Embed Size (px)
Citation preview

Swimming Research and Education at the
Centre for Aquatics Researchand Education (CARE)
The University of Edinburgh
Ross Sanders Hideki Takagi

The FacilityThe Facility
Fully automatic control of camera functions
6 Lane 25m pool
6 underwater cameras, 3 above water
Floor to any depth at one end
Software controlled video data collection and feedback
Digital video data storage – analysis, web display etc.




Research and Education Activities
Learn to swim research (SNL)
Swimmer analysis and feedback• Coach and swimmer services• Coach and swimmer workshops/seminars• Stroke camps
Web activities• Coaches’ Information Service
• Educational CPD modules
Video and CD ROM production activities
International collaboration

RoozbehNaemiTurns
Stelios PsycharakisIntracyclic Velocity
ShupingLi
Hydrotherapy
Morteza ShahbaziActive and
PassiveDrag
Chris Connaboy
UnderwaterKicking
Research Projects
Ross Sanders3D Kinetic and
Kinematics Mid Pool

Models Underlying Our Research PlanModels Underlying Our Research Plan
1. Analysis of Mid-Pool Swimming1. Analysis of Mid-Pool Swimming • New model for analysing mid pool swimming • Differs from the traditional stroke-length/stroke
frequency approach
• Forces and torques are difficult to measure
• Stroke-length/stroke-frequency analysis is limited wrt developing strategies for improving performance of individual swimmers
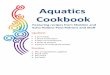
• New model is based on biomechanical principles behavioral goals critical features

Global Goals
Primary MechanicalPrinciple
PrimaryBehaviouralGoals
Secondary BehaviouralGoals
SecondaryMechanicalPrinciple
CriticalFeatures
Minimiseresistive impulse
Maximisepropulsive impulse
Restrainphysiological cost
Maximise the magnitudeof propulsive forces
Maximise the timeof propulsive forces
The change in motion dependson the magnitude of the net force
and the time over which it acts
Commence catch soon after entry
Release as late as possible
Recover the hand quickly
Resistance to rotation dependson mass distribution
with respect to the axis
Time catchto release
Time catchwrt entry
Time release to entry
Distance hand to shoulder during recovery

Measurement of Hand Forces Using Pressure Transducers

Global Goals
Primary MechanicalPrinciple
PrimaryBehaviouralGoals
Secondary BehaviouralGoals
SecondaryMechanicalPrinciple
CriticalFeatures
Minimiseresistive impulse
Maximisepropulsive impulse
Restrainphysiological cost
Minimise the magnitudeof resistive forces
Minimise the timeof resistive forces
The change in motion dependson the magnitude of the net force
and the time over which it acts
Maximise the timeof propulsive part of pull
Commence catchsoon after entry
Recover the hand quickly
Resistance to rotation dependson mass distribution
with respect to the axis
Time catchto release
Time catchwrt entry
Time release to entry
Distance hand to shoulder during recovery

Global Goals
Primary MechanicalPrinciple
PrimaryBehaviouralGoals
Secondary BehaviouralGoals
CriticalFeatures
Minimiseresistive impulse
Maximisepropulsive impulse
Restrainphysiological cost
Maximise the magnitudeof propulsive forces
Maximise the timeof propulsive forces
The change in motion dependson the magnitude of the net force
and the time over which it acts
Maximise X-sect. area of
propelling limbs to flow
Maximise speed of
propelling limbs
Optimise alignment of
propelling limbs
Elbow position/internal rotation
Hand orientation
Optimise direction of propelling
limbs
Foot orientation
Magnitude body roll
Timing body roll
Hip, knee, ankle
angles
Hand, arm speed
Hand,arm path
Amplitude,frequency
of kick

Timing,magnitude body roll
Minimise the timeof resistive forces
Global Goals
Primary MechanicalPrinciple
PrimaryBehaviouralGoals
Secondary BehaviouralGoals
CriticalFeatures
Minimiseresistive impulse
Maximisepropulsive impulse
Restrainphysiological cost
Minimise the magnitudeof resistive forces
The change in motion dependson the magnitude of the net force
and the time over which it acts
Minimise X-sect. area of
body segments to flow
Minimise speed of body
segments in direction of
travel
Optimise alignment
Hand and arm orientation -
entry, entry to catch, release to
exit
Optimise shape
Head, trunk, thigh, shank, foot angles
SecondaryMechanicalPrinciple
The counter-rotation effect dependson mass distribution with respect to
the axis and angular velocity
Hand and arm speed -
entry, entry to catch, release
to exit Width arm recovery,
head lifting
Body alignment
Amplitude, frequency kicking

Distance from wall in turn
Time contact
Rate of rotation
Body postures adopted: angles of segments to flow
and joint angles
Time in Time out
Body alignment wrt direction of
travel
Average Speed
Initial swim Speed
Distance during tumble
TimingResistive forces
Time from - 5 to 15 m
Time of tumble
Distance at start of
tumble
Speed during tumble

Time Extension
Time in
Resistive impulse
Ecc. joint torques hip, knee, ankle
Time contact Time out
Swim Speed
Initial joint angles, hip,
knee, ankle
Conc. joint torques hip, knee, ankle,
shoulder
Final joint angles, hip,
knee, ankle
Time Flexion
Speed at first contact
Distance Distance Speed at last contact
Speed during tumble
Joint angles, hip, knee, ankle
Impulse Joint angles, hip, knee, ankle
Time from - 5 to 15 m

Time contact Time in
Distance from wall at last contact
Kick amplitude
Distance
Speed at last contact
Time from - 5 to 15 m
Time out
Average Speed
Body alignment
Body posture
Speed
Kick frequency
Depth
Timing of initiating kick
Resistive impulse
Propulsive
impulse
Speed during glide
Speed during kick

Timing of the Kick in Turns and StartsTiming of the Kick in Turns and Starts
• Speed following turn or after entry is > speed from kicking (Lyttle & Blanksby; 2000)
• Timing of the kick is important
• Need to find a method of determining when to start kicking

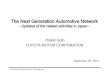
Model the velocity that would occur in the absence of kicking
• Fit an exponential decay function
v(i) = ae-kt(i)
Mathematical ModelMathematical Model

0
0.5
1
1.5
2
2.5
0 0.5 1 1.5 2
Time (s)
Velo
city
(m/s
)
Actual VelocityFitted Velocity

0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2Time (s)
Dis
tan
ce (m
)
Actual Distance
Fitted Distance

Research inLearn to Swim
A Strategic Partnership
between Swimming Nature
Limited andThe University of
Edinburgh

The Research GoalThe Research Goal
To increase effectiveness of teaching swimming

The Research TeamThe Research Team
Ross Sanders, Eduardo FerreKelly Myers
SNL‘Think Tank’ SNL
Teachers
U of EStaff
P/gradsU/grads

Building water
confidence
Developingsafety sense
Developingfeel
for the water
Developinggood
techniqueCreatingfun
Maximisinglearning
rate
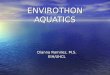
TeachingEffectiveness

Learner characteristic
s
Drills and activities
usedSequencing of drills and
activities
Teacher characteristics
Teacher to student
ratio
Environment
Variables affecting
effectiveness

Conclusion
Described the facility, personnel, and some of the research and educational activities at CARE.
Presented models that guide the sports biomechanics research and service activities.
Indicated some of the ways the research is contributing to improved coaching and teaching.