Embed Size (px)
Citation preview

TAO, ZHENG, XIAO, YANG AND YANG PREPARED FOR SUBMISSION TO WUWNET 08 1
Time-Domain Receiver Design for Single Carrier MIMO
Underwater Acoustic Communications
Jun Tao†, Yahong Rosa Zheng§, Chengshan Xiao§, T. C. Yang‡ and Wen-Bin Yang∗
†Dept. of Elect. & Comput. Eng., University of Missouri, Columbia, MO 65211§Dept. of Electrical & Computer Eng., Missouri University of Science & Technology, Rolla, MO 65409
‡Naval Research Laboratory, Washington, DC 20375∗National Institute of Standards and Technology, Gaithersburg, MD 20899, USA
I. Motivation
Underwater acoustic channel makes high data rate transmission a very challenging task, due to the extendedmultipaths delay spread and large Doppler spread [1]-[2]. To increase the data rate or spectral efficiency of underwateracoustic communication, people resort to the spatial structure of the oceans by employing multiple-input, multiple-output (MIMO) technology. With MIMO technology, very high data rates and spectral efficiencies, which can not beobtained by single transmitter systems, can be achieved.
In [3], [4], time-domain receiver design for MIMO underwater acoustic communications was investigated. In thisscheme, the canonical MIMO decision feedback equalization (DFE) is jointly optimized with a second-order phase-lockedloop (PLL), to perform equalization and phase synchronization. This scheme was successfully tested by underwaterexperiment with multi-band (six bands) transmission at data symbol period of 0.5 milliseconds (ms) for each band.However, the system requires careful placement and tuning of the equalizer taps and PLL coefficients, which mayaffect its stability and robustness in different channel conditions. In [5], [6], frequency-domain MIMO receiver designshave been proposed for orthogonal frequency division multiplexing (OFDM) and single-carrier systems with successfulunderwater experimental results.
In this paper, we propose a new time-domain receiver structure, in which the equalization and phase correction aredecoupled. This new structure is robust to channel conditions, and is tested by an undersea experiment with symbolperiod of 0.1 ms.
II. Our Approach
The proposed time-domain single carrier MIMO receiver scheme partitions the received packet into blocks forprocessing. It employs small training blocks from all N transducers to estimate the initial MIMO channel impulseresponse (CIR), and uses the estimated MIMO channel to equalize the first data block of size Nb. The equalizedsymbols are phase-corrected by the group-wise phase estimation and compensation algorithm, and then detected. Totrack the temporal variation of channel, the Nb newly detected symbols are combined with K−1 previous blocks ofdetected symbols (or pilots) to re-estimate the channel. The parameter K is selected so that the time duration of K
blocks doesn’t exceed the channel coherence time. With the updated channel, the next Nb new symbols are equalizedand detected in a similar way mentioned above. The channel re-estimation and detection procedure continues until thewhole packet is processed. The time-domain MIMO equalizer is designed using the linear Minimum Mean Square Error(MMSE) criterion. Layered space-time processing based on the ordered successive interference cancelation (OSIC) [7] isadopted to further improve the equalization performance. With the OSIC technique, transmitted streams are detectedin an order that strong streams are equalized and detected earlier, and each stream is equalized with the co-channelinterference (CCI) from all previously detected streams already subtracted out.
III. Experimental Results
Two deployments were adopted to conduct several experiments off the northwestern coast of Kauai, Hawaii, inSeptember 2005. Herein, the results for the low band transmission of deployment one are presented. The low bandtransmission uses a bandwidth of 14 kHz for transmitting BPSK, QPSK and 8PSK modulation symbols at a rate of 10kilosymbols per second. The centered carrier frequency is fc =32 kHz. Ten transducers are used in the experiments,and the number of receive hydrophones is eight.
The modulation symbols are transmitted in packets. Each packet consists of three parts: the first part is a sequenceof 10 consecutive probe signals, each having a duration of 0.4 seconds, transmitted by transducers 1 to 10 sequentially,plus a 0.2 seconds clear time at the end. The second part is the 4.8-seconds data payload, transmitted only from

TAO, ZHENG, XIAO, YANG AND YANG PREPARED FOR SUBMISSION TO WUWNET 08 2
selected transducers. The number of selected transducers N varies from 1 to 10, so that MIMO communications withdifferent number of transmitters can be implemented. The last part is a 3-seconds clear time used for transmissionsystem re-synchronization. The whole transmitted packet has a time duration of 12 seconds.
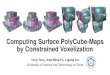
Each of the ten probe signals contains a linear frequency modulation (LFM) signal, which is used for packet coarsesynchronization. Moreover, the channel length L is also estimated with LFM signal by measuring the span of the LFMcorrelation main ridge. It’s shown that for all MIMO subchannels, most of the channel energy is concentrated within 10ms which corresponds to a channel length of L = 100 in terms of symbol interval Ts = 0.1 ms. In practical processing,the 4.8-seconds received packet containing 48000 symbols, is artificially partitioned into blocks with a block size ofNb =200 symbols. The group-wise phase correction algorithm adopts a group size of Ns =20. The 2× 8 BPSK, QPSKand 8PSK packets are processed. The scatter plots in Fig. 1, Fig. 2 and Fig. 3 are the equalized and phase-correctedBPSK, QPSK and 8PSK signals, respectively, with a 2 × 8 MIMO implementation. The figures clearly indicate thatmost of the symbols can be properly classified.
−1 0 1
−1.5
−1
−0.5
0
0.5
1
1.5
Imag
inar
y
Real
Phase−corrected signals of transmitter 1
Fig. 1. Phase-corrected BPSK signals witheight-receiver combining.
−1 0 1
−1.5
−1
−0.5
0
0.5
1
1.5
Imag
inar
y
Real
Phase−corrected signals of transmitter 1
Fig. 2. Phase-corrected QPSK signals witheight-receiver combining.
−1 0 1
−1.5
−1
−0.5
0
0.5
1
1.5
Imag
inar
y
Real
Phase−corrected signals of transmitter 1
Fig. 3. Phase-corrected 8PSK signals witheight-receiver combining.
The average uncoded BER for 2 × 8 MIMO communication is on the order of 8 × 10−4 for BPSK, 3 × 10−2 forQPSK, and 8 × 10−2 for 8PSK transmission.
Acknowledgments
This work was supported in part by the Office of Naval Research under Grant N00014-07-1-0219 and the NationalScience Foundation under Grant CCF-0832833.
References
[1] M. Stojanovic, J. Catipovic, and J. Proakis, “Phase-coherent digital communicaitons for underwater acoustic channels,” IEEE J.Ocean Eng., vol.19, pp.100-111, Jan. 1994.
[2] T. H. Eggen, A. B. Baggeroer, and J. C. Preisig, “Communication over Doppler spread channels – Part I: channel and receiverpresentation,” IEEE J. Ocean Eng., vol.25, pp.62-71, Jan. 2000.
[3] S. Roy, T. M. Duman, V. McDonald, and J. Proakis, “Enhanced underwater acoustic communication performance using space-timecoding and processing,” in Proc. Ocean’04, 2004.
[4] S. Roy, T. M. Duman, V. McDonald, and J. Proakis, “High rate communication for underwater acoustic channels using multipletransmitters and space-time coding: receiver structures and experimental results,” IEEE J. Ocean. Eng., vol.32, pp.663-688, July2007.
[5] B. Li, S. Zhou, M. Stojanovic, L. Freitag, J. Huang, and P. Willett, “MIMO-OFDM over an underwater acoustic channel,” in Proc.Oceans’07, Sept. 2007.
[6] J. Zhang, Y. R. Zheng, and C. Xiao, “Frequency-domain equalization for single-carrier MIMO underwater acoustic communications,”in Proc. OCEANS’08, Sept. 2008.
[7] A. Lozano and C. Papadias, “Layered space-time receivers for frequency-selective wireless channels,” IEEE Trans. on Commun., vol.50,pp.65-73, Jan. 2002.























![[Yang Xiao, Yi Pan] Security in Distributed and Ne(BookFi.org)](https://img.pdfslide.us/doc/110x75/563db77f550346aa9a8b9e8b/yang-xiao-yi-pan-security-in-distributed-and-nebookfiorg.jpg)



