Embed Size (px)
Citation preview
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Control Methods for High-SpeedSupercavitation Vehicles
Preliminary Oral Exam Presentation
Bálint Vanek
Department of Aerospace Engineering and MechanicsUniversity of Minnesota
Advisor: Prof. Gary Balas6th of September, 2006
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Outline
1 MotivationSupercavitationHigh-Speed Supercavitating VehicleOverall ObjectivesPrevious Work
2 Future ResearchResearch DirectionLPV ModelingSimulation and Implementation
3 Summary
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Background
• M.S. in Mechanical Engineering, Budapest University ofTechnology and Economics, 2003
• Thesis: Solution for Control Problems in AircraftFormation Flight, Advisor: Prof. József Bokor
• Hungarian Champion in Swimming (1998-2002)• Ph.D student under Prof. Gary Balas since August
2004
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
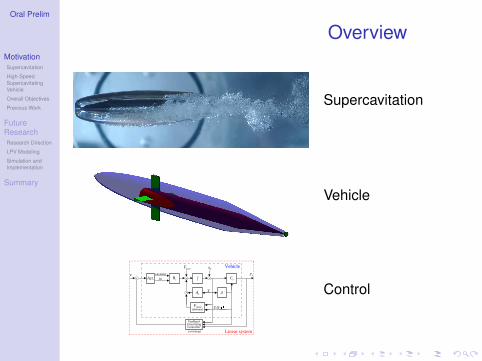
Overview
Supercavitation
Vehicle
Vehicle
fincavitator
Feedback Linearizing Controller
cB.Actv
gravF 0x
∫ sC
cA
planeF
δ
(Bimodal)
sy
(switching) Linear system
x (t-_
x_ Control
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
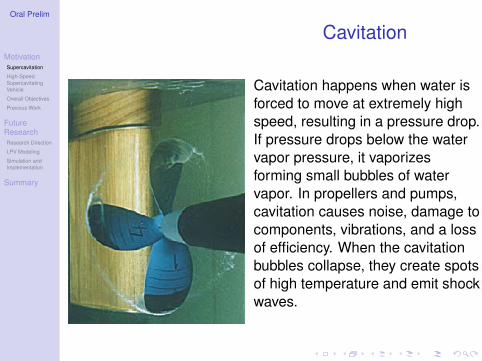
Cavitation
Cavitation happens when water isforced to move at extremely highspeed, resulting in a pressure drop.If pressure drops below the watervapor pressure, it vaporizesforming small bubbles of watervapor. In propellers and pumps,cavitation causes noise, damage tocomponents, vibrations, and a lossof efficiency. When the cavitationbubbles collapse, they create spotsof high temperature and emit shockwaves.
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
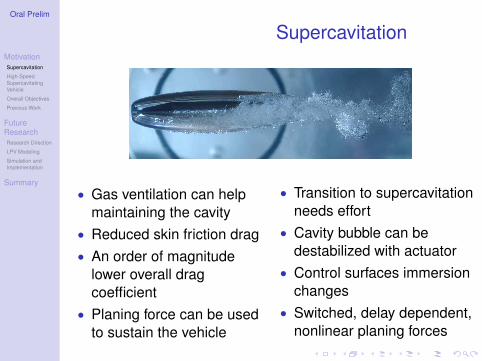
Supercavitation
• Gas ventilation can helpmaintaining the cavity
• Reduced skin friction drag• An order of magnitude
lower overall dragcoefficient
• Planing force can be usedto sustain the vehicle
• Transition to supercavitationneeds effort
• Cavity bubble can bedestabilized with actuator
• Control surfaces immersionchanges
• Switched, delay dependent,nonlinear planing forces
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
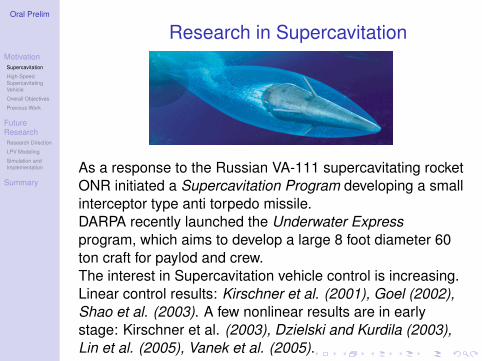
Research in Supercavitation
As a response to the Russian VA-111 supercavitating rocketONR initiated a Supercavitation Program developing a smallinterceptor type anti torpedo missile.DARPA recently launched the Underwater Expressprogram, which aims to develop a large 8 foot diameter 60ton craft for paylod and crew.The interest in Supercavitation vehicle control is increasing.Linear control results: Kirschner et al. (2001), Goel (2002),Shao et al. (2003). A few nonlinear results are in earlystage: Kirschner et al. (2003), Dzielski and Kurdila (2003),Lin et al. (2005), Vanek et al. (2005).
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
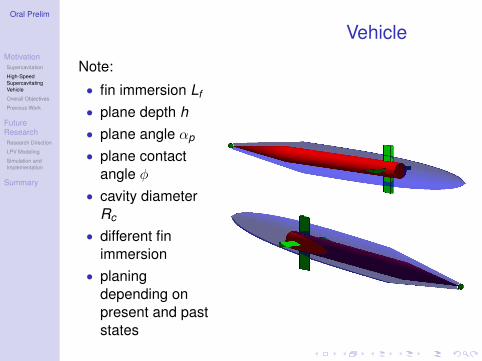
Vehicle
Note:
• fin immersion Lf
• plane depth h• plane angle αp
• plane contactangle φ
• cavity diameterRc
• different finimmersion
• planingdepending onpresent and paststates
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
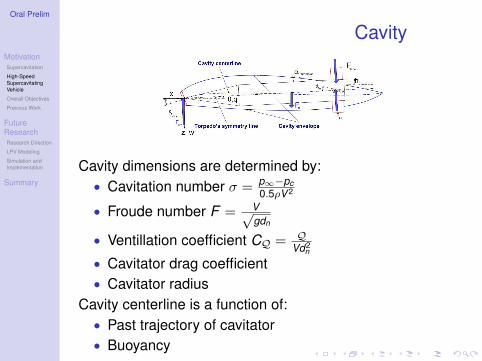
Cavity
Cavity dimensions are determined by:• Cavitation number σ = p∞−pc
0.5ρV 2
• Froude number F = V√gdn
• Ventillation coefficient CQ = QVd2
n
• Cavitator drag coefficient• Cavitator radius
Cavity centerline is a function of:• Past trajectory of cavitator• Buoyancy
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Research GoalsNonlinear Control Law Development for the High-SpeedSupercavitation Vehicle (HSSV)• Develop a robust controller for the full 6-DOF nonlinear,
switching, delay dependent HSSV model• Establish stabilizeability and detectability criteria for the
system• Develop a systematic way to design control laws valid
for the full operating envelope• Control approach and controllability analysis should be
valid for a wider class of systemsRequirements:• Guidance level tracking, with emphasis on drag
reduction• Single framework for control laws through the flight
envelope, including transition phase and planing
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Challenges, RequirementsThe body is not fully wetted implies that the problem isfundamentally different from the control of torpedoes:• Transition from fully wetted to supercavitating operation requires the
adaptation of control laws with speed
• Slope discontinuous force curves depending on immersion requirelookup tables
• Immersion to liquid shows time-delay effects
• Inherently unstable vehicle behavior with cavitator, non-minimumphasedness with fins
Requirements:• Fins supporting the tail are required for the initial phase, but can be
retractable during operation to provide only roll control, reducingdrag
• Control laws should take into account the fins efficiency due toimmersion
• Vehicle motion and wetted areas should be optimized for sensorperformance and cavity shape
• Control laws should utilize the benefits of planing for agility
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
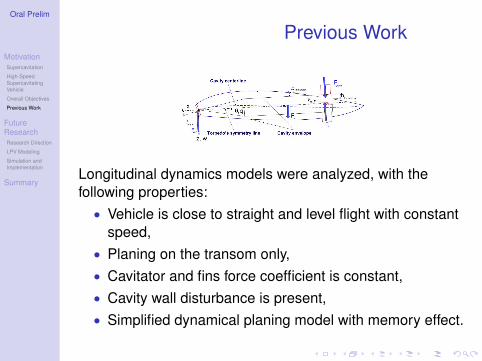
Previous Work
Longitudinal dynamics models were analyzed, with thefollowing properties:• Vehicle is close to straight and level flight with constant
speed,• Planing on the transom only,• Cavitator and fins force coefficient is constant,• Cavity wall disturbance is present,• Simplified dynamical planing model with memory effect.

Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Control MethodVehicle
fincavitator
Feedback Linearizing Controller
cB.Actv
gravF 0x
∫ sC
cA
planeF
δ
(Bimodal)
sy
(switching) Linear system
x (t-_
x_
Two loop structure with switching inner-loop, feedbacklinearizing controller, to eliminate nonlinearities and delaydependence introduced by planing• Control design synthesized in a multivariable canonic
coordinate frame• Switching state dependent feedback• The system dynamics is the same regardless of the
interior switching state• One linear outer loop controller can provide reference
tracking
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
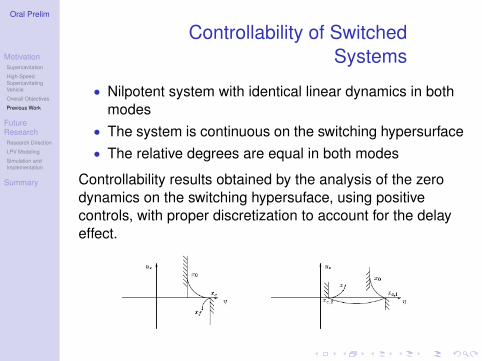
Controllability of SwitchedSystems
• Nilpotent system with identical linear dynamics in bothmodes
• The system is continuous on the switching hypersurface• The relative degrees are equal in both modes
Controllability results obtained by the analysis of the zerodynamics on the switching hypersuface, using positivecontrols, with proper discretization to account for the delayeffect.
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Previous Results
Publications on longitudinalplane vehicle control:
• Control design with simple outer loop controlBalas,Bokor,Vanek,Arndt (Springer, 2006)
• Constrained Receding Horizon ControlVanek,Balas,Bokor,Arndt (J. of Vibration and Control,2006)
• Controllability guaranties of the switched systemVanek,Bokor,Balas (ACC, 2006)
• Stability and tracking trade-off studies using one controlsurface Vanek,Balas (ONR Workshop, 2006)
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Motivation of Future Directions
The preceding results with several limiting assumptions hasto be extended to a more comprehensive control law.• Control should be velocity dependent• Differen performance objectives apply to fins based on
immersion, to limit saturation and respect effectiveness• Variable fin detachment has to be included• Planing avoidance should be also adapted by velocity
and available control authorityThese requirements with several parameter dependentcoefficients, which can be measured online suggest the usage ofLinear Parameter-Varying control methods. However, thedynamics depend on the switched planing force also. Theproblem can be resolved with a similar dynamic inversion controllaw, to obtain similar LPV systems on both sides of the switchingsurface.
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
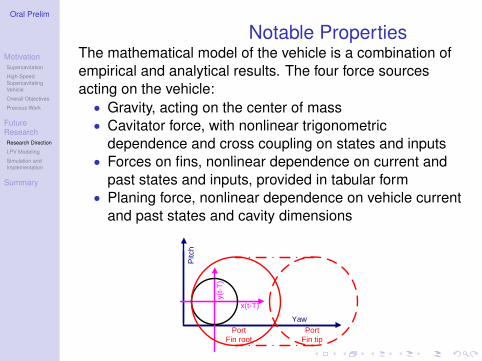
Notable PropertiesThe mathematical model of the vehicle is a combination ofempirical and analytical results. The four force sourcesacting on the vehicle:• Gravity, acting on the center of mass• Cavitator force, with nonlinear trigonometric
dependence and cross coupling on states and inputs• Forces on fins, nonlinear dependence on current and
past states and inputs, provided in tabular form• Planing force, nonlinear dependence on vehicle current
and past states and cavity dimensions
Pitc
h
Yaw
x,y(
t-T)
PortFin tip
Port Fin root
y(t-T
)
x(t-T)
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Research Direction
Overall objective: Nonlinear 6-DOF control of the HighSpeed Supercavitation Vehicle
• The control philosophy developed earlier can beextended to the parameter scheduled plants
• Nonlinear delay dependent feedback to transform thesystem into a Linear Parameter-Varying (LPV) model inall switched modes
• LPV control of the switched LPV systems to guaranteerobust stability and tracking objectives
• Stability and controllability analysis of nonlinearsystems using nonlinear feedback for LPVtransformation
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Motivation for theFeedback-LPV Inner-Loop
• A similar system architecture developed earlier can beextended to the full vehicle model including stability andcontrollability properties
• Nonlinearities associated with planing can be decoupledfrom the other system dynamics
• The system in all switched modes can be treated in thesame framework
• The delay dependent behavior can be effectively handled bydelay dependent feedback
• Planing forces cause large disturbances which can bebeneficial for steering but also destabilize the vehicle
• The fins immersion and velocity dependence make a naturalchoice to derive a parameter dependent inner-loop system
• The effects of planing can be suppressed based on the needof planing free or planing supported operation
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Motivation for LPV control• Requirements for velocity and fin immersion dependent
control laws can be handled by gain scheduled controlmethods
• LPV framework can incorporate switches betweensystems (since parameter rate could be infinite)
• Uncertain vehicle and cavity parameters require arobust controller synthesis tool
• Performance requirements can be set up based onparameter values in different frequency regions
• Admissible parameter space for the HSSV is wellcharacterized
• Constrained control like MPC or set-theoretic methodsare available for LPV systems
• The system dynamics after applying the nonlinearfeedback is similar to a missile, which makes themethod comparable with other methods
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Quasi LPV Model
[x1x2
]=
[A11(x1, ρ) A12(x1, ρ)A21(x1, ρ) A22(x1, ρ)
] [x1x2
]+
[B1(x1, ρ)B2(x1, ρ)
]δ
(1)
• ρ exogenous time-varying parameter vector• x1 subset of states, in LPV synthesis treated as
independent• Control input δ must enter affinely• Many nonlinear system can be described exactly in
LPV form• Techniques are available to treat systems nonlinear in
input
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Motivation for Stability andControllability Analysis
• The system is nonlinear,switched and delay dependentproviding a valuable reference for future controlresearch
• The nonlinear feedback and common LPV form couldsimplify the controllability analysis of the system
• Many results in switched and delay dependent systemsare available for linear case only
• The connection between switched systems and LPVsystems is an emerging field of research
• No results are available for the case when relativedegrees of the different switched systems are different,like when retracting the fins
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Further ObjectivesThe cross coupling between the vehicle set-up and thecontrol performance objectives need special attentionduring the design. There are several performancerequirements besides position tracking:• Control design and simulation with water tunnel tests
have to identify the optimal control surfaces, to reducedrag and provide the best platform for sensors
• The steering policy such as bank-to-turn has to bedecided
• The onboard sensors will likely to be noisy hence thecontrol laws have to account for that
• The question of using planing for steering is also underdebate
Systems and control analysis could provide severalguidelines for the optimal configuration.
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Hardware in-the-loop SimulationThe proposed control methods can be evaluated on a"quarter" vehicle model at the high speed water tunnel at St.Antony Falls• Resulting forces and moments on cavitator and fins can
be measured with force cells• The interaction between a dynamically actuated fin
immersed into a dynamically changing cavity is not wellunderstood
• Different control scenarios can be evaluated in a closeto real-world system
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Accomplishments,GoalsAccomplishments:• Control law design for the longitudinal dynamics model
of the vehicle• Controllability test for a general class of nonlinear,
switched, delay dependent systems• Reference tracking results with several variations of the
main architectureObjective groups:• Develop a control design oriented 6-DOF model of the
vehicle• Extend the current control design and controllability
results to the refined model• Generalize the obtained control design and
controllability results to a wider group of systems• Validate a simplified version of the control laws on the
water tunnel testbed
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
ReferencesG.J. Balas, J. Bokor, B. Vanek and R.E.A. ArndtControl of Uncertain Systems: Modelling,Approximation and Design.Control of High-Speed Underwater VehiclesSpringer-Verlag, 2006.
B. Vanek, J. Bokor, G.J. Balas and R.E.A. ArndtLongitudinal Motion Control of a High-SpeedSupercavitation VehicleJournal of Vibration and Control, 2006.
B. Vanek, J. Bokor and G.J. BalasTheoretical aspects of High-Speed SupercavitationVehicle ControlAmerican Control Conference, Minneapolis,2006.
B. Vanek, J. Bokor and G.J. BalasHigh-Speed Supercavitation Vehicle ControlAIAA Guidance,Navigation, and Control Conference,Keystone,2006.
Oral Prelim
MotivationSupercavitation
High-SpeedSupercavitatingVehicle
Overall Objectives
Previous Work
FutureResearchResearch Direction
LPV Modeling
Simulation andImplementation
Summary
Time for questions
Thank You!





























