Embed Size (px)
Citation preview
UNIVERZA V LJUBLJANI FAKULTETA ZA ŠPORT
Učbenik za študente Fakultete za šport – Biomehanika 1
Biomehanika 1
Matej Supej
Ljubljana, 2011
2
M. Supej
Biomehanika 1 - učbenik za študente Fakultete za šport
Univerzitetni učbenik z recenzijo
CIP - Kataložni zapis o publikaciji Narodna in univerzitetna knjižnica, Ljubljana 612.76(075.8)(0.034.2) SUPEJ, Matej Biomehanika 1 [Elektronski vir] : učbenik za študente Fakultete za šport / Matej Supej ; likovni material Matej Supej, Ivan Čuk, Stanko Štuhec. - Ljubljana : Fakulteta za šport, Inštitut za šport, 2011 Način dostopa (URL): http://www.fsp.uni-lj.si/COBISS/monografije/SupejBiomehanika1.pdf ISBN 978-961-6843-15-7 255715072

3
Po sklepu dekana je delo Biomehanika 1 - učbenik za študente Fakultete za šport
avtorja M. Supeja, prvi učbenik za študente Fakultete za šport za predmet
Biomehanika 1.
Vse pravice so pridržane. Ponatis (grafični, elektronski ali mehanski, vključno s
fotokopiranje, snemanjem ali prenosom v baze podatkov) celotne ali posameznih
delov je dovoljen le s pisnim soglasjem nosilcev avtorskih pravic.
4
Posvetilo
Knjigo posvečam svoji mali princeski Uli in se ji opravičujem za vse zamujene ure ob
njenem nastajanju. Vse to ne bi bilo mogoče, če moja draga Tina ne bi prevzela
vloge mamice in očija hkrati.
Zahvalil bi se svojim staršem, ki so mi stali ob strani pri izbiri študija fizike in me
podpirali pri moji športni poti.
5
Predgovor
Šport v širšem smislu niso le »gladiatorska« tekmovanja, kjer se vrhunski športniki
bojujejo za stotinke in milimetre, ampak je to tudi zdrav in aktiven način življenja.
Šport izboljšuje kakovost življenja in omogoča zdravo interesno druženje ljudi. Tako
na ravni vrhunskega kot tudi rekreativnega športa sta izjemno pomembna njegovo
proučevanje in razumevanje, saj lahko le tako zagotovimo na eni strani vrhunske
rezultate in na drugi zdravo udejstvovanje s športom.
Izkaže se, da je ravno razumevanje naravnih zakonitosti gibanja eno temeljnih
področij razumevanja športa. Povezanost športnika z okoljem v športnih strokah
večkrat spregledajo, kar vodi v mnogo zmotnih interpretacij dogajanj, ki smo jim
priča, še posebno takrat, kadar prihaja do večjih sprememb. Te so navadno
povezane s tehnološkim napredkom, ki ga brez razumevanja težko optimalno
uporabimo. Če se spomnimo bližnje zgodovine alpskega smučanja, je bilo kar nekaj
takšnih primerov. Začnimo z izjemnimi rezultati norveškega smučarja v
devetdesetih letih prejšnjega stoletja, ki je brezkompromisno zmagoval na
tekmovanjih v veleslalomu. Ker je tekmoval s precej razklenjenimi smučmi, je
mnogo trenerjev menilo, da je to razlog za njegov uspeh, zato so začeli smučarje
množično učiti razklenjene drži smuči. Na smučarsko žalost pa je bila glavna
prednost Norvežana uporaba smuči z bolj poudarjenim stranskim lokom, kot so ga
imeli sotekmovalci. Torej rezultati niso imeli neposredne povezave z razklenjeno
držo smuči. Še več, niti tekmovalni servisi proizvajalcev smuči niti vrhunski
tekmovalci niso verjeli v pohod »karvinga« v tekmovalno smučanje, vse dokler
mlajši tekmovalci z rekreativnimi smučmi, kupljenimi v običajnih trgovinah, niso
začeli hitreje smučati od svojih starejših in sicer boljših kolegov na klasičnih
smučeh. Šele takrat so se tekmovalna industrija in vrhunski tekmovalci skupaj s
trenerji zbudili iz zgodovine klasičnih smuči.
Naslednji korak, ki je na žalost negativno zaznamoval tudi slovensko tekmovalno
smučanje, pa je prilagoditev smučarske tehnike novim smučem. Izkazalo se je, da te
zavijajo po popolnoma drugačnem fizikalnem načelu. To je pravzaprav ključna
sprememba pri povezavi smučarja z okolico, saj se spremeni mehanika zavijanja.
Ker se izkoriščajo drugačna mehanska načela pri zareznem smučanju glede na
klasično tehniko z oddrsavanjem, se mora z načeli zavijanja spremeniti tudi
6
smučarska tehnika. Ta mora optimalno izkoriščati nove mehanske pogoje. Ob tem
se seveda nismo vprašali, kako so se s prihodom novih smuči spremenile varnost
smučanja in z njo ustreznost prog za različne kategorije smučarjev, metodika
poučevanja itd., saj je vse to neposredno vezano na spremembe biomehanike
smučanja.
Podobno kot v alpskem smučanju se tehnološki napredek dogaja tudi v drugih
športnih panogah, saj so vse tehnološko postale podobne formuli 1, zato lahko v
prihodnje pričakujemo vse več tehnoloških sprememb in prilagoditev gibalnih verig,
ki jih izkoriščajo bolje in na bolj zdravi način. Tako pridemo do pomena
biomehanike v športu in njenega osnovnega poslanstva, ko nam priskrbi odgovore
na vprašanja zakaj.
Z eno besedo, biomehanika je razumevanje.
Matej Supej
Ljubljana, Slovenija, 2011
7
Kazalo
Predgovor ............................................................................................................... 5
1. Uvod ............................................................................................................. 10
1.1 Kineziologija in kineziološka znanost ...................................................... 10
1.2 Biomehanika.......................................................................................... 10
1.3 Povratna informacija iz stališča biomehanike ......................................... 10
1.4 Koncept razmišljanja »eno raven nižje« ................................................. 11
1.5 Obseg učbenika ..................................................................................... 12
2. Kinematika .................................................................................................... 13
2.1 Opazovani sistem ....................................................................................... 14
2.2 Translatorno gibanje .............................................................................. 16
2.2.1 Premočrtno gibanje .............................................................................. 20
Enakomerno gibanje.................................................................................. 20
Enakomerno pospešeno gibanje ................................................................ 21
2.2.2 Ravninsko gibanje ................................................................................. 22
Poševni met .............................................................................................. 23
Kroženje .................................................................................................... 30
3. Dinamika ....................................................................................................... 39
3.1 Osnovni zakoni gibanja .......................................................................... 40
1. Newtonov zakon .................................................................................... 40
2. Newtonov zakon .................................................................................... 40
3. Newtonov zakon .................................................................................... 40
3.2 Sile ........................................................................................................ 41
3.2.1 Sila teže ......................................................................................... 41
3.2.2 Sila podlage ................................................................................... 43
Normalna sila ............................................................................................ 43
Sila trenja .................................................................................................. 44
3.2.3 Sila prožnosti ................................................................................. 46
8
3.2.4 Sila upora ....................................................................................... 48
3.2.5 Dinamični vzgon ............................................................................. 51
3.2.6 Magnusov efekt ............................................................................. 51
3.2.7 Hidrostatični vzgon ........................................................................ 52
3.2.8 Sile pri kroženju ............................................................................. 53
3.3 Sunek sile in gibalna količina .................................................................. 61
3.4 Trki teles ................................................................................................ 62
3.5 Sistem masnih točk in togo telo ............................................................. 70
3.6 Težišče sistema masnih točk in težišče togega telesa ............................. 72
3.7 Navor in vztrajnostni moment točkastega telesa.................................... 75
3.8 Vrtenje togega telesa okoli nepremične osi............................................ 78
3.9 Steinerjev izrek ...................................................................................... 80
3.10 Sunek navora in vrtilna količina ............................................................. 82
3.11 Mehansko delo in energija ..................................................................... 90
3.11.1 Potencialna energija ........................................................................... 91
3.11.2 Kinetična energija pri translatornem gibanju ...................................... 91
3.11.3 Kinetična energija pri kroženju točkastega telesa ................................ 94
3.11.4 Kinetična energija rotirajočega telesa ................................................. 95
3.11.5 Prožnostna energija ............................................................................ 96
3.11.6 Izrek o ohranitvi mehanske energije ................................................... 97
3.12 Mehanska moč .................................................................................... 102
Viri ...................................................................................................................... 105
Recenzije ............................................................................................................ 106
doc. dr. Bojan Nemec .................................................................................. 106
doc. dr. Nejc Šarabon .................................................................................. 108
O avtorju ............................................................................................................ 110

9
10
1. Uvod
1.1 Kineziologijainkineziološkaznanost
Kineziologija je vedenje o gibanju ljudi. Včasih se imenuje tudi kinetika ljudi. Beseda
izvira iz grških pojmov »kinesis« (gibanje) in »kinein« (pomakniti). Kineziološka
znanost obravnava fiziološke, mehanske in psihološke mehanizme, ki so povezani z
gibanjem ljudi. Znanstveniki, ki delujejo na področju kineziologije, se primarno
opirajo na biomehaniko, anatomijo, fiziologijo, psihologijo in nevrologijo.
1.2 Biomehanika
Biomehanika je po definiciji znanost, ki raziskuje in se ukvarja z mehaniko živih
organizmov. Kot taka je interdisciplinarna ter združuje mehaniko in biologijo. Kljub
temu, da se je biomehanika zgodovinsko ukvarjala predvsem z osnovnimi
zakonitostmi gibanja, kot so težišče telesa, pomen krčenja mišic za gibanje
segmentov, aerodinamike letenja ptic in insektov, hidrodinamike plavanja rib, je
danes to področje bistveno širše. Poleg funkcionalnega razumevanja makro gibanja
človeka in živali zajema biomehanika tudi mehanske lastnosti in funkcijo tkiv ter
celic, mehanske lastnosti in obnašanje organov, npr. dihal, slušnega aparata, krvnih
obtočil.
1.3 Povratnainformacijaizstališčabiomehanike
Običajno delo strokovnjaka v športu, ki želi športniku postreči s povratno
informacijo, je razdeljeno na več stopenj. Prva je opazovanje izvedbe, za kar
strokovnjak uporablja čutila, predvsem oči, večkrat pa tudi ušesa. Nato sledi
procesiranje, ki ga opravijo možgani glede na svoje izkušnje in znanja. Rezultat je
kvalitativne narave in je zelo omejen z informacijo, ki jo lahko poda svojemu
tečajniku, varovancu ali tekmovalcu. S pomočjo tehnologije in biomehanike je
mogoče povratno informacijo izboljšati. Namesto človeških čutil, ki so razmeroma
omejena, lahko uporabimo merilno tehnologijo, ki gibanje športnika kvantizira z
objektivnimi izmerki. Danes je pestrost senzorjev in merilnih inštrumentov skoraj
11
neomejena. V nadaljevanju lahko fazo procesiranja opravimo v računalniku, če ima
primerno predpisano nalogo: izračune in obdelave podatkov. Sledi naslednja faza
procesiranja oziroma analiza podatkov, ki temelji na razumevanju izmerjenih in
izračunanih parametrov, torej na temeljih, ki zelo pogosto zajemajo biomehaniko.
Po potrebi lahko uporabimo tudi ustrezno statistično obdelavo, ki lahko izmerjene
parametre dodatno obogati z informacijo. Tako je sklenjen krog, ki v nasprotju s
kvalitativno sliko opazovanja postreže s kvantitativnimi rezultati, slonečimi na
naravnih zakonitostih. Prednost takega dela sta seveda objektivnost in
primerljivost, ki navadno postrežeta s kakovostnejšo informacijo ter posledično
izboljšujeta uspešnost dela.
1.4 Konceptrazmišljanja»enoravennižje«
Če želimo uporabiti tehnologijo in izkoristiti prednosti objektivne informacije, je
nujno potrebno razumeti biomehanska načela. Še več, več kot želimo razumeti in
kakovostnejšo informacijo želimo posredovati, globlje moramo poznati zakonitosti.
Za primer: če opazujemo dva smučarja na progi na istem mestu, se navadno najprej
vprašamo po hitrosti, če nas zanima primerjava kakovosti smučanja. Prva
ugotovitev bi bila, da je tisti, ki je hitrejši v danem trenutku, boljši tudi v tem
trenutku. Žal je ta ugotovitev površna in pogosto tudi napačna. Vprašati se moramo
po pospešku, torej eno raven nižje. Zakaj? Morda tisti, ki v danem trenutku smuča
počasneje, hkrati močno pospešuje, drugi pa zavira. Kdo pa je v tem primeru
»boljši«? Ko se začnemo spraševati po pospeških, pridemo še eno raven nižje – do
sile. Sile so po 2. Newtonovem zakonu neposredno povezane s pospeškom. Sili, ki
povzročata zaviranje, sta sili trenja in upora. Ko se začnemo ukvarjati z uporom, nas
začne zanimati obtekanje zraka, torej tokovnice in vrtinčenje molekul zraka – zopet
raven nižje. Ravno tako je pri sili trenja. Začnemo se zanimati za lastnosti snega in
drsne obloge – oboje hitro konča še eno raven nižje – molekulska slika. Do
podobnih ugotovitev bi prišli tudi, če začnemo razglabljati o tehniki smučanja in
prodirati v notranjost človeka, mišičnih sil, lastnosti mišic, celic itd. Ugotovimo
lahko, da če želimo na neki ravni mehanskega sveta razumeti dogajanje, moramo
vedno poznati tudi to, kaj se dogaja na eni ravni nižje. To lahko imenujemo koncept
razmišljanja »eno raven nižje«.

12
1.5 Obsegučbenika
Učbenik Biomehanika 1 je namenjen razumevanju osnovnih načel biomehanskega
modeliranja športnika v povezavi z okolico in športnimi rekviziti. Bralca popelje
skozi osnove klasične mehanike in njen prenos na šport. Ker je biomehanika del
fizike, od bralca pričakujemo razumevanje osnovnih konceptov matematike.

13
2. Kinematika
Biomehanika se začne z opazovanjem gibanja. Področje opazovanja gibanja, kjer se
ne menimo za vzroke gibanja, se imenuje kinematika. Kinematika sodi v fizikalno
področje mehanike.
Splošno se opazovani prostor v fiziki razteza od izjemno majhnih delcev, ki
sestavljajo npr. protone atomov, pa vse do galaksij. Ne glede na to, kaj opazujemo,
moramo v vsakem primeru vpeljati osnovne enote merjenja. Za dolžino vpeljemo
meter (m), za enoto časa sekundo (s) in za enoto mase kilogram (kg). Enote dolžine,
časa in mase imenujemo osnovne zato, ker so vse druge enote (hitrost, pospešek,
sila, energija …), ki jih sicer uporabljamo v mehaniki, izpeljane iz teh osnovnih enot.
Dnevno uporabljamo tudi neosnovne enote časa (minute, ure, tedne …), dolžine
(milimetre, centimetre, kilometre …) in mase (grame, dekagrame, tone …), ki so v
ustreznih velikostnih razredih, da sta predstava in obravnava lažji.
14
2.1Opazovanisistem
Gibanje v makroskopskem svetu navadno opišemo v tridimenzionalnem
vektorskem prostoru, kjer vsaka od koordinat predstavlja eno od smeri gibanja,
npr. naprej-nazaj, levo-desno in gor-dol. Ob definiranju prostora je pomembna tudi
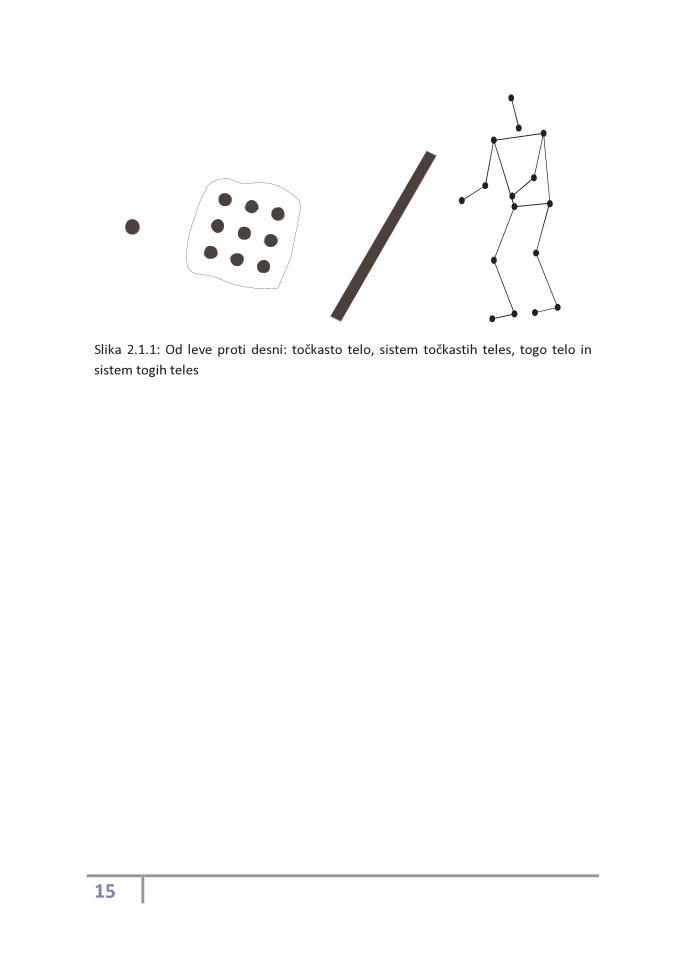
definicija opazovanega sistema. Najenostavnejša oblika opazovanega sistema je
točkasto telo (slika 2.1.1). To je telo, ki ima vso svojo maso zbrano v eni točki in
nima dimenzije, torej je njegova velikost neskončno majhna oziroma enaka nič. Ena
od pomembnih posledic je, da točkastega telesa ne moremo vrteti okoli lastne osi.
V nekaterih primerih opazovani sistem obravnavajo tudi kot sistem točkastih teles
(slika 2.1.1), kjer se vsaka točka zase obnaša kot točkasto telo.
Mehansko gledano je od točkastega kompleksnejše togo telo (slika 2.1.1). Kadar
opazovani sistem obravnavamo kot togo telo, imamo s tem v mislih, da se naš
opazovani sistem ne pregiba oz. ne spreminja svoje oblike. Njegova masa pa je
porazdeljena po vsem volumnu telesa. Togo telo je lahko homogeno, takrat je
njegova gostota po vsem volumnu enaka, lahko pa je tudi nehomogeno, kadar je
gostota po volumnu telesa neenakomerna. Za področje biomehanike je večkrat
zanimiv tudi sistem togih teles (slika 2.1.1), ki ga sestavlja več med seboj povezanih
togih teles.
Za lažjo predstavo lahko nekega športnika v najenostavnejši obliki obravnavamo kot
točkasto telo. To je navadno kar njegovo težišče telesa (več o tem v poglavju 3.6). V
tem primeru se predvsem zanimamo, kako se športnik kot celota giblje v prostoru.
Če ima v roki še kakšen športni rekvizit, lahko opazovani sistem obravnavamo tudi
kot sistem dveh masnih točk, če nas na primer ločeno zanima, kako se giblje
športnik in kako njegov lopar. Kadar pa nas zanima še njegov nagib pri spremembi
smeri ali vrtenje okoli lastne osi, moramo športnika obravnavati »najmanj« kot
togo telo. Če želimo izvedeti več o njegovih kotih v kolenskem, kolčnem in
komolčnem sklepu, pa ga moramo obravnavati kot sistem togih teles.
15
Slika 2.1.1: Od leve proti desni: točkasto telo, sistem točkastih teles, togo telo in
sistem togih teles

16
2.2 Translatornogibanje
Najprej se bomo posvetili translatornemu gibanju, pri katerem se vse točke telesa
gibljejo enako. V tem primeru je dovolj, če telo obravnavamo kot točkasto. Njegovo
lego lahko v vsakem trenutku zapišemo s krajevnim vektorjem:
),,( zyxr =r
.
Ker se v splošnem telo s časom t premika, je krajevni vektor odvisen od časa
oziroma se vsaka od njegovih koordinat s časom spreminja:
( ) ( ) ( )( )tztytxtr ,,)( =r
.
V kratkem času dt se točka premakne za:
( ) )(trdttrrdrrr −+= .
Matematično gledano: če je dt dovolj kratek, se točka v času dt premakne v smeri
tangente na krivuljo. V tem primeru lahko kvocient med rdr
in dt definiramo kot
hitrost gibanja:
( ) ( ) ( ) ( )zyx vvvdt
tdz
dt
tdy
dt
tdx
dt
rdv ,,,, =
==r
r
. (2.1)
Hitrost je fizikalna količina, ki nam pove, koliko se telo premakne na časovno enoto,
in ima enoto [m/s]. Po definiciji ima hitrost smer in velikost, matematično jo
zapišemo kot vektor. Kadar nas zanima samo njena velikost, lahko izračunamo
dolžino vektorja hitrosti oziroma njegovo absolutno vrednost:
222zyx vvvvv ++== r
. (2.2)
Tudi hitrost se lahko s časom spreminja, zato je tudi hitrost funkcija časa:
( ) ( ) ( ) ( )( )tvtvtvtv zyx ,,=r
.
Podobno, kot smo definirali hitrost, ki opisuje spremembo položaja, lahko
definiramo tudi pospešek, ki opisuje spremembo hitrosti:
( ) )(tvdttvvdrrr −+=
17
ter zapišemo pospešek kot količnik spremembe hitrosti in časa, v katerem se
sprememba zgodi:
( ) ( ) ( ) ( )zyxzyx aaa
dt
tdv
dt
tdv
dt
tdv
dt
vda ,,,, =
==
r
r
. (2.3)
Enota za pospešek je [m/s2]. Če je hitrost odvod poti po času oz. krajevnega
vektorja po času, potem je pospešek drugi odvod poti po času:
2
2
dt
rd
dt
vda
rr
r == .
Kadar imamo opravka z enakomerno pospešenim gibanjem, je pospešek
konstanten, kadar pa imamo opravka z neenakomerno pospešenim gibanjem, je
tudi pospešek odvisen od časa:
( ) ( ) ( ) ( )( )tatatata zyx ,,=r
.
Najprej smo zapisali osnovni definiciji za hitrost in pospešek, ki ju lahko izračunamo
iz krajevnega vektorja oz. iz vektorja hitrosti. Velikokrat pa se sprašujemo tudi o
nasprotni poti, kako bi npr. iz hitrosti izračunali pot oz. spremembo položaja. To
dobimo tako, da v vsakem trenutku pogledamo hitrost gibanja in jo pomnožimo s
časom dt :
( )dttvrdrr = .
Vsota vseh majhnih sprememb je:
( )dttvrd ∫∫ = rr
oziroma je sprememba položaja:
( )dttvrrr ∫=−=∆ rrrr
12 .
Velikokrat začetni položaj poznamo, takrat je končni položaj:
( )dttvrrt
t∫+=2
1
12
rrr
, (2.4)
18
kjer sta 1t in 2t čas na začetku in čas na koncu ter 1rr
položaj na začetku (ob času 1t )
ter 2rr
položaj na koncu (ob času 2t ). S podobnim razmislekom pridemo tudi do
spoznanja, da je končna hitrost:
( )dttavvt
t∫+=2
1
12
rrr
. (2.5)
Razumevanje matematičnega ozadja osnovnih definicij, kot smo jih zapisali v
enačbah od 2.1 do 2.5, je izjemnega pomena za razumevanje diagramov. Vedno
imamo lahko v mislih, da časovni odvod predstavlja smerni količnik tangente na
krivuljo ob določenem času. Tako npr. zelo preprosto iz diagrama poti v odvisnosti
od časa razberemo hitrost. Preprosto povedano: kadar je krivulja naraščajoča, je
tudi hitrost pozitivna in obrnjeno. Kadar krivulja hitreje narašča, je tudi hitrost višja
in obrnjeno. Kadar imamo npr. maksimum ali minimum, je hitrost enaka nič.
Podobno si lahko pri branju diagramov pomagamo tudi z geometrijsko predstavo
integrala. Integral predstavlja ploščino pod krivuljo, ki jo lahko razdelimo na
enakomerno široke in tanke stolpce ter opazujemo, kako veliko ploščino imajo
(kako visoki so). Kadar je vrednost funkcije, npr. hitrosti, bolj oddaljena od abscisne
osi (stolpci so višji), pot hitreje narašča (pozitivna funkcija) oz. hitreje pada
(negativna funkcija) in obrnjeno.
Mnogokrat nas pri gibanju zanima tudi povprečje, npr. povprečna hitrost ali
povprečni pospešek. Po definiciji lahko povprečno hitrost zapišemo kot količnik
med opravljeno potjo ( ( )dttvrrr ∫=−=∆ rrrr
12 ) v določenem časovnem intervalu in
časovnem intervalu, v katerem je bila pot opravljena:
( )
12
12
12
2
1
tt
rr
tt
dttv
v
t
t
−−=
−=∫ rr
r
r
. (2.6)
Opazimo, da je povprečna hitrost na določenem časovnem intervalu odvisna le od
začetnega in končnega položaja. Posledica tega je, da ima atlet, ki preteče cel krog
na krožni atletski stezi, povprečno hitrost enako nič, saj je na začetku in na koncu
teka na istem mestu. To se morda zdi na prvi pogled presenetljivo, razlaga pa je
zelo preprosta. Atlet na različnih delih steze teče v različno smer, hitrost pa je
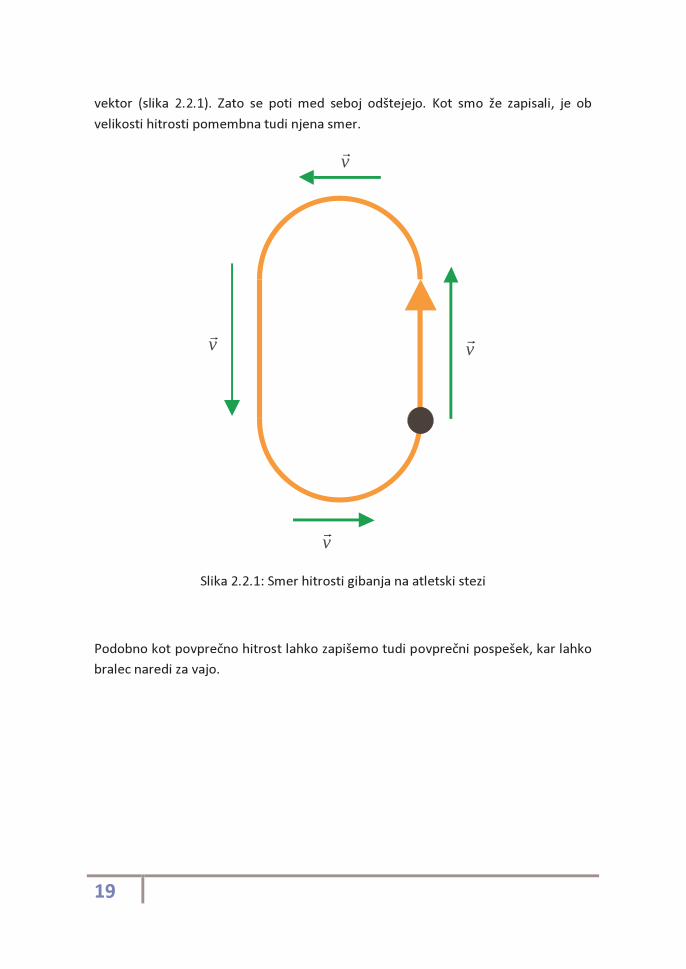
19
vektor (slika 2.2.1). Zato se poti med seboj odštejejo. Kot smo že zapisali, je ob
velikosti hitrosti pomembna tudi njena smer.
vr
vr
vr
vr
Slika 2.2.1: Smer hitrosti gibanja na atletski stezi
Podobno kot povprečno hitrost lahko zapišemo tudi povprečni pospešek, kar lahko
bralec naredi za vajo.

20
2.2.1 Premočrtno gibanje
Zapisane enačbe v poglavju 2.2 veljajo splošno. Kadar imamo opravka z gibanjem v
eni smeri, torej z enodimenzionalnim gibanjem, enačbe dobijo enodimenzionalno
obliko. Kadar sistem zasukamo tako, da os x kaže v smeri gibanja, osnovni definiciji
za hitrost in pospešek zapišemo takole:
( ) ( )
( ) ( )0,0,0,0,
0,0,0,0,
xx
xx
adt
tdv
dt
vda
vdt
tdr
dt
rdv
=
==
=
==
r
r
r
r
.
Pri premočrtnem gibanju pogosteje opustimo vektorsko obliko in enačbe gibanja
zapišemo v skalarni obliki:
( )
( )dttavv
dttvss
dt
sd
dt
dva
dt
dsv
t
t
t
t
∫
∫
+=
+=
==
=
2
1
2
1
12
12
2
2
, (2.7)
kjer smo zaradi pogostejše rabe krajevni vektor rr
nadomestili s potjo s .
Enakomerno gibanje
Najenostavnejša oblika gibanja v prostoru je enakomerno gibanje. Zanj je značilno,
da se telo giblje nepospešeno, hitrost pa je konstantna. Čeprav je enakomerno
gibanje v prostoru, se bomo omejili na premočrtno gibanje. V tem primeru enačbe
2.7 zapišemo takole:

21
( )12
12112
0
.
vv
ttvss
a
konstv
=−+=
==
. (2.8)
Enakomerno pospešeno gibanje
Kadar se telo giblje s konstantnim pospeškom, gre za enakomerno pospešeno
gibanje. V tem primeru se hitrost enakomerno spreminja. Enačbe 2.7 za
premočrtno enakomerno pospešeno gibanje zapišemo takole:
( ) ( )
( )1212
212
12112 2
.
ttavv
ttattvss
konstadt
dsv
−+=
−+−+=
=
=
. (2.9)
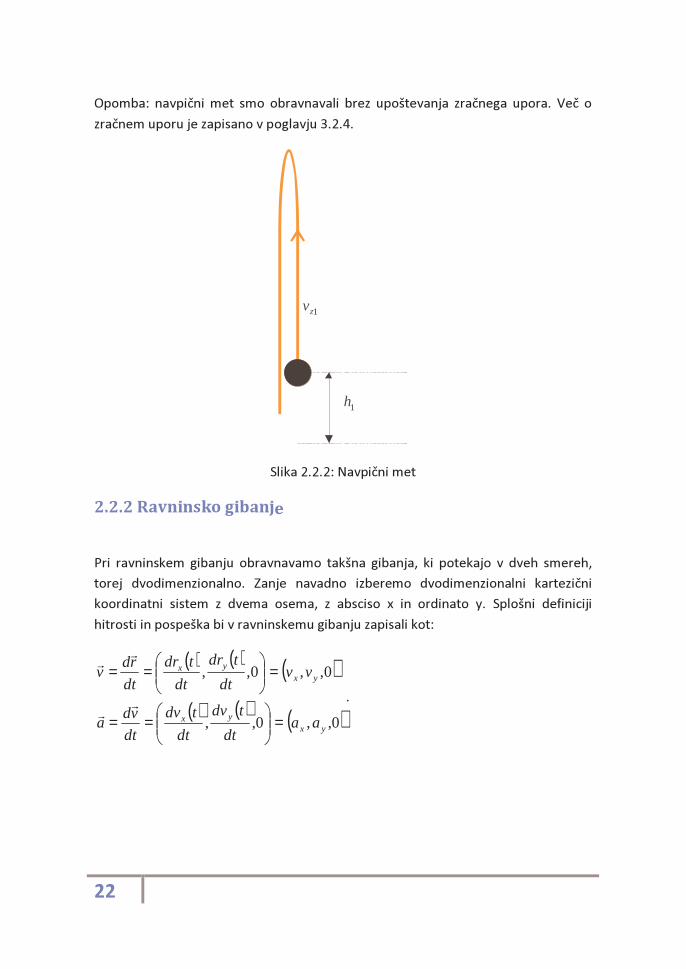
Primer enakomerno pospešenega gibanja je navpični met. Pospešek nadomestimo
z gravitacijskim pospeškom g , pot z višino h , hitrost pa z vertikalno hitrostjo zv (
slika 2.2.2). Če je čas ob izmetu enak 0, začetna vertikalna hitrost pa enaka 1zv ,
potem naslednje enačbe opišejo predpostavljeno gibanje:
gtvv
gttvhh
smga
zz
z
−=
−+=
−=−=
12
2
112
2
2
/81.9
, (2.10)
kjer t predstavlja pretečeni čas od začetka izmeta. Negativni predznak
gravitacijskega pospeška označuje njegovo smer, ki kaže proti središču Zemlje.
Navadno sprejmemo, da je pozitivna smer navzgor (iz središča zemlje navzven).
22
Opomba: navpični met smo obravnavali brez upoštevanja zračnega upora. Več o
zračnem uporu je zapisano v poglavju 3.2.4.
1zv
1h
Slika 2.2.2: Navpični met
2.2.2 Ravninsko gibanje
Pri ravninskem gibanju obravnavamo takšna gibanja, ki potekajo v dveh smereh,
torej dvodimenzionalno. Zanje navadno izberemo dvodimenzionalni kartezični
koordinatni sistem z dvema osema, z absciso x in ordinato y. Splošni definiciji
hitrosti in pospeška bi v ravninskemu gibanju zapisali kot:
( ) ( ) ( )
( ) ( ) ( )0,,0,,
0,,0,,
yxyx
yxyx
aadt
tdv
dt
tdv
dt
vda
vvdt
tdr
dt
tdr
dt
rdv
=
==
=
==
r
r
r
r
.
23
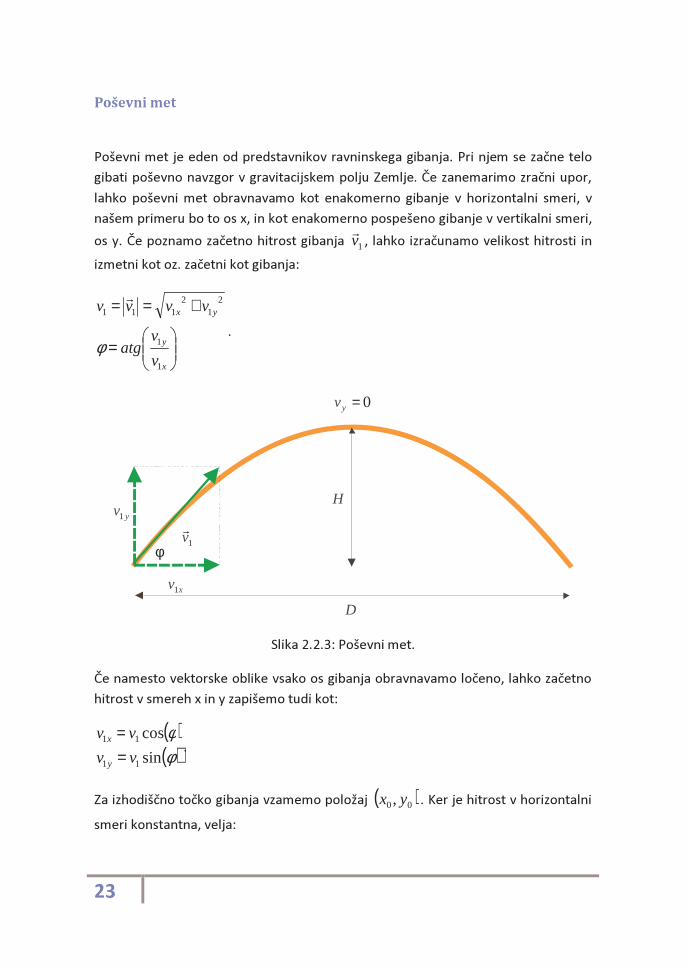
Poševni met
Poševni met je eden od predstavnikov ravninskega gibanja. Pri njem se začne telo
gibati poševno navzgor v gravitacijskem polju Zemlje. Če zanemarimo zračni upor,
lahko poševni met obravnavamo kot enakomerno gibanje v horizontalni smeri, v
našem primeru bo to os x, in kot enakomerno pospešeno gibanje v vertikalni smeri,
os y. Če poznamo začetno hitrost gibanja 1vr
, lahko izračunamo velikost hitrosti in
izmetni kot oz. začetni kot gibanja:
=
+==
x
y
yx
v
vatg
vvvv
1
1
21
2111
φ
r
.
1vr
xv1
yv1
φ
D
H
0=yv
Slika 2.2.3: Poševni met.
Če namesto vektorske oblike vsako os gibanja obravnavamo ločeno, lahko začetno
hitrost v smereh x in y zapišemo tudi kot:
( )( )φφ
sin
cos
11
11
vv
vv
y
x
==
.
Za izhodiščno točko gibanja vzamemo položaj ( )00, yx . Ker je hitrost v horizontalni
smeri konstantna, velja:

24
( )tvxx
konstvvv
x
xx
10
11 .cos
+==== φ
,
če je čas ob začetku poševnega meta enak 0, x pa predstavlja pot v horizontalni
smeri. Gibanje v smeri y pa je skladno z navpičnim metom (enačbe 2.10), le da
zaradi boljše preglednosti z y označimo gibanje v vertikalni smeri:
gtvv
gttvyy
smg
yy
y
−=
−+=
=
1
2
10
2
2
/81.9
.
Enačbi:
2
2
10
10
gttvyy
tvxx
y
x
−+=
+= (2.11)
predstavljata parametrično obliko tirnice gibanja. Če sprejmemo, da se je izmet
zgodil v izhodišču koordinatnega sistema ( ) ( )0,0, 00 =yx , in iz prve enačbe 2.11.
izpostavimo ( )φcos11 vxvxt x == ter vstavimo v drugo enačbo (2.11), dobimo:
( ) ( ) ( )φφ
220
2
cos2v
gxtgxxy −⋅= . (2.12)
To je enačba parabole. Ugotovimo lahko, da se pri poševnem metu, kadar ne
upoštevamo zračnega upora, telo giblje po paraboli. Ob tem je hitrost v vsakem
trenutku tangencialna na tirnico leta.
Domet pri poševnem metu, kadar je podlaga ravna, lahko izračunamo na dva
načina. Pri prvem uporabimo enačbo parabole (2.12) in poiščemo, kdaj ima enačba
ničle:
( ) ( ) ( ) 0cos2 22
0
2
=−⋅=φ
φv
gDtgDDy .
Dobimo dve rešitvi. Prva je:
25
0=D ,
druga pa po preoblikovanju:
( )g
vD
φ2sin20= . (2.13)
Rešitvi lahko bralec izpelje sam.
Druga možnost izračunavanja dometa je s pomočjo računanja časa leta in dveh
predpostavk, ki ju dobimo z opazovanjem. Prva predpostavka je, da je vertikalna
hitrost na vrhu parabole enaka 0:
0)( 2/112/1 =−= gtvtv yy .
Iz tega lahko izračunamo, koliko časa potuje telo do najvišje lege:
g
vt y1
2/1 = . (2.14)
Druga predpostavka je, da telo potuje navzgor enako dolgo kot navzdol, tirnica je
simetrična. Torej je čas leta:
g
vtt y1
2/1 22 == . (2.15)
Če čas leta (enačba 2.15) vstavimo v enačbo 2.11 za pot, dobimo:
xvtD 12/12= .
Z uporabo izrekov o kotnih funkcijah dobimo enako enačbo za domet (2.13):
( )g
vD
φ2sin20= .
Tudi najvišjo lego (maksimalno višino) gibanja telesa pri poševnem metu lahko
dobimo na dva načina. Prvi je, da poiščemo maksimum parabole leta oziroma
maksimum enačbe 2.12, ki ga poiščemo z odvodom funkcije:

26
( )
( ) ( )0
cos2
0
220
2
=
−⋅
=
dx
v
gxtgxd
dx
xdy
φφ
.
Po kratkem računu bi dobili rešitev, ki je enaka kot po drugi, matematično
enostavnejši poti. V tem primeru ravnamo podobno kot pri iskanju dometa.
Poiščemo čas, ki ga potrebuje telo do najvišje lege (enačba 2.14) in ga vstavimo v
enačbo za višino (2.11) ob predpostavki, da je izhodišče koordinatnega sistema v
začetni točki leta 00 =y :
( )2
111
22/1
2/112/1 22
−=−==
g
vg
g
vv
gttvtyH yy
yy .
Z uporabo izrekov o kotnih funkcijah dobimo, da je najvišja lega:
( )g
vH
2
sin220 φ= . (2.16)
Optimalni met imamo takrat, kadar ima telo takšen izmetni kot oziroma kot
začetne hitrosti φ pri poševnem metu, da bo pri enaki začetni hitrosti letelo
najdlje, domet bo takrat največji. V tem primeru iščemo optimizacijo enačbe
xvtD 12/12= . Če je kot φ velik, bo čas leta dolg, vendar bo horizontalna hitrost
majhna in s tem tudi domet. Pri majhnih kotih φ bi se zgodilo ravno nasprotno.
Torej iščemo razmerje med horizontalno hitrostjo in časom leta. Matematično
gledano lahko iščemo maksimum enačbe za domet (2.13). To pa že vemo, da je
takrat, ko ima odvod funkcije ničlo:
( )
0
2sin
0
20
=
=
φ
φ
φ
d
gv
d
d
dD
.
Rešitve dobimo po korakih:

27
( )
( )
24
22
02cos
02cos22
0
ππφ
ππφ
φ
φφ
k
k
g
v
d
dD
±=
±=
=
==
.
V našem primeru je edina primerna rešitev:
o454
== πφ . (2.17)
Domet v primeru optimalnega meta poenostavljeno izračunamo kot:
g
vD
20= . (2.18)
V športu nas večkrat zanima poševni met, ko začetna in končna višina nista enaki
(slika 2.2.4). Tak primer je npr. met krogle. Takrat lahko rečemo: 00 ≠y . Tudi v
tem primeru lahko domet izračunamo na dva načina. Tokrat je preprostejši (krajši),
z uporabo enačbe parabole (2.12), kjer iščemo:
( ) hDy ∆−= ,
h pa je razlika med začetno in končno višino:
21 hhh −=∆ .

28
1vr
xv1
φ
D
H
0=yv
21 hhh −=∆
( )0,0 yx
Slika 2.2.4: Poševni met, ko začetna in končna višina nista enaki
Vstavimo pogoj ( ) hDy ∆−= v enačbo 2.12. in dobimo:
( ) ( ) hv
gDtgD ∆−=−⋅
φφ
220
2
cos2.
Rešitev kvadratne enačbe nas pripelje do enačbe za domet:
( )( )
∆++=φ
φ22
0
20
sin
211
22sin
v
hg
g
vD . (2.19)
Enačba ob pogoju 0=∆h preide v znano obliko enačbe za poševni met, ko sta
začetna in končna višina enaki (enačba 2.13).
Najvišjo lego pri poševnem metu, ko začetna in končna višina nista enaki,
izračunamo po enačbi za višino 2.11 s pogojem 2.14. Rezultat je skoraj enak kot pri
poševnem metu, kjer sta začetna in končna višina enaki (enačba 2.16), le da
prištejemo začetno višino:
( )g
vyH
2
sin220
0
φ+= . (2.20)
29
Za določitev optimalnega meta zopet iščemo maksimum funkcije dometa v
odvisnosti od kota ( 0=φd
dD). Razlika je v tem, da je enačba za domet (2.19) tokrat
bolj zapletena. Računanje bomo preskočili in zapisali le rezultat za optimalni kot:
∆+
=
hg
vopt 2
01
1arccos
21φ . (2.21)
Druga, nekoliko lažja, vendar vseeno dovolj zapletena metoda za izračun
optimalnega kota, da presega našo raven je, da vzamemo enačbo parabole 2.12 s
pogojem ( ) hDy ∆−= . Tudi tu velja 0=φd
dx. Po nekaj matematičnih korakih
dobimo rezultata, ki sta enaka enačbi 2.21:
∆+=
hgv
vopt
2arctan
20
0φ (2.22)
in
∆+=
20
12
1arcsin
v
hgoptφ . (2.23)
Čeprav so si enačbe 2.21-2.23 na prvi pogled različne, dobimo enak rezultat.
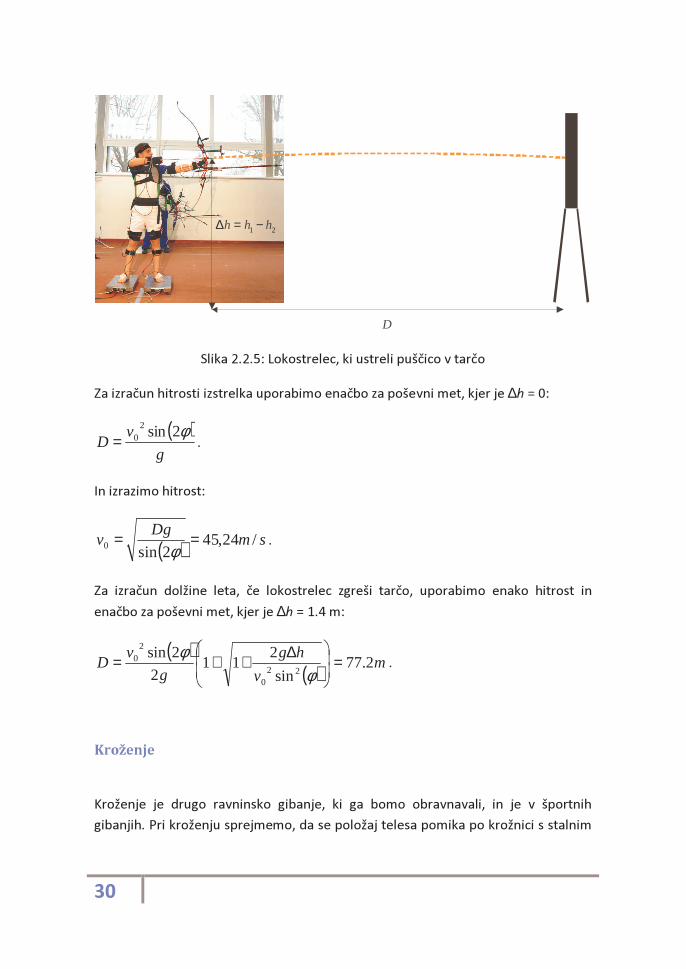
Primer: lokostrelec ustreli puščico v D = 70 m oddaljeno tarčo po kotom φ = 10°.
Izračunaj, s kolikšno hitrostjo mora puščica odleteti v trenutku, ko zapusti lok.
Predpostavi, da je tarča na enaki višini kot puščica v trenutku, ko zapusti lok.
Izračunaj še, kako daleč bi odletela puščica, če bi lokostrelec zgrešil tarčo, višina
puščice v trenutku izstrelitve pa je ∆h = 1.4 m.
30
D
21 hhh −=∆
Slika 2.2.5: Lokostrelec, ki ustreli puščico v tarčo
Za izračun hitrosti izstrelka uporabimo enačbo za poševni met, kjer je ∆h = 0:
( )g
vD
φ2sin20= .
In izrazimo hitrost:
( ) smDg
v /24,452sin0 ==φ
.
Za izračun dolžine leta, če lokostrelec zgreši tarčo, uporabimo enako hitrost in
enačbo za poševni met, kjer je ∆h = 1.4 m:
( )( ) m
v
hg
g
vD 2.77
sin
211
2
2sin22
0
20 =
∆++=φ
φ.
Kroženje
Kroženje je drugo ravninsko gibanje, ki ga bomo obravnavali, in je v športnih
gibanjih. Pri kroženju sprejmemo, da se položaj telesa pomika po krožnici s stalnim
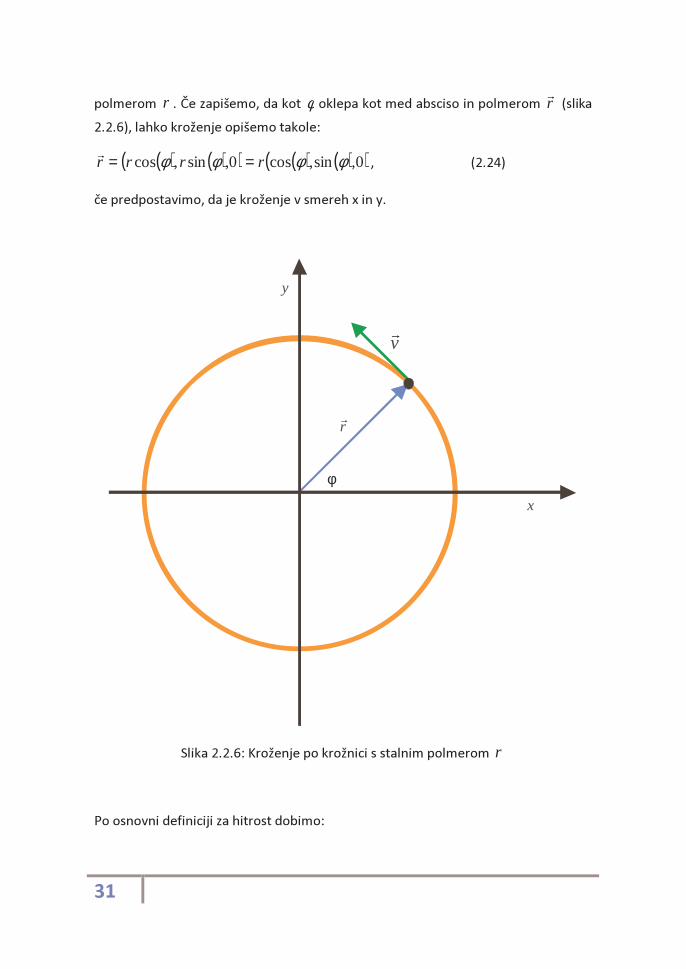
31
polmerom r . Če zapišemo, da kot φ oklepa kot med absciso in polmerom rr
(slika
2.2.6), lahko kroženje opišemo takole:
( ) ( )( ) ( ) ( )( )0,sin,cos0,sin,cos φφφφ rrrr ==r , (2.24)
če predpostavimo, da je kroženje v smereh x in y.
vr
φ
rr
x
y
Slika 2.2.6: Kroženje po krožnici s stalnim polmerom r
Po osnovni definiciji za hitrost dobimo:

32
( ) ( )( )( ) ( )( )0,cos,sin
0,cos,sin
φφφφφφφ
−=
=−==&
&&&rr
r
rrrv, (2.25)
kjer smo s pikicami označili odvod po času. Že od prej vemo, da je hitrost gibanja
tangencialna na tirnico gibanja (krožnica). Hkrati ugotovimo, da je radij vektor,
pravokoten na hitrost, saj velja:
0=⋅ rvrr
. (2.26)
Opomba: skalarni produkt je enak 0, kadar sta vektorja pravokotna. Bralec lahko
sam preveri, da to pri kroženju drži.
Če v enačbo 2.25 namesto časovnega odvoda kota φ& vstavimo kotno hitrost ω
(velja φφω &==dt
d), dobimo:
( ) ( )( )0,cos,sin ttrv ωωω −=r . (2.27)
Ugotovimo tudi, da je absolutna hitrost oziroma velikost hitrosti pri kroženju
neposredno odvisna od kotne hitrosti in polmera kroženja:
ωrv =r
. (2.28)
Med kotno hitrostjo in hitrostjo obstaja pomembna razlika. Če hitrost pove, koliko
poti na časovno enoto opravi telo, potem kotna hitrost pove, za kolikšen kot v
radianih se telo zasuka v časovni enoti. Enota, ki jo ima kotna hitrost, je tako [s-1],
kar nekateri avtorji zapišejo tudi [rad/s].
Opomba: osnovna fizikalna enota za kot je radian in ne stopinja.
Po definiciji (enačba 2.1) izračunamo še pospešek pri kroženju:
( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) rt aarr
rrrvarr
&&&&&r&rr
+=−−+−=
=−−+−===
0,sin,cos0,cos,sin
0,sin,cos0,cos,sin2
2
φφωφφαφφφφφφ
, (2.29)
kjer smo pospešek razdelili na radialno in tangencialno smer (slika 2.2.7). Definirali
smo tudi kotni pospešek:
φωα &&& == (2.30)
33
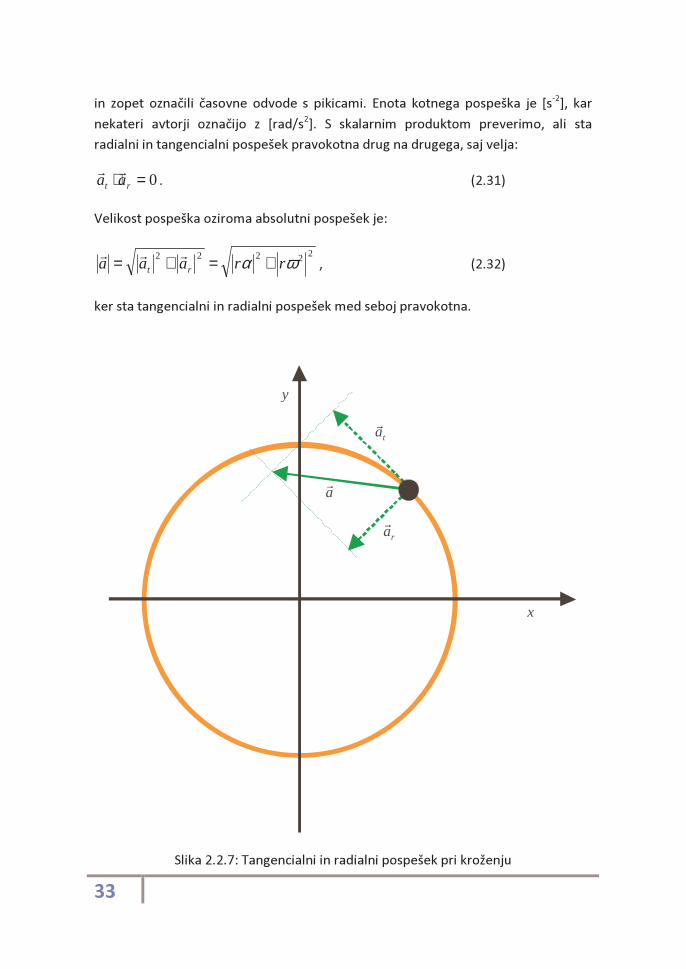
in zopet označili časovne odvode s pikicami. Enota kotnega pospeška je [s-2], kar
nekateri avtorji označijo z [rad/s2]. S skalarnim produktom preverimo, ali sta
radialni in tangencialni pospešek pravokotna drug na drugega, saj velja:
0=⋅ rt aarr
. (2.31)
Velikost pospeška oziroma absolutni pospešek je:
22222 ωα rraaa rt +=+= rrr
, (2.32)
ker sta tangencialni in radialni pospešek med seboj pravokotna.
x
y
rar
tar
ar
Slika 2.2.7: Tangencialni in radialni pospešek pri kroženju
34
Pri kroženju nas pogosto zanima tudi obhodni čas, ki ga definiramo s količnikom
med opravljeno potjo L in hitrostjo kroženja v , iz česar dobimo povezavo s kotno
hitrostjo:
ωππ 22
0 ===v
r
v
Lt . (2.33)
Definirajmo še frekvenco kroženja:
0
1
t=ν (2.34)
ter izpeljimo povezavo med frekvenco kroženja in kotno hitrostjo:
πνπω 22
0
==t
. (2.35)
Enakomerno kroženje
Kadar je tangencialni pospešek enak 0:
0=tar
,
kroženje imenujemo enakomerno. Takrat je tudi kotni pospešek enak nič. Skupni
pospešek je enak radialnemu, kar je pogoj, da telo kroži:
( ) ( )( ) 22 0,sin,cos ωωωω rttraa r
rrr
−=−== . (2.36)
Pospešek pri enakomernem kroženju kaže v nasprotni smeri radija vektorja oz.
neposredno proti središču kroženja. Velikost pospeška pa je enaka:
2ωra =r
. (2.37)
Enakomerno kroženje lahko v polarnih koordinatah opišemo s/z:

35
.
.
0
0
konstr
t
konst
=+=
==
φωφωα
, (2.38)
saj se radij kroženja in kotna hitrost ne spreminjata. Začetni odmik v kotu ob času
0=t smo označili s 0φ .
Enakomerno pospešeno kroženje
Kroženje, pri katerem imamo stalen tangencialni pospešek .konstat =r
in s tem
tudi kotni pospešek .konst=α , imenujemo enakomerno pospešeno, ki ga v
polarnih koordinatah opišemo:
.2
.
0
2
0
konstr
tt
t
konst
=
++=
+==
φωαφ
ωαωα
, (2.39)
saj se radij kroženja ne spreminja. Ob času 0=t smo odmik v kotu označili s 0φ ,
začetno kotno hitrost pa z 0ω . Pospešek pri enakomerno pospešenem kroženju je
vsota tangencialnega in radialnega pospeška:
rt aaarrr
+= ,
velikost pospeška pa znaša:
22222 ωα rraaa rt +=+= rrr
. (2.40)
Po kratkem razmisleku in pregledu zgornjih enačb ugotovimo, da je kroženje
matematično enostavneje opisati v polarnih kot v kartezičnih koordinatah.
Enakomerno kroženje tako zapišemo v polarnem sistemu le z linearnimi enačbami,
kjer se spreminja ena koordinata (enačbe 2.38), medtem ko je v kartezičnem
koordinatnem sistemu za opis potrebno obravnavati zahtevnejše enačbe s
spreminjanjem v dve smereh (v x in y).

36
Mehansko gledano lahko kroženje obravnavamo na enak način kot premočrtno
gibanje, če uporabimo polarne koordinate. Torej pot, hitrost in pospešek ( avs ,, ) v
enačbah zamenjamo s/z ( αωφ ,, ).
Premočrtno gibanje:
( ) ( )∫∫ +=+=
==
dttavvdttvss
dt
dva
dt
dav
00 ,
,
in kroženje:
( ) ( )∫∫ +=+=
==
=
dttdtt
dt
d
dt
d
konstr
αωωωφφ
ωαφω
00 ,
,
.
.
Za primer zapišimo enačbi enakomerno pospešenega gibanja:
0
2
0
2svt
ats
vatv
++=
+=
in nato še enačbe enakomerno pospešenega kroženja:
.2 0
2
0
konstr
tt
t
=
++=
+=
φωαφ
ωαω
.
Če želimo polarne koordinate pretvoriti v kartične, uporabimo zvezi:
( )( )φφ
sin
cos
ry
rx
==
, (2.41)
kadar pa želimo kartične koordinate pretvoriti v polarne, uporabimo zvezi:

37
=
+=
x
yatg
yxr
φ
22
. (2.42)
Primer: Metalec krogle se z mirovanja začne vrteti s kotnim pospeškom α = 2 s-1.
Izračunaj, s kolikšno tangencialno hitrostjo se bo vrtelo kladivo po dveh obratih.
Upoštevaj, da je dolžina roke in kladiva (radij kroženja) r = 2 m.
Slika 2.2.8: Metalec kladiva (fotografija: S. Štuhec)
Najprej moramo izračunati, koliko časa bo metalec kladiva potreboval, da se zasuka
za dva obrata. Uporabimo enačbo za enakomerno pospešeno kroženje:
0
2
2φωαφ ++= t
t,
kjer sta φ0 = 0 in ω = 0, ter izpostavimo čas:
st 54,32 ==αφ
.
Upoštevali smo, da sta dva obrata enaka kotu 4π radianov. Iz tega izračunamo
kotno hitrost:
10 09,7 −==+= stt αωαω
38
in nato tangencialno hitrost:
smrv /18,14== ω .
39
3. Dinamika
V nasprotju s kinematiko dinamika obravnava zakone o gibanju teles pod vplivom
sil oziroma se zanima za vzroke za gibanje in s tem predstavlja glavno vejo
mehanike. To področje biomehanike nam postreže z odgovori na vprašanja zakaj.
V dinamiki je treba najprej definirati silo. To je fizikalna količina, ki nam pove kako
eno telo učinkuje na drugo, in jo označimo s Fr
. Koncept sile je izjemno
pomemben, saj pospešenega gibanja brez delovanja sil ni oziroma lahko za
pospešeno gibanje nekega telesa vedno poiščemo vzrok v drugem telesu, ki
učinkuje na prvo. Pri obravnavanju sil ne smemo spregledati, da ima sila poleg
velikosti tudi smer, zaradi česar jo zapišemo z vektorjem. Kasneje bomo ugotovili,
da je poleg velikosti in smeri pri sili pomembno tudi njeno prijemališče, oz. to v
kateri točki na telo deluje. Enota za silo je Newton [N] in je enaka [kg·m/s2].
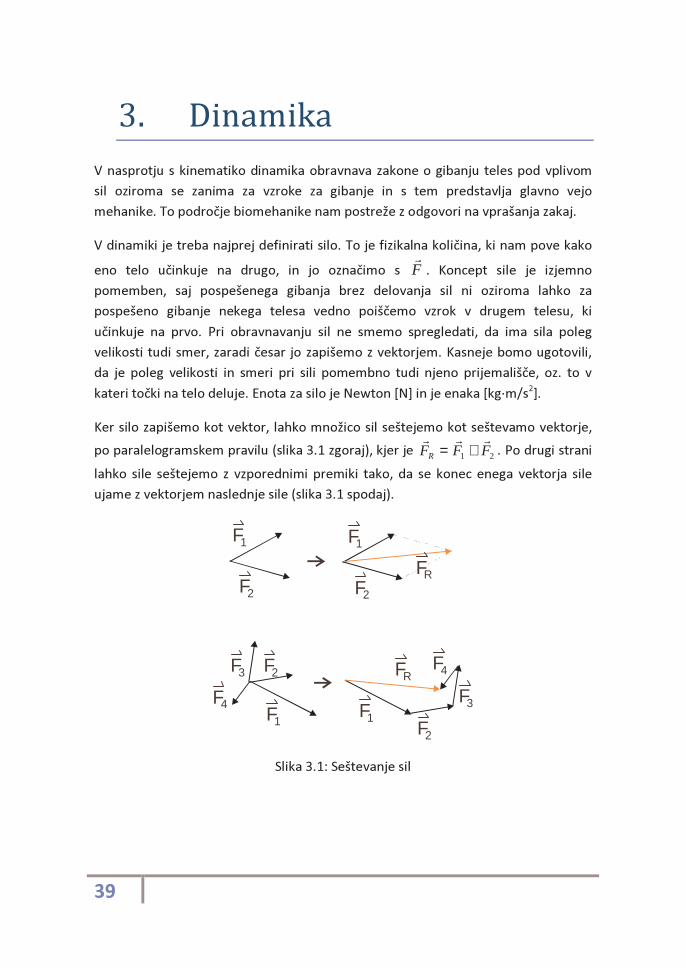
Ker silo zapišemo kot vektor, lahko množico sil seštejemo kot seštevamo vektorje,
po paralelogramskem pravilu (slika 3.1 zgoraj), kjer je 21 FFFR
rrr
+= . Po drugi strani
lahko sile seštejemo z vzporednimi premiki tako, da se konec enega vektorja sile
ujame z vektorjem naslednje sile (slika 3.1 spodaj).
F R F F 2 2
F F 1 1
F R F 4
F 4
F 3
F 3
F 2
F 2
F 1 F 1
Slika 3.1: Seštevanje sil

40
3.1 Osnovnizakonigibanja
Osnovni zakoni klasične mehanike so trije Newtonovi zakoni.
1. Newtonov zakon
Telo miruje ali se giblje premo enakomerno, če nanj ne deluje nobena sila oziroma
je vsota vseh sil, ki delujejo na to telo, enaka nič:
==
⇒=∑ 0
.0
v
konstvF
r
r
r
. (3.1)
2. Newtonov zakon
Vsota vseh sil, ki delujejo na neko telo, je premo sorazmerna s produktom mase
telesa in njegovega pospeška:
∑ = amFr
r
, (3.2)
kjer je m masa telesa.
3. Newtonov zakon
Če prvo telo deluje na drugo z neko silo 12Fr
, potem drugo telo deluje na prvo z
nasprotno enako silo:
1221 FFrr
−= . (3.3)
Tretji Newtonov zakon včasih imenujemo tudi zakon o akciji in reakciji ali pa zakon
o vzajemnem učinku.

41
3.2 Sile
V tem poglavju si bomo ogledali najpogostejše sile, ki delujejo v makroskopski
mehaniki športa.
3.2.1 Sila teže
Sila, s katero Zemlja zaradi svojega gravitacijskega polja privlači k sebi vsa telesa
maso, ki ni enaka nič, imenujemo sila teže ali gravitacijska sila. Označimo jo z gFr
ter je enaka zmnožku mase in gravitacijskega pospeška gr
:
gmFg
r
r
= . (3.4)
Njena smer je enaka smeri gravitacijskega pospeška in kaže v smeri proti središču
Zemlje. To na Zemljinem površju pomeni navpično navzdol.
Gravitacijska sila deluje med vsemi telesi, ki imajo maso. Njeno velikost izračunamo
kot:
221
r
mmFg κ= , (3.5)
kjer sta 1m in 2m masi teles, κ gravitacijska konstanta, r pa je razdalja med
težiščema teles. Ker je gravitacijska konstanta 2311 /106742.6 skgm ⋅⋅= −κ
majhna, gravitacijske sile med običajnimi telesi na Zemlji ne zaznamo. Npr.
gravitacijska sila med dvema 100 kg težkima športnikoma, oddaljenima 1 m, bi bila
le 6.67·10-7 N. Zaznamo jo, kadar ima eno od teles zelo veliko maso, npr. planeti.
Zemlja je planet in ima veliko maso, kgM Zemlje24109742.5 ⋅= , radij Zemlje pa je
»razmeroma« majhen, mrZemlje 6372797= . S pomočjo enačb 3.4 in 3.5 lahko
izračunamo znan gravitacijski pospešek:
22
/8179.9 smr
Mg
Zemlje
Zemlje == κ . (3.6)
Zapomnimo si še, da je gravitacijska sila vedno privlačna in je vzporedna z daljico, ki
povezuje težišči dveh opazovanih teles.
42
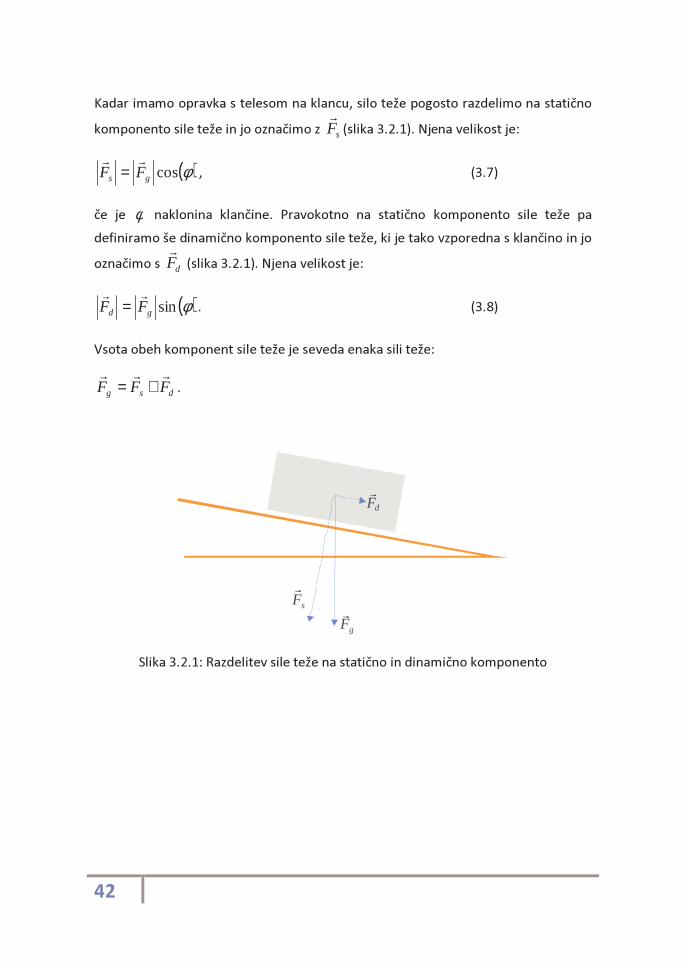
Kadar imamo opravka s telesom na klancu, silo teže pogosto razdelimo na statično
komponento sile teže in jo označimo z sFr
(slika 3.2.1). Njena velikost je:
( )φcosgs FFrr
= , (3.7)
če je φ naklonina klančine. Pravokotno na statično komponento sile teže pa
definiramo še dinamično komponento sile teže, ki je tako vzporedna s klančino in jo
označimo s dFr
(slika 3.2.1). Njena velikost je:
( )φsingd FFrr
= . (3.8)
Vsota obeh komponent sile teže je seveda enaka sili teže:
dsg FFFrrr
+= .
sFr
gFr
dFr
Slika 3.2.1: Razdelitev sile teže na statično in dinamično komponento
43
3.2.2 Sila podlage
Normalna sila
Sila podlage pFr
je reakcija, ki jo povzroči podlaga na opazovano telo. Kadar imamo
opravka s statičnim primerom na ravni podlagi (velja 1. Newtonov zakon), na telo
deluje sila teže, ki kaže navpično navzdol, in nasproti njej po 3. Newtonovem
zakonu reakcija podlage, ki kaže navpično navzgor. To silo imenujemo normalna sila
ali kratko normala in jo označimo s NFr
. Normalna sila zato, ker vedno kaže v smeri
normalnega vektorja podlage, to je pravokotno na podlago.
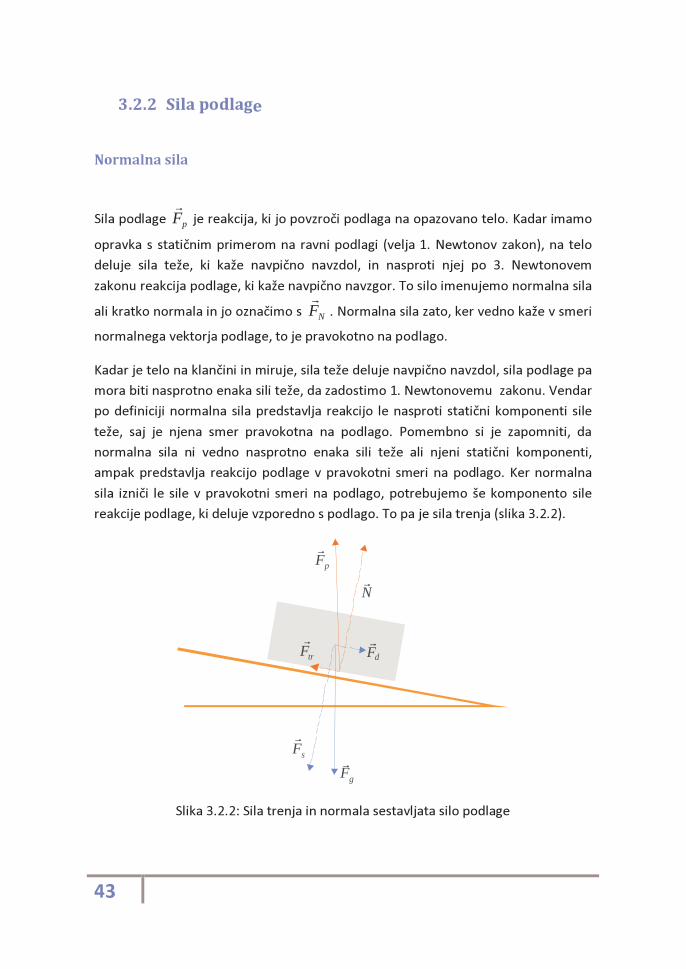
Kadar je telo na klančini in miruje, sila teže deluje navpično navzdol, sila podlage pa
mora biti nasprotno enaka sili teže, da zadostimo 1. Newtonovemu zakonu. Vendar
po definiciji normalna sila predstavlja reakcijo le nasproti statični komponenti sile
teže, saj je njena smer pravokotna na podlago. Pomembno si je zapomniti, da
normalna sila ni vedno nasprotno enaka sili teže ali njeni statični komponenti,
ampak predstavlja reakcijo podlage v pravokotni smeri na podlago. Ker normalna
sila izniči le sile v pravokotni smeri na podlago, potrebujemo še komponento sile
reakcije podlage, ki deluje vzporedno s podlago. To pa je sila trenja (slika 3.2.2).
sFr
gFr
dFr
Nr
trFr
pFr
Slika 3.2.2: Sila trenja in normala sestavljata silo podlage

44
Sila trenja
Trenje se pojavi takrat, kadar eno telo drsi po drugem. Pri tem prihaja do sile, ki se
upira gibanju. Imenujemo jo sila trenja. Posledično deluje v nasprotni smeri gibanja
in vzporedno s podlago. Poznamo statično trenje (relativna hitrost med
opazovanima telesoma je enaka nič), ki ga pogosto imenujemo lepenje in ga
označimo s lFr
, ter kinetično trenje (relativna hitrost med opazovanima telesoma je
različna od nič), ki ga označimo s trFr
. V prejšnjem primeru mirujočega telesa na
klancu bi govorili o sili lepenja, saj imamo opravka s statičnim primerom. Sila
lepenja je po velikosti enaka zmnožku velikosti normalne sile NFr
in koeficienta
lepenja lk :
Nll FkFrr
= . (3.9)
Koeficient lepenja je kvocient med silo lepenja in normalno silo. Na enak način
definiramo kinetično trenje, kjer je sila trenja po velikosti enaka zmnožku velikosti
normalne sile NFr
in koeficienta trenja trk :
Ntrtr FkFrr
= . (3.10)
Tudi tu je koeficient trenja definiran kot kvocient med silo trenja in normalno silo.
Za trenju lahko zapišemo tri zakone:
Amontonov 1. zakon: sila trenja je premo-sorazmerna z obremenitvijo.
Amontonov 2. zakon: sila trenja je neodvisna od kontaktne površine. To velja v
idealnem primeru, kadar imamo opravka s popolnoma togimi in neelastičnimi
telesi.
Coloumbovo trenje: kinetično trenje je neodvisno od hitrosti. Tudi Coloumbovo
trenje je idealiziran primer, saj je trenje pogosto odvisno od hitrosti.
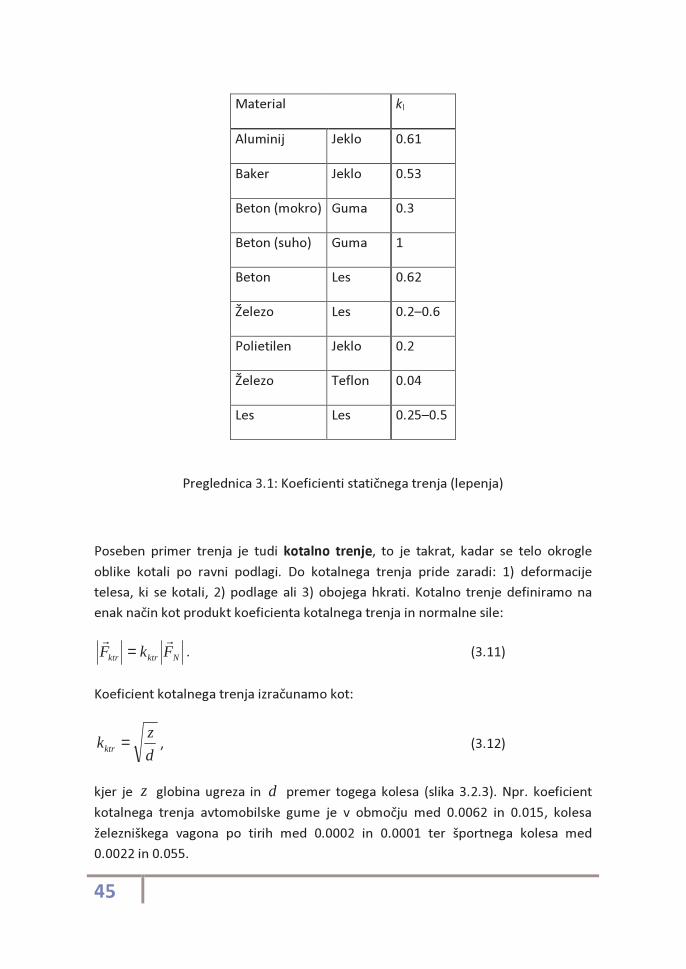
45
Material kl
Aluminij Jeklo 0.61
Baker Jeklo 0.53
Beton (mokro) Guma 0.3
Beton (suho) Guma 1
Beton Les 0.62
Železo Les 0.2–0.6
Polietilen Jeklo 0.2
Železo Teflon 0.04
Les Les 0.25–0.5
Preglednica 3.1: Koeficienti statičnega trenja (lepenja)
Poseben primer trenja je tudi kotalno trenje, to je takrat, kadar se telo okrogle
oblike kotali po ravni podlagi. Do kotalnega trenja pride zaradi: 1) deformacije
telesa, ki se kotali, 2) podlage ali 3) obojega hkrati. Kotalno trenje definiramo na
enak način kot produkt koeficienta kotalnega trenja in normalne sile:
Nktrktr FkFrr
= . (3.11)
Koeficient kotalnega trenja izračunamo kot:
d
zkktr = , (3.12)
kjer je z globina ugreza in d premer togega kolesa (slika 3.2.3). Npr. koeficient
kotalnega trenja avtomobilske gume je v območju med 0.0062 in 0.015, kolesa
železniškega vagona po tirih med 0.0002 in 0.0001 ter športnega kolesa med
0.0022 in 0.055.
46
ktrFr
d
z
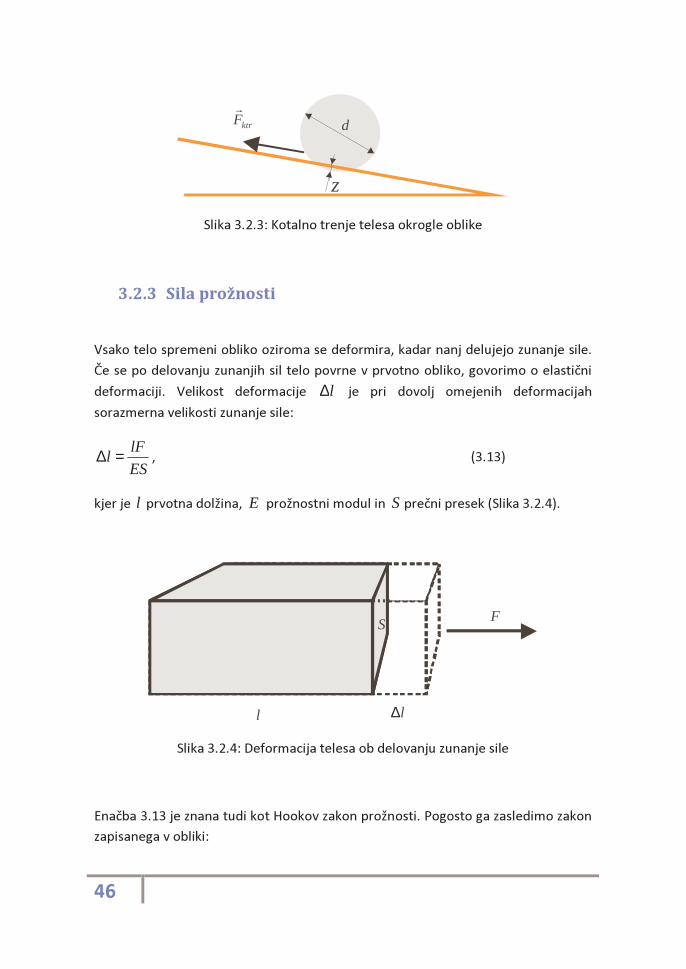
Slika 3.2.3: Kotalno trenje telesa okrogle oblike
3.2.3 Sila prožnosti
Vsako telo spremeni obliko oziroma se deformira, kadar nanj delujejo zunanje sile.
Če se po delovanju zunanjih sil telo povrne v prvotno obliko, govorimo o elastični
deformaciji. Velikost deformacije l∆ je pri dovolj omejenih deformacijah
sorazmerna velikosti zunanje sile:
ES
lFl =∆ ,
(3.13)
kjer je l prvotna dolžina, E prožnostni modul in S prečni presek (Slika 3.2.4).
l
FS
∆l
Slika 3.2.4: Deformacija telesa ob delovanju zunanje sile
Enačba 3.13 je znana tudi kot Hookov zakon prožnosti. Pogosto ga zasledimo zakon
zapisanega v obliki:
47
lkFpr ∆= , (3.14)
kjer je k koeficient prožnosti in prF sila prožnosti.
Telesa se v praksi navadno obnašajo tako, da imajo območje deformacije oziroma
raztezka, kjer se obnašajo elastično (območje veljave Hookovega zakona). Meja, do
koder velja Hookov zakon, se imenuje meja prožnosti. Pri večjih raztezkih pride do
plastične deformacije oziroma do deformacije po kateri se telo ne vrne več v
prvotno obliko. Pri nadaljnjem povečevanju raztezka pride do porušitve oziroma do
pretrganja.
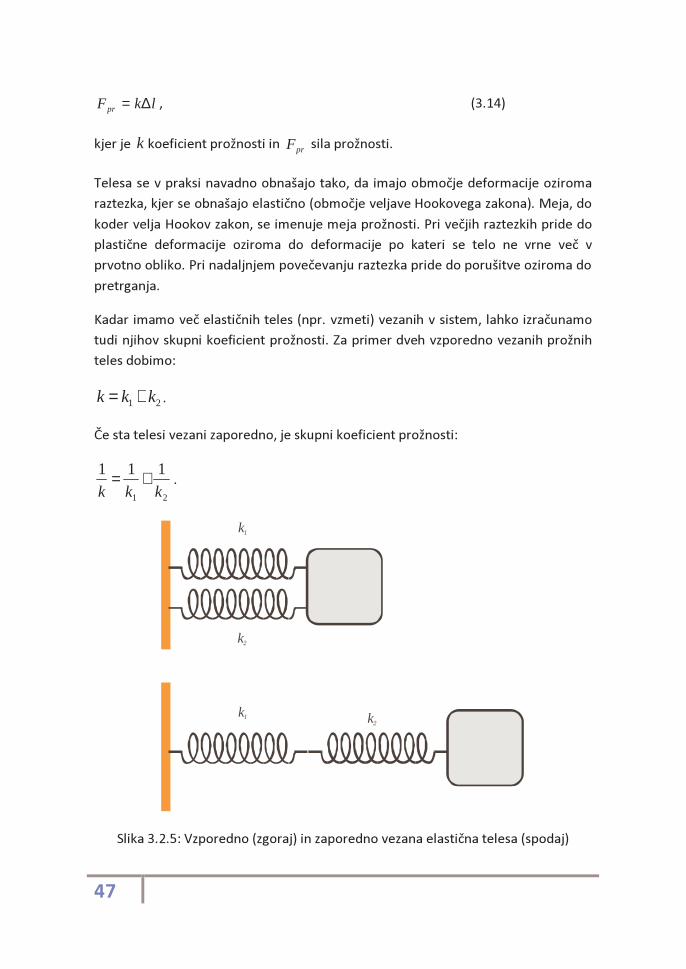
Kadar imamo več elastičnih teles (npr. vzmeti) vezanih v sistem, lahko izračunamo
tudi njihov skupni koeficient prožnosti. Za primer dveh vzporedno vezanih prožnih
teles dobimo:
21 kkk += .
Če sta telesi vezani zaporedno, je skupni koeficient prožnosti:
21
111kkk
+= .
k1
k2
k1 k2
Slika 3.2.5: Vzporedno (zgoraj) in zaporedno vezana elastična telesa (spodaj)

48
3.2.4 Sila upora
V športu navadno opazujemo gibanje, ki se dogaja v različnih medijih.
Najpogostejša sta zrak in voda. Pri gibanju telesa v tekočini ali kadar se tekočina
giblje mimo, telesa se obmejna plast tekočine prilepi na opazovano telo in se giblje
z njim. Plasti tekočine bolj stran od telesa pa drsijo ena ob drugi. Zato se ustvari sila,
ki deluje na telo in ima nasprotno smer relativni hitrosti med telesom in tekočino.
Če je tok laminaren (slika 3.2.6), takšno silo imenujemo viskozni upor. S pomočjo
viskozne sile:
dz
dvSFv η= ,
kjer je η viskoznost tekočine, S stična površina in dz
dv gradient hitrosti, lahko
izračunamo viskozni upor za kroglo:
vrFu
r
r
ηπ6−= , (3.15)
kjer je r polmer krogle.
Slika 3.2.6: Laminarni tok obtekanja tekočine
Kadar imamo opravka z višjo relativno hitrostjo gibanja telesa v mediju in/ali
manjšo viskoznostjo tekočine, se začnejo tokovnice vrtinčiti. Tak tok imenujemo
turbulentni (slika 3.2.7). V primeru turbulentnega toka sila upora ni več sorazmerna
s hitrostjo, ampak s kvadratom hitrosti. Dobimo kvadratni zakon upora:
49
v
vSvcF uu r
r
r
2
2
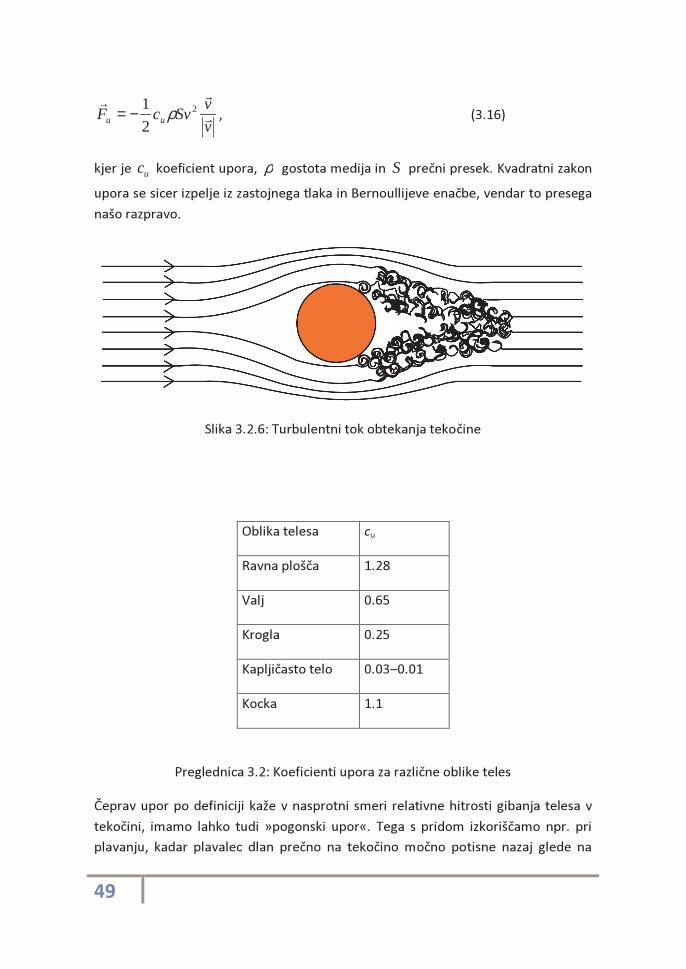
1 ρ−= , (3.16)
kjer je uc koeficient upora, ρ gostota medija in S prečni presek. Kvadratni zakon
upora se sicer izpelje iz zastojnega tlaka in Bernoullijeve enačbe, vendar to presega
našo razpravo.
Slika 3.2.6: Turbulentni tok obtekanja tekočine
Oblika telesa cu
Ravna plošča 1.28
Valj 0.65
Krogla 0.25
Kapljičasto telo 0.03–0.01
Kocka 1.1
Preglednica 3.2: Koeficienti upora za različne oblike teles
Čeprav upor po definiciji kaže v nasprotni smeri relativne hitrosti gibanja telesa v
tekočini, imamo lahko tudi »pogonski upor«. Tega s pridom izkoriščamo npr. pri
plavanju, kadar plavalec dlan prečno na tekočino močno potisne nazaj glede na

50
gibanje težišče telesa. S tem se ustvari sila, ki kaže v smeri naprej. Če je ta sila večja
od sile čelnega upora plavalca, bo s tem pospešil v smeri naprej.
Način obtekanja tekočine okoli telesa določa Reynoldsovo število:
ηρlv
Re = ,
kjer je l značilna linearna razsežnost telesa, ki omejuje tok tekočine (za kroglo ali
cev je enak premeru), v relativna hitrost tekočine glede na opazovano telo, ρ gostota
tekočine in η njena viskoznost. Reynoldsovo število je brez dimenzije in velja, da je
tok obtekanja okrog krogle laminaren, če je Re < 0.5, in turbulenten, če je Re > 2000.
Primer: padalec z maso m = 80 kg skoči s padalom, ki ima prečni presek S = 25 m2.
Izračunaj, kolikšna bo ravnovesna hitrost padalca. Upoštevaj, da je viskoznost zraka
η = 1.72·10-5 Ns/m2, gostota zraka ρ = 1.293 kg/m3 in koeficient upora cu=1.1.
V primeru padalca velja 1. Newtonov zakon, saj iščemo ravnovesno hitrost:
0=∑ Fr
.
Na telo delujeta le sili teže in upora, zato velja:
0=+ ug FFrr
.
Iz tega lahko izrazimo:
2
2
1Svcmg u ρ=
in
smSc
mgv
u
/7.62 ==
ρ.
Z Reynoldsovim številom še preverimo, ali je bilo primerno uporabiti kvadratni
zakon upora:
2000103.2 6 >>⋅≈=ηρlv
Re ,
51
kjer smo privzeli, da je padalo kroglaste oblike 2rS π= in rl 2= .
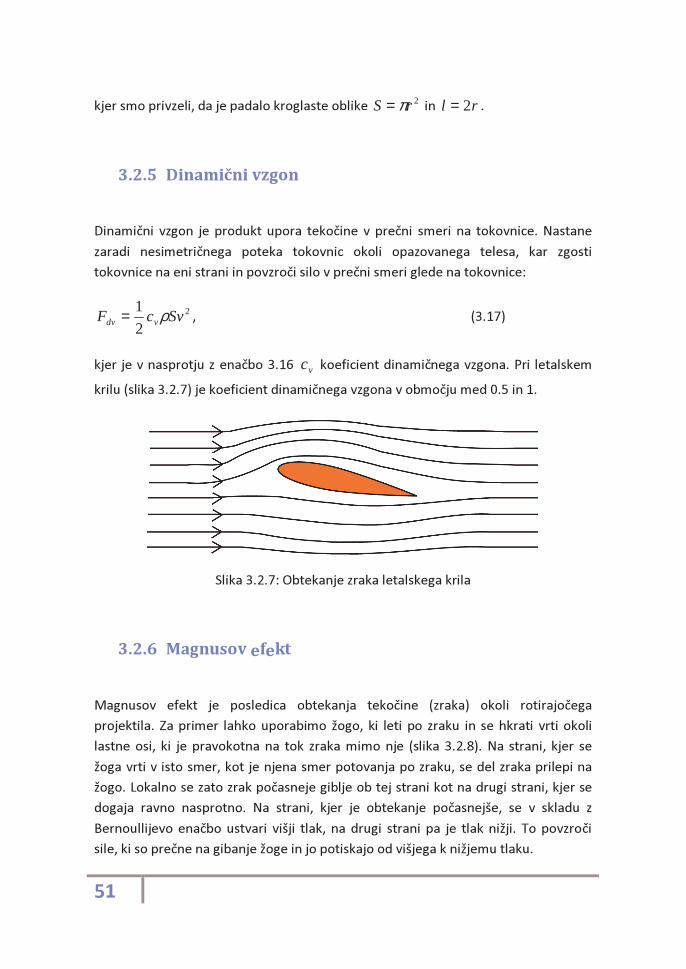
3.2.5 Dinamični vzgon
Dinamični vzgon je produkt upora tekočine v prečni smeri na tokovnice. Nastane
zaradi nesimetričnega poteka tokovnic okoli opazovanega telesa, kar zgosti
tokovnice na eni strani in povzroči silo v prečni smeri glede na tokovnice:
2
2
1SvcF vdv ρ= , (3.17)
kjer je v nasprotju z enačbo 3.16 vc koeficient dinamičnega vzgona. Pri letalskem
krilu (slika 3.2.7) je koeficient dinamičnega vzgona v območju med 0.5 in 1.
Slika 3.2.7: Obtekanje zraka letalskega krila
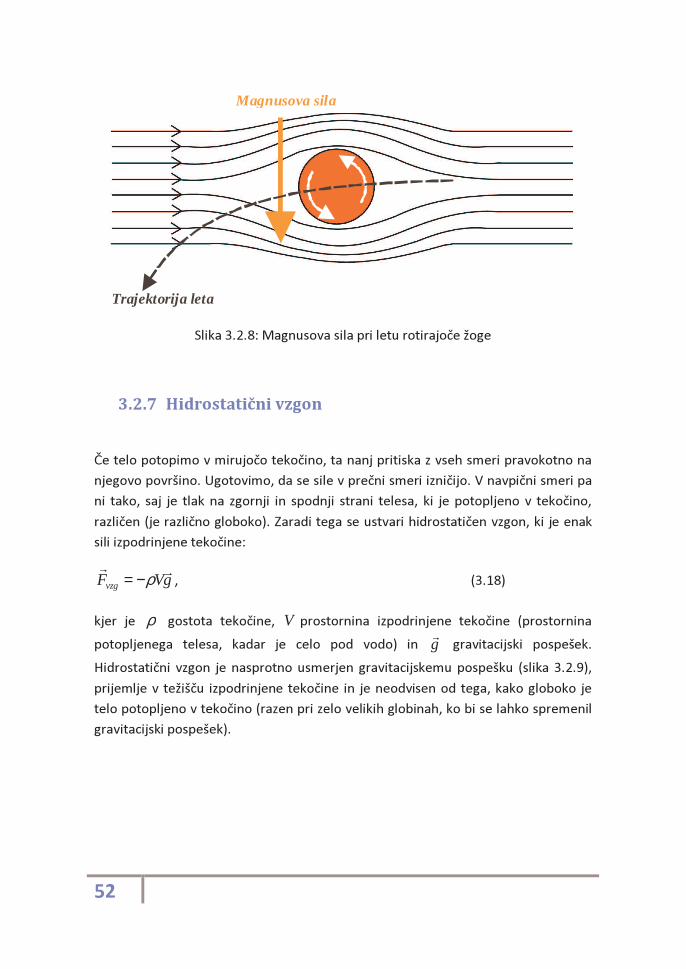
3.2.6 Magnusov efekt
Magnusov efekt je posledica obtekanja tekočine (zraka) okoli rotirajočega
projektila. Za primer lahko uporabimo žogo, ki leti po zraku in se hkrati vrti okoli
lastne osi, ki je pravokotna na tok zraka mimo nje (slika 3.2.8). Na strani, kjer se
žoga vrti v isto smer, kot je njena smer potovanja po zraku, se del zraka prilepi na
žogo. Lokalno se zato zrak počasneje giblje ob tej strani kot na drugi strani, kjer se
dogaja ravno nasprotno. Na strani, kjer je obtekanje počasnejše, se v skladu z
Bernoullijevo enačbo ustvari višji tlak, na drugi strani pa je tlak nižji. To povzroči
sile, ki so prečne na gibanje žoge in jo potiskajo od višjega k nižjemu tlaku.
52
Magnusova sila
Trajektorija leta
Slika 3.2.8: Magnusova sila pri letu rotirajoče žoge
3.2.7 Hidrostatični vzgon
Če telo potopimo v mirujočo tekočino, ta nanj pritiska z vseh smeri pravokotno na
njegovo površino. Ugotovimo, da se sile v prečni smeri izničijo. V navpični smeri pa
ni tako, saj je tlak na zgornji in spodnji strani telesa, ki je potopljeno v tekočino,
različen (je različno globoko). Zaradi tega se ustvari hidrostatičen vzgon, ki je enak
sili izpodrinjene tekočine:
gVFvzg
r
r
ρ−= , (3.18)
kjer je ρ gostota tekočine, V prostornina izpodrinjene tekočine (prostornina
potopljenega telesa, kadar je celo pod vodo) in gr
gravitacijski pospešek.
Hidrostatični vzgon je nasprotno usmerjen gravitacijskemu pospešku (slika 3.2.9),
prijemlje v težišču izpodrinjene tekočine in je neodvisen od tega, kako globoko je
telo potopljeno v tekočino (razen pri zelo velikih globinah, ko bi se lahko spremenil
gravitacijski pospešek).

53
vzgFr
Slika 3.2.9: Delovanje sile vzgona
Primer: izračunaj, kolikšen je vzgon športnika z maso m = 80 kg na zraku. Upoštevaj,
da je gostota človekovega telesa ρt = 1.05 kg/dm3 in gostota zraka ρz = 1.293 kg/m3.
Iz gostote telesa izračunamo prostornino človeka:
32.76 dmm
Vt
==ρ
in nato velikost sile vzgona:
NVgF zvzg 98.0=−= ρr
.
Ugotovimo, da vzgon na športnika deluje tudi na zraku, vendar je zaradi majhne
gostote zraka zanemarljiv.
3.2.8 Sile pri kroženju
V poglavju 2.2.2 smo si ogledali kinematiko kroženja. Torej vemo, da je kroženje
gibanje, kjer imamo v splošnem tangencialni in radialni pospešek. Kadar govorimo o
enakomernem kroženju, je tangencialni pospešek enak nič, radialni pospešek pa je
po enačbi 2.36:
( ) ( )( ) 22 0,sin,cos ωωωω rttrar
rr −=−= .
Tako lahko na osnovi 2. Newtonovega zakona trdimo, da mora biti vsota vseh sil v
radialni smeri enaka ramr
, da bo telo krožilo:
54
ramFr
r
∑ = . (3.19)
Iz enačbe 2.36 sledi, da je vsota vseh sil enaka:
−=−=∑ r
r
r
vmrmF
r
r
r
r
22ω . (3.20)
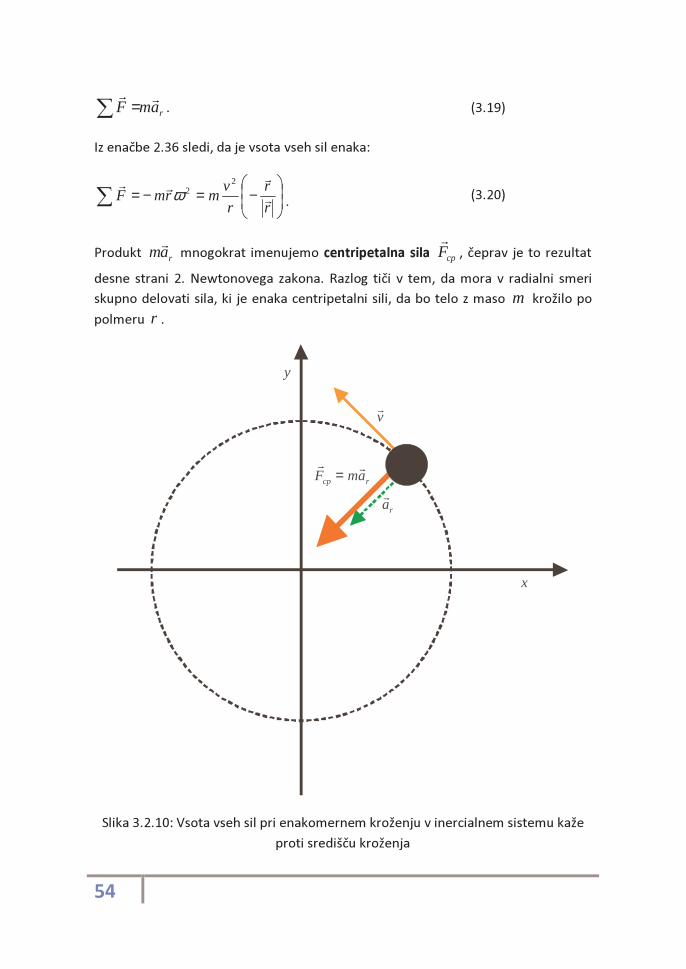
Produkt ramr
mnogokrat imenujemo centripetalna sila cpFr
, čeprav je to rezultat
desne strani 2. Newtonovega zakona. Razlog tiči v tem, da mora v radialni smeri
skupno delovati sila, ki je enaka centripetalni sili, da bo telo z maso m krožilo po
polmeru r .
x
y
rar
rcp amFr
r
=
vr
Slika 3.2.10: Vsota vseh sil pri enakomernem kroženju v inercialnem sistemu kaže
proti središču kroženja
55
Zgornji opis pripišemo sistemu zunanjega opazovalca oz. opazovalca, ki se ne giblje
pospešeno. Bolj učeno tak sistem imenujemo inercialni. Ker pa je kroženje
razmeroma zapleteno za obravnavo, ga mnogokrat raje obravnavamo v
neinercialnem sistemu oziroma v pospešenem sistemu, ki ga imenujemo tudi
sistem notranjega opazovalca. V njem enakomerno kroženje obravnavamo tako, da
se sistem vrti hkrati z opazovanim telesom. Posledica tega je, da opazovano telo v
tem sistemu miruje in je vsota vseh sil ter s tem tudi sil v radialni smeri enaka nič:
0∑ =radFr
, (3.21)
čeprav telo kroži. Posledica izbire krožečega neinercialnega sistema je sistemska
sila, ki se imenuje centrifugalna sila cfFr
(slika 3.2.11). Po velikosti je enaka
centripetalni sili, le da ima smer nasprotno enako in tako kaže v smeri radij-vektorja
oz. iz središča kroženja radialno navzven. Deluje na vsa telesa, ki jih obravnavamo v
takem krožečem sistemu.
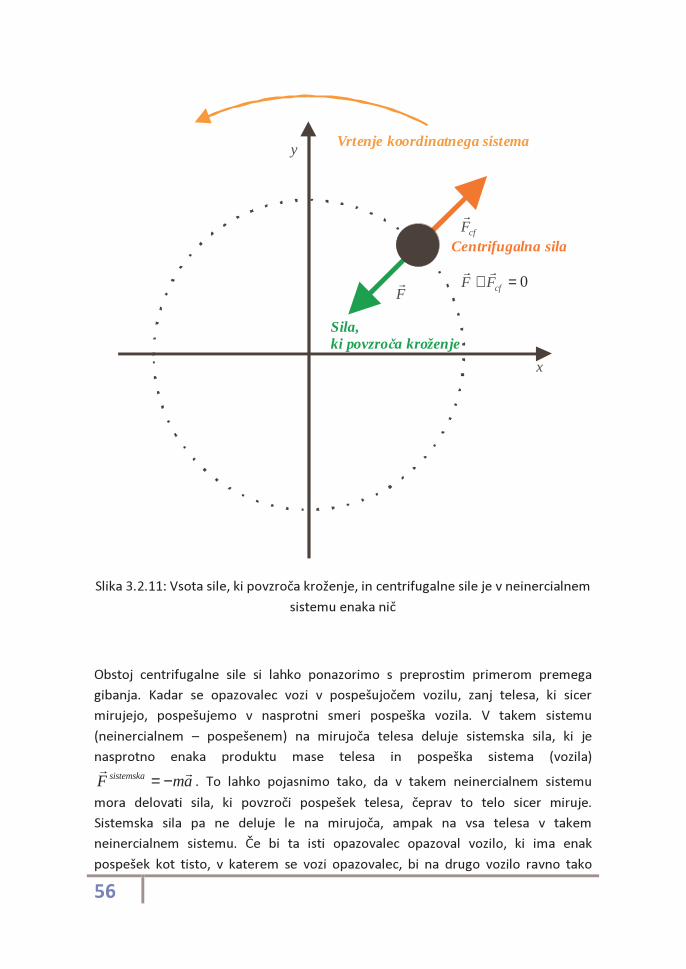
56
x
yVrtenje koordinatnega sistema
Sila, ki povzroča kroženje
Centrifugalna silacfFr
Fr 0=+ cfFF
rr
Slika 3.2.11: Vsota sile, ki povzroča kroženje, in centrifugalne sile je v neinercialnem
sistemu enaka nič
Obstoj centrifugalne sile si lahko ponazorimo s preprostim primerom premega
gibanja. Kadar se opazovalec vozi v pospešujočem vozilu, zanj telesa, ki sicer
mirujejo, pospešujemo v nasprotni smeri pospeška vozila. V takem sistemu
(neinercialnem – pospešenem) na mirujoča telesa deluje sistemska sila, ki je
nasprotno enaka produktu mase telesa in pospeška sistema (vozila)
amF sistemska r
r
−= . To lahko pojasnimo tako, da v takem neinercialnem sistemu
mora delovati sila, ki povzroči pospešek telesa, čeprav to telo sicer miruje.
Sistemska sila pa ne deluje le na mirujoča, ampak na vsa telesa v takem
neinercialnem sistemu. Če bi ta isti opazovalec opazoval vozilo, ki ima enak
pospešek kot tisto, v katerem se vozi opazovalec, bi na drugo vozilo ravno tako
57
delovala sistemska sila nasprotno enaka produktu mase in pospeška. Ker pa v tem
neinercialnem sistemu drugo vozilo miruje, bi bila vsota vseh sil nanj enaka nič.
Enak razmislek lahko opravimo tudi v krožečem sistemu, le da je tam pospešek
sistema enak radialnemu pospešku, sistemska sila pa je enaka centrifugalni.
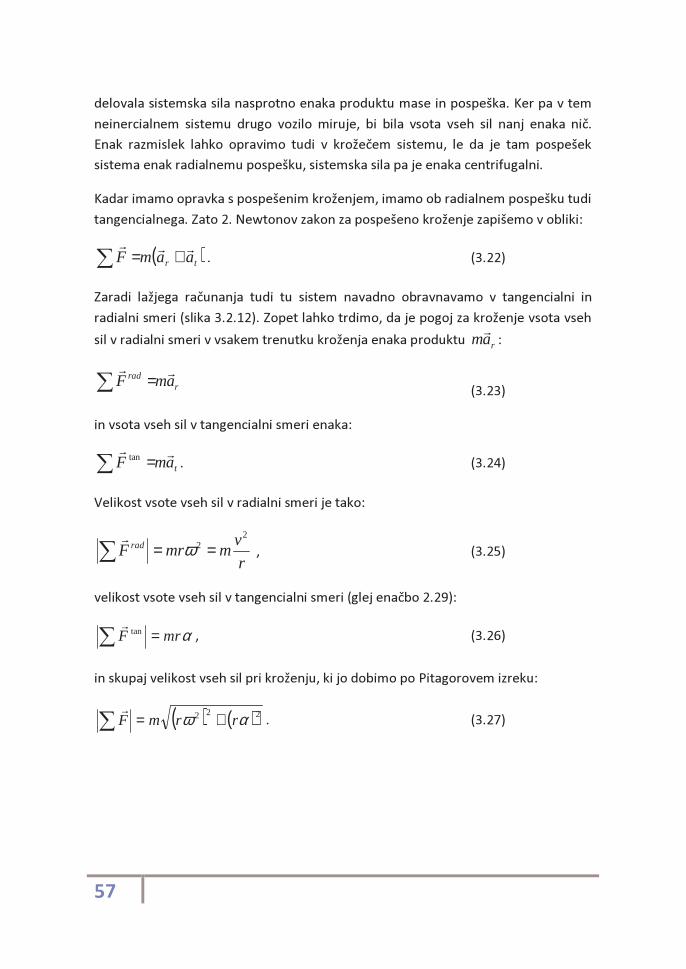
Kadar imamo opravka s pospešenim kroženjem, imamo ob radialnem pospešku tudi
tangencialnega. Zato 2. Newtonov zakon za pospešeno kroženje zapišemo v obliki:
( )tr aamFrr
r
+=∑ . (3.22)
Zaradi lažjega računanja tudi tu sistem navadno obravnavamo v tangencialni in
radialni smeri (slika 3.2.12). Zopet lahko trdimo, da je pogoj za kroženje vsota vseh
sil v radialni smeri v vsakem trenutku kroženja enaka produktu ramr
:
rrad amF
r
r
∑ = (3.23)
in vsota vseh sil v tangencialni smeri enaka:
tamFr
r
∑ =tan. (3.24)
Velikost vsote vseh sil v radialni smeri je tako:
r
vmmrF rad
22 ==∑ ω
r
, (3.25)
velikost vsote vseh sil v tangencialni smeri (glej enačbo 2.29):
αmrF =∑tan
r
, (3.26)
in skupaj velikost vseh sil pri kroženju, ki jo dobimo po Pitagorovem izreku:
( ) ( )222 αω rrmF +=∑r
. (3.27)
58
x
y
ramr
tamr
Σ ( )tr aamFrr
r
+=
Slika 3.2.12: Vsota vseh sil v radialni in tangencialni smeri pri pospešenem kroženju
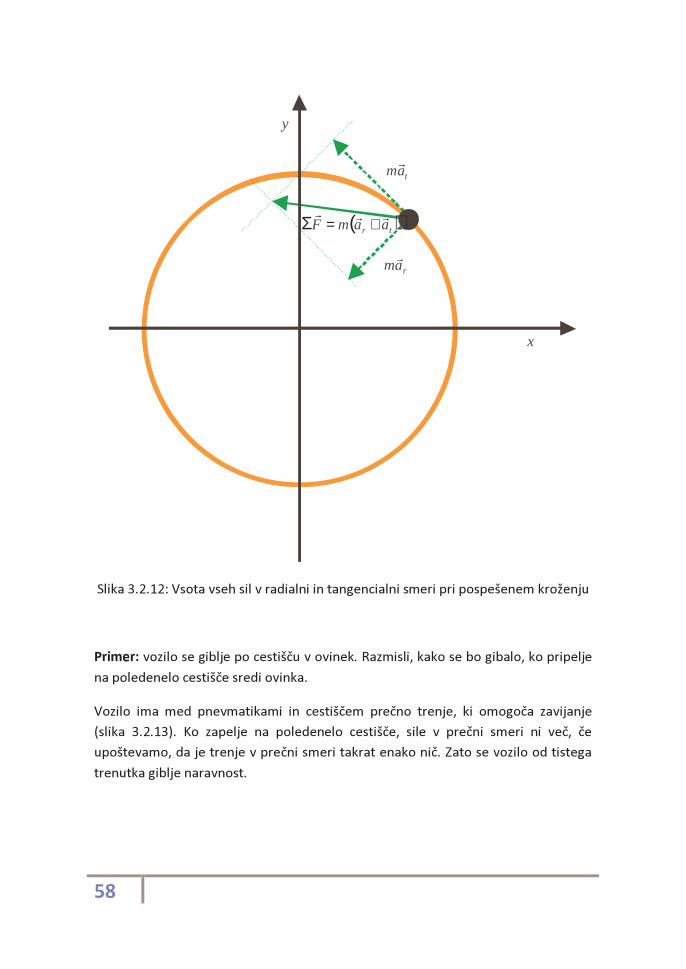
Primer: vozilo se giblje po cestišču v ovinek. Razmisli, kako se bo gibalo, ko pripelje
na poledenelo cestišče sredi ovinka.
Vozilo ima med pnevmatikami in cestiščem prečno trenje, ki omogoča zavijanje
(slika 3.2.13). Ko zapelje na poledenelo cestišče, sile v prečni smeri ni več, če
upoštevamo, da je trenje v prečni smeri takrat enako nič. Zato se vozilo od tistega
trenutka giblje naravnost.
59
trFr
0=trFr
3.2.13: Sila trenja v prečni smeri med vozilom in cestiščem je prisotna, dokler imajo
gume oprijem
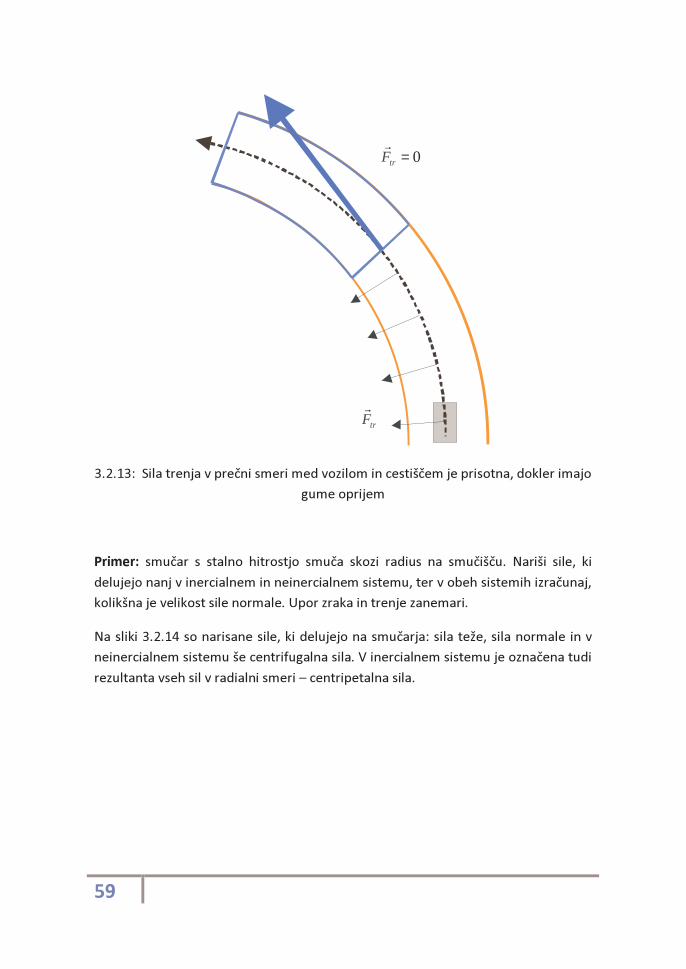
Primer: smučar s stalno hitrostjo smuča skozi radius na smučišču. Nariši sile, ki
delujejo nanj v inercialnem in neinercialnem sistemu, ter v obeh sistemih izračunaj,
kolikšna je velikost sile normale. Upor zraka in trenje zanemari.
Na sliki 3.2.14 so narisane sile, ki delujejo na smučarja: sila teže, sila normale in v
neinercialnem sistemu še centrifugalna sila. V inercialnem sistemu je označena tudi
rezultanta vseh sil v radialni smeri – centripetalna sila.

60
Nr
gFr
cpFr
Nr
gFr
cfFr
Inercialni sistem Neinercialni sistem
3.2.14: Sile, ki delujejo na smučarja v inercialnem in neinercialnem sistemu
Kot smo se učili, je v inercialnem sistemu vsota vseh sil v radialni smeri enaka
centripetalni sili oziroma produktu mase in radialnega pospeška:
cpr FamFr
r
r
==∑ .
ker so vse sile vzporedne, dobimo:
cpg FFN =−
in
cpg FFN += .
V neinercialnem sistemu je po 2. Newtonovem zakonu vsota vseh sil enaka nič:
0∑ =Fr
.
Podobno tudi tu velja:
0=−− cfg FFN .
Dobimo enak rezultat:
cpg FFN += .

61
3.3 Suneksileingibalnakoličina
Drugi Newtonov zakon preoblikujmo tako, da pospešek zapišemo kot odvod hitrosti
po času:
dt
vdmF
r
r
= ,
in vsoto vseh zunanjih sil, ki delujejo na telo, zapišimo kot:
∑= FFrr
.
Če obe strani enačbe 2. Newtonovega zakona integriramo po času, dobimo:
( ) ( )12
2
1
tvmtvmdtFt
t
rr
r
−=∫ . (3.28)
Količino na levi strani enačbe imenujemo sunek sile, na desni strani pa dobimo
razliko produktov mase in hitrosti ob končnem in začetnem času, ki ju imenujemo
sprememba gibalne količine:
( ) ( )12 tvmtvmGrr
r
−=∆ , (3.29)
produkt mase in hitrosti pa gibalna količina:
vmGr
r
= . (3.30)
Enačba 3.28 hkrati predstavlja tudi izrek o spremembi gibalne količine, ki pravi, da
se gibalna količina telesa spremeni, kadar je sunek zunanjih sil različen od nič.
Nasprotno tudi velja, da se gibalna količina telesa ohrani natanko takrat, kadar je
sunek zunanjih sil enak nič.
Kadar imamo opravka s stalnimi silami, lahko enačbo 3.28 zapišemo v obliki:
( ) ( )12 tvmtvmtFrr
r
−=∆ , (3.31)
kjer je 12 ttt −=∆ .
62
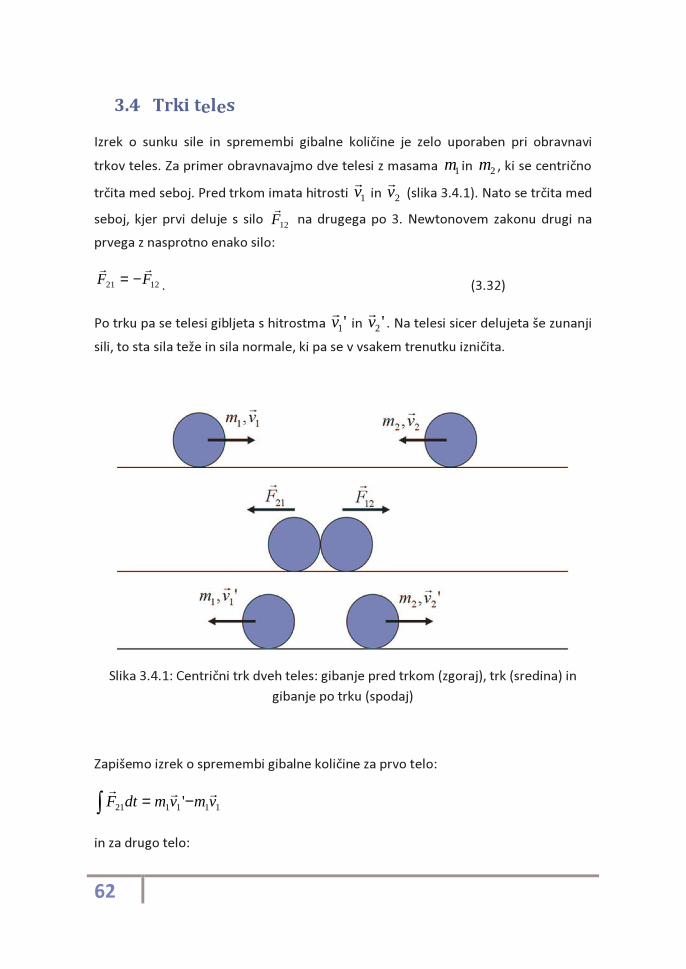
3.4 Trki teles
Izrek o sunku sile in spremembi gibalne količine je zelo uporaben pri obravnavi
trkov teles. Za primer obravnavajmo dve telesi z masama 1m in 2m , ki se centrično
trčita med seboj. Pred trkom imata hitrosti 1vr
in 2v
r
(slika 3.4.1). Nato se trčita med
seboj, kjer prvi deluje s silo 12Fr
na drugega po 3. Newtonovem zakonu drugi na
prvega z nasprotno enako silo:
1221 FFrr
−= . (3.32)
Po trku pa se telesi gibljeta s hitrostma '1vr
in '2vr
. Na telesi sicer delujeta še zunanji
sili, to sta sila teže in sila normale, ki pa se v vsakem trenutku izničita.
Slika 3.4.1: Centrični trk dveh teles: gibanje pred trkom (zgoraj), trk (sredina) in
gibanje po trku (spodaj)
Zapišemo izrek o spremembi gibalne količine za prvo telo:
111121 ' vmvmdtFrr
r
−=∫
in za drugo telo:

63
222212 ' vmvmdtFrr
r
−=∫ .
Sedaj pa obravnavajmo obe telesi, ki trčita med seboj, kot naš opazovani sistem. V
tem primeru seštejemo oba sunka teles na levi strani enačbe in obe spremembi
gibalnih količin na desni strani:
∫ ∫ −+−=+ 111122222112 '' vmvmvmvmdtFdtFrrrr
rr
.
Zaradi 3. Newtonovega zakona (enačbi 3.32) tudi velja, da je vsota sunkov sil enaka
nič:
∫ ∫ =+ 02112 dtFdtFrr
.
Zato velja, da je 11112222 ''0 vmvmvmvmrrrr
−+−= . Če enačbo preuredimo, dobimo:
'' 22112211 vmvmvmvmrrrr
+=+ , (3.33)
Kar pomeni, da se gibalna količina sistema dveh teles med trkom ohrani, saj je
gibalna količina pred trkom enaka gibalni količini po njem:
popopredpred GGGG 2121
rrrr
+=+ . (3.34)
Na osnovi izreka o sunku sile in spremembi gibalne količine to drži, kadar je vsota
zunanjih sil enaka nič. Ker pa so trki zelo kratki, lahko v dobrem približku trdimo, da
je sunek zunanjih sil med trkom enak nič. Torej bi lahko izrek, da se gibalna količina
sistema dveh teles med trkom ohrani, uporabili tudi takrat, kadar imamo zunanje
sile (npr. sila teže in sila upora pri trku dveh letal v zraku).
Za obravnavo trkov je uporabno definirati tudi relativno hitrost. Kadar se telesi
približujeta (slika 3.4.2), je relativna hitrost višja, 21 vvvr
rrr
−= , saj velja:
2121 )( vvvvvr +=−−= .
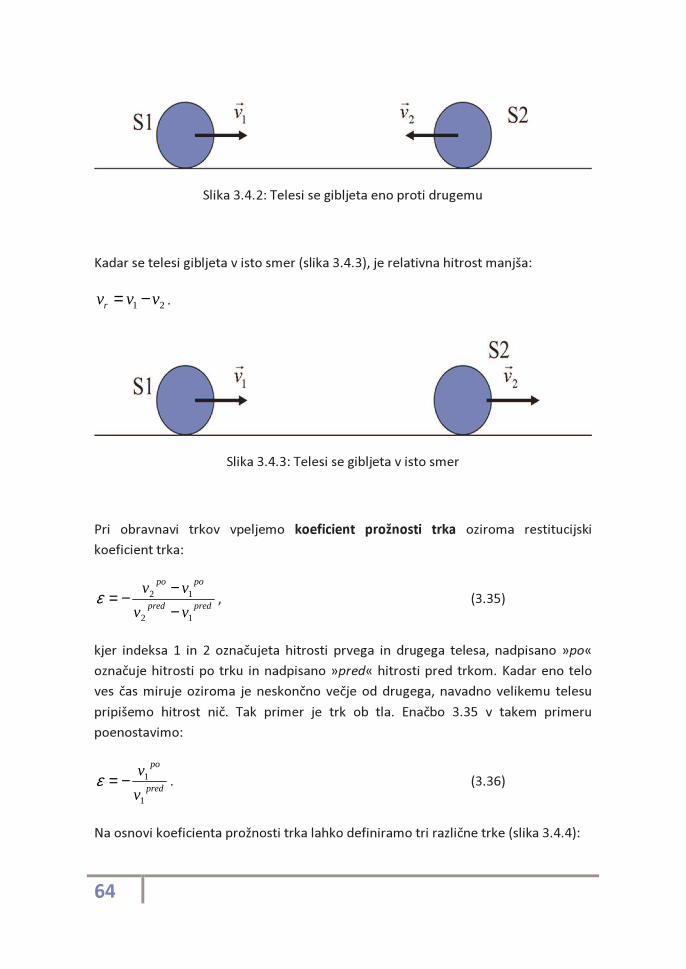
64
Slika 3.4.2: Telesi se gibljeta eno proti drugemu
Kadar se telesi gibljeta v isto smer (slika 3.4.3), je relativna hitrost manjša:
21 vvvr −= .
Slika 3.4.3: Telesi se gibljeta v isto smer
Pri obravnavi trkov vpeljemo koeficient prožnosti trka oziroma restitucijski
koeficient trka:
predpred
popo
vv
vv
12
12
−−
−=ε , (3.35)
kjer indeksa 1 in 2 označujeta hitrosti prvega in drugega telesa, nadpisano »po«
označuje hitrosti po trku in nadpisano »pred« hitrosti pred trkom. Kadar eno telo
ves čas miruje oziroma je neskončno večje od drugega, navadno velikemu telesu
pripišemo hitrost nič. Tak primer je trk ob tla. Enačbo 3.35 v takem primeru
poenostavimo:
pred
po
v
v
1
1−=ε . (3.36)
Na osnovi koeficienta prožnosti trka lahko definiramo tri različne trke (slika 3.4.4):
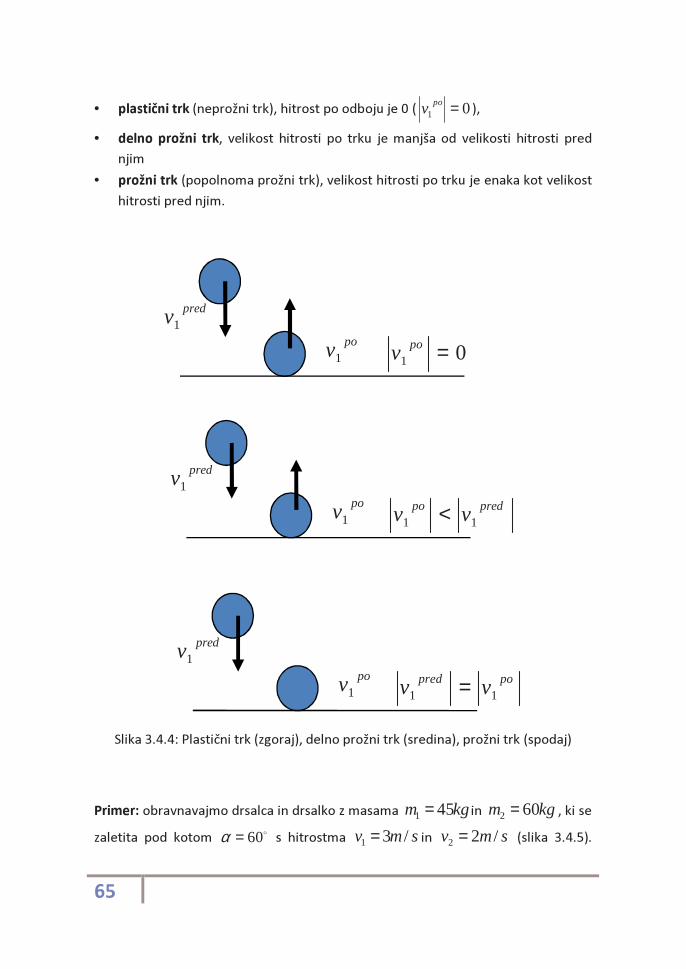
65
• plastični trk (neprožni trk), hitrost po odboju je 0 ( 01 =pov ),
• delno prožni trk, velikost hitrosti po trku je manjša od velikosti hitrosti pred
njim
• prožni trk (popolnoma prožni trk), velikost hitrosti po trku je enaka kot velikost
hitrosti pred njim.
Slika 3.4.4: Plastični trk (zgoraj), delno prožni trk (sredina), prožni trk (spodaj)
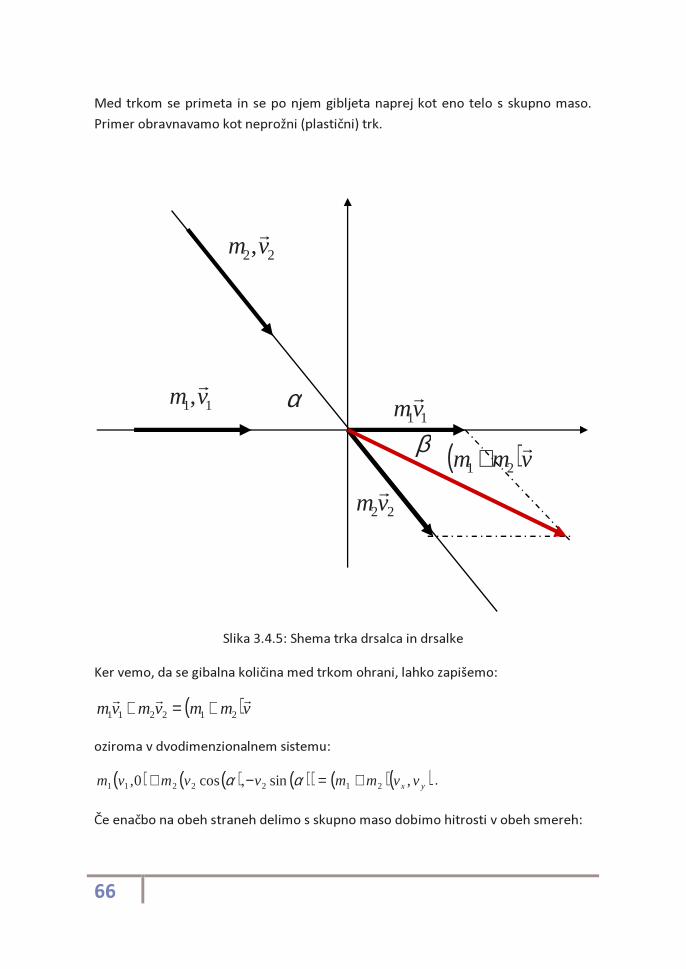
Primer: obravnavajmo drsalca in drsalko z masama kgm 451 = in kgm 602 = , ki se
zaletita pod kotom o60=α s hitrostma smv /31 = in smv /22 = (slika 3.4.5).
predv1
pov1 01 =pov
predv1
pov1predpo vv 11 <
predv1
pov1popred vv 11 =
66
Med trkom se primeta in se po njem gibljeta naprej kot eno telo s skupno maso.
Primer obravnavamo kot neprožni (plastični) trk.
Slika 3.4.5: Shema trka drsalca in drsalke
Ker vemo, da se gibalna količina med trkom ohrani, lahko zapišemo:
( )vmmvmvmrrr
212211 +=+
oziroma v dvodimenzionalnem sistemu:
( ) ( ) ( )( ) ( )( )yx vvmmvvmvm ,sin,cos0, 2122211 +=−+ αα .
Če enačbo na obeh straneh delimo s skupno maso dobimo hitrosti v obeh smereh:
11,vmr
22,vmr
11vmr
22vmr
( )vmmr
21 +β
α
67
( ) ( ) ( ) ( )smsmmm
vm
mm
vmvmvv yx /02.1,/81.1
sin0,
cos,
21
22
21
2211 −=
+−
++
=αα
.
S pomočjo kotnih funkcij dobimo kot, pod katerim se gibljeta pod trku:
°−=−== 4.2981.1
02.1atg
v
vatg
x
yβ ,
in s pomočjo Pitagorovega izreka še velikost hitrosti:
smvvv yx /08.222 =+=r
.
Primer: pravila košarkarske zveze NCAA zahtevajo, da ima žoga primeren odboj.
Test je videti tako, da žogo izpustijo z višine mH 83.11 = , ki se mora odbiti nazaj na
višino mHm 37.124.1 2 << (glej sliko 3.4.6). Izračunajmo, kolikšen mora biti
koeficient prožnosti trka za žogo, da ustreza pravilom NCAA.
Slika 3.4.6: Odboj žoge od tal
Za reševanje naloge uporabimo enačbo 3.36:
1
2
1
2
1
1
2
2
H
H
gH
gH
v
vpred
po
==−=ε .
Ker potrebujemo zgornjo in spodnjo mejo, dobimo:
68
83.1
37.1
83.1
24.1 << ε
oziroma
86.082.0 << ε .
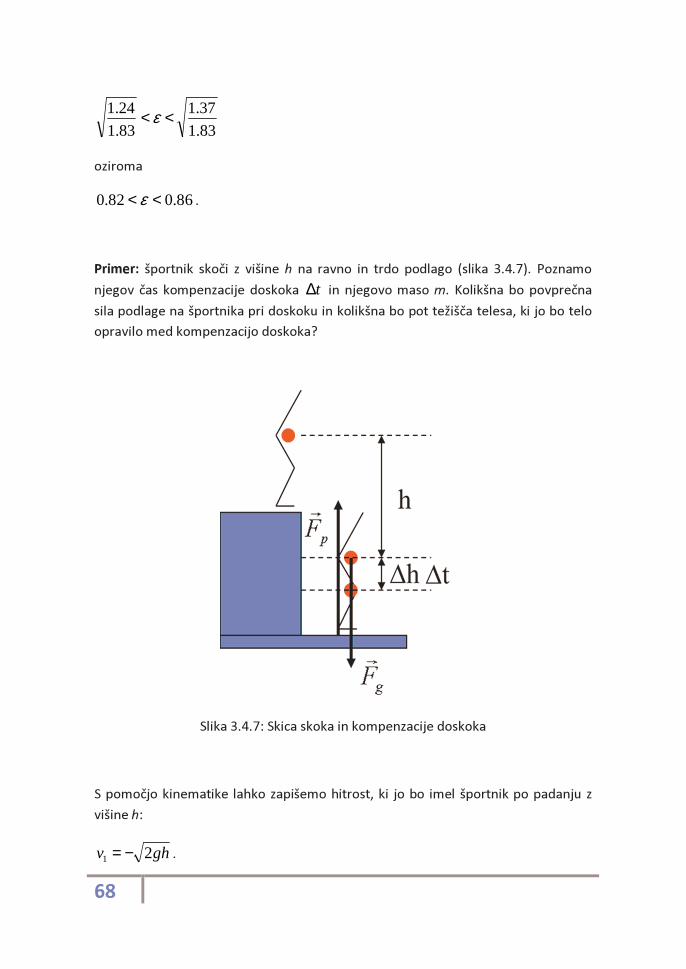
Primer: športnik skoči z višine h na ravno in trdo podlago (slika 3.4.7). Poznamo
njegov čas kompenzacije doskoka t∆ in njegovo maso m. Kolikšna bo povprečna
sila podlage na športnika pri doskoku in kolikšna bo pot težišča telesa, ki jo bo telo
opravilo med kompenzacijo doskoka?
Slika 3.4.7: Skica skoka in kompenzacije doskoka
S pomočjo kinematike lahko zapišemo hitrost, ki jo bo imel športnik po padanju z
višine h:
ghv 21 −= .

69
Zapišimo 2. Newtonov zakon za doskok, kjer delujeta sili teže in podlage:
amFF gp
r
rr
=+ .
Izrazimo silo podlage:
gmamFp
rr
r
−=
in enačbo zapišimo za vertikalno smer, kjer smo označili, da je navzgor pozitivno:
mgmaFp += .
Zapišimo izrek o spremembi gibalne količine za vertikalno smer, kjer vemo, da je
hitrost športnika na koncu kompenzacije enaka 0:
ghmmvtF 20 1 =−=∆ .
Ker pri doskoku deluje tudi sila teže, tF∆ pa je po definiciji vsota vseh zunanjih
sunkov navorov, je sila podlage po 2. Newtonovem zakonu enaka:
mgt
ghmmgFFp +
∆=+=
2.
Spremembo višine težišča telesa pa dobimo s pomočjo kinematike:
( ) ( ) ( )22
2
2
2
221
222
1
tvtghtt
ghtata
tvh∆−
=∆
=∆
∆=∆=∆−∆=∆ .
Negativni predznak označuje, da se je težišče telesa premaknilo navzdol.

70
3.5 Sistemmasnihtočkintogotelo
Vsota gibalnih količin masnih točk je enaka gibalni količini sistema masnih točk:
vmvmi i
iii
rr
∑ ∑
= , (3.37)
kjer indeks i teče po vseh masnih točkah in je vr
hitrost sistema. Če obe strani
enačbe odvajamo po času:
=
∑∑ vm
dt
dvm
dt
d
ii
iii
rr
in upoštevamo, da se masa s časom ne spreminja, dobimo:
dt
vdm
dt
vdm
ii
i
ii
rr
= ∑∑ .
Z upoštevanjem definicije o pospešku enačba dobi obliko:
amami
ii
ii
rr
= ∑∑ .
Ker je po 2. Newtonovem zakonu vsota vseh sil, ki delujejo na i-to telo, enaka
iik
ik amF
r
r
=∑ ,
lahko zapišemo:
amFi
ii k
ik
r
r
=
∑∑ ∑ .
Zdaj sile v sistemu masnih točk razdelimo na notranje (sile med masnimi točkami)
in zunanje, torej sile, ki od zunaj delujejo na sistem masnih točk:
amFFFFij i
iijn
r
rrrr
∑ ∑
=++++ ...21 .
71
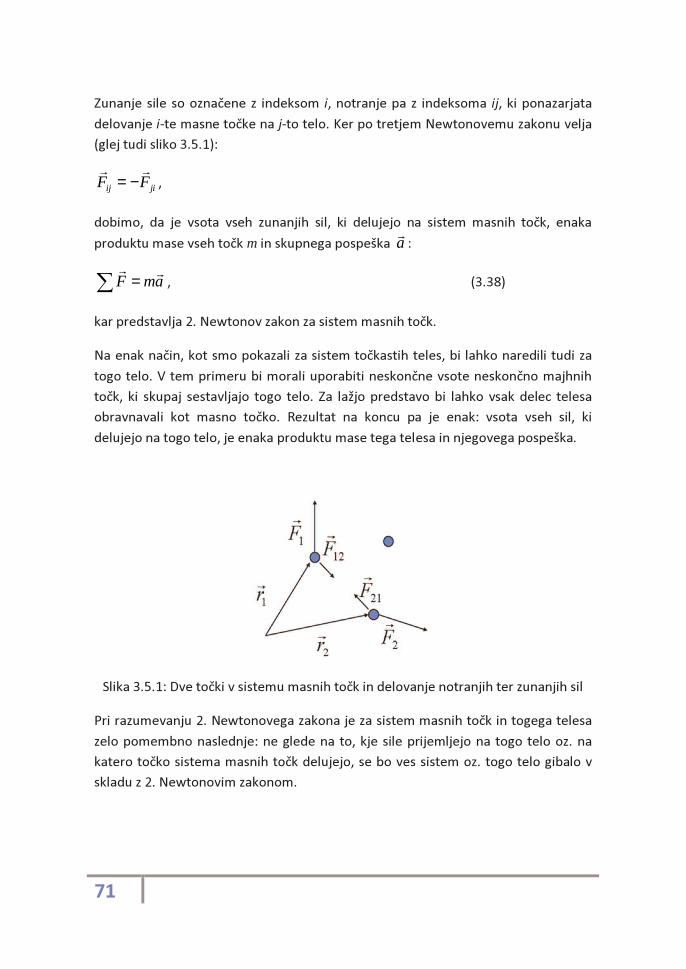
Zunanje sile so označene z indeksom i, notranje pa z indeksoma ij, ki ponazarjata
delovanje i-te masne točke na j-to telo. Ker po tretjem Newtonovemu zakonu velja
(glej tudi sliko 3.5.1):
jiij FFrr
−= ,
dobimo, da je vsota vseh zunanjih sil, ki delujejo na sistem masnih točk, enaka
produktu mase vseh točk m in skupnega pospeška ar
:
amFr
r
=∑ , (3.38)
kar predstavlja 2. Newtonov zakon za sistem masnih točk.
Na enak način, kot smo pokazali za sistem točkastih teles, bi lahko naredili tudi za
togo telo. V tem primeru bi morali uporabiti neskončne vsote neskončno majhnih
točk, ki skupaj sestavljajo togo telo. Za lažjo predstavo bi lahko vsak delec telesa
obravnavali kot masno točko. Rezultat na koncu pa je enak: vsota vseh sil, ki
delujejo na togo telo, je enaka produktu mase tega telesa in njegovega pospeška.
Slika 3.5.1: Dve točki v sistemu masnih točk in delovanje notranjih ter zunanjih sil
Pri razumevanju 2. Newtonovega zakona je za sistem masnih točk in togega telesa
zelo pomembno naslednje: ne glede na to, kje sile prijemljejo na togo telo oz. na
katero točko sistema masnih točk delujejo, se bo ves sistem oz. togo telo gibalo v
skladu z 2. Newtonovim zakonom.

72
3.6 Težišče sistema masnih točk in težišče togega
telesa
Tudi tokrat bomo najprej zapisali vsoto gibalnih količin masnih točk, ki je enaka
gibalni količini sistema masnih točk (enačba 3.37):
vmvmi i
iii
rr
∑ ∑
= ,
le da bomo uporabili definicijo za hitrost dt
rdv i
i
r
r = oziroma dt
rdv
r
r = in jo vstavili v
enačbo 3.37:
dt
rdm
dt
rdm
ii
i
ii
rr
= ∑∑ ,
kjer z irr
označimo krajevni vektor i-te točke in z rr
skupni krajevni vektor sistema
masnih točk. Ker se mase in skupna masa sistema s časom ne spreminjajo, dobimo:
=
∑∑ rm
dt
drm
dt
d
ii
iii
rr
,
iz česar sledi, da je:
rmrmi
ii
ii
rr
= ∑∑ . (3.39)
Enačba 3.39 pravi, da je vsota produktov mas posameznih točk z njihovim
krajevnim vektorjem enaka produktu skupne mase in skupnega krajevnega
vektorja. Skupni krajevni vektor sistema masnih točk predstavlja težišče sistema in
ga simbolično označimo z trr
:
∑∑
=i
ii
ii
t rmm
rrr 1
. (3.40)

73
Za definiranje težišča telesa togega telesa le-to razdelimo na neskončno majhne
mase dm. Če postopek ponovimo za neskončno majhne mase, dobimo, da je težišče
togega telesa definirano kot:
∫= dmrm
rt
rr 1, (3.41)
kjer so meje integrala postavljene tako, da integriramo po vsem volumnu telesa.
Ugotovimo, da je težišče telesa oziroma težišče sistema masnih točk tista točka, ki
se vede v skladu z 2. Newtonovim zakonom kot smo ga opisali v poglavju 3.5
(enačba 3.38). Torej, vsota vseh sil, ki delujejo na določeno telo oz. na sistem
masnih točk, bo povzročila, da se bo težišče telesa oz. sistema z maso m gibalo s
pospeškom ar
.
Primer: izračunaj težišče človeškega telesa v dvodimenzionalnem sistemu, če
predpostavimo, da lahko telo opišemo s štirimi segmenti, kot prikazuje slika 3.6.1.
Segmente obravnavamo kot toga telesa, za katere poznamo njihova težišča.
Slika 3.6.1: Človeško telo, razdeljeno na štiri segmente z masami in koordinatami
točk
Enačbo 3.4 zapišemo za vsako koordinato posebej in upoštevamo, da je m = m1+
m2+ m3+ m4:

74
( )
( )
01
11
11
44332211
44332211
==
+++==
+++==
∑∑
∑∑
∑∑
iii
ii
t
iii
ii
t
iii
ii
t
zmm
z
ymymymymm
ymm
y
xmxmxmxmm
xmm
x
.
Ker obravnavamo sistem v dveh dimenzijah, je položaj težišča v smeri z enak nič.

75
3.7 Navorinvztrajnostnimomenttočkastegatelesa
Za primer obravnavajmo točkasto telo, ki pospešeno kroži po krožnici s polmerom
r. Vsoto vseh sil, ki delujejo na telo, lahko po 2. Newtonovem zakonu zapišemo z
radialno in tangencialno komponento (enačba 3.22):
( )tr aamFrr
r
+=∑ .
Vsoto vseh sil lahko tako na enak način zapišemo kot vsoto vseh sil v radialni in
tangencialni smeri:
rt FFFrrr
+=∑ . (3.37)
Radij vektor od središča kroženja do telesa, ki kroži, označimo z rr
in imenujmo
ročica. Če silo z leve strani vektorsko pomnožimo z ročico, dobimo fizikalno
količino, ki jo imenujemo navor in ga označimo z Mr
. Če po opisanem postopku
enačbo 3.37 vektorsko pomnožimo z ročico, dobimo:
tFrFrMr
r
r
r
r
×=×= , (3.38)
saj je vektorski produkt dveh vzporednih vektorjev enak nič:
0=× rFrr
r
.
Ugotovimo, da navor povzročijo le sile, ki delujejo v tangencialni smeri, sile v
radialni smeri pa ne. Velikost navora iz vektorskega produkta lahko zapišemo kot
produkt sile, ročice in sinusa vmesnega kota:
( )φsinrFM =r
. (3.39)
Enota za navor je [Nm].
Še enkrat uporabimo 2. Newtonov zakon (enačba 3.22) in ga vstavimo v enačbo
3.38:
αrrr
r
r
r
2mrarmFrM tt =×=×= . (3.40)
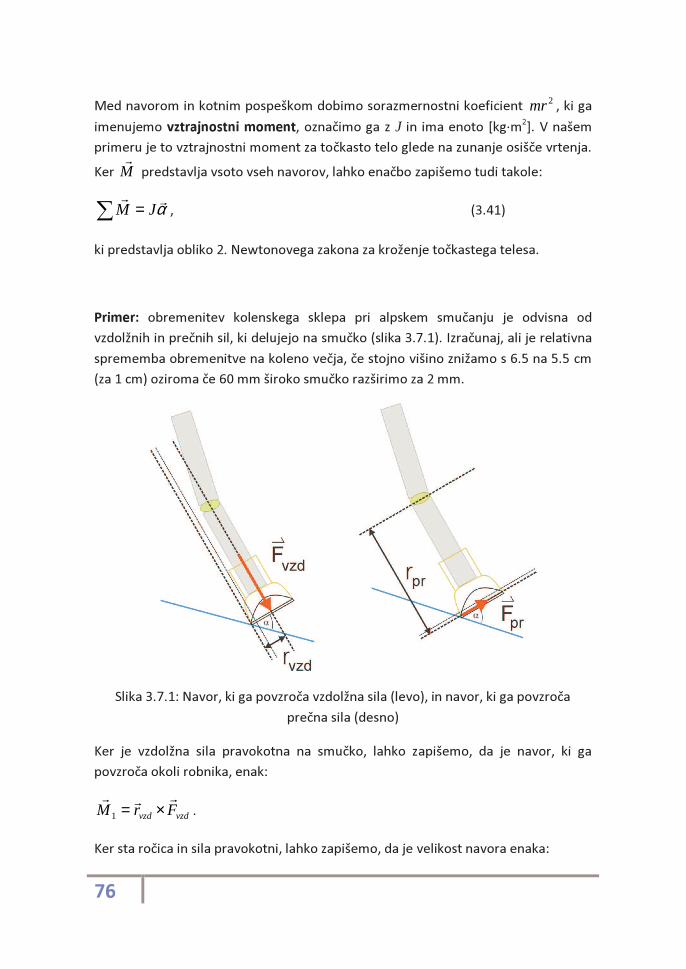
76
Med navorom in kotnim pospeškom dobimo sorazmernostni koeficient 2mr , ki ga
imenujemo vztrajnostni moment, označimo ga z J in ima enoto [kg·m2]. V našem
primeru je to vztrajnostni moment za točkasto telo glede na zunanje osišče vrtenja.
Ker Mr
predstavlja vsoto vseh navorov, lahko enačbo zapišemo tudi takole:
αrr
JM =∑ , (3.41)
ki predstavlja obliko 2. Newtonovega zakona za kroženje točkastega telesa.
Primer: obremenitev kolenskega sklepa pri alpskem smučanju je odvisna od
vzdolžnih in prečnih sil, ki delujejo na smučko (slika 3.7.1). Izračunaj, ali je relativna
sprememba obremenitve na koleno večja, če stojno višino znižamo s 6.5 na 5.5 cm
(za 1 cm) oziroma če 60 mm široko smučko razširimo za 2 mm.
Slika 3.7.1: Navor, ki ga povzroča vzdolžna sila (levo), in navor, ki ga povzroča
prečna sila (desno)
Ker je vzdolžna sila pravokotna na smučko, lahko zapišemo, da je navor, ki ga
povzroča okoli robnika, enak:
vzdvzd FrMr
r
r
×=1 .
Ker sta ročica in sila pravokotni, lahko zapišemo, da je velikost navora enaka:

77
vzdvzd FrM =1 .
Ker je ročica v tem primeru le polovica širine smučke, je ročica enaka 30 mm oz. se
s spremembo poveča za 1 mm. Razmerje med novim in starim navorom je tako:
033.130
31''
1
1 ===mm
mm
Fr
Fr
M
M
vzdvzd
vzdvzd ,
kjer je M1' navor po spremembi. Relativna sprememba je 3.3 % pri enako veliki
vzdolžni sili.
Na enak način lahko izračunamo tudi za navore prečnih sil:
prpr FrM =2 .
Zavedati pa se moramo, da ročica zdaj ni odvisna le od stojne višine smučke, ampak
tudi od dolžine goleni. Če vzamemo, da je golen dolga 45 cm, dobimo razmerje:
981.05.645
5.545''
2
2 =++==
cmcm
cmcm
Fr
Fr
M
M
prpr
prpr,
Kar znese 1.9 % relativne spremembe. Ugotovimo, da razmeroma majhna
sprememba širine smuči bolj vpliva na relativno obremenitev kolena kot
razmeroma velika sprememba stojne višine. Po drugi strani moramo imeti še v
mislih, da so vzdolžne sile pri smučanju za nekaj velikostnih razredov višje od
prečnih, ročice pa so pri vzdolžnih silah približno 15-krat manjše.

78
3.8 Vrtenje togega telesa okoli nepremične osi
Začnimo s sistemom dveh točkastih teles, ki sta od nepremične osi odmaknjeni za
1rr
in 2rr
. Prvo deluje na drugo s silo 12Fr
, drugo na prvo pa s silo 21Fr
(glej sliko
3.8.1). Iz tega sledi, da je vsota obeh navorov notranjih sil:
21212121 FrFrMMr
r
r
r
rr
×+×=+ ,
Po 3. Newtonovem zakonu velja 2112 FFrr
−= , zato dobimo:
( ) 0122112212121 =×−=×−×=+ FrrFrFrMMr
rr
r
r
r
r
rr
. (3.42)
Ker je razlika krajevnih vektorjev vzporedna s 12Fr
, je vsota obeh navorov enaka nič.
Slika 3.8.1: Notranji navori sistema dveh točkastih teles kot posledica delovanja
notranjih sil
Tudi če zapišemo vsoto notranjih navorov za sistem več masnih točk, je vsota
notranjih navorov enaka nič, saj navori vedno nastopajo v parih, ki se med seboj
odštejejo.
Zamislimo si togo telo, ki je sestavljeno iz neskončnega števila neskončno majhnih
delov, ki jih obravnavamo kot točkasta telesa. Tudi pri togem telesu pridemo do
spoznanja, da je vsota vseh notranjih navorov enaka nič. S temi ugotovitvami
zapišimo vsoto vseh navorov Mdr
za delček togega telesa z maso dm, ki je od
nepremične osi odmaknjeno za ročico rr
(glej tudi sliko 3.8.2):
dmrMd 2αrr
= . (3.43)
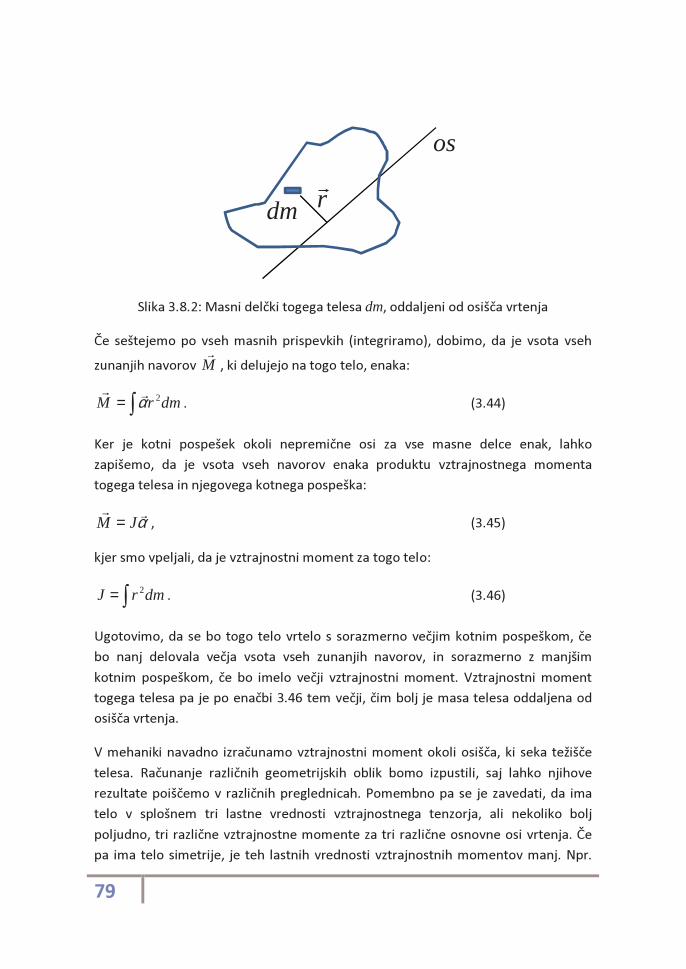
79
Slika 3.8.2: Masni delčki togega telesa dm, oddaljeni od osišča vrtenja
Če seštejemo po vseh masnih prispevkih (integriramo), dobimo, da je vsota vseh
zunanjih navorov Mr
, ki delujejo na togo telo, enaka:
dmrM ∫= 2αrr
. (3.44)
Ker je kotni pospešek okoli nepremične osi za vse masne delce enak, lahko
zapišemo, da je vsota vseh navorov enaka produktu vztrajnostnega momenta
togega telesa in njegovega kotnega pospeška:
αrr
JM = , (3.45)
kjer smo vpeljali, da je vztrajnostni moment za togo telo:
dmrJ ∫= 2 . (3.46)
Ugotovimo, da se bo togo telo vrtelo s sorazmerno večjim kotnim pospeškom, če
bo nanj delovala večja vsota vseh zunanjih navorov, in sorazmerno z manjšim
kotnim pospeškom, če bo imelo večji vztrajnostni moment. Vztrajnostni moment
togega telesa pa je po enačbi 3.46 tem večji, čim bolj je masa telesa oddaljena od
osišča vrtenja.
V mehaniki navadno izračunamo vztrajnostni moment okoli osišča, ki seka težišče
telesa. Računanje različnih geometrijskih oblik bomo izpustili, saj lahko njihove
rezultate poiščemo v različnih preglednicah. Pomembno pa se je zavedati, da ima
telo v splošnem tri lastne vrednosti vztrajnostnega tenzorja, ali nekoliko bolj
poljudno, tri različne vztrajnostne momente za tri različne osnovne osi vrtenja. Če
pa ima telo simetrije, je teh lastnih vrednosti vztrajnostnih momentov manj. Npr.
rr
os
dm

80
krogla (žoga), ki je sferno simetrična, ima le eno lastno vrednost vztrajnostnih
momentov, valj (palica) pa dve (okoli vzdolžne in okoli prečne osi).
Pri obravnavi človeka imamo vztrajnostne momente, ki so različni za različne
rotacije. Npr. podlaket ima tri vztrajnostne momente: prvega, kadar prihaja do
upogibanja in iztegovanja v komolcu, drugega pri odmikanju in primikanju in
tretjega pri notranji in zunanji rotaciji.
Pomembna ugotovitev je tudi, da so vztrajnostni momenti teles okoli nepremične
osi aditivni. To pomeni, da jih lahko preprosto seštevamo. Če imamo metalca
kladiva, ki se vrti okoli stalne nepremične osi, in poznamo vztrajnostni moment
metalca Jm in kladiva Jk, ju lahko preprosto seštejemo:
kmskupni JJJ += .
Primer: drsalka se vrti okoli svoje navpične vzdolžne osi. Ali ima večji vztrajnostni
moment, ko ima roke priročene ali odročene?
Če ima roke odročene in se vrti okoli svoje navpične osi, so masni deli roke bolj
oddaljeni od osišča vrtenja kot v primeru, ko ima roke odročene. Zato je
vztrajnostni moment večji.
3.9 Steinerjevizrek
Mnogokrat nas pri računanju v kineziologiji zanimajo primeri, kjer se telo ali deli
teles ne vrtijo okoli osi, ki gre skozi težišče obravnavanega telesa. V teh primerih
telo obravnavamo tako, da os koordinatnega sistema, okoli katere kroži, vzporedno
prestavimo v težišče sistema. S kratkim računom, ki presega naše zanimanje, lahko
pokažemo, da je rezultat vztrajnostni moment J, ki je sestavljen iz vztrajnostnega
momenta okoli lastne težiščne osi J* in vztrajnostnega momenta težiščne točke
okoli nepremične osi mr2:
2* mrJJ += . (3.46)
To ugotovitev po švicarskem matematiku imenujemo Steinerjev izrek.
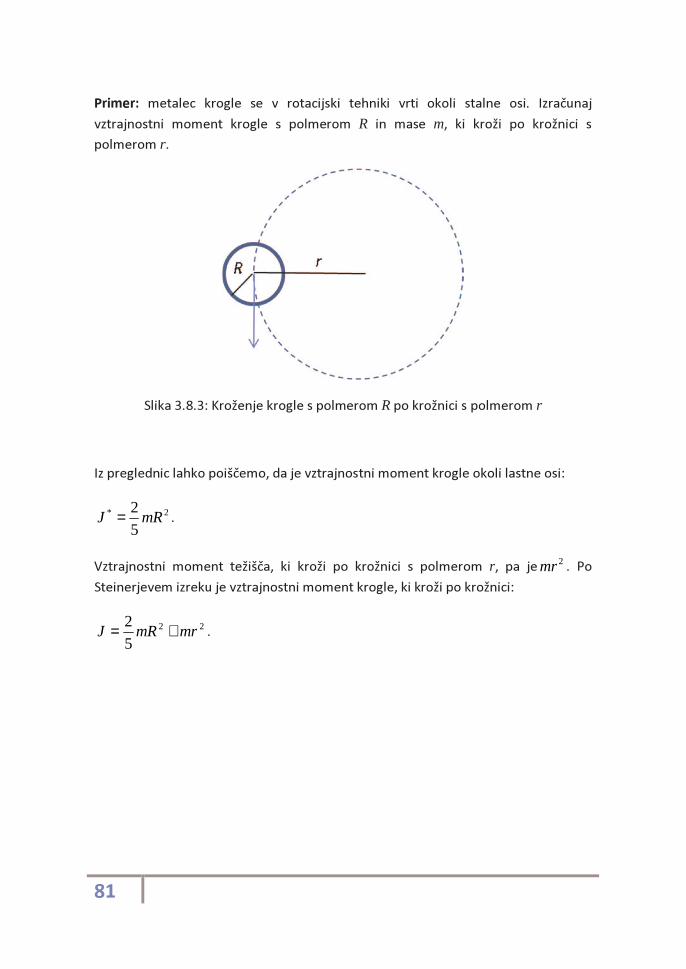
81
Primer: metalec krogle se v rotacijski tehniki vrti okoli stalne osi. Izračunaj
vztrajnostni moment krogle s polmerom R in mase m, ki kroži po krožnici s
polmerom r.
Slika 3.8.3: Kroženje krogle s polmerom R po krožnici s polmerom r
Iz preglednic lahko poiščemo, da je vztrajnostni moment krogle okoli lastne osi:
2*
5
2mRJ = .
Vztrajnostni moment težišča, ki kroži po krožnici s polmerom r, pa je 2mr . Po
Steinerjevem izreku je vztrajnostni moment krogle, ki kroži po krožnici:
22
5
2mrmRJ += .

82
3.10 Suneknavorainvrtilnakoličina
Z enačbo 3.41 so zapisali obliko 2. Newtonovega zakona za kroženje točkastega
telesa:
αrr
JM =∑ .
Kotni pospešek zapišimo kot odvod kotne hitrosti po času in hkrati zaradi
poenostavitve pisanja zamenjajmo ∑= MMrr
:
dt
dJM
ωrr
= . (3.47)
Če obe strani enačbe 3.47 integriramo po času, dobimo:
12 ωωω rr
r
r
JJdtdt
JdtM −== ∫∫ . (3.48)
Levo stran enačbe ∫ dtMr
imenujemo sunek navora, na desni strani pa produkt
vztrajnostnega momenta in kotne hitrosti ωrJ imenujemo vrtilna količina, ki jo
označimo z Γr
. Indeks 2 pri kotni hitrosti pomeni končno hitrost in indeks 1
začetno. Dobimo izrek, ki pravi, da je vsota vseh sunkov navora enaka spremembi
vrtilne količine:
12 Γ−Γ=∫rrr
dtM . (3.49)
Vrtilna količina ima pri kroženju podobno vlogo kot gibalna količina pri premem
gibanju. Razlikuje se v tem, da se vrtilna količina spremeni, kadar imamo zunanji
sunek navora različen od nič, torej potrebujemo ekscentrične sile. Po drugi strani
pa velja, da kadar je vsota zunanjih sunkov navorov enaka nič, se vrtilna količina
ohrani:
120 Γ=Γ⇒=∫rrr
dtM . (3.50)
Temu pravimo izrek o ohranitvi vrtilne količine.
Kadar na telo delujejo navori, ki se s časom ne spreminjajo, lahko enačbi 3.49 in
3.50 zapišemo v obliki:
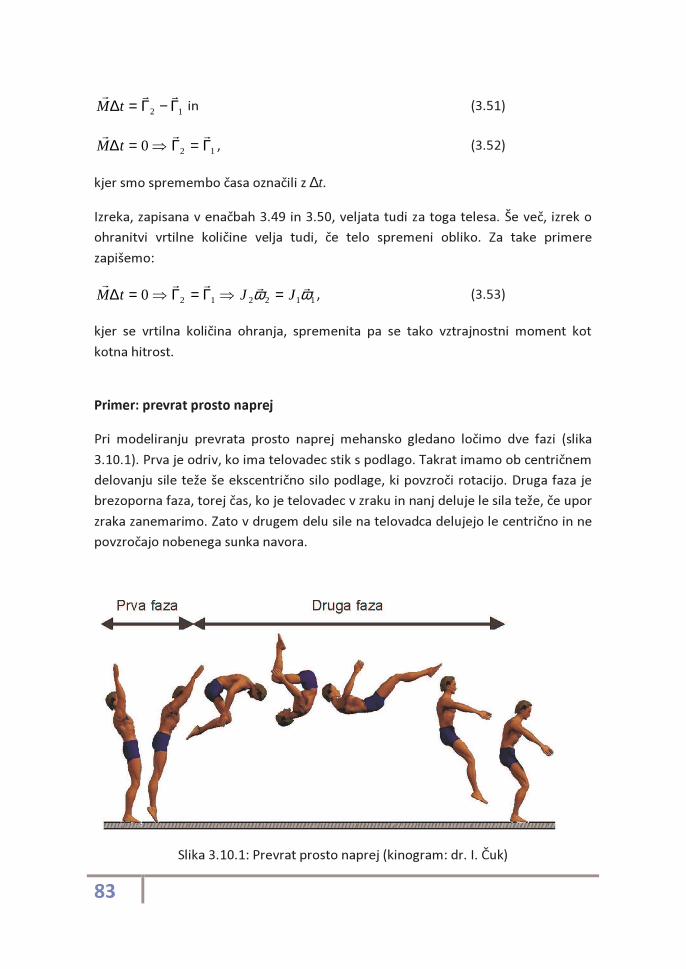
83
12 Γ−Γ=∆rrr
tM in (3.51)
120 Γ=Γ⇒=∆rrr
tM , (3.52)
kjer smo spremembo časa označili z ∆t.
Izreka, zapisana v enačbah 3.49 in 3.50, veljata tudi za toga telesa. Še več, izrek o
ohranitvi vrtilne količine velja tudi, če telo spremeni obliko. Za take primere
zapišemo:
1122120 ωω rr
rrr
JJtM =⇒Γ=Γ⇒=∆ , (3.53)
kjer se vrtilna količina ohranja, spremenita pa se tako vztrajnostni moment kot
kotna hitrost.
Primer: prevrat prosto naprej
Pri modeliranju prevrata prosto naprej mehansko gledano ločimo dve fazi (slika
3.10.1). Prva je odriv, ko ima telovadec stik s podlago. Takrat imamo ob centričnem
delovanju sile teže še ekscentrično silo podlage, ki povzroči rotacijo. Druga faza je
brezoporna faza, torej čas, ko je telovadec v zraku in nanj deluje le sila teže, če upor
zraka zanemarimo. Zato v drugem delu sile na telovadca delujejo le centrično in ne
povzročajo nobenega sunka navora.
Slika 3.10.1: Prevrat prosto naprej (kinogram: dr. I. Čuk)

84
Opomba: če bi tudi v prvi fazi sile delovale le centrično, bi se telovadec gibal le
translatorno, brez rotacije.
Prva faza – stik s podlago
Sunek sile je enak spremembi gibalne količine:
( ) ( )01 tvmtvmdtFrr
r
−=∫ ,
kjer smo čas začetka odriva označili s t0, čas konca odriva, ki je hkrati tudi začetek
brezoporne faze, s t1. Sili, ki delujeta na telo pa sta sili podlage in teže:
gp FFFrrr
+= .
V navpični smeri delujeta sila teže in sila podlage, zato je vertikalna hitrost:
∫ −−= )(1
010 ttgdtFm
v zz ,
kjer je ∫ dtFz sunek sile podlage v navpični smeri, ki ga izmerimo s pomočjo
pritiskovne plošče.
V vodoravni smeri pa deluje le sila podlage, zato je vodoravna hitrost:
∫= dtFm
v xx
10 ,
kjer je ∫ dtFx sunek sile podlage v vodoravni smeri, ki ga ravno tako izmerimo s
pomočjo pritiskovne plošče.
Navor ob odrivu povzroča le sila podlage, ki je ekscentrična, sila teže pa je
centrična. Sunek navora sile podlage tako povzroči spremembo vrtilne količine:
( ) ( ) ( )01 tJtJdtFrdtM p ωω rr
r
r
r
−=×=∫ ∫ ,
kjer je J vztrajnostni moment telesa. Iz vektorskega produkta dobimo navor, ki kaže
le v osi y – to je os, ki je pravokotna na sagitalno ravnino človeka:
( ) ( ) ( )010,,0 tJtJdtxFzF zx ωω rr
−=−∫

85
oziroma
( ) ( )01 tJtJdtM yyy ωω −=∫ .
Če poznamo sunek navora, lahko izračunamo kotno hitrost vrtenja telesa ob času t1,
( )J
dtMt
y
y∫=1ω ,
če je kotna hitrost ob času t0, enaka nič ( ) 00 =tyω .
Druga faza – faza leta
Iz navpične hitrosti lahko s pomočjo enačbe 2.15 izračunamo čas leta v brezoporni
fazi:
g
vz2=τ ,
ob predpostavki, da je težišče telesa ob koncu odriva na enaki višini kot v trenutku
pristanka po izvedbi prevrata prosto naprej.
Ker smo izračunali sunek navora in izpeljali enačbo za kotno hitrost vrtenja
( )J
dtMt
y
y∫=1ω , je zasuk telesa v zraku enak produktu časa leta in kotne hitrosti:
( )τωφ 1ty= .
Številski primer
Vzemimo, da ima telovadec maso m = 75 kg ter se odrine s sunkom sile
NsdtFz 320∫ = in sunkom navora ∫ −= NmsdtM y 96 .
Iz podatkov izračunamo vertikalno hitrost:
s/m7.2)tt(gdtFm1
v 01zz0 =−−= ∫

86
in čas leta
sg
v z 55.00 ==τ .
Vzemimo, da bi imel v iztegnjenem položaju vztrajnostni moment 25.16 kgmJ = .
Potem bi bila kotna hitrost vrtenja:
18.5 −−== ∫ sJ
dtM y
yω
in kot zasuka pri prevratu prosto naprej:
)183(2.3 °−−== radyτωφ .
V zraku bi se zavrtel le za polovico obrata.
Če bi bil telovadec v pokrčenem položaju z vztrajnostnim momentom 22.6 kgmJ =
, bi bila njegova kotna hitrost vrtenja:
1y
y s33.22J
dtM−−==ω ∫
in kot zasuka:
)704(28.12 °−−== radyτωφ ,
kar predstavlja skoraj dva obrata. V praksi ves čas prevrata prosto naprej telovadec
ni niti pokrčen niti iztegnjen. Če bi položaj spreminjal v pravem razmerju, bi se
lahko zavrtel ravno za en obrat in uspešno izvedel prevrat prosto naprej.
Primer: modeliranje drsalke
Drsalko mase m = 55 kg in višine h = 170 cm lahko enostavno mehansko
modeliramo s homogenimi valji. Glavni pokončni valj je trup drsalke, dva manjša
valja pa predstavljata dve roki, ki sta najprej ob telesu, nato se odročita (slika
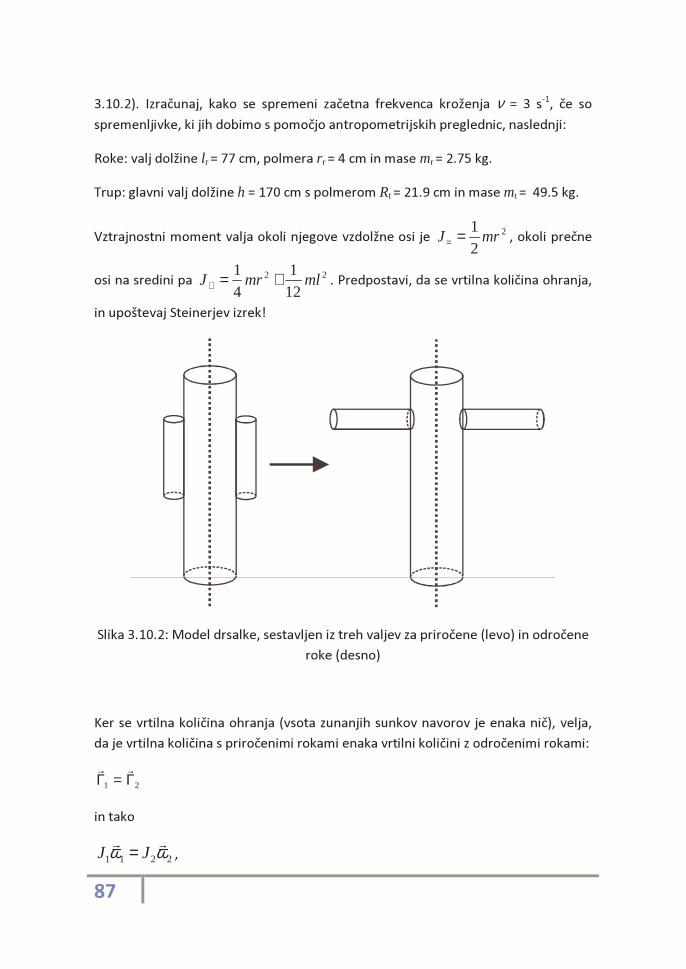
87
3.10.2). Izračunaj, kako se spremeni začetna frekvenca kroženja ν = 3 s-1, če so
spremenljivke, ki jih dobimo s pomočjo antropometrijskih preglednic, naslednji:
Roke: valj dolžine lr = 77 cm, polmera rr = 4 cm in mase mr = 2.75 kg.
Trup: glavni valj dolžine h = 170 cm s polmerom Rt = 21.9 cm in mase mt = 49.5 kg.
Vztrajnostni moment valja okoli njegove vzdolžne osi je 2
21
mrJ == , okoli prečne
osi na sredini pa 22
121
41
mlmrJ +=⊥ . Predpostavi, da se vrtilna količina ohranja,
in upoštevaj Steinerjev izrek!
Slika 3.10.2: Model drsalke, sestavljen iz treh valjev za priročene (levo) in odročene
roke (desno)
Ker se vrtilna količina ohranja (vsota zunanjih sunkov navorov je enaka nič), velja,
da je vrtilna količina s priročenimi rokami enaka vrtilni količini z odročenimi rokami:
21 Γ=Γrr
in tako
2211 ωω rr
JJ = ,

88
kjer indeks 1 predstavlja dogajanje s priročenimi, indeks 2 pa z odročenimi rokami.
Vrtenje opazujemo le okoli vzdolžne osi z, zato lahko enačbo zapišemo kot:
2211 ωω JJ =
oziroma
2211 22 πνπν JJ = ,
kjer upoštevamo vztrajnostne momente in kotne hitrosti le okoli osi z.
Sedaj pa zapišimo vztrajnostni moment za velik valj (trup), ki je v obeh primerih
enak:
2
2
1ttvel RmJ = .
Za vztrajnostni moment malih valjev (roke) uporabimo Steinerjev izrek, ker se
težišče valja vrti okoli zunanje osi (osi skozi sredino trupa), ob tem pa še okoli lastne
osi. Najprej za priročene roke:
( ) ( ) 22,
*21, 2
1rrrtrmalirtrmali rmrRmJrRmJ ++=++= = ,
kjer se tudi majhna valja (roki) vrtita okoli vzdolžne osi, težišče pa kroži s polmerom
(Rt + rt). Zdaj zapišimo vztrajnostni moment še za odročene roke, kjer se majhna
valja vrtita okoli prečne osi:
222
,*
2
2, 12
1
4
1
22 rrrrr
trmalir
trmali lmrml
RmJl
RmJ ++
+=+
+= ⊥
,
kjer majhni valji krožijo po polmeru
+2r
t
lR .
Skupni vztrajnostni moment telesa s priročenimi rokami je tako:
( ) 2221,1 2
2
12 rrrtrttmalivel rmrRmRmJJJ +++=+= ,
z odročenimi pa:

89
222
22,2 6
1
2
1
22
2
12 rrrr
rtrttmalivel lmrm
lRmRmJJJ ++
++=+= .
Opomba: upoštevali smo, da imamo dve roki, torej dva majhna valja.
Iz ohranitve vrtilne količine lahko zapišemo končno frekvenco kroženja:
2
11
2
112 2
2J
J
J
J νπ
πνν ==
kamor vstavimo vztrajnostne momente:
( )
222
2
1222
2
61
21
22
21
221
rrrrr
trtt
rrrtrtt
lmrml
RmRm
rmrRmRm
++
++
+++=
νν .

90
3.11 Mehanskodeloinenergija
Pri izreku o sunku sile smo se zanimali za časovni potek delovanja sile na telo, pri
opazovanju gibanja pa nas mnogokrat zanima, kako sila deluje na določeni poti.
Takrat govorimo o delu sile, ki ga definiramo kot skalarni produkt sile Fr
in premika
njenega prijemališča sr
:
sFAr
r
⋅= , (3.54)
kadar se sila ne spreminja. Kadar pa se sila s krajem spreminja, z integralom
seštejemo vse majhne prispevke:
∫ ⋅= sdFAr
r
. (3.55)
Enota za delo je »joule« [J] (1 J = 1 Nm = 1 kg m2 / s2).
Kadar sta sila in premik vzporedna, je delo, torej skalarni produkt, kar enak
navadnemu množenju velikosti sile in premika. Previdno je treba ravnati le s
smermi, saj je mehansko delo oz. delo sile negativno, če sta sila in premik
nasprotno usmerjana. Po drugi strani je delo vedno enako nič, kadar sta sila in
premik pravokotna eden na drugega, kar je posledica skalarnega produkta.
Primer: koliko mehanskega dela opravi planinec, če nosi nahrbtnik z maso m po
vodoravni poti? Koliko pa takrat, ko nahrbtnik iz doline prinese na vrh Triglava in ob
tem premaga višinsko razliko h?
Sila, s katero planinec opravlja delo, je po 3. Newtonovem zakonu nasprotno enaka
sili teže nahrbtnika. Ker sila teže deluje navpično navzdol, planinec na nahrbtnik
deluje navpično navzgor. Zato je v prvem primeru delo sile planinca enako nič, saj je
premik po vodoravni poti pravokoten na silo. V drugem primeru pa je delo sile
enako:
hFsFsFA nahrbtnikgnahrbtnikgplaninev ,, =−== r
r
r
r
,
ker je skalarni produkt sile teže in premika enak produktu velikosti sile in višinske
razlike. Pozitiven predznak je posledica tega, da je sila teže nahrbtnika obrnjena
navzdol in s tem sila planinca navzgor, kar je enako kot premik.

91
3.11.1 Potencialna energija
Pri gibanju v športu imamo največkrat opraviti s silo teže gFr
. Zato za začetek
izračunajmo njeno delo, ki ga opravi na težišče telesa:
∫∫ ⋅=⋅= sdgmsdFA g
rrr
r
. (3.56)
Če kot φ opisuje kot med premikom in navpično smerjo navzdol, kamor kaže
gravitacijski pospešek gr
, potem velja: ( ) dzds =− φcos , kar predstavlja projekcijo
premika na smer gravitacijskega pospeška. Dobimo, da je:
( ) ( )12cos zzmgdzmgdsmgsdgmA −==−=⋅= ∫∫∫ φrr
, (3.57)
kjer je z2 končna, z1 pa začetna višina težišča telesa.
Delo sile teže imenujemo sprememba potencialne energije:
( )12 zzmgW p −=∆ , (3.58)
ki ni odvisna od poti, temveč le od začetne in končne višine težišča telesa glede na
izbrano izhodišče. Produkt mase telesa, težnostnega pospeška in višine pa je
potencialna energija:
mgzW p = . (3.59)
Tudi za energijo uporabljamo enoto [J].
3.11.2 Kinetična energija pri translatornem gibanju
Za določitev kinetične energije ravnamo podobno kot pri potencialni energiji. Le da
tokrat začnemo pri 2. Newtonovem zakonu in obravnavamo telo, ki se giblje
pospešeno. Vsota vseh sil Fr
, ki delujejo na telo, je enaka produktu mase in
pospeška:
amFr
r
= .

92
Opravljeno delo sil na telo je tako:
∫∫ ⋅=⋅= sdamsdFArrr
r
. (3.60)
Pospešek po osnovni definiciji zapišemo kot dt
vda
r
r = in dobimo:
∫∫∫ −=⋅=⋅=⋅= 21
22 2
1
2
1mvmvvdvm
dt
sdvmdsd
dt
vdmA
rr
r
rr
r
, (3.61)
kjer je v2 končna, v1 pa začetna hitrost težišča telesa.
Opravljeno delo predstavlja spremembo kinetične energije:
21
22 2
1
2
1mvmvWk −=∆ , (3.62)
ki ni odvisna od tega, kako hitro telo pospešuje oziroma zavira. Produkt:
2
2
1mvWk = (3.63)
pa imenujemo kinetična energija.
Primer: kako visoka bo hitrost gibanja težišča telesa atleta v vertikalni smeri, če se
mu pri skoku v višino za prečko težišče telesa najvišje do najnižje točke spusti za
višino h = 2 m? Predpostavi, da je upor zraka zanemarljiv, in upoštevaj, da je hitrost
v najvišji točki enaka nič.
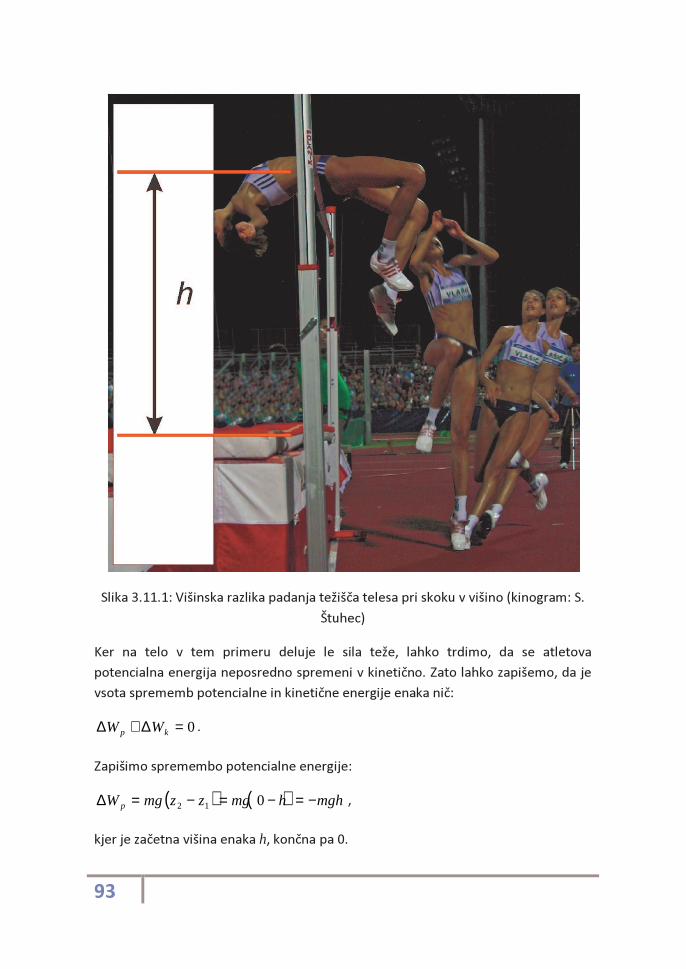
93
Slika 3.11.1: Višinska razlika padanja težišča telesa pri skoku v višino (kinogram: S.
Štuhec)
Ker na telo v tem primeru deluje le sila teže, lahko trdimo, da se atletova
potencialna energija neposredno spremeni v kinetično. Zato lahko zapišemo, da je
vsota sprememb potencialne in kinetične energije enaka nič:
0=∆+∆ kp WW .
Zapišimo spremembo potencialne energije:
( ) ( ) mghhmgzzmgW p −=−=−=∆ 012 ,
kjer je začetna višina enaka h, končna pa 0.

94
Sprememba kinetične energije pa je:
22
22
21
22 2
10
2
1
2
1
2
1mvmvmvmvWk =−=−=∆ ,
ker je hitrost 01 =v .
Dobimo:
02
1 22 =+−=∆+∆ mvmghWW kp ,
Iz tega sledi, da je hitrost ob pristanku:
smghv /32.622 == .
3.11.3 Kinetična energija pri kroženju točkastega telesa
Pri kroženju točkastega telesa lahko zapišemo, da je mehansko delo vsote vseh sil:
∫ ⋅= sdFAr
r
.
Če vsoto vseh sil razdelimo na tangencialno in radialno smer, ugotovimo, da je delo
radialnih sil enako nič, saj sta premik in sila vedno pravokotna drug na drugega.
Zato delo povzročajo le tangencialne sile tFr
:
( ) ∫∫∫ ⋅=⋅+=⋅= sdFsdFFsdFA ttr
r
r
r
rr
r
r
. (3.64)
Ker sta vektorja sdr
in tFr
vedno vzporedna, lahko zapišemo delo:
∫= dsFA t . (3.65)
Ker je pri kroženju φrdds = in MrFt = :
∫∫ == φφ MdrdFA t (3.66)
95
ter αJM = , lahko izpeljemo:
21
22 2
1
2
1 ωω
ωωωωφωφα
JJ
dJdtdt
dJd
dt
dJdJA
−=
===== ∫∫∫∫, (3.67)
kjer rezultat predstavlja spremembo kinetične energije za kroženje točkastega
telesa:
21
22 2
1
2
1 ωω JJWkr −=∆ , (3.68)
kar imenujemo sprememba kinetične rotacijske energije, produkt:
2
2
1 ωJWkr = (3.69)
pa kinetična rotacijska energija.
3.11.4 Kinetična energija rotirajočega telesa
Do kinetične energije togega telesa, ki se vrti s kotno hitrostjo ω okrog nepremične
osi, pridemo takole: telo razdelimo na majhne masne elemente dm, od katerih vsak
kroži z enako kotno hitrostjo in po polmeru r. Zato ima vsak masni element obodno
hitrost rv ω= in kinetično energijo:
( )22
22
rdm
vdmdWk
ω== . (3.70)
Za kinetično energijo celotnega togega telesa moramo vse masne delce sešteti:
( )∫∫ == dmr
rdmWk
222
22
ωω, (3.71)

96
kjer vemo, da je Jdmr =∫2 vztrajnostni moment telesa. Tako dobimo kinetično
energijo rotirajočega telesa, ki jo imenujemo rotacijska kinetična energija in jo
označimo z:
2
2
1 ωJWkr = . (3.72)
Kadar imamo telo, ki se vrti okoli lastne osi in se hkrati premika tudi translatorno,
ima tako kinetično rotacijsko kot tudi kinetično translacijsko energijo:
22
2
1
2
1mvJWWW ktkrk +=+= ω , (3.73)
kjer kinetična translacijska energija opisuje energijo gibanja težišča telesa.
3.11.5 Prožnostna energija
Obravnavajmo telo, ki se brez trenja giblje po podlagi in je na eni strani pripeto na
vzmet s prožnostnim koeficientom k. Delo sile prožnosti vzmeti prFr
zapišemo kot:
21
22 2
121
kskssdsksdFA pr −=⋅=⋅= ∫∫rrr
r
, (3.74)
kjer smo silo prožnosti zapisali kot skFpr
r
r
= (glej poglavje 3.2.3), s1 in s1 pa sta
začetni in končni odmik od nenapete vzmeti. Na desni strani smo dobili spremembo
prožnostne energije:
21
22 2
121
ksksWpr −=∆ . (3.75)
Produkt:
2
21
ksWpr = , (3.76)
pa imenujemo prožnostna energija.
97
3.11.6 Izrek o ohranitvi mehanske energije
Na telo lahko v splošnem delujejo konzervativne in nekonzervativne sile.
Konzervativne so tiste, pri katerih je delo na zaključeni poti enako nič. Npr. delo sile
teže je enako nič, če telo dvignemo in ga nato spustimo nazaj na enako višino. Po
drugi strani pa lahko delujejo še nekonzervativne sile, katerih delo na zaključeni
poti ni enako nič. Taki sili sta npr. sili upora in trenja. Kadar na telo ne delujejo
nekozervativne sile oziroma je vsota nekozervativnih sil enaka nič:
0. =∑ silnekonA , (3.77)
velja, da se vsota kinetične, potencialne in prožnostne energije telesa ohranja:
.,,
konstWprpki
i =∑=
(3.78)
To pomeni, da se energije med seboj pretvarjajo ena v drugo. Če pri smuku
smučarja naravnost po klancu navzdol zanemarimo upor in trenje, se bo
potencialna energija neposredno pretvarjala v kinetično. Vsota obeh energij pa bo v
vsakem trenutku enaka. Po drugi strani to pomeni, da je vsota sprememb
potencialne in kinetične energije enaka nič. Bolj splošno lahko zapišemo, da je
vsota sprememb posameznih energij enaka nič:
0=∆+∆+∆ prpk WWW , (3.79)
če velja, da je vsota nekonzervativnih sil enaka nič.
Primer: veletoč
Telovadec izvaja veletoč na drogu (slika 3.11.2). Na vrhu ima kotno hitrost ω0.
Izračunaj, kako se kotna hitrost spreminja med izvajanjem veletoča, če zanemarimo
silo upora zraka in trenja med rokami in drogom.
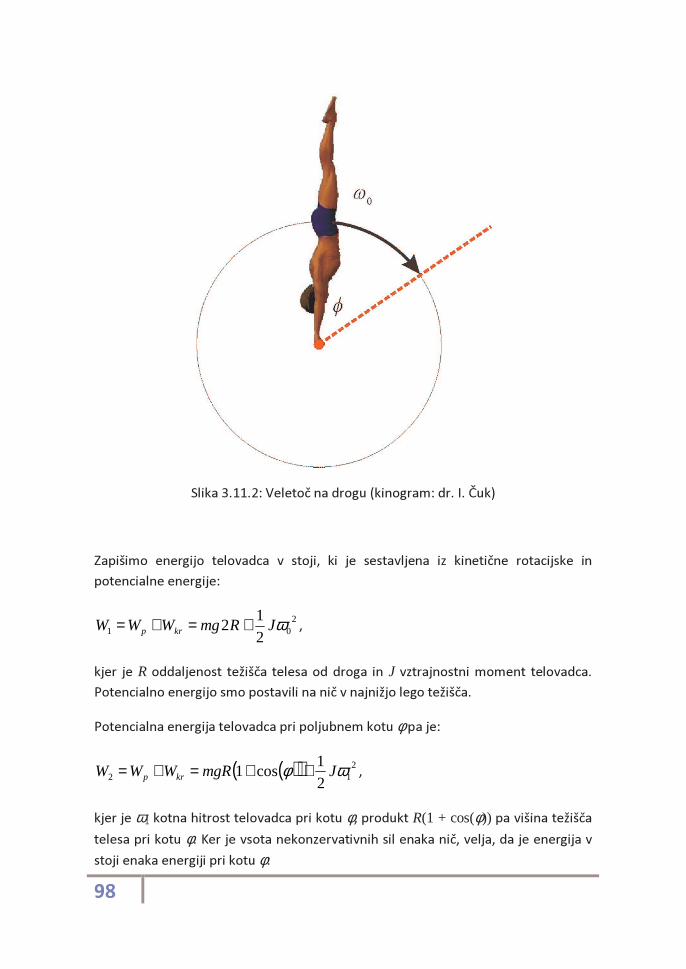
98
Slika 3.11.2: Veletoč na drogu (kinogram: dr. I. Čuk)
Zapišimo energijo telovadca v stoji, ki je sestavljena iz kinetične rotacijske in
potencialne energije:
201 2
12 ωJRmgWWW krp +=+= ,
kjer je R oddaljenost težišča telesa od droga in J vztrajnostni moment telovadca.
Potencialno energijo smo postavili na nič v najnižjo lego težišča.
Potencialna energija telovadca pri poljubnem kotu φ pa je:
( )( ) 212 2
1cos1 ωφ JmgRWWW krp ++=+= ,
kjer je ω1 kotna hitrost telovadca pri kotu φ, produkt R(1 + cos(φ)) pa višina težišča
telesa pri kotu φ. Ker je vsota nekonzervativnih sil enaka nič, velja, da je energija v
stoji enaka energiji pri kotu φ:

99
21 WW = .
Iz zapisanega dobimo:
( )( ) 21
20 2
1cos1
21
2 ωφω JmgRJRmg ++=+
in izpeljemo kotno hitrost:
( )( )J
mgR φωω cos12201
−+= .
Iz enačbe za ω1 lahko tudi razberemo, da večji vztrajnostni moment telesa pomeni
nižjo kotno hitrost vrtenja telovadca ob enaki energiji.
Primer: skok z elastiko
Postavljalci skoka za elastiko želijo z mostu nastaviti ustrezno dolžino elastike za
skok. Višina med mostom in tlemi je natanko h = 40 m. Elastika ima koeficient
prožnosti k = 200 N/m. Ali je nastavitev dolžine elastike na L = 20 m primerna za
skok 70 kg težkega športnika? Športnik se pri skoku ne sme poškodovati, torej se ne
sme dotakniti tal v najnižji točki. Sistem obravnavaj kot točkasto telo brez zračnega
upora; elastika se razteza po Hookovem zakonu.
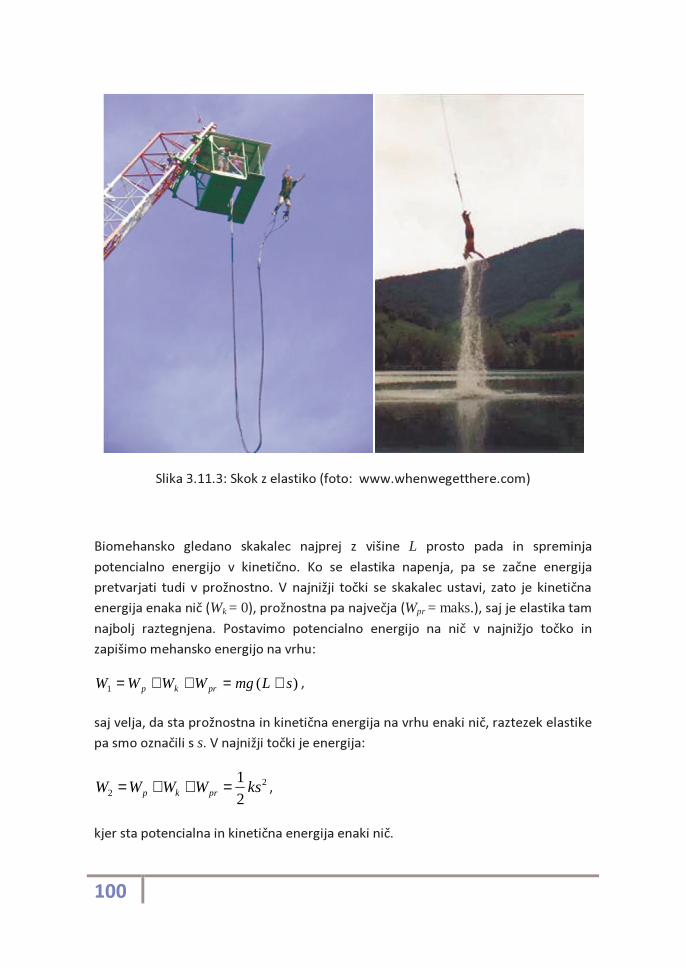
100
Slika 3.11.3: Skok z elastiko (foto: www.whenwegetthere.com)
Biomehansko gledano skakalec najprej z višine L prosto pada in spreminja
potencialno energijo v kinetično. Ko se elastika napenja, pa se začne energija
pretvarjati tudi v prožnostno. V najnižji točki se skakalec ustavi, zato je kinetična
energija enaka nič (Wk = 0), prožnostna pa največja (Wpr = maks.), saj je elastika tam
najbolj raztegnjena. Postavimo potencialno energijo na nič v najnižjo točko in
zapišimo mehansko energijo na vrhu:
)(1 sLmgWWWW prkp +=++= ,
saj velja, da sta prožnostna in kinetična energija na vrhu enaki nič, raztezek elastike
pa smo označili s s. V najnižji točki je energija:
22 2
1ksWWWW prkp =++= ,
kjer sta potencialna in kinetična energija enaki nič.

101
Iz izreka o ohranitvi energije dobimo:
21 WW =
oziroma:
2
21
)( kssLmg =+ .
Rešimo kvadratno enačbo in dobimo:
( )k
kmgLmgmgs
22
2,1
+±= ,
kjer pričakujemo pozitivno rešitev za raztezek in dobimo s = 15.84 m. Vsota L + s < h, zato je elastika primerno nastavljena.
Za vajo lahko bralec izračuna še, koliko je najdaljša nastavitev elastike pri istih
pogojih, da se skakalec ne bo dotaknil tal pri skoku z njo.

102
3.12 Mehanskamoč
Pri analizi gibanja je pogosto pomembno, v kolikšnem času sila ali navor opravi
delo. Zato v biomehaniki vpeljemo količino, ki jo imenujemo moč in je definirana
kot opravljeno delo na časovno enoto:
dt
dAP = . (3.80)
Enota za moč je »watt« [W] in je po enotah enaka [J/s], torej koliko joulov na
sekundo dela opravimo. Če imamo opravka s stalno močjo, lahko opravljeno delo
neposredno izračunamo:
PtA = , (3.81)
kjer je t čas trajanja. V splošnem pa moramo delo iz moči izračunati s pomočjo
integrala:
∫= PdtA (3.82)
v določenem časovnem obdobju.
Pri premem gibanju moč izrazimo kot produkt sile in hitrosti njenega prijemališča
vr
:
vFdt
sdF
dt
dAP
r
r
r
r
⋅=⋅== , (3.83)
To velja ne glede na to, ali je gibanje pospešeno oziroma pojemajoče, in ne glede
na to, v katero smer kažeta sila in hitrost.
Podobno izrazimo tudi moč pri vrtenju, kjer delo opravlja navor Mr
pri kotni hitrosti
vrtenja ωr :
ωφ r
r
rr
⋅=⋅== Mdt
dM
dt
dAP . (3.84)
Primer: smučar z maso m = 80 kg se v smuku naravnost spusti po klancu navzdol z
naklonom φ = 10°. Koeficient trenja med smučmi in podlago je kt = 0.02, njegov
prečni presek je S = 0.5 m2, koeficient upora pa cu = 0.7. Izračunaj, kolikšna je moč

103
sile trenja in moč sile upora, ko smučar doseže ravnovesno hitrost. Gostota zraka je
ρ = 1.2 kg/m3.
Nr uF
r
sFr
trFr
gFr
dFr
Slika 3.11.4: Delujoče sile na smučarja
Na smučarja delujejo sila teže, sila upora in sila podlage, ki je sestavljena iz trenja in
sile normale (slika 3.11.4). Uporabimo 1. Newtonov zakon, ker je smučar v
ravnovesju vseh sil:
0=+++ utrg FFNFrrrr
.
Sistem zasukamo tako, da je os x poravnana z naklonom terena, os y pa je
pravokotna nanj. Silo teže razdelimo na dinamično in statično komponento:
( ) ( )( ) ( )φφ
φφcoscos
sinsin
mgFF
mgFF
gs
gd
==
==
in zapišimo sile v smeri x:
0=−− utrd FFF
ter v smeri y:

104
ss FNFN =⇒=− 0 .
Uporabimo zadnji rezultat in ga vstavimo v izrek za silo trenja:
( ) ( )φφ coscos mgkFkFkNkF trgtrstrtrtr ==== .
Vstavimo dobljeno silo trenja v sile, ki nastopajo v smeri x, in uporabimo kvadratni
zakon upora za silo upora. Dobimo:
( ) ( ) 021
cossin 2 =−− Svcmgkmg utr ρφφ .
Od tod izrazimo ravnovesno hitrost:
( ) ( )( )sm
Sc
kmgv
u
tr /2,24cossin2 =−=
ρφφ
Ker sta sili trenja in upora vzporedni s hitrostjo, dobimo za moč sile trenja:
WvFvFP trtrtr 76,15=−=⋅= r
r
in za moč sile upora:
WvFvFP uuu 16,123=−=⋅= r
r
.
V obravnavanem primeru je moč sile upora skoraj 8-krat večja od moči sile trenja.
105
Viri
Kladnik R. (1991). Visokošolska fizika. Del 1, Mehanski in toplotni pojavi. Ljubljana :
Državna založba Slovenije.
Kugovnik O., Supej M. in Nemec B. (2003). Biomehanika alpskega smučanja.
Ljubljana : Fakulteta za Šport.
Strnad J. (2007). Fizika. Del 1. Ljubljana : DMFA – založništvo.
Svenšek F. (2004). Biomehanika. Ljubljana : Visoka šola za zdravstvo.
Za tiste, ki želijo poglobiti zanje iz biomehanike:
Enoka R. (1994). Neuromechanical basis of kinesiology. Champaign, IL : Human
Kinetics.
Winter D. (2005). Biomechanics and motor control of human movement.
Biomechanics and motor control of human movement.
Zaciorskij V.M. (1998). Kinematics of human motion. Champaign, IL : Human
Kinetics.
Zaciorskij V.M. (2002). Kinetics of human motion. Champaign, IL : Human Kinetics.
106
Recenzije
doc. dr. Bojan Nemec
Biomehanika predstavlja eno temeljnih kinezioloških znanosti, ki proučuje gibanje
človeka. Učbenik »Biomehanika 1« tako predstavlja dolgo pričakovani učbenik za
študente Fakultete za Šport, za katere predstavlja razumevanje biomehanskih
konceptov eno od temeljnih znanj. To je prvi učbenik na področju Slovenije, ki
obravnava tematiko Biomehanike športa.
Avtor v svojem učbeniku združi razumevanje osnovnih mehanskih zakonitosti in
njihove razlage s športno tematiko. Večji del učbenika se ukvarja z interakcijo
športnika z njegovimi športnimi rekviziti in okolico v kateri se nahaja. Razdeljen je
na dve osnovni veji mehanike: kinematiko, ki se ukvarja z opisom gibanja, in
dinamiko, ki se zanima za vzroke za gibanje.
Učbenik sledi standardni razdelitvi kinematike in dinamike ter zadovolji tudi
zahtevnejše bralce z natančno definiranimi zakonitostmi in izpeljavami. Manj
zahtevi študenti pa bodo predvsem hvaležni vmesnih opomb in razlag. Za vse
študente pa so zanimivi primeri neposredno povezani z aktualno problematiko v
športu, ki jih avtor sproti obravnava skupaj z napredovanjem po vsebini.
Za popestritev učbenika je vključenih tudi nekaj zanimivih fotografij in kinogramov
vrhunskih športnikov, ki so posledica vrste meritev opravljenih v okviru Fakultete za
šport. To dodaja pečat aktualnosti učbenika in nakazuje na pomen razumevanja
Biomehanike za študente. Avtor že v predgovoru poskuša sicer bolj družboslovno
usmerjenim študentom Fakultete za šport pojasniti pomen razumevanja osnovnih
naravnih zakonitosti za šport. Ob tem predstavi še zanimiv in nov pogled na
obravnavanje v Biomehaniki: »eno raven nižje«, ki pravi, da za razumevanje
dogajanja na določeni ravni sveta, mora opazovalec vedno razumeti eno raven
nižje.
Učbenik za Biomehaniko 1 bo lahko bistveno pripomogel k študiju in razumevanju
osnovnih konceptov gibanja v prostoru bodočih strokovnjakov na področju športa,

107
ki jim je ponavadi ta tematika na žalost preveč tuja. To se še posebej pokaže v
športih, kjer prihaja do velikih in naglih tehnoloških sprememb in napredovanj.
Ljubljana, 28. Februar, 2011
108
doc. dr. Nejc Šarabon
Za kakovostno strokovno delo v športu je nujno dobro poznavanje nekaterih
temeljnih naravoslovnih ved, kot so funkcionalna anatomija, fiziologija,
biomehanika in druge. Z učbenikom Biomehanika 1 smo dobili prvi slovenski
visokošolski učbenik s področja biomehanike v kineziologiji športa. V njem so na
jasen način predstavljene temeljne biomehanske vsebine in aplikativni primeri iz
športa. Avtor doc. dr. Matej Supej, po svoji temeljni izobrazbi fizik, je odličen
raziskovalec svetovnega kova, bil pa je tudi tekmovalec, demonstrator in trener v
alpskem smučanju. Ob svojem poglabljanju v znanstveno-raziskovalna vprašanja
nenehno ohranja uporabno naravnanost in posledično ohranja stik z vrhunskim
športom kot strokovni svetovalec in predavatelj doma in v svetu.
Učbenik najprej poda osnove kinematike, ki se ne sprašuje o izvorih gibanja, temveč
gibanje kot takšno zgolj opiše s fizikalnimi količinam. Opredelitvi različnih oblik in
kompleksnosti teles sledijo predstavitve enakomernega, pospešenega
premočrtnega in ukrivljenih gibanj na primerih različnih vrst metov. Sledi poglavje o
dinamiki, v katerem so predstavljene sile, ki povzročajo spremembe smeri oziroma
hitrosti gibanja. Avtor učbenika seznani s ključnimi zakonitostmi o delovanju sil, kot
so osnovni zakoni o gibanju, trenju, obtekanju tekočine in drugi. Skozi tekst se
vrstijo nazorni praktični primeri, kot so let rotirajoče žoge za ponazoritev
Magnusovega efekta; globinski doskok in drsalni par za boljše razumevanje sunka
sile, gibalne količine in trka teles; valgusni navor kolenskega sklepa v odvisnosti od
širine smučke in številni drugi. Avtor vsebine vseskozi nadgrajuje, kot na primer, ko
s predhodnimi razlagami pripravi osnovo za razumevanje pomena Steinerjevega
zakona ali pa pomena ekscentričnega odriva za kakovostno izvedbo prevrata prosto
naprej v gimnastiki. V zadnjem delu učbenika doc. dr. Matej Supej predstavi
vsebine s področja mehanskega dela, energije in moči. S primeri (skok v višino,
veletoč, skok z elastiko) podkrepljene razlage potencialne, kinetične in prožnostne
energije zaključi z izrekom ohranitvi mehanske energije.
Učbenik zapolnjuje vrzel na področju biomehanike športa in je zaradi svoje
aplikativne usmerjenosti dobrodošlo učno gradivo ne le za študente športa, temveč
tudi za mnoge druge študente in strokovnjake iz področij fizikalne medicine,
ergonomije, športne tehnologije, ortopedije idr. Matej, kot kolega in kineziolog, se
ti zahvaljujem za Biomehaniko 1 in mislim, da lahko tudi v imenu mnogih drugih
kolegov rečem: več kot dobrodošla bi bila tudi učbenika Biomehanika 2 in 3. Takšne
učbenike potrebujemo, da bomo lahko še bolj učinkovito razvijali na znanosti

109
temelječo športno stroko v Sloveniji in bili prepričljivi v komunikaciji s sebi
sorodnimi strokami.
Ljubljana, 30.3.2011
110
O avtorju
doc. dr. Matej Supej je diplomiral na Fakulteti za
Matematiko in Fiziko na Univerzi v Ljubljani iz
»Spektrometra pozitronske anihilacije«, magistriral iz
»Povezave prostega volumna z mehanskimi lastnostmi
viskoelastičnih materialov« na Fakulteti za Strojništvo na
Univerzi v Ljubljani in doktoriral iz »Vpliva spremenjenih
biomehanskih parametrov na tekmovalno slalomsko
tehniko« na Fakulteti za Šport na Univerzi v Ljubljani. Je
docent za področje znanost o športu – kineziologija.
Zaposlen je na Fakulteti za Šport, Univerza v Ljubljani,
kjer je vodja Laboratorija za Biomehaniko in nosilec predmetov Biomehanika 1,
Biomehanika 2 in Biomehanika športa na dodiplomskem študiju ter nosilec
predmeta Raziskovalne metode in modeliranja v biomehaniki športnih gibanj na
doktorskem študiju. Hkrati je delno zaposlen tudi na Fakulteti za Matematiko in
Informacijske tehnologije, Univerza na Primorskem, kjer je nosilec predmeta
Analiza gibanja in obremenitev človeškega telesa. V svojem znanstveno-
raziskovalnem delu s pridom izkorišča znanje o športu, ki ga je pridobil kot vrhunski
tekmovalec v alpskem smučanju, član nekdanje Jugoslovanske reprezentance in kot
dolgoletni član A demonstratorske vrste pri Zvezi Učiteljev in Trenerjev Slovenije. O
njegovi znanstveno-raziskovalni uspešnosti priča vrsta mednarodno priznanih in
odmevnih objav v mednarodnih revijah najvišje ravni, mednarodna nagrada za
inovativnost in vabljena predavanja na znanstvenih konferencah. Strokovno
uspešnost pa izkazuje preko vrste povabil za izobraževanje trenerjev širom po
svetu, meritev in svetovanju vrhunskih tekmovalcev in trenerjev. Svojo strokovno
kariero je pred leti kronal z znanstveno monografijo »Biomehanika alpskega
smučanja«, ki jo je kot glavni avtor napisal ob pomoči kolegov dr. B. Nemca in dr. O.
Kugovnika.

111
Naslov:
Biomehanika 1 – učbenik za študente Fakultete za šport
Avtor:
Matej Supej
Recenzenta:
doc. dr. Bojan Nemec, doc. dr. Nejc Šarabon
Lektoriranje:
Tatjana Pihlar
Slikovni material:
Matej Supej, Ivan Čuk, Stanko Štuhec
Oblikovanje in prelom:
Matej Supej
Izdala:
Univerza v Ljubljani
Fakulteta za šport
Inštitut za Šport
Ljubljana 2011