Embed Size (px)
Citation preview

Target Operation and Status Report
Chris Booth for Target Team13th January 2009
Outline• Current target performance• Investigation of demonstrator failure• New mechanical design• Control & monitoring issues• Particle production vs. beam loss

Chris Booth University of Sheffield 2
Current ISIS Target• Target operation in ISIS for beam-line studies; >190K
pulses by end December.• Actuation & control have operated flawlessly – no target
drops.• Software (DAQ & monitoring) run well, allows remote
monitoring.• System operated by non-experts.• Target behaviour stable and reproducible.• 29th November – target accidentally parked in beam
– Interlock added to prevent parking with frame lowered
• 20th December – target stopped actuating– Apparent mechanical failure.– No dust visible on inspection plate.– Removed 10th January for examination. Awaiting news.– (Any connection with previous incident?)

Chris Booth University of Sheffield 3
Possible Demonstrator failure causes• Misalignment of bearings and shaft. (*)• Partial demagnetisation of permanent magnets
causing non-axial forces. (*)• Distortion of coils causing non-axial forces.• Dynamic distortion of shaft.• Poorer quality DLC coatings on shaft and/or
bearings.(*) Already eliminated at last CM.
Above are addressed in the following slides. Several experts from RAL, Sheffield Materials and outside companies (as well as MICE) have been consulted and provided valuable expertise.

Chris Booth University of Sheffield 4
Stator Field Measurements & ModellingField measured (for DC current) by Craig MacWaters & Paul
Smith. FEA modelling by Paul. See following slides.• Small azimuthal variation seen.• Equivalent to coil offsets ≤ 0.2 mm.• This is also ~ the precision of the position reproducibility.• Upper limit on coil misplacements is therefore 0.2 mm.• Further FEA in progress to determine how this maps onto
transverse force on the shuttle magnets.

Stator field measurements• B Field measured for every 0.2mm axially over a distance of 120mm.
Repeated at 30 deg increments.

FEA Modelling
Repeated for AC Data – Similar Match

Chris Booth University of Sheffield 7
Dynamic distortion of shaft
Distortion of shaft ?
• Stephanie Yang/Wing Lau modelled behaviour under acceleration.
• ~30 Hz mode found (c.f. 30 ms acceleration period in operation.
• High speed camera data also shows “wagging” motion at similar frequency.
• (No evidence from camera that Sheffield shock-absorbing mounting is significant.)

Chris Booth University of Sheffield 8
Dynamic distortion of shaft
Distortion of shaft ?
• Stephanie Yang/Wing Lau modelled behaviour under acceleration.
• ~30 Hz mode found (c.f. 30 ms acceleration period in operation.
• High speed camera data also shows “wagging” motion at similar frequency.
• (No evidence from camera that Sheffield shock-absorbing mounting is significant.)

Chris Booth University of Sheffield 9
Surface coating problemsPoor Diamond-Like Carbon (DLC) coatings ?• Sheffield & RAL team visited coating company (TecVac),
who had examined failed parts. • Likelihood of adhesive failure due to presence of cleaning
or polishing materials, or oxidation due to wire erosion of bearings.
• Sharp edges give electropotential leading to uneven coatings.
• Surface quality pre-coating was also probably inadequate. (Recommend 0.1 to 0.02 Ra compared with current 1.6 Ra.)
• Adequate surface finish difficult to achieve with present machined cruciform shaft.

Chris Booth University of Sheffield 10
New Mechanical Design• Jason Tarrant producing revised mechanical design.
– Discussed at weekly target phone meetings.– Details in Target Parallel this afternoon – only summary here.– Huge amount of work summarised in one slide!
• More rigid stator assembly.• New flanges with bearings machined in situ.
– Improved alignment, reduced tolerances.
• Radically different shaft design to improve rigidity, ease of construction, surface finish.
– Tubular lower section (not cruciform)– ~ same mass/length as at present– Flat on upper cylindrical section, with anti-rotation piece on
bearing.
• Shorter shaft by reducing flange; revised bearing positions.

Chris Booth University of Sheffield 11
Revised stator body

Upper Bearing Design Alternative bearing design
Wedge & dowel for full x,y,z location of clamp
Anti rotationFeature (roundedor flat bearing faceoptions)
Single piecemain body
Wire cut fromsingle piece foraccurate wedge fit
Full bearing merges into section for anti-rotation
M/C with blockin place toprevent toolwander
Clearance for vane(potential risk if adding vane later otherwise simpler bearing)

Chris Booth University of Sheffield 13
Conclusions of Target Workshop last week• Timescale very tight.• Drawing up documents for review.• Key materials (Ti tube) should be ordered now.• Baseline target is continued 6 mm tube
– Other geometries/materials may have particle production advantages
– Must not delay installation of next target
• Baseline coating is DLC– Other coatings (HIPIMS, WS2, WS2 over DLC) may have
advantages.– Investigation will be left for subsequent targets.
• Informally, ISIS representatives are happy with design.• Must have two drives ready for Demonstrator and
installation in ISIS during April shutdown.

Chris Booth University of Sheffield 14
Control Electronics Upgrade• Present system stable, reliable but “expert” system,
unfriendly to normal users!• PIC processors at computational and I/O limits.• Complete redesign planned with improved interfaces, PC
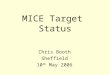
configuration & control, flexibility, enhanced feedback, …• FPGA-based system using USBDAQ board proposed.• James Leaver (IC, FPGA experience) and Paul Smith
(present target control designer) working together.• 5 crates of electronics may come down to single FPGA
plus few daughter cards (for A to D etc)!• Requested input from MICE community over desired
functionality.• Major project – expected to take ~12 months.• See talk this afternoon!

21/04/23 Imperial College 15
USBDAQ
USB Mini-B
1.2V Regulator
2.5/3.3V Regulator
Cypress SX2 USB Interface
Differential / Single Ended
User IO
Single Ended
User IO
1M Gate Spartan 3
FPGA
4Mb PROM

Chris Booth University of Sheffield 16
DAQ & Monitoring• Change to new DAQ card has led to driver problems.
– Currently converting digital position to analogue! Unsatisfactory.
• DAQ code (James Leaver) – dumps data to individual pulse files.
• Target depth, beam intensity, bam losses (various), [frame status] recorded
– Wish to include beam position, external delay
• Various monitoring codes (inc. EPICS based – see Pierrick’s talk this afternoon).
• Hardware & control upgrades will imply DAQ, monitoring & control software redesigns.
• Again, input & feedback requested from the community.• For more details, see talk this afternoon!

Chris Booth University of Sheffield 17
Beam-loss & Particle Production• Adam Dobbs – ORBIT simulation of target & ISIS
– Different target geometries & orientations.– Present orientation – losses mainly near target– 90 rotation – losses near injection (see plots)– Other angles, geometries considered.
• Marco Apollonio – G4Beamline simulation of collection– Pion acceptance into Q1 largely unaffected by target shape or
orientation.– Aluminium, Carbon, Beryllium also considered.– Detailed study required to optimise collected pion to beam
loss ratio.– But must also consider mechanical and thermal properties!
Aluminium could melt!
• For more details, see talk in beam-line session.

Chris Booth University of Sheffield 18
Present orientation
90 rotated