Embed Size (px)
Citation preview
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 1/221ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm Intelligence in Robotics
Dr. Alaa Khamis
Pattern Analysis and Machine Intelligence
University of Waterloo
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 2/222ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 3/223ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 4/224ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
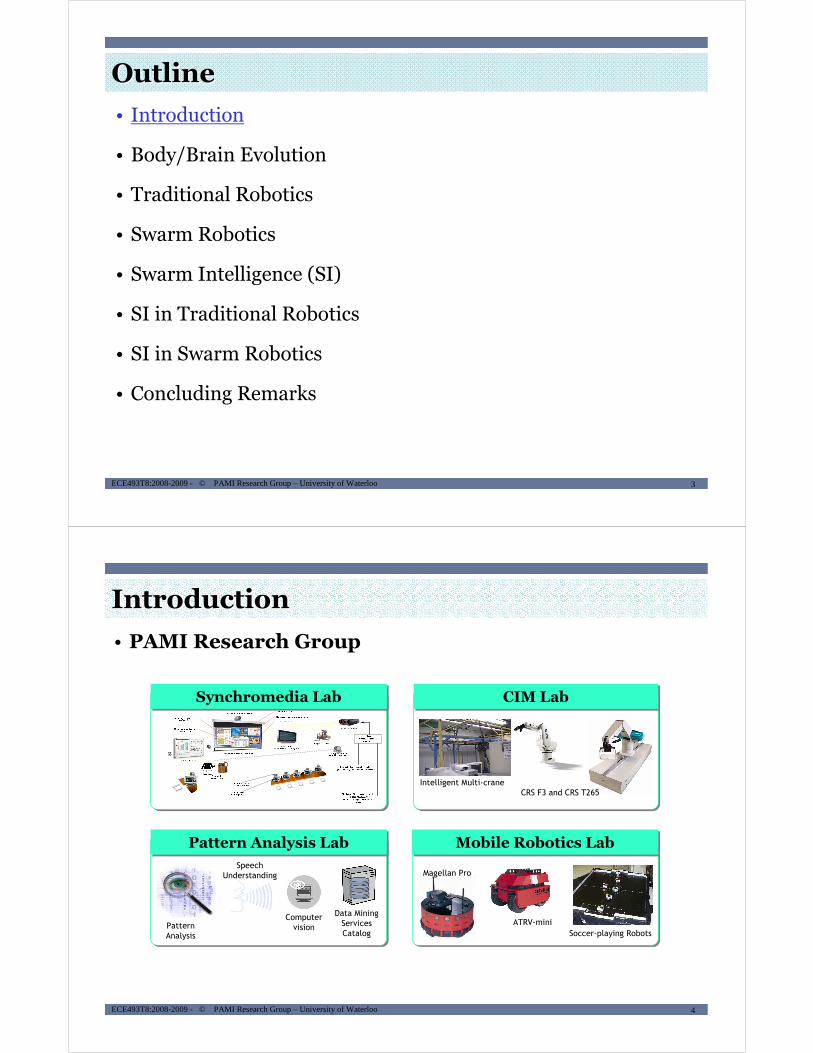
IntroductionIntroduction
Synchromedia LabSynchromedia Lab
• PAMI Research Group
Mobile Robotics LabMobile Robotics Lab
ATRV-mini
Magellan Pro
Soccer-playing Robots
CIM LabCIM Lab
Intelligent Multi-crane
CRS F3 and CRS T265
Pattern Analysis LabPattern Analysis Lab
Data Mining
Services
Catalog
Computer
visionPattern
Analysis
Speech
Understanding
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 5/225ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
IntroductionIntroduction
• Swarm Intelligence in Robotics
The objective of this talk is to highlight the different applications
of the rapidly emerging field of swarm intelligence in solving
complex problems of traditional and swarm robotics.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 6/226ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 7/227ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
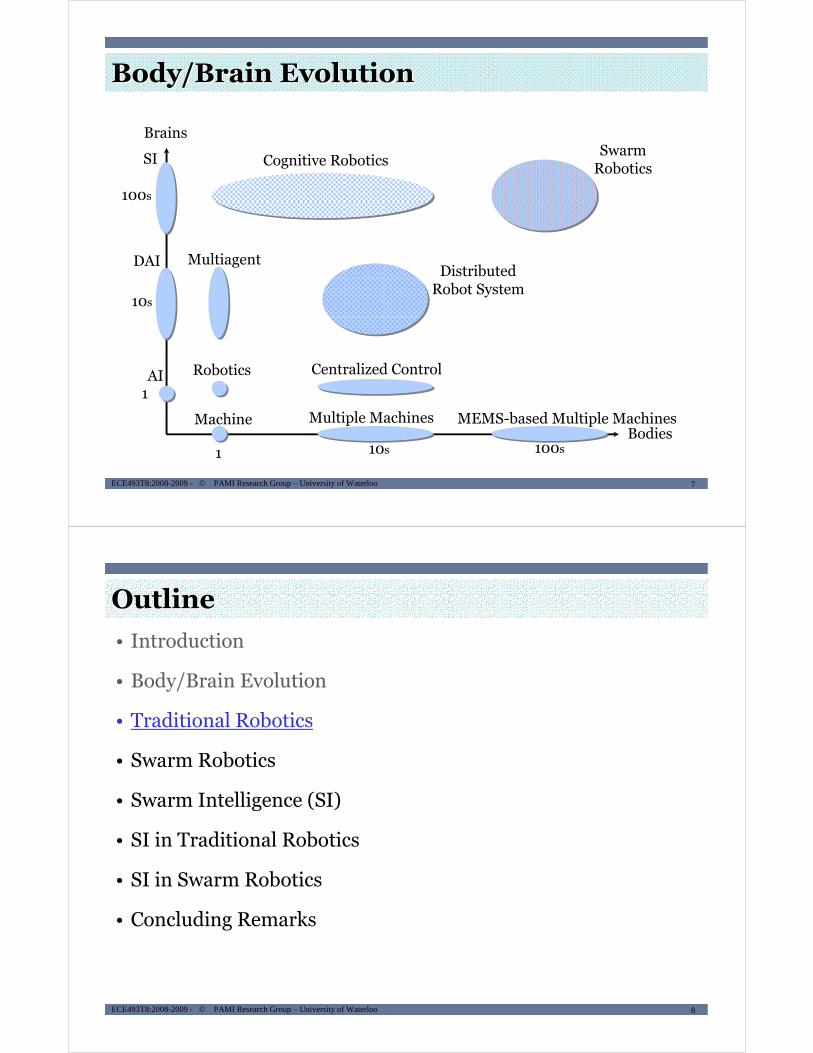
Body/Brain EvolutionBody/Brain Evolution
Brains
Bodies
100s
SI
10s
DAI
1AI Robotics Centralized Control
10s
Multiple Machines
1
Machine
Cognitive Robotics
MultiagentDistributed Robot System
SwarmRobotics
100s
MEMS-based Multiple Machines
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 8/228ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 9/229ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
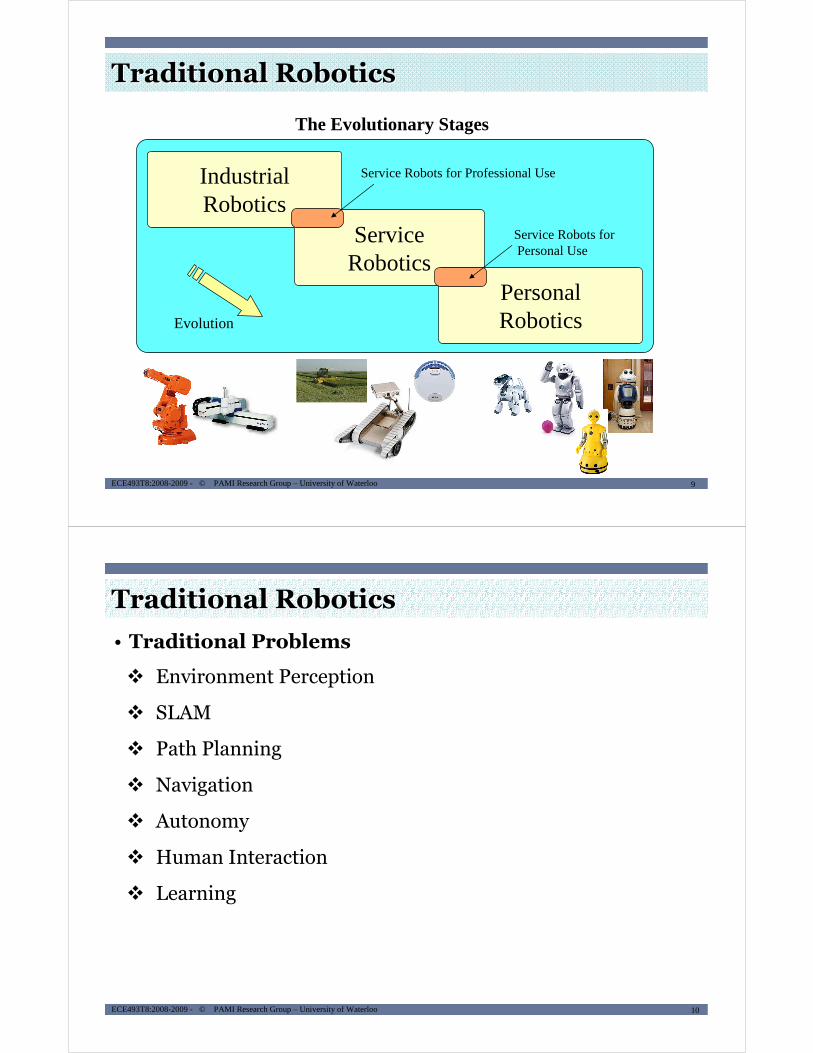
Traditional RoboticsTraditional Robotics
The Evolutionary Stages
IndustrialRobotics
ServiceRobotics
PersonalRobotics
Service Robots for Professional Use
Service Robots forPersonal Use
Evolution
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 10/2210ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Traditional RoboticsTraditional Robotics
• Traditional Problems
� Environment Perception
� SLAM
� Path Planning
� Navigation
� Autonomy
� Human Interaction
� Learning
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 11/2211ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 12/2212ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
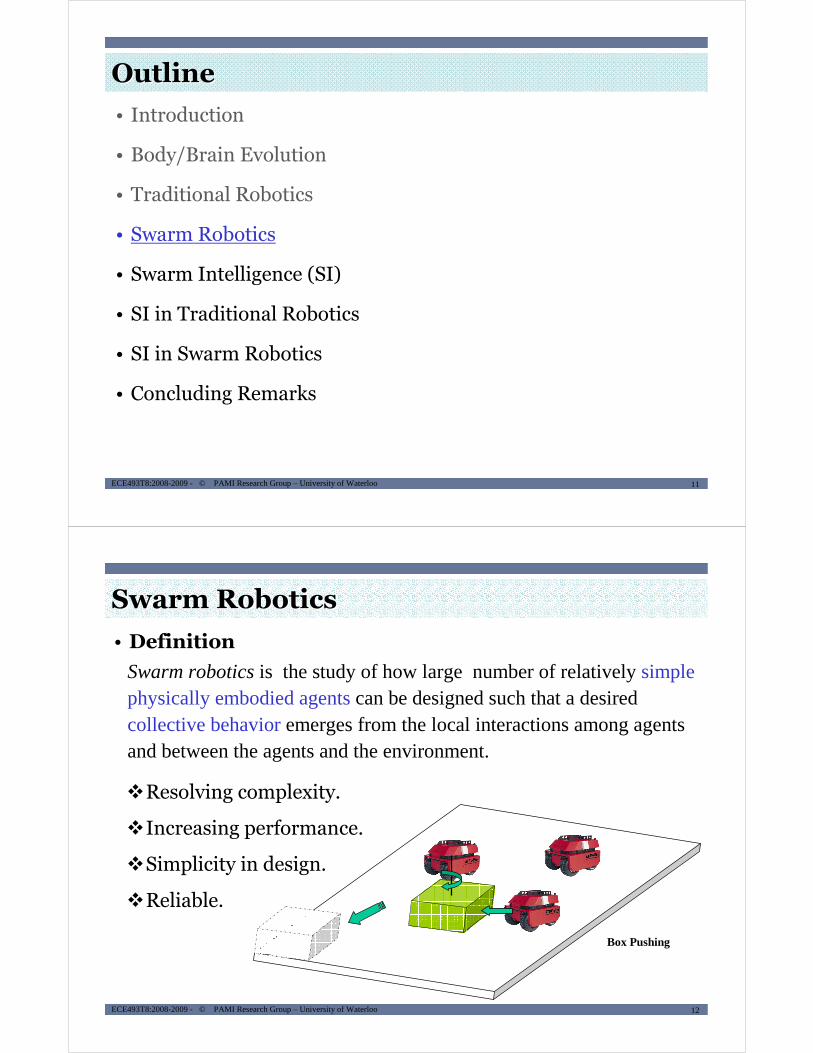
Swarm RoboticsSwarm Robotics
• Definition
Swarm robotics is the study of how large number of relatively simple physically embodied agentscan be designed such that a desired collective behavioremerges from the local interactions among agents and between the agents and the environment.
Box Pushing
�Resolving complexity.
�Increasing performance.
�Simplicity in design.
�Reliable.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 13/2213ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
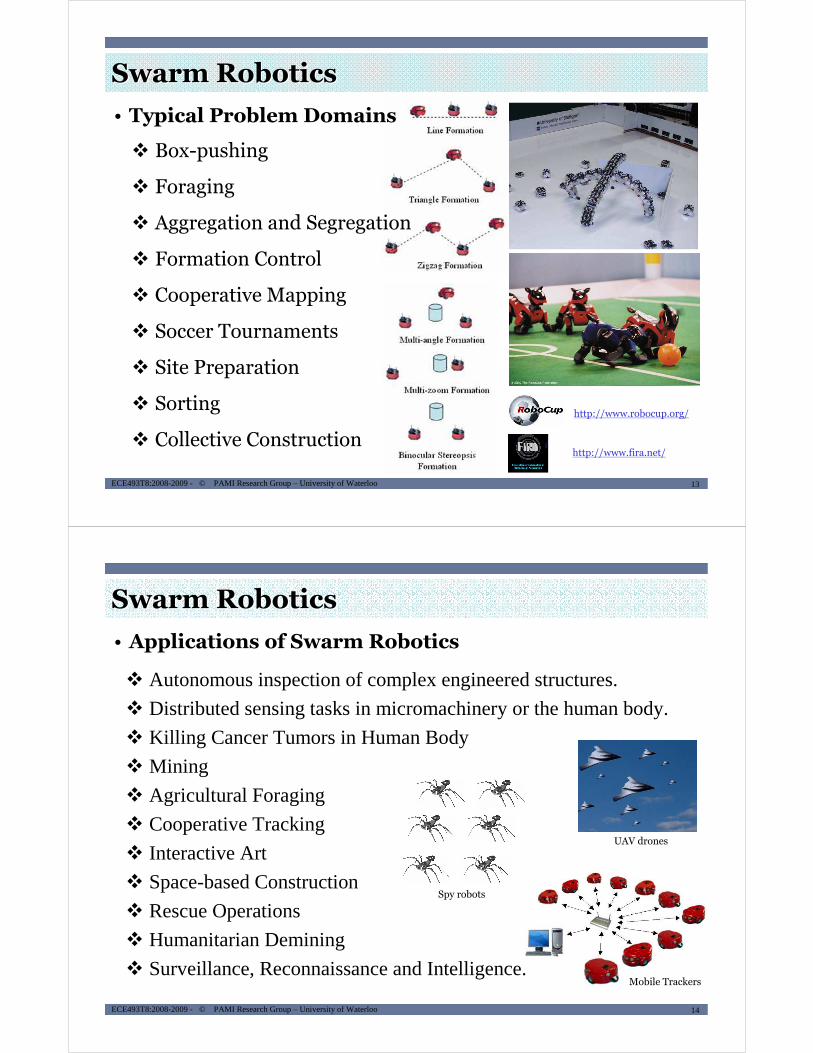
Swarm RoboticsSwarm Robotics
• Typical Problem Domains
� Box-pushing
� Foraging
� Aggregation and Segregation
� Formation Control
� Cooperative Mapping
� Soccer Tournaments
� Site Preparation
� Sorting
� Collective Construction
http://www.robocup.org/
http://www.fira.net/
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 14/2214ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
� Autonomous inspection of complex engineered structures.
� Distributed sensing tasks in micromachinery or the human body.
� Killing Cancer Tumors in Human Body
� Mining
� Agricultural Foraging
� Cooperative Tracking
� Interactive Art
� Space-based Construction
� Rescue Operations
� Humanitarian Demining
� Surveillance, Reconnaissance and Intelligence.
• Applications of Swarm Robotics
UAV drones
Mobile Trackers
Spy robots

MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 15/2215ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
Swarm-bots, Marco Dorigo, 2005
http://www.swarm-bots.org/• Projects
The SWARM-BOT project aims to study a novel swarm robotics system.
� It is directly inspired by the collective behaviorof social insects and other animal societies.
� It focuses on self-organizationand self-assemblingof autonomous agents.
� Its main scientific challenge lays in the development of a novel hardware and of innovative controlsolutions.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 16/2216ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
PAMI Lab
Leaderless Distributed (LD) Flocking AlgorithmFlocking in Embedded Robotic Systems
CORO - Caltech
• Projectshttp://horizon.uwaterloo.ca/multirobot/
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 17/2217ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
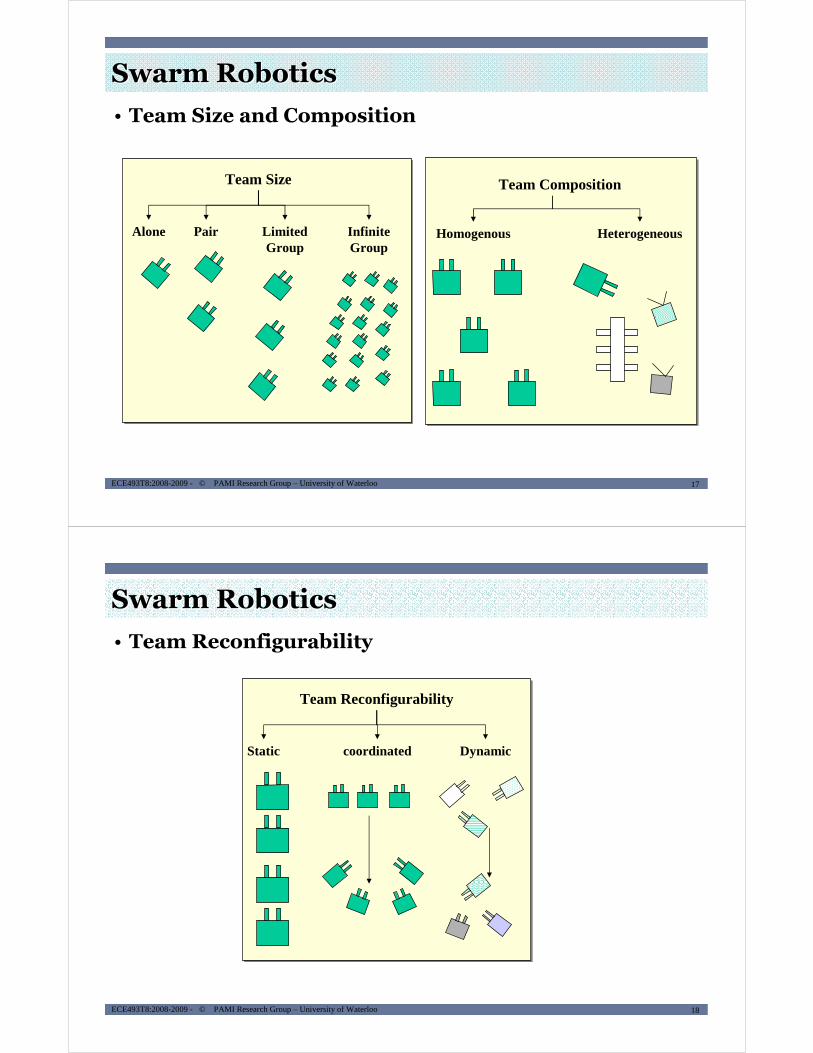
Swarm RoboticsSwarm Robotics
Team Size
Alone Pair LimitedGroup
InfiniteGroup
• Team Size and Composition
Team Composition
Homogenous Heterogeneous
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 18/2218ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
Team Reconfigurability
Static coordinated Dynamic
• Team Reconfigurability
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 19/2219ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
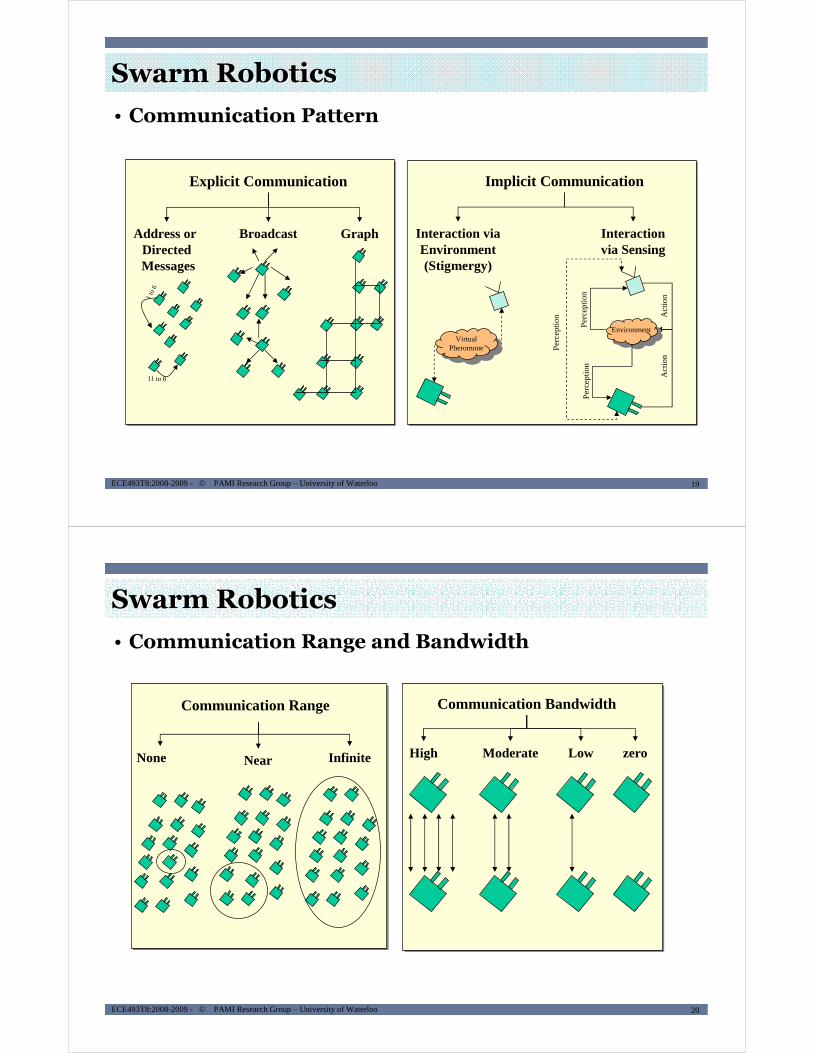
Swarm RoboticsSwarm Robotics
• Communication Pattern
Explicit Communication
Address or DirectedMessages
Broadcast Graph
1 to
6
11 to 8
Implicit Communication
Interaction via Environment (Stigmergy)
Interaction via Sensing
Act
ion
Pe
rce
ptio
n
Act
ion
Pe
rce
ptio
n
EnvironmentVirtual
Pheromone Pe
rce
ptio
n
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 20/2220ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
Communication Range
None Near Infinite
• Communication Range and Bandwidth
Communication Bandwidth
High Moderate zeroLow
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 21/2221ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
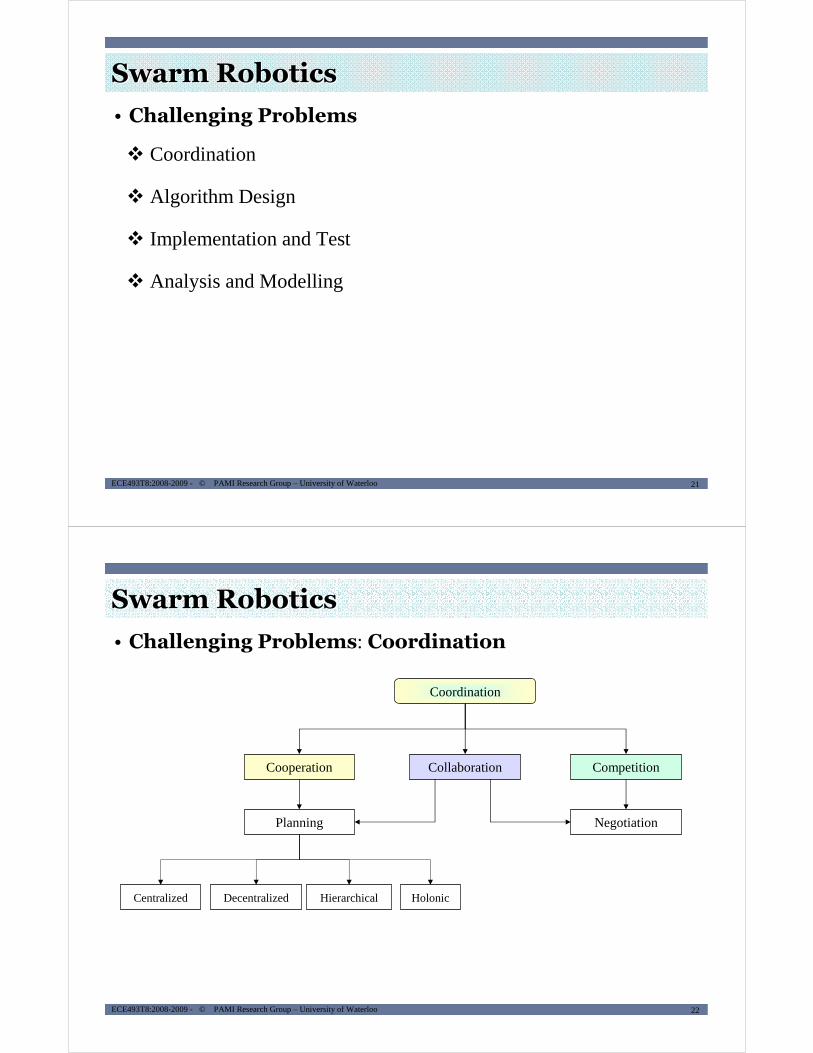
Swarm RoboticsSwarm Robotics
• Challenging Problems
� Coordination
� Algorithm Design
� Implementation and Test
� Analysis and Modelling
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 22/2222ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
Cooperation Collaboration Competition
Planning Negotiation
Coordination
Centralized Decentralized Hierarchical Holonic
• Challenging Problems: Coordination
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 23/2223ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
Swarm roboticists face the problem of designing both the
physical morphology and behaviours of the individual robots
such that when those robots interact with each other and their
environment, the desired overall collective behaviours will
emerge. At present there are no principled approaches to the
design of low-level behaviours for a given desired collective
behaviour [1].
• Challenging Problems: Algorithm Design
“collective behavior is not simply the sum of each participant’s
behavior, as others emerge at the society level” [2].
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 24/2224ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
To build and rigorously test a swarm of robots in the laboratory
requires a considerable experimental infrastructure. Real-robot
experiments thus typically proceed hand-in-hand with
simulation and good tools are essential [1].
• Challenging Problems: Implementation and Test

MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 25/2225ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
• Challenging Problems: Implementation and Test
�Advanced Robotics Interface for Applications (ARIA):
Robotic Sensing and Control Libraries.
�Open Robot Control Software (OROCOS): open-source
real time control architecture for different machines.
�Player/Stage/Gazebo: PSG is open source software that used
and developed by an international community of researchers
from over 30 universities/companies.
�Microsoft Robotics Studio: is a Windows-based
environment for robot control and simulation.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 26/2226ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Stage 3.0 [3]
2,000 minibots 100 Pioneer Robots
Swarm RoboticsSwarm Robotics
• Challenging Problems: Implementation and Test
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 27/2227ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm RoboticsSwarm Robotics
A robotic swarm is typically a stochastic, non-linear system and
constructing mathematical models for both validation and
parameter optimization is challenging. Such models would
surely be an essential part of constructing a safety argument for
real-world applications [1].
• Challenging Problems: Analysis and Modelling
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 28/2228ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 29/2229ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm IntelligenceSwarm Intelligence
Brain Neural Networks
Evolution Genetic Algorithms
Immune System Protection of computers and networks
Social Insects Swarm Intelligence
DNA Cellular Automata
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 30/2230ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
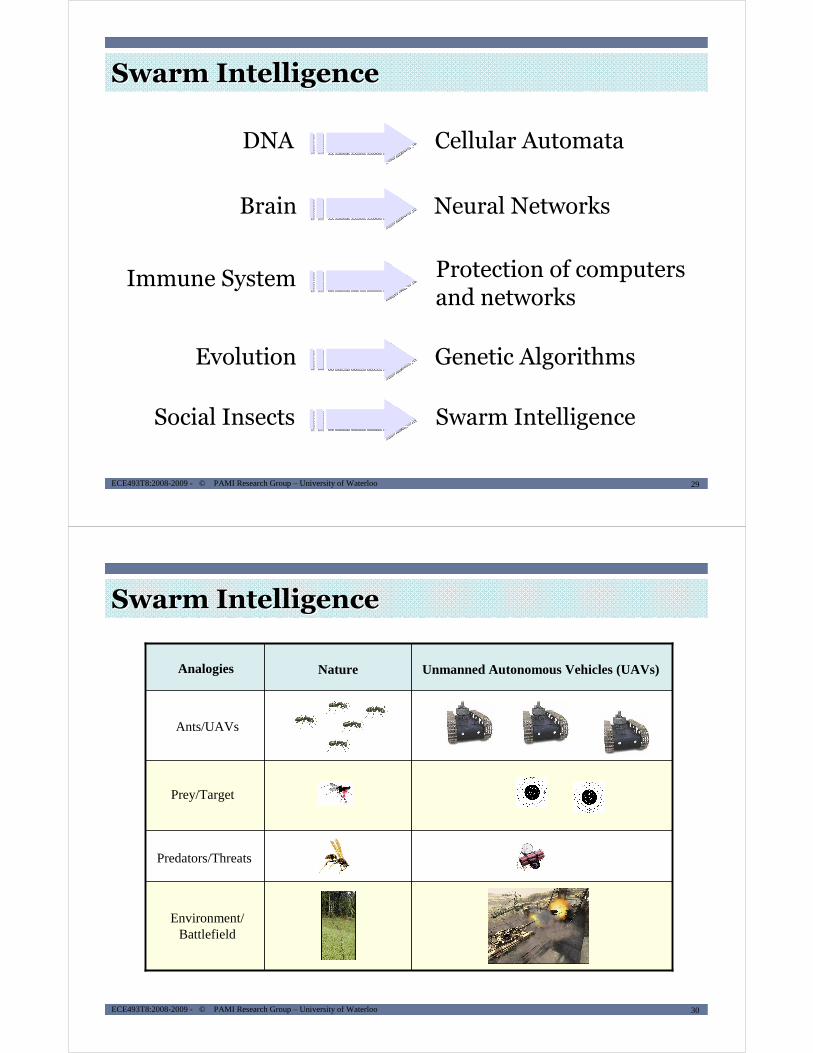
Nature Unmanned Autonomous Vehicles (UAVs)
Predators/Threats
Ants/UAVs
Environment/Battlefield
Prey/Target
Analogies
Swarm IntelligenceSwarm Intelligence
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 31/2231ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm IntelligenceSwarm Intelligence
• Definition
Swarm intelligence (SI) refers to the phenomenon of a system of
spatially distributed individuals coordinating their actions in a
decentralized and self-organized manner so as to exhibit
complex collective behavior.
“SI is the property of a system whereby the
collective behaviors of (unsophisticated)
agents interacting locally with their
environment cause coherent functional global
patterns to emerge.”
Swarm intelligence solves optimization problems.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 32/2232ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm IntelligenceSwarm Intelligence
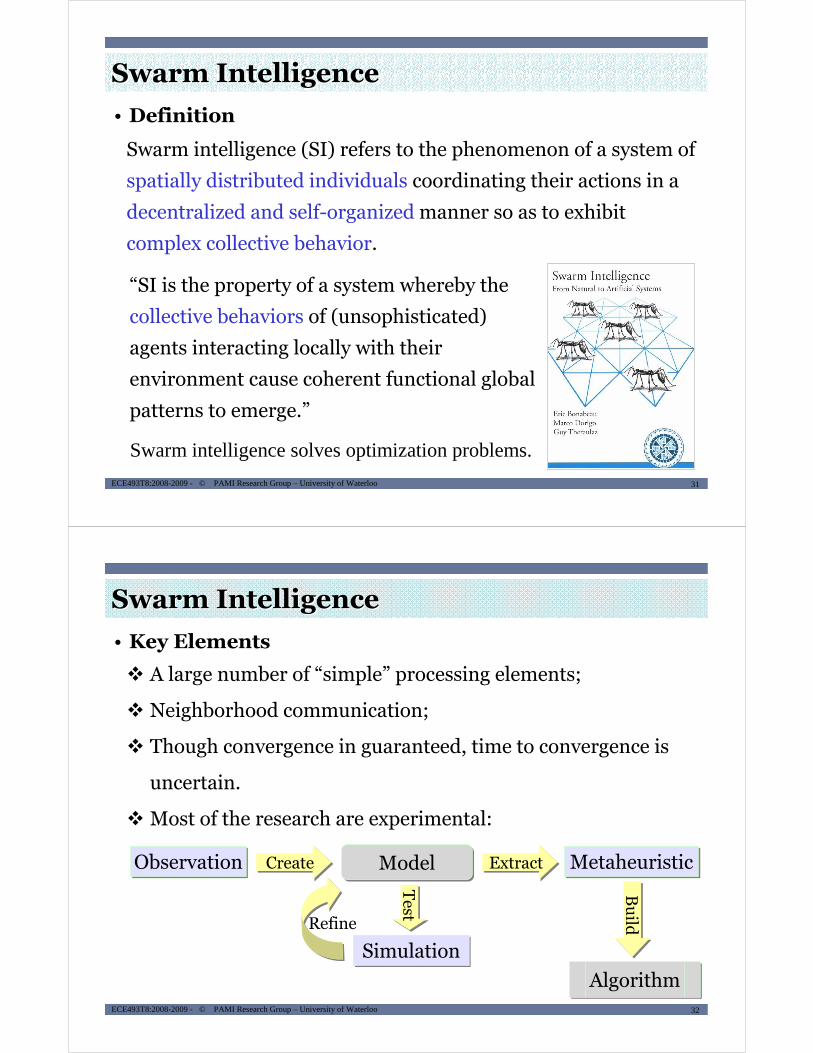
• Key Elements
� A large number of “simple” processing elements;
� Neighborhood communication;
� Though convergence in guaranteed, time to convergence is
uncertain.
�Most of the research are experimental:
ModelModelObservationObservation CreateCreate MetaheuristicMetaheuristic
AlgorithmAlgorithm
Build
Build
SimulationSimulation
TestTest
Refine
ExtractExtract
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 33/2233ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm IntelligenceSwarm Intelligence
Initialize parameters
Initialize population
While (end condition not satisfied ) loop over all individuals
Find best so far
Find best neighbor
Update individual
Initialize parameters
Initialize population
While (end condition not satisfied ) loop over all individuals
Find best so far
Find best neighbor
Update individual
• SI-based Approaches
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 34/2234ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Swarm IntelligenceSwarm Intelligence
• SI-based Approaches
� Ant Colony Optimization (ACO)
� Particle Swarm Optimization (PSO)
� Stochastic Diffusion Search (SDS)
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 35/2235ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 36/2236ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
• ACO-based Motion Planning [4]
• PSO-based Motion Planning [5]
• Wall-following autonomous robot (WFAR) navigation [6]
• Gait Optimization [7]
• Kinematics and Dynamics of Robot Manipulators [8,9]
• Learning [10]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 37/2237ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
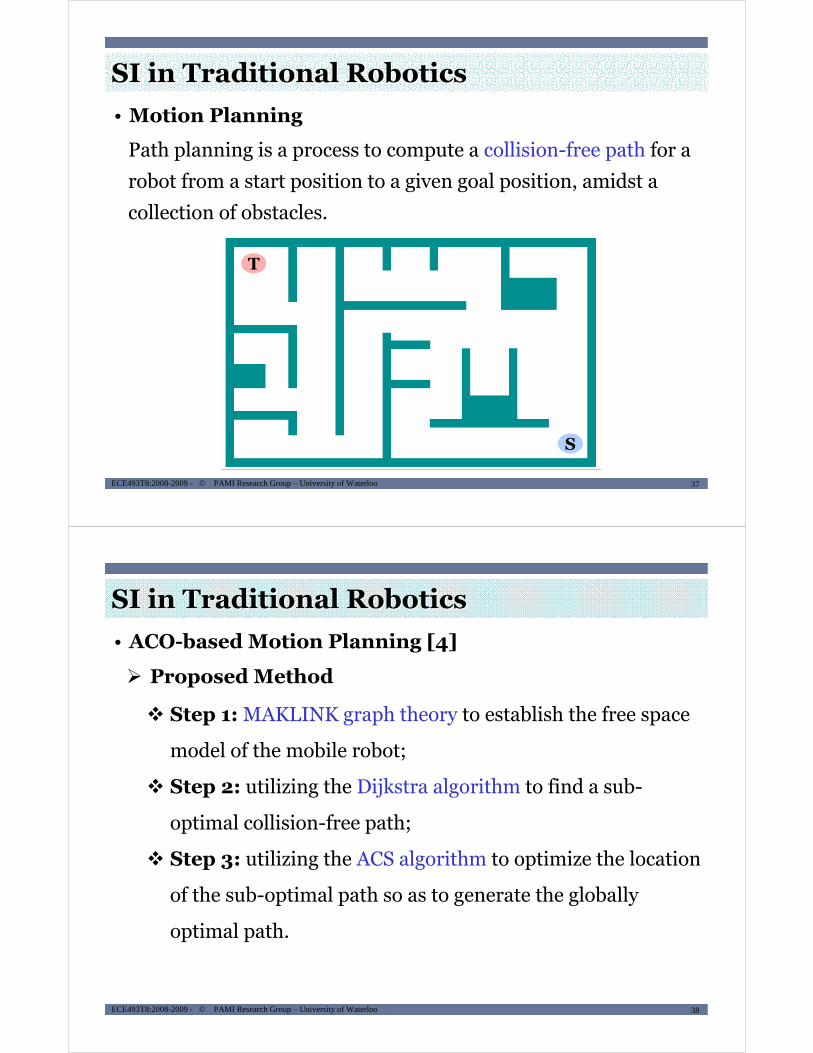
• Motion Planning
Path planning is a process to compute a collision-free path for a
robot from a start position to a given goal position, amidst a
collection of obstacles.
S
T
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 38/2238ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
• ACO-based Motion Planning [4]
� Proposed Method
� Step 1:MAKLINK graph theory to establish the free space
model of the mobile robot;
� Step 2: utilizing the Dijkstra algorithm to find a sub-
optimal collision-free path;
� Step 3: utilizing the ACS algorithm to optimize the location
of the sub-optimal path so as to generate the globally
optimal path.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 39/2239ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
1. The heights of the environment and obstacles can be
ignored;
2. There exist some known obstacles distributed in the
environment, both the environment and the obstacles have
a polygonal shape;
3. In order to avoid a moving path too close to the obstacles,
the boundaries of every obstacle can be expanded.
� Step 1: MAKLINK-based Free Space Model
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 40/2240ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
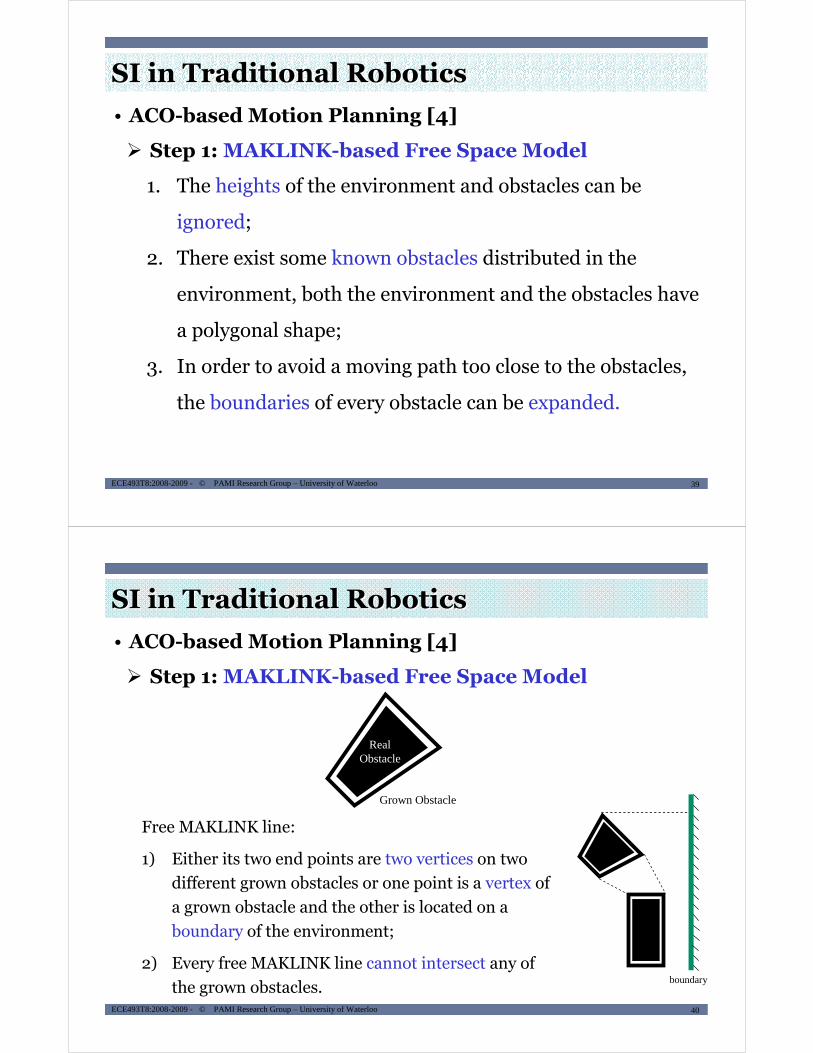
Free MAKLINK line:
1) Either its two end points are two vertices on two
different grown obstacles or one point is a vertex of
a grown obstacle and the other is located on a
boundary of the environment;
2) Every free MAKLINK line cannot intersect any of
the grown obstacles.
RealObstacle
Grown Obstacle
boundary
� Step 1: MAKLINK-based Free Space Model
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 41/2241ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
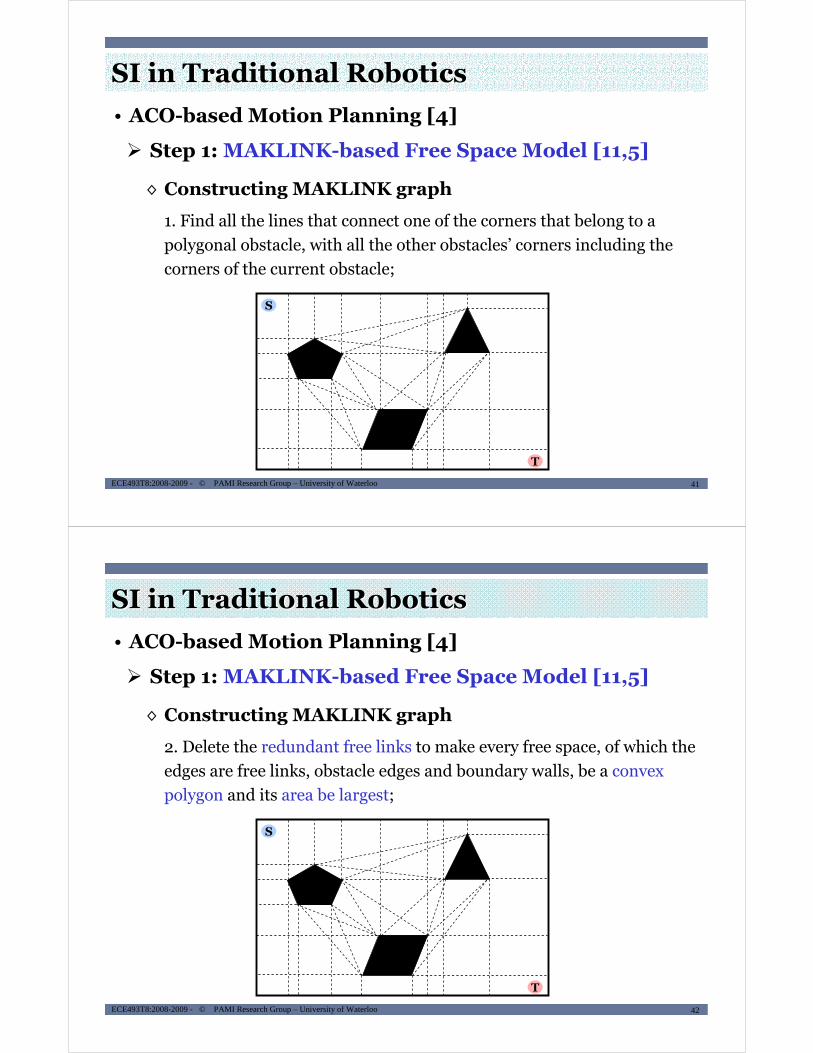
� Step 1: MAKLINK-based Free Space Model [11,5]
1. Find all the lines that connect one of the corners that belong to a
polygonal obstacle, with all the other obstacles’ corners including the
corners of the current obstacle;
◊ Constructing MAKLINK graph
S
T
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 42/2242ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 1: MAKLINK-based Free Space Model [11,5]
2. Delete the redundant free links to make every free space, of which the
edges are free links, obstacle edges and boundary walls, be a convex
polygon and its area be largest;
◊ Constructing MAKLINK graph
S
T
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 43/2243ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
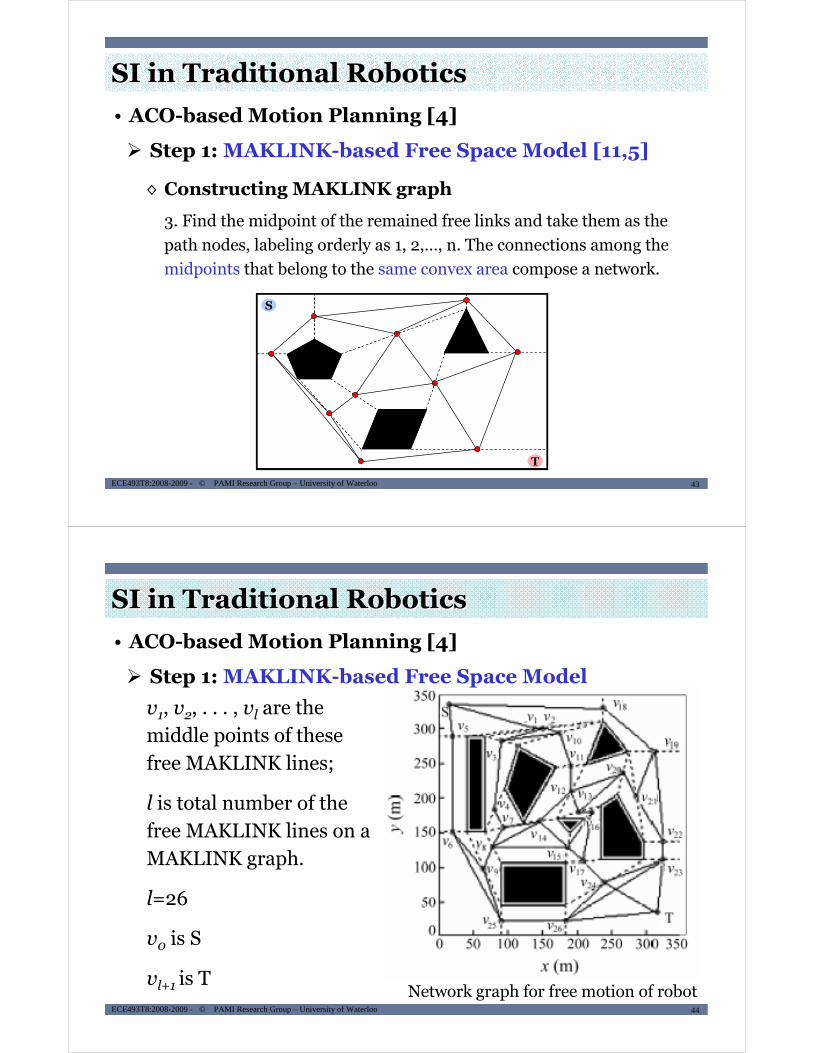
� Step 1: MAKLINK-based Free Space Model [11,5]
3. Find the midpoint of the remained free links and take them as the
path nodes, labeling orderly as 1, 2,…, n. The connections among the
midpoints that belong to the same convex area compose a network.
◊ Constructing MAKLINK graph
S
T
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 44/2244ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
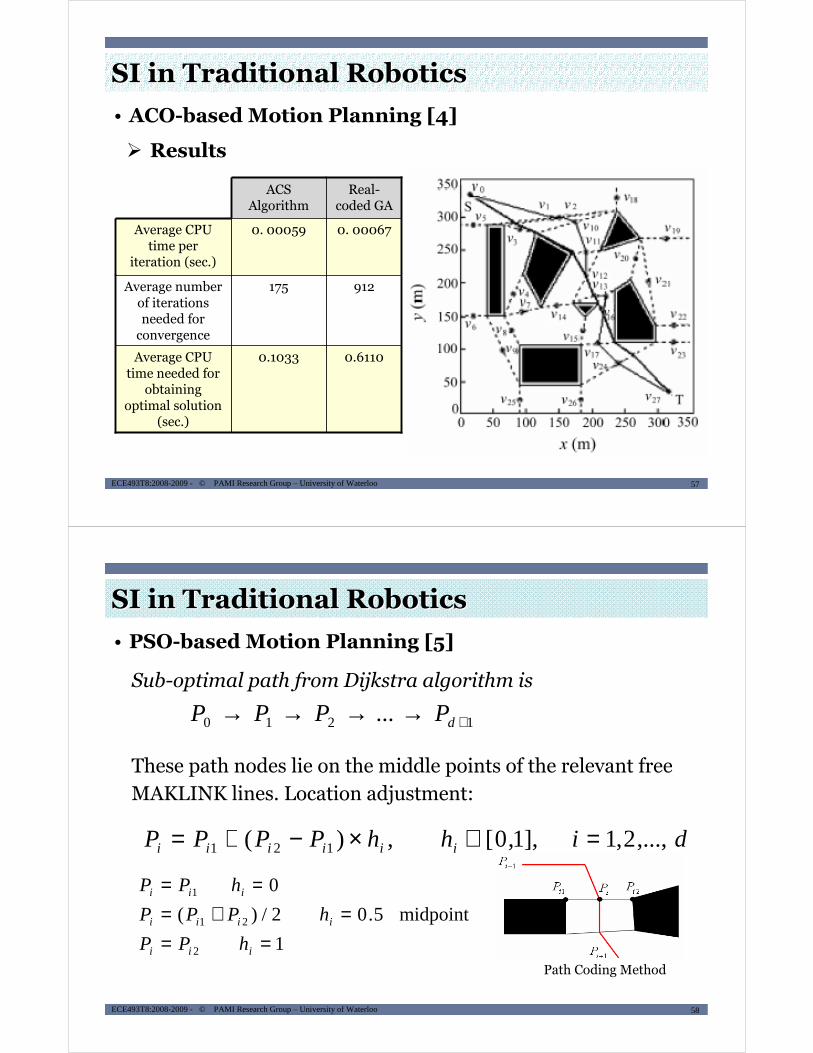
SI in Traditional RoboticsSI in Traditional Robotics
� Step 1: MAKLINK-based Free Space Model
v1, v2, . . . , vl are the
middle points of these
free MAKLINK lines;
l is total number of the
free MAKLINK lines on a
MAKLINK graph.
l=26
v0 is S
vl+1 is T Network graph for free motion of robot
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 45/2245ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
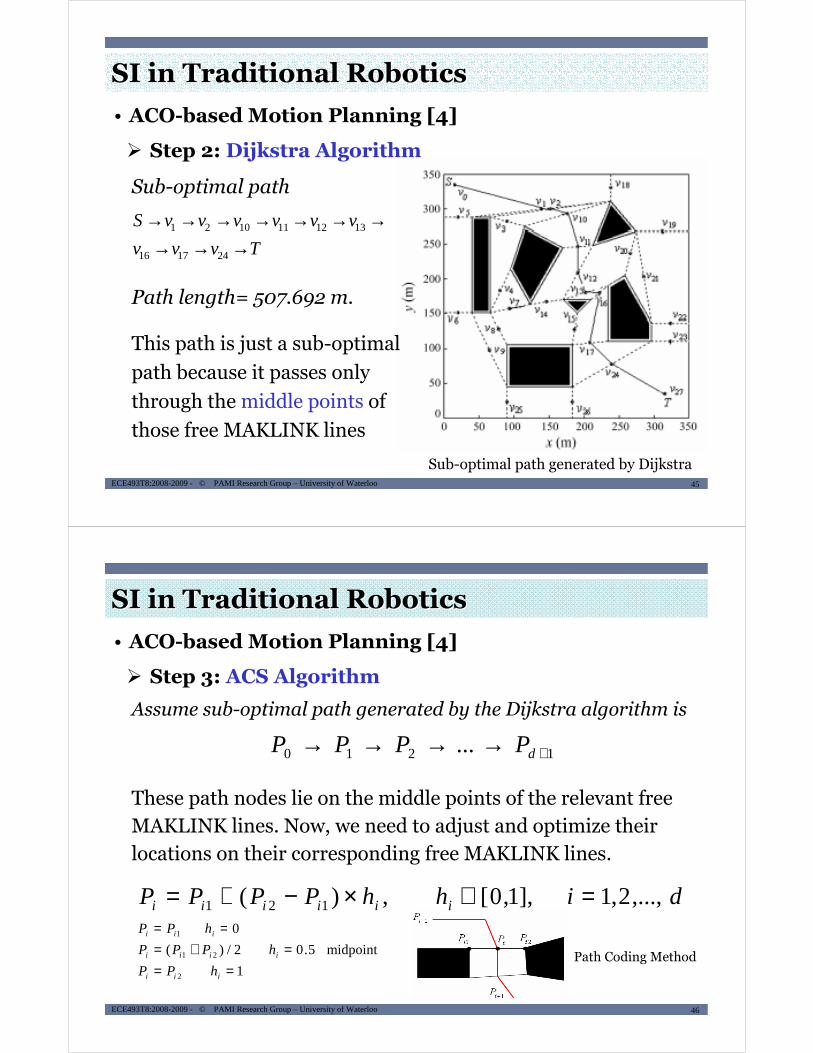
� Step 2: Dijkstra Algorithm
Sub-optimal path generated by Dijkstra
Path length= 507.692 m.
Tvvv
vvvvvvS
→→→→→→→→→→
241716
1312111021
Sub-optimal path
This path is just a sub-optimal
path because it passes only
through the middle points of
those free MAKLINK lines
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 46/2246ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
1210 ... +→→→→ dPPPP
Assume sub-optimal path generated by the Dijkstra algorithm is
These path nodes lie on the middle points of the relevant free
MAKLINK lines. Now, we need to adjust and optimize their
locations on their corresponding free MAKLINK lines.
dihhPPPP iiiiii ,...,2,1 ],1,0[ ,)( 121 =∈×−+=
Path Coding Method 1
midpoint 5.0 2/)(
0
2
21
1
===+=
==
iii
iiii
iii
hPP
hPPP
hPP
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 47/2247ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
)}(),({ 110
++=∑= ii
d
iii hPhPlengthL
The objective function of the optimization problem will be:
ACS algorithm is used to find the optimal parameter set
such that L has the minimum value.
},...,,{ *2
*1
*dhhh
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 48/2248ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
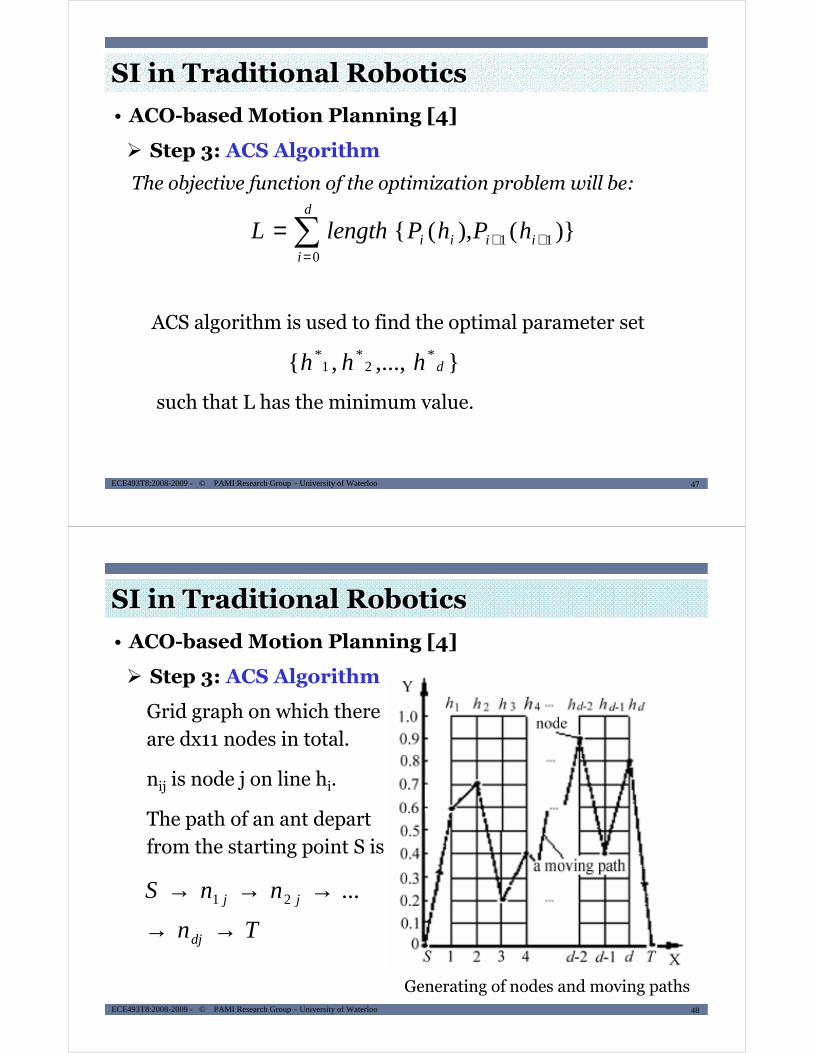
� Step 3: ACS Algorithm
Generating of nodes and moving paths
Grid graph on which there
are dx11 nodes in total.
nij is node j on line hi.
The path of an ant depart
from the starting point S is
Tn
nnS
dj
jj
→→
→→→ ...21
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 49/2249ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
Assume that at initial time t =0
All the nodes have the same pheromone concentration τ0:
)10,...,2,1,0 ;,...,2,1()0( === jdioij ττ
◊ Pheromone Concentration
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 50/2250ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Transition Rule
In moving process, for an ant k, when it locates on line hi-1, it
will choose a node j from the eleven nodes of the next line hi to move to according to the following rule:
Assume the number of ants is m.
≤
= ∈
,
},])].[({[max arg
o
oiuiuAu
qqifJ
qqiftj
f
βητ
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 51/2251ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Transition Rule
≤
= ∈
,
},])].[({[max arg
o
oiuiuAu
qqifJ
qqiftj
f
βητ
where
A represents the set: {0, 1, 2, . . . , 10};
τiu(t) is the pheromone concentration of node niu;
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 52/2252ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Transition Rule
ηiu represents the visibility of node niu and is computed by the following equation:
≤
= ∈
,
},])].[({[max arg
o
oiuiuAu
qqifJ
qqiftj
f
βητ
1.1
1.1 *ijij
ij
yy −−=η
• ACO-based Motion Planning [4]
yij is the y-coordinate of node nij and y*ij are values that are
corresponding to the path nodes on the optimal robot path
generated by the ACS algorithm in the previous iteration.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 53/2253ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Transition Rule
β is an adjustable parameter which controls the relative importance of visibility ηiu versus pheromone concentrationτiu(t);
q is a random variable uniformly distributed over [0, 1]; q0 is a
tunable parameter (0≤q0≤ 1);
≤
= ∈
,
},])].[({[max arg
o
oiuiuAu
qqifJ
qqiftj
f
βητ
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 54/2254ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Transition Rule
J is a node which is selected according to the following
probability formula and “Roulette Wheel Selection Method”
≤
= ∈
,
},])].[({[max arg
o
oiuiuAu
qqifJ
qqiftj
f
βητ
∑=
= 10
0
])].[([
])].[([)(
ω
β
β
ητ
ητ
iwiw
iJiJkiJ
t
ttP
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 55/2255ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Pheromone Update: After Each Iteration
)(.)().1()( ttt ijijij τρτρτ ∆+−←
10 pp ρ
+=∆L
tij
1)(τ
where L+ is the length of robot path corresponding to the
best ant tour.
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 56/2256ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Step 3: ACS Algorithm
◊ Pheromone Update: After passing through a node nij
oijij tt τρτρτ .)().1()( +−←
When a node is visited several times by ants, repeatedly
applying the local updating rule will make the pheromone
level of this node diminish.
This has the effect of making the visited nodes less and
less attractive to the ants, which indirectly favors the
exploration of not yet visited nodes.
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 57/2257ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
� Results
Average CPU time needed for obtaining
optimal solution (sec.)
Average number of iterations needed for convergence
Average CPU time per
iteration (sec.)
0.61100.1033
912175
0. 000670. 00059
Real-coded GA
ACS Algorithm
• ACO-based Motion Planning [4]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 58/2258ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
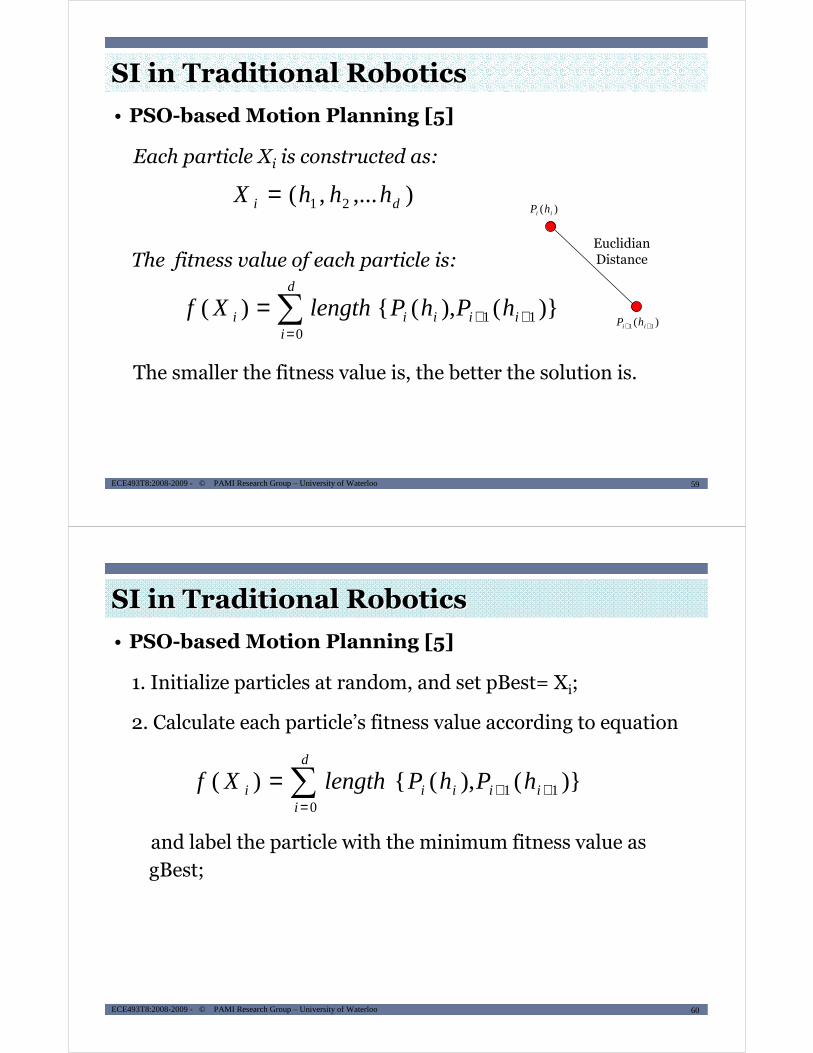
• PSO-based Motion Planning [5]
Sub-optimal path from Dijkstra algorithm is
1210 ... +→→→→ dPPPP
These path nodes lie on the middle points of the relevant free
MAKLINK lines. Location adjustment:
dihhPPPP iiiiii ,...,2,1 ],1,0[ ,)( 121 =∈×−+=
Path Coding Method
1
midpoint 5.0 2/)(
0
2
21
1
===+=
==
iii
iiii
iii
hPP
hPPP
hPP
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 59/2259ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
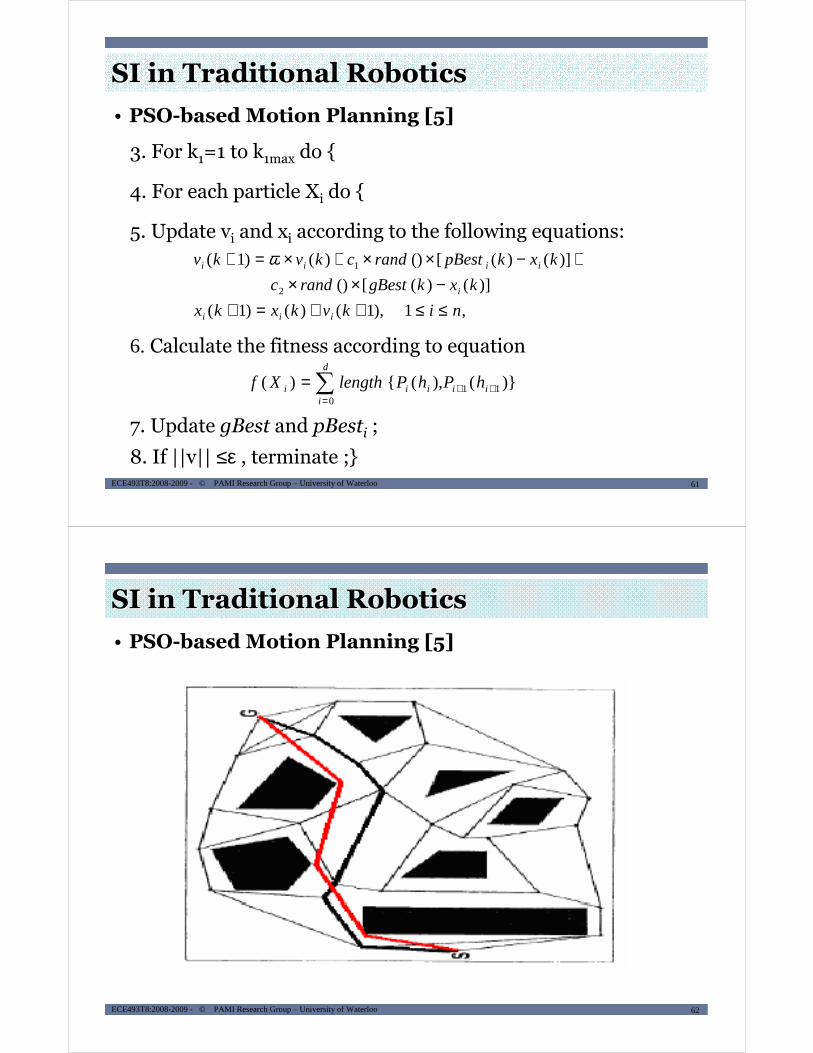
Each particle Xi is constructed as:
),...,( 21 di hhhX =
The fitness value of each particle is:
)}(),({)( 110
++=∑= ii
d
iiii hPhPlengthXf
)( 11 ++ ii hP
)( ii hP
Euclidian Distance
The smaller the fitness value is, the better the solution is.
• PSO-based Motion Planning [5]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 60/2260ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
1. Initialize particles at random, and set pBest= Xi;
2. Calculate each particle’s fitness value according to equation
and label the particle with the minimum fitness value as
gBest;
)}(),({)( 110
++=∑= ii
d
iiii hPhPlengthXf
• PSO-based Motion Planning [5]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 61/2261ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Traditional RoboticsSI in Traditional Robotics
3. For k1=1 to k1max do {
4. For each particle Xi do {
5. Update vi and xi according to the following equations:
6. Calculate the fitness according to equation
7. Update gBest and pBesti ;
8. If ||v|| ≤ε , terminate ;}
,1 ),1()()1(
)]()([()
)]()([())()1(
2
1
nikvkxkx
kxkgBestrandc
kxkpBestrandckvkv
iii
i
iiii
≤≤++=+−××
+−××+×=+ ω
)}(),({)( 110
++=∑= ii
d
iiii hPhPlengthXf
• PSO-based Motion Planning [5]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 62/2262ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
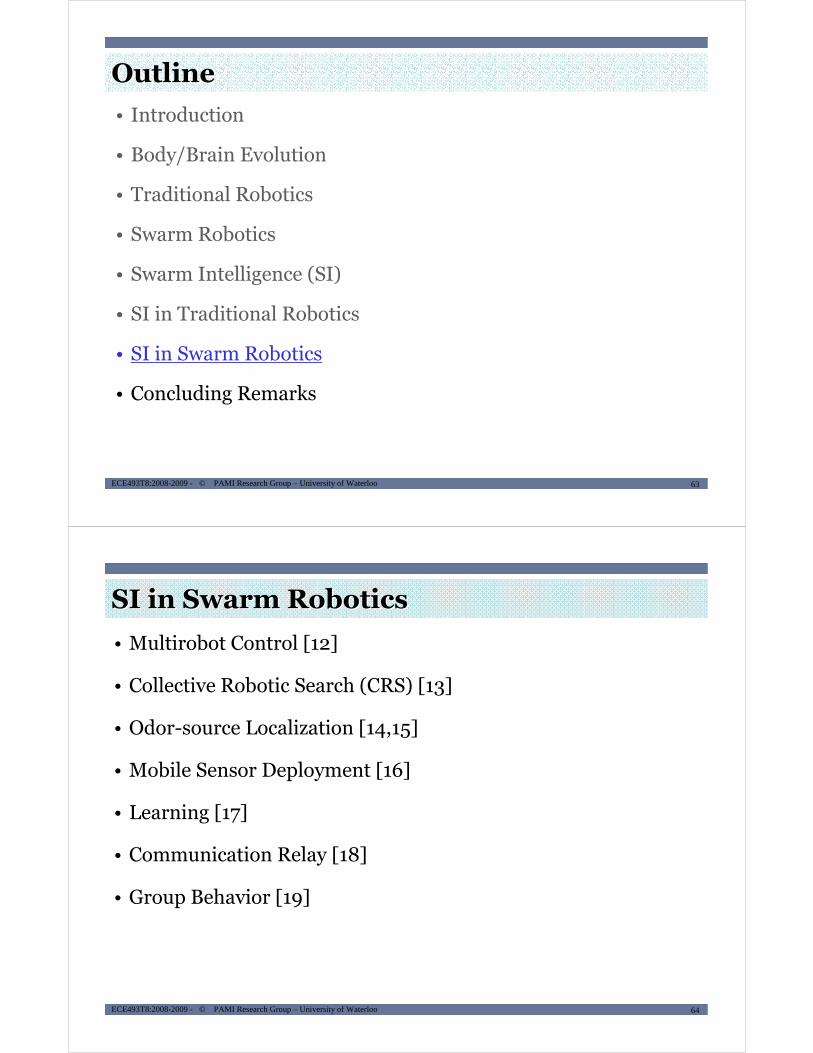
SI in Traditional RoboticsSI in Traditional Robotics
• PSO-based Motion Planning [5]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 63/2263ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 64/2264ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
SI in Swarm RoboticsSI in Swarm Robotics
• Multirobot Control [12]
• Collective Robotic Search (CRS) [13]
• Odor-source Localization [14,15]
• Mobile Sensor Deployment [16]
• Learning [17]
• Communication Relay [18]
• Group Behavior [19]
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 65/2265ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
Unintelligent carts are commonly found in large
airports. Travelers pick up carts at designated
points and leave them in arbitrary places. It is a
considerable task to re-collect them.
It is, therefore, desirable that intelligent carts (intelligent robots)
draw themselves together automatically.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 66/2266ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� Objectives
Using mobile software agents to locate robots scattered in a
field, e.g. an airport, and make them autonomously
determine their moving behaviors by using an ACO-based
clustering algorithm.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 67/2267ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
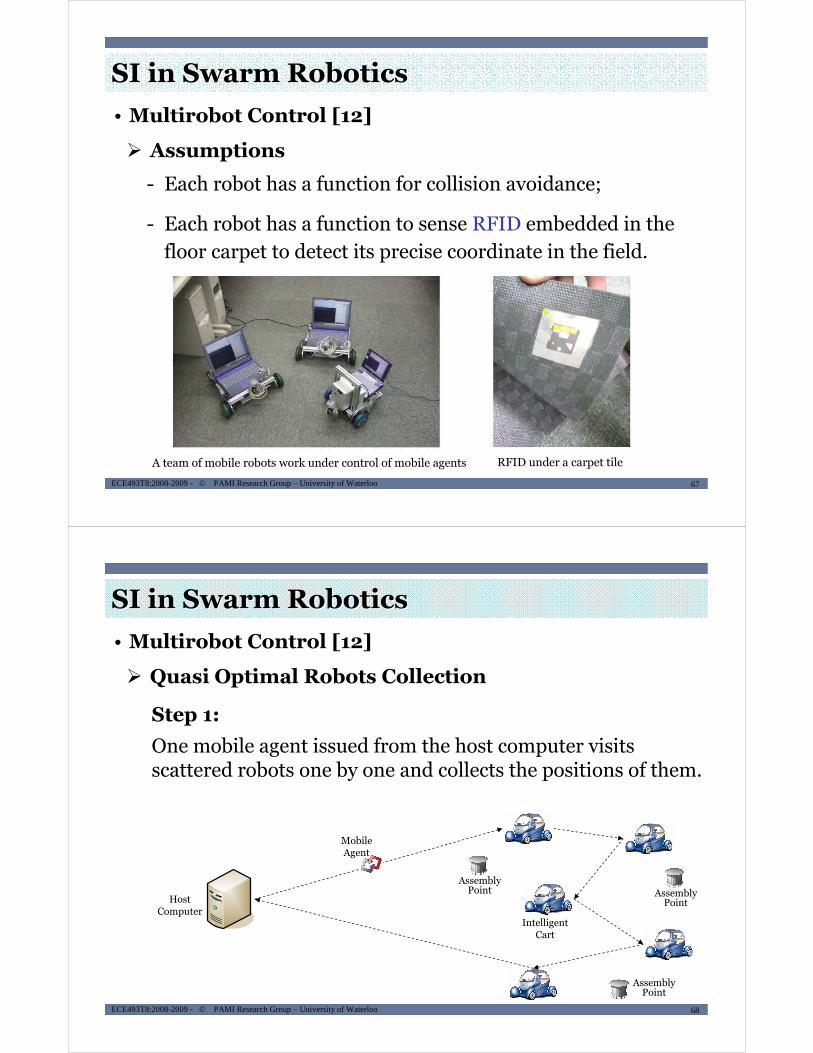
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� Assumptions
- Each robot has a function for collision avoidance;
- Each robot has a function to sense RFID embedded in the
floor carpet to detect its precise coordinate in the field.
A team of mobile robots work under control of mobile agents RFID under a carpet tile
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 68/2268ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� Quasi Optimal Robots Collection
Step 1:
One mobile agent issued from the host computer visits scattered robots one by one and collects the positions of them.
Mobile Agent
AssemblyPoint
AssemblyPoint
AssemblyPoint
IntelligentCart
HostComputer

MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 69/2269ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� Quasi Optimal Robots Collection
Step 2:
Another agent called the simulation agent, performs ACC algorithm and produces the quasi optimal gathering positions for the mobile robots. The simulation agent is a static agentthat resides in the host computer.
HostComputer
AssemblyPoint
AssemblyPoint
AssemblyPoint
IntelligentCartSimulation
Agent
ACO-based Clustering
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 70/2270ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� Quasi Optimal Robots Collection
Step 3:
A number of mobile agents are issued from the host computer. One mobile agent migrates to a designated mobile robot, and drives the robot to the assigned quasi optimal position that is calculated in step 2.
HostComputer
AssemblyPoint
AssemblyPoint
AssemblyPoint
IntelligentCart
Mobile Agents
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 71/2271ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
- More objects are clustered in a place where strong
pheromone sensed.
- When the artificial ant finds a cluster with certain number
of objects, it tends to avoid picking up an object from the
cluster. This number can be updated later.
- If the artificial ant cannot find any cluster with certain
strength of pheromone, it just continues a random walk.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 72/2272ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
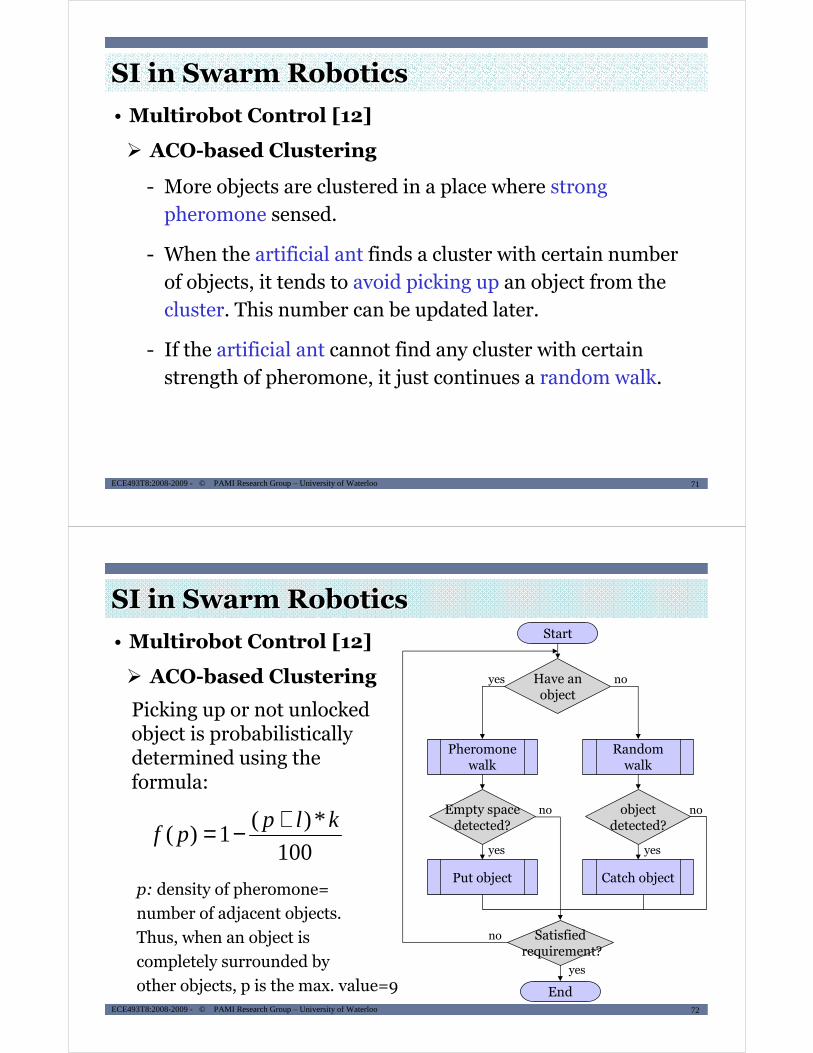
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
Start
Have anobject
Pheromonewalk
Randomwalk
Empty spacedetected?
objectdetected?
Put object Catch object
Satisfiedrequirement?
End
yes yes
yes
yes no
nono
no
Picking up or not unlocked object is probabilistically determined using the formula:
100
*)(1)(
klppf
+−=
p: density of pheromone=
number of adjacent objects.
Thus, when an object is
completely surrounded by
other objects, p is the max. value=9
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 73/2273ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
100
*)(1)(
klppf
+−=
k: constant value
Authors selected k= 13 in order to prevent any object surrounded
by other eight objects be picked up.
(never pick it up).004.004.11100
13*)08(1)( ≈−=−=+−=pf
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 74/2274ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
100
*)(1)(
klppf
+−=
l: constant value to make an object be locked.
l = zero (not locked).
If c=# of clusters & o=# of objects
19
37 and 31
63 and 32
=⇒
=⇒
=⇒
lp
lpoc
lpoc
f
fp
fp
Any objects meet these conditions are locked. This lock process prevents artificial ants remove objects from growing clusters.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 75/2275ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
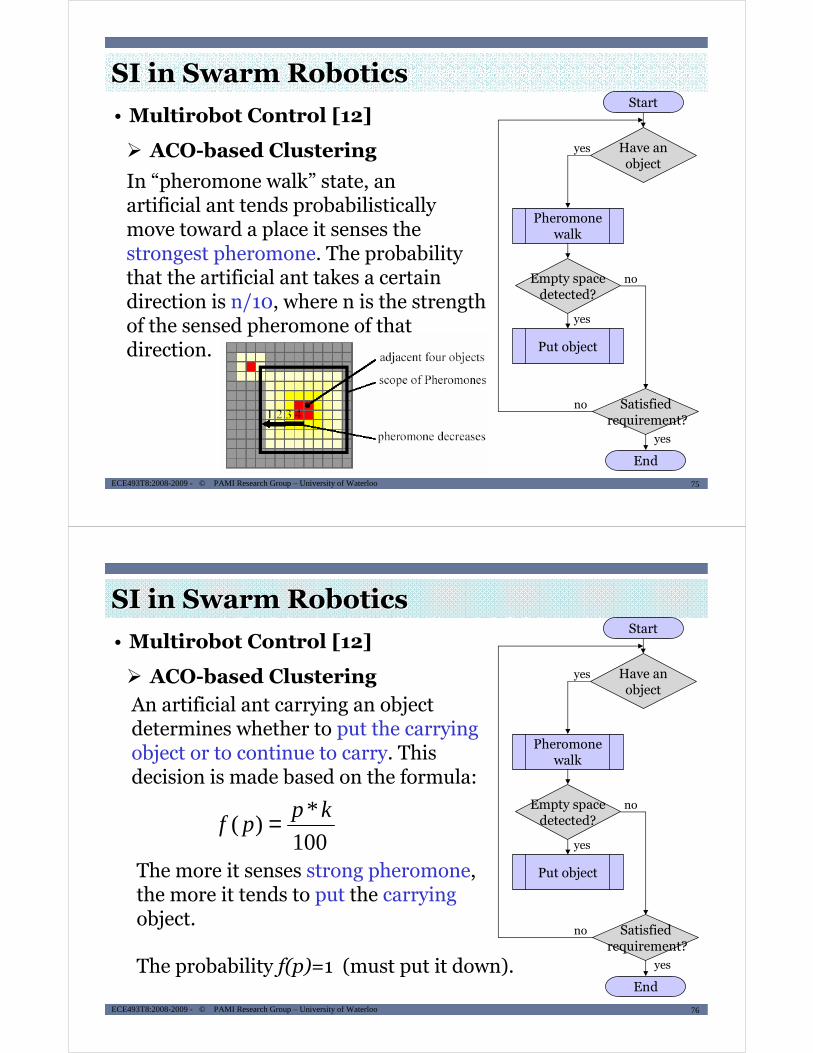
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
Start
Have anobject
Pheromonewalk
Empty spacedetected?
Put object
Satisfiedrequirement?
End
yes
yes
yes
no
no
In “pheromone walk” state, anartificial ant tends probabilistically move toward a place it senses the strongest pheromone. The probability that the artificial ant takes a certain direction is n/10, where n is the strength of the sensed pheromone of that direction.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 76/2276ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
Start
Have anobject
Pheromonewalk
Empty spacedetected?
Put object
Satisfiedrequirement?
End
yes
yes
yes
no
no
An artificial ant carrying an object determines whether to put the carrying object or to continue to carry. This decision is made based on the formula:
100
*)(
kppf =
The more it senses strong pheromone, the more it tends to put the carrying object.
The probability f(p)=1 (must put it down).
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 77/2277ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
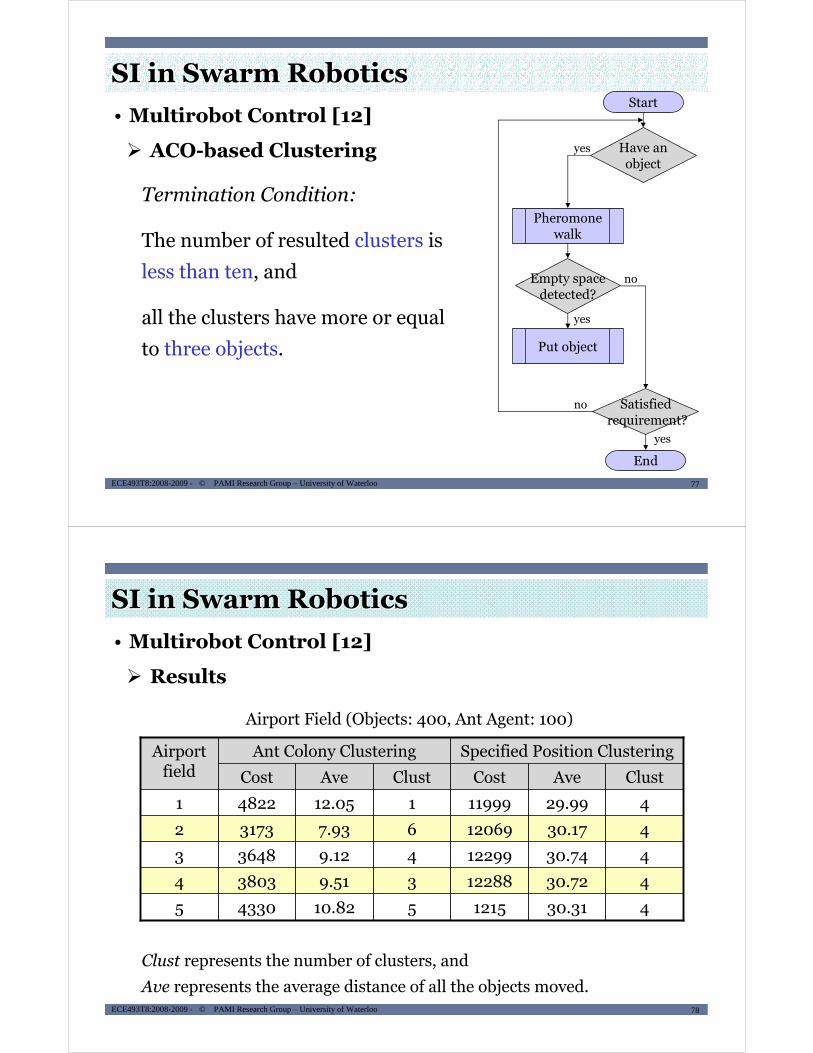
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� ACO-based Clustering
Start
Have anobject
Pheromonewalk
Empty spacedetected?
Put object
Satisfiedrequirement?
End
yes
yes
yes
no
no
Termination Condition:
The number of resulted clusters is
less than ten, and
all the clusters have more or equal
to three objects.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 78/2278ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Multirobot Control [12]
SI in Swarm RoboticsSI in Swarm Robotics
� Results
430.311215510.8243305
430.721228839.5138034
430.741229949.1236483
430.171206967.9331732
429.9911999112.0548221
ClustAveCostClustAveCost
Specified Position ClusteringAnt Colony ClusteringAirport field
Airport Field (Objects: 400, Ant Agent: 100)
Clust represents the number of clusters, and
Ave represents the average distance of all the objects moved.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 79/2279ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
A group of unmanned mobile robots are searching for a specified
target in a high risk environment.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 80/2280ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
- A number of robots/particles are randomly dropped into a
specified area and flown through the search space with one
new position calculated for each particle per iteration;
- The coordinates of the target are known and the robots use
a fitness function, in this case the Euclidean distance of the
individual robots relative to the target, to analyze the status
of their current position;
- Obstacle’s boundary coordinates are known.
� Assumptions
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 81/2281ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
� PSO-CRS Algorithm
Step 1:
A population of robots is
initialized in the search
environment containing a
target and an obstacle,
with random positions,
velocities, personal best
positions (pid), and global
best position (pgd).
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 82/2282ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
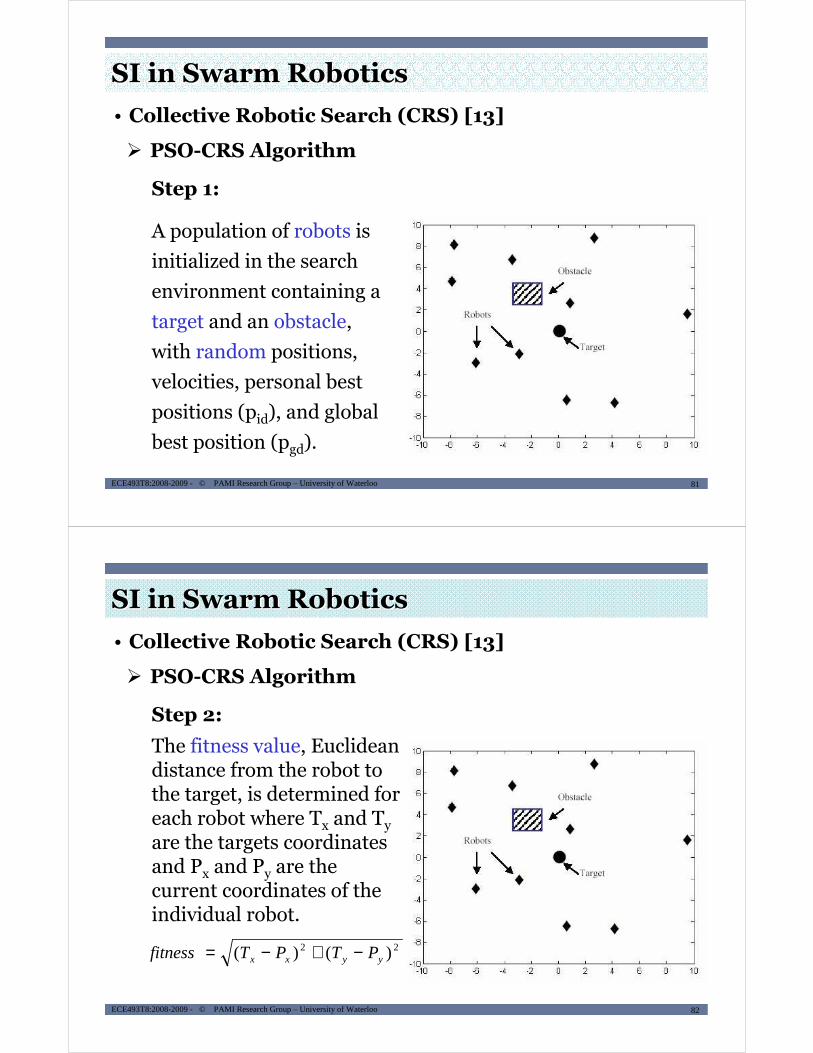
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
� PSO-CRS Algorithm
Step 2:
The fitness value, Euclidean distance from the robot to the target, is determined for each robot where Tx and Tyare the targets coordinates and Px and Py are the current coordinates of the individual robot.
22 )()( yyxx PTPTfitness −+−=
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 83/2283ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
� PSO-CRS Algorithm
Step 3:
The robot’s fitness is compared with its previous best fitness(pBestid) for every iteration to determine the next possible coordinate position for each robot in the search environment. The next possible velocity and position of each robot are determined according to the following equations:
)1()()1(
)]()([()
)]()([())()1(
2
1
++=+−××
+−××+×=+
kvkxkx
kxkgBestrandc
kxkpBestrandckvkv
ididid
idd
idididid ω
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 84/2284ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
� PSO-CRS Algorithm
Step 4:
If the next possible position xid(k+1) resides within the obstacle space, the obstacle avoidance mechanism is employed,
otherwise the robot moves to this new position.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 85/2285ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
� PSO-CRS Algorithm
Obstacle avoidance mechanism:
)points,,_,_,_,_(
),,(
dircenterycenterxstartystartxarc
nextverthoriz =
dir: CW – CCWpoints=4
The new position of the particle is set at the second point in the arc.
nearest corner of the obstacle
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 86/2286ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
� PSO-CRS Algorithm
Step 5:
The pBestid with the best fitness for the entire swarm isdetermined and the global best coordinate location, gBestd, isupdated with this pBestid.
Step 6:
Until convergence is reached, repeat steps.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 87/2287ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
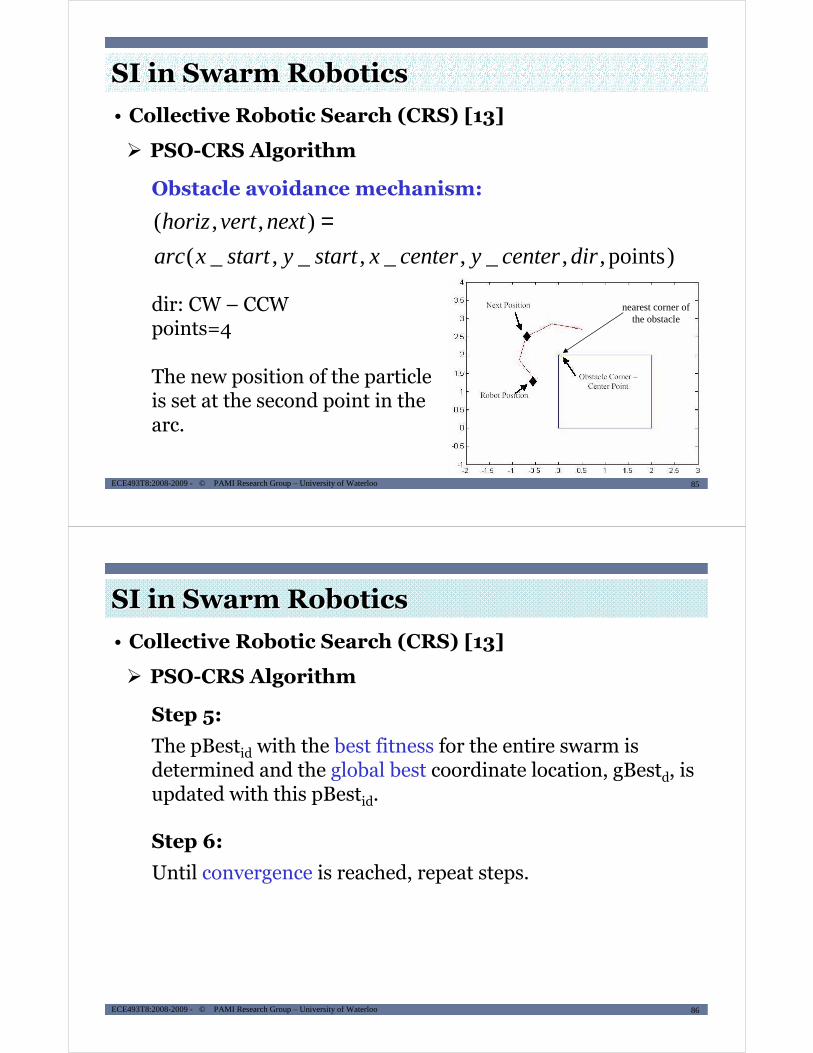
� Simulation Results
Search space: 20 by 20 units.
Vmax = 0.5 units.
# of robots = 10
# of targets = 1
# of obstacles=1
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 88/2288ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
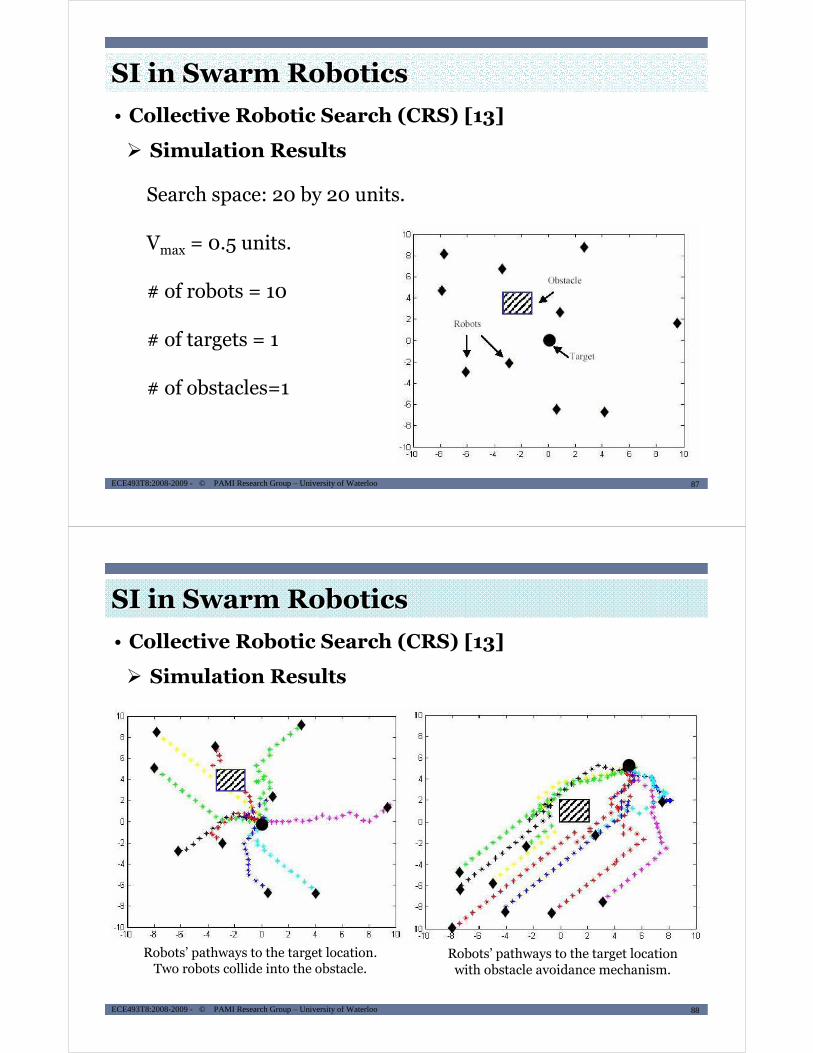
� Simulation Results
Robots’ pathways to the target location. Two robots collide into the obstacle.
Robots’ pathways to the target location with obstacle avoidance mechanism.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 89/2289ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
• Collective Robotic Search (CRS) [13]
SI in Swarm RoboticsSI in Swarm Robotics
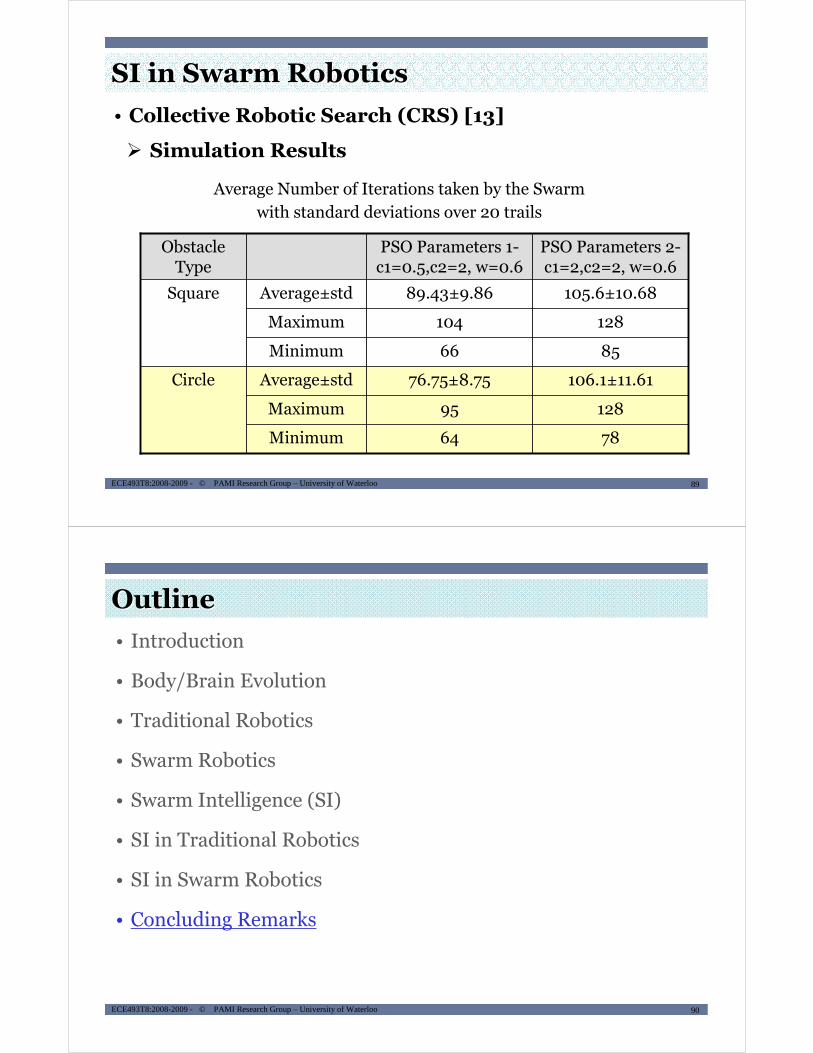
� Simulation Results
Average Number of Iterations taken by the Swarm
with standard deviations over 20 trails
7864Minimum
12895Maximum
106.1±11.6176.75±8.75Average±stdCircle
8566Minimum
128104Maximum
105.6±10.6889.43±9.86Average±stdSquare
PSO Parameters 2-c1=2,c2=2, w=0.6
PSO Parameters 1-c1=0.5,c2=2, w=0.6
Obstacle Type
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 90/2290ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
OutlineOutline
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo
• Introduction
• Body/Brain Evolution
• Traditional Robotics
• Swarm Robotics
• Swarm Intelligence (SI)
• SI in Traditional Robotics
• SI in Swarm Robotics
• Concluding Remarks
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 91/2291ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
Concluding RemarksConcluding Remarks
• Swarm intelligence techniques such as Ant Colony Optimization
(ACO) and Particle Swarm Optimization (PSO) have shown to
be an effective global optimization algorithms in traditional and
swam robotics.
• ACO and PSO have been successfully applied in solving
problems such as motion planning, gait optimization, group
behavior, control, learning, odor-source localization, collective
robotic search and mobile sensor deployment, to mention a few.
MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 92/2292ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
ReferencesReferences[1] E. Sahin and A. Winfield, “Special issue on swarm robotics,” Swarm Intelligence, 2: 69–72, Springer Science, 2008.
[2] Pasteels et al. From Individual to Collective Behavior in Social Insects. Pages 155-175, 1987.
[3] Richard Vaughan, “Massively multi-robot simulation in stage,” Swarm Intelligence 2: 189–208, 2008.
[4] T. Guan-Zheng, H. Huan and S. Aaron, "Ant Colony System Algorithm for Real-Time Globally Optimal Path Planning of Mobile Robots", Acta Automatica Sinica, 33(3), p. 279-285, March 2007.
[5] Xueping Zhang, Hui Yin, Hongmei Zhang and Zhongshan Fan, “Spatial Clustering with Obstacles Constraints by Hybrid Particle Swarm Optimization with GA Mutation “, LNCS, Springer, ISBN 978-3-540-87731-8, pp.569-578, 2008.
[6] Mehtap Kose and Adnan Acan, “Knowledge Incorporation into ACO-Based Autonomous Mobile Robot Navigation”, LNCS, Springer, ISBN 978-3-540-23526-2, pp. 41-50, 2004.
[7] Cord Niehaus, Thomas R¨ofer, Tim Laue, "Gait Optimization on a Humanoid Robot using Particle Swarm Optimization", The second workshop on Humanoid Soccer Robots, 2007.
[8] Gursel Alıcıa, Romuald Jagielskib, Y. Ahmet Sekerciogluc, Bijan Shirinzadehd, “Prediction of geometric errors of robot manipulators with Particle Swarm Optimisation method”, Robotics and Autonomous Systems 54, pp. 956–966, 2006.
[9] Takeshi Matsui, Masatoshi Sakawa, Takeshi Uno, Kosuke Kato, Mitsuru Higashimori, and Makoto Kaneko, "Particle Swarm Optimization for Jump Height Maximization of a Serial Link Robot", Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol.11, No.8 pp. 956-963, 2007.
[10] Fabien Moutarde, “A robot behavior-learning experiment using Particle Swarm Optimization for training a neural-based Animat”, 10th International Conference on Control, Automation, Robotics and Vision (ICARCV 2008), 2008.

MUSES_SECRET: ORF-RE Project - © PAMI Research Group – University of Waterloo 93/2293ECE493T8:2008-2009 - © PAMI Research Group – University of Waterloo
ReferencesReferences[11] Maki K. HABIB, Hajime ASAMA, “Efficient method to generate collision free paths for autonomous mobile robot based on new free space structuring approach,” In Proceedings of International Workshop on Intelligent Robots and Systems. Japan, November, 1991, 563-567.[12] Yasushi Kambayashi, Yasuhiro Tsujimura, Hidemi Yamachi, Munehiro Takimoto and Hisashi Yamamoto, “Design of a Multi-Robot System Using Mobile Agents with Ant Colony Clustering”, Proceedings of the 42nd
Hawaii International Conference on System Sciences - 2009.[13] Smith, L., Venayagamoorthy, G. K. and Holloway, P. (2006): Obstacle Avoidance in Collective Robotic Search Using Particle Swarm Optimization. IEEE Swarm Intelligence Symposium, Indianapolis, Indiana, USA, May 2006.[14] Fei Li, Qing-Hao Meng, Shuang Bai, Ji-Gong Li and Dorin Popescu, "Probability-PSO Algorithm for Multi-robot Based Odor Source Localization in Ventilated Indoor Environmen", LNCS, Springer, 978-3-540-88512-2, pp. 1206-1215, 2008.[15] Wisnu Jatmiko, Petrus Mursanto, Benyamin Kusumoputro, Kosuke Sekiyama and Toshio Fukuda, "Modified PSO algorithm based on flow of wind for odor source localization problems in dynamic environments", WSEAS TRANSACTIONS on SYSTEMS archive, 7(2), pp. 106-113, 2008.[16] Wu Xiaoling, Shu Lei, Yang Jie, Xu Hui, Jinsung Cho and Sungyoung Lee,“Swarm Based Sensor Deployment Optimization in Ad Hoc Sensor Networks,“ LNCS, Springer, ISBN 978-3-540-30881-2, pp. 533-541, 2005.
[17] Jim Pugh and Alcherio Martinoli, “Multi-robot learning with particle swarm optimization”, International Conference on Autonomous Agents,ISBN:1-59593-303-4, p. 441-448, Japan, 2006.
[18] Sabine Hauert, Laurent Winkler, Jean-Christophe Zufferey, and Dario Floreano, “Ant-based swarming with positionless micro air vehicles for communication relay”, Swarm Intell (2008) 2: 167–188. 2008.
[19] Yan Meng, Olorundamilola Kazeem and Juan C. Muller, “A Hybrid ACO/PSO Control Algorithm for Distributed Swarm Robots,” Proceedings of the 2007 IEEE Swarm Intelligence Symposium (SIS 2007).