-
8/2/2019 Tao Adaptive
1/35
9
8
6
7
Adaptive ControlBasics and Research
Gang Tao
-
8/2/2019 Tao Adaptive
2/35
19
8
6
7
Feedback Control System
-
Plant
-
Controller
Feedback
6
--r(t) e(t) u(t) y(t)
w(t)
Reference System- -
r(t) ym(t)
Goal of feedback control: limt(y(t) ym(t)) = 0
-
8/2/2019 Tao Adaptive
3/35
29
8
6
7
Issues of Automatic Feedback Control
System modeling
Control objectives
stability, transient, tracking, optimality, robustness
Parametric uncertainties
payload variation, component aging, condition change
Structural uncertainties
component failure, unmodeled dynamics
Environmental uncertainties
external disturbances
Nonlinearities
smooth functions and nonsmooth characteristics
-
8/2/2019 Tao Adaptive
4/35
39
8
6
7
Adaptive Control Methodology
Adapting to parametric uncertainties
Robust to structural and environmental uncertainties
Aimed at both stability (signal boundedness) and tracking
Self-tuning of controller parameters
Systematic design and analysis
Real-time implementable
Effective for failures and nonsmooth nonlinearities
High potential for applications
Attractive open and challenging issues
-
8/2/2019 Tao Adaptive
5/35
49
8
6
7
Direct Adaptive Control System
Adaptive law
(t)
PlantController
C(s;(t))
Reference model
-
-
-
6
-
66 6
?
?u(t)r(t) y(t)
ym(t)
(t)
-
8/2/2019 Tao Adaptive
6/35
59
8
6
7
Indirect Adaptive Control System
Design
equation
Parameter estimator
p(t)
Plant
G(s;p)
Controller
C(s;c(t))- -
6
-
66
?u(t)ym(t) y(t)
c(t)
p(t)
-
8/2/2019 Tao Adaptive
7/35
69
8
6
7
Control System Dynamic Models
Nonlinear models
x = f(x, u, w), y = h(x, u, v)
state vector x Rn, input u, output y, disturbances w, v; or
x = f(x) + g(x)u + d(x)w, y = h(x, u) + v
Linear state-variable model
x = Ax +Bu +Bww, y = Cx +Du + v
Linear time-invariant input-output model
y(t) = G(s)[u](t) + d(t)
G(s) = G0(s)(1 +m(s)) +a(s), G0(s) = kpZ(s)
P(s)
a(s), m(s): additive, multiplicative unmodeled dynamics.
-
8/2/2019 Tao Adaptive
8/35
79
8
6
7
Aircraft Flight Control System Models
State variables
x,y,z = position coordinates = roll angleu, v, w = velocity
coordinates = pitch anglep = roll rate = yaw angleq = pitch rate =
side-slip angler = yaw rate = angle of attack
-
8/2/2019 Tao Adaptive
9/35
-
8/2/2019 Tao Adaptive
10/35
99
8
6
7
Linearized longitudinal equations
u
w
q
=
Xu Xw W0 g0 cos0Zu Zw U0 g0 sin0
Mu Mw Mq 00 0 1 0
u
w
q
+
Xe
Ze
Me
0
e
output = : pitch angle perturbation
Linearized lateral equations
r
p
=
Yv U0 V0 g0 cos0Nv Nr Np 0
Lv Lr Lp 0
0 tan0 1 0
r
p
+
Yr Ya
Nr Na
Lr La
0 0
r
a
output = r: yaw rate perturbation
-
8/2/2019 Tao Adaptive
11/35
109
8
6
7
Adaptive Control versus Fixed Control
System
y(t) = (ap +)y(t) + u(t)
Reference model
yr(t) = aryr(t) + r(t), ar > 0
Ideal controller for = 0
u(t) = ky(t) + r(t), k = ap ar
Ideal performance for = 0
y(t) = ary(t) + r(t), limt
(y(t) yr(t)) = 0
Fixed controller for [1,2]
u(t) = ky(t) + r(t), k< ap 2
-
8/2/2019 Tao Adaptive
12/35
119
8
6
7
Closed-loop system
y(t) = ary(t) + (ap ++ k+ ar)y(t) + r(t),
e(t) = y(t) yr(t) =ap ++ k+ ar
s + ar
1
s ap k[r](t)
Tracking performance (for r(t) = 1)
ess = limt
e(t) = ap ++ k+ arar(ap ++ k)
Adaptive controller
u(t) = k(t)y(t) + r(t)
k(t) = e(t)y(t), > 0
with k(0) being arbitrary, leading to limt e(t) = 0.
Observation: an adaptive controller ensures desired stability
and
tracking, despite any large parameter uncertainty .
-
8/2/2019 Tao Adaptive
13/35
129
8
6
7
Our Recent Work
G. Tao and P. V. Kokotovic, Adaptive Control of Systems with
Actuator and Sensor Nonlinearities, John Wiley & Sons,
1996.
G. Tao and F. L. Lewis, eds., Adaptive Control of Nonsmooth
Dynamic Systems, Springer, London, 2001.
A. Taware and G. Tao, Control of Sandwich Nonlinear
Systems,Springer, Berlin, 2003.
G. Tao, Adaptive Control Design and Analysis, John Wiley &
Sons,
Hoboken, New Jersey, 2003.
G. Tao, S. H. Chen, X. D. Tang and S. M. Joshi, Adaptive Control
of
Systems with Actuator Failures, Springer, 2004.
-
8/2/2019 Tao Adaptive
14/35
139
8
6
7
Adaptive Control of Aircraft with Synthetic Jet Actuators
-
8/2/2019 Tao Adaptive
15/35
149
8
6
7
Synthetic Jets for Aircraft Flight Control
Physics of synthetic jet
piezo-electric sinusoidal voltage acts on diaphragm
diaphragm vibrations cause cavity pressure variations
ejection and suction of air, creating vortices
jet is synthesized by a train of vortices
lift is produced on the airfoilvirtual shaping.
-
8/2/2019 Tao Adaptive
16/35
159
8
6
7
Tailless aircraft with jets (top view)
-
8/2/2019 Tao Adaptive
17/35
169
8
6
7
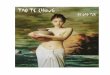
Simulation Results
System state variables
lateral velocity: x1(t) roll rate: x2(t)
yaw rate: x3(t) roll angle: x4(t)
System model
A =
0.0134 48.5474 632.3724 32.07560.0199 0.1209 0.1628 0
0.0024 0.0526 0.0252 0
0 1 0.0768 0
, B =
00.0431
0.0076
0
D. L. Raney, R. C. Montgomery, L. L. Green and M. A. Park,
Flight Control
using Distributed Shape-Change Effector Arrays, AIAA paper
No.
2000-1560, April 3-6, 2000
-
8/2/2019 Tao Adaptive
18/35
179
8
6
7
Control gain K LQR design with Q = I4, R = 10
K=
1.0113 77.1793 115.8959 9.1691
P =
0.751 14.980 159.812 8.261714.980 27181.878 138979.668
7843.345
159.813 138979.668 723352.800 40670.052
8.262 7843.345 40670.052 2301.187
Reference signal:
r(t) =
1.5sin(t) 0 t 60
1.5sin(t) + 3sin(2t) t 60
Adaptation gains: 1 = 1, 2 = 2
-
8/2/2019 Tao Adaptive
19/35
-
8/2/2019 Tao Adaptive
20/35
199
8
6
7
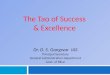
0 50 100 150 20010
010
Tracking error e1(t) vs. time (sec)
ft/sec
0 50 100 150 2000.2
0
0.2
Tracking error e2(t) vs. time (sec)
deg/
sec
0 50 100 150 2000.05
0
0.05
deg/sec
Tracking error e3(t) vs. time (sec)
0 50 100 150 2000.5
0
0.5
deg
Tracking error e4(t) vs. time (sec)
Figure 2: State tracking errors.
20
-
8/2/2019 Tao Adaptive
21/35
209
8
6
7
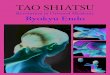
Simulation II: Comparison with a fixed inverse
0 50 100 150 20010
5
0
Tracking error e1(t) vs. time (sec)
ft/sec
0 50 100 150 2000.1
0
0.1
Tracking error e2(t) vs. time (sec)
deg/se
c
0 50 100 150 2000.1
0
0.1
deg/sec
Tracking error e3(t) vs. time (sec)
0 50 100 150 2001
0.5
0
deg
Tracking error e4(t) vs. time (sec)
Figure 3: State tracking errors with a fixed inverse.
21
-
8/2/2019 Tao Adaptive
22/35
219
8
6
7
Adaptive Actuator Failure Compensation
Actuator failures
common in control systems
uncertain in failure time, pattern, parameters
undesirable for system performance
Adaptive control
deals with system uncertainties
ensures desired asymptotic performance
is promising for actuator failure compensation
has potential for critical applications
22
-
8/2/2019 Tao Adaptive
23/35
229
8
6
7
Effective methods for handling system failures
multiple-model, switching and tuning
indirect adaptive control
fault detection and diagnosis
robust or neural control
Direct adaptive failure compensation approach
use of a single controller structure
direct adaptation of controller parameters no explicit failure
(fault) detection
stability and asymptotic tracking
Potential applications include aircraft flight control
smart structure vibration control
space robot control
23
-
8/2/2019 Tao Adaptive
24/35
239
8
6
7
Systems with Actuator Failures
System Models
x = f(x) +m
j=1
gj(x)uj, y = h(x)
x = Ax +m
j=1bjuj, y = Cx
state variable vector: x(t) Rn
output: y(t)
input vector: u = [u1, . . . , um]T Rm whose components mayfail
during system operation
f(x), gj(x), h(x), A, bj, C with unknown parameters.
24
-
8/2/2019 Tao Adaptive
25/35
249
8
6
7
Actuator Failures
Loss of effectiveness
uj(t) = kj(t)vj(t), kj(t) (0, 1), t tj
Lock-in-place
uj(t) = uj, t tj, j {1, 2, . . . , m}
Lost control
uj(t) = uj +k
djkjk(t) +j(t), t tj, j {1, . . . , m}
Failure uncertainties
the failure values kj, uj and djk, failure time tj, pattern j,
and
components j(t) are all unknown.
How much, how many, which and when the failures happen??
25
-
8/2/2019 Tao Adaptive
26/35
259
8
6
7
Examples
aircraft aileron, stabilizer, rudder or elevator failures
their segments stuck in unknown positions
their unknown broken pieces (including wings)
satellite motion control actuator failures
MEM actuator/sensor failures on fairing surface
heating device failures in material growth
generator failures in power systems
transmission line failures in power system
power distribution network failures
cooperating manipulator failures
bioagent distribution system failures
etc.
26
-
8/2/2019 Tao Adaptive
27/35
9
8
6
7
Block Diagram
Controller System
--
11
..
.
...
-?
1-
-
1m
-- ?-
-
-
m-
ru
m
u1
yu1...
um
v1...
vm
27
-
8/2/2019 Tao Adaptive
28/35
9
8
6
7
Research Goals
Theoretical framework for adaptive control of systems with
uncertainactuator (sensor, or component) failures
Guidelines for designing control systems with guaranteed
stability
and tracking performance despite parameter and failure
uncertainties
Solutions to key issues in adaptive failure compensation:
controller
structures, design conditions, adaptive laws, stability,
robustness
New adaptive control techniques for critical systems (e.g.,
aircraft) toimprove reliability and survivability.
28
-
8/2/2019 Tao Adaptive
29/35
9
8
6
7
Example: Boeing 737 Landing
System model
x(t) = Ax(t) +Bu(t), y(t) = , B = [b1, b2]
T
x = [Ub,Wb, Qb,]T: forward speed Ub, vertical speed Wb, pitch
angle
, pitch rate Qb; u = [dele1, dele2]T: elevator segment
angles
Study of an aircraft with two elevator segments
Output feedback output tracking design
One elevator segment fails during landing at t = 30 sec.
Simulation results
response with no compensation (fixed feedback)
response with adaptive compensation.
29
-
8/2/2019 Tao Adaptive
30/35
9
8
6
7
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
time (sec)
y(t),ym(t)(rad) y(t)
ym
(t)
0 10 20 30 40 50 60 70 80 90 1000
0.005
0.01
0.015
time (sec)
e(t)(rad)
0 10 20 30 40 50 60 70 80 90 1004
3
2
1
0
time (sec)
v(t)
(deg)
30
-
8/2/2019 Tao Adaptive
31/35
9
8
6
7
0 10 20 30 40 50 60 70 80 90 100
0
0.02
0.04
0.06
0.08
time (sec)
y(t),ym(t)(rad) y(t)
ym
(t)
0 10 20 30 40 50 60 70 80 90 1000.01
0
0.01
0.02
time (sec)
e(t)(rad)
0 10 20 30 40 50 60 70 80 90 1004
3
2
1
0
time (sec)
v(t)(deg)
31
-
8/2/2019 Tao Adaptive
32/35
9
8
6
7
Example: Boeing 737 Lateral Motion
MIMO system model
x = Ax +Bu, y = Cx
x = [vb,pb, rb,,]T: lateral velocity vb, roll rate pb, yaw rate
rb, roll
angle , yaw angle
y = [,]T: roll angle , yaw angle
u = [dr, da]T: rudder position dr, aileron position da,
segmented into: dr1, dr2, da1, da2
Actuator failures
dr2 fails at t = 50, da2 fails at t = 100 seconds
Simulation results
32
-
8/2/2019 Tao Adaptive
33/35
9
8
6
7
0 20 40 60 80 100 120 140 160 180 2000
1
2
3
4
5
6
7
Roll angle (t): , reference outputm(t):
deg
0 20 40 60 80 100 120 140 160 180 2000
2
4
6
8
10
Yaw angle(t): , reference outputm(t):
deg
33
-
8/2/2019 Tao Adaptive
34/35
9
8
6
7
Research Interests
Adaptive control theory
actuator/sensor/component failure compensation
multivariable and nonlinear systems actuator and sensor
nonlinearity compensation
Adaptive control applications
aircraft flight control fairing structure vibration
reduction
space robot cooperative and compensation control
synthetic jet actuator compensation control
satellite motion control
high precision pointing systems
dynamic sensor/actuator networks
34
-
8/2/2019 Tao Adaptive
35/35
9
8
6
7
Some On-Going Research Projects
Rudder failure compensation by engine differentials
aircraft model with engine differentials
adaptive failure compensation control
Adaptive compensation control for aircraft damages
dynamic modeling of aircraft damages
direct adaptive damage compensation control
Adaptive compensation control for synthetic jet actuators
Adaptive failure compensation for space robots
Adaptive compensation of sensor failures
Adaptive control of spacecraft with fuel slosh.