Embed Size (px)
Citation preview


Symmetry of Interpersonal Rhythmic Coordination: The Case of a Three-Person Drumming
Task
A dissertation submitted to the
Graduate School
of the University of Cincinnati
in partial fulfillment of the
requirements for the degree of
Doctor of Philosophy
in the Department of Psychology
of the McMicken College of Arts and Sciences
by
Kris Ariyabuddhiphongs
M.S. Illinois State University, 2011
February 2017
Committee Chair: Rachel W. Kallen, Ph.D.
Committee: Michael J. Richardson, Ph.D.
Michael A. Riley, Ph.D.

ii
Abstract
The mathematical theory of symmetry provides a framework to understand higher order
structures of behavioral organization across various contexts; the same principle that explains the
organization of quadruped gaits can also be applied to behavioral coordination in interpersonal
contexts. The current studies examined how symmetries of perceptual coupling and social
information influenced interpersonal coordination during a three-person drumming task. In Study
1, triads of participants performed a drumming task without explicit instructions to coordinate;
each participant drummed to given metronome beats for 10 seconds and maintained his or her
rhythm for the rest of the trial. Half of the 24 triads drummed at 60 bpm, and the other drummed
at 45 bpm. Each triad performed the task under five auditory coupling conditions: the all-,
rotation-, partial-, clamped-, and no-coupling conditions. During the task, participants could hear
but not see each other’s drumming. The results showed that when coupling was present, the
spontaneous coordination mode that emerged tended to be inphase. Regardless of drumming
frequency, coordination in the all- and clamped-coupling conditions was more stable than in the
partial-coupling conditions, indicating the effect of asymmetric coupling functions. In addition,
period shifts were observed in the 45-bpm all-, rotation-, and clamped-coupling conditions. In
Study 2, the minimal group paradigm was used to manipulate the symmetry of social identity
among a triad. Fifteen triads were assigned to the heterogeneous condition, where two
participants were in the minimal ingroup—the red group—and one in the minimal outgroup—the
blue group. The other 14 triads were in the homogeneous condition (i.e., the control group) with
all of them assigned to the red group. Beside the minimal group manipulation, there was no
constraint on either visual or auditory information in Study 2. The participants first performed
the drumming task without explicit instructions to coordinate (i.e., spontaneous coordination

iii
task) and, then, with explicit instructions to coordinate in a partial-inphase pattern (two
participants inphase with each other and the third antiphase relate to the other two). The results
showed that asymmetric minimal group identity had no effect on the spontaneous or explicit
coordination. Plausible explanations for the null effects are discussed.

iv

v
Acknowledgements
First and foremost, I would like to thank my advisors and dissertation committees, Dr.
Rachel Kallen, Dr. Michael Richardson, and Dr. Michael Riley, for their invaluable advice,
insight, knowledge, and generous patience in the development and completion of this
dissertation. I would also like to thank my research assistants, Eduardo J. Rivera Pichardo and
Dalton Bettendorf, for their contribution during the data collection phase. I greatly appreciate my
friends and colleagues for their help on the participant recruitment and for their continuous
support and feedback on the project. To my partner and family, I am thankful for your endless
love and understanding during this journey. Lastly, I would like to express my gratitude to
Chulalongkorn University for their scholarship program and to all staffs at OEADC for their
fantastic assistance throughout these years.
This research was supported by Seeman Research Fund, Department of Psychology,
University of Cincinnati and the National Institutes of Health (R01MH094659).

vi
Table of Contents
List of Tables .............................................................................................................................. viii
List of Figures ............................................................................................................................... ix
Chapter 1: Introduction ............................................................................................................... 1
Interpersonal Rhythmic Coordination ................................................................................. 5
Synchrony in Social Contexts: Its Function and Constraints .............................................. 8
Symmetry of Nonlinear Coupled Oscillators .................................................................... 10
Interaction-Dominant Dynamical Systems ....................................................................... 17
The Current Studies .......................................................................................................... 20
Chapter 2: Study 1 ...................................................................................................................... 29
Overview ........................................................................................................................... 29
Participants ........................................................................................................................ 29
Instruments ........................................................................................................................ 29
Procedure .......................................................................................................................... 30
Data Preparation, Reduction, and Analysis ...................................................................... 32
Results ............................................................................................................................... 35
Discussion ......................................................................................................................... 48
Chapter 3: Study 2 ...................................................................................................................... 52
Overview ........................................................................................................................... 52
Participants ........................................................................................................................ 52
Instruments ........................................................................................................................ 52
Procedure .......................................................................................................................... 55
Data Preparation, Reduction, and Analysis ...................................................................... 56

vii
Results ............................................................................................................................... 58
Spontaneous Drumming Task ............................................................................... 58
Explicit Drumming Task: Partial-Inphase ............................................................ 59
Questionnaire ........................................................................................................ 62
Discussion ......................................................................................................................... 63
Chapter 4: General Discussion .................................................................................................. 65
Asymmetric Informational Coupling Constraints ............................................................. 65
Drumming Frequency ....................................................................................................... 68
Social Constraints ............................................................................................................. 69
Limitations & Future Research ......................................................................................... 72
References .................................................................................................................................... 74

viii
List of Tables
Table 1. Estimated marginal means of average periods and period instability for Study 1 ......... 37
Table 2. Number of time series pairs categorized as different phase modes for Study 1 ............ 44
Table 3. Estimated marginal means of coordination stability (r) for Study 1 ............................. 47
Table 4. Estimated marginal means of average periods and period instability for Study 2 ......... 60
Table 5. Estimated marginal means of coordination stability (r) for Study 2 ............................. 61
Table 6. Frequency of total chosen drumming roles during the explicit partial-inphase drumming
task for Study 2 ............................................................................................................................. 62
Table 7. Means of liking, similarity, and perceived coordination of ingroup and outgroup targets
for Study 2..................................................................................................................................... 63

ix
List of Figures
Figure 1. Schematic representation of the coupling configurations in Study 1 ........................... 24
Figure 2. Mean period for Study 1 ............................................................................................... 38
Figure 3. Mean period for the partial- and the clamped-coupling conditions for Study 1 ........... 40
Figure 4. Mean period stability (coefficient of variation) for Study 1 ......................................... 41
Figure 5. Mean frequency distribution of relative phase for Study 1 .......................................... 45
Figure 6. Mean coordination stability (r) for Study 1 ................................................................. 46
Figure 7. Mean coordination stability (r) in the partial-coupling condition for Study 1 ............ 48
Figure 8. Mean frequency distribution of relative phase for the spontaneous drumming task in
Study 2 .......................................................................................................................................... 59
Figure 9. Mean frequency distribution of relative phase for the explicit drumming task in Study
2..................................................................................................................................................... 61

1
Chapter 1
Introduction
Social behavior is rich with order and patterns. From unintentionally running in step with
a stranger to forming complex social networks, social scientists seek to identify and explain the
origins of patterns in social interactions. The question has been tackled from various approaches
and perspectives, ranging from neurocognitive investigations of joint actions (e.g., Hommel,
Müsseler, Aschersleben, & Prinz, 2001; Iacoboni et al., 2005), to computational models of social
cognition and personality systems (e.g., Mischel & Shoda, 2008; Read et al., 2010), to
dynamical complex systems explorations of social interactions (e.g., Eiler, Kallen, Harrison, &
Richardson, 2013; Schmidt, Fitzpatrick, Caron, & Mergeche, 2011). Despite any discrepancies
between these theoretical approaches, they all share the same essential overarching question,
“how do order and patterns in social interaction come to be?”
Within the broader domains of mathematics and science, the concepts of symmetry and
symmetry breaking were proposed as a unifying framework to analyze how order arises in nature
(Curie, 1894; Golubitsky & Stewart, 2003; Rosen, 1995). In a physical system, such as
Rayleigh–Bénard convection, the emergence of convection is a result of symmetry-breaking
bifurcation. At room temperature, molecules of oil in a pan move at random in a disorderly, yet
symmetrical state. The system is symmetrical because it is invariant to any transformation; no
matter how molecules are exchanged within the liquid, the system still looks the same. When the
liquid is heated from underneath and passes a critical temperature gradient (i.e., the difference in
temperature between the top and bottom of the preparation), random molecular movement no
longer efficiently dissipates energy. Instead, convection offers better heat dissipation, where hot
molecules rise up to cool down at the surface and cool molecules move down and retake energy.

2
During the critical point when the system makes a transition from random movement to orderly
convection, small fluctuations in molecular movement may cause the system to adopt the first
convection in either a clockwise or counterclockwise direction. Once the symmetry is broken and
the convection is formed, the direction of the rest of the convections are now constrained and
determined.
In biology, bilateral symmetry (i.e., left-right symmetry) is commonly found in animals.
The symmetry on the lateral plane results in symmetrical limbs that enable legged locomotion.
On the other hand, asymmetry on the transverse plane results in the anterior and posterior ends of
the body (i.e., front and rear) that provide an organism the primary movement direction. In other
words, asymmetry in animal locomotion results from asymmetry in anatomy. At the behavioral
level, the principle of symmetry can also be used to explain complex motor coordination
patterns, such as animal gaits (Collins & Stewart, 1993; Turvey, 1990), rhythmic movement (Yu,
Russell, & Sternad, 2003), and interpersonal coordination (Richardson et al., 2015; Yokoyama &
Yamamoto, 2011). Similarly, at the societal level, slight asymmetry in individuals’ preferences
to live in the neighborhood with those who share the same race/ethnicity may result in racial
segregation according to Schelling’s model (1971). In sum, “when certain effects show a certain
asymmetry, this asymmetry must be found in the causes which gave rise to it” (Richardson &
Kallen, 2016, p. 229; translated from Curie, 1894).
While some human behaviors are complex and irregular, many behaviors are rhythmic
and symmetrical. Some of these rhythms involve our body and the environment, such as walking
or sleeping; some involve the use of tools, such as hammering a nail or weaving cloth; and some
involve other agents, such as taking turns in a conversation or playing Frisbee. In repetitive
behavior, each component of a system (e.g., a leg in walking or an individual in coordination)

3
can be modeled as a nonlinear oscillator (e.g., Collins & Stewart, 1993; Kelso, 1984; Schmidt,
Bienvenu, Fitzpatrick, & Amazeen, 1998). However, if the components are independent of each
other, there is no order apparent in the collective behavior level of the system; two legs moving
at different frequencies do not produce stable gaits and two individuals talking at the same time
do not carry a conversation. Instead, collective order emerges when the components interact with
each other and become coordinated. Hence, the system is more than a sum of its parts. The extent
to which each oscillator influences each of the other oscillators is a function of the degree of
coupling between each of them. Coupling constraints and the intrinsic dynamics of the oscillators
determine the whole system’s dynamics and its coordination patterns. If the oscillator’s intrinsic
frequencies are identical or similar, then the symmetry of the coordination is determined by the
symmetry of the coupling (Strogatz & Stewart, 1993). Golubitsky and Stewart (1985, 1986)
developed the group theory of symmetric Hopf bifurcation, which explains how different
symmetries of coupling functions in a ring of n nonlinear oscillators result in complex behavioral
coordination, such as patterns and transitions of quadrupedal gaits. Again, asymmetry found in
the collective, global behavior of the system can be traced to asymmetry of the coupling of the
oscillators, one of the primary constraints that shapes the coordinated behavior of the system.
How might the symmetry framework be applied to the study of social behavior?
Traditional social psychology usually posits a linear, component-dominant explanation (e.g.,
Adolphs, 2009; Ajzen, 1991; Gilbert & Malone, 1995; Kelley & Michela, 1980; but see also
Tesser, McMillen, & Collins, 1997). For example, social cognitive processes, realized by
specific neurocognitive component mechanisms, are an intermediary between the social input
and the behavioral output. Situational and dispositional factors are weighted and summed in the
course of these processes to determine an individual’s behavior. In a similar way, group behavior

4
is a sum of each member’s behavior. Because the linear model of behavior by itself does not
often produce complex behavior, the order of social coordination must be originated by some
pre-planned, organized processes—coordinated behavior is attributed to a component that
produces coordination.
On the other hand, the dynamical systems approach and the theory of symmetry suggest
that behavioral coordination can be self-organized, whereby in the absence of a central planner,
order emerges as an inevitable consequence of nonlinear interactions among components and the
stability of the system as a whole. Instead of positing social cognition as a direct causal
explanation of behavioral patterns, social cognition rather acts as constraints on the dynamics of
the agent-(agent-)environment interactions. Social cognition brings about new patterns by
breaking symmetries of the system. In other words, social behaviors are not always a product of
downward causation from cognitive processes, but an emergent phenomenon from nonlinear
interactions between components under physical, cognitive, and social constraints. Slower time
scale dynamics, such as social attitudes, constrain faster time scale group-level behavioral
dynamics that emerge as a result of interactions between even faster dynamics of individuals.
The emergent behavior exerts its influence upward to the slower timescale dynamics via the self-
organizing process by either sustaining or perturbing the existing constraints. By adopting this
interaction-dominant perspective (Eiler et al., 2013; Jensen, 1998; Van Orden & Holden, 2002),
one can appreciate the nature of circular causality and nonlinearity between social situations,
social cognition, and social behavior.
The current studies aim to demonstrate the usefulness of the symmetry framework in
explaining spontaneous, self-organized rhythmic coordination during a three-person drumming
task. A group of three oscillators presents an opportunity for a variety of behavioral patterns at a

5
manageable level for interpersonal experiments. The first study investigated whether different
patterns of coordination emerged as a result of asymmetry in informational coupling between
individuals. The second study was designed to investigate whether (minimal) asymmetries in
social group membership can impact the coupling between individuals and, consequently, the
patterns of coordination. Asymmetry in a slower timescale process of group membership was
predicted to modulate interpersonal coupling of rhythmic coordination and result in asymmetry
in behavioral patterns.
Interpersonal Rhythmic Coordination
Surprisingly, interpersonal coordination or joint actions did not receive much attention
from mainstream social psychological scientists until recently. Many pioneers in this area of
study came from the field of motor control, developmental psychology, and ecological
psychology. While many lines of research adopt the representational approach, including the
theory of common coding (Hommel et al., 2001), action simulation (Decety & Chaminade,
2003), shared attention (Tomasello & Carpenter, 2007), or shared intention (Knoblich & Sebanz,
2008), research from the ecological approach focuses on behavioral entrainment between
‘intentional-blind’ individuals. Studies in this line of research have suggested that individuals
can become spontaneously (i.e., unintentionally) synchronized without any explicit plans or
instructions (Richardson, Marsh, Isenhower, Goodman, & Schmidt, 2007; Richardson, Marsh, &
Schmidt, 2005; Shockley, Richardson, & Dale, 2009). In other words, spontaneous interpersonal
coordination is a self-organized process.
To say that spontaneous synchronization is a self-organized process is to say that it
occurs without a plan or central control. Biologists have documented spectacular spontaneous
synchronization in animals, such as fireflies flashing in perfect synchrony when in a line of

6
mangrove trees stretched over a river front in South East Asia (Buck & Buck, 1976) or migrating
birds flapping their wings in synchrony when they travel in a V-formation (Muijres & Dickinson,
2014). There is no firefly or bird ‘conductor’ that orchestrates such phenomena, nor is there a
blueprint or plan that they follow. Rather, each individual animal is itself an oscillator interacting
nonlinearly with other oscillators under a particular task constraint. Fireflies flash together
because their sensorimotor systems are sensitive to other firefly’s flashes as a part of their mating
behavior. The birds fly in a V-shape formation and flap their wings synchronously to reduce
energy expenditure during their long migration. A skeptic perhaps would argue that those
animals are hard wired for synchrony and that the self-organization principle is not applicable to
the behavior of complex animals like humans. However, for example, on the opening day of the
London Millennium Bridge in 2000, the crowded pedestrians walked side-to-side in lockstep as
they crossed the bridge. This perplexing phenomenon occurred because the bridge wobbled from
side to side. This lateral movement of the bridge destabilized pedestrians’ regular walking
pattern and forced them to balance themselves by walking side-to-side. As more and more
people walked in this fashion, they unintentionally amplified the lateral sway of the bridge,
which further destabilized the regular walking pattern and forced all pedestrians to walk side-to-
side in lockstep with the bridge’s sway (Macdonald, 2008, 2009; Strogatz, Abrams, McRobie,
Eckhardt, & Ott, 2005). This kind of positive feedback loop between an emergent collective
behavior and its constraints on the system’s components is the essential mechanism of any self-
organized phenomenon. Given the boundary conditions for the systems described above, the self-
organization of spontaneous synchrony emerged as a stable solution of the system’s behavioral
dynamics.

7
In human coordination, the dynamical, self-organization approach has successfully
explained both intra- and interpersonal spontaneous synchrony. For example, the HKB model
predicts stable patterns and phase transition of coordination between two limbs as a function of
oscillation frequency (Haken, Kelso, & Bunz, 1985; Kelso, 1984). For instance, as the frequency
increases, the oscillatory coordination between two index fingers changes from an antiphase
pattern (i.e., one oscillator is moving a half a period out-of-sync with the other) to an inphase
pattern (i.e., both oscillators are moving in synchrony). The coordination is possible because our
limbs are coupled via the haptic and neuromuscular systems, which allows the limbs to influence
each other. At the abstract level, the system consists of (a) nonlinear oscillators interacting via
(b) some coupling mechanisms under (c) a task constraint. A generalization of intrapersonal limb
coordination to the interpersonal case can be made by replacing the haptic connections between
limbs with visual coupling. In fact, Schmidt, Carello, and Turvey (1990) found that interpersonal
limb coordination of two individuals swinging one of their legs side by side also conformed to
the same dynamical principles that govern intrapersonal limb coordination (also see Schmidt &
O'Brien, 1997; Schmidt & Richardson, 2008; Schmidt & Turvey, 1994, for a review) As the
frequency of leg swings increased, the antiphase coordination between the two individuals
became unstable, and inphase coordination emerged as a stable solution instead. However, the
perceptual information required for interpersonal coupling depends on the task. For instance,
Richardson et al. (2007) demonstrated that emergence of synchrony between participants on a
rocking chair was determined by participants’ attention and degree to which they detected visual
information. The participants who were asked to fix their gaze on their co-actor’s chair showed a
greater degree of synchrony and stability. On the other hand, in an auditory-based task like
rhythmic drumming, visual information was less crucial for interpersonal coupling

8
(Ariyabuddhiphongs & Richardson, 2015, April)—individuals were able to drum and coordinate
with others on the instructed patterns whether they could see other person drumming or not. In
sum, although the nature of interaction and coupling vary with the system in question, the same
self-organization principle that explains the emergence of order in physical and biological
systems can also be applied to interpersonal systems.
Synchrony in Social Contexts: Its Function and Constraints
The ubiquity of synchrony in nature has led many theorists to speculate about its
functional value. On one hand, entrainment can be a solution to accomplish a task at hand, such
as stabilizing oneself while crossing the swaying Millennium Bridge. On the other hand, our
ability to imitate and synchronize with others is thought to be a fundamental building block of
social coordination (Chartrand, Maddux, & Lakin, 2005; Gallese & Goldman, 1998; Iacoboni,
2009; Schmidt & Richardson, 2008). Although synchrony itself does not require a biological
basis (e.g., inanimate objects such as metronomes placed on a movable platform can become
synchronized), biological systems successfully build upon this entrainment tendency to open new
possibilities for behavior. For instance, rhythmic contraction of the body at different regions can
allow an organism to move around. Once locomotion is possible, the organism can find food and
escape predators. In other words, the emergent behavior of an autocatalytic system, such as an
organism, allows the system to be ‘about’ the context from which the behavior emerges (Jordan
& Ghin, 2006). Entrainment opens new possibilities for affordance beyond a mere covariation in
movement.
In humans, the tendency for entrainment enables us to imitate and synchronize our
behavior with others. Sharing bodily states with others may enable us to feel what others feel and
develop empathy (Gallese, 2003; Meltzoff, 2007). In addition, by being in the same behavioral

9
dynamics with others, one can experience what the behavior is about and gain insight to others’
intentions (Goldman, 2006). More than other species, humans are concerned with others’
intentions (Adolphs, 2009; Buckner & Carroll, 2007; Herrmann, Call, Hernàndez-Lloreda, Hare,
& Tomasello, 2007; D. Premack & Woodruff, 1978; cf. Premack, 2010). Horner and Whiten
(2004) found that 3- to 4-year-old children imitated both the relevant and irrelevant behavior of a
demonstrator solving a puzzle. On the other hand, young chimpanzees only imitated the relevant
behavior in order to achieve the goal. Horner and Whiten argued that even though children at this
age were capable of identifying relevant causal information, the prevalence of their imitation
suggested that their predominant focus was on the actions and intentions of the demonstrator.
Many researchers also argued that our ability to entrain to or match others’ behavior facilitates
affiliation, cooperation, and social exchanges (Lumsden, Miles, Richardson, Smith, & Macrae,
2012; van Baaren, Janssen, Chartrand, & Dijksterhuis, 2009). Studies have shown that
behavioral synchrony was associated with cooperation (Valdesolo, Ouyang, & DeSteno, 2010;
Wiltermuth & Heath, 2009) and rapport (Miles, Nind, & Macrae, 2009). In sum, certain aspects
of social cognition are rooted in our ability to coordinate with others.
On one hand, behavioral coordination, such as synchrony, is thought to be a foundation
of our complex social cognition. On the other hand, synchrony is an emergent behavior that can
be constrained by social cognitive processes. For example, individuals with prosocial orientation
were more likely to coordinate with others (Lumsden et al., 2012). When being assigned into
different minimal groups, dyads were more likely to move in synchrony (Miles, Lumsden,
Richardson, & Macrae, 2011). A strong social distress like ostracism prompted individuals to
seek affiliation by mimicking others (Lakin, Chartrand, & Arkin, 2008). Also, when facing a
disliked other (Stel et al., 2010) or one with inappropriate behavior (e.g., being late, Miles,

10
Griffiths, Richardson, & Macrae, 2010), participants were less inclined to mimic or coordinate
with the unlikable other than with a likable one. Taken together, the evidence suggests that
interpersonal coordination is not only constrained by physical properties of the task but also by
the social environment and social cognitive contents.
How does social cognition influence behavioral dynamics, such as synchrony, that seem
to be fully defined by dynamical rules? The symmetry approach to this question suggests that
social influences create asymmetry in the system of nonlinear coupled oscillators by either
modifying their coupling functions or intrinsic dynamics. The group theory of symmetry
provides a general framework for analyzing such coordination.
Symmetry of Nonlinear Coupled Oscillators
Formally defined, the symmetry of an object refers to properties of the object that are
invariant with respect to a given transformation. For example, a geometric shape like a square
can be rotated in any multiple of 90°, and the square will still look the same. Under this
particular transformation, the object is invariant; all rotated squares in these particular angles are
equivalent. However, a square is not invariant with respect to, say, a 45° rotation or to color
transformation. In the case of oscillators, the state of the system can be described with two types
of symmetry: spatial and temporal. If the state of oscillator i at time t is represented by a vector
variable oi t , the state of a system of n oscillators is
o t =(o1 t ,o2 t ,o3 t ,...,on t ). (1)
If the oscillators are synchronized inphase, their states are identical. In that case, the system is
spatially symmetrical as you can swap any oscillators with each other in any permutation, and
the system will still look the same, that is,
o1 t = o2 t =o3 t =...on t ), (2)

11
and, for instance,
(o1 t ,o2 t ,o3 t ,...,on t ) = (o3 t ,o2 t ,o1 t ,...,on t ). (3)
In other words, inphase synchrony is invariant to spatial transformation or the change of an
oscillator’s position in the system.
Temporal symmetries deal with transformation regarding time, such as a phase shift. For
example, if two oscillators are moving antiphase at a period T, the second oscillator will be half a
period (T/2) away from the first oscillator. Thus,
o1 t = o2 t+T/2 . (4)
In order to achieve the spatial symmetry again, one oscillator must be shifted by half a period.
The temporal symmetry only occurs when the system exhibits some kinds of phase-locked
behavior.
In dynamical systems theory, the Hopf bifurcation theorem describes how limit cycles or
periodic states arise from a stable steady state as the system’s control parameters vary. However,
the standard Hopf bifurcation cannot be applied to dynamical systems with symmetry because
simple imaginary eigenvalues may not occur (Golubitsky, Stewart, & Schaeffer, 1988).
Golubitsky and Stewart (1985) developed a general theory of spatiotemporal symmetry in a
symmetric network of nonlinear oscillators undergoing Hopf bifurcation. The symmetric Hopf
bifurcation theorem suggests that oscillation patterns of a ring of n coupled nonlinear oscillators
can be predicted in terms of its symmetry, without investigating the detailed dynamical
equations. Hence, the general theory can be applied to different dynamical systems with different
makeup.
For a ring of n coupled oscillators, the three common symmetry groups are as follows
(Golubitsky et al., 1988). First, the symmetric group Sn involves all permutation of n objects. All

12
oscillators are identically coupled to each of the other oscillators. In a larger network, this
formation creates a star-like configuration. Second, the dihedral group Dn describes the
symmetry of n-sided polygons. The oscillators are coupled to the two nearest neighbors. Hence,
any oscillators are bidirectionally coupled to their adjacent neighbors. For a system of three
coupled oscillators, S3 = D3. Third, the cyclic group Zn is the symmetry group for a directed n-
sided polygon. The coupling between each oscillator is unidirectional.
In the case of two coupled oscillators, which are typically investigated in interpersonal
synchrony research, there are two behavioral solutions to the system: inphase and antiphase
patterns (under some circumstances, a four-phase pattern is also possible, Katsuta & Kawakami,
2006). As the number of oscillators in the system increases, more and more symmetries become
possible and the system may exhibit even more complex behavior. For the purpose of the current
studies, only the case of a three-oscillator ring will be considered. The system has two types of
symmetry: the dihedral D3 and the cyclic Z3. The cyclic symmetry has three isotropic subgroups.
As a result, four oscillation patterns are predicted by the symmetric Hopf bifurcation.
1. The all-inphase pattern preserves D3 symmetry. All three oscillators, o, have
identical waveforms and are inphase, that is,
o1 t = o2 t =o3 t . (5)
2. The rotation pattern is described by an isotropic subgroup Z3. All oscillators have
identical waveforms and are phase-shifted by 1/3 of a cycle (note that a cycle is 2π).
If o1 t =A, then (6)
o2 t =A+ 2π3
, and (7)
o3 t =A+ 4π3
. (8)

13
3. The partial-inphase pattern occurs in an isotropic subgroup Z2 K . Two oscillators
are identical and move inphase, and the third oscillator has a different waveform and
moves out of phase with the others. That is,
o1 t = o2 t =A, and (9)
o3 t =B, where B is out of phase with A. (10)
One special case of this pattern is when two oscillators move inphase and the other
moves antiphase.
4. The half-period pattern shows a 2:1 phase-locking symmetry of an isotropic
subgroup Z2 K, π . In this pattern, two oscillators have identical waveforms but are
phase-shifted by half a period (i.e., antiphase), while the third one oscillates at twice
the frequency of the first two, which can be described as
o1 t = A, (11)
o2 t =A+ π, and (12)
o3 t =B, where B=B+π. (13)
In addition to the behavioral patterns, the symmetry groups imply different coupling
configurations among the three oscillators. The D3 symmetry implies that all oscillators have
bidirectional coupling between each of them. The Z3 symmetry implies the cyclical
unidirectional coupling among the oscillators. The Z2 K symmetry suggests that two oscillators
are coupled and the third one is uncoupled from those two. The 2:1 phase-locking of Z2 K, π
suggests that the higher-frequency oscillator is driven by the antiphase coordination of the other
two. By manipulating the coupling among the oscillators, one should be able to induce symmetry
breaking in the system and observe an emergence of the predicted patterns.

14
Experiments with real biological systems support the emergence of the patterns predicted
by the symmetry groups. A ring of three plasmodial slime mold colonies exhibited protoplasmic
streaming oscillation in three modes: rotation, partial-inphase, and half-period oscillation
(Takamatsu et al., 2001). In humans, Yokoyama and Yamamoto (2011) studied a system of three
soccer players in a 3 versus 1 ball-possession task and found that two prominent patterns
emerged during this interaction: The rotation and the half-period patterns (or as they called it the
partial-antiphase pattern). Moreover, in a three-person drumming task, participants could
intentionally generate all of the four patterns described in the symmetric Hopf bifurcation
(Ariyabuddhiphongs & Richardson, 2015, April). Because symmetry breaking of coupled
nonlinear oscillators is a result of changes in their coupling function (Strogatz & Stewart, 1993),
it is possible that participants achieved coordination by perceptually or attentionally modulating
coupling strength. By doing so, participants in the drumming task could exploit dynamical
stability resulting from symmetry constraints to achieve stable coordination.
Social Influences as Symmetry Breaker
How does the symmetry of coupled oscillators relate to social phenomena? As Curie’s
(1894) principle suggests, symmetry of symmetry-breaking effects must be found in the
symmetry of causes that give rise to the effect. In the three-person drumming task described
above (Ariyabuddhiphongs & Richardson, 2015, April), the symmetry breaking occurred as a
result of explicit instructions to the participants. The task constraint was an apparent cause of
symmetry breaking in that case. However, it is less obvious how other social influences would
cause symmetry breaking. One plausible explanation is that social factors break the symmetry of
the system by changing how its components are coupled. Instead of directly modeling social
factors as extra parameters of task dynamics, one may adopt a model in which social factors

15
operate at a higher level by modulating parameter dynamics (e.g., influencing how coupling
functions change), which in turn control the lower-level task (state) dynamics. In terms of
hierarchy, social influences can be the slower timescale dynamics that constrain the cognition-
perception-action system, which, in turn, constrains the task behavior. Because the relation
between each hierarchy of the system is nonlinear (Van Orden & Holden, 2002), one can expect
that social influences do not always translate one-to-one to behavior. For example, when an
individual is in the same room with another unlikable person, reduced affiliative motives might
lead the first individual to pay less attention to the second person, resulting in weak coupling
between them, and, hence, less spontaneous coordination. However, if the task constraints are
strong (e.g., the participants were explicitly asked to coordinate), social influences might not be
able to resist the attraction of synchronicity. In such a case, the attractor landscape of the
behavioral dynamics would be dominated by the task parameters rather than social influences. In
other words, social factors may not always directly cause behavior. Rather, they should be
understood as cascades of influences among nested system hierarchies.
Contemporary approaches in social psychology posit that perception of social stimuli
activates associated behavioral tendencies, mostly in the form of imitation or behavioral
resonance (Bargh & Chartrand, 1999; Dijksterhuis & Bargh, 2001). The automaticity of
perception-behavior links has been supported by evidence from behavioral priming research. For
example, after taking an ostensible language test with words related to stereotypes of the elderly,
participants walked slower down the hallway after the experiment (Bargh, Chen, & Burrows,
1996). In social interaction, Chartrand and Bargh (1999) found that individuals unconsciously
mimicked the behavior of a confederate who was in the same room. Also, participants who
received high-power primes tended to write a letter E on their own forehead from their own

16
perspective (i.e., a mirrored E from an observer’s viewpoint), but those who received low-power
primes wrote the letter on their forehead from others’ perspective (i.e., a normal E from an
observer’s viewpoint). From the symmetry theory standpoint, the primes might work by creating
asymmetry in social cognitive contents, so that they constrained the behavior as it unfolded
within the task context. As the activation of power-related concepts increased to the symmetry-
breaking point, the writing behavior switched from one mode to another. However, social
cognitive contents, such as primed thoughts, did not directly dictate the behavior. Specifically,
the power prime by itself did not cause people to become poor perspective takers. Rather, such
effects emerged in the nested task context that demanded perspective tasking. On the contrary,
power, in a different context like an interview, could lead individuals to appear more confident
and enthusiastic (Cuddy, Wilmuth, Yap, & Carney, 2015). Therefore, it is important to stress the
significance of context dependency in the social cognition-behavior system. The manifestation of
our social cognitive contents is codetermined by social and task contexts. Social influences instill
asymmetry into the system, but how the asymmetry affects behavioral dynamics will depend on
the particular task context.
In spontaneous rhythmic coordination, Miles and colleagues (2010) demonstrated that
social constraints could create asymmetry in coordination between individuals. Participants
synchronized less with a target person when the person committed undesirable behavior by
arriving late for the experiment. The negative characteristics of others could repel us from
synchronizing with them, resulting in less coordination. Moreover, asymmetry in social identities
among individuals moderated their entrainment. When individuals in a dyad were assigned to
different minimal groups, they might be motivated to resolve in the disparate identities by
interacting more with each other, which led to a higher level of spontaneous synchrony (Miles et

17
al., 2011). Also, individuals who were socially excluded became more motivated to affiliate with
others. Lakin, Chartrand, and Arkin (2008) found that participants who previously experienced
social exclusion were more likely to mimic their partner in the subsequent part of the experiment.
In sum, the degree to which individuals let themselves be influenced by and coupled with others
seems to be affected by social factors and social cognitive processes.
Interaction-Dominant Dynamical Systems
In classical conceptions of systems, a system could be nearly decomposed into a
hierarchy of nested timescales (Simon, 1973). For example, an organism can be analyzed at the
molecular level, cellular level, tissue level, organ level, organ system level, body level,
behavioral level, etc. Each level changes at its own timescale, and the shorter timescales are
nested within the longer ones. For example, cultures change on a longer timescale than social
attitudes, which change slower than daily social interactions. Within the classical approach, the
concept of timescale decomposition or vertical separation is central to the analysis of the system.
Behaviors at a faster timescale change against a backdrop of a relatively static longer timescale.
Hence, causal properties at different timescales can be isolated. In addition to vertical separation,
within each timescale, the system is assumed to exhibit loose horizontal coupling, which means
that the behavior is a result of linear interactions among independent components within the
same level. In other words, the system’s behavior can be parsed into the summation of the work
by its components at different timescales. Because causal properties of the system’s behavior can
be reduced to the system’s components, this kind of system is called a component-dominant
system. To study such systems, researchers employ a subtractive method, where one could
hypothesize the mediating components by subtracting the sum of behavior (e.g., reaction time)
under different conditions (Donders, 1868/1969; Gottsdanker & Shragg, 1985; Sternberg, 1969).

18
For example, differences in response time to act aggressively toward African American versus
Caucasian American targets could be attributed to a facilitation of social cognitive shortcuts such
as stereotypes. In addition, vertical separation suggests that fluctuations or noises within each
timescale are isolated from other timescales, and loose horizontal coupling implies that the
components’ noises are added to the behavior. Therefore, the noises are uncorrelated; they are
random factors that should be treated as measurement error.
The perspective of interaction-dominant dynamical systems (IDDS), on the other hand,
posits that nested hierarchies are both horizontally and vertically coupled (Eiler et al., 2013; Van
Orden & Holden, 2002). Components acting at the same timescale interact nonlinearly, and the
relationship between different timescale activities are coupled via feedback loops. The
component and timescale interactions are the causal driver behind the system’s behavior, hence
the term ‘interaction-dominant dynamics.’ The nonlinear interaction and feedback processes
enable complex phenomena, such as self-organization, to occur in IDDS. The collective behavior
of a self-organized system is a longer timescale behavior that emerges from faster timescale local
interactions. In turn, the collective behavior enslaves the local components’ behavior via
feedback loops. The system is, thus, vertically coupled, and causality cannot be solely attributed
to only one timescale. In other words, an IDDS exhibits circular causality. In addition, because
the interactions are multiplicative rather than additive, the noises of each component and each
timescale propagate throughout the system, resulting in a long-range correlation of behavior at
different timescales. Evidence supports the nature of long-range correlations or fractal noises in
human behavior such as postural sway (Blaszczyk & Klonowski, 2001), gait (Hausdorff, 2007;
Hausdorff et al., 1997), rhythmic behavior (Coey, Hassebrock, Kloos, & Richardson, 2015),
cognition (Holden & Rajaraman, 2012; Van Orden, Holden, & Turvey, 2003; Van Orden,

19
Holden, & Turvey, 2005) and social cognition (Correll, 2008; Wong, Vallacher, & Nowak,
2014), supporting the notion that human behavioral and cognitive dynamics are interaction-
dominant.
The assumption of vertical coupling provides a framework for studying how order in
social behavior emerges and sustains itself (Eiler et al., 2013). As mentioned earlier, the self-
organization process requires the emergence-constraints relationship, where global, collective
order emerges from the system’s components and, in turn, constrains how the local components
behave. In other words, the global behavioral patterns now become a context that enslaves the
local components. The nature of reciprocal causality allows influences from multiple timescales
to cascade through the nested hierarchies. For example, behavioral outcomes in our daily life
may give rise to our attitudes and world view. Furthermore, the pattern of interaction between
individuals who share the same belief system defines social norms and the culture of the society.
Simultaneously, societal norms dictate what is right and wrong and shape how we form attitudes
about people and things around us. Those attitudes, in turn, constrain our actions. Such positive
feedback loops strengthen the emergent patterns and sustain the system dynamics. For example,
previous research has shown that by seeding identity asymmetry via the minimal group
manipulation, people became more attached to their group and escalated hostility toward the
outgroups over time, which became a positive feedback loop that sustains the intergroup
dynamics (Sherif, Harvey, White, Hood, & Sherif, 1961). Nonetheless, the cascade of faster
timescales or the enslavement of slower timescales is not always linear. A system may be able to
maintain its stable dynamics in the face of influences from faster or slower timescale events, and,
then, the system may suddenly shift to a new pattern when the influences move beyond the
critical transition point (Tesser, 1980). Therefore, the IDDS framework inherently

20
accommodates nonlinearity typically found in social psychology, such as attitude-behavior
inconsistency.
The IDDS perspective provides a framework to apply the symmetry theory to rhythmic
coordination. From the IDDS perspective, spontaneous coordination emerges from local
nonlinear interaction of coupled oscillators. If a certain asymmetry is observed in an effect, this
asymmetry should also be found in the process that gives rise to the outcome. On one hand,
asymmetries in global behavioral patterns can be found in asymmetries of local interaction. The
interaction between oscillators is determined by their coupling functions. Hence, global
behavioral patterns of the whole system are determined by asymmetries of the coupling
constraints. In the case of interpersonal coordination, symmetries of coupling functions can be
determined by the availability of perceptual information about the oscillatory behavior (Schmidt
et al., 1990). On the other hand, the IDDS perspective suggests that slower timescale processes,
such as social cognition, can also constrain the dynamics of faster timescale processes, such as
interpersonal coordination. Asymmetries in social factors, such as group memberships, may
constrain the local interaction between individuals and, thus, lead to asymmetries in their
coordination. In sum, IDDS is a framework to integrate influences from multiple timescales into
the symmetry theory.
The Current Studies
Following the symmetric group theory of coupled nonlinear oscillators, the current
research focused on coordination among a group of three individuals during a drumming task, in
which each individual could be conceived as a nonlinear oscillator. While of the task varied in
each study, the three-person drumming task can generally be described as follows. Each of the
three individuals listened and drummed to simple metronome beats that were slightly offset from

21
one another, which prevented the group from being trapped in inphase coordination right away.
After 10 seconds, the metronomes stopped and each individual maintained the drum beats for the
rest of the trial. Coupling manipulations were achieved by limiting access to auditory and/or
visual information between the individuals. Because the individuals were not explicitly told to
coordinate with other group members, the emergence of coordination patterns during the task
could be attributed to the self-organized dynamics of coupled nonlinear oscillators. The goal of
the current research was to demonstrate how asymmetry in perceptual (Study 1) and social
information (Study 2) constrained and gave rise to asymmetry in behavioral coordination
patterns.
Study 1. This study aimed to demonstrate the first goal: To show how asymmetry in
perceptual constraints led to symmetry breaking of spontaneous coordination patterns in a ring of
three coupled nonlinear oscillators. Although there are four solutions to a ring of three oscillators
(i.e., D3, Z3, Z2 K , and Z2 K, π ), the Z2 K, π symmetry is not suitable for the spontaneous
three-person drumming task because one oscillator must move at twice the period of the other
two. Such symmetry is unlikely to occur when the task requires each individual to maintain a
similar drumming frequency. Since the focus of Study 1 was in asymmetry of the coupling
function, rather than asymmetry of period dynamics, the frequency was set to be similar across
individuals. Hence, the design of Study 1 ruled out the emergence of the pattern from Z2 K, π
symmetry. In addition, to achieve better control of the coupling manipulation, the participants
could not see each other and were only coupled via auditory information. Although visual
information about another’s movement might serve as a cue for coordination, the drum sound
was arguably the salient information that drives behavioral coordination in this task. In support
of this claim, previous work showed that participants were able to intentionally coordinate in the

22
drumming patterns described by the group symmetry whether visual information was available
or not (Ariyabuddhiphongs & Richardson, 2015, April). Following the Curie principle, the
symmetry of coupling functions should lead to a corresponding symmetry in the behavioral
organization. Hence,
Hypothesis 1.1: Symmetry of spontaneous coordination in the three-person rhythmic
drumming task can be found in the configuration of auditory coupling among individuals
performing the task.
Depending on the coupling condition, each of the three participants heard one, two, or
none of the other participants’ drumming. Emergent coordination patterns and their stability
were examined as a function of coupling configurations within a ring of three coupled oscillators
(see Figure 1). Four specific predictions and conditions follow Hypothesis 1.1.
1) The all-inphase pattern tends to emerge when all oscillators are identically and
bidirectionally coupled to each other (see Figure 1a). In this all-coupling condition,
all three participants could hear all other participant’s drumming.
2) The partial-inphase pattern tends to emerge when two oscillators are bidirectionally
coupled to each other and unidirectionally coupled to the third oscillator, while the
third oscillator is uncoupled from the previous two (see Figure 1b). In this partial-
coupling condition, the first and second participants could hear each other’s
drumming. They also could hear the third participant. Nonetheless, the third
participant could not hear the other two participants. Hence, the third person was
unaffected by others. At the same time, the other two participants were more likely
to adopt inphase synchrony.

23
3) The inphase pattern tends to emerge when two oscillators are bidirectionally
coupled, while the third oscillator is unidirectionally coupled to them (see Figure
1c). This clamped-coupling condition was an inverse of the previous one; the
coupling direction of the third oscillator was flipped. The first and second
participants could hear each other’s drumming and, at the same time, sent their
drumming to the third participant. However, the third participant’s drumming could
not be heard by any others. The inphase coordination from the first and second
participants was expected to drive the third participant to adopt the inphase pattern
as well.
4) The rotation pattern tends to emerge when each oscillator is unidirectionally coupled
(see Figure 1d). In this rotation-coupling condition, the first participant’s drum beats
could be heard by the second participant; the second participant’s beats could be
heard by the third participant; and the third participant’s beats could be heard by the
first. This setup created a ring of unidirectional flow of auditory information among
the three participants.

24
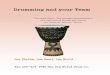
Figure 1. Schematic representation of the coupling configurations in Study 1. On denotes an oscillator n. The arrow direction represents the direction of auditory informational flows among the oscillators. Configuration (a), the all-coupling condition, allows all bidirectional coupling among the three oscillators. Configuration (b), the partial-coupling condition, allows bidirectional coupling between the first and second oscillators. Those oscillators are also affected by the third oscillator, but not vice versa. In Configuration (c), the clamped-coupling condition, the first and second oscillators are bidirectionally coupled, and the third one is unidirectionally affected by them (i.e., receiving signals from them). Configuration (d), the rotation-coupling condition, represents a ring with three unidirectional coupling. Configuration (e), the no-coupling condition, shows an uncoupled system.
In addition to the coupling constraints, the task frequency was limited to moderate and
slow frequencies as a high frequency might moderate stability of the emergent coordination
pattern. That is, a higher frequency tends to increase the attractor strength of inphase
coordination and destabilized other modes of coordination (Schmidt et al., 1998). Hence,
Hypothesis 1.2: The stability of the non-inphase coordination increases as the drumming
frequency decreases. Specifically, the rotation pattern was expected to be more stable in
the slow frequency drumming than in the moderate one.
Following Hypothesis 1.2, antiphase coordination was predicted to occur more often in
the lower frequency than in the moderate frequency condition in all of the four coupling
configurations. However, a slower drumming frequency should particularly facilitate
O1
O2 O3
a.
O1
O2 O3
b.
O1
O2 O3
c.
O1
O2 O3
d.
O1
O2 O3
e.

25
coordination at the 1/3 phase-shift (Z3 symmetry) in the unidirectional coupling condition
(Figure 1d).
Due to the unintentional nature and the fluctuation of initial conditions in the drumming
task, spontaneous coordination under this task might not always be perfect. Rather, intermittent
occurrences of the predicted patterns under each coupling configuration were expected. In sum,
Study 1 aimed to demonstrate that asymmetry in spontaneous behavioral coordination (i.e.,
drumming patterns) emerged as a result of asymmetry in the coupling constraints (i.e., auditory
information) among the nonlinear oscillators.
Study 2. To achieve the second goal, Study 2 attempted to demonstrate that asymmetry
in the social environment could constrain rhythmic behavioral coordination in a group of three
individuals. The dynamics of coupled nonlinear oscillators are contingent upon (a) coupling
functions among the oscillators and (b) the intrinsic dynamics of each oscillator. While Study 1
investigated the effect of asymmetry in coupling functions by a direct manipulation of the
informational flow, Study 2 was based on the notion that an individual’s social cognition could
modulate how individuals assemble their cognition-perception-action system under task
constraints. In other words, social cognition influences the behavioral dynamics by varying a
system’s parameters, such as the coupling strength. For example, a drummer who takes pride in
his or her ability to keep beats may put forth tremendous effort to uncouple him- or herself from
other group members (e.g., by closing his or her eyes). However, social cognitive processes are
not a sole determinant of behavior. Although the drummer tries hard to become uncoupled,
synchrony may still occur because other individuals in the group may still be susceptible to
entrain with the drummer. Moreover, the physical constraints on the task, such as the frequency
of oscillation, may help stabilize or destabilize the mode of coordination (Haken et al., 1985;

26
Schmidt et al., 1998). The notion that social cognition functions as a parameter constraint on the
system dynamics illustrates two major reasons why social cognition does not directly cause
behavior. First, at an individual level, social cognition influences only a subset of each
component’s intrinsic (e.g., frequency) or relational (e.g., coupling) parameters, leaving a
possibility for other influences, like a rigid physical constraint, to shape behavioral dynamics.
Thus, the relationship between social cognitive events and behavior is rarely one-to-one. Second,
at a system level, the collective behavior of a self-organized system (e.g., group coordination) is
an irreducible outcome of nonlinear interactions among the system’s components (e.g., each
person’s social cognition and neuromuscular system); no single component or hierarchy is solely
responsible for the collective behavior. Hence, the IDDS framework suggests that the dynamics
of social behavior, where social cognition is one of many constraints on the system, unfolds as a
result of nonlinear multiple-timescale interactions. A better understanding of the effect of social
cognition on behavior would require a good model on the level of state-, parameter-, and graph-
dynamics (Riley, Kuznetsov, & Bonnette, 2011; Saltzman & Munhall, 1992).
In the three-person drumming task, social contexts should influence behavioral
coordination by changing relational parameters such as the degree of coupling between the
individuals. In Study 2, participants’ coupling tendency was expected to be affected by an
asymmetry of social identity created by the minimal group paradigm. The paradigm was
invented to study social cognitive biases without being confounded by history or stereotypes of
the group (Tajfel, 1970). Typical minimal group studies assign participants into different made-
up, meaningless groups (e.g., different color). Miles et al. (2011) have shown that minimal group
memberships influence behavioral synchrony between individuals; participants coordinated more
with a target from a different group. Dissimilarity in group memberships might induce the need

27
to re-establish social connection (Lakin et al., 2008; Maner, DeWall, Baumeister, & Schaller,
2007; Williams, Cheung, & Choi, 2000), which led to more synchrony. In Study 2, each
individual in a group of three was assigned into either the blue or the red group. Because
minimal groups were inherently hollow, there was no difference in which group held majority or
minority members. Therefore, the four permutations of the group assignment, which are 1) all
three reds, 2) two reds and one blue, 3) one reds and two blue, and 4) all three blues, are
symmetrical and can be collapsed into two conditions: homogenous and heterogeneous groups.
To simplify the experimental design, Permutation 3 and 4 were excluded from the study. After
the minimal group assignment, participants performed the spontaneous three-person drumming
task without any constraints on visual or auditory information. Because perceptual information
was not physically constrained in this study, asymmetry in behavioral coordination should be
attributed to asymmetry in participant’s social identity. Hence,
Hypothesis 2.1: Asymmetry in minimal group membership among individuals induces
asymmetry in the degree of coupling among them, which eventually leads to asymmetry in
spontaneous behavioral coordination during the spontaneous three-person drumming
task.
Per Hypothesis 2.1, specific predictions follow. First, the homogeneous group (i.e., all
three individuals in the same minimal group) embodies the D3 symmetry. Individuals exhibit
similar rhythmic behavior and are more likely to show the all-inphase coordination pattern.
Second, the heterogeneous group (i.e., two individuals in one minimal group and one individual
in the other group) resembles Z2 K symmetry, where two oscillators move inphase and the other
moves out of phase. Considering the dissimilarity in his or her social identity, the minority
participant is more likely to have different intrinsic dynamics (e.g., frequency) from the majority

28
participants. Nonetheless, the minority participant is also driven by the need to establish social
connection with the others. Therefore, the individual is more likely to show inphase coordination
with the majority participants.
In addition to spontaneous behavior, disparity of group membership within a triad might
also affect explicit coordination as well as role differentiation. In the explicit drumming task, the
participants had to differentiate their roles and control their rhythmic behavior to achieve the
partial-inphase drumming pattern. Because the heterogeneous group had similar configuration to
the Z2 K symmetry, the participants might be primed with their group identity to choose a
congruent drumming role in the partial-inphase pattern (i.e., the majority participants drummed
inphase, while the minority one drummed antiphase). Furthermore, the congruency between the
role and identity might also influence their coordination dynamics. Hence,
Hypothesis 2.2: In the explicit three-person drumming task, an individual is more likely
to adopt a drumming role that is congruent with his or her minimal group identity.
Hypothesis 2.3: When all individuals in a triad adopt drumming roles that are congruent
with their minimal group identity, their coordination is more stable than when they adopt
incongruent roles.
In sum, the effect of minimal group membership on both spontaneous and explicit
coordination were investigated in Study 2. Asymmetry in social cognitive processes, such as
intergroup biases or the need for social connections, was expected to constrain how a multi-agent
system organized its collective behavior.

29
Chapter 2
Study 1
Overview
The goal of Study 1 was to demonstrate how different spontaneous interpersonal
coordination in the three-person drumming task emerged as a function of asymmetry in auditory
coupling constraints. In addition, to determine whether oscillation frequency modulates
coordination stability, the triads of participants either drummed at a frequency of 45 bpm or 60
bpm
Participants
Seventy-five undergraduate and graduate students (Mage = 21.08 yrs, SDage = 3.70; 49
women and 26 men; 82.67% Caucasian, 9.33% Asian, 4% African American, 2.67% Other)
participated in the study in groups of three, resulting in 25 triads. A participant in one of the
triads did not drum at the instructed pace, and that triad was removed from the analysis1. The
data analyses were performed on the remaining 24 triads. Half of triads were assigned to drum in
the slower, 45-bpm condition, while the other 12 triads were assigned into the moderate, 60-bpm
drumming condition.
Instruments
Electronic drum set. Each participant in a three-person group stood in front of a
Yahama DTXPRESS drum pad (Yamaha Corporation, Buena Park, CA) with a drumstick in his
or her dominant hand. The drum pads were positioned to face up at each participant’s
approximate waist height. The MIDI signals from the drum set were fed to a Dell Optiplex 760
desktop computer (Dell Inc., Round Rock, TX) for recording and audio generation.
1 The participant drummed at twice the frequency of the rest of the group, which resembled the Z2 K, π symmetry. However, this behavior deviated from the task instruction.

30
Headphones and audio interface. Three pairs of headphones were connected to an
Focusrite Scarlett 18i8 audio interface (Focusrite Audio Engineering, Buckinghamshire, UK) for
an audio input/output routing. Audio generated from the electronic drum set was selectively
routed to each participant depending on their coupling conditions.
Metronome and background noise. For the 45-bpm condition, three 10-second
metronome audio clips with different tempos (i.e., 41.4, 45, and 48.6 bpm) were used to set up
the rhythm for the drumming task. The lower and upper bpm were ±8% of the middle 45 bpm
(0.75 Hz) and were under the range of ±10-15% period differences that encompassed the basin of
entrainment (Lopresti-Goodman, Richardson, Silva, & Schmidt, 2008). Unintentional
coordination is less likely to occur if period differences are greater than that range. The three
tempos were offset to prevent the participants from starting a trial in inphase coordination. In the
60-bpm condition, the three metronomes were set to 55.2, 60, and 64.8 bpm, which were in the
range of ±8% of 60 bpm (1 Hz).
In addition, white noise was played in the background during the experimental session to
minimize any ambient noises as well as a sound from physical contact between the drumsticks
and the pads. The generated drum sound was set to be louder than the white noise. None of the
participants had trouble hearing the generated audio.
Motion capture system. A Polhemus Fastrak magnetic motion tracking sensor
(Polhemus Corporation, Colchester, VT) was attached to each drumstick. The relative movement
position in X, Y, and Z planes of the drumsticks were recorded at 40 Hz.
Procedure
Each triad was randomly assigned to either the 45-bpm or 60-bpm condition. In each
session, each participant stood on each side of a triangle drum rack. The curtains were raised to

31
block any visual access among the participants. Hence, the only source of their informational
coupling was the auditory information generated by the electronic drums. An experimenter
explained that he was studying how people kept rhythm. The participant’s task was to drum to a
metronome played via his or her headphones for 10 s. Once the metronome stopped, the
participant should do his or her best to maintain the drumming rhythm for another 50 s. Hence,
the total length of each trial was 60 s. The participants were informed that their metronomes
might or might not be different from other participants and that they should not be worried if
they were not in sync with others. It is important to note that the participants were not given any
explicit instruction to coordinate with other participants. If a participant asked for clarification,
the experimenter would only repeat the instruction that the participants should try their best to
maintain the rhythm that they heard.
Five within-subject conditions were designed to investigate the effect of asymmetric
coupling on spontaneous coordination. First, the all-coupling condition (D3 symmetry; Figure
1a) allowed all participants to hear the drumming from all other participants. Second, the partial-
coupling condition (Z2 K symmetry; Figure 1b) allowed two participants to hear each other’s
drumming and the third participant’s drumming, but the third participant, the independent
oscillator, did not hear any drumming from the first two participants. Third, the clamped-
coupling condition (modified Z2 K symmetry; Figure 1c) allowed the first and second
participants to hear each other, and their drumming was sent to the third participant, the clamped
oscillator, but the first and second participants could not hear the third participant’s drumming.
Fourth, the rotation-coupling condition (Z3 symmetry; Figure 1d) allowed each participant to
hear only the drumming from the person to their right, forming a ring of unidirectional coupling.
Fifth, the no-coupling condition was a baseline control condition, where none of the participants

32
could hear any other’s drumming. Any intermittent coordination in this condition should occur
by chance.
Each of the five conditions was a block of three trials, yielding in a total of 15 trials. The
order of the conditions was randomized. The coupling configurations and metronome
frequencies were rotated among participants from trial to trial. Therefore, each participant
experienced each role in each coupling configuration at least once. For example, in the partial-
coupling condition, which had two bidirectionally coupled oscillators and the independent
oscillator, the participants in a group took turns being assigned into the independent role during
the three trials of this condition. Participants were unaware of the conditions and roles to which
they were assigned.
Data Preparation, Reduction, and Analysis
Drumsticks position and MIDI audio time series for each trial were truncated from the
15th to the 55th second. The first 15 s were removed to eliminate any unstable movements that
might occur at the beginning of the trial when the metronomes were played. The remaining data
was then trimmed to an equal length at the 55th second, resulting in the remaining 40 s of time
series data.
Drumstick position and velocity. Instead of oscillating their drumstick in a stationary
fashion with respect to the target period, some participants kept their rhythm by tapping in
between the beats in mid-air. This behavior seems to be a solution to keeping the beats outside an
average preferred frequency of 120 bpm (Moelants, 2002). Although those participants still
produced the drumming sound with respect to the metronome’s period, the oscillation of their
movement was twice the target frequency. This behavior posed challenges in the identification of
drumming events and the calculation of relative phase. In relative phase analysis, the signals are

33
assumed to have the same or similar frequency components. Therefore, an analysis of two
movement position time series with different frequency components will result in spurious
relative phase angles, which do not reflect the coordination of the actual drumming events. For
the sake of accuracy and consistency in the relative phase calculation, the movement position
and its derivative (i.e., velocity) were forsaken. Instead, the MIDI audio data, which captured the
exact drumming events, was used.
MIDI data. The electronic drum pads generated digital MIDI signals that contained
information regarding how the instruments were played. Timestamps of the drumming events
were extracted from the MIDI data and used for the discrete relative phase analysis. To prepare
the MIDI time series, first, any drumming events that occurs within 0.33 s (~3 Hz) of the prior
event were considered spurious and removed from the analysis. Second, within each person’s
MIDI time series, abnormally large gaps between drumming signals were removed. The exact
cutoff varied in some trials but, on average, any gaps that were larger than 1.5 times the
metronome frequency were removed. Third, any time series with too few or too many beats were
removed. A time series with too few beats indicated that the participant could not continuously
maintain their drumming, while a time series with too many beats indicated that the participant
was drumming faster than the target frequency. Tukey’s hinges of the total number of beats for
each frequency condition were used as a cutoff. The lower and upper limits for the 60-bpm
condition were 31 and 47 periods, respectively. For the 45-bpm condition, the lower and upper
limits were 23.5 and 35.5 periods, respectively. Any trials that had one or more time series with
the total beats outside the range (i.e., outliers) were removed from the analysis. A total number of
removed trials was 37, which equals 111 removed time series from a total of 1080 (24 triads ´ 3
persons ´ 15 trials) or 4.1%. The removed trials accounted for 11.7% and 8.9% of the data in the

34
45-bpm and 60-bpm conditions, respectively. They also accounted for 18.1% in the all-coupling
condition, 6.9% in the partial-coupling condition, 11.1% in the clamped-coupling condition,
2.8% in the rotation-coupling condition, and 12.5% in the no-coupling condition.
Discrete relative phase analysis. The MIDI time series from the three participants were
subjected to a pair-wise discrete relative phase analysis (Varlet & Richardson, 2011; Wheat &
Glazier, 2006). The calculation of discrete relative phase is
ϕ= t1(j)-t2(j)
t1(j+1)-t1(j)×360°. (14)
In this equation, t1and t2 are time of the maximum or peak rotation (e.g., a drumming event) of
Oscillator 1 and 2, respectively. In this case, Oscillator 1 is a reference signal, and its period is
calculated from the peak of the cycle j to the next cycle, j+1. The latency of t2 to t1 is scaled to
the period of Oscillator 1 and, then, converted into a 360° scale to yield a relative phase angle, f.
Because f is a circular variable, the scale can be transformed from 0°–360° to -180°–180°. Then,
a positive value of f indicates how much t2(j) lags the reference signal, t1(j). On the other hand, a
negative f indicates how much t2(j) leads the next cycle of the reference signal, t1(j+1).
The discrete relative phase (f) for drumming events for each possible pair in a triad were
calculated in a -180° to 180° range. A frequency distribution of relative phase was constructed
with a bin size of 20°, and a percentage of occurrence (% occurrence) within each bin was
calculated by dividing the bin’s frequency by a total number of f. The distribution of ϕ around 0°
indicates inphase relationship, while the distribution around -180° or 180° indicates antiphase
relationship. In the rotation pattern, each oscillator is offset by one-third of a period, which
equals to -120° or 120° relative phase angle.

35
In addition, a degree of synchrony (r), which indicates the stability of the coordination
(Pikovsky, Rosenblum, & Kurths, 2001; Richardson, Garcia, Frank, Gregor, & Marsh, 2012) was
calculated for each pair in a triad. The r value is an inverse of circular variance of the relative
phase and ranges from zero (no coordination) to one (perfect synchrony). It is important to note
that a high r value can be achieved from a strong synchrony at any phase angle. For example,
strong antiphase coordination can also result with high r value.
Statistical analysis. The effect of between- (i.e., drumming frequencies) and within-
subject (i.e., coupling conditions) factors was modeled with the linear mixed model (LMM)
approach. Because random assignment was utilized throughout the experimental design, the
random effect of subjects was not included in the LMM, making it a marginal model. An
unstructured covariance matrix was used in the LMM. All means shown in the results sections
were estimated marginal means unless stated otherwise.
Results
Average drumming periods. An average drumming period for each participant in each
trial was calculated from the MIDI audio data. A larger period indicated slower frequency
drumming. The metronome target period was 1.33 s for 45 bpm and 1 s for 60 bpm. As expected,
the participants’ average drumming period in the 45-bpm condition (M = 1.289 s, SE = 0.007)
was longer than the period in the 60-bpm condition (M = 0.993 s, SE = 0.007), F(1, 63.89) =
914.48, p < .001. The participants were, on average, drumming close to the target frequency. In
addition, the main effect of coupling condition was significant, F(4, 63.40) = 14.01, p < .001).
The main focus of this analysis was a significant interaction between the frequency and coupling
conditions, F(4, 63.40) = 12.13, p < .001. In the 60-bpm condition, the participant’s average
periods were similar across all coupling conditions (Ms = 0.989–0.999 s, SEs = 0.007–0.011, ps

36
> .05 with Bonferroni adjustment). On the other hand, in the 45-bpm condition, the average
periods in the no-coupling (M = 1.326 s, SE = 0.009) and partial-coupling conditions (M =
1.329 s, SE = 0.010) were greater than those in the all-coupling condition (M = 1.285 s, SE =
0.010), which in turn were greater than those in the clamped-coupling condition (M = 1.248 s, SE
= 0.008) and the rotation coupling condition (M = 1.255 s, SE = .007). The drumming periods in
the 45-bpm no-coupling and partial-coupling condition were also closer the target frequency
(1.33 s). Table 1 and Figure 2 show the estimated marginal mean periods by frequency and
coupling conditions.

37
Table 1
Estimated marginal means of average period and period instability for each coupling condition
(in bold), asymmetric coupling function (in regular*), and drumming frequency. Standard errors
are in parentheses.
Coupling Conditions
No
All
Partial
Clamped
Rotation
Frequency Coupled
Independent
Total Coupled
Clamped
Total
Average Periods
45 bpm 1.326
(0.010)
1.285
(0.010)
1.311
(0.012)
1.361
(0.014)
1.329
(0.010)
1.245
(0.010)
1.268
(0.013)
1.248
(0.008)
1.255
(0.007)
60 bpm 0.999
(0.009)
0.991
(0.011)
0.975
(0.011)
1.027
(0.013)
0.991
(0.010)
0.981
(0.010)
1.005
(0.012)
0.989
(0.008)
0.993
(0.007)
Total 1.162
(0.007)
1.138
(0.007)
1.143
(0.008)
1.194
(0.009)
1.160
(0.007)
1.113
(0.007)
1.137
(0.009)
1.118
(0.006)
1.124
(0.005)
Period Instability (Coefficient of Variation)
45 bpm 0.039
(0.002)
0.053
(0.002)
0.047
(0.003)
0.052
(0.003)
0.048
(0.002)
0.050
(0.003)
0.053
(0.004)
0.048
(0.002)
0.050
(0.002)
60 bpm 0.042
(0.002)
0.048
(0.002)
0.048
(0.002)
0.048
(0.003)
0.046
(0.002)
0.047
(0.003)
0.051
(0.004)
0.046
(0.002)
0.050
(0.002)
Total 0.041
(0.001)
0.050
(0.002)
0.047
(0.002)
0.050
(0.002)
0.047
(0.001)
0.049
(0.002)
0.052
(0.003)
0.047
(0.002)
0.050
(0.002)
* The estimated marginal means for each asymmetric coupling function (i.e., coupled, independent, and clamped conditions) would not yield the same arithmetic mean to their corresponding coupling condition’s total estimated marginal means. This inconsistency exists because the total estimated marginal means of the coupling conditions were derived from an omnibus LMM, while the estimated marginal means for each asymmetric coupling function were calculated from the separate analysis within the coupling condition.

38
Figure 2. Mean period by frequency and coupling conditions. Error bars represent standard error. Dotted lines represent the target period for each drumming frequency.
Among the coupling conditions, the partial-coupling and clamped-coupling conditions
created asymmetry of coupling function among participants in a triad, while the participants in
the no-coupling, all-coupling, and rotation-coupling conditions were considered symmetrical or
equivalent. Specifically, in each trial of the partial-coupling condition, one participant in a triad
did not receive any drumming sound from the other two participants but did send his or her
drumming sound toward the other two. Hence, the individual was considered an independent
oscillator in the partial-coupling condition. In the clamped-coupling condition, one of the three
oscillators received the drumming sound from the other two, but did not send its signal back to
the rest of the group. Therefore, the oscillator was being influenced by the two coupled
oscillators, but not vice versa. In other words, the participant in this coupling function was
‘clamped’ by drumming signals from the rest of the group. To investigate the effect of such

39
asymmetry in the coupling function, separate analyses were conducted for the partial- and
clamped-coupling conditions. The means of average periods for each coupling function are
shown in Table 1 (in regular font).
For the partial-coupling condition, the means of average period in the 45-bpm and 60-
bpm condition were 1.336 s (SE = 0.011) and 1.001 s (SE = 0.011), respectively. This main
effect of frequency was significant, F(1, 73.49) = 475.52, p < .001. Also, the main effect of
asymmetric coupling function was significant, F(1, 127.81) = 36.00, p < .001. Regardless of
drumming frequency, the independent oscillators’ average period (M = 1.194 s, SE = 0.009) was
longer than the other two coupled oscillators (M = 1.143 s, SE = 0.008). The interaction effect
was not significant, F(1, 127.81) = 0.03, p = .866. These results suggest that, in general, the
participants who did not hear the rest of the group drummed slower than the others who were
coupled to each other (see Figure 3a).
In the clamped-coupling condition, there was a significant difference of average period
by frequency (M45bpm = 1.257 s, SE45bpm = 0.009 vs. M60bpm = 0.993 s, SE60bpm = 0.009), F(1,
72.50) = 420.81, p < .001. The main effect of asymmetric coupling function was also significant,
F(1, 116.23) = 6.47, p = .012. The average period of the clamped oscillators (M = 1.137 s, SE =
0.009) was longer than that of the coupled oscillators (M = 1.113 s, SE = 0.007). Again, among
the participants in a triad, those who were bidirectionally coupled to each other demonstrated
shorter average periods or faster drumming frequency (see Figure 3b). The interaction between
the frequency and asymmetric coupling function was not significant, F(1, 116.23) = 0.001, p =
.981.

40
Figure 3. Mean period for each coupling function in (a) the partial-coupling and (b) the clamped-coupling conditions. Error bars represent standard errors. Dotted lines represent the target period for each drumming frequency.
Period instability. Instability of drumming period was measured by a coefficient of
variation, which is defined as the standard deviation of drumming period during a trial divided
by the target period (i.e., 1 s for the 60-bpm condition and 1.33 s for the 45-bpm condition). By
scaling the standard deviation to the target period, the influence of period magnitude was
neutralized, allowing for fair comparisons of instability between different oscillatory periods.
Table 1 shows the period instability for each condition.
The coefficient of variation in the 45-bpm condition (M = 0.048, SE = 0.002) was not
significantly different from the 60-bpm condition (M = 0.046, SE = 0.002), F(1, 52.05) = 0.24, p
= .624. For the main effect of coupling condition, the instability of the no-coupling condition (M
= 0.041, SE = 0.001) was lower than all other four coupling conditions (Ms = 0.047-0.050, SEs =
0.001–0.002), F(4, 59.40) = 9.89, p < .001 (see Figure 4). The interaction between frequency and
coupling conditions was not significant, F(4, 59.40) = 1.41, p = .241.
a. b.

41
Figure 4. Mean period instability (coefficient of variation) by frequency and coupling conditions. Error bars represent standard errors.
Separate analyses were conducted for the partial-coupling and clamped coupling
conditions to examine the effect of asymmetric coupling function. For the partial-coupling
condition, none of the main or interaction effects were significant, Fs = 0.22–1.76, ps = .187–
.643. Also, for the clamped-coupling condition, none of the effects were significant, Fs = 0.11–
1.84, ps = .178–.743.
Discrete relative phase of drumming periods. The frequency distributions of ϕ from
each trial were averaged for each of the frequency, coupling, and asymmetric coupling function
conditions. Figure 5 shows the mean relative phase frequency distributions by condition. To
determine whether the % occurrence in each bin was due to chance, the % occurrence within
each condition was bootstrapped to estimate a 95% confidence interval. If the lower limit of the

42
confidence interval was higher than the probability of a uniform distribution (100/18 bins =
5.56%), the mean % occurrence in that bin was considered above chance level, indicating
significant spontaneous coordination at that bin’s phase angle.
For the all-coupling condition, ϕ distributed around -40° to 40° in both the 45-bpm and
60-bpm conditions, suggesting spontaneous inphase coordination. Moreover, albeit
nonsignificant, the participants showed a trend of multi-stability in the 45-bpm condition, where
antiphase coordination might also emerge occasionally.
For the partial-coupling condition, the mean % occurrence distribution was not above
chance level in the 45-bpm condition. However, upon closer inspection, these means had large
variance because they were averages of participants who mainly coordinated inphase and those
who mainly coordinated antiphase. By averaging % occurrence distribution of these two groups,
the peaks at both 0° and 180° were attenuated, giving a false impression of no coordination. In
the 45-bpm partial-coupling condition, there were roughly equal number of time series pairs that
were inphase and antiphase2 (28 and 37 pairs, respectively). The other coupling conditions,
except the no-coupling condition, had more inphase pairs than antiphase pairs (see Table 2 for
more detail). Although the 45-bpm partial-coupling condition had a larger proportion of pairs
with antiphase than did the other coupling conditions (except the no-coupling condition), within
the condition, the proportion of antiphase pair occurrence was the same for the independent-
coupled oscillator pair and the coupled-coupled oscillator pair, c2(3, N = 93) = 0.84, p = .840.
That is, the independent oscillator was not more likely to coordinate antiphase than the rest of the
2 Inphase and antiphase time series pairs were determined by comparing the %occurrence in the 0°, -180°, and 180° bins to the chance level. If the % occurrence in the -20° to 20° bin was more than 5.56%, the pair was counted as inphase. If the % occurrence in the -180° to -160° or 160° to 180° bins was above chance level, the pair was antiphase. If the pair was both inphase and antiphase, it was counted as a separate category, the multiphase. The pair that was neither inphase nor antiphase was categorized as the no-phase.

43
group; instead, the group as whole was more likely to engage in antiphase coordination.
However, these patterns were limited to the 45-bpm condition. The proportion in the 60-bpm
partial-coupling conditions showed that the inphase pairs were more likely to occur than the
antiphase pairs, and the % occurrence of ϕ distributed around -40° to 40° phase angle, indicating
inphase coordination. Hence, the prediction that the independent oscillator is more likely to
coordinate antiphase was not supported at either drumming frequency. Nonetheless, the results
gave a partial support to Hypothesis 1.2, which also predicted an increase in antiphase
coordination at the slower frequency.
The relative phase distributions in the clamped-coupling condition were similar to the
all-coupling condition; ϕ distributed around -40° to 40° for both drumming frequencies. Also, the
clamped and the coupled oscillators did not show any difference in their coordination with other
oscillators. Overall, inphase coordination was the main mode of spontaneous coordination in the
clamped-coupling condition.
For the rotation-coupling condition, the frequency distributions were above chance
around -40° to 40° in the 45-bpm condition and around -60° to 40° in the 60-bpm condition.
Contrary to the prediction, participants did not adopt a rotation drumming pattern in this
condition. Instead, the participants showed spontaneous inphase coordination.
For the no-coupling condition, the mean % occurrence distribution was flat for both the
45-bpm and 60-bpm conditions. Although higher proportions of time series pairs were in the
antiphase than the inphase mode, more pairs were also in the multiphase mode (see Table 2).
Also, the categorization of the phase mode did not take into account the magnitude of %
occurrence, allowing fairly low % occurrence, yet higher than 5.56%, to represent the phase
mode. Nonetheless, the higher proportion of antiphase and lower proportion of inphase might

44
contributed to an unexpected significant % occurrence in the -180° to -160° and 160° to 180° bin
in the 45-bpm condition. The higher chance of antiphase coordination might due to imperfect
noise isolation between the participants. The physical ‘thud’ sound occurring when a drumstick
hit a pad might have leaked through the white-noise background and influenced participants into
the antiphase mode. Nonetheless, % occurrence in those bins was not high, and the overall
picture still suggested a flat distribution of ϕ, suggesting no main mode of coordination.
Table 2
Number of time series pairs categorized as different phase modes by coupling condition (in bold)
and by asymmetric coupling function (in regular)
Coupling Conditions
No
All
Partial
Clamped
Rotation
Frequency Coupled-
Coupled
Independent-
Coupled
Total Coupled-
Coupled
Clamped-
Coupled
Total
45 bpm
Inphase 15 51 9 19 28 19 28 47 50
Antiphase 29 27 11 26 37 5 14 19 27
Multiphase 34 15 7 12 19 4 15 19 18
No-phase 12 3 4 5 9 2 3 5 13
60 bpm
Inphase 21 51 20 32 52 20 37 57 63
Antiphase 44 11 5 12 17 5 13 18 14
Multiphase 22 8 8 17 25 4 11 15 14
No-phase 12 11 3 11 14 5 7 12 11

45
Figure 5. Mean frequency distribution of relative phase by frequency and coupling conditions. Error bars represent bootstrapped 95% confidence intervals.
45 bpm 60 bpm

46
Coordination Stability. The stability of coordination or synchrony was measured with
r, an inverse of circular variance of the relative phase. The value ranges from 0 to 1, where 1
indicates perfect synchrony and 0 indicates no synchrony. The means and standard errors of r by
the conditions are shown in Table 3. The LMM revealed a significant main effect of coupling
condition, F(4, 61.45) = 69.00, p < .001. Regardless of the drumming frequency, r in the no-
coupling condition (M = .32, SE = .01) was lower than in all other conditions (Ms = .50–.64, SEs
= .02–.03), ps < .001. The coordination in the partial-coupling (M = .50, SE = .02) was less stable
than in the all-coupling (M = .64, SE = .03) and the clamped-coupling conditions (M = .60, SE =
.02), ps < .01. Also, the mean r in the rotation-coupling condition (M = .55, SE = .02) was lower
than in the all-coupling condition, p = .013 (see Figure 6; all pair-wise comparisons were
subjected to a Bonferroni correction). The main effect of frequency, F(1, 56.72) = 0.03, p = .863,
and the interaction effect of frequency and coupling condition were not significant, F(4, 61.45) =
1.46, p = .224.
Figure 6. Means coordination stability (r) by frequency and coupling conditions, sorted in ascending order. * denotes significant difference at a = .05 with a Bonferroni adjustment.

47
Table 3
Estimated marginal means of coordination stability (r) for each coupling condition (in bold),
asymmetric coupling function (in regular*), and drumming frequency. Standard errors are in
parentheses.
Coupling Conditions
No
All
Partial
Clamped
Rotation
Frequency Coupled-
Coupled
Independent-
Coupled
Total Coupled-
Coupled
Clamped-
Coupled
Total
45 bpm .33
(.02)
.65
(.03)
.63
(.06)
.51
(.04)
.53
(.03)
.58
(.05)
.54
(.04)
.57
(.03)
.54
(.03)
60 bpm .32
(.02)
.63
(.04)
.52
(.05)
.45
(.04)
.47
(.03)
.62
(.05)
.62
(.03)
.62
(.03)
.55
(.03)
Total .32
(.01)
.64
(.03)
.58
(.04)
.48
(.03)
.50
(.02)
.60
(.04)
.58
(.03)
.60
(.02)
.55
(.02)
* The estimated marginal means for each asymmetric coupling function (i.e., coupled, independent, and clamped conditions) would not yield the same arithmetic mean to their corresponding coupling condition’s total estimated marginal means. This inconsistency exists because the total estimated marginal means of the coupling conditions were derived from an omnibus LMM, while the estimated marginal means for each asymmetric coupling function were calculated from the separate analysis within the coupling condition.
Separate analyses were conducted for the partial-coupling and clamped-coupling
conditions to determine the effect of asymmetric coupling function within the two conditions.
For the partial-coupling condition, the main effect of frequency was marginally significant, F(1,
84.79) = 2.95, p = .090. Mean r in the 45-bpm condition (M = .57, SE = .04) tended to be higher
than mean r in the 60-bpm condition (M = .49, SE = .03). The high r in the 45-bpm condition
might due to the fact that more occurrences of antiphase coordination in the partial-coupling

48
condition contributed to a higher average coordination stability. The main effect of the
asymmetric coupling function was significant, F(1, 130.54) = 4.58, p = .034. The coordination
stability between the independent oscillator and the rest of group (M = .48, SE = .03) was lower
than the coordination stability among the other two oscillators themselves (M = .58, SE = .04; see
Figure 7). The interaction effect was not significant, F(1, 130.54) = 0.29, p = .593.
In the clamped-coupling condition, none of the main nor interaction effects were
significant, Fs = 0.17–1.96, p = .165–.683.
Figure 7. Mean coordination stability (r) for asymmetric coupling in the partial-coupling condition. Error bars represent standard errors.
Discussion
The purpose of Study 1 was to test whether asymmetry in informational coupling could
lead the corresponding asymmetry in coordination patterns during the three-person drumming
task (i.e., Hypothesis 1.1). However, the results suggested that inphase coordination was the
main mode of coordination among the four coupling conditions (i.e., all-, partial-, clamped, and

49
rotation-coupling), while the participants showed little to no coordination in the no-coupling
condition3 (see Figure 5). The results also suggested an influence of drumming frequency on the
emergence of spontaneous coordination in the partial-coupling condition. That is, the participants
in the 45-bpm partial-coupling condition coordinated inphase and antiphase at about the same
proportion. However, in the 60-bpm condition, inphase coordination dominated even in the
partial-coupling constraints. Consistent with the HKB model (Haken et al., 1985), the slower
oscillation seems to allow an emergence of multi-stable system, where both inphase and
antiphase coordination could be a solution of the system. The trend of % occurrence distribution
around the -180° and 180° bins in the all-coupling and partial-coupling conditions lend support
to that notion. When the oscillation frequency increased to 60 bpm, antiphase coordination was
apparently no longer a stable solution of the system and the spontaneous coordination became
inphase. Nonetheless, the multi-stability due to the drumming frequency was not associated with
asymmetric coupling (i.e., independent vs. coupled oscillators). In the partial-coupling condition,
both independent and coupled oscillators were equally like to coordinate antiphase with the other
oscillators. In sum, asymmetry of the coupling function in the drumming task context was not
enough to induce symmetry breaking of the coordination pattern per se. However, as discussed in
the next paragraph, the symmetry-breaking of the coupling function did influence the stability of
spontaneous coordination.
Overall, there was no effect of drumming frequency on coordination stability across all
five coupling conditions. As expected, the participants’ coordination was the least stable in the
3 The significant %occurrence distribution around antiphase bin in the 45-bpm condition might result from a leakage of physical drumming sound through the background white noise. This effect was small and only occurred in the slower frequency, where the system might be multi-stable. As the drumming frequency was increased to 60 bpm, the participants did not show any spontaneous coordination.

50
no-coupling conditions and strongest in the all-coupling condition (see Figure 6). Also, mean
coordination stability for the rotation-coupling condition was in between the no-coupling and the
all-coupling conditions, which suggested the variation of coordination strength as a function of
the coupling configurations.
The coupling condition did not only affect spontaneous coordination but also the
drumming frequency. In the slower drumming frequency of 45 bpm, the participants were
drumming slower and closer to the target period of 1.33 s in the no-coupling and partial-coupling
than in the other coupling conditions (see Figure 2). In the no-coupling condition, it seems that
the absence of a positive feedback loop from bidirectional coupling allowed the participants to
maintain their target periods without being interfered by other participants’ drumming
frequencies. In the case of the partial-coupling condition, asymmetric coupling modulated the
participant’s drumming period. Since the independent oscillator was unaffected by the group, it
could keep its cycles slower than the coupled oscillators. In addition, by maintaining a lower
frequency, the independent oscillator influenced the coupled oscillators via its unidirectional
coupling to them, resulting in a slower average period for the whole group than the three other
coupling conditions (i.e., all-, clamped-, and rotation-coupling). The notable difference between
the unidirectional and bidirectional coupling was also demonstrated in the clamped-coupling
condition. Although the clamped oscillator was unidirectionally affected by the increased
frequency of the two bidirectionally coupled oscillators, its frequency was still slower than the
rest of the group. These results suggested that a positive feedback loop created by bidirectional
coupling had a stronger effect in modulating the oscillation frequency than the unidirectional
coupling. This conclusion was also consistent with the frequency increase in the rotation-
coupling condition. Despite having only unidirectional coupling with adjacent oscillators, the

51
positive feedback loop operated via an intermediate oscillator in the rotation coupling, resulting
in a faster mean period. Nonetheless, most of the effects were attenuated in the 60-bpm
condition. It is possible that the participants were drumming at about half the frequency of what
people typically prefer (approximately 2 Hz or 120 bpm; MacDougall & Moore, 2005; Moelants,
2002), which might allow a better frequency maintenance. The similarity between the exogenous
and endogenous frequency might facilitate stable coordination (Zamm, Wellman, & Palmer,
2016), which helped the participants maintain their periods. Nonetheless, the effect of
asymmetric coupling function (i.e., independent or clamped vs. coupled oscillators) on the
periods still held in the 60-bpm partial-coupling and clamped-coupling conditions, suggesting a
persistent difference between unidirectional and bidirectional coupling. Finally, being coupled
with others also increased period instability (see Figure 4), which suggested that variability
increased as the participants influenced each other.
In sum, the hypothesis that asymmetry in coupling configuration results in a
corresponding asymmetry in coordination pattern was not supported. Nonetheless, the coupling
conditions were found to affect the average drumming period. The directionality of the coupling
function played an important role in modulating the drumming frequency. The positive feedback
loop found in bidirectional coupling might be responsible for the increased frequency of the
entire group, whereas unidirectional coupling was less likely to bring the other oscillators to the
same level. However, depending of the direction of the information flow, an oscillator may help
maintain the entire group frequency at a target period (as the independent oscillator did) or
follow the faster periods by the rest of the group (as the clamped oscillator did).

52
Chapter 3
Study 2
Overview
The goal of Study 2 was to determine the effect of social information on the symmetry of
spontaneous coordination during the three-person drumming task. The participants’ coordination
was predicted to be constrained by asymmetry of their group memberships. The minimal group
paradigm was utilized to manipulate the participants’ group identity. The notion that asymmetry
in group membership would lead to asymmetry in coordination was tested during spontaneous
drumming. In addition, the explicit drumming task was used to test the predictions that the
participants would choose their role in the task according to the symmetry of their group
membership and that congruency between group membership and task symmetry would lead to
stable coordination.
Participants
Twenty-nine triads of same-sex participants were randomly assigned into either the
homogenous (i.e., the control condition; triad n = 14) or the heterogeneous (i.e., the experimental
condition; triad n = 15) minimal group conditions. The average age of participants was 21.63 yrs
(SD = 6.75). There were 17 triads of female participants and 12 triads of the males. Most of the
participants were Caucasian (62.1%), followed by African American (16.1%), Other (12.6%),
Asian (5.7%), and Hispanic/Latino (3.4%).
Instruments
The drum set and the motion capture sensors were as described in Study 1. However,
there was no manipulation of the auditory and visual information in this study; participants could
hear and see each other without any constraints during the experiment. In addition, due to a

53
technical limitation, only movement data from the drumsticks were collected; the MIDI audio
was not recorded during this study.
Minimal group manipulation. At the beginning of the experiment, each group of three
participants was ostensibly tested for their music preference as a cover story for the minimal
group assignment. In this ‘music affiliativity’ test, the participants listened to nine short audio
clips, guessed a music genre of each clip from multiple choices, and ranked their preferences for
those clips. An experimenter pretended to grade their responses and gave the results back to the
participants. Unbeknownst to the participants, they were randomly assigned into one of two
bogus musical preferences: isorimi-firmus or plureriti-firmus. Participants who were assigned
into the former group would wear red caps during the experiment, while the latter group would
wear blue caps. To increase credibility of the cover story, a brief description of each musical
group was told to the participants; i.e., isoritmi-firmus describes people who can identify and
differentiate different patterns of pitches within a specific repeating rhythmic pattern, while
plureriti-firmus describes people who can identify and differentiate different patterns of pitches
in complementary repeating rhythmic patterns.
In a group of three participants, there are four permutations of possible minimal group
assignment: All three red caps, two red and one blue caps, one red and two blue caps, or all three
blue caps. However, because the minimal group identities are essentially equivalent and
symmetrical, half of the possible combinations are interchangeable with the other half. To
simplify the experimental conditions, only one homogeneous minimal group condition—a group
with all three red-cap participants—and one heterogeneous minimal group condition—a group
with two red-cap and one blue-cap participants—were utilized in this study.

54
Spontaneous and explicit drumming tasks. Two variations of the three-person
drumming task were used in this study. The first task was the spontaneous drumming task, which
was similar to Study 1’s task. Each of the three participants listened and drummed to slightly off-
set metronome beats at either 75, 80, or 85 bpm for 10 s. After the metronomes stopped, the
participants continued drumming at their given tempo for 80 s. The slight offsets of the
metronome were within ±10% of the middle tempo (i.e., 80 bpm). This spontaneous drumming
task was used to test the hypothesis that asymmetry in social identity would lead to asymmetry in
rhythmic coordination.
The second task was the explicit drumming task. The three participants were asked to
drum in the partial-inphase pattern (i.e., two participants drummed inphase and one participant
drummed antiphase with the first two). At the beginning of each trial, the participants discussed
and decided their drumming role. An 80-bpm metronome was played through audio speakers in
order to set the tempo for the drumming task. The continuation paradigm was utilized; the
metronome was played for first 10 s, and the trial continued for another 80 s. The second task
was designed to investigate two questions. First, do the decided drumming roles correspond to
each participant’s minimal group identity? Second, do participants who drum in a congruent role
with respect to their group identity coordinate better than those who adopt an incongruent role?
The symmetry of the participant’s drumming role was considered congruent with the symmetry
of his or her group identity when the red participant (i.e., a majority member) chose to drum
inphase and the blue participant (i.e., a minority member) chose to drum antiphase. In contrast,
the incongruent symmetry occurred when the blue member adopted the inphase drumming and
the red member drummed in the antiphase pattern.

55
Questionnaire. At the end of the experiment, the participants were asked to rate each of
the other participants on liking, similarity, and perceived coordination. The participants rated
each person to their left and right on a corresponding item.
Liking. The participants rated an item read, ‘Based on your impression, how much do
you like the participant sitting to your LEFT/RIGHT?’, on a scale of 1 (Not at all) to 7 (A lot).
Similarity. The participants rated an item read, ‘How similar are you and
the participant sitting to your LEFT/RIGHT?’, on a scale of 1 (Not at all like me) to 7 (Just like
me).
Perceived synchrony. The participants rated an item read, ‘How good was the
coordination between you and the participant sitting to your LEFT/RIGHT?’, on a scale of 1
(Very poor) to 7 (Very good).
Procedure
For each session, three participants were seated facing each other, forming a triangle,
with a drum pad in front of each of them. In contrast to the first experiment, the participants
could see each other. They were given the ‘musical affiliativity’ test, which was designed as a
cover story for the minimal group assignment. In the homogeneous minimal group condition, all
participants were assigned to the ‘isoritmi-firmus’ type and wore a red cap during the
experiment. The heterogeneous minimal group had two participants assigned into the ‘isoritmi-
firmus’ type, the red group, and one participant into the ‘plureriti-firmus’ type, the blue group.
After that, the participants first performed the spontaneous drumming task for six trials. Then
they performed the explicit drumming task for another six trials. During each trial of the second
task, the experimenter took note of the drumming roles that the participants decided among
themselves. Upon completion of the drumming tasks, the participants completed a questionnaire

56
and manipulation check. The participants were probed for any suspicion with funnel debriefing
questions. After that, the participants were debriefed about the actual purpose of the study.
Data Preparation, Reduction, and Analysis
Manipulation check. After completing the questionnaire, the participants were asked to
recall their cap’s color and identify any other participants who were in the same ‘musical
affiliativity’ group. One of the 87 participant incorrectly recalled his cap’s color. However, the
removal of this triad did not alter the results. In addition, among the 87 participants, seven of
them incorrectly identified the other participants who shared the same minimal group
assignment. After the funnel debriefing, seven participants reported suspicion that the cover story
for minimal group assignment was either fake or random. Nonetheless, the removal of these
participants and the triads to which they belonged did not change the results. These participants
were retained in the analysis.
Drumstick movement. The three-dimensional position time series of the drumstick
movement were trimmed to include the data from the 15th to the 85th second of the trial, resulting
in 70 s of time series data. There were five out of 1,044 trials that contained anomalies (e.g., the
participant accidentally dropped a drumstick) toward the beginning or the end of the remaining
70 s. Those five time series were further trimmed to remove the anomalous portion and resulted
in the shortest time series length of 60 s. Any time series that contain anomalies that resulted in a
reduction to less that 60 s were removed from the analysis. In addition, anomalies caused by
errors from the motion capture system (e.g., a blip in recording values) were removed and
interpolated using a cubic spline procedure. Twenty-three time series that could not be reliably
reconstructed were dropped from the analysis.

57
The remaining time series were subjected to the principal component analysis (PCA) to
determine the primary axis of drumstick movement. The primary axis was arranged so that the
peaks of the drumming cycle corresponded to the drumming event (i.e., when the drumstick hit
the pad). In 41 cases, from which the PCA could not successfully extract the primary movement
axis (e.g., due to nonstationary oscillatory movement), the primary axis was chosen from either
the x-, y-, or z-axis that best represented the drumming motion. Of these time series, 15 were
removed from the analysis because the drumming events could not be identified from the
movement. In total, 38 out of 1044 time series (3.6%) were excluded from the analysis.
The drumming events were calculated from the peaks of oscillation and were further used
in the calculation of drumming periods. Any periods that were larger than 1.5 times the target
periods (i.e., the period of 80 bpm is 0.75 s, and 0.75 ´ 1.5 = 1.125 s) were excluded from the
analysis.
Relative phase analysis. Both discrete and instantaneous relative phase could be derived
from the position data. The discrete relative phase (DRP) was calculated from the periods of the
drumming events, while the instantaneous relative phase was calculated from the drumstick
position time series. Both method of relative phase calculation yielded very similar results. For
the sake of consistency with Study 1, only the DRP is reported here.
Statistical analysis. Similar to Study 1, the marginal LMM was utilized to investigate the
effect of minimal group manipulation. The minimal group condition was a nested term with three
levels: The majority group, the minority group, and the control group. The majority and minority
group were nested in the experimental condition, while the control group was nested in the
control condition. Because the factors were not crossed, they could not be analyzed with the
ANOVA framework. However, the LMM framework allows a specification of such nested

58
effects. Estimated marginal means and standard errors were reported in the results section unless
otherwise mentioned.
Results
Spontaneous Drumming Task
Drumming periods. The means periods of the control condition (M = 0.73 s, SE =
0.006), the majority group (M = 0.72 s, SE = 0.007), and the minority group (M = 0.71 s, SE =
0.010) were not significantly different from one another, F(2, 83.14) = 1.42, p = .247. These
averages were slightly below the 80-bpm period of 0.75 s.
Period instability. The drumming period’s coefficient of variation served as a measure
of period instability. There were no significant differences in period instability between the
control condition (M = 0.07, SE = 0.003), the majority group (M = 0.07, SE = 0.003), and the
minority group (M = 0.06, SE = 0.004), F(2, 82.73) = 1.07, p = .346.
Discrete relative phase. The relative phase analysis was conducted for each pair within
the triad. The pairing fell into three categories: the pairs within the control conditions, the
ingroup-ingroup (red-red) pairs in the experimental condition, and the ingroup-outgroup (red-
blue) pairs in the experimental condition. The frequency distributions of relative phase for each
minimal group condition are shown in Figure 8. Overall, there was no substantial difference in
the distribution of % occurrence among the minimal group pairs. Most of the participants
demonstrated spontaneous inphase coordination with some degree of phase lag (~30°) with each
other.

59
Figure 8. Mean frequency distribution of relative phase for the spontaneous drumming task. Error bars represented bootstrapped 95% confidence intervals.
Coordination stability. The r values among the three pairings (Mcontrol = .56, SEcontrol =
.03; Mingroup-ingroup = .59, SEingroup-ingroup = .05; Mingroup-outgroup = .62, SEingroup-outgroup = .04) were not
significantly different from each other, F(2, 82.15) = 0.71, p = .494. The means values suggested
moderate degree of spontaneous coordination.
Explicit Drumming Task
In the second drumming task, the interaction between minimal group conditions and the
participant’s drumming role (i.e., inphase or antiphase) was investigated.
Drumming period. The main effect of minimal group condition and its interaction with
the drumming role on average period were not significant; F(2, 84.63) = 1.49, p = .232, and F(2,
257.49) = 0.01, p = .908, respectively. However, the main effect of drumming role was
significant, F(1, 257.34 = 14.89, p < .001. That is, the participants who chose to drum inphase
had shorter periods (M = 0.70 s, SE = 0.004) than those who drummed antiphase (M = 0.71 s, SE
= .004). The mean periods for each condition are shown in Table 4.
Period instability. A significant main effect of drumming role was also found on period
instability, F(1, 238.16) = 27.50, p < .001. The mean coefficient of variation was higher in the
antiphase drummers (M = 0.08, SE = 0.003) than in the inphase drummers (M = 0.06, SE =

60
0.003). The main effect of minimal group condition and the interaction effect were not
significant, F(2, 83.56) = 0.72, p = .489 and F(2, 239.10) = 0.36, p = .697, respectively.
Table 4
Estimated marginal means (and standard errors) of average period and period instability
Control Experimental
Majority Minority
Spontaneous Drumming Task
Period Mean 0.73 (0.006) 0.72 (0.007) 0.71 (0.010)
Period Instability 0.07 (0.003) 0.07 (0.003) 0.06 (0.004)
Explicit Drumming Task
Inphase Antiphase Inphase Antiphase Inphase Antiphase
Period Mean 0.71 (0.005) 0.72 (0.005) 0.70 (0.005) 0.71 (0.006) 0.70 (0.008) 0.71 (0.008)
Period Instability 0.07 (0.004) 0.08 (0.004) 0.07 (0.004) 0.08 (0.005) 0.06 (0.006) 0.07 (0.007)
Discrete relative phase. In the second drumming task, two modes of coordination—
inphase and antiphase—were expected. Figure 9 shows the frequency distributions of relative
phase by the minimal group pairs and the drumming role. The participants were able to drum
according to their chosen role. The inphase pairs showed stable inphase coordination (around -
40° to 40° bins), while the antiphase pairs demonstrated stable antiphase coordination (around -
180° to -140° bins and 140° to 180° bins). The minimal group pairing did not influence the
coordination during this task.

61
Figure 9. Mean frequency distribution of relative phase for the explicit drumming task. Error bars represented bootstrapped 95% confidence intervals.
Coordination stability. The stability of coordination was higher among the inphase
drummers (M = .86, SE = .018) than the antiphase pairs (M = .76, SE = .015), F(1, 284.83) =
33.53, p < .001. However, the effect pairing types and its interaction with the drumming role
were not significant; F(2, 86.98) = 1.06, p = .352, and F(2, 290.39) = 0.42, p = .652,
respectively. The means and standard errors are shown in Table 5.
Table 5
Estimated marginal means (and standard errors) of coordination stability (r) for each minimal
group pairing
Control Experimental
Ingroup-Ingroup Ingroup-Ingroup Ingroup-Outgroup
Spontaneous Drumming Task
.56 (.03) .59 (.05) .62 (.04)
Explicit Drumming Task
Inphase Antiphase Inphase Antiphase Inphase Antiphase
.87 (.02) .79 (.02) .83 (.04) .73 (.03) .86 (.03) .75 (.02)

62
Drumming role choice. Table 6 shows a cross tabulation of total drumming roles
choices from all trials. Most of the time, the participants followed the rotation symmetry. That is,
because the six total trials of the second task was a multiple of three, the participants decided to
rotate their drumming role and let everyone have an equal chance to drum in the antiphase role.
Table 6
Frequency (and expected frequency) of total chosen drumming roles from all trials during the
explicit partial-inphase drumming task
Minimal Group
Drumming Role Control Majority Minority Total
Inphase 168 (168) 124 (120) 56 (60) 348
Antiphase 84 (84) 56 (60) 34 (30) 174
Total 252 180 90 522
Questionnaire
The means of the questionnaire variables were reported in the actual group means instead
of the estimated marginal means (see Table 7).
Liking. Each participant rated their liking for the other two participants in the triad.
Hence, in the control condition, all participants rated the other two ingroup members (M = 5.29,
SD = 1.24). On the other hand, in the experimental condition, the majority group (i.e., red
participants) rated one ingroup member (M = 5.17, SD = 1.58) and one outgroup member (M =
5.50, SD = 1.41), and the minority group (i.e., blue participants) rated two outgroup members (M
= 5.43, SD = 1.10). The comparison of this nested effect showed that none of the liking means
were significantly different from each other, F(3, 84.65) = 0.55, p = 0.650.

63
Similarity. Each participant also rated their similarity to each of the other two
participants in the triad. Ratings of different target groups were not significantly different from
one another, F(3, 84.65) = 1.03, p = .383.
Perceived coordination. There was no significant effect of the target’s group
membership on perceived coordination, F(3, 84.64) = 1.09, p = .356.
Table 7
Means (and standard deviations) of liking, similarity, and perceived coordination of ingroup and
outgroup targets by minimal group conditions
Control Experimental
Majority Minority
Ingroup Ingroup Outgroup Outgroup
Liking 5.29 (1.24) 5.17 (1.58) 5.50 (1.41) 5.43 (1.10)
Similarity 4.18 (1.42) 4.43 (1.50) 4.50 (1.33) 3.83 (1.60)
Perceived Coordination 4.94 (1.36) 4.50 (1.48) 4.60 (1.57) 4.97 (1.52)
Discussion
Overall, the results suggested that the minimal group manipulation did not influence the
coordination among the participants in the drumming tasks. During the spontaneous drumming
task, inphase coordination emerged and was equally stable across the minimal group conditions.
The hypothesis that asymmetry in social identity would break the symmetry of spontaneous
coordination (Hypothesis 2.1) was not supported. In addition, beside the differences in periods
and coordination stability between inphase and antiphase coordination during the explicit partial-
inphase drumming task, no difference due to the minimal group manipulation was observed. The

64
participants successfully drummed to their respective drumming role (i.e., inphase or antiphase),
and their coordination was not effected by their minimal group identity.
Hypothesis 2.2, which suggested the outgroup participant would be more likely to choose
the antiphase drumming role during the second task, was not supported. The most common
solution to the role choice during the six trials of the second task was a role rotation. Such
solution matched the symmetry of the task constraints, and the minimal group manipulation was
not enough to break the attraction toward such symmetry.
Also, there was no difference in coordination of the congruent or incongruent symmetry
between the drumming role and the minimal group status. The participants in the minority group
did not show more stable coordination when they adopted the antiphase role than when they
adopted the inphase one. Although the participants in the majority group showed less stable
coordination during the antiphase role, antiphase coordination was less stable in general and was
not due to their minimal group status. Hence, Hypothesis 2.3 was not supported.
In sum, the minimal group manipulation did not produce a symmetry-breaking effect in
the three-person drumming task. It is worth noting that traditional interpersonal measures such as
liking and similarity did not vary as a function of the minimal group manipulation. Although one
plausible explanation is a failure of the manipulation to elicit any effect, an alternative
explanation is that the coordination during the experiment might neutralize any minimal group
effect, rendering its effect null. Further experiments are needed to test this notion.

65
Chapter 4
General Discussion
Asymmetric Informational Coupling Constraints
The aim of Study 1 was to demonstrate symmetry breaking of interpersonal coordination
as a function of asymmetry in perceptual coupling. However, the participants predominantly
showed spontaneous inphase coordination across the four coupling conditions (i.e., all-, partial-,
clamped- and rotation-coupling) with an exception of the 45-bpm partial-coupling condition,
where antiphase coordination occurred at about the same rate as inphase coordination. In other
words, the asymmetric auditory coupling constraints were not sufficient to induce corresponding
symmetry-breaking in the three-person interpersonal drumming task. Although the results did not
fully support the hypothesis, the informational coupling constraints had an effect of participants’
drumming period and their coordination when the target drumming frequency was at 45 bpm. At
this drumming frequency, directionality of informational coupling seems to play an important
role in explaining the effect of asymmetric coupling configurations.
First, the bidirectionally coupled oscillators had faster frequency than the unidirectionally
coupled oscillators, which in turn were faster than the non-coupled oscillators. As a group, triads
in the all-coupling, clamped-coupling, and rotation-coupling condition drummed faster than
those in the no-coupling and partial-coupling conditions, which drummed closer to the target
frequency (see Figure 2). The average period data in the no-coupling condition suggest that, even
at the slower 45 bpm, the participants were able to maintain their target frequency. However, this
drumming frequency was much slower than what people typically prefer (Moelants, 2002), and
the participants drifted toward the faster frequency when they were influenced by other
oscillators in the triad. The period shift might result from anticipation of signals from other

66
drummers, and the bidirectional coupling allowed the period shift to accumulate among the
oscillators over time via a positive feedback loop. The unidirectional coupling also influenced
period shift, although this influence was weaker than that of the bidirectional coupling. For
example, in the clamped-coupling condition, a clamped oscillator, which was unidirectionally
driven faster by the other two coupled oscillators in a triad, was still slower than the coupled
ones, suggesting weaker influences under the unidirectional coupling. Furthermore, in the
partial-coupling condition, an independent oscillator, which unidirectionally drove the other two
coupled oscillators, seemed to slow down the period shift among the coupled pairs. The
independent oscillator could maintain its period without being influenced by the rest of the group
and, at the same time, pulled the other two oscillators slower through its unidirectional influence.
As a result, participants in the partial-coupling condition, as a group, drummed at about the target
frequency. Nonetheless, the effect of unidirectional coupling on period shift was weaker than
that of the bidirectional coupling. Thus, in the partial-coupling condition, the coupled oscillators
were still faster than the independent oscillator (see Figure 3). As for the rotation-coupling
condition, which consisted of unidirectionally coupled oscillators in a ring formation, none of the
oscillators were totally uninfluenced. For example, Oscillator 1 might be unidirectionally
influenced by Oscillator 2, but, at the same time, Oscillator 1’s influence on Oscillator 3 would
indirectly influence Oscillator 2’s behavior. Therefore, the period shift could still occur via the
indirect positive feedback loop. In sum, the presence of bidirectional coupling could allow a
stronger phase shift than unidirectional coupling, which had a stronger effect than no coupling at
all. Nonetheless, the divergence of drumming periods in the partial-coupling and clamped-
coupling conditions illustrated that the collective behavior of the triads still depended on the
asymmetric coupling configuration.

67
Second, bidirectional coupling resulted in stronger coordination stability than
unidirectional coupling or no coupling. The coordination was strongest when the coupling
functions were bidirectional as in the all-coupling condition and weakest in the no-coupling
condition. The clamped-coupling condition also showed strong coordination stability because
both coupled oscillators were driving the clamped one. On the other hand, the partial-coupling
condition had weaker coordination stability than the all-coupling and clamped-coupling
conditions. As mentioned in the previous section on the period shift, asymmetric coupling in the
partial-coupling condition allowed the independent oscillator to perturb the coupled oscillators
and weaken the coordination stability. In addition, by being unidirectionally coupled to the rest
of the group, the coordination stability of the independent oscillator and the other two oscillators
was weaker than the stability among the coupled oscillators themselves. Moreover, the results
suggested that although an indirect positive feedback loop via unidirectional coupling in the
rotation-coupling condition could induce period shift, the direct bidirectional coupling as in the
all-coupling condition was more stable than the indirect coupling in the rotation-coupling
condition. The mutual direct influence between oscillators resulted in an emergence of a stronger
phase-locked pattern.
Third, to state the obvious, the effect of asymmetric coupling was not a sum of its pair-
wise coupling function, but a result of contextual constraints provided by the symmetry group.
The partial-coupling and clamped-coupling condition had the same pair-wise coupling functions:
One bidirectional and two unidirectional couplings. Nonetheless, the independent and the
clamped oscillators played different roles in the group coordination because of the imposed
constraints on the direction of informational flow. In the partial-coupling condition, the
independent oscillator perturbed the coordination of the bidirectionally coupled oscillators and

68
slowed down their frequency. In contrast, the clamped oscillator in the clamped-coupling
condition was driven by the rest of group, which resulted in faster periods and stable
coordination. Despite the linear increase in strength from unidirectional to bidirectional coupling,
the complex interaction between multiple oscillators must take into account the contextual
configuration of the group.
Drumming Frequency
Although the effect of asymmetric coupling on drumming periods was found, this was
only the case for the 45-bpm drumming frequency and did not occur in the 60-bpm condition.
While it may seem as if the 45-bpm drumming was less stable and, hence, being affected by
asymmetric coupling more than the 60-bpm drumming, there was no evidence from the analysis
that coordination in the 60-bpm condition was stronger than in the 45-bpm condition. While
spontaneous coordination at the 60-bpm did not require any period shift to be stable under
different coupling constraints, the period shift in the 45-bpm conditions might be a solution to
achieve a stable rhythm under some coupling conditions (i.e., all-coupling, clamped-coupling,
and rotation coupling) at the slower frequency. The larger deviation from human’s preferred
frequency of ~120 bpm combined with the positive feedback loop of influences seemed to
exacerbate the period shift in the drumming task. To determine a system’s stable solution in such
a situation, we must consider both frequency and coupling constraints.
Hypothesis 1.2 was partially supported as a higher proportion of antiphase coordination
was found in the 45-bpm partial-coupling condition than in other conditions. This result was also
consistent with the HBK model (Haken et al., 1985), which suggests bi-stability (i.e., inphase
and antiphase) when frequency is low. When the frequency increased to 60 bpm, the system
solutions seemed to collapse into a single mode, inphase.

69
The moderation effect of drumming frequency in Study 1 may shed light on the null
effect of social asymmetry in Study 2. If the effect of informational coupling started to disappear
even at 60 bpm, the participants in Study 2 who performed the task at 80 bpm might have even
smaller chances to break the symmetry of their coordination. Given the strength of the system’s
solution at this frequency, a minimal social constraint might not have been strong enough to have
an influence.
Social Constraints
Spontaneous coordination. While the goal of Study 2 was to test the hypothesis that
asymmetry in social identity would break the symmetry of interpersonal coordination during the
spontaneous drumming task, the null results suggested that the minimal group manipulation
could not induce symmetry-breaking of the coordination. Several possibilities or the combination
of them may be responsible for the null effects. First, as mentioned in the previous section, the
frequency constraints on the task might render other modes of coordination unstable. Given that
each participant could also see and hear all other participants in a triad, spontaneous coordination
in such a situation with no perceptual constraints might likely default to inphase coordination. In
other words, the constraints imposed by the minimal group manipulation could not break the
symmetry of the coupling between individuals in a triad. Second, the minimal group effect might
be overridden by the reciprocal nature of the drumming task. A typical minimal group paradigm
involves minimal or no interaction with other individuals (e.g., DiDonato, Ullrich, & Krueger,
2011; Gaertner & Insko, 2000; Tajfel, 1970). In a similar study on the effect of minimal group on
spontaneous coordination (Miles et al., 2011), the participants only unidirectionally coordinated
with a video stimulus on a pretense that it was a video link of another participant from a different
location. Nonetheless, the effective coupling was only unidirectional. The existence of

70
bidirectional coupling through perceptual information and co-present social interaction in the
current study might create a stronger attractor, regardless of the minimal group conditions. Third,
the synchronicity nature of the task might create a feeling of cooperation and entitativity (Lakens
& Stel, 2011) that diminished the minimal group effect. Such psychological effects might also
explain why none of the liking, similarity, and perceived coordination ratings varied as a
function of minimal group status. A fourth possibility also exists—the current minimal group
manipulation failed to produce any effect in the first place. Unfortunately, the current study’s
design did not provide a test to distinguish these possibilities. Nonetheless, considering the
established effect of the minimal group paradigm and spontaneous coordination, it is more
plausible that the current null effects were a combination of the frequency and coupling
constraints, which created a deep basin of attractor of inphase coordination.
Explicit coordination. Two hypotheses were tested in the second task of Study 2. First,
the minimal outgroup participants were expected to adopt the antiphase drumming role more
often than did the ingroup participants. Second, the participants who adopted a drumming role
that was not congruent with the symmetry group of their minimal group identity were expected
to be less stable than those who adopted a congruent role. None of these hypotheses were
supported.
For the first prediction, although asymmetry of minimal group status might prime the
participants to settle for roles that were congruent with the partial-inphase symmetry, !" # , the
symmetrical solution the role selection on six trials was to rotate the antiphase drummer role in
two rounds. As the results suggested, the minimal group manipulation was not able to break that
symmetry. A recent study showed that a systems’ solution tend to correspond with the symmetry
of highest order isotropy subgroup (Kijima, Shima, Okumura, Yamamoto, & Richardson, 2017).

71
In order words, when a higher order subgroup is plausible, the system is more likely to converge
to such symmetry. This phenomenon could be observed when biases or prejudices could not be
justified (Crandall & Eshleman, 2003). For example, when only given information on
socioeconomic status (SES) of a child, participants were reluctant to rely on the stereotype of
low and high SES to rate the child’s ability. However, when the SES data was accompanied by
additional information (i.e., a videotape of the child taking a test), participants who were led to
believe the child came from lower SES rated the child’s ability as below grade level, and the
opposite was true for participants who believed the child was from higher SES (Darley & Gross,
1983). Similarly, when the situation did not provide a cover for biases or prejudice, participants
would not avoid sharing a theater with a disable confederate (Snyder, Kleck, Strenta, & Mentzer,
1979). In the explicit task of Study 2, the highest order symmetry subgroup of the role choice
(not the coordination) was the !$ rotation symmetry. A break of symmetry with an outgroup
participant being chosen for the antiphase role more than twice would clearly reveal the bias due
to his or her outgroup status. Because the situational context did not justify such prejudice, the
discriminatory behavior was suppressed and the role assignment followed the most symmetrical
solution.
As for the second hypothesis, beside the fact that antiphase coordination tended to be less
stable regardless of the minimal group status, the congruency of the drumming role and minimal
group status did not affect coordination stability. The same explanation that the basin of
attraction was deep and stable at this drumming frequency might also apply here.
In summary, the main hypotheses that the asymmetry of informational coupling and
social context would induce the corresponding asymmetry in the interpersonal coordination were
not fully supported. However, asymmetric information coupling could shift the system’s

72
behavior, such as periods, when the system was far from its preferred frequency. Also, the
behavior of the system was not just a linear sum of its coupling function; the configuration or
structure of the coupling functions must also be considered.
Limitations & Future Research
One of the reason why the results were not as predicted might stem from the nature of the
three-person drumming task itself. While the task was chosen because it was free of hard
constraints and, hence, could embody all symmetry subgroups, the highest order subgroup, D3,
posed a challenge for a symmetry-breaking process. Softer constraints such as perceptual and
social information might only be effective when the system is in a multi-stable regime (e.g.,
lower frequency). Other researchers have avoided this issue by adopting a task that has built-in
constraints to avoid the D3 symmetry, such as a ball-possession task (Yokoyama & Yamamoto,
2011). Future research may incorporate hard constraints to contain the system within certain
symmetry subgroups and investigate the effect of low-energy constraints, such as perceptual or
social information, on the stability of coordination. Nonetheless, the three-person drumming task
was not without merit. Because the task embodies all isotropy subgroups, the symmetry-breaking
process could be brought about by a different approach to the task. For example, in a previous
study, Ariyabuddhiphongs and Richardson (2015, April) found that the triads of participants
were able to voluntarily coordinate in patterns from each symmetry subgroup. In other words,
intentions to perform an instructed pattern functioned as a constraint that breaks the symmetry of
the coupling between individuals in a triad. The current limitation of the spontaneous version of
the drumming task suggests that future research may focus on the symmetry breaking process as
a function of intentional constraints (Shaw, Kadar, Sim, & Repperger, 1992; Washburn, Coey,
Romero, Malone, & Richardson, 2015).

73
Another limitation of the current study was an inability to determine the cause of the
ineffective minimal group manipulation. Future studies should include another control condition
where the participants independently perform a task. That way, it could be determined whether
mutual synchrony overrides the effect of minimal group manipulation. In addition, for a face-to-
face coordination task, a stronger social manipulation may be needed. Future research may
explore the asymmetry related to more controversial topics such as political affiliation. Also, as
the justification-suppression model (Crandall & Eshleman, 2003) suggests, asymmetric task
constraints may provide a cover or justification for acting out prejudice, while symmetric task
constraints created ambiguity and attenuate it. Therefore, researchers may use the higher order
isotropy subgroup to identify task constraints that are congruent with the desired behavior.
In closing, Richardson and Kallen (2016) suggested that symmetry and symmetry-
breaking principles provide a useful framework to understand the organization of interpersonal
behavior. The application of symmetry theory and dynamical systems approaches in social
psychology is still relatively new, so a lot of work remains, and the field is filled with uncharted
territories. That said, the approach holds vast potential and will reward those who yearn for
discoveries in the frontier.

74
References
Adolphs, R. (2009). The social brain: Neural basis of social knowledge. Annual Review of
Psychology, 60, 693-716. doi: 10.1146/annurev.psych.60.110707.163514
Ajzen, I. (1991). The theory of planned behavior. Organizational Behavior and Human Decision
Processes, 50, 179-211. doi: 10.1016/0749-5978(91)90020-T
Ariyabuddhiphongs, K., & Richardson, M. J. (2015, April). Coordination patterns of three
coupled oscillators on a drumming task. Poster presented at the CAP Center Guy Van
Orden Research Conference, Cincinnati, OH.
Bargh, J. A., & Chartrand, T. L. (1999). The unbearable automaticity of being. American
Psychologist, 54, 462-479.
Bargh, J. A., Chen, M., & Burrows, L. (1996). Automaticity of social behavior: Direct effects of
trait construct and stereotype-activation on action. Journal of Personality and Social
Psychology, 71, 230-244.
Blaszczyk, J. W., & Klonowski, W. (2001). Postural stability and fractal dynamics. Acta
Neurobiologiae Experimentalis, 61, 105-112.
Buck, J., & Buck, E. (1976). Synchronous fireflies. Scientific American, 234(5), 74-85. doi:
10.1038/scientificamerican0576-74
Buckner, R. L., & Carroll, D. C. (2007). Self-projection and the brain. Trends in Cognitive
Sciences, 11, 49-57. doi: 10.1016/j.tics.2006.11.004
Chartrand, T. L., & Bargh, J. A. (1999). The chameleon effect: The perception-behavior link and
social interaction. Journal of Personality and Social Psychology, 76, 893-910.
Chartrand, T. L., Maddux, W. W., & Lakin, J. L. (2005). Beyond the perception-behavior link:
The ubiquitous utility and motivational moderators of nonconscious mimicry. In R. R.

75
Hassin, J. S. Uleman, & J. A. Bargh (Eds.), The new unconscious (pp. 334-361). New
York: Oxford University Press.
Coey, C. A., Hassebrock, J., Kloos, H., & Richardson, M. J. (2015). The complexities of keeping
the beat: Dynamical structure in the nested behaviors of finger tapping. Attention,
Perception, & Psychophysics, 77, 1423-1439. doi: 10.3758/s13414-015-0842-4
Collins, J. J., & Stewart, I. N. (1993). Coupled nonlinear oscillators and the symmetries of
animal gaits. Journal of Nonlinear Science, 3, 349-392. doi: 10.1007/BF02429870
Correll, J. (2008). 1/f noise and effort on implicit measures of bias. Journal of Personality and
Social Psychology, 94, 48-59. doi: 10.1037/0022-3514.94.1.48
Crandall, C. S., & Eshleman, A. (2003). A justification-suppression model of the expression and
experience of prejudice. Psychological Bulletin, 129, 414-446. doi: 10.1037/0033-
2909.129.3.414
Cuddy, A. J. C., Wilmuth, C. A., Yap, A. J., & Carney, D. R. (2015). Preparatory power posing
affects nonverbal presence and job interview performance. Journal of Applied
Psychology, 100, 1286-1295. doi: 10.1037/a0038543
Curie, P. (1894). Sur la symétrie dans les phénomènes physiques, symétrie d'un champ électrique
et d'un champ magnétique. Journal de Physique Théorique et Appliquée, 3, 393-415. doi:
10.1051/jphystap:018940030039300
Darley, J. M., & Gross, P. H. (1983). A hypothesis-confirming bias in labeling effects. Journal of
Personality and Social Psychology, 44, 20-33. doi: 10.1037/0022-3514.44.1.20
Decety, J., & Chaminade, T. (2003). When the self represents the other: A new cognitive
neuroscience view on psychological identification. Consciousness and Cognition, 12,
577-596. doi: 10.1016/s1053-8100(03)00076-x

76
DiDonato, T. E., Ullrich, J., & Krueger, J. I. (2011). Social perception as induction and
inference: An integrative model of intergroup differentiation, ingroup favoritism, and
differential accuracy. Journal of Personality and Social Psychology, 100, 66-83. doi:
10.1037/a0021051
Dijksterhuis, A., & Bargh, J. A. (2001). The perception-behavior expressway: Automatic effects
of social perception on social behavior. In P. Z. Mark (Ed.), Advances in Experimental
Social Psychology (Vol. 33, pp. 1-40). San Diego: Academic Press.
Donders, F. C. (1969). Over de snelheid van psychische processen [On the speed of
psychological processes] (W. Koster, Trans.). In W. Koster (Ed.), Attention and
performance: II. Amsterdam: North-Holland. (Original work published 1868)
Eiler, B. A., Kallen, R. W., Harrison, S. J., & Richardson, M. J. (2013). Origins of order in joint
activity and social behavior. Ecological Psychology, 25, 316-326. doi:
10.1080/10407413.2013.810107
Gaertner, L., & Insko, C. A. (2000). Intergroup discrimination in the minimal group paradigm:
Categorization, reciprocation, or fear? Journal of Personality and Social Psychology, 79,
77-94. doi: 10.1037/0022-3514.79.1.77
Gallese, V. (2003). The roots of empathy: The shared manifold hypothesis and the neural basis
of intersubjectivity. Psychopathology, 36, 171-180. doi: 10.1159/000072786
Gallese, V., & Goldman, A. (1998). Mirror neurons and the simulation theory of mind-reading.
Trends in Cognitive Sciences, 2, 493-501. doi: 10.1016/S1364-6613(98)01262-5
Gilbert, D. T., & Malone, P. S. (1995). The correspondence bias. Psychological Bulletin, 117,
21-38.

77
Goldman, A. I. (2006). Simulating minds : The philosophy, psychology, and neuroscience of
mindreading. New York, NY: Oxford University Press.
Golubitsky, M., & Stewart, I. (1985). Hopf bifurcation in the presence of symmetry. Archive for
Rational Mechanics and Analysis, 87, 107-165. doi: 10.1007/BF00280698
Golubitsky, M., & Stewart, I. (1986). Hopf bifurcation with dihedral group symmetry: Coupled
nonlinear oscillators. Contemporary Mathematics, 56, 131-173.
Golubitsky, M., & Stewart, I. (2003). The symmetry perspective: From equilibrium to chaos in
phase space and physical space. Basel, Switzerland: Birkhäuser Verlag.
Golubitsky, M., Stewart, I. N., & Schaeffer, D. G. (1988). Singularities and groups in
bifurcation theory (Vol. II). New York: Springer-Verlag.
Gottsdanker, R., & Shragg, G. P. (1985). Verification of Donders' subtraction method. Journal of
Experimental Psychology: Human Perception and Performance, 11, 765-776. doi:
10.1037/0096-1523.11.6.765
Haken, H., Kelso, J. A. S., & Bunz, H. (1985). A theoretical model of phase transitions in human
hand movements. Biological Cybernetics, 51, 347-356.
Hausdorff, J. M. (2007). Gait dynamics, fractals and falls: Finding meaning in the stride-to-stride
fluctuations of human walking. Human Movement Science, 26, 555-589. doi:
10.1016/j.humov.2007.05.003
Hausdorff, J. M., Mitchell, S. L., Firtion, R., Peng, C. K., Cudkowicz, M. E., Wei, J. Y., &
Goldberger, A. L. (1997). Altered fractal dynamics of gait: Reduced stride-interval
correlations with aging and Huntington's disease. Journal of Applied Physiology, 82, 262-
269.

78
Herrmann, E., Call, J., Hernàndez-Lloreda, M. V., Hare, B., & Tomasello, M. (2007). Humans
have evolved specialized skills of social cognition: The Cultural Intelligence Hypothesis.
Science, 317, 1360-1366.
Holden, J. G., & Rajaraman, S. (2012). The self-organization of a spoken word. Frontiers in
Psychology, 3, 209. doi: 10.3389/fpsyg.2012.00209
Hommel, B., Müsseler, J., Aschersleben, G., & Prinz, W. (2001). The theory of event coding
(TEC): A framework for perception and action planning. Behavioral and Brain Sciences,
24, 849-937.
Horner, V., & Whiten, A. (2004). Causal knowledge and imitation/emulation switching in
chimpanzees (Pan troglodytes) and children (Homo sapiens). Animal Cognition, 8, 164-
181. doi: 10.1007/s10071-004-0239-6
Iacoboni, M. (2009). Imitation, empathy, and mirror neurons. Annual Review of Psychology, 60,
653-670. doi: 10.1146/annurev.psych.60.110707.163604
Iacoboni, M., Molnar-Szakacs, I., Gallese, V., Buccino, G., Mazziotta, J. C., & Rizzolatti, G.
(2005). Grasping the intentions of others with one's own mirror neuron system. PLoS
Biology, 3(3), e79. doi: 10.1371/journal.pbio.0030079
Jensen, H. J. (1998). Self-organized criticality. Cambridge, England: Cambridge University
Press.
Jordan, J. S., & Ghin, M. (2006). (Proto-) consciousness as a contextually emergent property of
self-sustaining systems. Mind & Matter, 4, 45-68.
Katsuta, Y., & Kawakami, H. (2006). Four-phase oscillations observed in two oscillators coupled
with nonlinear inductors. Electronics and Communications in Japan, 89, 15-21. doi:
10.1002/ecjc.20196

79
Kelley, H. H., & Michela, J. L. (1980). Attribution theory and research. Annual Review of
Psychology, 31, 457-501. doi: 10.1146/annurev.ps.31.020180.002325
Kelso, J. A. S. (1984). Phase transitions and critical behavior in human bimanual coordination.
American Journal of Physiology - Regulatory, Integrative and Comparative Physiology,
246, R1000-R1004.
Kijima, A., Shima, H., Okumura, M., Yamamoto, Y., & Richardson, M. (2017). Effects of agent-
environment symmetry on the coordination dynamics of triadic jumping. Frontiers in
Psychology, 8(3). doi: 10.3389/fpsyg.2017.00003
Knoblich, G., & Sebanz, N. (2008). Evolving intentions for social interaction: From entrainment
to joint action. Philosophical Transactions of the Royal Society B: Biological Sciences,
363, 2021-2031. doi: 10.1098/rstb.2008.0006
Lakens, D., & Stel, M. (2011). If they move in sync, they must feel in sync: Movement
synchrony leads to attributions of rapport and entitativity. Social Cognition, 29, 1-14.
Lakin, J. L., Chartrand, T. L., & Arkin, R. M. (2008). I am too just like you: Nonconscious
mimicry as an automatic behavioral response to social exclusion. Psychological Science,
19, 816-822. doi: 10.1111/j.1467-9280.2008.02162.x
Lopresti-Goodman, S. M., Richardson, M. J., Silva, P. L., & Schmidt, R. C. (2008). Period basin
of entrainment for unintentional visual coordination. Journal of Motor Behavior, 40, 3-
10. doi: 10.3200/JMBR.40.1.3-10
Lumsden, J., Miles, L. K., Richardson, M. J., Smith, C. A., & Macrae, C. N. (2012). Who syncs?
Social motives and interpersonal coordination. Journal of Experimental Social
Psychology, 48, 746-751. doi: 10.1016/j.jesp.2011.12.007

80
Macdonald, J. H. G. (2008). Pedestrian-induced vibrations of the Clifton Suspension Bridge,
UK. Proceedings of the Institution of Civil Engineers - Bridge Engineering, 161, 69-77.
doi: 10.1680/bren.2008.161.2.69
Macdonald, J. H. G. (2009). Lateral excitation of bridges by balancing pedestrians. Proceedings
of the Royal Society A: Mathematical, Physical and Engineering Sciences, 465, 1055-
1073. doi: 10.1098/rspa.2008.0367
MacDougall, H. G., & Moore, S. T. (2005). Marching to the beat of the same drummer: the
spontaneous tempo of human locomotion. Journal of Applied Physiology, 99, 1164-1173.
doi: 10.1152/japplphysiol.00138.2005
Maner, J. K., DeWall, C. N., Baumeister, R. F., & Schaller, M. (2007). Does social exclusion
motivate interpersonal reconnection? Resolving the "porcupine problem.". Journal of
Personality and Social Psychology, 92, 42-55. doi: 10.1037/0022-3514.92.1.42
Meltzoff, A. N. (2007). ‘Like me’: A foundation for social cognition. Developmental Science,
10, 126-134. doi: 10.1111/j.1467-7687.2007.00574.x
Miles, L. K., Griffiths, J. L., Richardson, M. J., & Macrae, C. N. (2010). Too late to coordinate:
Contextual influences on behavioral synchrony. European Journal of Social Psychology,
40, 52-60. doi: 10.1002/ejsp.721
Miles, L. K., Lumsden, J., Richardson, M. J., & Macrae, C. N. (2011). Do birds of a feather
move together? Group membership and behavioral synchrony. Experimental Brain
Research, 211, 495-503. doi: 10.1007/s00221-011-2641-z
Miles, L. K., Nind, L. K., & Macrae, C. N. (2009). The rhythm of rapport: Interpersonal
synchrony and social perception. Journal of Experimental Social Psychology, 45, 585-
589. doi: 10.1016/j.jesp.2009.02.002

81
Mischel, W., & Shoda, Y. (2008). Toward a unified theory of personality. In O. P. John, R. W.
Robins, & L. A. Pervin (Eds.), Handbook of personality: Theory and reserach (3 ed.).
New York, NY: Guilford Press.
Moelants, D. (2002). Preferred tempo reconsidered. Paper presented at the Proceedings of the
7th International Conference on Music Perception and Cognition, Sydney.
Muijres, F. T., & Dickinson, M. H. (2014). Bird flight: Fly with a little flap from your friends.
Nature, 505, 295-296. doi: 10.1038/505295a
Pikovsky, A., Rosenblum, M., & Kurths, J. (2001). Synchronization : A universal concept in
nonlinear sciences. Cambridge, NY: Cambridge University Press.
Premack, D. (2010). Why humans are unique: Three theories. Perspectives on Psychological
Science, 5, 22-32.
Premack, D., & Woodruff, G. (1978). Does the chimpanzee have a theory of mind? Behavioral
and Brain Sciences, 4, 515-526.
Read, S. J., Monroe, B. M., Brownstein, A. L., Yang, Y., Chopra, G., & Miller, L. C. (2010). A
neural network model of the structure and dynamics of human personality. Psychological
Review, 117, 61-92. doi: 10.1037/a0018131
Richardson, M. J., Garcia, R. L., Frank, T. D., Gregor, M., & Marsh, K. L. (2012). Measuring
group synchrony: A cluster-phase method for analyzing multivariate movement time-
series. Frontiers in Physiology, 3, 405. doi: 10.3389/fphys.2012.00405
Richardson, M. J., Harrison, S. J., Kallen, R. W., Walton, A., Eiler, B. A., Saltzman, E., &
Schmidt, R. C. (2015). Self-organized complementary joint action: Behavioral dynamics
of an interpersonal collision-avoidance task. Journal of Experimental Psychology:
Human Perception and Performance, 41, 665-679. doi: 10.1037/xhp0000041

82
Richardson, M. J., & Kallen, R. W. (2016). Symmetry-breaking and the contextual emergence of
human multiagent coordination and social activity. In E. Dzhafarov, J. S. Jordan, R.
Zhang, & V. Cervantes (Eds.), Contextuality from quantum physics to psychology (pp.
229-286). Singapore: World Scientific.
Richardson, M. J., Marsh, K. L., Isenhower, R. W., Goodman, J. R. L., & Schmidt, R. C. (2007).
Rocking together: dynamics of intentional and unintentional interpersonal coordination.
Human Movement Science, 26, 867-891. doi: 10.1016/j.humov.2007.07.002
Richardson, M. J., Marsh, K. L., & Schmidt, R. C. (2005). Effects of visual and verbal
interaction on unintentional interpersonal coordination. Journal of Experimental
Psychology: Human Perception and Performance, 31, 62-79. doi: 10.1037/0096-
1523.31.1.62
Riley, M. A., Kuznetsov, N., & Bonnette, S. (2011). State-, parameter-, and graph-dynamics:
Constraints and the distillation of postural control systems. Science & Motricité, 74, 5-18.
doi: 10.1051/sm/2011117
Rosen, J. (1995). Symmetry in science: An introduction to the general theory. New York, NY:
Springer-Verlag.
Saltzman, E. L., & Munhall, K. G. (1992). Skill acquisition and development: The roles of state-,
parameter-, and graph-dynamics. Journal of Motor Behavior, 24, 49-57. doi:
10.1080/00222895.1992.9941600
Schelling, T. C. (1971). Dynamic models of segregation. Journal of Mathematical Sociology, 1,
143-186. doi: 10.1080/0022250X.1971.9989794
Schmidt, R. C., Bienvenu, M., Fitzpatrick, P. A., & Amazeen, P. G. (1998). A comparison of
intra- and interpersonal interlimb coordination: coordination breakdowns and coupling

83
strength. Journal of Experimental Psychology: Human Perception and Performance, 24,
884-900.
Schmidt, R. C., Carello, C., & Turvey, M. T. (1990). Phase transitions and critical fluctuations in
the visual coordination of rhythmic movements between people. Journal of Experimental
Psychology: Human Perception and Performance, 16, 227-247. doi: 10.1037/0096-
1523.16.2.227
Schmidt, R. C., Fitzpatrick, P., Caron, R., & Mergeche, J. (2011). Understanding social motor
coordination. Human Movement Science, 30, 834-845. doi: 10.1016/j.humov.2010.05.014
Schmidt, R. C., & O'Brien, B. (1997). Evaluating the dynamics of unintended interpersonal
coordination. Ecological Psychology, 9, 189-206. doi: 10.1207/s15326969eco0903_2
Schmidt, R. C., & Richardson, M. J. (2008). Dynamics of interpersonal coordination. In A.
Fuchs & V. K. Jirsa (Eds.), Coordination: Neural, behavioral and social dynamics (pp.
281-308). Berlin, Heidelberg: Springer Berlin Heidelberg.
Schmidt, R. C., & Turvey, M. T. (1994). Phase-entrainment dynamics of visually coupled
rhythmic movements. Biological Cybernetics, 70, 369-376. doi: 10.1007/bf00200334
Shaw, R. E., Kadar, E., Sim, M., & Repperger, D. W. (1992). The intentional spring: a strategy
for modeling systems that learn to perform intentional acts. Journal of Motor Behavior,
24, 3-28. doi: 10.1080/00222895.1992.9941598
Sherif, M., Harvey, O. J., White, B. J., Hood, W. R., & Sherif, C. W. (1961). Intergroup conflict
and cooperation: The Robbers Cave experiment. Norman, OK: University of Oklahoma
Book Exchange.
Shockley, K., Richardson, D. C., & Dale, R. (2009). Conversation and coordinative structures.
Topics in Cognitive Science, 1, 305-319. doi: 10.1111/j.1756-8765.2009.01021.x

84
Simon, H. A. (1973). The organization of complex systems. In H. H. Pattee (Ed.), Hierarchy
theory: The challenge of complex systems (pp. 1-27). New York, NY: Braziller.
Snyder, M. L., Kleck, R. E., Strenta, A., & Mentzer, S. J. (1979). Avoidance of the handicapped:
An attributional ambiguity analysis. Journal of Personality and Social Psychology, 37,
2297-2306. doi: 10.1037/0022-3514.37.12.2297
Stel, M., van Baaren, R. B., Blascovich, J., van Dijk, E., McCall, C., Pollmann, M. M. H., . . .
Vonk, R. (2010). Effects of a priori liking on the elicitation of mimicry. Experimental
Psychology, 57, 412-418. doi: 10.1027/1618-3169/a000050
Sternberg, S. (1969). The discovery of processing stages: Extensions of Donders' method. Acta
Psychologica, 30, 276-315. doi: 10.1016/0001-6918(69)90055-9
Strogatz, S. H., Abrams, D. M., McRobie, A., Eckhardt, B., & Ott, E. (2005). Theoretical
mechanics: Crowd synchrony on the Millennium Bridge. Nature, 438, 43-44.
Strogatz, S. H., & Stewart, I. (1993). Coupled oscillators and biological synchronization.
Scientific American, 269(6), 102-109.
Tajfel, H. (1970). Experiments in intergroup discrimination. Scientific American, 223(5), 96-102.
doi: 10.1038/scientificamerican1170-96
Takamatsu, A., Tanaka, R., Yamada, H., Nakagaki, T., Fujii, T., & Endo, I. (2001).
Spatiotemporal symmetry in rings of coupled biological oscillators of Physarum
plasmodial slime mold. Physical Review Letters, 87, 078102. doi:
10.1103/PhysRevLett.87.078102
Tesser, A. (1980). When individual dispositions and social pressure conflict: A catastrophe.
Human Relations, 33, 393-407.

85
Tesser, A., McMillen, R., & Collins, J. (1997). Chaos: On making a convincing case for social
psychology. Psychological Inquiry, 8, 137-143. doi: 10.1207/s15327965pli0802_10
Tomasello, M., & Carpenter, M. (2007). Shared intentionality. Developmental Science, 10, 121-
125. doi: 10.1111/j.1467-7687.2007.00573.x
Turvey, M. T. (1990). Coordination. American Psychologist, 45, 938-953. doi: 10.1037/0003-
066X.45.8.938
Valdesolo, P., Ouyang, J., & DeSteno, D. (2010). The rhythm of joint action: Synchrony
promotes cooperative ability. Journal of Experimental Social Psychology, 46, 693-695.
doi: 10.1016/j.jesp.2010.03.004
van Baaren, R., Janssen, L., Chartrand, T. L., & Dijksterhuis, A. (2009). Where is the love? The
social aspects of mimicry. Philosophical Transactions of the Royal Society B: Biological
Sciences, 364, 2381-2389. doi: 10.1098/rstb.2009.0057
Van Orden, G. C., & Holden, J. G. (2002). Intentional contents and self-control. Ecological
Psychology, 14, 87-109.
Van Orden, G. C., Holden, J. G., & Turvey, M. T. (2003). Self-organization of cognitive
performance. Journal of Experimental Psychology: General, 132, 331-350. doi:
10.1037/0096-3445.132.3.331
Van Orden, G. C., Holden, J. G., & Turvey, M. T. (2005). Human cognition and 1/f scaling.
Journal of Experimental Psychology: General, 134, 117-123. doi: 10.1037/0096-
3445.134.1.117
Varlet, M., & Richardson, M. J. (2011). Computation of continuous relative phase and
modulation of frequency of human movement. Journal of Biomechanics, 44, 1200-1204.
doi: 10.1016/j.jbiomech.2011.02.001

86
Washburn, A., Coey, C. A., Romero, V., Malone, M., & Richardson, M. J. (2015). Interaction
between intention and environmental constraints on the fractal dynamics of human
performance. Cognitive Processing, 16, 343-350. doi: 10.1007/s10339-015-0652-6
Wheat, J. S., & Glazier, P. S. (2006). Measuring coordination and variability in coordination. In
K. Davids, S. Bennett, & K. Newell (Eds.), Movement system variability (pp. 167-182).
Champaign, IL: Human Kinetics.
Williams, K. D., Cheung, C. K. T., & Choi, W. (2000). Cyberostracism: Effects of being ignored
over the Internet. Journal of Personality and Social Psychology, 79, 748-762. doi:
10.1037/0022-3514.79.5.748
Wiltermuth, S. S., & Heath, C. (2009). Synchrony and cooperation. Psychological Science, 20,
1-5. doi: 10.1111/j.1467-9280.2008.02253.x
Wong, E. A., Vallacher, R. R., & Nowak, A. (2014). Fractal dynamics in self-evaluation reveal
self-concept clarity. Nonlinear Dynamics, Psychology, and Life Sciences, 18, 349-369.
Yokoyama, K., & Yamamoto, Y. (2011). Three people can synchronize as coupled oscillators
during sports activities. PLoS Computational Biollogy, 7(10), e1002181. doi:
10.1371/journal.pcbi.1002181
Yu, H., Russell, D. M., & Sternad, D. (2003). Task-effector asymmetries in a rhythmic
continuation task. Journal of Experimental Psychology: Human Perception and
Performance, 29, 616-630. doi: 10.1037/0096-1523.29.3.616
Zamm, A., Wellman, C., & Palmer, C. (2016). Endogenous rhythms influence interpersonal
synchrony. Journal of Experimental Psychology: Human Perception and Performance,
42, 611-616. doi: 10.1037/xhp0000201