Embed Size (px)
Citation preview

TAMDAR Winds
Some results from a study of the ATReC/AIRS-II Campaign Data
Robert Neece, NASA Langley Research Center

The Study
Objectives:– Verify the quality of the data– Identify sources of error
Primarily looked at 2 days: 11/26/03 and 12/5/03 Challenges
– Many potential sources of error– Difficult to sort out effects– Problems with sampling rate and data dropouts– No real truth data– No accepted measure for comparison

Conclusions
TAMDAR winds are very good Primary sources of error are identifiable
and can be addressed to improve accuracy

Flight 11/26/03
Chosen because of large errors over significant periods
Identified flight characteristics that might affect error
Divided flight into segments with isolated effects (e.g. climbing, cruising, turning, etc.)
Key findings– A vector correlation function was needed– Data latency is an important factor– Aircraft turning is associated with largest error

Flight 11/26/2003 Wind Velocity Comparison

Vector Correlation Coefficient
Discovered papers concerning a method of correlation for vector data like winds (e.g. Crosby, Breaker & Gemmil)
Eventually understood it and wrote a Matlab function to implement it
This function is a primary measurement of agreement
The correlation scale is 0 to 2

Data Dropouts and Sampling
Data dropouts up to 360 s Usually the interval between TAMDAR data points
was 3, 6, 9, or 12 seconds Option 1 – find matching data points in the Citation
(1-second) data– Sparse sampling– Irregular rate
Option 2 – utilize the TAMDAR debug data with a 3-second sampling interval– Must calculate winds– Loses some TAMDAR products

Computing the Wind
Wind vector = Vw = -(Vg – Va) Vg is derived from GPS ground track
data Vw is derived onboard from aircraft
heading and airspeed When Vg and Va are large with respect
to Vw, error becomes worse

TAMDAR Data Quality
Segment Cruise1, 11/26/2003– 42 minutes– Vector correlation with Citation = 1.92– Tamdar:
• 55.3 m/s @ 249°, mean• 2.3 m/s and 2.5°, std. dev.
– Citation• 55.6 m/s @ 247°, mean• 2.1 m/s and 2.4°, std. dev.

TAMDAR Data Quality
Segment Cruise2, 11/26/2003– 19 minutes– Vector correlation = 1.63– Tamdar:
• 56.8 m/s @ 256°, mean• 2.3 m/s and 2.0°, std. dev.
– Citation• 56.6 m/s @ 257°, mean• 2.3 m/s and 1.9°, std. dev.

Data Latency and Filtering
Comparison of the Citation and TAMDAR data suggested different degrees of filtering and/or sensor response characteristics– Experimented with some filtering– Found this to be a minor effect
Clear evidence of significant latency differences– TAMDAR data lags Citation data by about 12s– This is an important factor when comparing
Citation and TAMDAR data

Latency Examples12/05/2003
Segment ClimbHa

Errors While Turning
Large errors occur when turning, even for brief heading corrections
Errors in corkscrew turns suggested a rotating vector error
Theory: a time difference in the latency of track versus heading data causes the error

Wind Error VectorVw = 0
Aircraft turns at constant speed.
Va = Vg
If Vg is delayed, an error vector appears as a rotating wind vector.
N
E
Va
Vg
Va
Vg
Va
Vg
Va
Vg

Full Flight: no corrections

Estimating Tau, the Time Delay
First estimated tau graphically in segment DM2, tau = 2.4 sec– Based on a short segment of seemingly
noise-free data– Time-shifted heading data using tau and
recalculated winds in DM2– Error was successfully reduced

Investigating Tau
Theorized that tau should be constant for a flight
Derived a formula for tau– Sign of tau is indeterminant– Calculated tau versus time in DM1– tau = 1.5 sec (ave.)
Wrote Matlab functions to calculate tau and to apply corrections to wind calculations
Experimented with compensation using tau

Segment DM1: testing tau

Segment DM1: testing tau
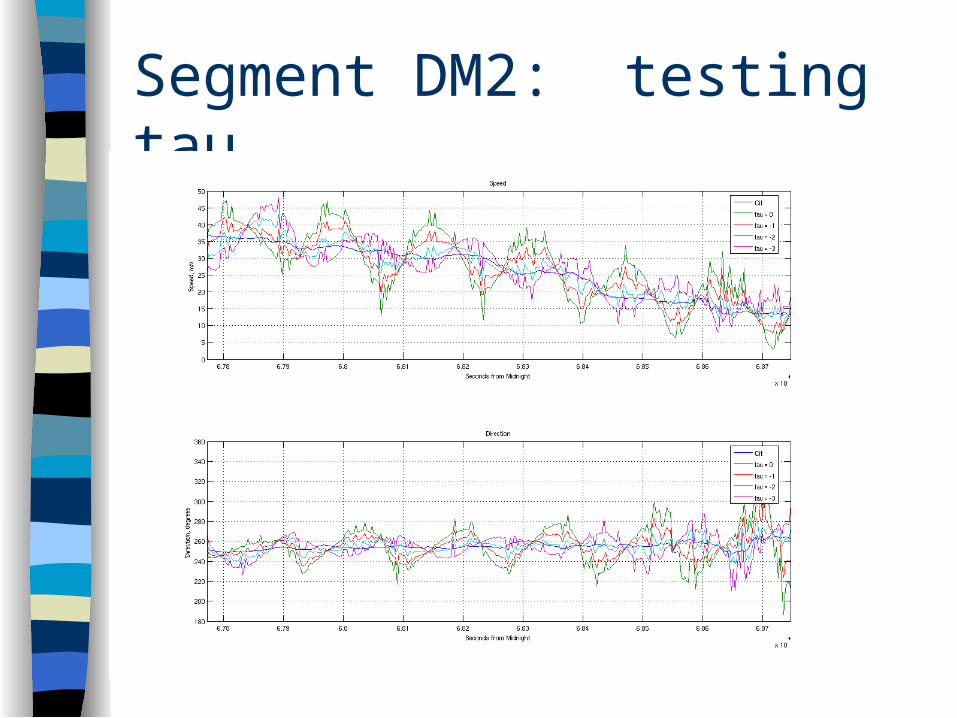
Segment DM2: testing tau

Segment DM2: tau = -2.5 s

Full Flight: tau = -1.5s

Full Flight: tau = -2.5s

Look for the Change in Tau

Tau, Some Conclusions
There is a time delay between inertial data and GPS data
The time delay is the major source of error during turns
Error increases with turn rate The time delay is not fixed during a flight Time misalignment should be kept to less
than 0.5 second

Offset Errors Flight 11/26/2003
Segment MA

Conclusions
TAMDAR wind data is very good It can be significantly improved by addressing
two sources of error– Time alignment of data streams
• Inertial data should be delayed to match GPS data• Accuracy on the order of 0.5 second or better is desired
– Offset errors appear to be due to a specific source and can potentially be mitigated