Embed Size (px)
Citation preview

Taxes vs. Quotasor Taxes vs. Upper Bounds?
Nicholas Brozovic,∗
David L. Sunding, and David Zilberman†
November 2, 2004
Abstract
We compare taxes and quotas where a regulator and a non-strategic firmhave asymmetric information about a pollution-producing activity. In previ-ous studies, optimal quotas are generally assumed to bind with probabilityone. We analyze the conditions under which a quota that bindswith prob-ability less than one is optimal. A quota that may be slack canbe targetedtowards some firms whilst allowing others to operate unconstrained. Failureto consider optimal quotas that may be slack overestimates the advantage oftaxes over quotas, even in situations where the marginal benefit function ismuch steeper than the marginal cost function.
Keywords: Pollution control; Taxes and quotas; Asymmetric informa-tion
JEL classification:D81; H23; L51
∗Corresponding author; University of Illinois at Urbana-Champaign, Department of Agricul-tural and Consumer Economics, 307 Mumford Hall, Urbana, IL 61801; [email protected];tel 217-333 6194; fax 217-333 2312
†Both at University of California at Berkeley, Department ofAgricultural and Resource Eco-nomics, 207 Giannini Hall, Berkeley, CA 94720

1 Introduction
Many pollution problems are characterized by uncertainty on the part of the regu-
lator. This may be because polluting firms have better information than regulators
on their emissions or abatement costs, so that there is asymmetric information.
Alternatively, the damages caused by pollution and the pollution process itself
may be subject to uncertainty. Price instruments and quantity instruments are
commonly used to control pollution. With a price instrumentthe regulator uses a
tax, on pollution or on a suitable proxy, and firms equate the marginal benefits of
their productive activity to this tax. Under a tax with asymmetric information, the
aggregate level of output is uncertain. Conversely, with a quantity instrument and
asymmetric information, the regulator uses a quota to obtain a certain aggregate
level of output; the marginal benefits of productive activity are uncertain.
If the regulator is able to use contingent regulations that differentiate each
type of firm or possible state of nature, first-best taxes and quotas have identical
welfare outcomes. If there is asymmetric information and first-best regulation
is not feasible, the welfare effects of taxes and quotas willvary. An extensive
literature in the tradition of Weitzman [11] considers the choice between taxes
and quotas under asymmetric information (e.g. Roberts and Spence [9]; Laffont
[5]; Malcomson [6]; Nichols [7]; Kolstad [4]; Stavins [10];Hoel and Karp [2]).
These papers assume, implicitly or explicitly, that quantity regulation involves
the dictation of a specific level of activity that is strictlyadhered to. The chosen
quota will thus influence the decisions of the regulated group in all states of na-
ture, and binds with probability one. However, quotas oftenimply an upper bound
on regulated activities, because quota recipients have theoption of not taking full
advantage of their allocation. Hence, the assumption that optimal quotas bind with
probability one is unduly restrictive. Indeed, in practicemost quantity regulations
are implemented as upper bounds: for example, environmental regulators are gen-
1

erally unconcerned if a firm emits less pollution than it is legally entitled to, and
there is no penalty for driving below the speed limit on a highway. Moreover,
if an industry is very heterogeneous in terms of either its productive or polluting
capacities, it is unlikely that firm response to a uniform quota will be identical
in all possible states of nature. This paper analyzes the implications of allowing
regulated groups to treat quotas as upper bounds – that is to say, allowing quotas
to be slack with positive probability.
We are aware of only a few previous studies that consider the possibility that
quotas may not bind with probability one. Hochman and Zilberman [1] compare
the welfare impacts of taxes and quotas using fixed proportions production and
pollution functions. Because of this functional form, firm adjustment to regula-
tion only occurs at the extensive margin, and individual production units cannot
adjust at the intensive margin in response to regulation. Thus, under each kind of
regulation, firms either continue to operate at full capacity, or shut down. Wu and
Babcock [12] consider firm adjustment at both intensive and extensive margins
for the problem of second-best regulation under heterogeneity. Although they do
recognize the possibility that quotas may not bind with probability one, they do
not analyze either the potential optimality or the implications of this. Karp and
Costello [3], using a dynamic model with asymmetric information, show that a
regulator may use a slack quota to gain information with which to better target fu-
ture quotas. However, in their model, the optimal one-period quota still binds with
probability one, and use of a slack quota leads to loss of surplus in that period.
Finally, in a numerical simulation of alternative policiesto mitigate global climate
change, Pizer [8] shows that for realistic cost and benefit parameters, second-best
quotas do not bind in all cases. For the particular application he considers, Pizer
calculates that a failure to account correctly for slack quotas overestimates by a
factor of five the advantage of taxes over quotas, yielding anestimated gain of $10
2

billion in 2010, rather than the correct figure of $2.2 billion.
Our objective is to compare taxes and quotas in a static framework when the
regulator may use a quota that is slack with positive probability. Setting a quota
that may be slack allows targeting of the regulation on a subset of possible firms.
Firms that are targeted in this way will operate closer to thesocial first-best level
of production. Conversely, firms for which the quota is slackwill operate uncon-
strained and will be producing further from the social first-best level. There are
thus two opposite effects from allowing a quota to be slack: firm targeting leads
to an increase in net surplus, whereas unconstrained firm operation leads to a de-
crease in net surplus. In order to allow comparison with existing work, we derive
analytical results using the same assumptions about functional forms as previous
literature. We derive conditions under which an optimal quota may be slack, and
compare taxes and quotas under these conditions. We show that if there is enough
heterogenity in the regulated industry, the optimal quota must be slack with posi-
tive probability. Moreover, our analysis suggests that previous studies have over-
estimated the relative advantage of taxes over quotas. The ability to use a quota
that may be slack means that quotas are preferred to taxes over a wide range of
parameter values where previous studies would indicate theopposite result.
2 The model
We begin by describing the functional forms and informationasymmetry used in
the general model. We then present optimality conditions for second-best regula-
tion with taxes and quotas.
3

2.1 Elements of the model
We assume a representative firm which has a production technology and a pollu-
tion technology. The production technology captures the quasi-rents of a given
level of production activity by the firm. The pollution technology captures the ex-
ternality costs of the firm’s activity. We assume that the production and pollution
technologies are independent attributes of the representative firm.
The regulator has full information about the firm’s pollution technology, but
is uncertain of the firm’s production technology.1 For simplicity, we assume that
there are two possible production technologies, low-productivity (L) and high-
productivity (H). The representative firm is anL-type with probabilityθ and an
H-type with probability1−θ. Our major results hold for continuous distributions
of production technology, but the proofs are more difficult to interpret.
The firm uses a scalar input,xi, in the production of a numeraire good, where
i ∈ {L, H} and denotes whether the firm is anL-type or anH-type. Its quasi-
rents net of input prices are given by the production function fi(xi). Additionally,
we assume thatfi(xi) ≥ 0, f ′i(xi) > 0, f ′′
i (xi) < 0, fi(0) = 0, and thatf ′L(xi) ≤
f ′H(xi) for all positive values ofxi.
Input use by each firm causes a negative externality. The damage caused by
using xi units of input is given by the functiong(xi), where we assume that
g(xi) ≥ (0), g′(xi) > 0, g′′(xi) > 0, and g(0) = 0. We also assume that
f ′L(0) > g′(0), so that it is socially desirable for the firm to continue to oper-
ate at some positive level even if it is a low-productivity type. This assumption
implies that the representative firm will never shut down as aresult of regulation,
and adjustment will take place at the intensive margin only.
The expected net surplus is given by the sum of quasi-rents and damages
1Although it is possible to consider uncertainty by the regulator over both the pollution andproduction technologies, it is well known that if uncertainty in the pollution and production tech-nologies is uncorrelated, then it is sufficient to consider only one source of uncertainty [10] [11].
4

caused by production taken over realizations of the production technology:
Ei [fi(xi) − g(xi)] (1)
In the absence of any regulation, the firm will maximize quasi-rents by us-
ing an input levelxci such thatf ′
i(xci) = 0, so thatxc
L ≤ xcH . This means that
without regulation, if the firm is a high-productivity type,it will on average pro-
duce more pollution than if it is a low-productivity type. Becauseg′′(xi) > 0, a
high-productivity firm will also produce more pollution perunit of input than a
low-productivity firm.
The firm does not internalize the damage caused by its production and net
surplus may be improved by regulation. In a first-best setting, the regulator can
maximize net surplus by using a regulation – either a tax or a quota – that is con-
tingent on the firm’s production technology. Such contingent taxes and quotas will
attain the same surplus level. However, contingent regulation is often impossible
for two reasons. First, the regulator may be unable to ascertain firm type. Second,
even if the regulator has full information, reasons of politics or perceived equity
may prevent the government from using contingent regulation. In many settings
of heterogeneity or uncertainty, the regulator is constrained to use a single, uni-
form, instrument. Under such conditions, the welfare effects of second-best price
and quantity instruments will, in general, differ.
2.2 Optimal second-best regulation
The regulator seeks a uniform policy instrument,M∗, which will maximize net
surplus, defined by
M∗ = arg maxM∈ℜ+
Ei [fi(xi(M)) − g(xi(M))] (2)
5

In equation (2),xi(M) is the input use decision by a firm of productivity type
i facing a policy instrument given byM . The first-order condition corresponding
to equation (2) is
Ei [x′
i(M∗) (f ′
i(xi(M∗)) − g′(xi(M
∗)))] = 0 (3)
The marginal response of ani-type firm to a unit increase in the policy in-
strumentM is given byx′i(M). In this paper, we consider the choice of policy
instrument between a second-best tax and a second-best quota.
2.2.1 Second-best taxes
The regulator may choose to use a uniform tax as the second-best policy instru-
ment. In this case,xi(t) is the input use decision by ani-type firm facing a per-unit
input tax oft. We assume that tax revenues are recycled in a non-distorting fash-
ion and thus net out of equation (2). The marginal response ofan i-type firm to
a unit increase in the tax may then be written asx′i(t). Given a tax oft, the firm
will choose an input use so thatf ′i(xi(t)) = t, equating the value of its marginal
product and the per-unit tax.2 With the second-best tax, high-productivity (H-
type) firms will continue to use more inputs than low productivity (L-type) firms,
so thatxL(t) ≤ xH(t). As before, a firm that isH-type will on average produce
more pollution and more pollution per unit of input than a firmthat isL-type.
2We assume that the second-best tax does not induce the low-productivity firm to shut down.This would occur if the optimal tax were larger than the quasi-rent for the low-productivity firmfor the first unit of production. If this were the case, the regulator could target the tax to the high-productivity firm, and increase net surplus, even though expected production would decrease. Fora qualitative analysis of firm shut down under second-best taxes, see Wu and Babcock [12]. In thereal world, quotas that are slack on some firms are common, butpollution taxes are not generallylarge enough to lead to firm closure. For this reason, in this paper, we assume that second-besttaxes do not lead to shut down.
6

2.2.2 Second-best quotas
Alternatively, the regulator may address the production externality using a quota
on input use. In this case, the input use decision by a firm of productivity type
i facing a quota ofQ may be written asxi(Q), and its change in input-use in
response to a marginal increase in the quota is given byx′i(Q). If the quota binds
with probability one – that is to say, if it binds on both theL-type and theH-type
firm – thenxL(Q) = xH(Q) = Q, x′L(Q) = x′
H(Q) = 1 and first-order condition
(3) simplifies to
Ei [f′
i(Q∗
1)] = g′(Q∗
1) (4)
Equation (4) states that if it is known that the quota will bind with probability
one (denoted by the subscript onQ∗), then the optimal quota equates the expected
benefits for both firm types and the costs of pollution. This isa well-known result
(e.g. Weitzman [11]; Laffont [5]; Stavins [10]).
However, ifL-type andH-type production technologies are different enough,
then the quota may not bind with probability one. In particular, the quota may
bind on anH-type firm, but may be large enough that it does not bind on an
L-type firm. In this case, input use and marginal input use are given by
xH(Q) = Q
x′
H(Q) = 1
xL(Q) =
xcL if f ′
L(Q) ≤ 0
Q if f ′L(Q) > 0
x′
L(Q) =
0 if f ′L(Q) ≤ 0
1 if f ′L(Q) > 0
(5)
7

If the quota does not bind on anL-type firm, it follows that it is operating at
its unconstrained optimum, and increasing the quota further will have no effect on
input use. First-order condition (3) simplifies to
f ′
H(Q∗
θ) = g′(Q∗
θ) (6)
In this case, the regulator ignores the possibility that thefirm is a low-productivity
type entirely, and equates the marginal benefits of production and marginal pollu-
tion damages for the high-productivity firm only – even though with probability
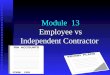
θ, the quota will be slack (denoted by the subscript onQ∗). This possibility is
illustrated using linear marginal production and pollution functions in Figure 1.
What are the advantages to the regulator from setting a quotathat does not bind
with probability one? By specifically targeting the quota atthe high-productivity
firm, there is a probability of1 − θ that there will be no loss of surplus relative to
the first-best contingent regulation. The benefits of such targeting may be larger
than the additional damages caused by allowing a low-productivity firm to operate
unconstrained, with probabilityθ.
The literature comparing taxes and quotas under conditionsof asymmetric
information is extremely large. However, in ranking second-best taxes and quotas,
existing analyses assume that quotas bind with probabilityone (corresponding to
equation (4) above) and ignore the possibility that an optimal quota need not bind
in all states of nature (corresponding to (5) and (6)). As will be shown below, the
assumption that quotas are never slack underestimates the efficiency of second-
best quotas in comparison to second-best taxes.
Moreover, for a set of production functionsfi(·) and a pollution functiong(·),
it is possible that there exist solutionsQ∗1 andQ∗
θ that are admissible solutions to
first-order conditions (4) and (6) respectively. In this case the net surplus function
has two local maxima. However, the assumption of only two production tech-
8

nologies allows the support of the net surplus function to bepartitioned into two
sets. Each portion of the net surplus function then containsa unique, well-behaved
maximum. If multiple local maxima exist, the choice of a global maximum will
depend on the functional forms of the production and damage functions. Simi-
larly, if production technologies are continuous rather than discrete, multiple local
maxima may still exist that satisfy the relevant first-orderconditions.3 We limit
our analysis to a two-part discrete distribution: with continuous distributions, the
general results still hold, but analytical solutions are intractable.
3 Analytical example
The model shows that a regulator can theoretically choose anoptimal quota that
does not bind with probability one. However, in order for this result to have
practical implications, two things need to be demonstrated. First, there must be
a significant range of relevant conditions under which the optimal quota does not
bind in all states of nature. Second, consideration of such quotas must alter the
choice between taxes and quotas under at least some of these conditions.
Without specific functional forms, analytical comparisonsof second-best taxes
and quotas are not possible. We illustrate the basic resultsof the model using the
same assumptions about functional forms as Weitzman [11], namely that quadratic
approximations to the production and damage functions are adequate. Thus, the
production and damage functions have the following forms:
fi(x) ≈ f ′
i(x)x +f ′′
i (x)
2x2
3A necessary, but not sufficient, condition for the existenceof multiple solutions for the choiceof second-best quota is that as the quota increases, the expected marginal product for the subsetof firm types for which the quota binds increases over some interval. Discrete distributions withmore than two possible values may thus have more than two solutions.
9

g(x) ≈ g′(x)x +g′′(x)
2x2 (7)
By following Weitzman’s functional forms, the effect of allowing quotas to be
slack can be compared directly with the results of previous work. Additionally, as
in Weitzman’s study, we assume thatf ′′L(x) = f ′′
H(x) = f ′′ and thatg′′(x) = g′′.
These assumptions imply that the marginal production functions for each firm
type have the same slope.4 It also follows that a firm of typei will have a constant
response to a marginal increase in the per unit tax, so thatx′i(t) = 1/f ′′. Hence,
equation (3) can be simplified tot∗ = Ei [g′(xi(t
∗))], which is the optimal uniform
tax.
3.1 Conditions under which the optimal quota may not bind
With these assumptions about the functional forms of the production and damage
functions, it is possible to obtain analytical expressionsfor the conditions under
which the optimal quota may be slack, or there exist two choices for an optimal
quota. In order to simplify interpretation of the analytical results, we introduce
several further parameters. First, recall that the input use Q∗1 corresponds to the
quota chosen by the regulator if it is assumed that the optimal quota will always
bind with probability one. Note that the input useQ∗1 is defined even if it is
not an admissible solution to first-order condition (4). Figure 1 illustrates this
possibility. The input useQ∗1 forms a convenient baseline for comparison. Define
the parameterγ1 = f ′H(Q∗
1) − f ′L(Q∗
1), so thatγ1 > 0 and is the difference in
marginal products between anH-type and anL-type firm.
Recalling that the probabilities of the firm being low-productivity and high-
productivity areθ and 1 − θ respectively, the variance off ′i(Q
∗1) is defined as
4Relaxing this assumption adds significantly to the complexity of the problem, and has beenanalyzed by Malcomson [6].
10

σ2 = Ei [f′i(Q
∗1)
2] − (Ei [f′i(Q
∗1)])
2 = θ(1 − θ)γ21 . The productθ(1 − θ) is a
measure of the skewness of the distribution of production technologies. It attains
a maximum value when there is an equal probability that the firm is either type.
The parameterγ2 is the difference in marginal products between the two pos-
sible types of firm divided by the marginal product of a high productivity firm and
is defined asγ2 = γ1/f′H(Q∗
1). Note that the parametersγ1 andγ2 are defined
even when the quotaQ∗1 may not be an admissible solution to (4). A value of
γ2 < 1 implies that at the quotaQ∗1, a low productivity firm will have a positive
marginal product. A value ofγ2 > 1 implies thatQ∗1 > xc
L, so that at a hypo-
thetical production level ofQ∗1, the low productivity firm would have a negative
marginal product. Note also that there is a maximum value ofγ2 that is possi-
ble for the problem of interest. By a geometric argument, it is impossible forγ2
to take a value greater than1/θ as this is not consistent with a marginal damage
function that has a positive value atQ∗1.
Finally, the parameterβ is defined as the ratio of the elasticity of the expected
marginal productivity with respect to input use to the elasticity of marginal pollu-
tion damage with respect to input use. Thus, noting that by definition Ei [f′i(Q
∗1)] =
g′(Q∗1), β is given by the expressionβ = − (Q∗
1 · f′′/Ei [f
′i(Q
∗1)]) / (Q∗
1 · g′′/g′(Q∗
1)) =
−f ′′/g′′, which is the negative of the ratio of the slope of the marginal product to
the slope of the marginal pollution damage. The parameterβ is always positive,
and it captures the relative trade-off between increased production and increased
pollution as input use increases. For the functional forms used, a value ofβ of
more (less) than one implies that the marginal production function is steeper (shal-
lower) than the marginal damage function.
These parameters can be used to determine the conditions under which an
optimal quota that is slack with positive probability exists:
Lemma 1 A quota that binds with probability 1 is an admissible solution to first-
11

order condition (4) ifγ2 ≤ 1.
Lemma 2 A quota that binds with probability(1−θ) is an admissible solution to
first-order condition (6) ifγ2 ≥1+β
1+(1+θ)β.
Note that because 1+β
1+(1+θ)β< 1, Lemmas 1 and 2 imply that it if 1+β
1+(1+θ)β≤
γ2 < 1, there will be two different quotas that are potential solutions to problem
(2). Conditions under which is one preferred to the other will be analyzed below.
3.2 Ranking of second-best policies
It is not sufficient to show that an optimal quota may be slack in some states of
nature. We must also demonstrate that a failure to consider such a possibility can
lead to incorrect rankings of second-best policy instruments. Define the net sur-
plus under a second-best tax aswt, that under a second-best quota that binds with
probability one aswq1, and that under a second-best quota that is slack with prob-
ability θ aswqθ. In Weitzman’s original analysis – with quotas assumed to bind
with probability one – the choice between a second-best tax and a second-best
quota simplified to a comparison of the steepness of the marginal production and
marginal damage functions. We begin our analysis by briefly rederiving Weitz-
man’s result using our notation. The difference in net surplus between a uniform
tax and quota that binds with probability one is given by
wt −wq1 = θ
∫ Q∗
1
xL(t∗)(f ′
L(z) − g′(z)) dz + (1− θ)∫ xH(t∗)
Q∗
1
(f ′
H(z) − g′(z)) dz (8)
The first and second terms on the right-hand side of equation (8) give the ex-
pected advantage of a tax over a quota for theL- andH-type firms, respectively.
Under our assumption of quadratic production and damage functions, the differ-
ence in net surplus is given by
12

wt − wq1 =
σ2(f ′′2 − g′′2)
−2f ′′2(f ′′ − g′′)=
σ2(β2 − 1)
−2β2(f ′′ − g′′)(9)
This is equivalent to the well-known expression derived by Weitzman [11]
that states the comparative advantage of a tax over a quota interms of the relative
slopes of the marginal production and damage functions. Equation (9) implies that
if the parameterβ is greater than one, then a tax will yield a higher net surplusthan
a quota that binds with probability one. This is equivalent to the statement that the
marginal production function is steeper than the marginal damage function.
Lemma 3 For quadratic production and damage functions, a uniform tax is a
mean-preserving spread of input use relative to a uniform quota that binds with
probability one, so thatxL(t∗) < Q∗1 < xH(t∗).
Becausef ′′ < 0 andg′′ > 0, Jensen’s inequality and Lemma 3 imply that a
uniform tax has higher expected output levels and higher expected damages than a
uniform quota ofQ∗1. An intuitive explanation for the relative slope criterionthen
follows easily from Lemma 3: if the tax is a mean-preserving spread of input use
relative to the binding quota, and the marginal production function is steeper than
the marginal damage function, then the gains from increasedproduction under a
tax relative to a quota are greater than the increased damages.
If it is assumed thatγ2 > (1 + β)/ (1 + (1 + θ)β), so that an admissible
solution to first order condition (6),Q∗θ, exists, then the difference in net surplus
between a tax and a quota that binds with probability less than one is given by
wt−wqθ = θ
∫ xc
L
xL(t∗)(f ′
L(z) − g′(z)) dz+(1−θ)∫ xH(t∗)
Q∗
θ
(f ′
H(z) − g′(z)) dz (10)
The first term on the right hand side of equation (10) is the difference in net
13

surplus between a tax and unconstrained operation for low productivity firms un-
der the quotaQ∗θ. This term may be positive or negative, as the gains from in-
creasing aggregate output for a low productivity firm may be more or less than the
concurrent increase in aggregate pollution. The second term on the right hand side
of equation (10) is the difference in surplus between the taxand quota for the sub-
set of high productivity firms. Because the quotaQ∗θ is targeted specifically to the
high productivity firm, this term is always negative. As shown in the Appendix,
equation (10) may be rewritten as
wt − wqθ =
σ2((1 − θ)β2 − 1 + ∆)
−2β2(f ′′ − g′′)(11)
In (11) the parameter∆ ≡ 1−γ2
γ22
(1 + β)(
1−γ2
1−θ(1 + β) + 2γ2β
)
. Finally, for
the case where bothQ∗1 andQ∗
θ are admissible solutions for the optimal quota (i.e.
1+β
1+(1+θ)β≤ γ2 < 1), the difference in net surplus between these two quotas is
simply the difference between expressions (8) and (10):
wq1 − wq
θ =∫ xc
L
Q∗
1
Ei [f′
i(z) − g′(z)] dz + (1 − θ)∫ Q∗
θ
xc
L
(f ′
H(z) − g′(z)) dz (12)
The first term on the right hand side of equation (12) is alwaysnegative and
represents the loss in surplus from allowing the unconstrained operation of a low
productivity firm and higher input use (calculated over the range fromQ∗1 to xc
L)
for a high productivity firm. The second term on the right handside of equation
(12) is positive and represents the expected gains from targeting a quota just on a
high productivity firm. From expressions (9) and (11), we obtain:
wq1 − wq
θ = (wt − wqθ) − (wt − wq
1) =σ2(∆ − θβ2)
−2β2(f ′′ − g′′)(13)
Becauseσ2/(−2β2(f ′′ − g′′)) > 0, the ranking of each policy instrument can
14

be determined by looking at the term of the numerator in parentheses in (9), (11),
and (13). Table 1 summarizes the results for ranking of second-best taxes and quo-
tas by net surplus. The expressions for ranking the net surplus of taxes and quotas
shown in Table 1 are more complex than Weitzman’s original relative slopes crite-
rion, even though the functional forms used in this analysisare identical. With the
exception of the ranking of a tax and a quota when the quota binds with probabil-
ity one, comparisons do not lead to clear intuition. In situations where an optimal
quota may be slack, or there are two possible quotas, a simplerule to rank the
different policies is not apparent. However, qualitative relationships between the
surplus rankings can be determined by graphing the relevantanalytical expres-
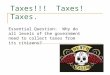
sions. The panels of Figure 2 show the optimal choice of second-best policy for
different values ofθ in the parameter space{β, γ2}. We have chosen values ofθ
of 0.25, 0.5, and 0.75 to represent situations where the firm is more likely to be
anL-type, equally likely to beL- andH-type, and more likely to be anH-type,
respectively. Note that the horizontal axis of each panel uses a logarithmic scale;
in the middle of each panel(log β) = 0, corresponding toβ = 1, so that the
marginal product and marginal damage functions are equallysteep. The lower
range of the horizontal axis, -1, corresponds to a marginal damage function that
is ten times steeper than the marginal product function. Similarly, the upper range
of the horizontal axis, -1, corresponds to a marginal product function that is ten
times steeper than the marginal damage function. Note also that the vertical axis
on each panel is different, showing the range of feasible values ofγ2, given by
(0, 1/θ), for each value ofθ used.
Four qualitative results emerge from Figure 2. Although it is beyond the scope
of this paper to prove these results analytically, we can provide some intuition for
them. The results are:
Result (i)As the degree of heterogeneity increases, quotas that are slack with
15

positive probability become the preferred instrument.
Result (ii)As the probability that the firm is a high productivity type increases,
the parameter space over which slack quotas are stable, and preferred, increases.
Result (iii) For any feasible pair of values of{β, γ2}, quotas that are slack
with positive probability perform better as the probability that the firm is a low
productivity type increases.
Result (iv)Quotas that are slack with positive probability perform better when
the slopes of the marginal product and marginal damage functions are similar.
Result (i) is fairly straightforward to explain. As the difference betweenL-
type andH-type production functions increases, the distance between Q∗1 andQ∗
θ
also increases (see Figure 1). As a result, the gains from targeting regulation to
theH-type firm will also increase. Similarly, asγ2 increases, the losses in surplus
from using a second-best tax relative to a first-best solution also increase, so that
the advantage of targeting the quota increases. There are two further observations
to note from result (i). First, quotas that are slack with positive probability may be
optimal even whenγ2 < 1, when there are two admissible choices for the optimal
quota. Second, forγ2 > 1, quotas are preferred to taxes over a very wide range of
the parameter space of{β, γ2}. In particular, Figure 2 suggests that if an optimal
quota exists that binds with probability less than one, it may achieve a higher net
surplus than a tax even when the marginal product function ismuch steeper than
the marginal damage function. This result is significantly different to the original
relative slopes criterion, and somewhat counterintuitive. It is generally assumed
that if the marginal production function is relatively shallow, then a uniform tax is
a good approximation to the damage function and thus minimizes surplus losses
relative to first-best regulation (Roberts and Spence [9] develop this intuition in a
clear fashion). However, our analysis shows that even though this is the case, a
higher net surplus may be achieved by using a quota, if the expected gains from
16

targeting high productivity firms exceed the expected losses from unconstrained
operation of low-productivity firms.
Result (ii) follows directly from the geometry of the regulation problem (Fig-
ure 1). All else equal, asθ decreases, it is more likely that a quota that is slack
exists, and that targeting such a quota to high productivityfirms will be optimal.
Result (ii) is a consequence of Lemma 1.
Result (iii) may appear to contradict result (ii). It statesthat all else equal, quo-
tas that may be slack are preferred for lower values ofγ2 asθ increases. However,
there is an intuitive explanation for this result. A high productivity firm will be
penalized more, in terms of level of productive activity, when the probability that
the firm is low productivity increases. Hence, once again, the gains from targeting
high-productivity firms may outweigh the losses from allowing low-productivity
firms to operate unconstrained.
Finally, result (iv) may be explained in terms of the trade-off between two
effects. When the marginal damage function is much steeper than the marginal
production function, the losses from allowing the low-productivity firm to operate
unconstrained are large. Conversely, when the marginal production function is
much steeper than the marginal damage function, the potential gains from target-
ing the high-productivity firm are small. These two effects mean that slack quotas
are most effective when the marginal production and marginal damage functions
are of similar steepness. This result is also quite different to the original relative
slopes criterion, which states that when marginal production and marginal damage
functions are of the same steepness, taxes and quotas perform equally well.
17

4 Conclusion
The problem of choosing between taxes and quotas when there is asymmetric in-
formation between polluting firms and the regulator has beenextensively studied.
This literature implicitly assumes that the optimal quota will bind with probability
one. With the additional assumptions that production and damage functions are
quadratic and uncertainty additive, the choice between a second-best tax and a
second-best quota depends only on the relative steepness ofthe marginal produc-
tion and marginal damage functions.
In the real world, it is unrealistic to assume that any quota will bind with prob-
ability one. Many quotas are implemented as upper bounds: the regulated firm
may not exceed a given level of production or pollution, but there is no penalty
for overcompliance. Thus, quotas may be slack for some firms and in some states
of nature.
We extended the existing literature on the choice between taxes and quotas by
developing and analyzing the conditions under which it is optimal for a regulator
to set a quota that is slack with positive probability. When feasible, slack quotas
entail an additional trade-off for the regulator. The regulator can target the quota
towards higher productivity firms or states of nature, whichreduces the surplus
loss relative to the first-best solution. However, in doing so, the regulator also
allows firms which are less productive to operate unconstrained, increasing the
surplus loss relative to the first-best.
We provided an analytical example using quadratic production and damage
functions, and characterized the relationship between parameters that determine
the advantage of taxes or quotas. Our analysis showed that when slack quotas are
feasible, the heterogeneity of firms and the distribution ofuncertainty, as well as
the steepness of marginal production and damage functions,must be considered
when determining the ranking of taxes and quotas. In particular, we showed that
18

when there is significant heterogeneity, the only feasible quota will be slack, and
it will dominate a tax even when the marginal production function is much steeper
than the marginal benefit function – conditions under which previous studies pre-
dicted that taxes would strongly dominate quotas.
Our model has several limitations. We assume that optimal price regulation
does not cause the firm to shut down if it is a low-productivitytype. The possi-
bility that the low-productivity firm shuts down provides anadvantage for taxes
that is analogous to the potential advantage of slack quotas. Quotas that bind
with probability one are inefficient because they do not allow input use to vary
as a function of differences in production technology. Quotas that may be slack
can reduce this inefficiency by allowing input use to vary between low- and high-
productivity firms. Conversely, taxes are inefficient because they allow input use
to vary too much as a function of production technology. If the low-productivity
firm shuts down, this inefficiency can be reduced by targetingthe tax to the high-
productivity firm. Intuitively, shut down is much less likely to be a possibility
when the marginal production function is much steeper than the marginal dam-
age function. Thus, our result that quotas may be preferred to taxes even when
the marginal production function is much steeper than the marginal damage func-
tion is unlikely to be changed by extending this paper to allow firm shut down.
However, it is possible that when shut down is an admissible solution, taxes may
dominate quotas in some regions of the parameter space of{β, γ2} where the
marginal production function is shallower than the marginal damage function.
Finally, we use a binary discrete distribution to representthe regulator’s un-
certainty. In the real world, investment in alternative abatement technologies is
often lumpy, and a discrete distribution captures this lumpiness well. A discrete
distribution also allows analytical solutions for the ranking of alternative policies
and provides clear graphical intuition. Under more complicated discrete or con-
19

tinuous distributions, the major results would still hold,but characterization of the
optimal solution would be much more complex.
5 Appendix: Technical details
In this section we derive (1) conditions under which a slack quota is an admissible
solution to the quantity regulation problem, and (2) expressions for the net surplus
differences between taxes and quotas.
5.1 Existence of slack quotas
For a quota that does not bind with probability one to be an admissible solution
to first-order condition (6),Q∗θ ≥ xc
L. Equivalently, the distance fromQ∗θ to Q∗
1
should be greater than the distance fromxcL to Q∗
1. This corresponds to the condi-
tion
−θγ1
f ′′ − g′′≥ −
f ′L(Q∗
1)
f ′′(14)
Rearranging terms and noting thatγ1 = γ2f′H(Q∗
1) and thatγ2 = 1−f ′L(Q∗
1)/f′H(Q∗
1)
gives
γ2
(
1 +f ′′ − g′′
f ′′θ
)
≥f ′′ − g′′
f ′′θ(15)
Lemma 2 follows directly from this. Similarly, ifγ2 > 1, thenQ∗1 > xc
L,
implying that the low productivity firm would have a negativemarginal product.
20

This can not be an optimal solution, and so ifγ2 > 1, the optimal quota must be
slack with positive probability.
5.2 Difference in surplus between a tax and a quota
Following the functional forms in (7), and equation (8), thedifference in net sur-
plus between a tax and a quota that binds with probability oneis
wt − wq1 =
θ ((1 − θ)2γ21f
′′2 − (1 − θ)2γ21g
′′2) + (1 − θ) (θ2γ21f
′′2 − θ2γ21g
′′2)
−2f ′′2(f ′′ − g′′)
(16)
Recalling thatσ2 ≡ θ(1 − θ)γ21 , this expression simplifies to give (9). Sim-
ilarly, the difference in net surplus between a tax and a quota that binds with
probability less than one follows from (10), and is
wt−wqθ =
θ(
((1 − θ)γ1f′′ + f ′
L(Q∗1)(f
′′ − g′′))2 − (1 − θ)2γ21g
′′2)
− (1 − θ)θ2γ21g
′′2
−2f ′′2(f ′′ − g′′)
(17)
Expanding the quadratic term, rearranging, and noting thatf ′L(Q∗
1) = (1 −
γ2)/f′H(Q∗
1) and thatf ′H(Q∗
1) = γ1/γ2 allows this expression to be rewritten as:
wt − wqθ =
σ2(
(f ′′2 − g′′2) − θf ′′2 + 1−γ2
γ22
(f ′′ − g′′)(
1−γ2
1−θ(f ′′ − g′′) + 2γ2f
′′))
−2f ′′2(f ′′ − g′′)
(18)
Equation (11) follows directly from (18). Finally, the welfare difference be-
tween the two possible quotas,Q∗1 andQ∗
θ, assuming that both are feasible, is
given by:
21

wq1 − wq
θ =f ′2
L (Q∗1)(f
′′ − g′′)2 − (1 − θ) (θγ1f′′ − f ′
L(Q∗1)(f
′′ − g′′))2
−2f ′′2(f ′′ − g′′)(19)
Which is equivalent to subtracting (16) from (17). Consequently, (19) may be
rewritten as:
wq1 − wq
θ =σ2(
1−γ2
γ22
(f ′′ − g′′)(
1−γ2
1−θ(f ′′ − g′′) + 2γ2f
′′)
− θf ′′2)
−2f ′′2(f ′′ − g′′)(20)
Equation (13) follows directly from this.
22

References
[1] Hochman, E., and Zilberman, D. (1978), Examination of environmental poli-
cies using production and pollution microparameter distributions,Econo-
metrica, 46, 739-760.
[2] Hoel, M., and Karp, L. S. (2001), Taxes and quotas for a stock pollutant with
multiplicative uncertainty,Journal of Public Economics, 82, 91-114.
[3] Karp, L. S., and Costello, C. (2004), Dynamic taxes and quotas with learn-
ing, Journal of Economic Dynamics and Control, 28, 1661-1680.
[4] Kolstad, C. D. (1986), Empirical properties of economicincentives and
command-and-control regulations for air pollution control, Land Economics,
62, 250-268.
[5] Laffont, J. J. (1977), More on prices vs. quantities,Review of Economic
Studies, 44, 177-182.
[6] Malcomson, J. M. (1978), Prices vs. quantities: a critical note on the use of
approximations,Review of Economic Studies, 45, 203-210.
[7] Nichols, A. L. (1984),Targeting economic incentives for environmental pro-
tection(Cambridge: MIT Press).
[8] Pizer, W. A. (2002), Combining price and quantity controls to mitigate
global climate change,Journal of Public Economics, 85, 409-434.
[9] Roberts, M. J., and Spence, M. (1976), Effluent charges and licenses under
uncertainty,Journal of Public Economics, 5, 193-208.
[10] Stavins, R. N. (1996), Correlated uncertainty and policy instrument choice,
Journal of Environmental Economics and Management, 30, 218-232.
[11] Weitzman, M. L. (1974), Prices vs. quantities,Review of Economic Studies,
41, 477-491.
23

[12] Wu, J., and Babcock, B. A. (2001), Spatial heterogeneity and the choice
of instruments to control nonpoint pollution,Environmental and Resource
Economics, 18, 173-192.
24

Range ofγ2 Ranking of difference in net surplus
(0, 1] sign(wt − wq1) = sign(β2 − 1)
[
1+β
1+(1+θ)β, 1
θ
)
sign(wt − wqθ) = sign((1 − θ)β2 − 1 + ∆)
[
1+β
1+(1+θ)β, 1]
sign(wq1 − wq
θ) = sign(∆ − θβ2)
Table 1. Ranking second-best taxes and quotas.
25

-
6
x
$/x
g′(x)
f ′H(x)
f ′L(x)
Ei[f′i(x)]
xcL xc
HQ∗1 Q∗
θ
t∗
�����
@@@@@@@@@@@@@@@@@@
@@@@@@@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
Figure 1. Choice of quotas when the optimal quota may be slack.
26

log β
γ 2θ = 0.25
Taxes preferredQuotas preferredBind with probability 1
Quotas preferredSlack with probability θ
A
−1 −0.5 0 0.5 1
0.5
1
1.5
2
2.5
3
3.5
4
log β
γ 2
θ = 0.5
Taxes preferredQuotas preferred
Bind with probability 1
Quotas preferred
Slack with probability θ
B
−1 −0.5 0 0.5 1
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Figures 2A and B. The choice between second-best taxes and quotas whenθ =0.25 (Panel A) andθ = 0.5 (Panel B).
27

log β
γ 2
θ = 0.75
Taxes preferredQuotas preferredBind with probability 1
Quotas preferredSlack with probability θ
C
−1 −0.5 0 0.5 1
0.2
0.4
0.6
0.8
1
1.2
Figure 2C. The choice between second-best taxes and quotas whenθ = 0.75.
28