Embed Size (px)
Citation preview

Extremes (2008) 11:113–133DOI 10.1007/s10687-007-0046-y
Tail and dependence behavior of levelsthat persist for a fixed period of time
Marta Ferreira · Luísa Canto e Castro
Received: 26 July 2006 / Revised: 22 August 2007 /Accepted: 3 October 2007 / Published online: 9 November 2007© Springer Science + Business Media, LLC 2007
Abstract This work emerges from a study of the extremal behavior of a dailymaximum sea water levels series, {Xi}, presented in Draisma (Duration ofextremes at sea. In: Parametric and semi-parametric methods in E. V. T.,pp. 137–143. PhD thesis, Erasmus, University, 2001). In its approach, a newseries, {Yi}, is defined, consisting of water levels that persist for a fixed periodof time. In this paper, we study the tail behavior of {Yi}, in case {Xi} isindependent and identically distributed (i.i.d.) and in case {Xi} is a max-autoregressive sequence (we will consider two different max-autoregressiveprocesses), whose distribution function is in the Fréchet domain of attraction.We also determine Ledford and Tawn tail dependence index (Ledford andTawn, Biometrika 83:169–187, 1996, J. R. Stat. Soc. B 59:475–499, 1997) andwe analyze the asymptotic tail dependence of the random pair (Yi, Yi+m), in allconsidered cases. According to Drees (Bernoulli 9:617–657, 2003), we obtainthe limit behavior of the tail empirical quantile function associated with arandom sample (Y1, Y2, ...Yn) and hence the asymptotic normality of a classof estimators of the tail index that includes Hill estimator.
Keywords Max-autoregressive processes · Tail index · Extremal index ·Tail dependence index · Tail empirical quantile function
AMS 2000 Subject Classification Primary—60G70; Secondary—60J10
Research partially supported by FCT/POCTI and POCI/FEDER.
M. FerreiraCMAT, University of Minho, Braga, Portugale-mail: [email protected]
L. Canto e Castro (B)CEAUL, Faculty of Sciences, University of Lisbon, Lisbon, Portugale-mail: [email protected]

114 M. Ferreira, L. Canto e Castro
1 Introduction
The main objective of an extreme value analysis is to estimate the probabilityof events that are more extreme than any that have already been observed. Byway of example, suppose that a sea-wall projection requires a coastal defensefrom all sea-levels, for the next 100 years. Extremal models are a precioustool that enables extrapolations of this type. The central result in classicalextreme value theory (EVT) states that, for an i.i.d. sequence, {Xn}n≥1, havingcommon distribution function (d.f.) F, if there are constants an > 0 and bn ∈ R
such that,
P(max(X1, ..., Xn) ≤ anx + bn) −→n→∞ Gγ (x), (1)
for some non-degenerate function Gγ , then it must be the generalized extremevalue function (GEV),
Gγ (x) = exp(−(1 + γ x)−1/γ
), 1 + γ x > 0, γ ∈ R,
(G0(x) = exp(−e−x)) and we say that F belongs to the max-domain of at-traction of Gγ , in short, F ∈ D(Gγ ). The parameter γ , known as the tailindex, is a shape parameter as it determines the tail behavior of F, being so acrucial issue in EVT. Considering the tail quantile function (q.f.), F−1(1 − t) =inf{x : F(x) ≥ 1 − t}, we have, F ∈ D(Gγ ) for γ > 0, if and only if
F−1(1 − tx) ∼ x−γ F−1(1 − t) , as t → ∞, (2)
which is also equivalent to a −1/γ -regularly varying tail at ∞, i.e.,
1 − F(x) = x−1/γ LF(x), where LF is a slowly varying function. (3)
However, an adverse situation may also be the permanency of high values intime. Draisma (2001) broaches this problem with regard to successive high tidewater levels registered on some places of Holland’s coast which may damagethe sand dunes and hence give rise to devastating floods. More formally, givena time series of water levels, {X1, ..., Xn}, he presents a new sequence {Yi}, suchthat, for each positive integer i,
Yi = min(Xi, ..., Xi+s), (4)
where s is some fixed positive integer, that is, {Yi} is a sequence where each ob-servation yi is a value that persist for s + 1 successive periods of time. Our studyis focused on {Yi} extremal behavior. We will analyze separately the case where{Xi} is an i.i.d. sequence and two particular cases where {Xi} is a stationaryone. Max-autoregressive processes are very interesting examples of stationarysequences, when the purpose is an extremal behavior analysis. Hence, we willconsider first, on Section 3.1, that {Xi} is an ARMAX process (Alpuim 1989)and, on Section 3.2, we will present the process ARMAXp (Ferreira and Cantoe Castro 2006) whose special feature is the relationship between the parameterof the process and the Ledford and Tawn tail dependence index, η (Ledfordand Tawn 1996, 1997). This parameter, η, appears with the Ledford and Tawnmodel whose main purpose was to “catch” a penultimate tail dependence in

Levels that persist in time 115
the tail of the components of a random vector and hence distinguish betweenasymptotic independence and dependence.
Both processes, ARMAX and ARMAXp, have a weak dependence struc-ture in the sense that it vanishes as observations become more distant intime. In fact they verify the β-mixing condition (Drees 2003), D(un) condition,as well as, the local dependence conditions, D′(un) or D′′(un) for some realsequence {un} (Leadbetter et al. 1983; Leadbetter and Nandagopalan 1989).The validity of these dependence conditions are also analyzed for the sequence{Yi}, in cases where the underlying sequence ({Xi}) is i.i.d., or ARMAX or evenARMAXp. Furthermore, we will compute the above mentioned parameters,γY and ηY and the extremal index θY , whenever condition D′′(un) is verified.We will also derive the limiting distribution of a specific class of the tailindex estimators that includes the Hill estimator, denoted by γ (Y)
H (Drees 2003,Theorem 2.1; see also Appendix 1).
In Section 2 we consider {Xi} an i.i.d. sequence and we prove that conditionsD(un) and D′(un) both hold for {Yi}, for some real sequence {un}, leadingto an unit extremal index. We conclude that {Yi} has tail index dependingon s (related to the number of observations of Xi that are considered in thedefinition of Yi). In this case we also compute the second order index, ρ, animportant parameter for the estimation of the tail index, γ , in what respectsthe rate of convergence. We will obtain the same value of ρ for sequences {Xi}and {Yi}. The tail dependence parameter, η, calculated for the pairs (Yi, Yi+m)
where m is some positive integer, also depends on s. We state a limitingprocess for the tail empirical quantile function of Y and hence the asymptoticnormality of Hill estimator (Drees 2003). In Section 3.1, {Xi} is an ARMAXprocess with stationary distribution, H. We will see that {Yi} is a β-mixingsequence and so, it verifies condition D(un). Condition D′′(un) also holds forsome real sequence {un}. We prove that {Yi} has common d.f. in the samedomain of attraction of H, we show that (Yi, Yi+m) has unit tail dependenceindex and we state the limiting process of the tail empirical quantile functionand the normality of Hill estimator as well. Finally, in Section 3.2, we consider{Xi} an ARMAXp process with stationary distribution, K. We shall see that{Yi} is β-mixing and conditions D(un) and D′′(un) both hold for a given realsequence {un}. Nevertheless, we arrive at a unit extremal index. We also provethat {Yi} has a tail index that depends on the parameter of the process {Xi} andthe same happens with the tail dependence index calculated for the randompair (Yi, Yi+m).
2 The i.i.d. Case
Let {Xi} be an i.i.d. sequence, for instance, an high tide independent waterlevels sequence with common d.f. F. Let {Yi} be a sequence of levels thatpersist s + 1 periods of time as defined in Eq. 4. The sequence {Yi} is obviouslystationary, hence it exists a common marginal d.f., which we denote by FY .We have that {Yi} is an (s + 1)-dependent sequence (Watson 1954), and so it

116 M. Ferreira, L. Canto e Castro
is obviously β-mixing and verifies condition D(un) for any real sequence {un}.Let us see that D′(un) also holds for some sequence of levels {un}, that is, weprove that,
lim supn→∞
n[n/k]∑
i=2
P(Y1 > un, Yi > un
) −→k→∞
0. (5)
Applying the definition of sequence {Yi} in Eq. 4, and after some simplecalculations,
lim supn→∞
n[n/k]∑
i=2
P(Y1 > un, Yi > un
)
= lim supn→∞
ns+1∑
i=2
(1 − F(un))i+s + n
[n/k]∑
i=s+2
(1 − F(un))2+2s. (6)
Taking {un} such that n1/(s+1)(1 − F(un)) → τ , as n → ∞ or equivalently,n(1 − FY(un)) → τ , as n → ∞, the assertion follows. Hence, θY = 1.
The estimation of the tail index, γ , for heavy tail d.f.’s (i.e. γ > 0), usuallyrequires second order properties on the tail q.f. F−1(1 − t) in order to getinformation about the rate of convergence. In this context emerges a newparameter, ρ, known as the second order index. In literature, many allusions tosecond order condition can be found (e.g., Geluk and de Haan 1987; Dekkersand de Haan 1993; de Haan and Stadtmuller 1996; de Haan and Resnick 1997;Drees 1998a). When γ > 0, F−1(1 − t) is said to be second order regularlyvarying, if there is a positive and locally bounded function, A(t), which isρ-regularly varying at 0 and A(t) → 0, as t ↓ 0, such that,
limt↓0
F−1(1 − tx)/F−1(1 − t) − x−γ
A(t)= x−γ xρ − 1
ρ, (7)
with ρ ≥ 0. In the next proposition we compute the tail index, γY and thesecond order index, ρY , for sequence {Yi}, whenever {Xi} has tail index γ andsecond order index ρ.
Proposition 2.1 If F ∈ D(Gγ ) for some γ > 0 and verifies the above secondorder regularly varying condition with index ρ ≥ 0, then the sequence {Yi}defined in Eq. 4 is such that, FY ∈ D(Gγ /(s+1)) and also verifies the second orderregularly varying condition with the same index, i.e., ρY = ρ.
Proof By Eq. 3 and the independence of {Xi},1 − FY(x) = (1 − F(x))s+1 = x− 1
γ /(s+1) (LF(x))s+1
(8)
and hence, γY = γ /(s + 1). Now we turn ourselves to the second ordercondition. Observe first that
F−1
Y (1 − t) = F−1(1 − t1/(s+1)
). (9)

Levels that persist in time 117
Applying Eq. 7 and letting t ↓ 0, it follows that
F−1(1 − t1/(s+1)
) ∼ F−1(1 − xt1/(s+1)
)[
A(t1/(s+1)
)x−γ xρ − 1
ρ+ x−γ
]−1
,
and if we use relation (9) then,
F−1
Y (1 − tx)/F−1
Y (1 − t) − x−γ /(s+1) ∼
∼ F−1(1 − (xt)1/(s+1))
F−1(1 − xt1/(s+1))[
A(t1/(s+1)
)x−γ xρ−1
ρ+ x−γ
]−1 − x−γ /(s+1)
= x−γ /(s+1)
{F−1(1 − (xt)1/(s+1))
F−1(1 − xt1/(s+1))
[A(t1/(s+1)
)x−sγ /(s+1)
xρ − 1
ρ+ x−sγ /(s+1)
]− 1
}.
Therefore, applying Eq. 2, we have,
F−1Y (1 − tx)/F−1
Y (1 − t) − x−γ /(s+1) ∼
∼ x−γ /(s+1)
{xsγ /(s+1)
[A(t1/(s+1)
)x−sγ /(s+1)
xρ − 1
ρ+ x−sγ /(s+1)
]− 1
}
= x−γ /(s+1) A(t1/(s+1)
) xρ − 1
ρ. �
Now we focus on the computation of Ledford and Tawn tail dependenceindex η for the pair (Y1, Y1+m). We must show that
P(Y1 > F−1(1 − tx), Y1+m > F−1
Y(1 − ty))
P(Y1 > F−1(1 − t), Y1+m > F−1(1 − t))−→
t↓0c(x, y), (10)
uniformly on {(x, y)| max(x, y)=1}, where the function c is non-degenerate andhomogeneous of order 1/η (c(tx, ty)= t1/ηc(x, y)). The marginals are asympto-tically independent if 0 < η < 1, dependent if η=1 and (almost) independentif η=1/2 (Ledford and Tawn 1996, 1997; Draisma et al. 2004).
Proposition 2.2 Let {Yi} be the sequence defined in Eq. 4. Consider therandom pair (Y1, Y1+m) composed by two r.v.’s with a lag-distance m. Thenη = (s + 1)/(s + m + 1) for m ≤ s and η = 1/2 for m > s.
Proof In order to obtain the value of the parameter η, we are going to computethe function c(x, y) in Eq. 10, considering, without loss of generality, that x< y.For the numerator we obtain:
P(Y1 > F−1
Y (1 − tx) , Y1+m > F−1Y (1 − ty)
)
=
⎧⎪⎨
⎪⎩
[1 − F
(F−1
Y (1 − tx))]s+1 [
1 − F(F−1
Y (1 − ty))]m
, if m ≤ s
[1 − F
(F−1
Y (1 − tx))]s+1 [
1 − F(F−1
Y (1 − ty))]s+1
, if m > s.

118 M. Ferreira, L. Canto e Castro
Hence, applying Eq. 9, we have
P(
Y1 > F−1Y
(1 − tx
), Y1+m > F−1
Y
(1 − ty
)) ∼⎧⎨
⎩
(tx)(ty)m/(s+1) , m ≤ s
(tx)(ty) , m > s.
Note that we can get an approach to the denominator in Eq. 10 if we takex = y = 1 in the last development. Therefore, we conclude that
c(x, y) =⎧⎨
⎩
xym/(s+1) , m ≤ s
xy , m > s,
which is an homogeneous function of order (s + m + 1)/(s + 1) if m ≤ s and oforder 2 if m > s, which proves the result. �
Let us now check the limiting behavior of the tail empirical q.f., Qn(t) =Yn−[knt]:n, according to Drees (2003), Theorem 2.1 (see Theorem A.1 inAppendix 1). For this purpose, we must check its statements (20) and (21).
Proposition 2.3 Let {Yi} be the sequence defined in Eq. 4. Then condition (20)holds with cm(x, y) = 0, for all m ∈ N.
Proof Note that, if we replace t by kn/n and consider n → ∞ in the proof ofProposition 2.2, we can obtain cm(x, y) defined in Eq. 20 immediately. Hence,
cm(x, y) = limn→∞
nkn
⎧⎪⎪⎨
⎪⎪⎩
(knn
)(s+m+1)/(s+1)
xym/(s+1) , m ≤ s
(knn
)2xy , m > s
= 0.
�
Proposition 2.4 Let {Yi} be the sequence defined in Eq. 4. Then condition (21)holds with D1 = 2(1 + ε) for some ε > 0 and function ρ(m) given by
ρ(m) ={(
1 − 12s−m+1
)2m, if m ≤ s
0 , if m > s.
Proof Consider In(x, y) = ]F−1
Y
(1 − kn
n y), F−1
Y
(1 − kn
n x)]
. If m > s, we use thefact that {Yi} is (s + 1)-dependent and the independence of {Xi} to obtain,successively,
nkn
P(Y1 ∈ In(x, y), Y1+m ∈ In(x, y)
)
= nkn
P(Y1 ∈ In(x, y)
)P(Y1+m ∈ In(x, y)
)
= nkn
(kn
n(y − x)
)2
≤ (y − x)
(kn
n2(1 + ε)
).

Levels that persist in time 119
If m ≤ s, it will occur overlapping with the r.v.’s that define Y1 and Y1+m.Consider C={Xi:1 + m≤i≤1 + s}, the set of the r.v.’s that overlap. In orderto find an upper bound for P
(Y1+m∈In(x, y)|Y1∈In(x, y)
), we will condition
first on (Y1∈C, Ym+1 ∈ C), meaning that min(X1+m, ..., X1+s) is less thanboth, min(X1, ..., Xm) and min(X2+s, ..., X1+m+s), then we will condition on(Y1∈C, Ym+1 �∈C) which corresponds to min(X1, ..., Xm) being greater thanmin(X1+m, ..., X1+s) which in turn is greater than min(X2+s, ..., X1+m+s) and,at last, we will condition on (Y1 �∈C) that is, min(X1, ..., Xm) is less thanmin(X1+m, ..., X1+s). The calculations are listed below:
P(Y1+m ∈ In(x, y)|Y1 ∈ In(x, y)
)
= P(Y1+m ∈ In(x, y)|Y1 ∈ In(x, y), Y1 ∈ C, Ym+1 ∈ C
)P(Y1 ∈ C, Ym+1 ∈ C
)
+P(Y1+m ∈ In(x, y)|Y1 ∈ In(x, y), Y1 ∈C, Ym+1 �∈ C
)P(Y1 ∈C, Ym+1 �∈ C
)
+P(Y1+m ∈ In(x, y)|Y1 ∈ In(x, y), Y1 �∈ C
)P(Y1 �∈ C
)
=(
1 − 1
2s−m+1
)2m
+[(
kn
ny)m/(s+1)
−(
kn
nx)m/(s+1)
](1 − 1
2s−m+1
)m
×(
1 −(
1 − 1
2s−m+1
)m)+ kn
n(y − x)
(1 −
(1 − 1
2s−m+1
)m).
Therefore, since x, y ∈ (0, 1 + ε] , we can take the following upper bound,
nkn
P(Y1 ∈ In(x, y), Y1+m ∈ In(x, y)
)
≤ nkn
P(Y1 ∈ In(x, y)
)[(
1 − 1
2s−m+1
)2m
+ kn
n2(1 + ε)
]
= (y − x)
[(1 − 1
2s−m+1
)2m
+ kn
n2(1 + ε)
].
�
Corollary 2.5 Let {Yi} be the sequence defined in Eq. 4. Then, for the tailempirical quantile function Qn(t) = Yn−[knt]:n, Eq. 25 is valid with c(x, y) =min(x, y). Considering γ (Y)
H the tail index Hill estimator, then
k1/2n
(γ (Y)
H − γY
) −→ N(
0, σ 2H,γY
)
weakly with
σ 2H,γY
= γ 2Y
∫
(0,1]
∫
(0,1](st)−(γY +1) min(s, t)νH,γY
(ds)νH,γY(dt),
where γY = γ /(s + 1).
Proof It’s immediate by Theorem A.1, Proposition 2.3 and Proposition 2.4.�

120 M. Ferreira, L. Canto e Castro
3 Non i.i.d. Cases—ARMAX and ARMAX p
The motivation for studying the sequence of levels that persist for a fixedperiod of time emerges from its potential applicability to natural phenomenondata where the independence is usually an unrealistic assumption. On theother hand, the max-autoregressive models have revealed very useful in whatrespects the extremal analysis of time series. In this paper we consider theprocess ARMAX as defined in Alpuim (1989). We also consider a max-autoregressive process involving a power transformation, ARMAX-p, whoseparameter c ∈ (0, 1) interferes directly on the coefficient of tail dependence (η)of Ledford and Tawn. This process has been presented in Ferreira and Cantoe Castro (2006).
3.1 The ARMAX Case
Consider {Xi} a max-autoregressive process, ARMAX (Alpuim 1989),
Xi = max(cXi−1, Zi) , 0 < c < 1, (11)
where {Zi} is a sequence of i.i.d. r.v.’s with positive support, having commond.f. FZ and {Zi} also independent from {Xi}. The ARMAX is a particular caseof the max-autoregressive moving average (MARMA) processes presented inDavis and Resnick (1989). The process {Xi} defined in Eq. 11 has stationarydistribution, H, given by,
H(x) =∞∏
j=0
FZ(x/c j) , (12)
and any d.f. that is solution of equation
H(x) = FZ (x)H(x/c) (13)
is a stationary d.f. of {Xi}. The m-step transition probability function isgiven by,
Qm(x, ] − ∞, y]):=P(Xn+m≤y|Xn=x
)={
H(y)
H(y/cm), x ≤ y/cm
0 , otherwise.(14)
The ARMAX process is Markovian regenerative and aperiodic. So, thestrong-mixing assumption holds and hence the process is β-mixing and fulfillscondition D(un) for any real sequence {un}. Condition D′′(un) is verified forcertain normalized levels {un} of H and it has unit extremal index if H is in thedomain of attraction of a Weibull or a Gumbel distribution and θ = 1 − c1/γ ifH is in the domain of attraction of a Fréchet (see Canto e Castro 1992).
Proposition 3.1 Let {Xi} be an ARMAX process as defined in Eq. 11 such thatFZ ∈ D(Gγ ) for some γ > 0. Then H ∈ D(Gγ ).

Levels that persist in time 121
Proof Recall that our assumption is equivalent to
1 − FZ (x) ∼ x−1/γ LZ (x) , as x → ∞, (15)
for some slowly varying function LZ at +∞.Therefore, if we take logarithms in Eq. 12, we can write the following
approximation,
1 − H(x) ∼∞∑
j=0
x−1/γ c j/γ LZ(x/c j ) , as x → ∞.
Hence, as x → ∞, we have successively,
1 − H(x) ∼ x−1/γ LZ (x)
∞∑
j=0
c j/γ LZ (x/c j )
LZ (x)∼ x−1/γ LZ (x)
∞∑
j=0
c j/γ
= x−1/γ LZ (x)
1 − c1/γ. �
In the remainder of this section we consider the sequence {Yi} as definedin Eq. 4 where the underlying r.v.’s Xi are from an ARMAX process and westudy its dependence structure, as well as, its extremal behavior.
We can start by noticing that the stationarity of {Yi} follows immediately bydefinition and the stationarity of sequence {Xi}.
Deriving results in this context involves more calculations and so, in thesequel, we restrict ourselves to the case s = 1, though we presume that similarresults will be valid for any finite s. Generalization to the case s > 1 will beobject of future work.
The next proposition shows that, when H in the Fréchet domain of attrac-tion, unlike the i.i.d. case, the tail index of the sequence {Yi} is equal to the tailindex of the sequence {Xi}, which is not so surprising considering that, largevalues of {Yi} are proportional to large values of {Xi}. In what concerns theextremal index of {Yi} it also coincides with the extremal index of {Xi}.
Proposition 3.2 Let {Xi} be an ARMAX process as defined in Proposition 3.1and let Yi = min(Xi, Xi+1). Then,
1. FY ∈ D(Gγ );2. The extremal index of {Yi} is equal to the extremal index of {Xi}, i.e., θY = θX .
Proof See Appendix 2. �
The next proposition refers to the tail dependence index, η, for the bivariaterandom vector
(Y1, Y1+m
).
Proposition 3.3 Consider a sequence {Yi} as defined in Proposition 3.2. Then,the random vector
(Y1, Y1+m
)has unit tail dependence index, for all m ∈ N.
Proof See Appendix 2. �

122 M. Ferreira, L. Canto e Castro
Once again, it can be proved that {Yi} fulfills all requirements of Drees(2003), Theorem 2.1 (see Appendix 1). Therefore, we can state the limitingprocess of the tail empirical q.f. of Yi and hence, the asymptotic normality ofthe tail index Hill estimator, γ (Y)
H .
Proposition 3.4 Let (Y1, Y2, ..., Yn) be a random sample of variables Yi and let{kn} be an intermediate sequence. Then, for the tail empirical quantile functionQn(t) = Yn−[knt]:n, Eq. 25 is valid with
c(x, y) = min(x, y) +p−1∑
m=1
(cm(x, y) + cm(y, x)) + (x + y)cp/γ
(1 − c1/γ
) ,
for p ≡ px,y = [max{γ ln(x/y)/ ln c, γ ln(y/x)/ ln c}] + 1 and
cm(x, y) ={
x , 0 < x ≤ ycm/γ
ycm/γ , ycm/γ < x ≤ 1 + ε.(16)
The expression obtained in c(x, y) allows the calculation of the asymptoticvariance of the Hill estimator (Theorem A.1, Drees 2003, Theorem 2.1).
Proof See Appendix 2. �
3.2 The ARMAXp Case
Motivated by the Ledford and Tawn coefficient of tail dependence (Ledfordand Tawn 1996, 1997), we present a max-autoregressive process involvinga power transformation—ARMAXp—whose parameter c ∈ (0, 1) relates di-rectly with this coefficient (Ferreira and Canto e Castro 2006).
Let {Zi} be an i.i.d. sequence with support in [1, ∞[ and common d.f. FZ .Let {Xi} be an ARMAXp process such that
Xi = max(Xc
i−1, Zi)
, 0 < c < 1, (17)
and {Zi} is independent from {Xi}.The heavy-tailed ARMA processes are usually associated with stationary
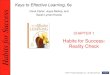
time series exhibiting sudden large peaks. Phenomena like telephone sig-nals and stock market prices are some examples of this kind of data. Asthe MARMA processes (Davis and Resnick 1989), the ARMAXp has alsoanalogous sample paths of ARMA with heavy-tailed noise (see Fig. 1 forillustration) and hence, is an alternative for modeling stationary data withoutlying observations, as well.
The ARMAXp process as defined in Eq. 17 has a stationary d.f. given by,
K(x) = ∏∞j=0 FZ
(x1/c j
), and any solution of equation
K(x) = K(x1/c) FZ (x)
is a stationary d.f. of the ARMAXp process.Based on similar reasonings as used for the ARMAX process we also arrive
to some analogous conclusions. More precisely, we have K ∈ D(Gγ ) for γ > 0

Levels that persist in time 123
0 100 200 300 400 5000
10
20
30
40
50
60
70
80
90
100
0 100 200 300 400 5000
10
20
30
40
50
60
70
80
90
100
Fig. 1 Five hundred observations of the process Xi = max(X0.7
i−1, Zi
)on the left and of the process
Xi = 0.7 Xi−1 + Zi on the right, where innovations Zi � Pareto(0.8).
if the same happens to FZ and the ARMAXp process is also β-mixing, sothat condition D(un) holds for any real sequence {un}. Condition D′′(un) isalso verified for certain normalized levels un of K. The distinguishing featurebetween ARMAX and ARMAXp is the value of the extremal index (θ) sincefor the process ARMAXp it is always unitary (see Ferreira and Canto e Castro2006, 2007 for details).
In the sequel, we always assume that K ∈ D(Gγ ) for γ > 0, i.e., there is someslowly varying function at ∞, LK(x), such that
1 − K(x) ∼x→∞ x−1/γ LK(x), (18)
Since our aim in this work is also the problem of the duration of high valuesin time, and resembling what we made with model ARMAX, we consider asequence {Yi} as defined in Eq. 4, but now, having underlying r.v.’s Xi comingfrom model ARMAXp. Once again, for simplicity, we restrict our study to asequence {Yi} corresponding to levels that persist for two consecutive periodsof time, though we also presume that analogous results are valid for any fixedpositive integer s.
The sequence {Yi} is obviously stationary and β-mixing and hence, conditionD(un) holds for any real sequence {un}.
The sequence {Yi} also verifies condition D′′(un) for a real sequence, {un},such that 1 − K(un) = O(1/n) (Ferreira and Canto e Castro 2006). Neverthe-less, {Yi} has unit extremal index as we shall see in the next proposition. Wewill also show that the tail index of {Yi} (γY ) depends on the parameter c of theprocess ARMAXp, as well as on its tail index.
Proposition 3.5 Let {Yi} be a sequence as defined in Eq. 4 with s = 1 and FY
the common d.f. of {Yi}. Then,
1. FY ∈ D(GγY
)with γY = γ /2 if c ≤ 1/2 and γY = cγ if c > 1/2, where γ is
the tail index of the ARMAXp process {Xi};2. {Yi} has extremal index θY = 1.
Proof See Appendix 2. �

124 M. Ferreira, L. Canto e Castro
Finally, we present a result that establishes the value of Ledford and Tawncoefficient of tail dependence, η, considering the bivariate random vector(Y1, Y1+m
).
Proposition 3.6 Let {Yi} be a sequence as defined in Proposition 3.5. Then, therandom vector
(Y1, Y2
)has tail dependence index, η1 , given by
η1 =
⎧⎪⎨
⎪⎩
2/3 , if c ≤ 1/2
1/(3c) , if 1/2 < c ≤ 1/√
3
c , if c > 1/√
3
(19)
and, for m = 2, 3, ..., the random vector(Y1, Y1+m
)has tail dependence index,
ηm , given by,
ηm ={
1/2 , if c ≤ (1/2)1/m
cm , if c > (1/2)1/m.
Proof See Appendix 2. �Acknowledgements The authors wish to thank the referees for their careful reading and helpfulcomments and criticisms that much contributed to an improvement of the article.
Appendix
1 Tail Empirical Process Under Dependence
Drees (2003) established, for stationary β-mixing time series, the asymptoticbehavior of the tail empirical quantile function (q.f.), Qn(t) := Xn−[knt]:n, where{kn} is an intermediate sequence, that is, a sequence of integers such that kn →∞ and kn/n → 0, as n → ∞. This result is reached considering a weightedapproximation for Qn(t) and the following conditions:
• A regularity condition for the joint tail of (X1, X1+m):
limn→∞
nkn
P(
X1>F−1
(1 − kn
n x)
, X1+m>F−1
(1 − kn
n y) )
= cm(x, y), (20)
for all m ∈ N, 0 < x, y ≤ 1 + ε and F−1 denoting the inverse function of F.• A uniform bound on the probability that both X1 and X1+m belong to an
extreme interval:nkn
P(X1 ∈ In(x, y), X1+m ∈ In(x, y)
) ≤ (y − x)
(ρ(m) + D1
kn
n
), (21)
for all m ∈ N, 0 < x, y ≤ 1 + ε, where D1 ≥ 0 is a constant, ρ(m),m ∈ N, is a sequence satisfying
∑∞m=1 ρ(m) < ∞ and In(x, y) =]F−1
(1 − ykn/n), F−1(1 − xkn/n)].
• A limiting behavior for {kn}lim
n→∞ k1/2n �(kn/n) = 0 (22)

Levels that persist in time 125
• And, for the sake of simplicity,
F−1(1 − t) = dt−γ (1 + r(t)) , with |r(t)| < �(t). (23)
Theorem A.1 (Drees 2003, Theorem 2.1) Under the conditions (20–23) withln = o(n/kn), there exist versions of the tail empirical q.f. Qn and a centeredGaussian process e(·) with covariance function c given by
c(x, y) := x ∧ y +∞∑
m=1
(cm(x, y) + cm(y, x)) ∈ R, (24)
such that
supt∈(0,1]
tγ+1/2(1 + | log t|)−1/2
∣∣∣k1/2
n
(Qn(t)
F−1(1 − kn/n)− t−γ
)− γ t−(γ+1)e(t)
∣∣∣ → 0 (25)
in probability.
Drees (1998a, b) states that almost every estimator of the tail index, γn,based on the kn + 1 largest order statistics can be represented as a smoothfunctional, T, applied to the tail empirical q.f., Qn(t), i.e., γn = T(Qn). Drees(2003) establishes asymptotic normality for this class of estimators under someregularity conditions on T. More precisely, one part of Theorem 2.2 in Drees(2003) states that k1/2
n (γn − γ ) −→ N (0, σ 2T,γ ) weakly with
σ 2T,γ = γ 2
∫
(0,1]
∫
(0,1](st)−(γ+1)c(s, t)νT,γ (ds)νT,γ (dt), (26)
where c is the function defined in Eq. 24 and νT,γ is some signed measure on(0, 1]. It can be shown that the functional related to Hill estimator satisfies theabove mentioned conditions with signed measure
νH,γ (dt) = tγ dt − δ1(dt), (27)
where δ1 denotes the Dirac measure with mass 1 at 1.
2 Proofs
Proof (Proposition 3.2)
1. By hypothesis, we can apply Eq. 3 and hence 1 − H(x) = x−1/γ LH(x), asx → ∞, for some slowly varying function LH(x). That, FY ∈ D(Gγ ) nowfollows from the fact that, by Eq. 14,
1 − FY(x) = 1 − H(x) − H(x)
H(x/c)
(H(x/c) − H(x)
)
∼ 1 − H(x/c). (28)

126 M. Ferreira, L. Canto e Castro
2. Since conditions D(un(τ )) and D′′(un(τ )) both hold for some real sequenceun(τ ), the value of θY can be computed as
θY = limn→∞ P(Y2 ≤ un(τ )|Y1 > un(τ ))
= 1 − limn→∞
P(X1 > un(τ ), X2 > un(τ ), X3 > un(τ ))
P(X1 > un(τ ), X2 > un(τ )). (29)
For the calculations we will need the m-step transition probability function,
Qm(x, ] − ∞, y]) ={
K(y)
K(y1/cm)
, if x ≤ y1/cm
0 , otherwise.(30)
Considering first the numerator in Eq. 29, we obtain,
P(X3 > un, X2 > un, X1 > un)
=∫ ∞
un
∫ ∞
un
P(X3 > un|X2 = x2)Q(x1, dx2)H(dx1)
=∫ ∞
un
∫ ∞
un
Q(x1, dx2)H(dx1) − FZ (un)
∫ ∞
un
∫ un/c
un
Q(x1, dx2)H(dx1)
= 1−H(un)−FZ (un)
∫ un/c
un
H(dx1)−FZ (un)
∫ ∞
un
Q(
x1,]−∞,
un
c
])H(dx1)
+ FZ (un)
∫ ∞
un
Q(x1, ] − ∞, un])H(dx1)
= 1−H(un) − FZ (un)[
H(un
c
)− H(un)
]− FZ (un)FZ
(un
c
)
×[
H(un
c2
)− H(un)
]+ FZ (un)
2[
H(un
c
)− H(un)
].
Analogously, we obtain,
P(X2 > un, X1 > un) = 1 − H(un) − FZ (un)[H( un
c
)− H(un)].
Therefore, as n → ∞,
P(X3 > un, X2 > un, X1 > un)/P(X2 > un, X1 > un)
= 1 − FZ (un)FZ
( unc
)[H( un
c2
)− H(un)]− FZ (un)
2[H( un
c
)− H(un)]
1 − H(un) − FZ (un)[H( un
c
)− H(un)] .
Observing that, as n → ∞, for each nonnegative integer j,
H(un/cj ) − H(un)
1 − H(un)∼ 1 − 1 − H(un/cj )
1 − H(un)= 1 − cj/γ
and, since FZ (un/cj) ∼ 1, we obtain,
θY = 1 −(
1 − c1/γ − c2/γ
c1/γ
)= 1 − c1/γ = θX . �

Levels that persist in time 127
Proof (Proposition 3.3)By Proposition 3.2 and by Eq. 2, we have,
F−1Y (1 − tx) ∼
t↓0x−γ at, (31)
with at = F−1Y (1 − t). Note also that, by Eq. 28,
1 − H(at) ∼ 1 − FY(cF−1
Y (1 − t)) ∼ c−1/γ t. (32)
Applying Eqs. 4 and 31, then
P(Y1 > F−1
Y (1 − tx), Y1+m > F−1Y (1 − ty)
)
= P(X1 > x−γ at, X2 > x−γ at, X1+m > y−γ at, X2+m > y−γ at
)
=∫ ∞
x−γ at
∫ ∞
x−γ at
∫ ∞
y−γ at
Qm−1(x2, dx3)Q(x1, dx2)H(dx1)
−∫ ∞
x−γ at
∫ ∞
x−γ at
∫ ∞
y−γ at
Q(x3, ] − ∞, y−γ at])Qm−1(x2, dx3)
× Q(x1, dx2)H(dx1). (33)
Taking 0 < x ≤ ycm/γ , by Eq. 14 and then by the equality in Eq. 28,
P(Y1 > F−1
Y (1 − tx), Y1+m > F−1Y (1 − ty)
) = 1 − FY(x−γ at) = xt.
If ycm/γ < x ≤ yc(m−1)/γ , applying Eqs. 14 and 32, we have,
P(Y1 > F−1
Y (1 − tx), Y1+m > F−1Y (1 − ty)
)
= 1 − 2H(x−γ at) − H(y−γ at) + H2(x−γ at)
H(
x−γ atc
) + H(x−γ at
)H(y−γ at
)
H(
y−γ at
cm
)
+ H(x−γ at
)H(y−γ at
)
H(
y−γ at
cm+1
) − H2(x−γ at
)H(y−γ at)
H(
x−γ atc
)H(
y−γ at
cm
) ∼ tycm/γ , as t ↓ 0
and, if yc(m−1)/γ < x ≤ 1 + ε, with analogous asymptotic development, weobtain
P(Y1 > F−1
Y (1 − tx), Y1+m > F−1Y (1 − ty)
) ∼ tycm/γ , as t ↓ 0.
In short, for all m ∈ N, and as t ↓ 0,
P(Y1> F−1
Y (1 − tx), Y1+m > F−1Y (1 − ty)
) ∼{
tx , 0 < x ≤ ycm/γ
tycm/γ , ycm/γ < x ≤ 1 + ε.(34)
Using Eq. 10 to compute the function c(x, y) (note that the denominator isobtained by taking x = y = 1 in Eq. 34), then
c(x, y) ={
xc−m/γ , 0 < x ≤ ycm/γ
y , ycm/γ < x ≤ 1 + ε,

128 M. Ferreira, L. Canto e Castro
which is homogeneous of order 1, for any value of m. Hence η = 1, that is,two r.v.’s that are m lags apart, are asymptotically tail dependent for any givenvalue of the model constant c in Eq. 11. �
Proof (Proposition 3.4) The functions cm(x, y) defined in condition (20) can becomputed immediately from Eq. 34, if we just replace t by kn/n and let n → ∞.
If we consider In(x, y) =]F−1Y (1 − ykn/n), F−1
Y (1 − xkn/n)] in Eq. 21,we have,
nkn
P (Y1 ∈ In(x, y), Y1+m ∈ In(x, y))
≤ nkn
[P(X1 ∈ In(x, y), X1+m > F−1
Y (1 − ykn/n))
+ P(X2 ∈ In(x, y), X2+m > F−1
Y (1 − ykn/n))]
≤ nkn
P(X1 ∈ In(x, y), X1 > c−m F−1
Y (1 − ykn/n))
+ nkn
P
⎛
⎝X1 ∈ In(x, y),
1+m⋃
j=2
(cm− j+1 Zk
)> F−1
Y (1 − ykn/n)
⎞
⎠
+ nkn
P(X2 ∈ In(x, y), X2 > c−m F−1
Y (1 − ykn/n))
+ nkn
P
⎛
⎝X2 ∈ In(x, y),
2+m⋃
j=3
(cm− j+2 Zk
)> F−1
Y (1 − ykn/n)
⎞
⎠ .
Because of the independence of the r.v.’s in the sequence {Zi} and theindependence between {Zi} and {Xi}, the last expression can be written as
nkn
{
2
[H(
F−1Y
(1− kn
nx))
− H(
c−m F−1Y
(1− kn
ny))]
+[
H(
F−1Y
(1− kn
nx))
−H(
F−1Y
(1 − kn
ny))]
×[
1−m+1∏
j=2
FZ
(cj−m−1 F−1
Y
(1− kn
ny))]
+[H(
F−1Y
(1− kn
nx))
−H(
F−1Y
(1− kn
ny))]
×[
1−m+2∏
j=3
FZ
(cj−m−2 F−1
Y
(1− kn
ny))]}
.

Levels that persist in time 129
Note that∏m+i−1
j=i FZ (.) ≤ ∏∞j=0 FZ (.) = H(.) by the stationarity deduction for
the distribution H in Eq. 12. If we take into account assumption H ∈ D(Gγ )
and the asymptotic approximation in Eq. 31, some more calculations lead us tonkn
P(Y1 ∈ In(x, y), Y1+m ∈ In(x, y)
)
≤ 2c(m−1)/γ y − 2c−1/γ x + 2c−1/γ (y − x)ykn
n
≤ (y − x)
(2c(m−1)/γ + kn
n2(1 + ε)c−1/γ
), for y ∈ (0, 1 + ε].
Hence Eq. 21 holds with D1 and ρ(m) as stated, since ∑∞m=1ρ(m)=∑∞
m=12c(m−1)/γ isa geometric series with ratio c < 1, hence convergent.
Applying Eq. 16, we have
cm(x, y) + cm(y, x) =
⎧⎪⎨
⎪⎩
x(1 + cm/γ ) , 0 < x ≤ ycm/γ
(y + x)cm/γ , ycm/γ < x ≤ yc−m/γ
y(1 + cm/γ ) , yc−m/γ < x ≤ 1 + ε.
(35)
Observe that cm/γ → 0 and c−m/γ → ∞ as m → ∞. Therefore, for each pair(x, y), it is possible to find an order p ∈ N such that, for all m ≥ p, ycm/γ < x ≤yc−m/γ and so, using Eq. 35, we have that
∞∑
m=1
(cm(x, y) + cm(y, x)) =p−1∑
m=1
(cm(x, y) + cm(y, x)) +∞∑
m=p
(x + y)cm/γ ,
since c < 1. We conclude that c(x, y) in Eq. 24 has the following expression:
c(x, y) = min(x, y) +p−1∑
m=1
(cm(x, y) + cm(y, x)) + (x + y)cp/γ
(1 − c1/γ ), (36)
taking p ≡ px,y as stated above. The variance of Hill estimator is obtained bysubstituting Eq. 36 in Eq. 26 and using Eq. 27. �
Proof (Proposition 3.5)
1. Note that,
1 − FY(y) = P(min(Xi, Xi+1) > y) = P(Xi > y, Xi+1 > y)
and if we apply Eq. 30 and then Eq. 18, we arrive at the followingapproaches:
1 − FY(y) = 1 − 2K(y) + K2(y)
K(y1/c)
∼y→∞ y−2/γ L2
K(y) + y−1/(γ c)LK(y1/c)
∼y→∞
{y−2/γ L2
K(y) , if c ≤ 1/2
y−1/(γ c)LK(y1/c) , if c > 1/2.(37)
Hence, the assertion follows.

130 M. Ferreira, L. Canto e Castro
2. Applying the same reasoning as in the proof of Proposition 3.2.2, we havethat,
P(X3 > un, X2 > un, X1 > un)/P(X2 > un, X1 > un)
= 1 − FZ (un)FZ
(u1/c
n
)[K(u1/c2
n
)− K(un)]− FZ (un)
2[K(u1/c
n
)− K(un)]
1 − K(un) − FZ (un)[K(u1/c
n
)− K(un)] ,
and using the tail approximations of FZ and K given by Eqs. 15 and 18,respectively, we can conclude that both the numerator and the denomi-nator are asymptotically, u−2/γ
n L2K(un) + u−1/(γ c)
n LK
(u1/c
n
), as n → ∞. Then, as
n → ∞, P(X3 > un, X2 > un, X1 > un)/P(X2 > un, X1 > un) ∼ 0 and so,the assertion follows. �
Proof (Proposition 3.6) By Proposition 3.5 and applying Eq. 2, we have,F−1
Y (1 − tx) ∼ x−γY at with at = F−1Y (1 − t).
Therefore, the function c(x, y) defined in Eq. 10, for m > 1, becomes:
c(x, y) = limt↓0
P(Y1 > F−1
Y (1 − tx), Y1+m > F−1
Y (1 − ty))
P(Y1 > F−1
Y (1 − t), Y1+m > F−1
Y (1 − t))
= limt↓0
P(X1>x−γY at, X2>x−γY at, X1+m>y−γY at, X2+m>y−γY at)
P(X1>at, X2>at, X1+m>at, X2+m>at).
(38)
Applying Eq. 30 and after some calculations, we have that,
P(X1 > x−γY at, X2 > x−γY at, X1+m > y−γY at, X2+m > y−γY at
)
= 1 − 2K(x−γY at) − 2K(y−γY at) + K2(x−γY at)
K((x−γY at)1/c
)) + K2(y−γY at)
K((y−γY at)1/c
))
+2K(x−γY at)K(y−γY at)
K((y−γY at)1/cm
)) + K(x−γY at)K(y−γY at)
K((y−γY at)1/cm−1
)) + K(x−γY at)K(y−γY at)
K((y−γY at)1/cm+1
))
− K2(x−γY at)K(y−γY at)
K((y−γY at)1/cm
))K((x−γY at)1/c
)) − K2(x−γY at)K(y−γY at)
K((y−γY at)1/cm−1
))K((x−γY at)1/c
))
− K2(y−γY at)K(x−γY at)
K((y−γY at)1/cm
) )K((y−γY at)1/c
) )− K2(y−γY at)K(x−γY at)
K((y−γY at)1/cm−1
))K((y−γY at)1/c
))
+ K2(x−γY at)K2(y−γY at)
K((y−γY at)1/cm−1
) )K((y−γY at)1/c
) )K((x−γY at)1/c
) ) . (39)
Since 1 − K(.) is −1/γ -regularly varying, then
K(y−γY at) ∼t↓0
1 − yγY /γ (1 − K(at)) (40)

Levels that persist in time 131
and by Eq. 37, we have
1 − K(at)∼⎧⎨
⎩
√1 − FY(at), c ≤ 1/2
1 − FY(act ) , c > 1/2
∼{√
t , c ≤ 1/2
tcL0(1/t), c > 1/2,(41)
for some slowly varying function L0 . Applying Eq. 40 in Eq. 39, the followingapproach holds:
P(X1 > x−γY at, X2 > x−γY at, X1+m > y−γY at, X2+m > y−γY at
)
∼t↓0
yγYcγ(1 − K
(a1/cm+1
t
))+ (xy)2γYγ
(1 − K
(at))4 + (xy)
γYcγ(1 − K
(a1/c
t
))2.
By Proposition 3.5.1 and Eq. 41, it turns out that
P(X1 > x−γY at, X2 > x−γY at, X1+m > y−γY at, X2+m > y−γY at
)
∼t↓0
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
xyt2 , if c < 1/2
xyt2(1 + L1(1/t)) , if c = 1/2
xyt2 , if 1/2 < c < (1/2)1/m
y2t2Lm+1(1/t) + xyt2 , if c = (1/2)1/m
(yt)1/cmLm+1(1/t) , if c > 1/21/m,
where L1 and Lm+1 are slowly varying functions. If we replace x and y by 1 inthe last expression, we also obtain an approach to the denominator in Eq. 38and hence,
c(x, y) =⎧⎨
⎩
xy , if c < (1/2)1/m
y1/cm, if c > (1/2)1/m,
which implies that the tail dependence index, ηm has values 1/2 and cm,respectively. Observe that, the case c = (1/2)1/m depends on the limit ofLm+1(1/t). Therefore, we have c(x, y) = y2 or c(x, y) = (κy2 + xy)/(κ + 1),whenever Lm+1(1/t) → ∞ or Lm+1(1/t) → κ , for some nonnegative constant κ .In this case, c(x, y) is still an homogeneous function of order 2 and hence, theassertion follows.
Now, we are going to calculate the tail dependence index, η1 , for the randomvector (Y1, Y2) along the same steps. Taking m = 1 in Eq. 39 (admit, withoutloss of generality, y < x), we have that
P(X1 > x−γY at, X2 > y−γY at, X3 > y−γY at
)
= 1 − K(x−γY at) − 2K(y−γY at) + K2(y−γY at)
K((y−γY at)1/c
)) + K(x−γY at)K(y−γY at)
K((y−γY at)1/c
))
+ K(x−γY at)K(y−γY at)
K((y−γY at)1/c2
)) − K(x−γY at)K2(y−γY at)
K2((y−γY at)1/c
)) .

132 M. Ferreira, L. Canto e Castro
An analogous procedure, as t ↓ 0, will lead us to
P(X1 > x−γY at, X2 > y−γY at, X3 > y−γY at)
∼ y1
c2γYγ
(1 − K
(a1/c2
t
))+ xγYγ y2
γYγ
(1 − K
(at))3 + y
2c
γYγ
(1 − K
(a1/c
t
))2
∼
⎧⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎩
x1/2 yt3/2 , if c ≤ 1/2
xc y2ct3cL30(1/t) , if 1/2 < c < 1/
√3
y1/ct1/cL2(1/t) + xc y2ct3cL30(1/t) , if c = 1/
√3
y1/ct1/cL2(1/t) , if c > 1/√
3,
where L0 and L2 are slowly varying functions. Hence
c(x, y) =
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
x1/2 y , if c ≤ 1/2
xc y2c , if 1/2 < c < 1/√
3
y1/c , if c > 1/√
3,
and so, η1 = 1/2, η1 = 3c and η1 = 1/c, in each case, respectively. If c = 1/√
3,
then c(x, y) = y√
3 or c(x, y) =(λy
√3 + x1/
√3 y2/
√3)
/(λ + 1) (λ ≥ 0 constant),
according to L1(1/t)/L30(1/t) → ∞ or L1(1/t)/L3
0(1/t) → λ, respectively, and
hence c(x, y) is homogeneous of order√
3. Therefore, Eq. 19 holds. �
References
Alpuim, M.T.: Contribuições à teoria de extremos em sucessões dependentes. Ph.D. thesis, FCUL(1989)
Canto e Castro, L.: Sobre a teoria assintótica de extremos. Ph.D. thesis, FCUL (1992)Davis, R., Resnick, S.: Basic properties and prediction of max-ARMA processes. Adv. Appl.
Probab. 21, 781–803 (1989)de Haan, L., Resnick, S.I.: Second order regular variation and rates of convergence in extreme
value theory. Ann. Probab. 24, 97–124 (1997)de Haan, L., Stadtmuller, U.: Generalized regular variation of second order. J. Aust. Math. Soc.
(Series A) 61, 381–395 (1996)Dekkers, A.L.M., de Haan, L.: Optimal choice of sample fraction in extreme value estimation.
J. Multivar. Anal. 47, 173–195 (1993)Draisma, G.: Duration of extremes at sea. In: Parametric and Semi-parametric Methods in E. V. T.,
pp. 137–143. Ph.D. thesis, Erasmus, University (2001)Draisma, G., Drees, H., Ferreira, A., de Haan, L.: Bivariate tail estimation: dependence in asymp-
totic independence. Bernoulli 10, 251–280 (2004)Drees, H.: On smooth statistical tail functionals. Scand. J. Statist. 25, 187–210 (1998a)Drees, H.: A general class of estimators of the extreme value index. J. Stat. Plan. Inference
66, 95–112 (1998b)Drees, H.: Extreme quantile estimation for dependent data with applications to finance. Bernoulli
9, 617–657 (2003)

Levels that persist in time 133
Ferreira, M., Canto e Castro, L.: Contributos para o estudo da ocorrência prolongada notempo de níveis extremos. In: Canto e Castro, L. et al. (eds.) Ciência Estatística, Proceed-ings of the XIII Annual Conference of the Portuguese Statistical Society, Edições S.P.E.,pp. 365–376 (2006)
Ferreira, M., Canto e Castro, L.: Comportamento extremal de um modelo max-autorregressivo edos respectivos níveis que persistem durante um período de tempo fixo. In: Ferrão, E. et al.(eds.) Estatística: Ciência Interdisciplinar, Proceedings of the XIV Annual Conference of thePortuguese Statistical Society, Covilhã—Portugal, (2007)
Geluk, J., de Haan, L.: Regular Variation, Extensions and Tauberian Theorems. CWI Tract.40 Center for Mathematics and Computer Science, P.O. Box 4079, 1009 AB Amsterdam,The Netherlands (1987)
Leadbetter, M.R., Lindgren, G., Rootzén, H.: Extremes and Related Properties of RandomSequences and Processes. Springer, New York (1983)
Leadbetter, M.R., Nandagopalan, S.: On exceedance point processes for stationary sequencesunder mild oscillation restrictions. In: Hüsler, J., Reiss, R.-D. (eds.) Extreme Value Theory,pp. 69–80. Springer (1989)
Ledford, A., Tawn, J.A.: Statistics for near independence in multivariate extreme values.Biometrika 83, 169–187 (1996)
Ledford, A., Tawn, J.A.: Modelling Dependence within joint tail regions. J. R. Stat. Soc. B 59,475–499 (1997)
Watson, G.S.: Extreme values for approximate independence of largest and smallest orderstatistics. J. Am. Stat. Assoc. 65, 860–863 (1954)