Embed Size (px)
Citation preview

Int J Interact Des ManufDOI 10.1007/s12008-012-0168-6
SHORT ORIGINAL PAPER
Symmetry line detection for non-erected postures
L. Di Angelo · P. Di Stefano · A. Spezzaneve
Received: 25 July 2011 / Accepted: 24 September 2012© Springer-Verlag France 2012
Abstract In this work, a new technique for symmetry linedetection for non-erected postures, which can not be inves-tigated with the other methods presented in the literature, isproposed. It evaluates the symmetry line by means an adaptiveprocess in which a first attempt is modified step by step untilthe solution converges to the best estimation. The methodhere proposed is validated by analysing four different non-erected postures in which the spine does not lie onto sagittalplane, by the comparison with the traditional approach tosymmetry line detection, having as reference the cutaneousmarking. Results are analysed and critically discussed.
Keywords Rasterstereography · Back shape analysis ·Symmetry line · Posture prediction · Anatomical landmarks
1 Introduction and related works
Studies, described in published literature, demonstrate thatthe curvature of the spine is one of the most important char-acteristics for determining posture, intervertebral disc loadsand stresses and musculoskeletal injuries [1]. Such consid-erations have led ergonomics researchers to pay particularattention to the posture analysis and prediction for differentworker’s typologies [2].
L. Di Angelo · P. Di Stefano (B)Department of Industrial and Information Engineeringand Economics, University of L’Aquila, L’Aquila, Italye-mail: [email protected]
L. Di Angeloe-mail: [email protected]
A. SpezzaneveDepartment of Mechanical Engineering, Energy and Management,University of L’Aquila, L’Aquila, Italye-mail: [email protected]
Nowadays the traditional techniques for posture and ver-tebral column detection, based on cutaneous marking canbe replaced by modern techniques based on 3D scanner use[3,4,9]. These techniques offer new detection and diagnos-tic capacities: 3D scanners are not invasive, they give accu-rate measurements with acceptable costs and prevent posturedetection from being conditioned by the instrument. Never-theless, the geometric data relating to a subject’s back, asthose obtained by means of a 3D geometric scanning (pointcloud), cannot be directly used for posture analysis. Dataprocessing becomes, therefore, necessary in order to recog-nize the characteristic elements to identify the spatial con-figuration of the vertebral column. This configuration, basedon external detection, is given by the position of the verte-bral apophyses (symmetry line); from the symmetry line andtaking into account the thickness of the soft parts the spinalmidline could be determined [4]. The first approach, whichhas been presented for the determination of symmetry line andfor starting to three-dimensional acquisition of the back, wasproposed by Turner-Smith [5] by the using of landmarks thatare positioned in correspondence to the position of the ver-tebrae spinal apophyses by means of manual palpation. Thesymmetry line is determined as the broken line which joins thebarycentre of each marker. A similar approach was used byPazos et al. [6], and by Bergeron et al. [7] The principal limitof these methods is due to the necessity of applying markers.The other methodology, which has been already validated inclinical field, was proposed by Drerup and Hierholzer [4].The back surface is sliced with planes perpendicular to ver-tical axis. For each slice curve the point representative ofthe position of the spine is associated to the minimum valueof lateral asymmetry function based of the evaluation of theMean and Gaussian curvatures. Huysmans et al. [3] proposea complex methodology based on the analysis of curves thatare obtained sectioning with horizontal planes the surface of
123
Int J Interact Des Manuf
the acquired back. This methodology requires some coeffi-cients (weight factors) evaluated on average individuals andthat cannot take into account the variety of real subjects. Inorder to analyse the back sectioning profiles Santiesteban etal. [8] define the asymmetry function expressed in terms ofsecond derivatives on the profile. In a previous work [9] theauthors introduced an original symmetry index (SI) based onthe analysis of the symmetry in the orientation of the normalvectors of horizontal sections of the back surface.
Since the symmetry line representation gives informa-tion about the posture correctness assumed by the subject,it becomes important displaying postures that are closer tothose of workers in the workplace. All the above mentionedmethods evaluate the symmetry line by analysing horizon-tal planar sections. The horizontal slicing methods performgood results only for upright or sitting postures, but workerspostures can be identified in a wider set of spine configura-tions. In order to analyse postures or movements which giverise spine configurations outside sagittal plane, the methodspresented in the literature are not adequate.
In order to overcome the limitations of the previously men-tioned methods, a new method (called NEPA: Non-ErectedPosture Approach), based on an adaptive process is presentedin this paper. The method performs the evaluation of the bestset of sectioning planes suited to identify symmetry line. Itis tested in some real cases and compared with traditionalapproach having as reference the cutaneous marking. In par-ticular test cases refer to the analysis of twisted and laterallyflexed postures.
2 Definitions
Three basic reference planes are typically used in humananatomy: sagittal, coronal, and transversal. In upright pos-ture sagittal plane divides the human body into two specularportions; coronal plane divides the body into dorsal and ven-tral portions; transversal is a plane orthogonal to the othersand, in the case of erected postures, it is a horizontal plane.By the intersection of these planes it is possible to identify thethree reference axes: longitudinal axis (obtained by the inter-section of the sagittal and the coronal planes), coronal axis(formed by the intersection of the sagittal and the transversalplanes) and sagittal axis (resulting by the intersection of thecoronal and the transversal planes).
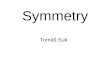
In this work in order to analyze non-erected postures, alocal reference system OL, ξL,ψL, ζL is introduced. Thislocal frame is defined by the local coronal axis (ξL), thelocal sagittal axis (ψL), and by the local longitudinal axis(ζL). Local reference system can be associated to the Frenet-Serret frame of the symmetry line: ζL(t) is the tangent of thesymmetry line in OL(t),ψL(t) is the normal of the symmetryline in OL(t) and ξ L (t) is perpendicular to the other two.
Fig. 1 Local reference systems
So, ξ L (t) andψL(t) define the local transversal plane (Π (t)),ζL(t) andψL(t) define the local sagittalplane, ζL(t) and ξ L (t)define the local coronal plane. The origin (OL) is a point ofthe symmetry line. Since the symmetry line is defined by aparametric curve, the local frame is a function of the sameparameter of the curve (Fig. 1):{OL, ξL,ψL, ζL
} = Φ(t) (1)
3 Proposed method
The method here proposed consists of the following steps:
1. 3D acquisition of subject’s back;2. Estimation of the symmetry line of the first attempt;3. Refinement of the symmetry line estimation.
3.1 3D acquisition of subject’s back
The geometry of the back is acquired using a 3D geomet-ric scanner which gives the possibility to acquire the wholegeometry of the back with a unique scanning. The back acqui-sition must be performed completely and symmetrically tothe vertebral column as possible. After the acquisition, thepoint cloud is smoothed with a Gaussian filter and, then, itis tessellated and transformed into Eulerian geometric mod-els connecting each point by triangles. This filtering is not acritical phase of the method but it is useful to reduce outliersand large noise.
3.2 Estimation of the symmetry line of the first attempt
In order to perform the first attempt solution, a globalreference system {OG, ξG,ψG, ζG} is introduced. It is a
123
Int J Interact Des Manuf
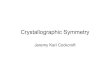
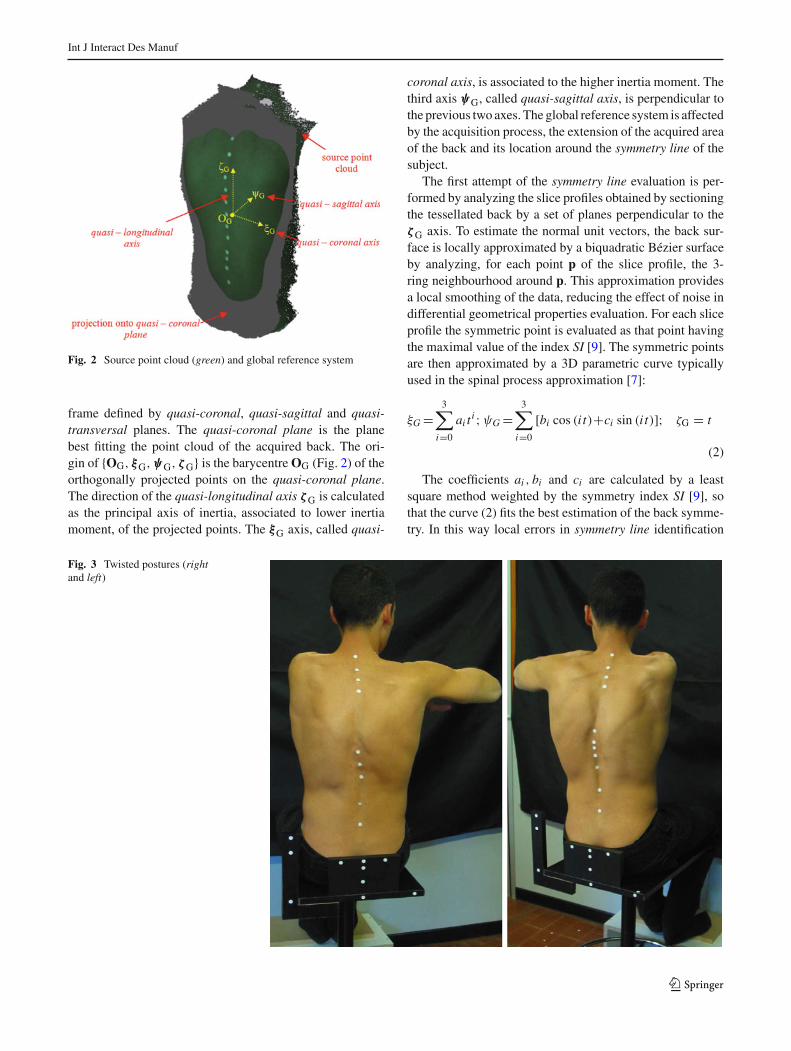
Fig. 2 Source point cloud (green) and global reference system
frame defined by quasi-coronal, quasi-sagittal and quasi-transversal planes. The quasi-coronal plane is the planebest fitting the point cloud of the acquired back. The ori-gin of {OG, ξG,ψG, ζG} is the barycentre OG (Fig. 2) of theorthogonally projected points on the quasi-coronal plane.The direction of the quasi-longitudinal axis ζG is calculatedas the principal axis of inertia, associated to lower inertiamoment, of the projected points. The ξG axis, called quasi-
coronal axis, is associated to the higher inertia moment. Thethird axis ψG, called quasi-sagittal axis, is perpendicular tothe previous two axes. The global reference system is affectedby the acquisition process, the extension of the acquired areaof the back and its location around the symmetry line of thesubject.
The first attempt of the symmetry line evaluation is per-formed by analyzing the slice profiles obtained by sectioningthe tessellated back by a set of planes perpendicular to theζG axis. To estimate the normal unit vectors, the back sur-face is locally approximated by a biquadratic Bézier surfaceby analyzing, for each point p of the slice profile, the 3-ring neighbourhood around p. This approximation providesa local smoothing of the data, reducing the effect of noise indifferential geometrical properties evaluation. For each sliceprofile the symmetric point is evaluated as that point havingthe maximal value of the index SI [9]. The symmetric pointsare then approximated by a 3D parametric curve typicallyused in the spinal process approximation [7]:
ξG =3∑
i=0
ai ti ;ψG =
3∑
i=0
[bi cos (i t)+ci sin (i t)]; ζG = t
(2)
The coefficients ai , bi and ci are calculated by a leastsquare method weighted by the symmetry index SI [9], sothat the curve (2) fits the best estimation of the back symme-try. In this way local errors in symmetry line identification
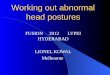
Fig. 3 Twisted postures (rightand left)
123
Int J Interact Des Manuf
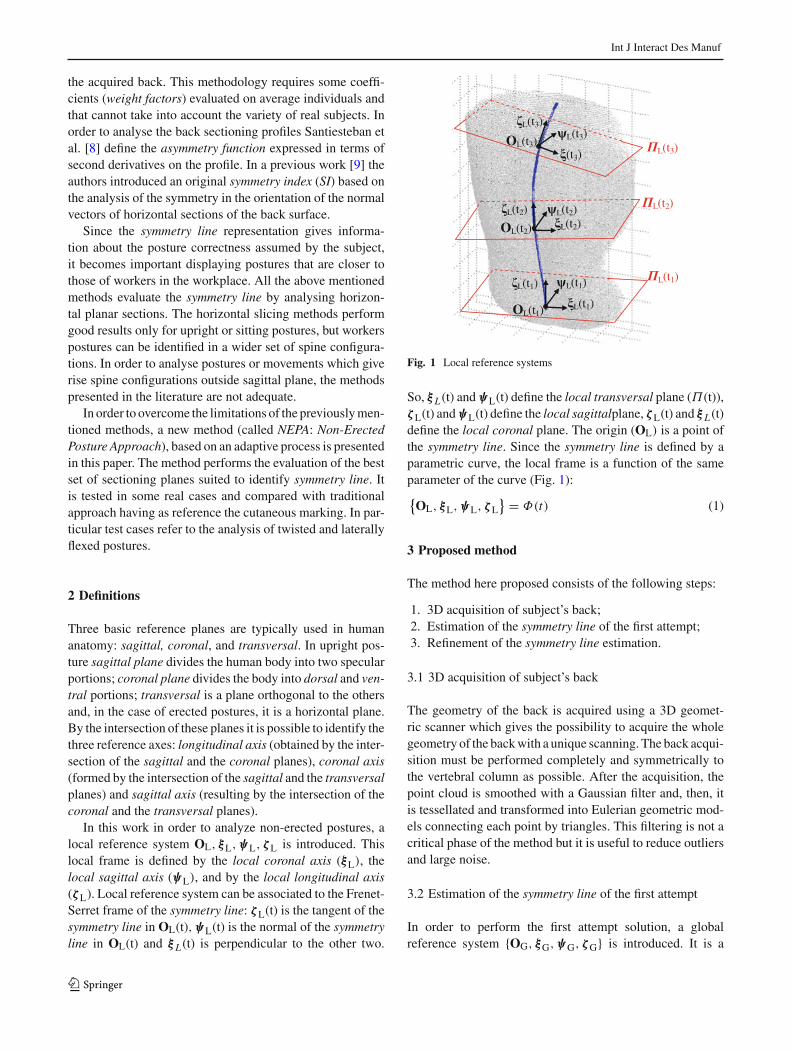
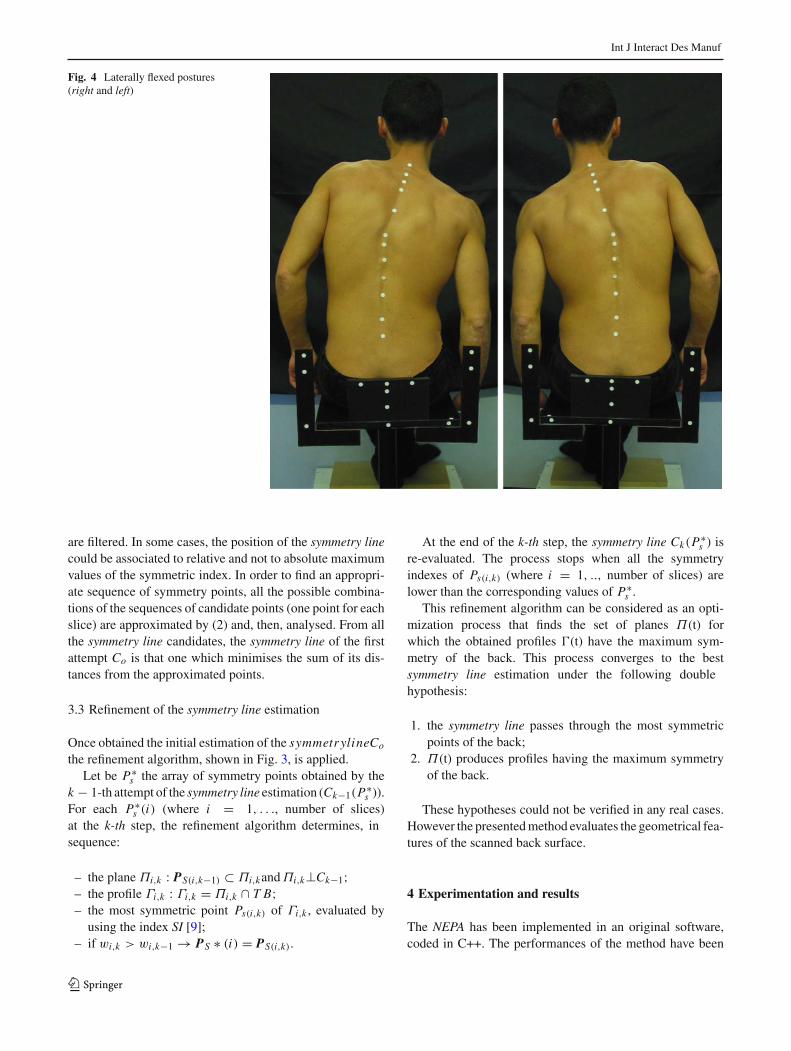
Fig. 4 Laterally flexed postures(right and left)
are filtered. In some cases, the position of the symmetry linecould be associated to relative and not to absolute maximumvalues of the symmetric index. In order to find an appropri-ate sequence of symmetry points, all the possible combina-tions of the sequences of candidate points (one point for eachslice) are approximated by (2) and, then, analysed. From allthe symmetry line candidates, the symmetry line of the firstattempt Co is that one which minimises the sum of its dis-tances from the approximated points.
3.3 Refinement of the symmetry line estimation
Once obtained the initial estimation of the symmetrylineCo
the refinement algorithm, shown in Fig. 3, is applied.Let be P∗
s the array of symmetry points obtained by thek − 1-th attempt of the symmetry line estimation (Ck−1(P∗
s )).For each P∗
s (i) (where i = 1, . . ., number of slices)at the k-th step, the refinement algorithm determines, insequence:
– the plane Πi,k : PS(i,k−1) ⊂ Πi,kandΠi,k⊥Ck−1;– the profile Γi,k : Γi,k = Πi,k ∩ T B;– the most symmetric point Ps(i,k) of Γi,k , evaluated by
using the index SI [9];– if wi,k > wi,k−1 → PS ∗ (i) = PS(i,k).
At the end of the k-th step, the symmetry line Ck(P∗s ) is
re-evaluated. The process stops when all the symmetryindexes of Ps(i,k) (where i = 1, .., number of slices) arelower than the corresponding values of P∗
s .This refinement algorithm can be considered as an opti-
mization process that finds the set of planes Π (t) forwhich the obtained profiles �(t) have the maximum sym-metry of the back. This process converges to the bestsymmetry line estimation under the following doublehypothesis:
1. the symmetry line passes through the most symmetricpoints of the back;
2. Π (t) produces profiles having the maximum symmetryof the back.
These hypotheses could not be verified in any real cases.However the presented method evaluates the geometrical fea-tures of the scanned back surface.
4 Experimentation and results
The NEPA has been implemented in an original software,coded in C++. The performances of the method have been
123
Int J Interact Des Manuf
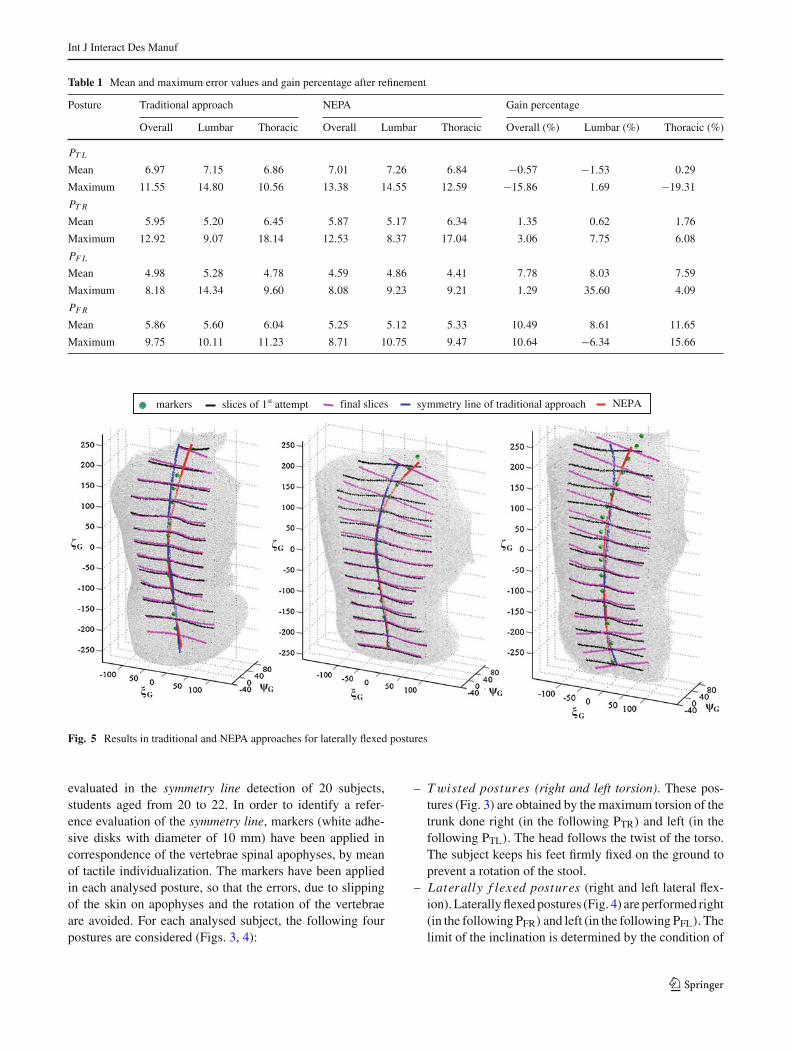
Table 1 Mean and maximum error values and gain percentage after refinement
Posture Traditional approach NEPA Gain percentage
Overall Lumbar Thoracic Overall Lumbar Thoracic Overall (%) Lumbar (%) Thoracic (%)
PT L
Mean 6.97 7.15 6.86 7.01 7.26 6.84 −0.57 −1.53 0.29
Maximum 11.55 14.80 10.56 13.38 14.55 12.59 −15.86 1.69 −19.31
PT R
Mean 5.95 5.20 6.45 5.87 5.17 6.34 1.35 0.62 1.76
Maximum 12.92 9.07 18.14 12.53 8.37 17.04 3.06 7.75 6.08
PF L
Mean 4.98 5.28 4.78 4.59 4.86 4.41 7.78 8.03 7.59
Maximum 8.18 14.34 9.60 8.08 9.23 9.21 1.29 35.60 4.09
PF R
Mean 5.86 5.60 6.04 5.25 5.12 5.33 10.49 8.61 11.65
Maximum 9.75 10.11 11.23 8.71 10.75 9.47 10.64 −6.34 15.66
Fig. 5 Results in traditional and NEPA approaches for laterally flexed postures
evaluated in the symmetry line detection of 20 subjects,students aged from 20 to 22. In order to identify a refer-ence evaluation of the symmetry line, markers (white adhe-sive disks with diameter of 10 mm) have been applied incorrespondence of the vertebrae spinal apophyses, by meanof tactile individualization. The markers have been appliedin each analysed posture, so that the errors, due to slippingof the skin on apophyses and the rotation of the vertebraeare avoided. For each analysed subject, the following fourpostures are considered (Figs. 3, 4):
– Twisted postures (right and left torsion). These pos-tures (Fig. 3) are obtained by the maximum torsion of thetrunk done right (in the following PTR) and left (in thefollowing PTL). The head follows the twist of the torso.The subject keeps his feet firmly fixed on the ground toprevent a rotation of the stool.
– Laterally f lexed postures (right and left lateral flex-ion). Laterally flexed postures (Fig. 4) are performed right(in the following PFR) and left (in the following PFL). Thelimit of the inclination is determined by the condition of
123

Int J Interact Des Manuf
detachment of the buttocks from sitting. The head followsthe movement without forcing the slope of the spine.
The vertebral column has been divided in two tracts:lumbar and thoracic. In each tract the errors have beenevaluated as distances between the estimated symmetry lineand the barycentre of the markers. In Table 1 the errorsobtained in the presented experimentation are reported. Byanalyzing the results is possible to highlight that in the caseof laterally flexed postures, NEPA improves the symmetryline detection estimation of about 8÷10 %. In Fig. 5 the tra-ditional approach for symmetry lines detection are comparedwith the proposed one in four cases of laterally flexed pos-tures. The improvement is due to the refinement process bychoosing of sectioning planes that better supports the backsymmetry. Instead, there is not significant difference in thecase of twisted postures in which the better slicing planes aresubstantially perpendicular to the quasi-longitudinal axis.
5 Conclusions
In this paper a new method for symmetry line detection innon-erected postures is presented. NEPA is based on an iter-ative process that, starting from a symmetry line of the firstattempt, step by step converges to the best estimation. Themethod is here validated analysing the twisted postures (left,right) and laterally flexed postures (left, right) of 20 sub-jects. In the analysed cases, it is observed that the methodconverges after not more than three refinement steps. NEPAis compared with the traditional approach to symmetry linedetection, having as a reference the cutaneous marking. Inparticular, for both analysed methods, the errors are mea-sured as the distances between the estimated symmetry lineand the barycentre of the markers. NEPA satisfactorily per-forms estimation of the symmetry line furnishing the capa-bility to analyse non-erected postures. Furthermore, it shows
promising characteristics to analyse subject’s backs affectedby deforming pathologies of the spine and it is also suited toanalyse athletic gestures which involve torsion-flexion of thetorso. As it was expectable, the method is strongly affected bythe body morphology of the subject: gibbosities or other alter-ations can generate false symmetries that affect the symme-try line detection process. In addition, the refinement processhere proposed needs a good initial estimation of the symmetryline to converge to a good estimation.
References
1. Keller, T.S., Colloca, C.J., Harrison, D.E., Harrison, D.D., Tadeusz,T.J.: Influence of spine morphology on intervertebral disc loads andstresses in asymptomatic adults: implications for the ideal spine.Spine J. 5, 297–309 (2005)
2. Kothiyal, K., Kayis, B.: Workplace layout for seated manual han-dling tasks: an electromyography study. Int. J. Indus. Ergonomics27, 19–32 (2001)
3. Huysmans, T., Haex, B., De Wilde, T., Van Audekercke, R., Van derPerre, G.: A 3D active shape model for the evaluation of the align-ment of the spine during sleeping. Gait Posture 24, 54–61 (2006)
4. Drerup, B., Hierholzer, E.: Back shape measurement using videorasterstereography and three-dimensional reconstruction of spinalshape. Clin. Biomech. 9(1), 28–36 (1994)
5. Turner-Smith, A.R.: A method for analysis of back shape in scolio-sis. In J. Biomech. 21(6), 497–509 (1988)
6. Pazos, V., Cheriet, F., Song, L., Labelle, H., Dansereau, J.: Accu-racy assessment of human trunk surface 3D reconstructions froman optical digitising system. Med. Biol. Eng. Comput. 43(1), 11–15(2005)
7. Bergeron, C., Cheriet, F., Ronsky, J., Zernicke, R., Labelle, H.: Pre-diction of anterior scoliotic spinal curve from trunk surface usingsupport vector regression. Eng. Appl. Artif. Intell. 18, 973–983(2005)
8. Santiesteban, Y., Sanchez, J.M., Sotoca, J.M.: A method for detec-tion and modelling of the human spine based on principal curvature.CIARP 2006, 168–177 (2006)
9. Di Angelo, L., Di Stefano, P., Vinciguerra, M.G.: Experimental vali-dation of a new method for symmetry line detection. Comput. AidedDes. Appl. 8(1), 71–86 (2011)
123