PORPOISES AND DOLPHINS IN
AND AROUND THE PROPOSED NAVITUS
BAY OFFSHORE WIND PARK USING C-PODS
DR. CORMAC BOOTH & CLAIRE LACEY
Date: 10th March 2014
Report Code: SMRUL-ENO-2013-015
This report is to be cited as: Booth, C.G. & Lacey, C. (2014). “Static acoustic monitoring for harbour
porpoise and dolphins in and around the proposed Navitus Bay offshore wind park using C-PODs.”
SMRU Ltd report number (SMRUL-ENO-2013-015). March, 2014 (unpublished).
Approved by: Carol Sparling

CONTENTS
1 Summary.................................................................................................................................................... 3
2 Introduction ............................................................................................................................................... 4
2.1 Site Location .......................................................................................................................................... 4
2.2 Passive Acoustic Monitoring & C-PODs ................................................................................................. 5
3 Methods .................................................................................................................................................... 7
3.1 Deployment Details ............................................................................................................................... 7
3.2 Click detection ..................................................................................................................................... 10
3.3 Analysis – Dolphin data ....................................................................................................................... 10
3.4 Analysis – Porpoise data ..................................................................................................................... 10
3.4.1 Candidate covariates ...................................................................................................................... 11
3.4.2 Survey covariates ............................................................................................................................ 12
3.4.3 Biological/Geographic covariates ................................................................................................... 12
3.4.4 Investigating collinearity ................................................................................................................. 13
3.4.5 Model selection .............................................................................................................................. 13
4 Results ..................................................................................................................................................... 14
4.1 Detection rates .................................................................................................................................... 14
4.1.1 Dolphins .......................................................................................................................................... 14
4.1.2 Harbour porpoise ............................................................................................................................ 15
4.1.2.1 Fitted relationships and the relative importance of each covariate ........................................... 16
4.1.2.2 The (minor) effect of Latitude ..................................................................................................... 17
4.2 C-POD Performance ............................................................................................................................ 18
4.2.1 Effect of noisy environment ........................................................................................................... 18
5 Discussion ................................................................................................................................................ 19
Click Max ....................................................................................................................................................... 20
Time of year .................................................................................................................................................. 21
POD ID........................................................................................................................................................... 21
Distance from land ....................................................................................................................................... 22
6 References ............................................................................................................................................... 22

1 SUMMARY
This report details the findings of a programme of passive acoustic monitoring on and around the
Navitus Bay Offshore Wind Park development site off the south coast of Dorset and Hampshire. C-
PODs were deployed to detect dolphins and porpoises. Two separate C-POD deployments were
carried out on the site. The first consisted of 4 units deployed in a line across the proposed
development area between November 2011 and July 2012. A second array consisting of 6 C-POD
units was installed in September 2012 to the north-west of the site, to assess the usage by dolphins
of the area between the development site and the coast. This was considered to be particularly
important due to concerns surrounding the potential for the noise generated during wind park
construction to impact upon the bottlenose dolphins which are regularly sighted along the Swanage
and Purbeck coast, coupled with uncertainty over how far offshore these dolphins range. From the
first deployment C-PODs were only recovered at three of the four sites, while only four of the six C-
PODs deployed in the 2nd locations were recovered. Porpoise activity across the sites was low with
an animal detected on approximately 1/3 of monitoring days (averaged across sites) and detection
rates within each day were generally infrequent. Dolphin detection rates were extremely low as
there were only a total of 6 dolphin detections across all the sites over the entire monitoring period.
Modelling of the C-POD data using General Additive Modelling (GAMs) and Generalised Estimating
Equations (GEEs) demonstrated that several factors influenced porpoise detections. These were:
how many clicks were logged in each monitoring minute (the ‘ClickMaxbuffer’), the time of year (i.e.
Julian day) and the POD unit that was deployed. Porpoise detection rates decreased significantly as
the number of clicks logged in each minute increased. The ClickMax buffer is an indication of the
level of background noise and therefore the observed pattern suggests that porpoise detections
decreased as background noise increased. This could be explained by animals avoiding periods/areas
of high noise, or the C-PODs performance being affected by the conditions. Porpoise detection rates
varied significantly throughout the year, peaking between December and March and lowest
between July - October. A weak (i.e. not statistically significant) pattern was observed with porpoise
detections increasing as latitude decreased (i.e. sites further from land having higher detection
rates). This monitoring indicates that porpoise and dolphin detection rates are very low in the region
around the Navitus Bay wind park.

2 INTRODUCTION
2.1 SITE LOCATION
As described in Volume B, Chapter 4, (Offshore Alternatives), feedback received during the
consultation process with both the public and other interested stakeholders, along with assessments
undertaken as part of the EIA process, informed changes to the boundary of the Offshore
Development Area. As a result, the Turbine Area described and assessed within the Preliminary
Environmental Information and in this Technical Appendix ('the PEI3 Turbine Area'; shown in Figure
1) differs from that presented within the Environmental Statement (the 'Application Turbine
Area'). The boundary changes to the Turbine Area resulted in a reduction in the area of 22 km2 and
consequently a reduction in the maximum number of Wind Turbine Generators (WTG) from 218
(PEI3) to 194 (Application). No changes have been made to the density of development within the
revised boundary or to the turbine envelopes or the foundation parameters and options. However,
the distances between the turbine area and some of the coastal receptors have increased.
Baseline surveys and modelling predate the decision to reduce the size of the Turbine Area and
consequently this Technical Appendix provides information on the acoustic monitoring designed in
light of the Offshore Development Area PEI3 boundary, within which the entirety of the revised
Turbine Area lies. No changes have been made to the Turbine Area boundary or to the description
of the Project that could lead to impacts on areas not assessed during PEI3, or to effects of a
different nature to those assessed during PEI3. Therefore, the survey data collected, as contained in
this Technical Appendix, provides the information required to identify and assess the likely
significant environmental effects of the Project within the Offshore Development Area for which
development consent is now sought.
The Navitus Bay site is located approximately 14 km from the closest point to the coast (Figure 1).

Figure 1 – Location of the Navitus Bay Round 3 offshore wind park off the south coast of the UK.
2.2 PASSIVE ACOUSTIC MONITORING & C-PODS
In order to inform the Environmental Impact Assessment (EIA), there is a requirement to determine
the relative importance of the location to marine mammal species such as dolphins and harbour
porpoises protected under European Law. One way of monitoring an area to determine the relative
importance of an area over an extended temporal period is to use Passive Acoustic Monitoring
(PAM).
Typically, cetacean surveys have used visual methods to detect animals; but small cetaceans such as
harbour porpoises and other delphinids (i.e. dolphins) can be extremely difficult to observe in the
wild as they spend the majority of their time underwater, generally occur in small groups, and often
present a low profile at the surface. This can result in an underestimation of animal presence. These
species are much easier to detect acoustically, as they regularly produce sounds for orientation,
navigation, foraging and communication. Passive Acoustic Monitoring (PAM) is the term used to
describe the process of passively listening for sounds emitted by animals. This is a widely used tool
that allows the study of submerged animals that are not visible to human observers (many species of
marine mammal spend 90% of their time submerged) and, if properly implemented, it does not
interfere with the animals’ behaviour (Zimmer, 2011). Harbour porpoise sightings rates, in particular,
are heavily impacted by poor sea conditions, with rates dropping rapidly beyond sea state 2
(Hammond et al., 2002). Beyond sea state 4 it becomes very difficult to observe many other
cetaceans. Fortunately, many cetaceans can be reliably detected using passive acoustic methods and

the technique allows for data collection to continue in much higher sea states and at night. It should
be noted, however, that only vocalising animals will be detected.
A PAM survey was conducted on and around the Navitus Bay site using C-PODs between November
2011 and January 2013 across 10 sites. The C-POD, a PAM product manufactured by Chelonia Ltd., is
a self-contained submersible ultrasound monitoring units that include a hydrophone element, an
amplifier, analogue electronic filters and a digital processor, as well as a battery pack and memory.
They do not record sound but work by logging the start and end of echolocation clicks of porpoises
and dolphins to a 5 microsecond resolution. Cetacean clicks are generally of around 50-400 µs
duration. Clicks are detected by comparing the narrow band of frequencies within the 20 – 160 kHz
frequency range and outputs outside of that range. The basic metric they generate is Detection
Positive Minutes (DPM) which is defined as any minute in which a cetacean click train is detected.
Harbour porpoises are the only species of porpoise likely to be present at the site therefore any
porpoise clicks detected will be harbour porpoise.
C-PODs or ‘PODs’ have been used in a number of studies to assess the distribution of harbour
porpoises in the context of monitoring marine renewable energy developments and interactions
with static fishing nets and “pingers”, which are acoustic devices used to reduce harbour porpoise
bycatch (e.g. Booth, et al. 2011; Teilmann et al. 2005; Todd, et al. 2009).
PODs log continuously 24 hours a day and are therefore useful for providing continuous data on
porpoise and dolphin activity within a radius of a few hundred metres. However it is important to
clarify their limitations:
They provide data on porpoise and dolphin acoustic activity (acoustic absence/presence) in a given geographical area (i.e. within a certain range of the hydrophone).
They can be used to compare relative frequency of occurrence/echolocation activity between sites or through time.
They will only record porpoises and dolphins that are actively echolocating.
They cannot, on their own, be used for estimating abundance of porpoises / dolphins.
They cannot distinguish porpoise signals from other narrow-band high frequency sounds.
They do not identify dolphins to a species level.
As it is not possible to determine a count of cetaceans from POD records (e.g. a period of 10 DPM
may indicate multiple porpoises passing and echolocating on a POD, or it may be a single animal
echolocating in proximity to a POD for 10 minutes), here we investigate patterns of ‘cetacean
activity’ which encapsulates either increased cetacean occurrence or increased cetacean
echolocation (or a combination of the two). PODs will only record animals that are actively
echolocating as they pass, and then only those whose orientation is in the field where the POD can
pick it up (i.e. animals that echolocate towards the POD). Harbour porpoise clicks are detectable
within an approximate 250m radius of the unit, and it is generally assumed, from captive studies,
that porpoises echolocate more or less continuously while foraging or travelling (Teilmann et al,
2005, Verfuß et al, 2007). However there is evidence that animals may increase echolocation rates
during the night (Akamatsu, et al. 1994; Carlström, 2005). C-PODs are thought to detect dolphins out
to a range of 1 km.

Gardline Environmental Ltd (GEL) were commissioned by Titan Environmental Surveys Ltd (TESL) on
behalf of Navitus Bay Ltd at the Navitus Bay Wind Park to provide marine mammal monitoring
surveys using C-PODS deployed at four locations across the site for a total of 12 months (Gruden and
Riddoch 2012). Following this initial period of monitoring, an additional 6 monitoring sites were
chosen for a three month deployment to the west of the offshore wind farm site to characterise in
particular the use of the area between the wind farm site and the coast by bottlenose dolphins. The
objective of these deployments of C-PODs was to determine the occurrence of porpoises and
dolphins to inform the Environmental Impact Assessment. The following report presents the results
of the SMRU Ltd. analyses of the data collected by GEL on behalf of TESL.
3 METHODS
3.1 DEPLOYMENT DETAILS
Initially, C-PODs were deployed at four locations, labelled A - D across the development area in a
north-south running line between November 2011 and July 2012. Details of the deployment of the
units can be found in Gruden and Riddoch (2012). Later, C-PODs were deployed in a new array to the
north-west of the development site (labelled aA – aF) between September 2012 and January 2013
(Figure 2). C-PODs were rotated between deployment sites. Initial deployment was conducted in
November 2011 and four data retrievals have been conducted to date. Data collection, once
commenced, continued unbroken at sites B and C. Site A is missing data from the initial deployment,
and site D only has data from deployment 2 (Table 1) due to loss of units.

Figure 2 – Location of C-POD deployments within the Navitus Bay Round 3 offshore wind park footprint.
Table 1 – Summary details of C-POD deployments.
Site Latitude Longitude Depth
(m) PAM Start PAM End Notes
A 50.5533 -1.7191 30 31/01/2012 23/07/2012 Unit deployed on 10/11/2011 but lost
B 50.5165 -1.7362 34 08/11/2011 23/07/2012
C 50.4737 -1.7637 35 08/11/2011 23/07/2012
D* 50.4337 -1.8099 33 31/01/2012 26/02/2012 Unit deployed on 08/11/2011 but lost
aA 50.4700 -1.8956 38 15/09/2012 -- No data - unit deployed on 15/09/2012 but lost
aB 50.5161 -1.8381 37 15/09/2012 06/01/2013
aC 50.5057 -1.9556 34 15/09/2012 -- No data - unit deployed on 15/09/2012 but lost
aD 50.5447 -1.8871 34 16/09/2012 09/01/2013
aE 50.5522 -2.0043 30 16/09/2012 09/01/2013
aF 50.5825 -1.9370 27 16/09/2012 07/01/2013
*C-POD found washed up on shore. Examination of the data suggests that the C-POD broke from its mooring on
26/02/2012.

Figure 3 - Summary of deployment details showing the spread of data collection across sites and the monitoring period. Single point
indicated unit was deployed but no useable data were retrieved.
PODs were deployed on moorings comprising an L-shaped configuration with two anchor points
(Figure 4). The PODs were fixed to the riser from the small anchor point to facilitate the data
download and servicing of PODS during visits. The POD mooring is designed to keep the unit sitting
upright in the water column. When data from the PODs are downloaded, the proprietary software
also provides information on the tilt angle of the PODs at regular intervals through the period of
deployment.
Figure 4 - Details of mooring upon which C-POD was deployed.

3.2 CLICK DETECTION
Initial data processing was performed using C-POD.exe, which allows visual analysis of all logged
clicks and an assessment of how these clicks have been classified into different click trains (using the
KERNO classifier). The C-POD software package will automatically classify any click trains into one of
five categories, reflecting how likely the train is to be a porpoise or dolphin click train. These are “Hi”
(high quality), “Mod” (moderate quality), “Lo” (low quality), “?” (unknown), and “all Q” (all quality).
This allows the user to check for incorrect assignment of click-trains. Boat sonars can be confused
with porpoise click trains for example, and likewise some trains incorrectly classified as being from
boat sonar could be reclassified as cetacean echolocation clicks.
C-POD software generates warnings on data quality when NBHF (Narrow Band High Frequency – in
this region highly likely to be harbour porpoise) or dolphin clicks rates are low. These warnings
indicate whether NBHF or dolphin clicks need to be verified by a human observer. Only Hi and Mod
quality detections have been used in the following analyses. The use of the highest quality click train
type may mean that occasional true click trains that are detected by the C-PODs have been rejected,
but it minimises the inclusion of false positive detections in data analysis which should be the
priority in assessing cetacean activity in proximity to the Navitus Bay site.
3.3 ANALYSIS – DOLPHIN DATA
Click data were run through the KERNO classifier as described above. Due to the low number of
detections classified as dolphins, and importance of understanding dolphin distribution at the
Navitus Bay site, all of the dolphin detections reported by the KERNO detection algorithm were
verified by hand, and sent to Chelonia Ltd. for secondary verification. There were insufficient
detections to conduct any further statistical analyses on the dolphin data.
3.4 ANALYSIS – PORPOISE DATA
For analysis purposes, the C-POD outputs were summarised into hour-long listening intervals in
which porpoises were detected. The response variable used in the modelling was a binary value
indicating whether one or more porpoise detection positive minutes occurred in the hour (DPH) (1)
or not (0). The response was modelled with respect to a range of covariates (Table 3) inside a
Generalised Additive Model (GAM) with logit link and binomial errors. GAMs have been extremely
useful in modelling marine mammal habitat preferences and distribution patterns (Cañadas and
Hammond 2008; DeSegura, et al. 2008; Marubini et al. 2009; Skov and Thomsen 2008). However,
one of the assumptions of GAM methods is that the model errors are independent. This is unlikely to
be the case with a C-POD dataset as observations were collected close together in time (and/or
space). Therefore, this auto-correlation must be accounted for in the modelling approach, in order
for realistic conclusions to be drawn.
Generalised Estimating Equations (GEEs) are an extension of Generalised Linear Models (GLMs),
facilitating regression analyses longitudinal data and non-normally distributed variables (Liang &

Zeger 1986; Hardin & Hilbe, 2002). GEEs can be used to account for temporal and spatial auto-
correlation within a dataset as they function by replacing the assumption of independence with a
correlation structure. Data within the model are grouped into a series of ‘panels’, within which
model errors are allowed to be correlated and between which data are assumed to be independent.
A suitable ‘panel’ size was chosen using autocorrelation function plots and a simple working
independence correlation model structure was also selected. This model structure provides identical
coefficients to those of a standard GAM-based approach, but the standard errors will differ
significantly under the GEE structure, strongly influencing final model selection results, avoiding the
incorrect inclusion of covariates. GEEs have also been used in other circumstances to estimate
cetacean habitat preferences from auto-correlated data (Booth, et al. 2013; Panigada et al. 2008).
In this analysis, a GAM built within a GEE model construct was used to explain harbour porpoise
habitat preferences across the study site. Because we used a binomial model (with values of 0 or 1)
and there were a large proportion of zeroes in the raw data, it is likely that there will be a very low
mean-variance relationship. This may result in underestimation of the uncertainty around model
estimates. This was a function of the low detection rates of porpoises and was difficult to deal with
in the modelling.
All statistical analyses were conducted using the computer package ‘R’ (R Core Development Team,
2006 - available at http://www.r-project.org/). Within R a series of statistical packages (or programs)
are utilised to perform bespoke analyses. The following ‘packages’ were used here to assess
porpoise activity in the Navitus Bay region:
mgcv (used to fit Generalised Additive Models to the data)
geepack (used to fit Generalised Estimating Equations to the data)
splines (used to control the fit of smooth relationships to data)
car (to investigate collinearity (ie. pre-existing patterns) in covariate and porpoise detection
data
3.4.1 CANDIDATE COVARIATES
A range of environmental, oceanographic and survey (i.e. impacting detection) variables are known
to impact studies of cetacean habitat preference (Cañadas and Hammond 2008; DeSegura, et al.
2008; Marubini et al. 2009; Skov and Thomsen 2008). Consequently a range of candidate covariates
were considered for the models. A summary of these factors is shown below (Table 2).

Table 2 - Candidate covariates used in modelling POD data.
Candidate Covariate Description
Noise (ClickMax) The number of clicks logged by the C-POD in any minute (max = 4096)
Angle The tilt angle of the C-PODs
Time of year The Julian Day of the year in which data was collected
DayNightIndex Position in Day/Night (0/2 = sunrise, 0.5 = middle of day, 1 = sunset, 1.5 = middle of night)
ClosetoSW Position in the spring-neaps tidal cycle (0/1 = spring tides, 0.5 = neap tides)
TimeFromLW (TFLW) Position in the daily tidal cycle (0/1 = low water, 0.5 = high water)
Latitude/Longitude Spatial coordinates of C-POD deployment locations
Temperature Water temperature (°C) logged by the C-POD.
3.4.2 SURVEY COVARIATES
To investigate the potential for differing detection sensitivities between C-POD units, C-POD ID was
included as a covariate in the models (as PODs were rotated between sites in the first site). In
addition, the site at which C-PODs were deployed was included to capture spatial differences in the
study region. When configuring C-PODs prior to deployment it is possible to set the maximum
number of clicks to be logged (henceforth referred to as ‘ClickMax’) in any given minute of
monitoring. Selecting the ‘ClickMax’ is a trade-off between maximising the amount of monitoring
time in each minute (it is possible for the ClickMax to be reached in <1minute in noisy environments)
against running out of storage space before the C-PODs are retrieved (and losing valuable
monitoring time). Here the default value of 4096 clicks per minute was selected as the ClickMax. As a
proxy for background noise, the ClickMax averaged over each monitoring hour was used as a
covariate to determine whether either porpoises were avoiding periods or areas of high noise
and/or detection of porpoise click trains was impacted by periods of high noise.
3.4.3 BIOLOGICAL/GEOGRAPHIC COVARIATES
Seasonal variations in harbour porpoise habitat use have been observed in a number of studies using
C-PODs and acoustic surveys (SMRU Ltd, 2011; Verfuß, et al. 2007). Consequently, in this report
‘Month’ was included as a candidate covariate to determine if harbour porpoises exhibited seasonal
usage patterns in the region.
Previous studies have investigated whether harbour porpoises have diurnal patterns of movement
and/or vocalisation behaviour (Akamatsu, et al 1994, Carlström, 2005, Todd et al. 2009). To assess
whether harbour porpoise exhibit such shifts in the study region, ‘DayNightIndex’ was included in
the models as a candidate covariate - as continuous indices between 0 and 2, values between 0
(sunrise) and 1 (sunset) indicating day-time and values between 1 (sunset) and 2 (following days
sunrise) indicating night-time.

Porpoise distribution has been associated with state of tide, with animals appearing more prevalent
or more detectable during certain phases of tide (e.g. slack, flood, ebb). A range of studies of their
distribution have identified site-specific patterns associated with tidal activity (Calderan 2003;
Embling et al. 2010; Johnston et al. 2005; Pierpoint 2008; Skov and Thomsen 2008). Here,
‘ClosetoSW’ (position in the lunar tidal cycle, i.e. spring-neaps cycle) and ‘Time from Low Water’
(TFLW) (position in the daily tidal cycle) were used to determine whether the tidal activity in the
Navitus Bay region was influencing porpoise occurrence and/or acoustic activity. These tidal
covariates were created using tidal port data from Bournemouth (in POLTIPS v.3).
3.4.4 INVESTIGATING COLLINEARITY
Collinearity between covariates, if unaccounted for in models, can cause inflated or underestimated
standard errors and p-values and lead to poor model selection. To avoid this, collinearity between
predictor variables was investigated prior to modelling using ‘variance inflation factors’ (VIF) (Cox
and Snell 1989; Fox and Monette 1992) using the vif function in the ‘car package’ in R. Large VIF
values indicate collinearity and a threshold of VIF = 10 was used here. VIFs > 10 resulted in the
retention of the covariate with the best fit to the data, and the other covariates being removed
(Table 3).
Table 3 - Details of assessing collinearity between covariates and those retained.
Candidate Covariate Collinearity Issues? Retained?
Noise (ClickMax) N --
DayNightIndex N --
ClosetoSW with TimeFromLW No (TimeFromLW retained)
TimeFromLW with ClosetoSW Yes
Temperature With Month No (Month retained)
Angle N --
Latitude/Longitude N --
Time of year with Temperature Yes
3.4.5 MODEL SELECTION
A single main model was constructed using all the porpoise data collected from the study site
combined. Candidate covariates were offered in the model selection phase to construct the final
models. Covariates were selected for models using a manual stepwise selection using QIC.
Specifically, a global (all terms) model was constructed and QIC was used to govern model selection
of all possible variations of that model. Following this, GEE-based p-values were used to determine
the statistical significance of each covariate and terms with large p-values were removed from the
model. The relative importance of each covariate was assessed by looking at the drop in QIC caused
by removing a covariate from the full model.

4 RESULTS
4.1 DETECTION RATES
4.1.1 DOLPHINS
Six verified dolphin detections were made during the duration of this study across the ten C-POD
sites (Table 4 & Figure 5).
There are too few data points to conduct any further analyses on these data, and unfortunately it is
not possible to identify species from these detections. However it is noteworthy is that dolphin
detections were very infrequent (2 in April, 1 in July, 1 each in October, November, December), very
short (only one lasted over 10 minutes) and only occurred on three sites (2 at site C, 1 at B and 3 at
aD). Because of the low detection rates for dolphins, it was not possible to statistically analyse these
data using the method by which the porpoise data were analysed.
Table 4 - Times and locations of dolphin detections made during the deployments at Navitus Bay. Only six detections were found to be
dolphins following verification (three in the original sites (A-D) and three in the additional deployment).
Site Deployment Start time End Time
C 3 07/04/2012 22:02 07/04/2012 22:03 C 3 08/04/2012 00:02 08/04/2012 00:09 B 4 16/07/2012 22:04 16/07/2012 22:16
aD -- 18/10/2012 12:23 18/10/2012 12:30 aD -- 03/11/2012 06:53 03/11/2012 06:53 aD -- 25/12/2012 22:05 25/12/2012 22:05

Figure 5 – C-POD locations with dolphin detections (cyan circles) from the monitoring program.
4.1.2 HARBOUR PORPOISE
Porpoises were detected on 31% of days during the study period. For each site the number of hours
with ≥1 detection positive minute(s) in each C-POD dataset (DPMpH) and the percentage of the
dataset with detection positive minutes (% of DPH) was calculated (Table 5). At all sites the detection
rates for porpoises were generally low ranging between 0.9-3.6 % of hours with DPM and a mean of
0.021-0.086 DPMpH.
Within each of the regions there were variations in porpoise activity between sites. Detections rates
were lowest at sites A (Nov 2011 – July 2012) and aF (Sept 2012 – Jan 2013). Detection rates were
highest at the most offshore sites (C and aB) with porpoises present between 2.5-3.6% of the
monitoring period.
It is clear from the very low mean detection rates throughout the study, that there are a large
number of zeroes in the data. This means that the potential variance in the models will be small,
which may result in underestimation of confidence limits around the estimates (i.e. fitted
relationships may look more certain than they are in reality).

Table 5 - Summary harbour porpoise detection data for the Navitus Bay C-POD deployments
Site Detections No. Hours #Days % of DPH MeanDPMpH %DPD
A 59 4027 168 1.465 0.025 (0.24) 26.8
B 109 6072 253 1.795 0.041 (0.42) 28.5
C 168 4630 193 3.629 0.086 (0.63) 51.8
D -- -- -- -- -- --
aB 67 2711 113 2.471 0.055 (0.46) 36.3
aD* 14 696 27 2.011 0.029 (0.22) 33.3
aE 32 2016 84 1.587 0.037 (0.37) 28.6
aF 24 2424 101 0.990 0.021 (0.24) 16.8
* - data from site aD had to be deleted due to issues with the data collection (see section 4.1).
4.1.2.1 FITTED RELATIONSHIPS AND THE RELATIVE IMPORTANCE OF EACH COVARIATE
The relationship between predictor variables and the response are shown below (Figure 6). In each
plot, the horizontal x-axis is the variable we are interested in investigating the change in porpoise
activity with, e.g. time of year. The vertical y-axis explains how porpoise acoustic activity changes as
the variable of interest (x-axis) changes. The associated dotted lines show the 95% confidence
intervals for the predicted relationships (i.e. it is highly likely that the ‘true’ relationship fits between
the upper and lower dotted lines). Only predictor variables that had a significant influence on
porpoise activity and that were retained in the model are shown – therefore if no plot is shown for a
covariate discussed above, it means that porpoise acoustic activity did not change with respect to
this variable (see section . Once the final structure for the model was determined, the relative
importance of each covariate was investigated using the loss in QIC (a measure giving an estimate of
how well a covariate explains the variability in the data) when each covariate was omitted from the
final models (Table 6).
In the model the following covariates were significant in explaining the variation in detections
(relationships also shown in Figure 6):
ClickMax – Porpoise detection rates decreased significantly as the number of clicks logged in each
minute increased. This pattern could be explained by porpoises avoiding the region during ‘noisy’
periods. It is also possible that the ClickMax buffer being reached in each monitoring minute being
indicative of the detection of porpoises being affected during the noisiest periods. This was the most
important variable in explaining the variation in detections.
Time of year (Julian Day) – Porpoise detection rate varied significantly throughout the year, peaking
between December and March and lowest between July - October.
POD ID – There was significant variation in porpoise detections caused by the POD that was used.
Figure 6 (right-hand plot) indicates that the different C-PODs used (black lines) had different
detection rates. Detection rates were lowest in unit 1678 and highest in units 1668 and 2035 (the
confidence intervals around these values are shown by the red-marks above and below each black
line). By including this covariate we have tried to control for this effect (i.e. different detection rates)

in the modelling. Therefore we can be confident in the intra-annual variations in porpoise activity
observed.
Figure 6 - Fitted relationships for the model with 95% confidence intervals based on GAM standard errors. Y axes show the partial
residuals for each model covariate generated by regressing the response on the other covariates. A larger y-axis indicates a more
important covariate.
Table 6 – The relative importance of each model covariate in explaining the observed porpoise activity patterns. 1 indicates the
covariate was the most important and 3 indicates the lowest importance.
Covariate decrease in QIC Rank
ClickMax -226.117 1
Time of year -49.3272 2
POD ID -27.5547 3
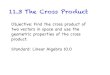
4.1.2.2 THE (MINOR) EFFECT OF LATITUDE
Whilst latitude was not retained in the final model (indicating it did not have a strong enough effect
on porpoise detection rates given the other covariates in the model), a weak but noteworthy pattern
was observed. As the latitude of the site decreased (i.e. moving south) the detection rates of
porpoises increased (Figure 7). This likely indicates that porpoises are found further offshore.

Figure 7 - Porpoise activity plotted against Latitude. The y-axis is the percentage of days (%DPD) in each dataset with one or more
porpoise positive minutes.
4.2 C-POD PERFORMANCE
Most of the C-PODs worked well during deployments, however three of the units were lost during
deployments (site D (twice), site aA and aC) meaning little or no data were collected from these
sites. Also noteworthy was a problem that occurred during the deployment at site aD. During the
deployment on the 15/10/2012 the C-POD unit appeared to tip over to horizontal (possibly dropping
to the seabed and lying horizontally) and immediately following that a number of false porpoise
detections were made on the unit. During this time three dolphin detections were made and were
validated by Chelonia Ltd – but it was not possible to distinguish the genuine porpoise detections
from the false ones during this period. Therefore porpoise data collected after 15/10/2012 was
excluded from further analyses
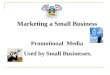
4.2.1 EFFECT OF NOISY ENVIRONMENT
The performance of PAM equipment can be impacted by noisy environments. In the case of PODs,
they work by monitoring each minute with a pre-determined ‘buffer’, previously described as the
‘ClickMax buffer’. In each minute the POD will continue to monitor until this maximum buffer is
reached. As described in section 3.4.2, in the C-POD data it was possible to determine how often (if
at all) this ClickMax buffer was reached during each minute of the deployment and as discussed, this
was incorporated into the modelling analysis. From assessing the raw data, it is clear that the C-PODs
deployed suffered from some data loss due to the ClickMax being reached (Figure 8 & 9). The extent
of this issue was strongest during periods of spring tides.
R² = 0.8516
0
10
20
30
40
50
60
50.46 50.48 50.5 50.52 50.54 50.56 50.58 50.6
% o
f D
etec
tio
n P
osi
tive
Day
s
Latitude (decimal degrees)

Figure 8 - Plot showing noise levels with respect to the ClickMax buffer over 3 days. The 'plateauing' indicates the ClickMax is reached
for hours at a time (during which the C-POD is not monitoring effectively - see below).
Figure 9 - A close-up plot of 3 successive minutes of monitoring. The vertical dotted lines indicate the divisions between monitoring
minutes. The bottom panel shows all the clicks (small white dots) by frequency logged in each minute. It is clear that in each minute
period shown, only a few seconds of actual ‘listening’ occurs before the ClickMax buffer is reached and the POD becomes dormant
before waiting for the next available monitoring minute period.
5 DISCUSSION
The results from this study have highlighted some important features relating to porpoise activity
around the Navitus Bay development site. Porpoises were detected on between 17-52% of days in
the study area indicating that porpoises were generally present infrequently in the region
throughout the monitored period. In addition to porpoises only being detected infrequently, overall
usage was low; the percentage of hours containing a porpoise detection (% with DPM) were

consistently low (~1 - 3.6%). Similarly the total number of porpoise positive minutes per day was
extremely low. The porpoise detection rates observed across the Navitus Bay site are much lower
than other C-POD/T-POD studies around the UK (Table 6) indicating that this region is likely less
important habitat than some of the other regions studied. This is supported by other studies (incl.
reviews of existing data) which indicate the south coast of England is not a key area for porpoises
(Reid, et al. 2003; Hammond, et al. 2002; SCANS II, 2005)
Table 6 - A comparison of harbour porpoise detection rates from Navitus Bay with other sites around the UK (using C-PODs/T-PODs.
Detection rates taken from Booth, et al., (2011); Booth & Lacey, 2011 and Sparling & Booth, 2012.
Site Equipment % with DPM MeanDPMpH %DPD
N. Ireland T-PODs 6% 0.164 86%
SW Wales C-POD & T-PODs 9-18% 0.21-0.46 97%
Bristol Channel C-PODs 59% 16.2 84%
Navitus Bay C-PODs 1.99% 0.042 31%
The fact that there were very few confirmed dolphin detections indicates that dolphins are an
infrequent visitor to the area covered by the monitoring. It is important to highlight that PODs are
expected to detect vocalising dolphins out to ranges over approximately 1,250 m (based on studies
elsewhere; T-POD – the C-POD predecessor - in Philpott, et al.(2007) and C-PODs (Meier, 2010)); it is
therefore possible that dolphins do use some parts of the area not covered by the monitoring,
however given the design and spacing of the C-POD array (approximately 3.5 km between sites), it is
expected that there would be a good probability of animals being detected within the area likely to
be affected by the construction and operation of the wind park. This infrequent dolphin presence
across the area monitored indicates that there is a low possibility of dolphin species being disturbed
by piling.
PODs log continuously and are therefore useful for providing continuous data on porpoise activity
within a radius of 2-300m (Tougaard et al. 2006). However it is important to stress that range is likely
to vary depending on the direction of travel of the porpoises and to what extent clicks are produced
off-axis. This is because harbour porpoise clicks are produced with a very narrow beamwidth and so
are highly directional (i.e. an animal pointing away from a C-POD will not be detected) It is also likely
that interference by non-biological sound sources during tidal flows caused high levels of data
clipping and therefore a reduction on the available monitoring time during periods of high tidal flow
(see ‘C-POD Performance’ above) as a strong tidal pattern was observed in the ClickMax.
The modelling approach employed in this study allowed an evaluation of the different factors
affecting porpoise activity across the monitoring locations and allowed us to assess the relative
importance of each factor in explaining the observed variations in porpoise activity.
CLICK MAX
The Noise proxy (‘ClickMax’), the number of clicks recorded in each monitoring minute, was
determined to be the most important factor. As noise levels increased the porpoise activity
decreased dramatically, suggesting that either animals were avoiding noisy areas or periods or that

ambient noise conditions impacted the ability for porpoises to be detected using the C-PODs (i.e.
high noise causing the POD to reach its click maximum before the minute of monitoring was
completed). The inclusion of this covariate is an effort to ‘control for’ any issues caused by noise. In
addition, although it was retained in the best model, noise was determined to be of relatively low
importance in explaining the patterns observed.
The ClickMax setting used during the Navitus Bay deployments was the default setting of 4096. This
can be set higher, allowing more flexibility in monitoring. Any future deployments should consider
setting this to a higher level and deploying for shorter periods (because by setting a higher buffer
level, the memory gets filled up quicker with more clicks, necessitating the need for more frequent
service visits). It is important to note that selecting the ‘ClickMax’ is a trade-off between maximising
the amount of monitoring time in each minute (as discussed it is possible for the ClickMax to be
reached in <1minute in noisy environments) against running out of storage space before the C-PODs
are retrieved (and losing valuable monitoring time). Here the default value of 4096 clicks per minute
was selected as the ClickMax to allow for service visits to be conducted on a 2-3 month rotation.
However, it is noted from the results of this deployment that porpoise and dolphin detections are
very low, and further deployment is unlikely to achieve any significant addition to the analysis.
TIME OF YEAR
Significant monthly variations in porpoise activity were observed in the data as ‘Julian Day’ was
found to be an important covariate in explaining the observed patterns. A number of other studies
have determined that porpoise activity varied throughout the year. In this study, detection rates
were highest in winter and spring and lowest in the late summer and autumn periods. Previous
studies have investigated seasonal variations in porpoise activity and patterns appear to vary
between locations. At some sites there were peaks of porpoise activity in summer months and at
others peaks occurred during winter and spring months. Studies in Cardigan Bay have observed
variations in the number of porpoise positive days depending on the month with this metric being
highest in winter and spring and lowest in summer and autumn (Simon, et al. 2010). Significant
seasonal variations with activity peaks during summer months (and lows in winter months) were
observed in TPOD studies in the Baltic Sea (Verfuß, et al. 2007). In SMRU Ltd studies of harbour
porpoise in Strangford Lough, porpoise activity varied seasonally, with peaks of approximately equal
magnitude in spring and autumn and the lowest detections in the middle of summer (Booth, et al.
2011). The patterns observed here do not match with other studies, but as is noted above, site-
specific variations in presence are common for the species.
As no significant numbers of detections of dolphins were found, no seasonal patterns could be
determined.
POD ID
Results showed that there was significant inter-C-POD variability that influenced the detection rates
of harbour porpoises during the study. This means that while we cannot adjust detection rates
between different units by a ‘variability’ metric, we know that the impact of the use of different C-
POD units has been ‘controlled for’ in the models and therefore we can be more certain about the
conclusions drawn with respect to other model covariates. Furthermore it was identified that

biological factors, e.g. time of year, were more important in explaining the observed porpoise
detection patterns.
DISTANCE FROM LAND
This study observed a weak gradient in porpoise detections with distance from land. As distance
from land increased (covariate ‘latitude’ in the models), the porpoise detection rates also increased.
Other studies have indicated a relationship with distance from land, however the opposite pattern
was observed – with detection rates decreasing offshore (e.g. Scheidat, et al., 2012; Booth, et al.
2013). It could be that animals typically do not come in so close into the bay, but merely transit
through the region using offshore waters.
As no significant detections of dolphins were found, no spatial patterns could be determined.
6 REFERENCES
Gruden, P., Riddoch, N. 2012. Marine Mammal Passive Acoustic Monitoring Bi-Monthly Field Report.
November 2011 – February 2012. Report by Gardline Environmental Ltd to Titan Environmental
Surveys Ltd, on behalf of Eneco. Navitus Bay R3 OWF site. 10pp.
Akamatsu, T., Hatakeyama, Y., Kojima, T., Soeda, H., 1994. Echolocation Rates of 2 Harbor Porpoises
(Phocoena phocoena). Marine Mammal Science 10, 401-411.
Barham, R.J., Mason, T.I. & Nedwell, J.R. 2012. Modelling of subsea noise for the Navitus Bay Wind
Park. Subacoustech Environmental Report No. E342R0209. 26 March 2013. pp81
Booth, C.G., 2010. Variation in habitat preference and distribution of harbour porpoises west of
Scotland. PhD thesis. Scottish Oceans Institute, Sea Mammal Research Unit, University of St
Andrews: 264 pp.
Booth C.G., Embling C., Gordon J., Calderan S.V., Hammond P.S. 2013. Habitat preferences and
distribution of the harbour porpoise (Phocoena phocoena) west of Scotland. Marine Ecology-
Progress Series 478:273-285
Booth, C.G., Mackay, A.I., Northridge, S. and Sparling, C.E. 2011. Acoustic Monitoring of Harbour
Porpoise (Phocoena phocoena) in Strangford Lough. Report SMRUL-MCT-2011-16 to Marine Current
Turbines. July, 2011 (unpublished)
Calderan, S.V., 2003. Fine-scale temporal distribution by harbour porpoise (Phocoena phocoena) in
North Wales: acoustic and visual survey techniques., In School of Biological Sciences. University of
Wales, Bangor, Bangor, Wales.
Cañadas, A., Hammond, P.S., 2008. Abundance and habitat preferences of the short-beaked
common dolphin (Delphinus delphis) in the South-western Mediterranean: implications for
conservation. Endangered Species Research 4, 309-331.

Carlström, J. (2005). Diel variation in echolocation behaviour of wild harbour porpoises. Marine
Mammal Science 21(1): 1-12.
Cox, D.R. & Snell, E.J., 1989. Analysis of Binary Data (Second Edition), 2nd Edition edn. Taylor &
Francis Ltd Chapman & Hall/CRC.
De Segura, A.G., Hammond, P.S., Raga, J.A., 2008. Influence of environmental factors on small
cetacean distribution in the Spanish Mediterranean. Journal of the Marine Biological Association of
the United Kingdom 88, 1185-1192.
Embling, C.B., Gillibrand, P.A., Gordon, J., Shrimpton, J., Stevick, P.T., Hammond, P.S., 2010. Using
habitat models to identify suitable sites for marine protected areas for harbour porpoises (Phocoena
phocoena). Biological Conservation 143, 267 - 279.
Fox, J., Monette, G., 1992. Generalized collinearity diagnostics. Journal of the Acoustical Society of
America 87, 178-183.
Hammond, P.S., Berggren, P., Benke, H., Borchers, D.L., Collet, A., Heide-Jørgensen, M.P., Heimlich
S., Hiby, A.R., Leopold, M.F., Øien, N. (2002) Abundance of harbour porpoise and other cetaceans in
the North Sea and adjacent waters. Journal of Applied Ecology 39: 361-376.
Hardin, J.W., Hilbe, J.M., 2002. Generalized estimating equations, 2nd Edition edn. Chapman and
Hall CRC.
Johnston, D.W., Westgate, A.J., Read, A.J., 2005. Effects of fine-scale oceanographic features on the
distribution and movements of harbour porpoises (Phocoena phocoena) in the Bay of Fundy. Marine
Ecology-Progress Series 295, 279-293.
Liang, K.-T., Zeger, S.L., 1986. Longitudinal data analysis using generalized linear models. Biometrika
73, 13-22.
Marubini, F., Gimona, A., Evans, P.G.H., Wright, P.J., Pierce, G.J., 2009. Habitat preferences and
interannual variability in occurrence of the harbour porpoise Phocoena phocoena off northwest
Scotland. Marine Ecology-Progress Series 381, 297-310.
Meier, R.E. 2010. Static Acoustic Monitoring of the Bottlenose Dolphin Tursiops truncatus, in the
Cardigan Bay Special area of Conservation, Wales: C-POD Detection Capabilities and Echolocation
Use. MSc Thesis, university of Wales, Bangor. 100pp.
Panigada, S., Zanardelli, M., MacKenzie, M., Donovan, C., Melin, F., Hammond, P.S., 2008. Modelling
habitat preferences for fin whales and striped dolphins in the Pelagos Sanctuary (Western
Mediterranean Sea) with physiographic and remote sensing variables. Remote Sensing of
Environment 112, 3400-3412.
Philpott, E., Englund, A., Ingram, S. and Rogan, E. 2007. Using T‐PODs to investigate the
echolocation of coastal bottlenose dolphins. Journal of Marine Biological Association, 87, 11‐
17.

Pierpoint, C., 2008. Harbour porpoise (Phocoena phocoena) foraging strategy at a high energy, near-
shore site in south-west Wales, UK. Journal of the Marine Biological Association of the United
Kingdom 88, 1167-1173.
R Core Development Team. 2006. R: a language and environment for statistical computing. R
Foundation for Statistical Computing, Vienna. www.R-project.org
Reid, J., Evans, P.G.H., Northridge, S.P. (2003). Cetacean Distribution Atlas. Joint Nature Conservation
Committee, Peterborough. 68pp. Available for download from
http://www.jncc.gov.uk/PDF/cetaceansAtlas_web.pdf
SCANS-II, 2008. Small Cetaceans in the European Atlantic and North Sea. Final Report to the
European Commision under project LIFE04NAT/GB/000245, p. 55. Sea Mammal Research Unit, Gatty
Marine Laboratory, University of St Andrews, Fife, KY16 8LB, UK. Available from http://biology.st-
andrews.ac.uk/scans2, St Andrews.
Scheidat, M., Verdaat, H., Aarts, G. 2012. Using aerial surveys to estimate density and distribution of
harbour porpoises in Dutch waters. J Sea Res 69: 1-7.
Simon, M., Nuuttila, H., Reyes-Zamudio, M.M., Ugarte, F., Verfuss, U. And Evans, P.G.H. 2010.
Passive acoustic monitoring of bottlenose dolphin and harbour porpoise, in Cardigan Bay, Wales,
with implications for habitat use and partitioning. Journal of the Marine Biological Association of the
United Kingdom 90(8), 1539–1545.
SMRU Ltd. 2011. Interim Report – July 2011 - Static acoustic monitoring of harbour porpoise and
dolphins at the proposed jetty construction site – Hinkley. SMRU Ltd Interim Report to CEFAS. July
2011.
Skov, H., Thomsen, F., 2008. Resolving fine-scale spatio-temporal dynamics in the harbour porpoise
Phocoena phocoena. Marine Ecology-Progress Series 373, 173-186.
Teilmann, J., Akamatsu, T., Miller, L.A., Dietz, R., Tougaard, J. & Siebert, U., 2005. Echolocation
behaviour of a wild harbour porpoise during diving. In Abstract Book of the 16th Biennal Conference
on The Biology Of Marine Mammals, San Diego, California, 12–16 December 2005, Society of Marine
Mammalogy, pp. 276–277.
Todd, V.L.G., Pearse, W.D., Tregenza, N.C., Lepper, P.A., Todd, I.B., 2009. Diel echolocation activity of
harbour porpoises (Phocoena phocoena) around North Sea offshore gas installations. ICES Journal of
Marine Science 66, 734-745.
Verfuß U.K., Miller, L.A. & Schnitzler, H.U., 2005. Spatial orientation in echolocating harbour
porpoises (Phocoena phocoena). The Journal of Experimental Biology 208, 3385-3394.
Verfuß, U.K., Honnef, C.G., Meding, A., Dahne, M., Mundry, R., Benke, H., 2007. Geographical and
seasonal variation of harbour porpoise (Phocoena phocoena) presence in the German Baltic Sea
revealed by passive acoustic monitoring. Journal of the Marine Biological Association of the United
Kingdom 87, 165-176.