Embed Size (px)
Citation preview

TDMA SLOT RESERVATION IN CLUSTER-BASED
VANETS
by
Mohammad Salem AlmalagB.S. December 2000, King Saud UniversityM.S. December 2004, Ball State University
A Dissertation Submitted to the Faculty ofOld Dominion University in Partial Fulfillment of the
Requirements for the Degree of
DOCTOR OF PHILOSOPHY
COMPUTER SCIENCE
OLD DOMINION UNIVERSITYMay 2013
Approved by:
Dr. Michele C. Weigle (Director)
Dr. Kurt Maly (Member)
Dr. Hussein Abdel-Wahab (Member)
Dr. Stephan Olariu (Member)
Dr. Dimitrie C. Popescu (Member)

ABSTRACT
TDMA SLOT RESERVATION IN CLUSTER-BASED VANETS
Mohammad Salem AlmalagOld Dominion University, 2013Director: Dr. Michele C. Weigle
Vehicular Ad Hoc Networks (VANETs) are a form of Mobile Ad Hoc Networks
(MANETs) in which vehicles on the road form the nodes of the network. VANETs
provide several services to enhance the safety and comfort of drivers and passengers.
These services can be obtained by the wireless exchange of information among the
vehicles driving on the road. In particular, the transmission of two different types of
messages, safety/update and non-safety messages.
The transmission of safety/update message aims to inform the nearby vehicles
about the sender’s current status and/or a detected dangerous situation. This type
of transmission is designed to help in accident and danger avoidance. Moreover,
it requires high message generated rate and high reliability. On the other hand,
the transmission of non-safety message aims to increase the comfort on vehicles by
supporting several non-safety services, from notifications of traffic conditions to file
sharing. Unfortunately, the transmission of non-safety message has less priority than
safety messages, which may cause shutting down the comfort services. The goal of
this dissertation is to design a MAC protocol in order to provide the ability of the
transmission of non-safety message with little impact on the reliability of transmit-
ting safety message even if the traffic and communication densities are high.
VANET is a highly dynamic network. With lack of specialized hardware for in-
frastructure and the mobility to support network stability and channel utilization, a
cluster-based MAC protocol is needed to solve these overcomes.
This dissertation makes the following contributions:
1. A multi-channel cluster-based TDMA MAC protocol to coordinate intra-
cluster communications (TC-MAC)
2. A CH election and cluster formation algorithm based on the traffic flow and
a cluster maintenance algorithm that benefits from our cluster formation algo-
rithm

3. A multi-channel cluster-based CDMA/TDMA hybrid MAC protocol to coor-
dinate inter-cluster communications
I will show that TC-MAC provides better performance than the current WAVE
standard in terms of safety/update message reliability and non-safety message deliv-
ery. Additionally, I will show that my clustering and cluster maintenance protocol
provides more stable clusters, which will reduce the overhead of clusterhead election
and re-clustering and leads to an efficient hierarchical network topology.

iv
Copyright, 2013, by Mohammad Salem Almalag, All Rights Reserved.

v
ACKNOWLEDGEMENTS
This dissertation would not have been possible without the guidance and the
help of several individuals who in one way or another contributed and extended their
valuable assistance in the preparation and completion of this study.
First and foremost, I would like to express my sincere gratitude to my advisor Dr.
Michele C. Weigle for the continuous support of my Ph.D. study and research, for her
patience, motivation, enthusiasm, and immense knowledge. Her guidance helped me
in all the time of research and writing of this dissertation. I could not have imagined
having a better advisor and mentor for my Ph.D study.
My sincere thanks also goes to Dr. Hussein Abdel-Wahab, former GPD of the
Department of Computer Science, for the support, motivation and guidance. Thank
you for believing in me from the first day I joined the program.
Special thanks to Dr. Stephan Olariu for being a great mentor and for teaching
me how to be a researcher. I will never forget when you always welcomed me in your
office, I enjoyed every discussion and conversation we had.
Also, I would like to thank the rest of my dissertation committee: Dr. Kurt Maly
and Dr. Dimitreie C. Popescu for their encouragement, and insightful comments.
My colleagues in the Wireless Network Research Lab and the staff of the Depart-
ment of Computer Science, thanks for you help and support.
My uncle, Abdel-Aziz Almalag, thank you for being there for me, my mother, my
brother, and my sisters. I do remember the first day when I went to school, it was
with you. I remember you showing up in my school and asking my teachers about
me.
I would like to thank my brother Humood, and my sisters Naema and Nawal, for
supporting me throughout my life, and taking care of my mother while I am away
from home.
I cannot thank my mother, Modi AlOmair, enough. She always had confidence
in me and offered me encouragement and support in all my endeavours.
Last but not the least, to my dear father, God bless his soul, that I have never
seen. You are always in my heart wherever I go.

vi
TABLE OF CONTENTS
Page
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
Chapter
1. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 MOTIVATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 OBJECTIVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 THESIS STATEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 CONTRIBUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.5 OUTLINE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. BACKGROUND AND RELATED WORK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1 CHARACTERISTICS OF VANETS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2 MESSAGES AND TRANSMISSIONS IN VANETS . . . . . . . . . . . . . . . . 92.3 IEEE STANDARDS FOR MAC PROTOCOLS FOR VANETS . . . . . . 102.4 TDMA AND CDMA TECHNIQUES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.5 CLUSTERING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6 ALTERNATE MAC PROTOCOLS FOR VANET . . . . . . . . . . . . . . . . . 212.7 SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3. MULTI-CHANNEL CLUSTER-BASED TDMA MAC PROTOCOL FORINTRA-CLUSTER COMMUNICATIONS (TC-MAC) . . . . . . . . . . . . . . . . . . . . . . 323.1 TDMA SLOT ASSIGNMENT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2 INTRA-CLUSTER COMMUNICATION . . . . . . . . . . . . . . . . . . . . . . . . . 383.3 IMPACT OF GUARD INTERVAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.4 SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4. CLUSTERING AND CLUSTER MAINTENANCE. . . . . . . . . . . . . . . . . . . . . . . . . 474.1 CLUSTERHEAD ELECTION AND CLUSTER FORMATION . . . . . . 474.2 CLUSTER MAINTENANCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.3 SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5. CDMA/TC-MAC HYBRID PROTOCOL FOR INTER-CLUSTER COM-MUNICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.1 CDMA/TC-MAC ARCHITECTURE . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.2 DISSEMINATING INTER-CLUSTER MESSAGES . . . . . . . . . . . . . . . . 635.3 SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67

vii
6. EVALUATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.1 METHODOLOGY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696.2 CLUSTERHEAD ELECTION AND CLUSTER FORMATION . . . . . . 726.3 TC-MAC PROTOCOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7. APPLICATIONS USING TC-MAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 897.1 BACKGROUND OF FILE SHARING TECHNIQUES IN VANETS . . 897.2 P2P FILE SHARING IN VANETS USING TC-MAC . . . . . . . . . . . . . . . 907.3 EVALUATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 927.4 SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
8. CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 978.1 SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 978.2 CONTRIBUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 988.3 EVALUATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 998.4 FUTURE WORK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
REFERENCES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
VITA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108

viii
LIST OF TABLES
Table Page
1. IEEE 802.11p parameter settings for different applications categories . . . . 15
2. Priority scheme with 4 levels (Based on table from [1]) . . . . . . . . . . . . . . . . 26
3. Different message priorities with parameters . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4. Network settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5. CDMA/TC-MAC codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6. Network parameters used in the simulation for the clusterhead electionand cluster formation protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7. Network parameters used in the simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8. Density levels in the highway with the speed limits . . . . . . . . . . . . . . . . . . . . 72
9. Scenarios for TC-MAC and WAVE using a single-hop cluster, the maxi-mum cluster length is 300 m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
10. Scenarios for TC-MAC and WAVE using a two-hop cluster, the maximumcluster length is 600 m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
11. Testing parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
12. Levels of active vehicles in the cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94

ix
LIST OF FIGURES
Figure Page
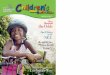
1. An example of VANETs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2. US DSRC spectrum allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3. Division of time into CCH intervals and SCH intervals, IEEE 1609.4 stan-dard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
4. Clustering envionment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
5. US DSRC spectrum allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6. The WAVE Protocol stack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
7. Reference architecture of the MAC channel coordination. (Figure 4 ofIEEE Trail-Use Standard for Wireless Access in Vehicular Environments(WAVE)-Multi-channel Operation) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
8. Division of time into CCH intervals and SCH intervals, IEEE 1609.4 stan-dard (based on [2]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
9. Distributed coordination function for channel access. (Based on figurefrom [3]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
10. TDMA frame structure showing a data stream divided into frames andthe frames divided into time slots, assuming that we have 6 nodes in theTDMA frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
11. Two clusters communicating with each other through Gateway nodes(GN) that are assigned by the clusterhead (CH) of each cluster . . . . . . . . . 18
12. Highway scenario where the first vehicle needs to disseminate an emer-gency message. (Based on figure from [4]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
13. TDMA slot assignment without using VeSOMAC, regular TDMA . . . . . . . 23
14. TDMA slot assignment with VeSOMAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
15. Vehicles directions in VeMAC. Vehicles in the dark area are Left direction,while others are Right direction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
16. TDMA time frame in VeMAC shows L, R and F sets. (Based on figurefrom [5]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25

x
17. Token ring in MCTRP with different types of vehicles in the proposedprotocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
18. j ’s mini-slots on channel k ; vehicle j owns a mini-slot on the CCH in theslot preceding its own slot on the SCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
19. Logical frames in TC-MAC for N=61 and k=6 . . . . . . . . . . . . . . . . . . . . . . . 35
20. Example shows the slots that vehicle A with local ID 4 and vehicle B withlocal ID 15 can use to communicate on the SCHs . . . . . . . . . . . . . . . . . . . . . 37
21. Disseminating of safety messages by the CH in a multi-hop cluster. TheCH sends the safety messages to vehicles in group L and group P. TheCH will pick a vehicle from group P to be a relay node to vehicles ingroup R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
22. Unicast of non-safety messages in a two-hop cluster, where vehicle A fromgroup L is trying to send a non-safety message to vehicle B from group R.Vehicle A needs to find a vehicle in group P to be a relay node to vehicle B 41
23. Flowchart of the multi-hop intra-cluster unicast communications . . . . . . . . 43
24. Unicast of non-safety messages in a three-hop cluster . . . . . . . . . . . . . . . . . . 44
25. Showing how the traffic flow is dividing vehicles ahead in different direc-tions. The rightmost lane present an exit on the highway . . . . . . . . . . . . . . 48
26. CH, ID 1, is about to resign. So, it will choose vehicle x, y, or z to be anew CH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
27. A new vehicle i is trying to join a single-hop cluster by communicatingwith the cluster’s CH using mini-slot 0. Notice that vehicle i is travelingon the same direction as the cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
28. A new vehicle i is trying to join a two-hop cluster by communicating withthe cluster member j using mini-slot 0. Notice that vehicle i is travelingon the same direction as the cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
29. Two single hop clusters in range of each other, before merging . . . . . . . . . . 57
30. Closest vehicles from each cluster swapping IDs with their CHs duringthe process of merging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
31. The new CH for the new cluster that resulted of the merge . . . . . . . . . . . . 59
32. One single-hop cluster, after shrinking of a multi-hop cluster . . . . . . . . . . . 59

xi
33. Vehicles and highway directions in CDMA/TC-MAC. Vehicles and high-ways in the dark area are Left direction, while others are Right direction . 62
34. Three CDMA codes are needed for each direction in CDMA/TC-MAC toavoid having two different clusters in range of each other and using thesame CDMA code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
35. Two clusters are using the same CDMA code, Code 2. When the gapbetween both cluster is less than 300 m, a code conflict will be detectedand the recovery protocol will start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
36. Two adjacent clusters with less than 300 m gap are wishing to communi-cate. The process will be completed by exchanging several setup messagesbetween GW tail from cluster A and GW head from cluster B . . . . . . . . . . . . 67
37. Clusterhead changes vs. number of lanes in the highway after the first exit 75
38. Clusterhead changes vs. number of lanes in the highway after the secondexit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
39. TC-MAC frame based on maximum safety message size of 200 bytes andmaximum non-safety message size of 1,200 bytes. . . . . . . . . . . . . . . . . . . . . . 78
40. Percentage of missed direct messages for TC-MAC in a single-hop clus-ter based on the communication density. All vehicles in the cluster areengaged in communications during their own slot time on the SCHs . . . . . 81
41. Percentage of missed direct messages for TC-MAC in a single-hop clusterbased on the communication density. Half of the vehicles in the clusterare engaged in communications during their own slot time on the SCHs . . 82
42. Percentage of missed direct messages for TC-MAC in a single-hop clusterbased on the communication density. It shows the performance when allvehicles and half vehicles in the cluster are engaged in communicationsduring their own slot time on the SCHs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
43. Percentage of collisions during the CCHI for WAVE using a single-hopcluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
44. Reliability of safety messages in WAVE using a single-hop cluster . . . . . . . 85
45. Throughput of non-safety messages comparing to the communication den-sity using TC-MAC in a single-hop cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
46. Throughput of non-safety messages under different communication den-sities using WAVE in a single-hop cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87

xii
47. Percentage of missed direct safety/update messages for TC-MAC in atwo-hop cluster based on the communication density. Assuming that halfof the vehicles in the cluster are engage in any sort of communicationsduring their own slot time on the SCHs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
48. Percentage of collisions safety/update messages during the CCHI forWAVE using a two-hop cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
49. The switching between two halves in one TDMA frame in P2P file sharing.The pair of vehicles that are involved in P2P file sharing will listen to theCCH in first half of the first TDMA frame and will use the time slots onthe SCHs in the second half of the TDMA frame, and vice versa in thefollowing TDMA frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
50. An example of two vehicles A and B sharing a file under TC-MAC. Firsthalf granted time slots are in green color and the second half are in bluecolor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
51. Time to download 4 MB file using P2P file sharing scheme. There are amaximum of 58 slots available for borrowing. . . . . . . . . . . . . . . . . . . . . . . . . . 95
52. Time to download 8 MB file using P2P file sharing scheme. There are amaximum of 58 slots available for borrowing. . . . . . . . . . . . . . . . . . . . . . . . . . 96
53. Time to download 12 MB file using P2P file sharing scheme. There are amaximum of 58 slots available for borrowing. . . . . . . . . . . . . . . . . . . . . . . . . . 96

1
CHAPTER 1
INTRODUCTION
According to the World Health Organization (WHO) [6], approximately 1.3 mil-
lion people die each year on the world’s roads and between 20 and 50 million sustain
non-fatal injuries. Road traffic injuries are the leading cause of death among young
people, aged between 15 and 29. Many accidents may be avoided by having vehi-
cles communicating with each other to exchange messages to warn the drivers about
unsafe situations on the road. Moreover, the Texas Transportation Institute [7] re-
ported that in 2009 the cost of traffic congestion in the US was about $115 billion.
This cost based on the wasted time and fuel. The total hours wasted in traffic con-
gestion in the US alone is about 4.8 billion hours, and about 3.9 billion gallons of
fuel is wasted. Besides the economic cost, traffic congestion leads to more pollution
in our cities.
Vehicular Ad Hoc networks (VANETs) are an important component of Intelligent
Transportation Systems (ITS) [8], which apply information technologies in vehicles
and transportation infrastructure. VANETs enable the exchange of messages be-
tween vehicles and between vehicles and infrastructure, as shown in Figure 1. Such
communications aim to increase safety on the road, improve transportation efficiency
and provide comfort to drivers and passengers.
In the US, VANETs use 75 MHz of spectrum in the range of 5.850 to 5.925 GHz
specially allocated by the U.S. Federal Communications Commission for Vehicle-to-
Vehicle communication (V2V) and Vehicle-to-Infrastructure communication (V2I)
using Dedicated Short Range Communication (DSRC) technology [9]. The spectrum
band is divided into seven 10 MHz channels (Figure 2). Channel 178 is the control
channel (CCH), which is used for beacon messages, event-driven emergency messages,
and service advertisements. The other six channels are service channels (SCH) to
support non-safety messages.
The IEEE has developed the 1609 family of standards for Wireless Access in
Vehicular Environments (WAVE) [10]. In WAVE, the IEEE 1609.4 trial standard [2]
operates on top of IEEE 802.11p in the MAC layer. IEEE 1609.4 focuses on multi-
channel operations of a DSRC radio. There is a sync interval (SI) of the length of

2
V2V
communications
V2I
communications
RSU
RSU
Emergency
Event
Fig. 1. An example of VANETs
100 msec that consists of a CCH interval (CCHI) and a SCH interval (SCHI), each
separated by a guard interval, as shown in Figure 3. All radio devices are assumed
to be time-synchronized using Global Positioning System (GPS). During the CCHI,
all radios must be tuned to the CCH to broadcast updates and listen for messages
from neighbors and road-side units (RSUs). During the SCHI, vehicles may tune to
the SCH of their choice depending on the services offered. The reason for having the
length of the SI equal to 100 msec is that update messages from vehicles need to be
broadcasted at least once every 100 msec [11].
Several ongoing research projects supported by car manufacturers, governments
and academia, are establishing standards for VANETs, obtaining frequency spectrum
allocations, implementing protocols and applications, and running field trials. How-
ever, the widespread deployment of such technology poses several technical issues,
concerning architecture, routing, mobility, channel modeling, security, performance,
and applications definitions.
1.1 MOTIVATION
Although the primary purpose of VANETs is to increase safety on the roads by
running several safety applications, e.g., cooperative collision warning, VANETs can
also provide several non-safety applications, from notifications of traffic conditions

3
Ch 178
CCH
Ch 172
SCH
Ch 184
SCH
Ch 182
SCH
Ch 180
SCH
Ch 176
SCH
Ch 174
SCH
Critical
Safety
Of Life
Reserved
5.850
GHz
5.855
GHz
5.865
GHz
5.875
GHz
5.885
GHz
5.895
GHz
5.905
GHz
5.915
GHz
5.925
GHz
Control
Channel
High Power
Public
Safety
Fig. 2. US DSRC spectrum allocation
CCH
interval
SCH
interval
CCH
interval
SCH
interval
Guard interval
Sync period
100 msec
50 msec 50 msec
TimeGuard interval
= 4 msec
Sync period
100 msec
...
Guard interval
Guard interval
Guard interval
Fig. 3. Division of time into CCH intervals and SCH intervals, IEEE 1609.4 standard
to file sharing. Unfortunately, it has been shown that using WAVE VANETs cannot
support both safety and non-safety applications with high reliability at high traffic
densities. Either safety applications or non-safety applications must be compromised.
To maintain the 100 msec requirement of safety applications and ensure reliability,
the CCHI must be lengthened and the SCHI shortened [12].
As an ad-hoc network, a VANET cannot rely on specialized infrastructure, such
as Access Point, to support network stability. Each node in a VANET is required
to maintain its own connectivity to other nodes in the network. With the large
number of nodes and the lack of routers, a flat routing scheme, where each node
acts as a router, may cause serious scalability and hidden terminal problems. One
possible solution to these problems is hierarchical clustering, as illustrated in Figure4.
In addition, using clustering can lead to more node coordination and fewer nodes
interfering with each other.
A cluster is a group of nodes that can communicate without disconnection and

4
CM GNCH
Traffic
direction
GN GNCH GN CMCH
Cluster A Cluster B Cluster C
Fig. 4. Clustering envionment
that identify themselves to be part of a cluster. These nodes select a clusterhead CH
to coordinate the communication among themselves. Clustering in VANETs requires
selecting a CH that produces a stable cluster. Cluster stability is also affected by
the dynamics of the vehicles in the cluster. New vehicles joining the cluster and
other vehicles leaving the cluster change the topology of the cluster. Having a simple
clustering scheme in forming and maintaining clusters will save a significant amount
of time and channel bandwidth needed to complete this process.
Since safety applications of vehicular communication have stringent reliability
and delay requirements, giving each vehicle the time to send safety messages with-
out interfering with other vehicles is required. Time Division Multiplexing Access
(TDMA) is a technique that can be used to assign unique time slots to each vehicle
in the cluster. The goal of any assignment scheme is to make the process of assign-
ing slots easy and straightforward. Also, as important as the safety messages are,
non-safety messages need to be delivered even if there are a lot of safety messages.
1.2 OBJECTIVE
The main objective of this work is to design and implement a Medium Access
Control (MAC) protocol for V2V and V2I communications for VANETs. This pro-
tocol integrates the centralization approach of clusters and a new scheme for slot
reservations, where cluster members are assigned local IDs by the CH. In this tech-
nique, unlike WAVE, all vehicles are able to tune to the Control Channel (CCH)
or the Service Channels (SCHs) if needed during the time cycle. It is designed to
allow vehicles to send and receive non-safety messages without any impact on the

5
reliability of sending and receiving safety messages even if the traffic density is high.
In this work, I propose a dynamic TDMA slot assignment scheme for cluster-
based VANETs. In this scheme, the collision-free intra-cluster communications are
managed by the CH using local IDs. In addition, I propose a CDMA/TDMA hybrid
MAC protocol for inter-cluster communications.
As a result, I encounter three important problems. These problems are cluster
formation, cluster maintenance, and intra-cluster and inter-cluster communications.
In this work, I propose three algorithms to solve the addressed problems.
1.3 THESIS STATEMENT
TDMA slot reservation in cluster-based VANETs will improve the performance of
delivering non-safety messages with little impact on the delivery of safety messages.
This performance will be measured by the delivery delay and reception probability of
safety and non-safety messages compared to the current WAVE channel switching.
I also measure the overhead by counting the extra control messages required for
channel assignment and cluster maintenance.
1.4 CONTRIBUTIONS
The overall objective is to allow vehicles to send and receive non-safety messages
with little impact on the reliability of sending and receiving safety messages even if
the traffic density is high. This is accomplished through three tasks, which are the
main contributions of this work:
• A multi-channel cluster-based TDMA MAC protocol to coordinate intra-cluster
communications (TC-MAC). The proposed protocol can be used for clustering
management and communications. This protocol integrates the centralization
approach of clusters and a new scheme for slot reservation, using cluster mem-
bers’ local IDs. In this technique, all vehicles are able to tune to the CCH or
one of the SCHs if needed during the time cycle. In other words, the time cycle
is not divided into two different intervals, CCH Interval and SCH Interval as
with WAVE. Details will be discussed in Chapter 3.
• A CH election and cluster formation algorithm based on the traffic flow and
a cluster maintenance algorithm that benefits from our cluster formation algo-
rithm. Rather than considering some of VANET characteristics in the election

6
of the CH, my algorithm puts into account the traffic flow on the road. The
design and implementation of this CH election and cluster formation algorithm
shows fewer CH changes, which reduces the overhead of re-clustering and de-
livers an efficient hierarchical network topology. During the cluster formation
process, the cluster members will be assigned local IDs by the CH. Vehicles in
VANETs are allowed to move freely. Therefore, I propose a new cluster main-
tenance algorithm that handles topology changes caused by mobility changes.
The proposed algorithm takes advantage of the local IDs that are assigned in
our cluster formation algorithm. Details will be discussed in Chapter 4.
• A multi-channel cluster-based CDMA/TDMA hybrid MAC protocol to coordi-
nate inter-cluster communications. I propose a MAC protocol that enables
vehicles to communicate with vehicles in different clusters and with RSUs. In
addition, the hidden and exposed terminal problems are addressed by the pro-
posed protocol. Details will be discussed in Chapter 5.
1.5 OUTLINE
This work is organized as follows:
• Chapter 2 presents a background on VANETs and provides an overview of the
IEEE standards for VANETs. It also presents a study of already existing MAC
protocols for VANETs.
• Chapter 3 presents the TDMA slot assignment algorithms for intra-cluster com-
munications (TC-MAC).
• Chapter 4 presents the proposed CH election and the cluster formation algo-
rithms. It also presents the cluster maintenance algorithm.
• Chapter 5 presents the CDMA/TC-MAC hybrid protocol for the inter-cluster
communications.
• Chapter 6 presents an evaluation of the proposed system performance by using
extensive simulations. The results are studied and analyzed carefully.
• Chapter 7 presents an application using TC-MAC for peer-to-peer file sharing
in VANETs.

7
• Chapter 8 gives the summary and conclusion of my work.

8
CHAPTER 2
BACKGROUND AND RELATED WORK
In this chapter, I will outline the characteristics of VANETs, as well as the type
of messages in VANETs. Then I will give a background of IEEE standards for
MAC protocols for VANETs. I also will explain the Time Division Multiple Ac-
cess (TDMA) Code-Division Multiple Access (CDMA) as two different techniques
for channel partitioning. After that, I will review some CH election and cluster
maintenance algorithms. In the end, I will review some alternate MAC protocols for
VANETs.
2.1 CHARACTERISTICS OF VANETS
The specific characteristics of VANETs make their quantitative and qualitative
analysis particularly critical, especially when designing MAC protocols. Even though
VANETs are considered to be a class of Mobile Ad Hoc Networks (MANETs),
they have a number of specific characteristics that make many solutions for gen-
eral MANETs unsuitable for VANETs [13]. Some of the VANETs characteristics
that influence the design of an ideal MAC protocol are:
• Number of nodes: The node density of a VANET may vary. It can be small
as in rural areas or large as during rush hour in a large city. It is important
to have a MAC protocol that can deal with both cases. The main challenge in
rural areas is network disconnection, while scalability is the main challenge in
high density areas.
• High node mobility: Nodes in a VANET can move at very high speeds (160
km/h), which might lead to frequent disconnection among nodes. If one node
is moving at a very high speed (140 km/h) and connected to a node that is
moving at a very low speed (30 km/h), the lifetime of the link will be short.
• Predictable network topology: The movement of nodes in a VANET is somewhat
predictable due to the fact that node movement is constrained by the road
topology.

9
• Frequently changing network topology: Due to high node mobility, the network
topology in a VANET changes very frequently. It is important to have a MAC
protocol that can adapt to frequent changes in the topology in a seamless way.
• Availability of location information: Location information can be provided by
having a Global Positioning System (GPS) receiver on board. Having such
information for communications not only can reduce delivery latency of message
dissemination but can increase system throughput.
• Infrastructure support: Unlike most MANETs, VANETs can take advantage of
infrastructure on the roads. This could enhance the performance of VANET
MAC protocols.
• No power limitation: Unlike MANET nodes, nodes in VANET have no energy
limit. They depend on a good power supply (e.g. vehicle battery). This allows
nodes to have better computation resources.
2.2 MESSAGES AND TRANSMISSIONS IN VANETS
Besides the characteristics of VANETs, MAC protocol design should consider
different types of messages and their dissemination requirements.
2.2.1 TYPES OF MESSAGES
In VANETs, there are three types of messages: periodic messages, event-driven
messages, and informational messages. These three types of messages have different
priorities but must share the same bandwidth.
• Periodic Messages are generated to inform nearby vehicles about the vehicles
current status, for example, speed, position, and direction [14]. Because in-
formation in periodic messages is important to all vehicles surrounding the
sender, these messages need to be broadcasted frequently. Because of this, pe-
riodic messages may cause the broadcast storm problem, leading to contention,
packet collisions, and inefficient use of the wireless channel [15].
• Event-driven Messages are emergency messages sent to other vehicles based on
unsafe situations that have been detected. This type of messages has a very
high priority. There are several applications in VANETs that use this type of

10
message, for example, Collision Avoidance Systems (CCA) [16]. The challenge
with this type of message is that the sender needs to make sure that all vehicles
intended to benefit from these messages receive them correctly and quickly [17].
• Informational Messages are non-safety application messages. They help in
making driving more convenient and comfortable. An example of this type of
message is one facilitating Internet access to the vehicles [18]. Unlike the other
type of messages, this type does not require high priority, but may require a
high transmission rate.
2.2.2 TRANSMISSIONS
Most of the transmissions in VANETs are broadcast. Broadcast wireless trans-
missions do not use MAC-layer acknowledgments (ACKs). ACKs are normally sent
by a receiver for each frame successfully received. When a node fails to receive an
ACK in a certain amount of time, it doubles its CWmin, which increases the amount
of time it will likely have to wait before sending the retransmission. Since broadcast
has no ACKs and therefore no retransmissions, CWmin is never adjusted. Because of
this, all nodes will have the same CWmin, which increases the probability that two
nodes will pick the same back-off timer value (BT) value. IEEE 802.11 includes a
mechanism (RTS/CTS) to prevent collisions for unicast transmissions, but unfortu-
nately most VANET transmissions are beacons sent via broadcast and cannot use
RTS/CTS.
2.3 IEEE STANDARDS FOR MAC PROTOCOLS FOR VANETS
In the US, the Federal Communication Commission (FCC) has allocated 75 MHz
of spectrum at 5.9 GHz for Dedicated Short-Range Communications (DSRC) [9],
which provides high-speed communication between the vehicles and road-side units
(RSUs). DSRC is divided into 7 channels, each 10 MHz wide, as shown in Figure
5. Channel 178 is the control channel (CCH), which is used for beacon messages,
event-driven emergency messages, and service advertisements. The remaining six
service channels (SCHs) support non-safety applications provided by RSUs. The
IEEE has completed the 1609 family of standards for the Wireless Access in Vehicular
Environments (WAVE) standard [10] for vehicular communications. In the remainder

11
Ch 178
CCH
Ch 172
SCH
Ch 184
SCH
Ch 182
SCH
Ch 180
SCH
Ch 176
SCH
Ch 174
SCH
Critical
Safety
Of Life
Reserved
5.850
GHz
5.855
GHz
5.865
GHz
5.875
GHz
5.885
GHz
5.895
GHz
5.905
GHz
5.915
GHz
5.925
GHz
Control
Channel
High Power
Public
Safety
Fig. 5. US DSRC spectrum allocation
of this section, we explain the WAVE standard as well as the challenges and issues
of WAVE MAC.
2.3.1 THE IEEE 1609 WAVE STANDARDS
IEEE 1609 WAVE is family of standards for vehicular communication encom-
passing vehicle-to-vehicle as well as vehicle-to-infrastructure communications [10].
WAVE specifies the following standards, as shown in Figure 6:
• IEEE 1609.1 specifies the services and interfaces of the WAVE Resource Man-
ager application, [19].
• IEEE 1609.2 defines secure message formats and processing [20].
• IEEE 1609.3 presents transport and network layer protocols, including address-
ing and routing, in support of secure WAVE data exchange [21].
• IEEE 1609.4 specifies MAC and PHY layers [2], which are based on IEEE
802.11. This is the main focus of this work.
2.3.2 IEEE 1609.4 STANDARDS
In WAVE, the IEEE 1609.4 trial standard [2] operates on top of the IEEE 802.11p
in the MAC layer. IEEE 1609.4 focuses mainly on dealing with multi-channel opera-
tions of DSRC radio, as shown in Figure 7. There is a sync interval (SI) that consists
of a CCH interval (CCHI) and a SCH interval (SCHI), each separated by a guard
interval, as shown in Figure 8. All radio devices are assumed to be synchronized

12
Application (Resource Manger)
Application (Security Services)
Transport
UDP/TCP
Networking
IPv6
LLC
MAC
PHY
WSMP
IEEE 1609.1
IEEE 1609.2
IEEE 1609.3
IEEE 802.2
IEEE 1609.4 (Multi-
Channel)
IEEE 802.11P
IEEE 802.11P
Upper MAC
Lower MAC
Fig. 6. The WAVE Protocol stack
using Global Positioning System (GPS). During the CCHI, all radios must be tuned
to the CCH to broadcast updates and listen for messages from neighbors and RSUs.
During the SCHI, vehicles may tune to the SCH of their choice depending on the
services offered.
The standard defines the length of the SI as 100 msec, based on the desire of
having 10 safety messages sent per second. This desire came from the allowable
latency requirements of Life-Critical safety applications, which is 100 msec. It also
defines a Guard Interval (GI) at the start of each CCHI and SCHI. The purpose of
the GI is to account for the channel switching. Currently, the value of the GI is from
4 to 6 µsec, which is the time overhead for a radio to be tuned to and made available
in another channel.
2.3.3 THE IEEE 802.11P STANDARD
The IEEE 802.11p [3] standard is the foundation of the IEEE 1609 WAVE family
of standards. It defines the physical and the medium access control layers. The

13
LLC
MAC (with Channel Coordination)
Channel Router
Channel Selector and Medium Contention
CHH (WSMP data only)
Internal Contention
AIFS[ACI]
CW[ACI]
TXOP[ACI]
ACI=3ACI=2ACI=1ACI=0
AIFS[ACI]
CW[ACI]
TXOP[ACI]
AIFS[ACI]
CW[ACI]
TXOP[ACI]
AIFS[ACI]
CW[ACI]
TXOP[ACI]
SCH (WSMP and/or IP data)
Internal Contention
AIFS[ACI]
CW[ACI]
TXOP[ACI]
ACI=3ACI=2ACI=1ACI=0
AIFS[ACI]
CW[ACI]
TXOP[ACI]
AIFS[ACI]
CW[ACI]
TXOP[ACI]
AIFS[ACI]
CW[ACI]
TXOP[ACI]
Transmission Attempt
802.11p MAC (CCH)
802.11p MAC (SCH)
Fig. 7. Reference architecture of the MAC channel coordination. (Figure 4 of IEEETrail-Use Standard for Wireless Access in Vehicular Environments (WAVE)-Multi-channel Operation)
CCH
interval
SCH
interval
CCH
interval
SCH
interval
Guard interval
Sync period
100 msec
50 msec 50 msec
TimeGuard interval
= 4 msec
Sync period
100 msec
...
Guard interval
Guard interval
Guard interval
Fig. 8. Division of time into CCH intervals and SCH intervals, IEEE 1609.4 standard(based on [2])

14
DIFS
Immediate access when
Medium is idle >=DIFSDIFS
SIFS
PIFS
Busy
Medium
Contention Window
Defer AccessSelect slot and decrement backoff
as long as medium stays idle
Slot Time
Backoff Window Next Frame
Fig. 9. Distributed coordination function for channel access. (Based on figure from[3])
WAVE stack uses IEEE-802.11p, which is based on CSMA/CA (Carrier Sense Mul-
tiple Access/Congestion Avoidance) mechanism to access the medium as defined in
IEEE 802.11, see Figure 9. This medium access protocol checks the channel status
before transmitting frames from the MAC layer. If the channel is idle and during the
a DIFS (DCF Interframe Space) time interval, the frame can be transmitted. On the
other hand, if the channel is busy, or becomes busy during the DIFS time interval,
the transmission is deferred using the backoff mechanism. The purpose of the backoff
mechanism is to avoid a collision with other node that is currently transmitting on
the same medium. IEEE-802.11p includes the QoS amendments of IEEE-802.11e.
Recently, IEEE has completed work on the 802.11p, local area network standard
that employs IEEE 802.11e Enhanced Distributed Channel Access (EDCA). Figure
7 gives an overview of the EDCA architecture and the type of channels that are sup-
ported, CCH and SCHs. For the IEEE 802.11p, different Arbitration Inter Frame
Space (AIFS) and Contention Window (CW) values are chosen for different applica-
tion categories (ACs). There are four available data traffic categories with different
priorities: background traffic (BK), best effort traffic (BE), voice traffic (VO) and
video traffic (VI). Each data traffic category has its own queue; four different queues
for each channel. Table 1 shows the parameter settings for different application
categories in IEEE 802.11p .
Based on the nature of VANET, IEEE 802.11p has to have different MAC oper-
ations than IEEE 802.11. Here is a brief description of some of the changes at IEEE

15
TABLE 1. IEEE 802.11p parameter settings for different applications categories
AC CWmin CWmax AIFSN
VI 3 7 2
VO 3 7 3
BE 7 225 6
BK 15 1023 9
802.11 MAC [22]:
• WAVE mode: Since safety communications in VANETs demand fast data ex-
change, IEEE 802.11 MAC operations are too time-consuming. Scanning chan-
nels for the beacon of a Basic Service Set (BSS) and performing multiple hand-
shakes to establish the communications is not affordable. Therefore, in the
WAVE mode, vehicles are in the same channel and the same BSSID in order
to communicate without any additional overhead.
• WAVE BSS: The WAVE standard defines a new BSS type, WAVE BSS
(WBSS). When a vehicle/RSU wants to form a WBSS, it transmits an on-
demand beacon. This beacon is of a specific format and used to advertise a
WAVE BSS. The process taken to join the WBSS or not is done by the upper
layers. Also, the WAVE advertisement includes all the information needed by
the receiver to configure itself into a member of the WBSS. The way WBSS
works leads to low setup overhead by discarding all association and authenti-
cation processes.
2.3.4 CHALLENGES AND ISSUES OF WAVE MAC
As currently envisioned, WAVE allows for the communications of safety and non-
safety applications through a single DSRC radio. Unfortunately, it has been shown
that DSRC cannot support both safety and non-safety applications with high relia-
bility at high traffic densities. Either safety applications or non-safety applications
must be compromised. To maintain the 100 msec requirement of safety applications
and ensure reliability, the CCHI must be lengthened and the SCHI shortened. Wang
and Hassan [12] studied this scenario, requiring 90% and 95% reliability for CCH

16
messages with different traffic densities. Their results indicate that as traffic density
increases, ensuring CCH reliability requires compromising SCH throughput. At high
densities, to avoid compromising non-safety applications, the SI would need to be
lengthened. This would result in fewer beacon messages sent per second, compro-
mising safety.
2.4 TDMA AND CDMA TECHNIQUES
In this section, I will give a brief description of TDMA and CDMA techniques.
First, I will describe TDMA and its main advantage. Then I will describe CDMA.
2.4.1 TDMA
Time Division Multiple Access (TDMA) is a technique used to enable multiple
nodes to transmit on the same frequency channel. It divides the signal into different
time frames. Each frame is divided into several time slots, where each node is assigned
to a time slot to transmit. The length of the time slot may vary, based on the needs
of the node assigned to it. For example, if node i needs to transmit on the channel,
it will use its own time slot to transmit. The nodes will transmit in rapid succession,
each using its own time slot, as shown in Figure 10.
The main advantage of TDMA is reducing interference between nodes. However,
it adds slot allocation complexity.
2.4.2 CDMA
Code Division Multiple Access (CDMA) is a spread spectrum multiple access
technique. A spread spectrum technique spreads the bandwidth of the data uniformly
for the same transmitted power. A spreading code is a pseudo-random code that has
a narrow Ambiguity function, unlike other narrow pulse codes. In CDMA a locally
generated code runs at a much higher rate than the data to be transmitted. Data
for transmission is combined via bitwise XOR (exclusive OR) with the faster code.
One of the advantages of CDMA is that it can achieve much higher channel band-
width efficiency for a given spectrum allocation. It also overcomes strong intentional
interference.
2.5 CLUSTERING

17
1 3 4 5 62
3
Guard Periods
Data stream divided
into Frames
Frames divided
into time slots
Time slot assign to node
3 and contains data
Fig. 10. TDMA frame structure showing a data stream divided into frames and theframes divided into time slots, assuming that we have 6 nodes in the TDMA frame
Clustering is the process of separating the overall network into organized par-
titions called clusters. The cluster is conceptual structure where a group of nodes
form sub-networks on the road. Nodes in a cluster are classified into three different
types, Clusterhead (CH ), Cluster Members (CM ), and Gateway Nodes (GN ). A
clusterhead, CH, is an elected node that is responsible for establishing and organiz-
ing the cluster. These responsibility may include routing, relaying and scheduling of
intra-cluster communications, and channel assignment for other nodes in the cluster
[23]. Cluster members, CM, are normal nodes that belong to a cluster. CMs may
participate in routing, when asked by the CH. All CMs are within one-hop or multi-
hop communications range of the CH, thus the potential cluster size increases with
the transmission range. Gateway Nodes, GN, are CMs elected by the CH to manage
communications with adjacent clusters. The GN belongs to more than one cluster,
acting as a bridge between clusters [24], as shown in Figure 11.
2.5.1 CLUSTER FORMATION IN MANETS

18
Traffic
direction
CMCH
Traffic
direction
GN CH CM
GN
Fig. 11. Two clusters communicating with each other through Gateway nodes (GN)that are assigned by the clusterhead (CH) of each cluster
A Mobile Ad hoc NETwork (MANET) is a self-organizing wireless network of
mobile nodes, which can communicate without pre-existing infrastructure. MANETs
can have either a flat topology or a hierarchical clustered topology. In large networks,
a flat topology faces scalability issues [25]. Routing in MANETs requires flooding to
find routes and in large networks this flooding leads to severe congestion. This issue
gets more severe as the network is more mobile and the topology changes frequently.
One of the solutions for the scalability issue in MANETs is using a cluster-based
approach [26]. Clustering provide scalability by creating a backbone network of
nodes. It also provides stability for dynamic networks.
There are several algorithms for cluster formation in MANET. The main task
of the cluster formation process is to elect a CH. One of the clustering algorithms
is Lowest-ID. The Lowest-ID clustering algorithm [27] is based on selecting as the
CH the member with the lowest ID, assuming each node has unique ID. Simply,
each node broadcasts its ID to other nodes in range. When a node receives the
messages from other nodes, it determines the CH as the node with the lowest ID.
This algorithm is very simple and stable for general MANET applications.
Another clustering algorithm is Highest-Degree. The Highest-Degree algorithm
[27] selects the CH based on the node connectivity to the other nodes in the same
cluster. Each node knows the number of other nodes in range and then broadcasts
this knowledge to the others. The node with the maximum number of neighbours is
selected as the CH. This algorithm is one of the basic techniques for CH formation
in MANETs.
2.5.2 CLUSTER FORMATION IN VANETS

19
Several algorithms have been introduced for cluster formation in VANETs. Some
of these algorithms were first developed for MANETs. For example, Lowest-ID al-
gorithm seems to be simple and stable for MANET; however, this algorithm is not
always stable for VANET because the movement of the vehicles is not considered.
The Highest-degree algorithm is also not ideal for VANETs. It is not stable for
VANETs due to the nature of the nodes movement. If the CH changes its behaviour
at any moment, the connectivity level could change dramatically.
To have a good VANET clustering algorithm, we have to consider the char-
acteristics of VANET. The Utility Function algorithm [28] is a VANET clustering
algorithm that performs better than the previous two algorithms, Lowest-ID and
Highest-Degree. This algorithm is based on a multiple-metric weighting algorithm,
considering speed, velocity and position. In the process of the CH selection, the
closest position to the average and the closest velocity to the average of all proximal
vehicles are calculated along with connectivity level to determine the most stable
CH. Periodically, each node broadcasts its status to other nodes in range. When the
node receives this information, it starts to evaluate each node by using the utility
function. The node with the highest value is chosen to be the CH. In a highway
environment, this algorithm has been shown to provide better results than the clas-
sic MANET algorithms. It puts the position and velocity, which are major VANET
characteristics, into consideration. However, it still ignores the traffic flow on the
road. For example, in an urban scenario where are many intersections, if the CH is
located on the leftmost lane, it has to turn left even if most of the vehicles are going
straight. In this case, the vehicles will need to perform the process of CH selection
again.
Rawshdeh and Mahmud [29] proposed grouping vehicles based on the mobility
patterns. Vehicles with close speeds will be grouped together in one cluster. But this
might lead to having clusters overlap.
We introduce a new cluster formation algorithm. This scheme aims to extend the
life of the CH. We take advantage of knowing the exact lane of vehicles on the road
and then broadcast this knowledge to other nearby vehicles to determine the optimal
CH. Our method of selecting the CH is the key to achieving a more stable cluster.
2.5.3 CLUSTER MAINTENANCE ALGORITHMS

20
Based on the dynamic nature of vehicles in VANETs and the changes in the net-
work topology, clusters must be updated frequently to maintain the stability of the
network. Cluster maintenance is a very important process in any clustering algo-
rithm. It will be performed more often than cluster formation. The cluster mainte-
nance process should be done in a manner that it does not add much communication
overhead.
A significant amount of research on cluster maintenance has been done in
MANETs [30, 31]. VANETs, however, have different mobility characteristics than
MANET. So, applying MANET algorithms in VANET is not always successful.
Venkataraman et al. [30] proposed a clustering algorithm that performs formation
and maintenance in MANET. In the process of maintenance, if the CH is leaving
the cluster, the CH selection process will be performed again. This will consume a
lot of time and channel bandwidth. It is better to do the CH changes in a way that
does not require a lot communications.
We introduce a new cluster maintenance algorithm that solves the issues of the
network topology changes. It addresses such as new cluster member(s) joining, cur-
rent cluster member(s) leaving the cluster, clusters merging, and CH changing. All
the problems mentioned are going to be solved with a low amount of overhead. We
aim to design an algorithm that makes changes in the topology unseen by most of
the cluster members. For example, when the CH is about to leave the cluster, it will
find a stable CH candidate. Then, the current CH will switch local IDs with CH
candidate. After switching, a new more stable CH will take over with the need of
performing the CH selection process again.
2.5.4 CLUSTER-BASED MAC PROTOCOLS
A significant amount of research has been spent in developing new cluster-based
MAC protocols, [26, 32, 33, 34, 35, 36, 37]. Gunter et al. [26] proposed schemes
where the CH takes on a managerial role and facilitates intra-cluster communication
by providing a TDMA schedule to its CMs. Based on the amount of data the CMs
have to send, the CH assigns a bandwidth and time slots to the CMs in each TDMA
frame. Su and Zhang [37] proposed a scheme where adjacent clusters are assigned
different CDMA codes to avoid interference between clusters. This work shows a
substantial reduction in probability of message delivery failure, when compared to
the traditional 802.11 MAC. The disadvantages of this work are that it uses two

21
transceivers. It also reserves channels for specific tasks; so if there is no activity on
these channels, the channels will be wasted.
Much of the recent VANET research discussing cluster-based MACs and routing
schemes also present a low-maintenance clustering algorithm. Each of these algo-
rithms works essentially the same way, whereby nodes periodically transmit HELLO
beacons to indicate their present state. States can be one of the following: Unde-
cided, CH, Cluster Member, and sometimes Gateway. An undecided node will join
the first CH that it hears a HELLO beacon from (or joins all CH if Gateway nodes
are allowed). If the node does not hear from a CH within a given time period, it
will become a CH itself. In addition, protocols are introduced to deal with colliding
clusters, which occurs when two CH come within range of one another. During a
cluster collision, one CH decides to give up its status to the other. This technique is
used by Su and Zhang [37] without regard for mobility. Gunter et al. [26] proposed
a scheme where mobility is addressed during cluster collision, whereby the winning
CH is the one with both lower relative mobility and closer proximity to its members.
Alternatively, Kayis and Acarman [36] address mobility by first classifying nodes into
speed groups, such that nodes will only join a CH of similar velocity.
2.6 ALTERNATE MAC PROTOCOLS FOR VANET
The issues of MAC protocols for WAVE, as described above, led researchers in
developing new MAC protocols for VANETs. In general, MAC protocols can be
classified into three different categories: channel partitioning, random access, and
taking turns [38]. In this section, we survey some of the most recent research efforts
on MAC protocols for VANET. We will discuss the MAC protocols based on the
categorization above.
2.6.1 CHANNEL PARTITIONING
Channel partitioning MAC protocols are based on sharing the channel efficiently
at high uniform load. In MAC layer, channel partitioning is done using the following
methods: Time-Division Multiple Access (TDMA), Frequency-Division Multiple Ac-
cess (FDMA) and Code-Division Multiple Access (CDMA). In this section, we will
discuss some of the MAC protocols for VANET designed using TDMA.
In VANETs, TDMA is used to enable multiple nodes to transmit on the same
frequency channel. It divides the signal into different time frames. Each time frame is

22
divided into several time slots, where each node is assigned to a time slot to transmit
[39]. The length of the time slot may vary, based on the needs of the node assigned
to it. The nodes will transmit in rapid succession, each using its own time slot.
The main advantages of protocols developed under this category are reducing
interference between nodes and providing fairness. However, they add allocation
complexity and suffer from inefficient channel utilization at low loads.
Yu and Biswas [4] proposed Vehicular Self-Organized MAC (VeSOMAC), a MAC
protocol for inter-vehicular wireless networking using DSRC. They designed a self-
configuring TDMA slot reservation protocol capable of inter-vehicle message delivery
with short and deterministic delay bounds. To achieve the shortest delay, vehicles
determine their TDMA time slot based on their location and movement on the road.
Also, the TDMA slot assignment is designed to be in the same sequential order with
respect to the vehicles physical location.
As shown in Figure 12, if vehicle 1 detects an emergency event that needs to
be disseminated to other vehicles behind it, the message will go from vehicle 1 to
vehicle 5 through vehicles 2-4; assuming that each vehicle is in range of only one
vehicle ahead and one vehicle behind. Also there is an assumption that as soon as
the message is transmitted, it can be sent by the next vehicle without processing
or propagation delay. If the TDMA slot assignment is not based on the physical
location of the vehicle in the platoon 1-2-3-4-5, it may take more than one TDMA
frame for the emergency message to reach vehicle 5. For example, we show an
alternate assignment of 4-3-2-1-5 as shown in Figure 13, vehicle 1 is assigned to a
time slot that is after the time slot assigned to vehicle 2. That means vehicle 2 will
finish sending to its neighbors using its time slot before it hears the message from
vehicle 1 in time frame 1. The same case applies when vehicle 2 tries to send to
vehicle 3. We notice that in order for the message to be delivered from vehicle 1 to
vehicle 5, four time frames are needed. Using the VeSOMAC protocol will minimize
delivering the message from vehicle 1 to vehicle 5 to only one time frame by using
vehicle location for the time slot assignment, as shown in Figure 14.
To solve the direct and hidden terminal collisions in VANET, VeSOMAC needs
to satisfy timing constraints where no two one-hop or two-hop neighbors slots can
overlap. It also uses an in-band header bitmap to exchange slot allocation information
among vehicles. To achieve faster message delivery, VeSOMAC uses an ordering
constraint where the vehicle ahead will be assigned to an earlier time slot than the

23
Traffic direction
245 3 1Traffic direction
Fig. 12. Highway scenario where the first vehicle needs to disseminate an emergencymessage. (Based on figure from [4])
1234 5 1234 5 1234 5 1234 5
Frame 1 Frame 2 Frame 3 Frame 4
Time
Fig. 13. TDMA slot assignment without using VeSOMAC, regular TDMA
vehicle behind it in the platoon.
In this protocol, the process of assigning time slots is done without using infras-
tructure or virtual schedulers such as a leader vehicle. However, the assumption of
forwarding messages without processing time or propagation delay is unrealistic. It
shows that if the message needs to be delivered from the tail to the head of the
platoon, it will need a time frame for each hop. So far, VeSOMAC does not explain
the communication between vehicles and RSUs.
Omar et al. [5] proposed a multichannel MAC protocol for VANETs, called
VeMAC, to reduce interference between vehicles and reduce transmission collisions
caused by vehicle mobility. VeMAC is based on a TDMA scheme for inter-vehicle
communication. Vehicles in both directions and RSUs are assigned to time slots in
the same TDMA time frame. Also, VeMAC is designed based on having one control
4321 5 4321 5 4321 5 4321 5
Frame 1 Frame 2 Frame 3 Frame 4
Time
Fig. 14. TDMA slot assignment with VeSOMAC

24
channel and multiple service channels in the network (as with DSRC/WAVE).
VeMAC assumes that there are two transceivers on each vehicle and that all vehi-
cles are time synchronized using GPS. The first transceiver is assigned to the control
channel, while the second transceiver is assigned to the service channels. Vehicles will
use the control channel to transmit two types of messages: high priority messages
(such as safety messages) and control messages for slot assignment. Since VeMAC
considers vehicles in opposite directions, vehicles are said to be either travelling in the
right (R) or left (L) direction. With the information provided by GPS, vehicles can
determine their direction; if a vehicle is moving from west to east (north to south),
it is in the right direction (R) and opposite vehicles are in the left direction (L), as
shown in Figure 15. The time frame in VeMAC is divided into three different slots
sets, L, R, and F, as shown in Figure 16. Vehicles in the right direction (R) will
be assigned to time slots in the time frame from the R slot set, vehicles in the left
direction (L) will be assigned to time slots from the L slot set, while RSUs will use
slots in the F slot set.
In VeMAC, each vehicle is guaranteed to access the control channel once per
frame. Also, vehicles have equal opportunities to announce for services provided
on the service channels. To avoid the hidden terminal problem, each vehicle in
VeMAC includes in the header of each packet transmitted on the CCH the following
information: the time slots used by the vehicle on the SCH, the time slot used by
each neighboring vehicle on the CCH, the time slots used by each neighboring vehicle
on the SCH, and the position and the current direction of the vehicle. By using this
information, each vehicle can determine the set of time slots used by other vehicles
within its two-hop range, which will help on avoiding the hidden terminal problem.
2.6.2 RANDOM ACCESS
Random access MAC protocols, also known as contention based protocols, are
based on the notion of CSMA. The goal of MAC protocols is to increase throughput,
so protocols under this category aim to keep packet collisions to a minimum. The
advantage of random access protocols is that they are not sensitive to underlying
mobility and topology changes. So, vehicle movement does not impose any reconfig-
uration overhead due to the network topology changes. Also, CSMA protocols are
efficient in low load scenarios. However, in networks such as VANET, the hidden

25
North
South
EastWest
Left
Direction
Right
Direction
Fig. 15. Vehicles directions in VeMAC. Vehicles in the dark area are Left direction,while others are Right direction
L
Time
Frame Frame
R F
Fig. 16. TDMA time frame in VeMAC shows L, R and F sets. (Based on figure from[5])

26
TABLE 2. Priority scheme with 4 levels (Based on table from [1])
Priority Level Vehicle Range Message Type
Level 0 Far General
Level 1 Medium General
Level 2 Low General
Level 3 Close Emergency
terminal problem and exposed terminals affect the system performance. Several ran-
dom access MAC protocols for VANETs have been proposed, some of which will be
described below.
Yang et al. [1] proposed carrier sense multiple access with priority and polling
(PP-CSMA) as a MAC protocol for VANETs that is based on a priority scheme
in CSMA using different backoff time spacing (BTS). The authors claim that their
protocol will provide high priority messages with fast access to the medium.
PP-CSMA proposes the prioritization scheme as a combination of the closeness of
the transmitting vehicle to the receiving vehicle and the message type. The position
of the transmitting vehicle to the receiving vehicle will determine the vehicle range
(far, medium, low, and close); if the range is short, the priority gets higher. Also, the
type of message (emergency or general) will have an effect on the priority; emergency
messages have higher priority than general messages. Table 2 shows four different
levels of priority, the high priority level backs off for the least amount of time.
Besides the priority scheme, the PP-CSMA protocol implements a polling scheme
in which the receiving vehicle polls only vehicles with the highest priority level avail-
able. Each vehicle maintains a polling table that holds information about other
vehicles positions. If a vehicle has an emergency message to be sent, it generates a
tone, which is out of the frequency band used for data transmission. If the vehicle
is in the receivers polling table, the receiver will clear for the sender to transmit the
message. If the polling vehicle does not generate a tone, the receiver vehicle will
know it is not an emergency message. The PP-CSMA protocol guarantees that the
highest priority messages will always have access to the medium faster than the low
priority messages. However, the authors did not mention broadcasting, which is an
important challenge in VANET.
In a different work, Suthaputchakun and Ganz [40] proposed a MAC protocol for

27
TABLE 3. Different message priorities with parameters (Based on table from [40])
Priority
LevelType Example CWmin CWmax AIFS
Num. of
Repet.
Level 1 AccidentAir bag
sensorCWmin/4 CWmin/2 2 3
Level 2Possibility
of Accident
Thermal
sensorCWmin/2 CWmin 3 1
Level 3 WarningSurface
conditionCWmin CWmax 3 1
Level 4 GeneralTraffic
reportCWmin CWmax 7 1
VANETs that is based on different message priorities, as in IEEE 802.11e EDCA
MAC protocol, with a repetitive transmission mechanism. This protocol aims to
increase the communication reliability by using the appropriate number of repetitions
per priority class.
Since most of the communications in VANET are broadcast messages with no
RTS/CTS or acknowledgment, the network reliability can be low. To solve this
problem, the authors proposed a mechanism of retransmission the messages based
on the priority of the message. Table 3 shows the priority levels as well as the number
of repetitions for each level.
Jiang et al. [41] proposed a set of protocols for safety communications in VANETs.
They define three different protocols: CCH congestion control protocol, broadcast
performance enhancement protocol, and concurrent multichannel operation protocol.
These protocols are designed to address the issues of the current standard and meet
the requirements of safety communications in VANETs.
The CCH congestion control protocol is designed around adjusting the generation
rate of routine safety (periodic) messages and the transmission power. Based on the
communication density [42], vehicles should be able to calculate the generation rate
and transmission power of routine safety messages which will maintain a reasonable
CCH load. These adjustments are done by each vehicle individually. Each vehicle
will listen and understand the targeted channel usage, and then ensure that its share
of the channel will keep a reasonable channel congestion level.

28
For the broadcast performance enhancement, the authors proposed a mechanism
that aims to ensure the best possible reception rate for the event safety (event-driven)
messages. The way it works is by the sending vehicle collecting feedback from other
vehicles on its recent safety message. This feedback will help the safety application(s)
on retransmitting the safety message, if needed. The feedback from other vehicles is
provided by Piggyback some acknowledgements in their safety messages [41]. For the
acknowledgements, vehicles will include the following information in each outgoing
safety message: senders position, the intended range of reception, a randomly gener-
ated message ID, IDs of most recently received messages, and the reception time of
the earliest message in the acknowledgement list.
In the concurrent multichannel operation protocol, the authors intend to increase
the level of SCHs utilization, for non-safety messages, with satisfying the safety
messages requirements. In VANETs, channel switching between CCH and SCHs is
operated every 100 msec. Vehicles will operate the switching in order to listen to
safety and non-safety messages; if the number of safety messages is high, non-safety
messages will have less time to be transmitted. To increase the SCHs utilization, this
protocol is built on the concept that listening to all safety messages is not required if:
(1) if routine safety messages from all nearby vehicles are heard every few seconds,
and (2) all event safety messages from nearby vehicles are received without excessive
delay. To do that, the authors used Peercast. The Peercast concept relies on trusting
peer vehicles description of recent control channel messaging activities. The following
steps will describe the Peercast concept: (1) each vehicle must switch to the CCH
every time it has a safety message to transmit, (2) each vehicle must switch to the
CCH (e.g. every 100 msec) to hear a few safety messages from its neighbors, (3)
while on the CCH: (a) if it hears no safety messages, it may switch back to SCH, (b)
else, if it hears an event safety message, it passes it to safety applications and may
switch to SCH, (c) else, if it hears an event safety message with unknown ID, it must
stay on CCH to capture the repetition of the message before switching back to SCH.
(4) each vehicle must switch to CCH every time a safety application requested, (5)
each vehicle must switch to CCH every a few second for a short period of time to
reorient itself with other vehicles routine messages.
2.6.3 TAKING TURNS

29
RMN RFN SDN
DNTHN
Fig. 17. Token ring in MCTRP with different types of vehicles in the proposedprotocol
Taking turns MAC protocols use either polling (master-slave) or token ring tech-
niques. Such techniques provide fairness by giving each node a turn to transmit.
They also provide a real time bandwidth allocation. If the node is not transmitting
during its turn, the time will be not wasted at the current node. We describe an
example of a token-ring based MAC protocol for VANETs in this section.
Bi et al. [43] proposed a multi-channel token ring MAC protocol for inter-vehicle
communications in VANET (MCTRP). The protocol aims to reduce the delay of
safety messages and improve the dissemination of non-safety messages, based on
the multi-channel structure defined in IEEE 802.11p. This can be achieved through
adapting multiple rings operating on different service channels.
MCTRP is designed to support more than one token ring at a time. These rings
are formed according to the velocity of vehicles and the road conditions. As shown
in Figure 17, vehicles forming one ring may have different states: (1) ring founder
node (RFN): a node that sets up a ring and has the authority to cancel the ring,
adding new nodes to the ring, and deleting nodes from the ring; (2) token holder node
(THN): a node that in the ring and holds the token; (3) ring member node (RMN):
a node in the ring, but does not hold the token. Vehicles that are not members of
a ring may also have different states: (1) semi-dissociative node (SDN): a node that
received the joining invitation from the RFN; (2) dissociative node (DN): a node
that does not belong to any ring and not in the process of joining any ring.
Vehicles in MCTRP are equipped with two transceivers, I and II. All vehicles in
the DN state operate over channel 178 using transceiver I, while other vehicles (non-
DN) simultaneously operate over channel 178 using transceiver I and over one of the
service channels over transceiver II. All vehicles in the system are time synchronized

30
using GPS.
MCTRP employs three different sub-protocols for resource utilization: a ring co-
ordination protocol, an emergency message exchange protocol, and a data exchange
protocol. The ring coordination protocol contains several processes for ring manage-
ment, such as ring initialization, joining, leaving, ring update, and ring termination.
The emergency message exchange protocol is designed to broadcast emergency mes-
sages as fast and reliable as possible. That can be done in four steps: (1) when a
RMN detects an accident, it transmit an emergency message to the RFN by adopt-
ing CSMA CA (with Radio-II during the safety period); (2) a RFN replies with an
acknowledgment to the sender RMN, and then broadcasts the message to all other
RMNs (with Radio-II for intra-ring notification); (3) at the same time, the RFN
broadcasts the message to its neighboring DNs and other RFNs (with Radio-I for
inter-ring notification); (4) the other RFN rebroadcast the emergency message to its
RMNs. The data exchange protocol is designed on having to data buffers in each
node. The intra-ring data buffer (IADB) holds packets to be transmitted to other
RMNs in the same ring, and the inter-ring data buffer (IRDB) holds packets to be
transmitted to nearby DNs, SDNs and RMNs. For intra-ring data communications,
a RMN will send packets when it receives the token, and the IADB is not empty.
The transmission time of the THN is controlled by the token maximum hold time
TMTH . Once the TMTH is reached, the THN will pass the token to its successor. To
ensure token delivery, THN will retransmit the token if it does not receive an ac-
knowledgement (ACK) from its successor and the retransmission timer has expired.
If the maximum number of retransmissions is reached with no ACK from the suc-
cessor, the THN will report to the RFN, and the RFN will delete the successor from
the ring and update the ring as well as informing other RMNs. For the inter-ring
data communications, data packets are transmitted with CSMA CA mechanism.
MCTRP shows that it can deliver emergency messages in fast way and enhance
the network throughput. It also provides fairness among vehicles, in term of channel
sharing, and token holding time adjustment.
2.7 SUMMARY
In this chapter, I presented a background about VANET. I explained the char-
acteristics of VANETs, as well as the types of messages in VANETs. I also gave a
background about the IEEE standards for MAC protocols for VANETs, including

31
the IEEE 1609 WAVE standards, the IEEE 1609.4 standards, and the IEEE 802.11P
standards. After that, I described the challenges and issues of WAVE MAC. For clus-
ters, I explained the main concept of clustering and the cluster formation, including
some clustering algorithms. Also in this chapter, I explained the main types of MAC
protocols for VANET, including some proposed protocols for each type.

32
CHAPTER 3
MULTI-CHANNEL CLUSTER-BASED TDMA MAC
PROTOCOL FOR INTRA-CLUSTER
COMMUNICATIONS (TC-MAC)
In this chapter I will describe our TDMA MAC protocol, TC-MAC. I will start
by describing the TDMA slot assignment, and then I will describe the intra-cluster
communications. In this protocol, unlike WAVE, all vehicles are able to tune to the
CCH or the SCHs if needed during the time cycle. It is designed to allow vehicles to
send and receive non-safety messages without any impact on the reliability of sending
and receiving safety messages even if the traffic density is high.
3.1 TDMA SLOT ASSIGNMENT
The presentation of my protocol involves several aspects of intra- and inter-cluster
communication. In turn, each of these communication regimens is partitioned into
cases depending on whether or not the cluster is single-hop. The clustering scheme
I am using is clusterhead (CH ) based, where the consensus is dictated by the CH.
I also assume that all vehicles are equipped with GPS to ensure that vehicles have
synchronized clocks. This protocol is based on the multi-channel DSRC layout, with
1 CCH and 6 SCHs.
To explain my technique, I assume an N -vehicle cluster. The number of vehicles
in the cluster must be less or equal to Nmax; where Nmax is the maximum number of
vehicles in the cluster. The transmission time is partitioned into consecutive, non-
overlapping logical TDMA frames. The length of the TDMA frame in TC-MAC is
equal to 100 msec. In this case, we guarantee that every vehicle in the cluster sends
one update/safety message every 100 msec to meet the safety message requirements.
We assume the existence of k slotted SCHs numbered from 0 through k -11. In each
SCH, the logical TDMA frames are aligned, i.e. begin and end at the same time.
1In practice we use k=6 to match DSRC, but we will describe it generally.

33
Each logical frame contains S number of slots, where S = ⌊Nmax
k⌋ + 1 slots. The
slots are numbered from 0 through ⌊Nmax
k⌋. All slots are the same size, and the slot
size τ is fixed, based on the data rate and the maximum packet size.
We also assume one CCH, channel k, is used by the vehicles and CH for dissem-
inating status and control messages as is done with WAVE. As with the SCHs, the
TDMA frame on channel k is divided into slots of size τ . Each time slot on the CCH
is divided into k mini-slots used to disseminate status information, such as periodic
beacon updates used in safety applications.
By virtue of synchronization, the vehicles know the frame and slot boundaries.
The number of vehicles N may change dynamically, and the CH is responsible for
updating N and for informing all vehicles in the cluster of the new value of N.
Each vehicle in the cluster will receive a local ID. This local ID is a number from
0 to N. The CH will always have ID 1, and ID 0 is reserved for a virtual vehicle (to be
described later). We do not expect all N vehicles in the cluster to be communicating,
or active, simultaneously. The CH keeps a list of all the currently-active vehicles and
disseminates this list to all the members of the cluster using one of the mechanisms
discussed below.
In each logical frame, vehicle j, (0 ≤ j ≤ Nmax − 1), owns:
• Channel (j mod k) during time slot ⌊ jk⌋; we also say that vehicle j owns the
ordered pair (j mod k, ⌊ jk⌋)
• The mini-slot (j mod k) of slot (⌊ jk⌋−1), on channel k, as illustrated in Figure
18
The basic idea is that in each logical frame, while idle, vehicle j listens to channel
j mod k in slot ⌊ jk⌋ and sets the corresponding byte in the CCH in order for other
vehicles to be aware of transmitting to vehicle j during j ’s time slot on the SCH.
Notice that the Integer Division Theorem guarantees that if i ̸= j then either:
• ⌊ ik⌋ ̸= ⌊ j
k⌋ or
• i mod k ̸= j mod k, or both.
This confirms that no two vehicles own the same ordered pair. For an illustration, let
N=61 and k=6. Assume we have the network settings in Table 4, and the number

34
k
0 1 2 1−
k
j
k
Nmax
0 1 2 k-1j
Fig. 18. j ’s mini-slots on channel k ; vehicle j owns a mini-slot on the CCH in theslot preceding its own slot on the SCH
TABLE 4. Network settings
Parameters Values
Max Safety Packet Size 200 bytes
Max Non-Safety Packet Size 1200 bytes
Data Rate 6 Mbps
Mini Slot Size 0.26 msec
SCH Slot Size 1.6 msec
TDMA Frame Size 100 msec
of TDMA slots on the SCHs will be 65; Nmax = 389. As shown in Figure 19, vehicle
with local ID 39 owns channel (39 mod 6)=3 during slot ⌊396⌋=6, as well as 4-th
mini-slot on the control channel in slot 6-1=5. We note that for any given N, there
are Nmax −N unused slots in the frame.

35
Fig.19.Logical
fram
esin
TC-M
AC
forN=61
andk=6

36
For communication between two vehicles, the vehicles will use their time slots on
the SCHs to exchange messages. Let’s assume we have two vehicles, A with local ID
4 and B with local ID 15. If vehicle A and vehicle B are on different slot numbers
on the SCHs and want to exchange messages, they can use their on time slots own
the SCHs to complete the process, Figure 20.
For communication with RSUs, if the RSU is communicating with one vehicle,
the RSU will be treated as if it is a vehicle. If the RSU is trying to communicate with
more than one vehicle, the RSU and the other vehicles will use their time slots to
communicate. The communications of the RSUs are considered as any other vehicle
in the cluster.

37
Fig.20.Exam
ple
show
stheslotsthat
vehicle
AwithlocalID
4an
dvehicle
BwithlocalID
15canuse
tocommunicateon
the
SCHs

38
3.2 INTRA-CLUSTER COMMUNICATION
For intra-cluster communication, we look at single-hop and multi-hop clusters.
Our goal is to design lightweight communication protocols that avoid, to the largest
extent possible, the involvement of the CH in setting up connections between vehicles.
As a single-hop cluster, all vehicles in the cluster can communicate directly; while
vehicles in the multi-hop cluster need to rely on other vehicle(s) in the cluster to
communicate with all vehicles. Consequently, the vehicles do not need to discover
their neighbors.
Each vehicle uses its own mini-slot to disseminate status information. The first
byte of the mini-slot can be used to encode 28 = 128 different situations; a few of
them are listed below:
• 0 indicates that the vehicle is not communicating on its own slot on the SCH
at the moment.
• 1 indicates that the vehicle is involved in communicating with some other vehi-
cle in the cluster on the SCH ; the binary encoding of the ID of the interlocutor
follows in the second byte.
• 2 indicates that the vehicle is involved in communicating with a multicast group
in the cluster; the binary encodings of the IDs of the members of the multicast
group follow in the next bytes.
• 3 indicates that the vehicle is involved in communicating with a vehicle or RSU
outside the cluster.
• 4 indicates that the CH is leaving the cluster and a new CH is picked by the
current CH ; the binary encoding of the old ID of the new CH follows in the
second bytes.
• 5 indicates that the vehicle is leaving the cluster.
• 6 indicates that the CH election process need to be performed.
• 7 indicates that the vehicle wants to join the cluster, “Handshake”. This will
be sent by the new comer vehicle to the any cluster member in the targeted
cluster.

39
• 8 is the confirmation of the “handshake” message that sent by the new comer.
• 9 indicates that the vehicle will transmit during its upcoming slots; the binary
encodings of the number of frames that the vehicle will be using on its own slot
on the SCH.
• 10 indicates that the vehicle will use its upcoming slot to transmit.
Certain messages need to be transmitted inside the cluster. These messages are
safety, governance, and non-safety messages. Also, the messages could be broadcasted
or unicasted. We explain our scheme below.
3.2.1 DISSEMINATING INTRA-CLUSTER SAFETY/GOVERNANCE
MESSAGES
The CH is responsible for disseminating safety and governance messages. When
a safety message needs to be broadcast to the cluster, the CH will use its mini-slot
on the CCH to broadcast the message. Also, the CH will repeat the same safety
message in any available mini-slot on the CCH of the same TDMA frame. The
reason for repeating the same safety messages is to achieve the effect of broadcasting
to the entire cluster. The CH may decide to disseminate safety messages to a subset
of the vehicles, in which case it will also broadcast an N -bit vector, indicating which
vehicles are targeted by the message; if all bits are set, the message is a cluster-wide
broadcast.
In addition to safety messages, the previously-described mechanism is employed
for cluster governance messages including:
• The updated value of N and multicast group setup requests.
• Channels and slot times during which the CH has “office hours” and will listen
to individual requests.
In the case of multi-hop cluster, the CH will disseminate safety/governance mes-
sages to nearby cluster members and will pick a vehicle to be a relay node to other
cluster members that are not in the range of the CH. In Figure 21, we have a three-
hop cluster with a transmission range of 300 m. When the CH wants to disseminate
safety/governance messages, vehicles up to 300 m behind and 300 m ahead of the
CH will receive the messages directly. However, the vehicles that are located more

40
L
<=900m
Traffic
direction
CH
<=300m<=300m
RP
<=300m
Fig. 21. Disseminating of safety messages by the CH in a multi-hop cluster. TheCH sends the safety messages to vehicles in group L and group P. The CH will picka vehicle from group P to be a relay node to vehicles in group R
than 300 m away from the CH in group R will not be able to receive the messages.
In this case, the CH will find a vehicle that is in range of the CH and other vehicles
in R to be a relay node. This can be done by the CH requesting one of the farthest
vehicles ahead to disseminate the safety message to other vehicles in range. As show
in Figure 21, any vehicle in group P can be a relay node to vehicles in group R.
3.2.2 INTRA-CLUSTER UNICAST COMMUNICATION
Unicast (a.k.a. point-to-point) communications in a single-hop cluster are set up
without CH intervention. Suppose vehicle i wishes to talk with vehicle j ; setting up
a connection between them is done as follows:
• By tuning in to vehicle j ’ s own mini-slot, vehicle i determines whether or not
vehicle j is available.
• If so, vehicle i transmits a handshake packet on channel j mod k during time
slot ⌊ jk⌋.
Assuming no collision (i.e. some other vehicle may also want to talk to j ), j will
pick up the handshake packet and will negotiate with vehicle i the parameters of the
data exchange by replying on channel i mod k during time slot ⌊ ik⌋; again, assuming
no collision, the connection between vehicles i and j has been set up. Now, both
vehicles set up the first byte of their mini-slots to indicate the status change. Once
the connection has been set up, the two vehicles can communicate either in i ’s slot,

41
L
<600m
Traffic
direction
A
B
CH
P3
P1
P2
<=300m
<=300m
P R
Fig. 22. Unicast of non-safety messages in a two-hop cluster, where vehicle A fromgroup L is trying to send a non-safety message to vehicle B from group R. VehicleA needs to find a vehicle in group P to be a relay node to vehicle B
j ’s slot, or both, if needed. If vehicles i and j need more than the basic amount of
bandwidth, they may seek permission from the CH to use one or more extra unused
time slots.
In the case of multi-hop clusters, unicast communications are set-up through
negotiation with some cluster members to find a path. In this section, we will describe
two multi-hop cases. The first case is a two-hop cluster. From Figure 22, we have a
two-hop cluster where each vehicle in group L can communicate directly with other
vehicles in group L, as well as vehicles in group P. Also, vehicles in group R can
communicate directly with other vehicles in group R and group P. If vehicle A from
group L wants to send a non-safety message to vehicle B from group R, vehicle A
will try to find a vehicle from group P to be a proxy node for the communication
between A and B. Finding vehicle in P is done by vehicle A sending a request on the
CCH during A’s mini-slots seeking a vehicle in the range of B. If there is a vehicle
in P willing to be a relay node between A and B, vehicle P will reply to A during
A’s time slot on the SCH. Once the P vehicle is determined, the path is defined and
vehicles can start transmission. The transmission will be done during the time slots
for the three vehicles in the path, A, P and B. Figure 23 shows the process of setting
up an unicast communications in a two-hop cluster.
Our goal is to complete the transmission from A to B in one TDMA frame. To
achieve this goal, the use of the time slots of the vehicles needs to be in a certain
order. Since it is only a two-hop cluster, we need only two TDMA time slots to

42
transmit from A to B. However, the path from A to B has three vehicles, which
means we have three different TDMA time slots. This can be done as follows:
• A will use the earliest time slot to send to P. It could be A’s, P’s or B’s.
• P will use the earliest time slot of the remaining two time slots to send to B.
• If all time slots are at the same time but on different SCHs, A will use its own
to send to P and then P will use one of the unused time slots to send to B.
In the case of a three-hop cluster unicast communications, the path from the
sender vehicle to the receiver vehicle may involve up to four vehicles. From Figure
24, when vehicle A wants to send a message to vehicle B, two other vehicles need to
be involved to complete the transmission. This can be done as follows:
• Vehicle A needs to find a vehicle in P1 that is willing to participate in this
transmission. This process is done in the same fashion as finding P in the
two-hop cluster above.
• After finding a vehicle in P1, this vehicle looks for a vehicle in P2 that is
willing to participate in this transmission. Also, this is done as if it is a unicast
of two-hop cluster.
• Once we have two vehicles from P1 and P2, A will be able to communicate
with B.
When the path is defined, all vehicles in the path know the TDMA time slots of each
other using the local IDs of the vehicles in the path.
To achieve the transmission from vehicle A to vehicle B in one TDMA frame,
the order of using the TDMA time slots for the four vehicles needs to certain way.
Since we have four TDMA time slots and we need only three of them to complete
the transmission, the selection of the TDMA time slots can be done as follow:
• A will use the earliest time slot to send to P1, it could be A’s, P1’s, P2’s or
B’s.
• P1 will use the earliest time slot of the remaining three time slots to send P2.
• P2 will use the earliest time slot of the remaining two time slots to send B.

43
Packet to send
Target vehicle
in range
Start TC-MAC-
Unicast
Select a vehicle
P1 to be a relay
node
Path defined
Select slots order
Send packet using
assigned TDMA
slots
End TC-MAC-
Unicast
Yes
No
Target vehicle
in range
Yes
No
Select a vehicle
P2 to be a relay
node
Fig. 23. Flowchart of the multi-hop intra-cluster unicast communications

44
L
<=900m
Traffic
direction
A
B
CH
<=300m<=300m
P1 RP2
<=300m
Fig. 24. Unicast of non-safety messages in a three-hop cluster
• If all time slots are at the same time but on different SCHs, unused slots will be
used. If the unused slots can not make the transmission in one TDMA frame,
the CH needs to get involved and change one of the local IDs of the vehicle in
the transmission path to make transmission complete in one TDMA frame.
3.2.3 INTRA-CLUSTER MULTICAST COMMUNICATION
Multicast (a.k.a. point-to-multipoint) communications may be set up with or
without CH intervention. Suppose vehicle j wishes to establish a multicast group
involving vehicles i1, i2, ..., ip. If the multicast group is small, vehicle j will attempt to
send a handshake message to each of the remaining vehicles in the multicast group.
Once the group has been set up, vehicle j will transmit on channel j mod k during
time slot time ⌊ jk⌋ and all the other vehicles will listen to the channel. If the size
of the multicast group is large, vehicle j will send the CH a multicast group request
consisting of its own ID along with an N -bit vector with the bits corresponding
to the multicast group set. Once received by the CH, this multicast group set-up
request will be disseminated by the CH in the next available logical frame, by all the
modalities discussed above. Once the multicast group has been set up, vehicle j will
transmit to the group on channel j mod k during slot ⌊ jk⌋. For a multi-hop cluster,
if the vehicles are not in the range of vehicle j, vehicle j will find a vehicle in P1 or
P1 and P2 to act as a proxy(s) to the other vehicles in multicast group.
3.3 IMPACT OF GUARD INTERVAL

45
A GI is used at the beginning of each channel interval in WAVE to enable the
radio devices to complete switching and account for any synchronization inaccuracy.
The channel switching is measured to be 40-80 microseconds [44], while the GPS
timing inaccuracy is in nanoseconds [2]. So, using GIs should have an impact on
either the number of slots or the slot size in a TC-MAC frame. If we need to keep
the number of slots in TC-MAC frame as it was before adding the GI, the slot size
will be smaller. To calculate the new slot size, I consider only the switching time,
since the GPS timing inaccuracy is in nanoseconds. Also, the GIs will be added to
each slot on the SCHs. On the CCH, the GI will be added at the beginning of the
slot, and will serve for all six mini-slots. If the switching time is 80 microseconds,
the new SCH slot size will be as follows:
1.6msec− 80µsec = 1.520msec
The size of non-safety message using GI will be:
1.520msec =1000msec
6, 000, 000b×Xmsec
X = 91, 200b = 1, 140B
For the mini-slot on CCH, the size will be as follow:
The slot size on SCHs
Number of mini-slots in the slot
1.520msec
6
0.253msec
The size of safety/update message using GI will be:
0.253msec =1000msec
6, 000, 000b×Xmsec
X = 1, 520b = 190B
3.4 SUMMARY
In this chapter, I presented a cluster-based TDMA scheduling protocol for MAC
for VANETs (TC-MAC), in which the collision-free intra-cluster communications
were organized by the CH using a TDMA scheme. We also explained a light weight
slot reservation algorithm. Our work is based on guaranteeing that vehicles receive

46
non-safety messages without affecting safety messages. We also changed the concept
of having two intervals by having vehicles listening to the control channel and the
service channels during the same time cycle. This scheme should be easy and fast to
maintain. The evaluation of TC-MAC will be covered in Chapter 6.

47
CHAPTER 4
CLUSTERING AND CLUSTER MAINTENANCE
In this chapter, I will present two different protocols. First, I will describe in
details the clustering formation protocol. This protocol is based on electing the
clusterhead (CH) among the vehicles that present the majority of the traffic flow.
Second, I will describe the cluster maintenance protocol using TC-MAC. This chapter
aims to describe the design architecture as well as to provide the details of each
architectural component.
4.1 CLUSTERHEAD ELECTION AND CLUSTER FORMATION
In this section, I will present a lane-based clustering algorithm designed to pro-
vide stability in cluster lifetime for VANETs. Stable clustering methods reduce the
overhead of re-clustering and lead to an efficient hierarchical network topology. Dur-
ing the creation of VANET clusters, cluster members select one member to be the
CH. Fewer CH changes result in a more stable cluster. To achieve this goal, cluster
members must select a member that has the potential to be a CH longer than other
cluster members. My method aims to select a CH based on the lane where most of
the traffic will flow.
The proposed protocol is based on the assumption that each vehicle knows its
exact lane on the road via a lane detection system and an in-depth digital street
map that includes lane information, such as NAVTEQs NAVSTREETS [45]. A lane
detection system is an important element of many applications in VANETs, such the
Extended Emergency Brake Light system [46].
The Global Positioning System (GPS) is the primary system that is used for
vehicle localization. However, GPS has weaknesses when it comes to updating the
positioning data and when there is no signal. GPS has a 5 m error which is larger
than the distance between lanes. There has been much research on detecting and
localizing lanes on roads. Several algorithms have been proposed using different
techniques. Some methods use GPS combined with a wheel odometer [47], which
provides relative localization as it detects changes in pose relative to the previous

48
Traffic direction
Fig. 25. Showing how the traffic flow is dividing vehicles ahead in different directions.The rightmost lane present an exit on the highway
pose. The advantage of the wheel odometer is that it is high resolution and simple
to use. It can typically detect movements on the order of tenths of millimeters.
Other algorithms do not use GPS and instead use techniques such as vision [48],
[49], [50], LIDAR (Light Detection and Ranging) [51], and a beacon network using
infrastructure to triangulate vehicle position [52].
In my approach, I considered highway scenarios with exits in the design of the
proposed protocol. The CH will be selected based on the flow of the majority of
traffic. For example, if the highway has four lanes and three of them are going
straight and one of them is for the exit on the highway, the CH should be selected
from the lanes that are going straight. This research applies the knowledge of each
vehicle’s lane and the flow direction of each lane (Figure 25).
In highway scenarios, traffic flow may split at each exit. There are three main
traffic flows in a highway: Left Exit (LE ), Right Exit (RE ), and No Exit (NE ). The
highway may have all three types of traffic flows or only some of them at a certain
point on the highway. LE is applied to the leftmost lane(s) if it splits the traffic to
the left, RE is applied to the rightmost lane(s) if it splits the traffic to right, while
NE is applied to the lane(s) where the traffic goes straight.
This proposal follows the same general idea as the Utility Function [28], but
employs a different set of rules. We considered the effect of traffic flow, using lane
information, on the process of CH election. Each vehicle computes and broadcasts
its CH Level (CHL) along with its update message on the CCH. The vehicle with
the highest CHL will be elected as the CH. If the elected CH is a member of another

49
cluster, the vehicles will choose the second highest, etc. CHL is defined as
CHLi = NCL(t)i + ADLi + AV Li (1)
where NCL is the network connectivity level, ADL is average distance level, and
AVL is average velocity level. The computation of each of these metrics is described
below.
4.1.1 LANE WEIGHT
The key to our approach is to consider the lane a vehicle belongs to. We apply to
each metric a lane weight (LW ) for each traffic flow (LE, RE and NE ). The weight
is determined based on the total number of lanes on the highway (TNL) and the
number of lanes for each traffic flow (NLTF ). If the road has three different traffic
flows, we will have three different LWs. LW is defined as
LWk =1
TNL×NLTFk (2)
where k is the lane number. For example, if we have a road of four lanes where one
lane is LE, one lane is RE, and two lanes are NE, then the LW for each traffic flow
will be LWLE = LWRE = 0.25 and LWNE = 0.50. If a vehicle is on a lane with traffic
flow LE, then it will use LWLE. In the equations that follow, LWTF represents the
LW for the traffic flow of the vehicle performing the computation.
4.1.2 NETWORK CONNECTIVITY LEVEL
To compute the Network Connectivity Level (NCL), we need to calculate the
overall NCL and the NCL for each traffic flow. The overall NCL, α, is the maximum
number of vehicles that are directly connected to vehicle i. This is defined as
αi(t) =∑i
A(i, j, t) (3)
where j is a potential neighbouring vehicle. A(I, j, t) is equal to 1 if a connection
between i and j exists at time t, and is equal to 0 otherwise. At this point, we have
calculated the connectivity level between a vehicle and all other vehicles on the road.
Now, we calculate the connectivity level for a vehicle and the vehicles in the traffic
flow it belongs to. The traffic flow connectivity level β for vehicle i is defined as
βi(t) =∑JTF
A(i, JTF , t) (4)

50
where JTF is a vehicle in the same traffic flow as vehicle i.
After calculating both levels of network connectivity, we define the total connec-
tivity level for vehicle i on a lane belonging to traffic flow TF as
NCLi(t) = βi(t) + αi(t)× LWTF (5)
where LWTF is the lane weight for the lane that vehicle i occupies.
4.1.3 AVERAGE DISTANCE LEVEL
To calculate the Average Distance Level (ADL), we calculate the overall average
absolute distance, δ, between vehicles that are directly connected to vehicle i. This
is defined as
δi =
∑j
√(xj − xi)2 + (yj − yi)2
NV(6)
where j is any vehicle connected to i, and NV is the total number of vehicles that
are directly connected to i in any lane.
Next, we calculate the average absolute distance, χi, between vehicle i and other
vehicles in the same traffic flow, TF. This is defined as
χi =
∑jTF
√(xj − xi)2 + (yj − yi)2
NVTF
(7)
where j is any vehicle in the same traffic flow and connected directly to i, and NVTF
is the total number of vehicles that are directly connected to i and in the same traffic
flow.
The ADL for vehicle i in traffic flow TF is defined as
ADLi = (χi + δi)−1 × LWTF (8)
4.1.4 AVERAGE VELOCITY LEVEL
We calculated the overall Average Velocity Level (AVL) as the difference between
the average velocities of all vehicles in range and the candidate CH velocity. Then,
we add this to the product of LW and the average velocity for the traffic flow. The
overall AVL, σi, for vehicle i is defined as

51
σi =∑j
|V eli − V elj| (9)
where j is a potential neighbouring vehicle, and V eli is the velocity of vehicle i.
Now, we calculate the AVL for vehicle i and the traffic flow it belongs to. This
is defined as
ρi =∑jTF
|V eli − V elj| (10)
where jTF is a vehicle in the same traffic flow as vehicle i.
The AVL for vehicle i in traffic flow TF is defined as
AV Li = (ρi + σi)−1 × LWTF (11)
After calculating the values above, the CHL is determined for each vehicles in-
dividually, and will be broadcasted in the update message of each vehicle. Every
vehicles is a candidate to be a CH, but the vehicles with highest CHL and not a
member of another cluster will be elected as a CH. When the CH is elected, it will
pick the cluster local ID 1. Other vehicles in the cluster will be assigned to local IDs
by the CH. Once the CH has assigned all vehicles with local IDs, it will broadcast
a table of the new assignment to all vehicles in the cluster on the CCH. This table
will contain all the cluster members and their local IDs. Also, this table will be
broadcasted by the CH every time the cluster topology changes.
If there are only two vehicles in the highway, the CH will be selected as the vehicle
of the lowest ID. If more vehicles are joining the cluster, my CH election algorithm
will be performed.
4.2 CLUSTER MAINTENANCE
Due to the movement of vehicles, the cluster will not stay the same for long time.
The behavior of many vehicles may change the topology of the cluster; for example:
• A clusterhead leaving the cluster
• A new vehicle joining the cluster
• A cluster member leaving the cluster

52
• Two clusters get in range of each other
• A multi-hop cluster shrinks to a one-hop cluster
All these changes in the cluster topology will be addressed.
4.2.1 CLUSTERHEAD LEAVING THE CLUSTER
When a CH is elected using our CH election algorithm, the CH will be locally
assigned to ID 1, as the local ID TC-MAC protocol. If the CH predict changes in its
mobility behavior that might lead to being an unstable CH, it will prepare for giving
up its responsibility as a CH. This process can be done by choosing another cluster
member that is willing to serve as a stable CH for the cluster. From Figure 26, we
have two-hop cluster where the CH is assigned to a local ID of 1. In this case, the
CH is ready to resign. Before this happens, the CH will pick one of the vehicles in
area C to be a CH. The reason for that is to have a two-hop cluster even after the
current CH leaves. The process will be done by switching the local ID between the
current CH, ID 1, and the new CH. If there are no vehicles in C besides the CH, a
new three-hop cluster will be formed.
From Figure 26, C includes CH and vehicles x and y. Vehicle with ID z is in
between x and y but not part of C. We want to prove that z is part of C and can
be a CH. Let us assume the following:
• V is a set of vehicles in an area of 600m or less (assuming the communication
range is 300m).
• CH is a vehicle that can communicate directly with all vehicles in V.
• C is set of vehicles that can do the job of CH.
• x is the farthest vehicle of C behind CH.
• y is the farthest vehicle of C ahead of CH.
• L is a set of vehicles that are behind CH and not part of C.
• R is a set of vehicles that are ahead of the CH and not part of C.
Given:
∀c ∈ C Adjust to all other vehicles in V

53
L
<600m
Traffic
direction
1
y
x
z
<=300m<=300m
C RC start C end
Fig. 26. CH, ID 1, is about to resign. So, it will choose vehicle x, y, or z to be a newCH
R.T.P:
Any vehicle z between x and y is part of C and can be a CH.
Given:
1. (z − l) 6 300m
where l ∈ L
2. (z − r) 6 300m
where r ∈ R
Proof 1:
∵ x ∈ C (12)
∵ x ∈ [Cstart, Cend] (13)
where Cstart is the start point of C and Cend is the end point of C.
∵ |C −R| ≤ 300m (14)
Assume we have vehicle r that belongs to R where:
|C − r| ≤ 300m
From 12, we can replace C with x :
∴ |x− r| ≤ 300m (15)

54
∵ |x− Cend| ≥ |z − Cend| (16)
∴ |z − r| ≤ 300m (17)
Proof 2:
∵ y ∈ C (18)
∵ y ∈ [Cstart, Cend] (19)
where Cstart is the start point of C and Cend is the end point of C.
|C − l| ≤ 300m
From 18, we can replace C with y :
∴ |y − l| ≤ 300m (20)
∵ |y − Cstart| ≥ |z − Cstart| (21)
∴ |z − l| ≤ 300m (22)
From 17 and 22, z can be a CH.
If there are no vehicles in C besides the CH, two single-hop clusters will be
formed. This process is done by selecting a vehicle from L and a vehicle from R to
act as CHs for the new clusters, cluster L and cluster R. The selection of these two
vehicles is done by the current CH informing vehicles in L and R that they will be
two single-hop clusters. And then, the CH election algorithm will be performed in
both new clusters, L and R, by cluster members sending their own Clusterhead Level
CHL value using their own mini-slot from the old cluster on the CCH. The old CH
will try to join one of the new formed cluster.
4.2.2 A NEW VEHICLE JOINING THE CLUSTER
Now, I will describe the process of accepting a new vehicle in the cluster. Impor-
tantly, this operation is preempted by the broadcast of update messages. I describe
this process for a single-hop cluster and two-hop cluster.
For the single-hop cluster, when a new vehicle in the same direction on the high-
way wishes to join the cluster, it will attempt to get the CH’s attention by transmit-
ting in the mini-slot of virtual vehicle 0. Assuming that it was successful in getting
the CH’s attention, the CH will broadcast a “New Vehicle” message as discussed
above and tentatively assign the newcomer ID 0. The new-comer will then transmit

55
a “Handshake” message in both the CH’s slot of the current frame as well as the
virtual vehicle’s slot in the next frame; this has the effect of broadcasting to the en-
tire cluster. To confirm that the single-hop structure of the cluster is preserved, each
vehicle in the cluster will have to confirm receipt of the “Handshake”. To achieve
this, each vehicle sets the first byte of its mini-slot to 8 and the CH will read all the
mini-slots. If all the vehicles have confirmed receipt of the “Handshake” message,
the new vehicle is accepted in the cluster and will be allocated the lowest available
ID number. If necessary, N will be adjusted and the CH will broadcast the updated
information to the other vehicles in the cluster. If the cluster size has reached the
maximum number of vehicles, the new vehicle will be informed that it cannot join
the cluster and it will be treated as if it is from another cluster. Figure 27 shows
when vehicle i is trying to join the cluster.
For the two-hop cluster, assuming that the new vehicle is not in range of the CH
but in range of other vehicles in the cluster, when a new vehicle in the same direction
on the highway wishes to join the cluster, it will attempt to get the attention of any
vehicle in the cluster by transmitting in the mini-slot of virtual vehicle 0. Assuming
that it was successful in getting the attention of one of the cluster members, the
cluster member will inform the CH of the newcomer using the cluster member’s
mini-slot. When the CH receives a newcomer notification from a cluster member,
the CH will start to look for an available local ID to assign to the newcomer and
then send it back to the cluster member that discovered the newcomer. Once the
cluster member receives the available ID from the CH, it will inform the newcomer
in the same way as in the single-hop cluster. All the communications between the
cluster member and the CH for assigning the local ID to the newcomer are done
using their own mini-slots on the CCH. Figure 28 shows when vehicle i is trying to
join the cluster by communicating with cluster member j on the mini-slot 0.
4.2.3 A CLUSTER MEMBER LEAVING THE CLUSTER
When a vehicle i predicts mobility changes that might lead it to leave the cluster,
it will broadcast that to the entire cluster using its own mini-slot. If vehicle i fails
to do so, the CH will assume that vehicle i is gone after a certain period of time of
not hearing from vehicle i. Once the CH defines that vehicle i is no longer a cluster
member, the CH will place the local ID of i in the list of the available IDs. If a new
vehicle wants to join the cluster, the CH can assign the new vehicle to one of the

56
2
i
4
300m
Traffic
direction
Traffic
direction
CH
Mini-slot 0
3
Fig. 27. A new vehicle i is trying to join a single-hop cluster by communicating withthe cluster’s CH using mini-slot 0. Notice that vehicle i is traveling on the samedirection as the cluster
2
i
4
>300m
Traffic
direction
Traffic
direction
CH
Mini-slot 0
3
5j
J and CH’s
Mini-slot
Fig. 28. A new vehicle i is trying to join a two-hop cluster by communicating withthe cluster member j using mini-slot 0. Notice that vehicle i is traveling on the samedirection as the cluster

57
CH-A2
3
Cluster A Cluster B
3
CH-B2
300m
300m
Traffic
direction
Traffic
direction
65
mph
75
mph300m
Fig. 29. Two single hop clusters in range of each other, before merging
available local IDs. Also, the CH will send an update table of the cluster members
and their local IDs.
4.2.4 MERGING TWO CLUSTERS
In my scheme, the cluster is considered to be a single-hop or two-hop. So, because
of the dynamics of vehicles on the road, two single-hop clusters may come into range
of each other to form a two-hop cluster.
When two single-hop clusters are in range of each other and the vehicles are
traveling in the same direction, these two clusters can merge creating one single-hop
or multi-hop cluster, as shown in Figure 29. The cluster members that are located at
the head and tail of each cluster will be the vehicles that get involved in the merging
process. When these vehicles detect the present of the other cluster, they will start
the merging process. The merging process will be performed by vehicles advertising
themselves to other vehicles in the different clusters by sending an advertisement
messages that includes their IDs and their clusters size during the mini-slot of the
virtual vehicle, ID 0. If the total number of vehicles in both clusters is less than or
equal to the maximum number of the cluster size in TC-MAC, the merging process
will continue. This procedure detecting outsiders will be performed periodically, e.g.
1 second. Once the messages are exchanged between the two vehicles of the two
different clusters, each one of them will try to communicate with the other based on
each one’s mini-slot of the original cluster. During this communication, both vehicles
will inform their CHs about the merging process.
The vehicle in the larger cluster will be the CH. Then, the old CH in the large

58
CH-A2
3
Cluster A Cluster B
3
CH-B 2
300m
300m
Traffic
direction
Traffic
direction
65
mph
75
mph300m
Fig. 30. Closest vehicles from each cluster swapping IDs with their CHs during theprocess of merging
cluster will resign by swapping IDs, ID 1, with the new CH. The old CH will be
pushed into a stack for future needs, as shown in Figure 30. The sender vehicle in
the other cluster will swap its ID with the CH of its own cluster, and the old CH
will be pushed into a stack for future needs. The reason for pushing the old CHs in
a stack is that they will be valuable if the two single-hop clusters split again. Once
the whole large cluster is formed, the vehicles of the old large single-hop cluster will
have the same IDs, while the vehicles of the old small single-hop cluster will receive
new IDs. The new IDs will be the old IDs plus the size of the old larger one-hop
cluster. So, the low IDs will be in the old large one-hop cluster and the high IDs will
be in old the smaller one-hop cluster, as shown in Figure 31. If the clusters are of
the same size, the CH of the approaching cluster will be the CH of the new cluster.
If the new large cluster seemed to be stable for a long time, not splitting into the
two old clusters, every vehicle will calculate the CHL value and send it along with
its update message to elect a new CH.
4.2.5 A MULTI-HOP CLUSTER SHRINKING TO A ONE-HOP CLUS-
TER
When vehicles in a multi-hop cluster move closer to each other, there is a chance
of forming a single-hop cluster (Figure 31). In this case, vehicles will keep the same
IDs as the CH remains a CH. Also, vehicles in the cluster will be able to communicate
directly with other vehicles in the cluster, as shown in Figure 32.

59
2
6
3
4
300m
Traffic
direction
Traffic
direction
65
mph
75
mphCH
300m
<300m
5
Fig. 31. The new CH for the new cluster that resulted of the merge
2
6
3
4
300m
Traffic
direction
Traffic
direction
65
mph
75
mphCH
5
Fig. 32. One single-hop cluster, after shrinking of a multi-hop cluster
4.3 SUMMARY
I presented an algorithm for CH election based on the traffic flow of vehicles
on the highway. With the availability of lane detection, lane direction and map
matching, we were able to select the most stable clusterhead. I also presented a
cluster maintenance algorithm. With the availability of local IDs, we were able to
have less overhead when the topology of the cluster changes. We tested our algorithm
using simulation. An evaluation of these technique will be presented in Chapter 6.

60
CHAPTER 5
CDMA/TC-MAC HYBRID PROTOCOL FOR
INTER-CLUSTER COMMUNICATIONS
In this chapter I present a CDMA/TC-MAC hybrid protocol for inter-cluster
communications. In this protocol, a Code Division Multiple access (CDMA) scheme
is implemented on top of TC-MAC to enable vehicles to communicate with vehicles
in different clusters and with RSUs. In addition, the hidden and exposed terminal
problems are addressed by the proposed protocol.
5.1 CDMA/TC-MAC ARCHITECTURE
As explained in Chapter 3, the TC-MAC protocol is able to manage the transmis-
sion of safety/update and non-safety messages inside one cluster. However, VANETs
require broadcasting of safety/update messages to nearby vehicles from different clus-
ters. Besides that, VANETs need to be able to transmit non-safety messages to any
other vehicles on the road, if needed. TC-MAC, as it is, is not able to communicate
with other vehicles from different clusters. To solve this issue, TC-MAC needs to be
modified to overcome the inter-cluster communications challenge. The modification
I made is using CDMA combined with TC-MAC for inter-cluster communications,
resulting in CDMA/TC-MAC. This addition does not have any impact on the per-
formance of TC-MAC, in terms of intra-cluster communication.
The CDMA protocol type used in CDMA/TC-MAC is a transmitter-based proto-
col. In this type of CDMA protocol, a transmission code is assigned to each cluster to
be used for intra-cluster communications. With the use of the CDMA assigned code
and TC-MAC inside the cluster, intra-cluster collisions should not happen. Also,
this will support broadcast inside the cluster without the risk of the interference
with other vehicles from other clusters.
In order for CDMA/TC-MAC to work, it needs two different protocols. These
protocols are the Code Assignment protocol and the Recovery protocol. I will explain
these two protocols in the following subsections.

61
5.1.1 CODE ASSIGNMENT PROTOCOL
The Code Assignment protocol is used to assign a CDMA code to the cluster.
This task is done by the CH. There are 8 different CDMA codes in CDMA/TC-MAC.
These codes are used based on the highway and the cluster’s direction. CDMA/TC-
MAC considers vehicles in opposite directions, as well as on opposite highways. With
the information provided by GPS, vehicles can determine their direction; if a vehicle
is moving from west to east (or north to south), it is in the right direction (R)
and opposite vehicles are in the left direction (L). For the direction of the highway,
CDMA/TC-MAC uses the same method as the direction of the vehicles, but instead
of using GPS information, it uses a digital map that tells the highway direction. For
example, highway I-95 goes from north to south, and it will always be considered as
from north to south even if the highway is curving. Figure 33 shows the directions
of the vehicles and the highways, similar to what has been used in VeMAC [5] but
with addition of highways. The reason for considering the directions of the highways
is to avoid data collisions when two highways intersect with each other.
Table 5 shows the different codes that are used in CDMA/TC-MAC. During
the cluster formation and the CH election process, vehicles on the right direction
highway (R) will use CDMA/TC-MAC code 1 to exchange messages that contain
their Clusterhead Level CHL value. Code 1 is assigned to be a global code for vehicles
on right direction highways. It has several uses, which I explain as needed. Once
the CH is elected, the CH will select a CDMA/TC-MAC code and send it to the
cluster members using code 1. If the cluster direction is R, the CH will choose a
CDMA/TC-MAC code from 2, 3, and 4, otherwise the CH will choose a code from
5, 6, and 7. The code selected by the CH should be different than the codes of the
ahead and behind clusters. If the newly formed cluster can not find out about the
codes of the other clusters, the CH will pick any code from the codes in its direction.
After determining the CDMA/TC-MAC code for the cluster, the cluster member will
use TC-MAC for intra-cluster communications, as explained in Chapter 3.
In order to minimize problems caused by the variability of the cluster range,
CDMA/TC-MAC assures the existence of two clusters with two different codes be-
tween clusters sharing the same code. In this case, three CDMA/TC-MAC codes
are necessary for each direction on the same highway. From Figure 34, if the range
of cluster B, and the gap between vehicle X in cluster A and vehicle Y in cluster C
is less than 300 m, a collision will happen between vehicles X and Y if they were

62
North
South
EastWest
Left
Direction
Right
Direction
Fig. 33. Vehicles and highway directions in CDMA/TC-MAC. Vehicles and highwaysin the dark area are Left direction, while others are Right direction
using the same code. This collision will not happen between vehicle X and vehicle
Z because they have two clusters in between, which results in having a gap that is
larger than 300 m.
5.1.2 RECOVERY PROTOCOL
The Recovery Protocol in CDMA/TC-MAC is designed to solve the issue of
having two clusters in range of each other and sharing the same code, which will lead
to interference between vehicles in both clusters. This issue will not happen unless
both clusters are on the same highway and travelling in the same direction.
The Recovery Protocol works when a vehicle in a cluster detects another vehicle
from another cluster using the same CDMA code. From Figure 35, there are two
clusters, cluster A and cluster B. When the gap between the two clusters is less than
300 m, at least one vehicle from each cluster will detect the present of the other
cluster, vehicles X and Y. If both clusters have the same CDMA code, the vehicle
X from the approaching cluster will inform its CH about the situation, cluster A.

63
TABLE 5. CDMA/TC-MAC codes
CDMA/TC-MAC Code Highway Direction Vehicle Direction
1 R R and L
2, 3, and 4 R and L R
5, 6, and 7 R and L L
8 L R and L
X
Traffic
direction
Cluster A
Code_2 Code_4 Code_3
Cluster B
Y
Cluster C
Z
Cluster D
Code_2
<300 m
>300 m
Fig. 34. Three CDMA codes are needed for each direction in CDMA/TC-MAC toavoid having two different clusters in range of each other and using the same CDMAcode
Then the CH of cluster A will pick a different CDMA code than the old one and
broadcast it to the members of its cluster. The newly picked CDMA code also needs
to be different than the code of the cluster behind, if there is one.
If there is an intersection of two highways, and two clusters from both highways
sharing the same CDMA code are passing the intersection, interference between
vehicles will happen. The recovery protocol addresses this issue. Let us assume that
there are two clusters, cluster A on a R highway and cluster B on a L highway, and
both clusters are using CDMA code 2. When they get to the intersection point, each
cluster will detect the other cluster. The cluster on highway R will change its CDMA
code, while the cluster on highway L will keep its CDMA code. The changing of code
is done in the same way as if we have two adjacent clusters sharing the same CDMA
code.
5.2 DISSEMINATING INTER-CLUSTER MESSAGES

64
X
Traffic
direction
Cluster A
Code_2 Code_2
Y
Cluster B
<300 m
Fig. 35. Two clusters are using the same CDMA code, Code 2. When the gapbetween both cluster is less than 300 m, a code conflict will be detected and therecovery protocol will start
After explaining the architecture of CDMA/TC-MAC, now I will explain how to
disseminate messages between two adjacent clusters. The goal of CDMA/TC-MAC
is to enable the transmission of all types of messages between clusters, with avoiding
the network issues. In the following, I will explain the setup process needed for the
inter-cluster communications in CDMA/TC-MAC.
5.2.1 SETUP
For all types of messages, two adjacent clusters can exchange messages without
the risk of collisions. To do so, every cluster on the road has to do the following:
• The CH needs to select at least two vehicles to monitor for other clusters.
• The selected vehicles must be located at the head and the tail of the cluster to
act as gateways (GWs) of the cluster.
• The GWs will switch to the CCH during the mini-slot 0 (virtual vehicle mini-
slot in TC-MAC) using the global code of the highway (1 or 8) to send/receive
advertisement to/from other GWs of other clusters.
• During the switching to mini-slot 0, the GWs that are located at the head of
the clusters will be listening for advertisements from the other GWs that are
located at the tail of the clusters. During the following frame, the GWs that
are located at the head of the clusters will be sending their advertisements to
the other GWs that are located at the tail of the clusters. This should solve

65
the issue of having collision when two GWs, head and tail, are trying to send
advertisements at the same time.
• The advertisement of the GWs includes the following information:
– The CDMA code of the GW’s cluster.
– The cluster size.
• Each GW will inform its own CH about the discovery, assuming both clusters
are using 2 different CDMA codes.
• The CHs will assign a local ID as in TC-MAC to the GWs of the opposite
cluster to act as a member of both clusters, assuming no clusters merge. The
new local IDs will be picked from the upper bound IDs of the cluster, which
should help the GWs not miss safety/update messages from cluster members
of their original clusters.
Once the process is completed, the GWs will switch between the CDMA codes of
the two clusters during the TDMA time slot they are assigned.
For more explanation, Figure 36 shows two adjacent clusters, A and B, within
less than 300 m gap and with two different CDMA codes. In order for cluster A
and cluster B to communicate, the GWs of both clusters need to get engaged in the
process. Let us assume that GW tail of cluster A is sending and GW head of cluster B
is receiving at time t on the mini-slot of CCH and using the CDMA global code of
Code 1. At time t :
• GW tail of cluster A will send an advertisement on the mini-slot 0 on the CCH
using CDMA code Code 1. This advertisement will include the cluster size of
A and the CDMA code used by cluster A (3, Code 2 ).
• GW head of cluster B will receive the advertisement from GW tail of cluster A.
Then, it will pass the advertisement to the CH of B during its own time
slot in cluster B using CDMA code Code 3. Note, this process will be done
within 100 msec, before GW head of cluster B sends back its own advertisement-
acknowledgement to GW tail of cluster A on the CCH.
At time t+100 msec:

66
• GW head of cluster B will send an advertisement-acknowledgement to GW tail
of cluster A. Beside its cluster’s CDMA code and size, GW head of cluster B
indicates that it has received the previous advertisement from GW tail of cluster
A, and is in the process of assigning a local ID in cluster B to GW tail of cluster
A.
• The GW tail of cluster A will receive the advertisement-acknowledgement from
GW head of cluster B, and then pass its own CH. For the next transmission
cycle, GW tail of cluster A should listen to the GW head of cluster B on CCH
during mini-slot 0 to get its own local ID in cluster B.
At time t+200 msec:
• By this time, GW head of cluster B has already received from the CH of cluster
B the local ID assigned to GW tail of cluster A.
• GW head of cluster B sends the local ID to GW tail of cluster A.
• By the end of this cycle, GW tail of cluster A should receive the local ID of
GW head of cluster B in cluster A, and it can be sent to GW head of cluster B
during its own time slot in cluster B.
After finishing the setup for the inter-cluster communications, vehicles GW tail of
cluster A and GW head of cluster B will be treated as cluster members of both clusters
A and B.
For the RSUs, the setup to join a cluster is done in very similar way to the setup of
inter-cluster communications. The difference is that the RSUs will be always listening
for an advertisement from GWs of clusters on the highway. Before joining any cluster,
the RSU will be using the global CDMA code of the highway. Once it detects
an advertisement from a GW, it will send back an advertisement-acknowledgement
asking for a local ID in the cluster. When the local ID is assigned to the RSU, the
RSU will be treated as a cluster member.
5.2.2 SAFETY AND NON-SAFETY MESSAGE DISSEMINATION
For the dissemination of safety messages, if a dangerous situation is detected in
one cluster, other clusters can be inform of the situation. This can be done as follows,
assuming the setup for inter-cluster communications is completed between clusters:

67
Traffic
direction
GW_tail
GW_headCH
Cluster A
GW_tail
GW_headCH
Code_3 Code_2
Cluster B <300 m
Code_1
Fig. 36. Two adjacent clusters with less than 300 m gap are wishing to communicate.The process will be completed by exchanging several setup messages between GW tail
from cluster A and GW head from cluster B
• The detected dangerous situation will be broadcasted to the cluster members
where it happened, as explained in Chapter 3, including the GWs.
• If the GW is connected to or in the path of the intended cluster, the GW will
rebroadcast the safety message in the other cluster during its own mini-slot in
the other cluster and using the CDMA code of the other cluster.
For non-safety message dissemination, once the inter-cluster communication setup
is completed, the process should be clear. If a cluster member needs to send a non-
safety message to another vehicle in a different cluster, it will do the following:
• The vehicle that is wishing to send a non-safety message will communicate with
the GW of its cluster that is in the path of the destination vehicle.
• If the GW is available on its SCH time slot, it will participate in the delivery
of the message. Otherwise, the sender needs to wait or find another GW.
5.3 SUMMARY
In this chapter, I presented a CDMA/TC-MAC hybrid protocol for inter-cluster
communications in VANETs. This protocol allows two neighboring clusters to com-
municate without effecting the intra-cluster communications in each cluster. It uses
different CDMA codes for each cluster that are different than the CDMA code of
the neighboring cluster. There are 8 different codes, 3 codes for each direction trav-
eling north to south, and 3 codes for each direction traveling east to west. For each

68
highway direction, there is one global code, codes 1 and 8, that can be used by the
clusters to setup the inter-cluster communications. This protocol also explains the
process of communicating with the RSUs.

69
CHAPTER 6
EVALUATION
This chapter describes the evaluation of the proposed protocols in this disserta-
tion. The evaluation is done using network simulations under different traffic scenar-
ios. I evaluated the clusterhead election, cluster formation, and TC-MAC protocols.
I will explain each one of them in a different section in this chapter.
6.1 METHODOLOGY
This section describes the experimental setup and methodology used to evaluate
the performance of the clusterhead election and cluster formation protocol, and the
TC-MAC protocol, including the network and traffic scenarios used in the evaluation.
The evaluation metrics will be described later for each protocol. I assumed all vehicle
on the road are equipped with GPS and DSRC transceivers.
6.1.1 NETWORK CONFIGURATION
I ran simulations using ns-3 network simulator [53], which is a follow-on to the
popular ns-2 simulator. For VANET, I used modules [54] that added well-known
traffic mobility models, the Intelligent Driver Model (IDM) [55] and the MOBIL lane
change model [56]. The goal was to create a vehicular network on highways with
different number of lanes and different number of vehicles.
Clusterhead Election and Cluster Formation
The network parameters used in the simulation of the clusterhead election and
cluster formation are listed in Table 6. I set the transmission range for vehicles to
300 m [57]. The transmission rate is set to be 6 Mbps, which was shown to be the
optimal data rate for VANETs [57]. The update messages are of size 200 bytes,
which is a reasonable size for safety/update messages [57]. These messages include
the basic vehicle’s information, such as speed, position, direction, velocity, and lane
on the road. Besides the basic information, the vehicle will include its Clusterhead
Level (CHL). The CHL is calculated by every vehicle trying to join the cluster based

70
TABLE 6. Network parameters used in the simulation for the clusterhead electionand cluster formation protocol
Parameter Values
TX Range 300 m
Update Message size 200 bytes
Data Rate 6 Mbps
on the calculations explained in Chapter 4. When the vehicles are the process of
creating the cluster, they will be sending their update messages using CSMA/CA
mechanism to access the medium.
TC-MAC
The network parameters used to evaluate TC-MAC as compared to WAVE are
listed in Table 7. I set the transmission range for vehicles to 300 m, which a common
transmission range that is used in VANETs [57]. So in the case of a single-hop
cluster, the maximum length of the cluster will be 300 m, and it will be 600 m for
the two-hop cluster. For safety/update messages, the maximum message size is 200
bytes [57]. Since the slot size on the SCHs in TC-MAC is 6 times the size of the
mini-slot on the CCH, the maximum non-safety message size will be 1,200 bytes. I
set the data rate to 6 Mbps, which is shown to be the optimal data rate for VANETs
[57]. For WAVE, I set the CCHI and SCHI to be 50 msec each, which will make the
transmission cycle to be 100 msec [11].
In TC-MAC, all vehicles in the cluster are using their own time slots to commu-
nicate with other vehicles. These slots are assigned to them by the CH, to communi-
cate with other vehicles; this assignment mechanism is explained in Chapter 3. For
WAVE, all vehicles are using CSMA/CA mechanism to access the medium.
6.1.2 TRAFFIC SCENARIOS
In this part of this chapter, I will explain the scenarios I used in the simulations.
The scenarios are divided into two parts. First part, explains the scenarios used
for the clusterhead election and cluster formation protocol; while the second part
explains the scenarios used for TC-MAC.

71
TABLE 7. Network parameters used in the simulation
Parameter Values for WAVE Values for TC-MAC
TX Range 300 m 300 m
Max. Safety Message size 200 bytes 200 bytes
Max. Non-Safety Message size 1200 bytes 1200 bytes
Data Rate 6 Mbps 6 Mbps
CCHI 0.05 sec N/A
SCHI 0.05 sec N/A
Clusterhead Election and Cluster Formation
The scenarios implemented for the highway are with different number of lanes
and the same traffic density. I evaluated scenarios with 2, 3, and 4 lanes. For the
traffic density, I used 50 vehicles. The highway length is 5,000 m. I used two exits in
the highway. The exits are right exits and located at the 1,500m and 3,000m marks.
The speed limit is set to 29 m/sec.
Since all the exits are right exits, only vehicles on the rightmost lane are able to
take the exit. I assumed 25% of vehicles on the rightmost lane will take the first exit,
and 25% of vehicles on the rightmost lane will take the second exit.
TC-MAC
The scenarios implemented for the highway are with different number of lanes
and different density levels. I evaluated scenarios with 2, 3, and 4 lanes. For the
traffic density levels, I used four different levels; they are Low, Med, High, and Very
High. Table 8 shows the number of vehicles per lane for each density level, as well as
the gap between vehicles in the lane and the speed limit. As the gap between vehicles
increases, the number of vehicles in the lane decreases, and this will affect the density
level on the highway. The highway length is set to 5,000 m and vehicles are set to
different speed limits. The speed limits are set to maintain particular density of the
vehicles in the road.
The simulation for the clusters is done by generating vehicles that are moving at
a speed that maintains the stability of the cluster. In other words, if the density level
is low, which means the gap between vehicles is large, the speed limit of vehicles is

72
TABLE 8. Density levels in the highway with the speed limits
Density LevelNumber of Vehicles
per Lane
Gap between
VehiclesSpeed Limit
Low 5 60 m 29 m/sec
Med 12 20 m 10 m/sec
High 20 10 m 5 m/sec
Very High 50 1 m 0 m/sec
set to high. Table 8 shows the different speed limits used in the simulations based
on the traffic density. The relationship between the speed of vehicles and the traffic
density is inverse. For example, in very high traffic density, the gap between vehicles
is 1 m and the speed limit is 0 m/sec. In the very high density case, the vehicles are
generated and the first vehicles in every lane make a complete stop at 1000 m mark.
Several scenarios have been tested for TC-MAC and WAVE using single-hop
clusters and two-hop clusters. A single-hop cluster is a cluster where all cluster
members can talk to each other directly, while a two-hop cluster is a cluster where
some cluster members need a relay node to communicate with other cluster members.
There are 12 scenarios that are implemented for TC-MAC and WAVE using a single-
hop cluster as shown in Table 9. For the two-hop cluster, I implemented another 12
different scenarios for both TC-MAC and WAVE, as shown in Table 10. Since I am
limited with the maximum number of vehicles in the cluster, based on the network
settings, I used 372 vehicles in the cluster instead of 400 vehicles when the traffic
density is very high and the number of lanes is 4. The other 28 vehicles can form
their own cluster. For the two-hop cluster in WAVE, vehicles are acting as in the
single-hop cluster. On other words, all vehicles will try to send messages whenever
they need and the air is clear to send.
6.2 CLUSTERHEAD ELECTION AND CLUSTER FORMATION
In this section, I will present the evaluation of my clusterhead election and cluster
formation protocol. The goal was to create experiments in a highway with different
number of lanes. I ran experiments to measure the stability of the cluster, in terms
of the number of times the clusterhead changes. I compared the performance of

73
TABLE 9. Scenarios for TC-MAC and WAVE using a single-hop cluster, the maxi-mum cluster length is 300 m
Scenario Density LevelNumber
of Lanes
Maximum Number of
Vehicles in the Cluster
Communication
Density
1 Low 2 10 100
2 Med 2 24 240
3 High 2 40 400
4 Very High 2 100 100
5 Low 3 15 150
6 Med 3 36 360
7 High 3 60 600
8 Very High 3 150 1500
9 Low 4 20 200
10 Med 4 48 480
11 High 4 80 800
12 Very High 4 200 2000
my algorithm with the Lowest-ID clustering, the Highest-Degree, and the Utility
Function algorithms.
6.2.1 EVALUATION METRICS
The metric used to evaluate the clusterhead election algorithm is measuring the
stability of the cluster by counting the number of CH changes. Before each exit, I
use the election algorithm to choose the CH and observe if the CH changes for the
majority of traffic after the exit.
6.2.2 EVALUATION
In this part, I will evaluate the performance of the Clusterhead election algorithm
and compare it to the Lowest-ID clustering algorithm, the Highest-Degree algorithm,
and the Utility Function algorithm. I will evaluate each algorithm under all scenarios
with 10 different runs for each scenario.
Since my clusterhead election algorithm is based on having the knowledge of the

74
TABLE 10. Scenarios for TC-MAC and WAVE using a two-hop cluster, the maxi-mum cluster length is 600 m
Scenario Density LevelNumber
of Lanes
Maximum Number of
Vehicles in the Cluster
Communication
Density
1 Low 2 20 200
2 Med 2 48 480
3 High 2 80 800
4 Very High 2 200 2000
5 Low 3 30 300
6 Med 3 72 720
7 High 3 120 1200
8 Very High 3 300 3000
9 Low 4 40 400
10 Med 4 96 960
11 High 4 160 1600
12 Very High 4 372 3720
vehicle’s lane, the Lane Weight (LW ) of each lane needs to be calculated; this can
be done for each lane in the highway as explained in Chapter 4. In the case of 2-lane
highway, the leftmost lane is NE lane and the rightmost lane is RE lane. So, the
values of LWNE and LWRE are equal to 0.5. For the 3-lane highway, there are 2
NE and 1 RE. The value of LWNE = 2/3 and the value of LWRE = 1/3. For the
4-lane highway, there are 3 NE and 1 RE. The value of LWNE = 3/4 and the value
of LWRE = 1/4.
Figure 37 shows the number of CH changes for each clusterhead election algorithm
after the first exit. It is clear that my clusterhead election algorithm (labelled Traffic
Flow) generally performed better than the others. I noticed that in the case of the 2-
lane highway, my algorithm and the Utility Function suffered from two CH changes.
The reason for that is my algorithm treated both lanes equally. In other words, the
LW for the NE and RE are the same.
Figure 38 shows the number of CH changes for each clusterhead election algo-
rithm after the second exit. The results show that my clusterhead election algorithm
performed better than the other algorithms. The CH using my algorithm did not

75
0
1
2
3
4
5
1 2 3 4
Num
ber
of C
lust
erhe
ad C
hang
es
Number of Lanes in the Highway
Lowest-ID
Highest-Degree
Utility Function
Traffic Flow
Fig. 37. Clusterhead changes vs. number of lanes in the highway after the first exit
change after the second exit in 3-lane and 4-lane highways.
The overhead of the clusterhead election process is as simple as update messages
broadcasted by each vehicle in order to signal existence of itself to all its neighbors.
As a result of receiving the update messages from all neighboring vehicles, each
vehicle is able to dynamically build up its latest neighbor list and calculate the CHL
and send it with the next update message.
6.2.3 SUMMARY
I presented an algorithm for clusterhead election based on the traffic flow of
vehicles in the highway. With the availability of lane detection, lane direction and
map matching, this algorithm was able to select the most stable clusterhead. I tested
this algorithm using a highway with a two exit scenario and followed the elected
clusterhead passing the two exits. This algorithm showed longer clusterhead lifetime
than the Lowest-ID, Highest-Degree and the Utility Function algorithms.
6.3 TC-MAC PROTOCOL
In this section, I will present the evaluation of TC-MAC. The goal was to run

76
0
1
2
3
4
5
1 2 3 4
Num
ber
of C
lust
erhe
ad C
hang
es
Number of Lanes in the Highway
Lowest-ID
Highest-Degree
Utility Function
Traffic Flow
Fig. 38. Clusterhead changes vs. number of lanes in the highway after the secondexit
experiments on a highway with different levels of vehicle densities and evaluate TC-
MAC as compared with WAVE standard. I ran 5 runs and calculated the average
for each scenario and measured the reliability of safety messages and the throughput
of non-safety messages.
Safety/update messages are periodically broadcast information to surrounding
vehicles. These messages provide every vehicle in the cluster with accurate and timely
information about their neighbors. Update messages are very important in detecting
the possibility of unsafe situations, while safety messages are important in informing
the vehicles about the unsafe situations. Therefore, safety/update messages need
to be sent by each vehicle in every TC-MAC frame, every 100 msec [11]. In the
experiments of evaluating the reliability of safety/update messages, every vehicle is
trying to send a safety/update message every 100 msec. Besides being broadcasted
at a high generation rate, safety/update messages require a high reliability level.
Achieving a high level of reliability is a challenge for broadcasting safety/update
messages. Before running the scenarios of the single-hop cluster, I calculated the
communication density (CD) [58] on the road. CD is used to measure the channel
load in vehicular communications. This is done by calculating the number of carrier
sensible events per unit of time. Table 9 shows the CD of the single-hop clusters,

77
and Table 10 shows the CD of the two-hop clusters. In the two-hop clusters, the
CD of the vehicles that are in the middle and in range of all the cluster members
is calculated as if they all were in a single-hop cluster. For example, if we have a
two-hop cluster of the size of 372, and we have a vehicle that can hear every vehicle
in the cluster, the CD would be 3720.
6.3.1 TC-MAC FRAME
With the transmission cycle of 100 msec, the frame size of TC-MAC is set to be
100 msec. Based on the above network configuration used in the simulation, we can
find out the maximum number of vehicles that can be in one cluster using TC-MAC.
To calculate the maximum number of vehicles in the cluster, we need to find the
time needed to transmit a 200 byte safety message on the CCH, or the time needed
to transmit a 1,200 byte non-safety message on the SCHs.
For a 200 byte safety message, the time needed to be transmitted on the CCH is:
1600b× 1,000msec6,000,000b
= 0.267msec
And for a 1,200 byte non-safety message, the time needed to be transmitted on
any of the SCHs is:
96, 000b× 1,000msec6,000,000b
= 1.6msec
Since the maximum slot size on the SCHs is 1.6 msec and the frame size is 100
ms, the number of slots on each SCH in one TC-MAC frame is:
⌊ FrameSize
SCHMaximumSlotSize⌋ = ⌊100msec
1.6msec⌋ = 62slots
Since DSRC has 6 different SCHs, the number of vehicles allowed to be in one
cluster in TC-MAC is 6 × 62 = 372 vehicles. Figure 39 shows the layout of the
TC-MAC frame used in my simulations.

78
Fig.39.TC-M
AC
fram
ebased
onmax
imum
safety
message
size
of200bytesan
dmax
imum
non
-safetymessage
size
of1,200
bytes.

79
6.3.2 TC-MAC EVALUATION METRICS
The metrics used to evaluate TC-MAC andWAVE are to measure the reliability of
safety/update messages and the throughput of the non-safety messages. The metrics
are as follows:
1. Reliability of safety messages: Here I measure the percentage of the successful
delivery of safety/update messages for both TC-MAC and WAVE. For TC-
MAC, I did the measurement in two ways, direct and indirect messages. The
direct safety/update messages are the messages that are received without being
rebroadcasted by the CH, while the indirect safety/update messages are the
ones that are received after being rebroadcasted by the CH.
2. Throughput of non-safety messages: Here I measure the the throughput of the
non-safety messages on the SCHs. For TC-MAC, I calculated the optimal and
the the worst case throughput. The optimal throughput is when every vehicle in
the cluster is sending a non-safety message to another cluster member that have
different slot number on the SCHs. On other words, in every time slot on the
SCHs, all six vehicles are sending non-safety messages and some other vehicles
in the cluster are receiving the same messages. The worst case throughput is
when we have three vehicles of the same slot number on the SCHs sending
non-safety messages to the other three vehicles on their slot on the SCHs. In
the simulation, when the vehicle is sending a non-safety message, the receiving
vehicle is picked randomly. In some cases, the sending and the receiving vehicles
were on the same time slot on the SCHs. For WAVE, every vehicle is trying
to send a non-safety message during the SCHI. The safety messages are on
the CCH during each vehicle’s mini-slot in TC-MAC and during the CCHI in
WAVE. The throughput was measured in terms of kbps.
In the simulation, I use a single-hop cluster. So, the non-safety messages are
going from the source vehicle to the destination directly and without the need
of having another cluster member to act as a relay node. The reason is here I
am trying to measure the throughput of the network, without the dealing with
routing issues.
6.3.3 SINGLE-HOP CLUSTER EVALUATION

80
In the single-hop cluster, all cluster members are in range of each other. So, every
vehicle in the cluster is able to send and receive messages directly from other vehicles
in the same cluster. Based on the transmission range used in the simulations, every
vehicle in the single-hop cluster is within 300 m away from any other vehicle in the
same cluster.
Reliability of Safety/Update Messages
In this part of this chapter, I show the performance of TC-MAC and WAVE, in
terms of safety/update message reliability. The results are displayed in two different
ways, direct and indirect safety/update messages.
• Direct Safety/Update messages
For the results of direct safety/update message delivery, I measured the per-
centage of missed direct messages. If the cluster size is 15 vehicles, the number
of direct safety/update messages should be 14 messages, one for each vehicle
per 100 msec. Figure 40 shows the performance of TC-MAC under different
communication densities, assuming that all vehicles in the cluster are engaged
in some communication during their own SCH time slot. When the density
is low, the percentage of the missed direct messages between vehicles is high
in TC-MAC. The reason for that is switching to the SCHs. For example, if
there are 15 vehicles in a single-hop cluster, these vehicles will be assigned to
local IDs from 1 to 15. So, vehicles with local IDs 1 to 5 will be using slot 0
of TC-MAC frame on SCHs 1 to 5, and vehicles with local IDs 6 to 11 will be
using the mini slots on the CCH during slot 0 of the same TC-MAC frame. If
vehicles 1 to 5 are using their time slots on the SCHs, they will miss all the
safety/update messages sent by vehicles 6 to 11. This happens only when all
the vehicles in the cluster are engaged in some communication during their own
SCH time slot. TC-MAC has addressed this issue by having the CH resend
the needed safety messages during the unused slots on the CCH. When at least
half of the vehicles in the cluster are engaged in communication during their
own SCH time slot, the percentage of missed direct safety/update messages
decreases. Figure 41 shows the performance of TC-MAC using a single-hop
cluster when only half of the vehicles in the cluster are using their slot on the
SCHs. If the vehicles in the cluster are less involved in communications on the

81
0
10
20
30
40
50
60
0 200 400 600 800 1000 1200 1400 1600 1800 2000
% o
f Mis
sed
Dire
ct S
afet
y/U
pdat
e M
essa
ges
Communication Density
240
360
480
TC-MAC Two Lanes
TC-MAC Four Lanes
TC-MAC Three Lanes
Fig. 40. Percentage of missed direct messages for TC-MAC in a single-hop clusterbased on the communication density. All vehicles in the cluster are engaged incommunications during their own slot time on the SCHs
SCHs, the percentage of the missed direct safety/update messages decreases.
Unfortunately, if a vehicle is always active on its own slot on the SCH, this
vehicle will miss all the update messages from all vehicles that have their mini-
slots at the same time as the active vehicle, see Figure 39. Figure 42 shows
the results when when all vehicles and half vehicles in the cluster are engaged
in communications during their own slot time on the SCHs, it is clear that the
performance is better by factor 2 when we have half of vehicles in the cluster
are communicating on the SCHs.
On the other hand, for WAVE, I measured the percentage traffic collision on
the CCH. Figure 43 shows the performance of WAVE when the CCHI is 0.05
sec based on the number of vehicles in terms of traffic collision. The percentage
of collisions on the CCH increases as the traffic density increases. The reason
for this is the increase of messages that need to be sent during the CCHI.
• Indirect Safety messages
For the indirect safety/update messages, TC-MAC rebroadcasts safety mes-
sages but not update messages. Missing an update message is not as critical as

82
0
5
10
15
20
25
30
0 200 400 600 800 1000 1200 1400 1600 1800 2000
% o
f Mis
sed
Dire
ct S
afet
y/U
pdat
e M
essa
ges
Communication Density
240
360
480
TC-MAC Two Lanes
TC-MAC Four Lanes
TC-MAC Three Lanes
Fig. 41. Percentage of missed direct messages for TC-MAC in a single-hop clusterbased on the communication density. Half of the vehicles in the cluster are engagedin communications during their own slot time on the SCHs
a safety message. Vehicles can predict the positions and the movement of the
surrounding vehicles from the previous update messages. However, because of
their importance and short lifetime, safety messages need to have high reliabil-
ity. The process of rebroadcasting the safety messages in TC-MAC is done by
the CH during its own mini-slot and all unused mini-slots on the CCH. In the
case of the single-hop cluster, the maximum number of vehicles in the scenarios
I tested was 200 vehicles. The CH was able to rebroadcast the safety messages
to the cluster members using 173 unused mini-slots on the CCH, including its
own. All cluster members were able to receive every missed direct message
within 100 msec.
On the other hand, in WAVE, there is no rebroadcast by the CH. When the
vehicle is trying to send its safety/update message, and it observes a collision
on the CCH, the vehicle will try to send the message again during the same
CCHI. Figure 44 shows that if the density of vehicles is high, the CCH gets
more congested, which will reduce the reliability of safety messages.

83
0
10
20
30
40
50
60
0 200 400 600 800 1000 1200 1400 1600 1800 2000
% o
f Mis
sed
Dire
ct S
afet
y/U
pdat
e M
essa
ges
Communication Density
TC-MAC Two Lanes
TC-MAC Four Lanes
TC-MAC Three Lanes
All using SCH
Half using SCH
Fig. 42. Percentage of missed direct messages for TC-MAC in a single-hop clusterbased on the communication density. It shows the performance when all vehicles andhalf vehicles in the cluster are engaged in communications during their own slot timeon the SCHs
Throughput of Non-Safety Messages
For the throughput of non-safety messages, I tested TC-MAC and WAVE using
the same scenarios as in the safety/update message communications. Every vehicle
in the highway will try to send 1,200 Bytes every 100 msec. For TC-MAC, vehicles
will use their own time slot on the SCHs, while vehicles in WAVE will try to send
during the SCHI. Based on the network settings that we have, TC-MAC needs 1.6
msec to transmit a non-safety message. The SCHI value is set to 0.05 sec. Next, I
will show the results for both TC-MAC and WAVE.
• TC-MAC
From Figure 45, we can see the optimal calculated throughput of non-safety
messages using TC-MAC. This happens when every pair of vehicles in the
cluster that are engaged in communication on the SCHs has a different time
slot number. The figure also shows the worst case calculated throughput of
non-safety messages using TC-MAC; this happens only when every pair of
vehicles in the cluster that are engaged in communication on the SCHs has the

84
0
10
20
30
40
50
60
70
0 200 400 600 800 1000 1200 1400 1600 1800 2000
% o
f Tra
ffic
Col
lisio
n on
the
CC
H
(CC
HI =
0.0
5 se
c)
Communication Density
240
360
480
WAVE Two Lanes
WAVE Three Lanes
WAVE Four Lanes
Fig. 43. Percentage of collisions during the CCHI for WAVE using a single-hopcluster
same time slot number. In the simulation, I used random pairs. Some of the
pairs have the same time slot number in the SCHs, while the others do not.
The results of the simulations shows that the performance of TC-MAC is in
between the calculated values of the optimal and the worst throughput.
• WAVE
Figure 46 shows the performance of WAVE compared to the worst case of TC-
MAC. WAVE achieved a good throughput when the communication density
of vehicles in the cluster was low. As the communication density goes higher,
the throughput goes lower. The reason for that is due to the increase of the
collision on the SCHs. Even when the communication density of the vehicles
in WAVE was low, the best achieved throughput was lower that the worst
calculated throughput in TC-MAC.
6.3.4 TWO-HOP CLUSTER EVALUATION
In the two-hop cluster, not all cluster members are in range of each other. So,
not all vehicles can send and receive messages directly from other vehicles in the

85
0
10
20
30
40
50
60
70
80
90
100
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Per
cent
age
of S
afet
y m
essa
ge
Rel
iabi
lity
(CC
HI
= 0
.05
sec)
Communication Density
WAVE
Fig. 44. Reliability of safety messages in WAVE using a single-hop cluster
same cluster. Now I will explain and show the performance of TC-MAC compared
to WAVE in term of the reliability of safety/update. The throughput of non-safety
messages in the two-hop cluster was not tested because that might involve a routing
protocol, which is not the focus of this dissertation. Based on the transmission range
used in the simulations, the two-hop cluster can cover an area of up to 600 m.
Table 10 shows the scenarios tested for TC-MAC and WAVE in testing the re-
liability of safety/update messages. I ran 5 runs for each scenario. I will show the
results as the average of the runs for both protocols in following:
• TC-MAC
Figure 47 shows the performance of TC-MAC using a two-hop cluster compar-
ing to the communication density when only half of the vehicles in the cluster
are using their slot on the SCHs. From the figure, it shows that TC-MAC has
higher missed direct safety/update messages percentage in the two-hop cluster
compared to the single-hop cluster. The reason for that is when calculating
the percentage, all vehicles in the two-hop cluster are included even if they are
out of range of other vehicles in the cluster. If the missed messages are safety
messages, the CH will rebroadcast them to all vehicles in the cluster including

86
0
500
1000
1500
2000
2500
3000
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Thr
ough
put (
kbps
)
Communication Density
Optimal
Simulation
Worst Case
Fig. 45. Throughput of non-safety messages comparing to the communication densityusing TC-MAC in a single-hop cluster
the vehicles that missed them. On the other hand, if the missed messages are
update messages, this should not be an issue because these messages are from
vehicles that are more than one hop away.
• WAVE
Figure 48 shows the performance of WAVE when the CCHI is 0.05 sec based
on the Communication Density of vehicles in terms of traffic collision. From the
figure, it is clear that as the Communication Density goes high, the percentage
of traffic collision on the CCH goes high. The main reason for this issue is
that every vehicle in the cluster is trying to compete to send its safety/update
messages during the CCHI.
6.3.5 SUMMARY
I presented the TC-MAC protocol for intra-cluster communications in VANETs.
I ran different simulations for TC-MAC along with WAVE to test the performance of
TC-MAC compared to WAVE. TC-MAC showed that it can support higher reliability

87
0
200
400
600
800
1000
1200
1400
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Thr
ough
put
(kbp
s) o
n th
e SC
Hs
(SC
HI =
0.0
5 se
c)
Communication Density
WAVE
Offered Load/TC-MAC (Worst Case)
Fig. 46. Throughput of non-safety messages under different communication densitiesusing WAVE in a single-hop cluster
of safety/update messages than WAVE standard, even in high density scenarios.
Also, TC-MAC performed in collision free way by using TDMA. Not only were
safety/update messages able to be delivered using TC-MAC, but non-safety messages
also had a good throughput performance even when the traffic density was high.
Every vehicle in TC-MAC has its own chance to perform non-safety communication
in every 100 msec, without affecting their chances of sending/receiving safety/update
messages. On the other hand, WAVE suffered from high traffic density. For WAVE,
as the traffic density increases, the collision on the CCH increases.

88
0
10
20
30
40
50
60
70
80
90
100
0 400 800 1200 1600 2000 2400 2800 3200 3600 4000
% o
f Mis
sed
Dire
ct S
afet
y/U
pdat
e M
essa
ges
Communication Density
TC-MAC
Fig. 47. Percentage of missed direct safety/update messages for TC-MAC in a two-hop cluster based on the communication density. Assuming that half of the vehiclesin the cluster are engage in any sort of communications during their own slot timeon the SCHs
0
10
20
30
40
50
60
70
80
90
100
0 400 800 1200 1600 2000 2400 2800 3200 3600 4000
% o
f Tra
ffic
Col
lisio
n on
the
CC
H
(CC
HI=
0.05
sec
)
Communication Density
WAVE
Fig. 48. Percentage of collisions safety/update messages during the CCHI for WAVEusing a two-hop cluster

89
CHAPTER 7
APPLICATIONS USING TC-MAC
In this chapter I will describe a peer-to-peer (P2P) file sharing scheme for
VANETs as an application that works under TC-MAC. This scheme aims to de-
velop a P2P file sharing algorithm to improve the file downloading time between
neighbouring vehicles.
The chapter is organized as follows. Section 1 gives a background of file sharing
techniques in VANETs. Section 2 describes my P2P scheme in detail. Section 3
discusses the evaluation.
7.1 BACKGROUND OF FILE SHARING TECHNIQUES IN
VANETS
The development of Peer-to-peer systems in VANET has been one of the hot
topics in Vehicular Networks in the recent years. A number of the proposed systems
for peer-to-peer rely on either on an existing (or imaginary) infrastructure or cellular
system. Abuelela et al [59] introduced a zero-infrastructure peer-to-peer system for
VANET (ZIPPER). ZIPPER is designed mainly to support multimedia streaming
in VANETs such as movies and music. In CarTorrent [60], a work that extends
the BitTorrent protocol to the vehicular networks scenarios, addressing issues such
as intelligent peer and piece selection given the intermittent connectivity to prein-
stalled access point was proposed. Lee et al. [60] have implemented and deployed
CarTorrent on a real VANET, which is the first implementation of a content shar-
ing application on a real vehicular ad hoc test-bed. However, given the hundreds
of highways miles at which there are hardly enough budget to maintain and install
lights on the roads, installing gateways every 2-10 miles will be very expensive and
not a practical solution. Liu et al [61] proposed Mobile Chord (MChord) which is an
enhancement the P2P performance over Vehicular Ad hoc Network (VANET).
Various types of application that work on peer-to-peer systems can be imple-
mented in VANET since peer-to-peer (P2P) is a powerful platform for a variety
of multimedia streaming applications over the Internet such as video-on-demand,
video conferencing and live broadcasting. Hossain et al. studied a case study of a

90
peer-to-peer video conferencing system in VANET [62]. Hossain et al. distinguishes
between active and passive participants and enhances the video quality of the active
participant.
In PAVAN [63], a cellular network is used to broadcast a file description to all
vehicles in a certain area. If a vehicle is interested in a file, a route should be
discovered and maintained between it and the owner of the file. Scalability is an
issue in PAVAN. AS the number of vehicles increases, the cellular network cannot
handle all the requests and load of transmission.
7.2 P2P FILE SHARING IN VANETS USING TC-MAC
I propose a P2P file sharing scheme for VANETs on top of the TC-MAC protocol.
The goal of the proposed work is to allow neighbouring vehicles to run non-safety
applications such as large-scale file sharing and media streaming services in VANETs.
I use the length of the TDMA frame as in TC-MAC, 100 msec. In this case, I can
guarantee that every vehicle in the cluster sends one update/safety message every
100 msec to meet the safety message requirements.
To explain the P2P file sharing protocol using TC-MAC, suppose vehicle i wishes
to share a large file with vehicle j ; setting up a connection between them is done as
follows:
1. By tuning in to vehicle j’s own mini-slot, vehicle i determines whether or not
vehicle j is available.
2. If so, vehicle i transmits a handshake packet on channel j mod k during time
slot ⌊ jk⌋.
3. Since they are sharing a large file, vehicle i will ask a permission from the the
CH to use other time slots on the SCHs.
4. CH will check for unused time slots on the SCHs and grant them to vehicles
i and j. These granted time slots on the SCHs could be available because no
vehicles assigned to their IDs, or because the vehicles assigned to them are
un-active.
5. Now, vehicles i and j can start the transmission.
To ensure that vehicles i and j are still receiving update messages from other
vehicles nearby during the transmission of the shared file, vehicles i and j will use

91
Listening
to CCH
Listening
to SCH
TDMA Frame 1
Slot 0
Slot 34 Listening
to SCH
Listening
to CCHSlot 0
Slot 34
TDMA Frame 2
First half Second half First half Second half
Fig. 49. The switching between two halves in one TDMA frame in P2P file sharing.The pair of vehicles that are involved in P2P file sharing will listen to the CCH infirst half of the first TDMA frame and will use the time slots on the SCHs in thesecond half of the TDMA frame, and vice versa in the following TDMA frame
the granted time slots on the SCHs in the first half of the TDMA frame, and switch
to the CCH during the second half of the TDMA frame. In the following TDMA
frame, vehicles i and j will keep listening to the CCH, and then switch to the granted
time slots on the SCHs in the second half of the TDMA frame. This process will
continue until the file transmission is completed, or interrupted by the CH due to
changes in the availability of the unused time slots (Figure 49).
Because vehicles in the process of transmitting a large file will switch between
the two halves of the TDMA frame, they will only hear update/safety messages from
other nearby vehicles every 200 msec. To solve this issue, we need to differentiate
between the messages that are missed. If the missed messages are position update
messages, the receiver can predict the movement of the sender during this time. On
the other hand, if the missed messages are safety messages that are triggered by
changes in vehicle behavior, the sender will collect feedback on its recent broadcast
message from other vehicles and resend the safety message, if needed. This feedback
is done using the Piggybacked Acknowledgement (PACK) protocol [41], which places
the following information in each outgoing safety message:
• Sender’s position
• The intended range of reception
• A randomly generated message ID
• IDs of most recently received messages (of which this sending node is within
their intended ranges)
• The reception time (timeearliest) of the earliest message in the acknowledgement
list

92
If vehicle i receives a message Mj from vehicle j, i is able to infer feedback on its
recently transmitted message Mi if and only if two conditions are met: j is within
the intended range of Mi, and the attached timeearliest in Mj is earlier than the time
Mi is sent.
For an illustration, assume vehicle A with local ID=4 wants to share a 4 MB MP3
file with vehicle B with local ID=15. Vehicle A will make the handshake with vehicle
B and will request time slots on the SCHs from the CH. Assuming that vehicle A
and B will be granted the requested time slots, the transmission will take place as
follow (Figure 50):
• Vehicle A will use (S1, SCH3) to send 1200 bytes to vehicle B.
• The CH will allow vehicles A and B to borrow slots from other cluster members.
Assume all time slots are on SCH 3.
• In order for vehicles A and B to hear the surrounding vehicles, they will use the
granted slots from one half of the TDMA frame and alternate with the other
half in the following TDMA frame.
• Vehicles A will transfer data to vehicle B using slots from S2 to S33 on SCH 3.
• In the following frame, vehicle A and B will use slots from S34 to S64 on SCH3.
• During slot S65, vehicle A will switch to the CCH to broadcast update/safety
messages to other cluster members.
• During slot S0, vehicle B will switch to the CCH to broadcast update/safety
messages to other cluster members.
The total number of slots needed for the file to be transferred from vehicle A to
vehicle B (Assuming the slot in SCH can send 1200 bytes of data) = the file size /
slot size. If we have a file of size 4 MB, the vehicles need 3347 slots on the SCH to
complete the transfer.
7.3 EVALUATION
To evaluate our P2P file sharing scheme, we assume we have a single-hop cluster,
where vehicles can communicate with each other directly. The parameters for the
network are listed in Table 11. We assume we have a full cluster; where all local IDs

93
Fig. 50. An example of two vehicles A and B sharing a file under TC-MAC. Firsthalf granted time slots are in green color and the second half are in blue color.
TABLE 11. Testing parameters
Parameters Values
Cluster Length 300 m
TX Range 300 m
Safety Packet Size 200 bytes
Non-Safety Packet Size 1200 bytes
Data Rate 6 Mbps
Mini Slot Size 0.26 msec
SCH Slot Size 1.52 msec
Frame Size 100 msec
Number of Slots in the Frame 65
Shared File Size 4, 8, 12 MB
are assigned to vehicles in the cluster. We calculated the download time of a file for
one pair of vehicles under different level of slots availabilities. Table 12 shows the
percentage of the active vehicles in the cluster that I used in the simulation.
I evaluated the application through detailed simulation. We used the ns-3 network
simulator [53], which is a follow-on to the popular ns-2 simulator. For VANETs, we
used modules [54] that added well-known traffic mobility models, the Intelligent
Driver Model (IDM) [55] and the MOBIL lane change model.
For our P2P file sharing scheme, the results in Figures 51, 52, and 53 show that
even when all vehicles in the cluster are using their time slots to communicate, P2P
file sharing still works but it takes longer time to download the file.

94
TABLE 12. Levels of active vehicles in the cluster
Slots Availability
Level in SCH
Percentage of The Busy
Slots on SCH
Number of
Slots Borrowed
High 10 58
Med 50 32
Low 80 12
Very Low 100 0
For an illustration, we will show how we calculated the download time for a file in
our P2P file sharing scheme. Assume we have 4 MB MP3 file to be shared between
two vehicles in the cluster. Using the network setting in Table 11, the minimum time
needed to transfer the file is 5.086 sec, or 3347 SCH slot times. Based on the size
of the cluster, the activity of the cluster members, and the local IDs of the vehicles,
the time needed to transfer a file may vary.
Let us assume we have two vehicles, A and B. If vehicle A and vehicle B are on
different slot numbers on the SCH, and the cluster is filled with vehicles that are not
using their slots on the SCHs, the time to download is calculated as follows:
Number of slots that vehicle A and vehicle B can listen to on the SCHs
= Number of slots in the TDMA frame - 2
= 66 - 2 = 64.
The reason we subtracted 2 is because vehicle A needs to switch to the CCH to
send an safety/update message during its own mini-slot time, and this slot is different
than vehicle B ’s mini-slot time. Since the P2P file sharing scheme uses one half of
the available time slots in every TDMA frame, vehicles A and B will have only 32
slots on the SCH every TDMA frame. So, the total TDMA frames needed for the
file to be transferred from vehicle A to vehicle B is:
Number of slots needed to transfer the file / number of usable slots in the TDMA
frame
= 3347 / 32
= 105 frames. Since the frame is equal to 100 msec, the time needed to download
a 4 MB file from vehicle A to vehicle B is 10.5 sec.
7.4 SUMMARY

95
# of Slots Borrowed
0
100
200
300
400
500
600
0 12 24 36 48 60
Avg
. Dow
nloa
d Ti
me
(Sec
onds
) 4 MB
0 12 32 58
Fig. 51. Time to download 4 MB file using P2P file sharing scheme. There are amaximum of 58 slots available for borrowing.
In this chapter, we presented a P2P file sharing protocol using TC-MAC for
VANETs. Unlike WAVE, when the number of vehicles that are involved in P2P file
sharing is high, vehicles are still able to perform file sharing in each TDMA frame.
We also explained the P2P file sharing scheme by using examples. The evaluation
results shows that our scheme is able to file share between vehicles, as well as meeting
the requirements of the safety messages.
In the future, we will further develop our scheme to have P2P file sharing between
vehicles in different clusters. We are also interested in developing a better scheme
to ensure the delivery of safety messages than what is proposed in the Piggyback
Acknowledgement protocol.

96
0
100
200
300
400
500
600
0 12 24 36 48 60
Avg
. Dow
nloa
d Ti
me
(Sec
onds
) 8 MB
# of Slots Borrowed
0 12 32 58
Fig. 52. Time to download 8 MB file using P2P file sharing scheme. There are amaximum of 58 slots available for borrowing.
0
100
200
300
400
500
600
0 12 24 36 48 60
Avg
. Dow
nloa
d Ti
me
(Sec
onds
) 12 MB
# of Slots Borrowed
0 12 32 58
Fig. 53. Time to download 12 MB file using P2P file sharing scheme. There are amaximum of 58 slots available for borrowing.

97
CHAPTER 8
CONCLUSION
In this chapter I summarize the motivation for this dissertation, the problem I
have addressed, and the solutions I have proposed. The work in this dissertation
also projects future research. The chapter is organized as follows: Section 1 ad-
dresses the summary and main motivation of this dissertation. Section 2 lists the
contributions of this dissertation. Section 3 explains the proposed techniques for
improving the communications in VANETs and their evaluations. Future extensions
and developments of this work are shown in Section 4.
8.1 SUMMARY
Improving the safety and comfort of drivers and passengers by wirelessly exchang-
ing information between vehicles and roadside units (RSUs) presents a major driving
force for the design of Vehicular Ad-hoc Networks (VANETs). Several applications
have been designed for VANETs, including safety and non-safety applications. Most,
if not all, of the applications in VANETs require exchanging messages among vehi-
cles and RSUs. There are three different types of messages in VANETs: periodic
(update), event-driven (safety), and informational (non-safety) messages. Each type
of these messages has its own usage, importance, priority, and generating rate.
Dedicated Short Range Communication (DSRC) is the 75 MHz wide spectrum
band allocated by the U.S. Federal Communication Commission (FCC) for commu-
nications in VANETs. The spectrum band is divided into seven 10 MHz channels,
one Control Channel (CCH), and six Service Channels (SCHs). The CCH is the
default channel for the exchange of safety and update messages, while the SCHs are
the default channels for non-safety.
The IEEE has completed the 1609 family of standards for Wireless Access in
Vehicular Environments (WAVE) standard for vehicular communications. In WAVE,
IEEE 1609.4 describes a concept of channel intervals in which time is divided into
alternating Control Channel and Service Channel Intervals (CCHI and SCHI ). The
general concept calls for each interval to be 50 msec long. A pair of a CCHI and

98
SCHI forms a Sync Interval (SI) with the length of 100 msec, which is motivated
by a desire of having a safety messages rate of 10 Hz. This desire is based on the
allowable latency requirements of Life-Critical safety applications.
Unfortunately, channel switching in WAVE cannot support both safety and non-
safety applications with high reliability at high traffic densities. Either safety appli-
cations or non-safety applications must be compromised. Since safety applications
have higher priority than non-safety applications, and to maintain the 100 msec
requirement of safety messages, non-safety applications may be shut down.
This dissertation has proposed vehicular communication protocols to overcome
existing challenges and support safety and non-safety applications. I have designed
a Cluster-based Medium Access Control (MAC) protocol for communications in
VANETs that uses the Time Division Multiplexing Access (TDMA) technique.
8.2 CONTRIBUTIONS
In this dissertation, I have made the following contributions:
• A multi-channel cluster-based TDMA MAC protocol to coordinate intra-cluster
communications (TC-MAC). The proposed protocol can be used for clustering
management and communications. This protocol integrates the centralization
approach of clusters and a new scheme for slot reservation, using cluster mem-
bers’ local IDs. In this technique, all vehicles are able to tune to the CCH or
one of the SCHs if needed during the time cycle. In other words, the time cycle
is not divided into two different intervals, CCHI and SCHI, as with WAVE.
• A CH election and cluster formation algorithm based on the traffic flow and
design a cluster maintenance algorithm that benefits from our cluster forma-
tion algorithm. Rather than considering some of VANET characteristics in the
election of the CH, my algorithm puts into account the traffic flow on the road.
The design and implementation of this CH election and cluster formation algo-
rithm shows fewer CH changes, which reduces the overhead of re-clustering and
delivers an efficient hierarchical network topology. During the cluster formation
process, the cluster members will be assigned local IDs by the CH. Vehicles in
VANETs are allowed to move freely, therefore, I propose a new cluster main-
tenance algorithm that handles topology changes caused by mobility changes.
The proposed algorithm takes advantage of the local IDs that are assigned in

99
our cluster formation algorithm.
• A multi-channel cluster-based CDMA/TDMA hybrid MAC protocol to coordi-
nate inter-cluster communications. I propose a MAC protocol that enables
vehicles to communicate with vehicles in different clusters and with RSUs. In
addition, the hidden and exposed terminal problems are addressed by the pro-
posed protocol.
8.3 EVALUATION
The evaluation was performed in the ns-3 network simulator. For VANETs, I
used modules that added well-known traffic mobility models, the Intelligent Driver
Model (IDM) and the MOBIL lane change model. The goal was to create a vehicular
network on highways with different number of lanes and different number of vehicles.
8.3.1 CLUSTERHEAD ELECTION
I evaluated the algorithm for clusterhead election based on the traffic flow of
vehicles in the highway. With the availability of lane detection, lane direction and
map matching, this algorithm was able to select the most stable clusterhead. I tested
this algorithm using a highway with a two exit scenario and followed the elected
clusterhead passing the two exits. This algorithm showed longer clusterhead lifetime
than the Lowest-ID, Highest-Degree and the Utility Function algorithms.
8.3.2 TC-MAC
I evaluated the TC-MAC protocol for intra-cluster communications in VANETs.
I ran different simulations for TC-MAC along with WAVE to test the performance of
TC-MAC compared to WAVE. TC-MAC showed that it can support higher reliability
of safety/update messages than WAVE standard, even in high density scenarios.
Also, TC-MAC performed in collision free way by using TDMA. Not only were
safety/update messages able to be delivered using TC-MAC, but non-safety messages
also had a good throughput performance even when the traffic density was high.
Every vehicle in TC-MAC has its own chance to perform non-safety communication
in every 100 msec, without affecting their chances of sending/receiving safety/update
messages. On the other hand, WAVE suffered from high traffic density. For WAVE,
as the traffic density increases, the collision on the CCH increases.

100
8.4 FUTURE WORK
From this dissertation, there are some clear directions for the future work. These
directions can be classified as further analysis of TC-MAC, designing a numbering
scheme for cluster members, enhancing the utilization on the SCHs, and developing
speed-based clustering.
As in all evaluations, there is more analysis that can be performed. I would like
to further investigate the effect of guard intervals (GIs) on the number of cluster
members and message size.
For the numbering scheme for cluster members, the CH in TC-MAC assigns the
local IDs to the cluster members starting from ID 2 to Nmax − 1. These IDs are
assigned in order. So, if there are eleven vehicles in the cluster, the vehicles will have
IDs from 1 to 11. In this way, vehicles with IDs 6 to 11 will have their mini-slots
during S0 of the TC-MAC frame. For vehicles with IDs 1 to 5, their time slots on the
SCHs will be during S0 of the TC-MAC frame as well. So, if any vehicle with IDs 1 to
5 is communicating on its own slot on the SCHs, this vehicle will miss all the update
messages from the other cluster members on the CCH. The new numbering scheme
should make the percentage of missed update messages less than the current scheme.
This can be achieved by giving the cluster members local IDs in a way that makes
the number of vehicles that are sharing the time slot on the SCHs as minimum as
possible. On other words, the CH should start assigning IDs from the slots that have
no vehicles using them on the SCHs. If all slots on the SCHs has at least one vehicle
using it, the CH will start assigning IDs from the slots that have the least number of
vehicles. This process continues until the cluster reaches its maximum capacity. The
peer-to-peer file sharing protocol, discussed in Chapter 7, shows some enhancements
on utilizing the SCHs. What I would like to do is to improve the utilization on the
SCHs even more to make it as close as possible to the optimal values. Also, I would
like to study the impact of the enhancement on the safety/update messages reliability
and the overhead. The clustering formation algorithm I used in this dissertation is
based on the highways in the U.S., where all the lanes on the highway have the same
speed limit. However, in other countries, the highway may have different speeds
based on the lane. So, using the same clustering formation for such highways will
make the process of new vehicles joining and leaving the cluster more frequent, which
may lead to an increase overhead. I would like to investigate the impact of using a
new clustering formation algorithm on the performance of TC-MAC.

101
REFERENCES
[1] S. Yang, H. Refai, and X. Ma, “CSMA based inter-vehicle communication using
distributed and polling coordination,” in Proc. of the 8th IEEE Conference on
Intelligent Transportation Systems (ITSC ’05), Sept. 2005, pp. 167 – 171.
[2] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments
(WAVE) - Multi-Channel Operation,” IEEE Std 1609.4-2006, 2006.
[3] “Draft Amendment to Part 11: Wireless Medium Access Control (MAC) and
Physical Layer (PHY) specifications: Wireless Access in Vehicular Environ-
ments,” IEEE WG, IEEE 802.11p/D2.01, 2007.
[4] F. Yu and S. Biswas, “Self-Configuring TDMA Protocols for Enhancing Vehicle
Safety With DSRC Based Vehicle-to-Vehicle Communications,” IEEE Journal
on Selected Areas in Communications, vol. 25, no. 8, pp. 1526–1537, 2007.
[5] H. A. Omar, W. Zhuang, and L. Li, “VeMAC: A novel multichannel MAC
protocol for vehicular ad hoc networks,” in Proc. of the IEEE Conference on
Computer Communications Workshops (INFOCOM WKSHPS), Apr. 2011, pp.
413 –418.
[6] World Health Organization. [Online]. Available:
http://www.who.int/features/factfiles/roadsafety/en/index.html
[7] D. Schrank, T. Lomax, and S. Turner, “2010 Annual Urban Mobility Report,”
Texas Transportation Institute, The Texas A&M University System, Tech. Rep.,
2010.
[8] United States Department of Transportation. Intelligent Transportation
Systems. [Online]. Available: www.its.dot.gov/index.htm
[9] A. E2213-03, “Standard specification for telecommunications and information
exchange between roadside and vehicle systems – 5 GHz band dedicated short
range communications (DSRC) medium access control (MAC) and physical layer
(PHY) specifications,” ASTM International, July 2003.
[10] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments
(WAVE) - Architecture,” IEEE Std 1609.0-2007, 2007.

102
[11] Q. Chen, D. Jiang, and L. Delgrossi, “IEEE 1609.4 DSRC multi-channel oper-
ations and its implications on vehicle safety communications,” in Proc. of the
2009 IEEE Vehicular Networking Conference (VNC). IEEE, Oct. 2009, pp.
1–8.
[12] Z. Wang and M. Hassan, “How much of DSRC is available for non-safety use?” in
Proc. of the fifth ACM international workshop on VehiculAr Inter-NETworking,
ser. (VANET), 2008, pp. 23–29.
[13] J. J. Blum, A. Eskandarian, and L. J. Hoffman, “Challenges of Intervehicle
Ad Hoc Networks,” IEEE Transactions on Intelligent Transportation Systems,
vol. 5, no. 4, pp. 347 – 351, Dec. 2004.
[14] M. S. Almalag, “Safety-related vehicular applications,” in Vehicular Networks
From Theory to Practice, S. Olariu and M. C. Weigle, Eds. Chapman &
Hall/CRC, 2009.
[15] Y.-C. Tseng, S.-Y. Ni, Y.-S. Chen, and J.-P. Sheu, “The Broadcast Storm Prob-
lem in a Mobile Ad Hoc Network,” Wireless Network, vol. 8, no. 2/3, pp. 153–
167, Mar. 2002.
[16] S. Biswas, R. Tatchikou, and F. Dion, “Vehicle-to-vehicle wireless communica-
tion protocols for enhancing highway traffic safety,” Communications Magazine,
IEEE, vol. 44, no. 1, pp. 74–82, Jan. 2006.
[17] R. Chen, W.-L. Jin, and A. Regan, “Broadcasting Safety Information in Vehicu-
lar Networks: Issues and Approaches,” IEEE Network, vol. 24, no. 1, pp. 20–25,
2010.
[18] Verizon wireless. [Online]. Available: http://www.verizonwireless.com/
[19] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments
(WAVE) - Resource Manager,” IEEE Std 1609.1-2006, 2006.
[20] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments
(WAVE) - Security Services for Applications and Management Messages,” IEEE
Std 1609.2-2006, 2006.
[21] “IEEE Trial-Use Standard for Wireless Access in Vehicular Environments
(WAVE) - Networking Services,” IEEE Std 1609.3-2007, 2007.

103
[22] D. Jiang and L. Delgrossi, “IEEE 802.11p: Towards an International Standard
for Wireless Access in Vehicular Environments,” in Vehicular Technology Con-
ference, 2008. VTC Spring 2008. IEEE, may 2008, pp. 2036 –2040.
[23] M. Garg and R. K. Shyamasundar, “A Distributed Clustering Framework in
Mobile Ad Hoc Networks,” in International Conference on Wireless Networks,
2004, pp. 32–38.
[24] G. Wolny, “Modified DMAC Clustering Algorithm for VANETs,” in Systems and
Networks Communications, 2008. ICSNC ’08. 3rd International Conference on,
oct. 2008, pp. 268 –273.
[25] X. Hong, K. Xu, and M. Gerla, “Scalable Routing Protocols for Mobile Ad Hoc
Networks,” Network, IEEE, vol. 16, no. 4, pp. 11 –21, jul/aug 2002.
[26] Y. Gunter, B. Wiegel, and H. Grossmann, “Cluster-based Medium Access
Scheme for VANETs,” in Proc. IEEE Intelligent Transportation Systems Con-
ference, Oct. 2007, pp. 343 –348.
[27] M. Jiang, J. Li, and Y. C. Tay, “Cluster based routing protocol(CBRP),” pp. 1
–27, Aug. 1999.
[28] P. Fan, J. G. Haran, J. Dillenburg, and P. C. Nelson, “Cluster-Based Framework
in Vehicular Ad-Hoc Networks,” 2005, pp. 32 – 42.
[29] Z. Rawshdeh and S. Mahmud, “Toward Strongley Connected Clustering Struc-
ture in Vehicular Ad Hoc Networks,” in Proc. of the 70th IEEE Vehicular Tech-
nology Conference (VTC 2009-Fall), Sept. 2009, pp. 1 –5.
[30] G. Venkataraman, S. Emmanuel, and S. Thambipillai, “Size-restricted cluster
formation and cluster maintenance technique for mobile ad hoc networks,” Int.
J. Netw. Manag., vol. 17, no. 2, pp. 171–194, Mar. 2007.
[31] L. Wang and S. Olariu, “Cluster Maintenance in Mobile Ad-hoc Networks,”
Cluster Computing, vol. 8, no. 2-3, pp. 111–118, 2005.
[32] L. Bononi and M. Di Felice, “A Cross Layered MAC and Clustering Scheme
for Efficient Broadcast in VANETs,” in Proc. IEEE Internatonal Conference on
Mobile Adhoc and Sensor Systems, Oct. 2007, pp. 1 – 8.

104
[33] Z. Rawashdeh and S. Mahmud, “Media Access Technique for Cluster-Based Ve-
hicular Ad Hoc Networks,” in Proc. IEEE 68th Vehicular Technology Conference
VTC, Sept. 2008, pp. 1 – 5.
[34] F. Farnoud and S. Valaee, “Repetition-based Broadcast in Vehicular Ad Hoc
Networks in Rician Channel with Capture,” in Proc. the 27th Conference on
Computer Communications (INFOCOM ’08), Apr. 2008, pp. 1 – 6.
[35] B. Hassanabadi, L. Zhang, and S. Valaee, “Index Coded Repetition-Based MAC
in Vehicular Ad-Hoc Networks,” in Proc. of the 6th IEEE Conference on Con-
sumer Communications and Networking Conference, Jan. 2009, pp. 1180–1185.
[36] O. Kayis and T. Acarman, “Clustering Formation for Inter-Vehicle Communi-
cation,” in Proc. IEEE Intelligent Transportation Systems Conference, 2007.
(ITSC ’07), Oct. 2007, pp. 636 – 641.
[37] H. Su and X. Zhang, “Clustering-Based Multichannel MAC Protocols for QoS
Provisionings Over Vehicular Ad Hoc Networks,” IEEE Transactions on Vehic-
ular Technology, vol. 56, no. 6, pp. 3309 – 3323, Nov. 2007.
[38] J. F. Kurose and K. W. Ross, Computer Networking: A Top-Down Approach,
5th ed. USA: Addison-Wesley Publishing Company, 2009.
[39] P. Djukic and P. Mohapatra, “Soft-TDMAC: A software TDMA-based MAC
over commodity 802.11 hardware,” in Proc. of IEEE INFOCOM, Apr. 2009, pp.
1836 – 1844.
[40] C. Suthaputchakun and A. Ganz, “Priority Based Inter-Vehicle Communica-
tion in Vehicular Ad-Hoc Networks using IEEE 802.11e,” in Proc. IEEE 65th
Vehicular Technology Conference, (VTC ’07), Apr. 2007, pp. 2595 – 2599.
[41] D. Jiang, V. Taliwal, A. Meier, W. Holfelder, and R. Herrtwich, “Design of
5.9 GHz DSRC-Based Vehicular Safety Communication,” Wireless Communi-
cations, IEEE, vol. 13, no. 5, pp. 36 – 43, Oct. 2006.
[42] V. Taliwal and D. Jiang, “Mathematical Analysis of IEEE 802.11 Broadcast Per-
formance in a Probabilistic Channel,” DaimlerChrysler Technical Paper, Tech.
Rep., 2005.

105
[43] Y. Bi, K.-H. Liu, L. Cai, X. Shen, and H. Zhao, “A Multi-Channel Token Ring
Protocol for QoS Provisioning in Inter-Vehicle Communications,” IEEE Trans-
actions on Wireless Communications, vol. 8, no. 11, pp. 5621 – 5631, Nov. 2009.
[44] F. Herzel, G. Fischer, and H. Gustat, “An integrated CMOS RF synthesizer for
802.11 a wireless LAN,” IEEE Journal of Solid-State Circuits, vol. 38, no. 10,
pp. 1767–1770, 2003.
[45] NAVTEQs NAVSTREETS Street Data Reference Manual, 3rd ed., Oct. 2009.
[46] W. Holfelde, “Vehicle safety communications in the US,” in ITS World Congress,
London, U.K., 2007.
[47] A. J. Dean and S. N. Brennan, “Terrain-based road vehicle localization on multi-
lane highways,” in Proc. of the 2009 conference on American Control Confer-
ence, ser. ACC’09. IEEE Press, 2009, pp. 707–712.
[48] R. Aufrere, R. Chapuis, and F. Chausse, “A model-driven approach for real-time
road recognition,” Mach. Vis. Appl., vol. 13, no. 2, pp. 95–107, 2001.
[49] M. Bertozzi and A. Broggi, “GOLD: A Parallel Real-Time Stereo Vision Sys-
tem for Generic Obstacle and Lane Detection,” IEEE TRANSACTIONS ON
IMAGE PROCESSING, vol. 7, pp. 62–81, 1998.
[50] T. Oskiper, Z. Zhu, S. Samarasekera, and R. Kumar, “Visual odometry system
using multiple stereo cameras and inertial measurement unit,” in Proc. IEEE
Conference on CVPR07, 2007.
[51] M. Jabbour, P. Bonnifait, and V. Cherfaoui, “Enhanced Local Maps in a GIS for
a Precise Localisation in Urban Areas,” in 9th IEEE Conference on Intelligent
Transportation Systems (ITSC 2006), 2006.
[52] C. D. McGillem and T. S. Rappaport, “A beacon navigation method for au-
tonomous vehicles,” IEEE Transactions on Vehicular Technology, vol. 38, no. 3,
pp. 132–139, 1989.
[53] T. R. Henderson, S. Roy, S. Floyd, and G. F. Riley, “ns-3 project goals,” in
Proc. of from the workshop on ns-2: the IP network simulator, 2006.

106
[54] H. Arbabi and M. C. Weigle, “Highway mobility and vehicular ad-hoc networks
in ns-3,” in Proc. of the 2010 Winter Simulation Conference (WSC), Dec. 2010,
pp. 2991 –3003.
[55] M. Treiber, A. Hennecke, and D. Helbing, “Congested traffic states in empirical
observations and microscopic simulations,” Physical Review E, vol. 62, no. 2,
pp. 1805–1824, Aug. 2000.
[56] A. Kesting, M. Treiber, and D. Helbing, “General Lane-Changing Model MO-
BIL for Car-Following Models,” Transportation Research Record: Journal of the
Transportation Research Board, vol. 1999, pp. 86–94, Dec. 2007.
[57] A. Weimerskirch, J. J. Haas, Y.-C. Hu, and K. P. Laberteaux, “Data Security
in Vehicular Communication Network,” in VANET: vehicular applications and
inter-networking technologies, H. Hartenstein and K. P. Laberteaux, Eds. Wiley
Online Library, 2010.
[58] D. Jiang, Q. Chen, and L. Delgrossi, “Communication Density: A Channel
Load Metric for Vehicular Communications Research,” in Proc. IEEE 4th Inter-
national Conference on Mobile Adhoc and Sensor Systems, (MASS ’07). IEEE,
2007, pp. 1–8.
[59] M. Abuelela and S. Olariu, “Zipper: A Zero-Infrastructure Peer-To-Peer Sys-
tem For VANETs,” in Proc. of the ACM Workshop on Wireless Multimedia
Networking and Performance Modeling (WMuNeP), Sep. 2007, pp. 2–8.
[60] K. Lee, S.-H. Lee, R. Cheung, U. Lee, and M. Gerla, “First Experience with
CarTorrent in a Real Vehicular Ad Hoc Network Testbed,” in Proc. IEEE Mobile
Networking for Vehicular Environments Conference, May 2007, pp. 109 – 114.
[61] C.-L. Liu, C.-Y. Wang, and H.-Y. Wei, “Cross-layer Mobile Chord P2P protocol
design for VANET,” IJAHUC, vol. 6, no. 3, pp. 150–163, 2010.
[62] T. Hossain, Y. Cui, and Y. Xue, “VANETs: Case Study of a Peer-to-peer Video
Conferencing System,” in Proc. of the 6th IEEE Conference on Consumer Com-
munications and Networking Conference, ser. CCNC’09, 2009, pp. 54–55.
[63] S. Ghandeharizade, S. Kapadia, and B. Krishnamachari, “PAVAN: a policy
framework for content availabilty in vehicular ad-hoc networks,” in Proc. of the

107
1st ACM international workshop on Vehicular ad hoc networks, ser. VANET
’04. ACM, 2004, pp. 57–65.

108
VITA
Mohammad Salem Almalag
Department of Computer Science
Old Dominion University
Norfolk, VA 23529
Mohammad Almalag was a top-ranked student in the field of computer science at
the Computer and Information Systems College. He received his Bachelors Degree
in Computer Science from King Saud University in 2000. He was also recognized as
the top-ranked student of the class of 2000. In Spring 2001, he joined the Depart-
ment of Computer Science and Information System at Imam University as a teacher.
In Fall 2002, Mohammad joined the masters program in the Department of Com-
puter Science at Ball State University. He received his Masters Degree in Computer
Science in Fall 2004. Mohammad joined the PhD program in the Department of
Computer Science at Old Dominion University on Fall 2005. On 2008, he started
his research under the supervision of Dr. Michele C. Weigle. Mohammad had been
active in the areas of wireless networks, sensor networks, vehicular networks, MAC
layer protocols, and networks simulation. With interest in MAC layer protocols and
vehicular networks, Mohammad’s PhD focus, including his dissertation, was on de-
veloping a new MAC protocol for vehicular ad-hoc networks. Specifically, his focus
was on improving the non-safety application share of the bandwidth.
Typeset using LATEX.








![Opt-TDMA/DCR: Optimized TDMA Deterministic Collision ......Firstly, we present probabilistic slot reservation approaches. DRAND [11] is a TDMA reservation method which is a distributed](https://img.pdfslide.us/doc/110x75/613ca51a4c23507cb6358460/opt-tdmadcr-optimized-tdma-deterministic-collision-firstly-we-present.jpg)