Embed Size (px)
Citation preview

Studying the Ecology of Globalized Societies
René te Boekhorst
Adaptive Systems Research GroupDept. of Computer ScienceUniversity of Hertfordshire
U.K
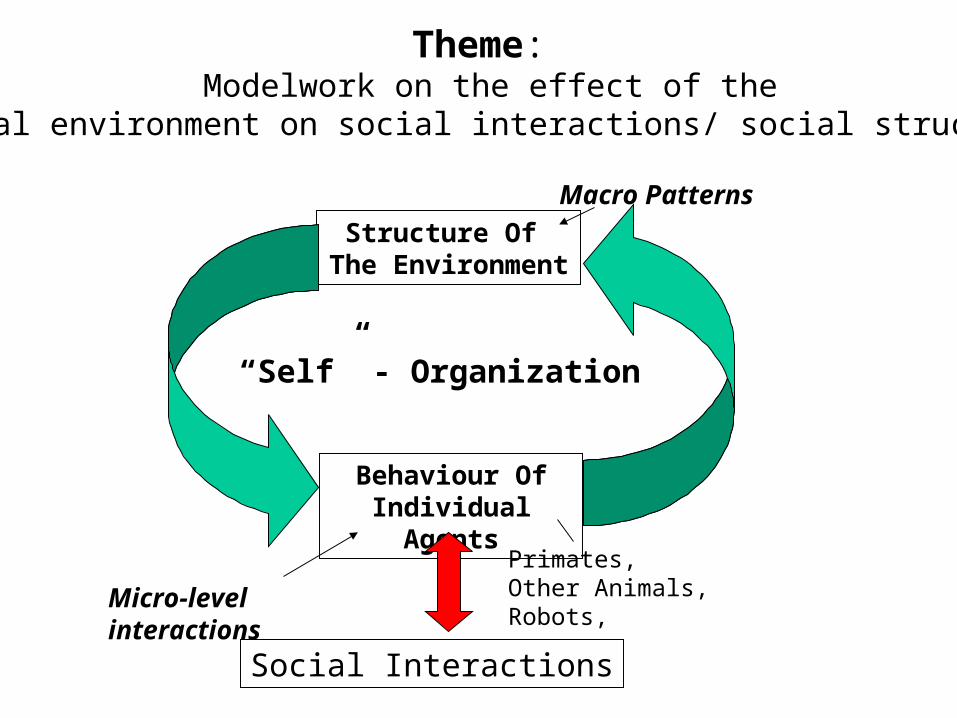
Theme: Modelwork on the effect of the
Local environment on social interactions/ social structure
Primates,Other Animals,Robots,
Behaviour OfIndividual Agents
Structure Of The Environment
Micro-levelinteractions
Macro Patterns
“Self” - Organization
Social Interactions

Broader Scope:
Pattern Formation&
Connectivity of Participating Entities
Models to study:
ECOLOGY*Diversity*Stability of EcoSystems*
*Meta systems : “entities” can be systems (communities) themselves

The Information Revolution
The IT Designers Dream …
All People Happily Connected&
Absorbing Information
Knowledge To All!
No More Drudge
Fraternité
Equalité
Liberté

… Is the Environmentalists’ Fear
• Domination of Multi-Nationals (e-mperialism)
Global WarmingBiotech
Degradation of Biodiversity
Destruction of Environment
• Slavish attitude of governments towards business and e-capitalism
Social Issue

Opposing Views
Scientific Approach to a Social/Political Issue
“Connectedness”
Diversification
of• Society• Culture• Behaviour
ORImpoverishment
Superficialisation
ExploitationDigital gap

This Talk:
Suggestions
for applying those ecological models to
Pattern Formation
&Connectedness of
Participating Human Communities
*Diversity*Stability of Social Systems*
*Meta systems
Integrated Project forFrameWork VI

Theoretical Ecology
*Czárán, T. (1998): Spatiotemporal Models of Population and Community Dynamics. Chapman & Hall (London)
“ Mass –Interaction ” Models
Type of Models*
Object – oriented(neighbourhood -)Models
Patch – AbundanceModels

• What are their merits/flaws ?
• Can they be used to study social structure ?
in particular networks of human communities
Examples fromPrimate studies
Proposals
Beyond modelling:Experiments with robots

“Mass-Interaction” Models
Basic object is the population: homogeneous mass instead of individuals
Analogous to reaction kinetics (“mass – action”) of a well – mixed chemical system
Model formalism: set of coupled (non – linear ) linear, (partial) ODEs
Dynamical Systems Approach

• (limited) Population Growth Logistic Equation(continuous)
Asymptotic density
0
0.05
0.1
0.15
0.2
t
N
tNK
r)t(Nr
dt
tdN 2
K
Carrying Capacity
Instantaneous rate of increase = + Net birth rate Net migration rate

• Interactions between Populations
x2
r/s
r/S k
K
x1
r/s
x2
K
R/Skx1
Coexistence:r/k > SR/K > s
Lotka – VolterraEquations
(Un-)stable equilibriaCompetition
212
22
211
11
xSx)K
x1(Rxx
xsx)k
x1(rxx
0x1
0x2 isoclines
Exclusion
s
rx
ks
rx
0x
12
1
KxR
KSx
0x
12
2

Multi-Species (Community) Models: Stability and Complexity
Coexistence of 2 competing species (communities):
parameters must satisfy 2 inequalities (r/k > S AND R/K > s)
Strobeck (1973): n competing species (communities):
2(n-1) inequalities
Chance of coexistence for large n is small (when parameters have randomly chosen values)

If number of species (m) OR connectance C increases:
average strength of interactions S ≈ Stability decreases
when interactions are random
May, R.M (1973): Stability and Complexity in Model Ecosystems. Princeton Univ. Press
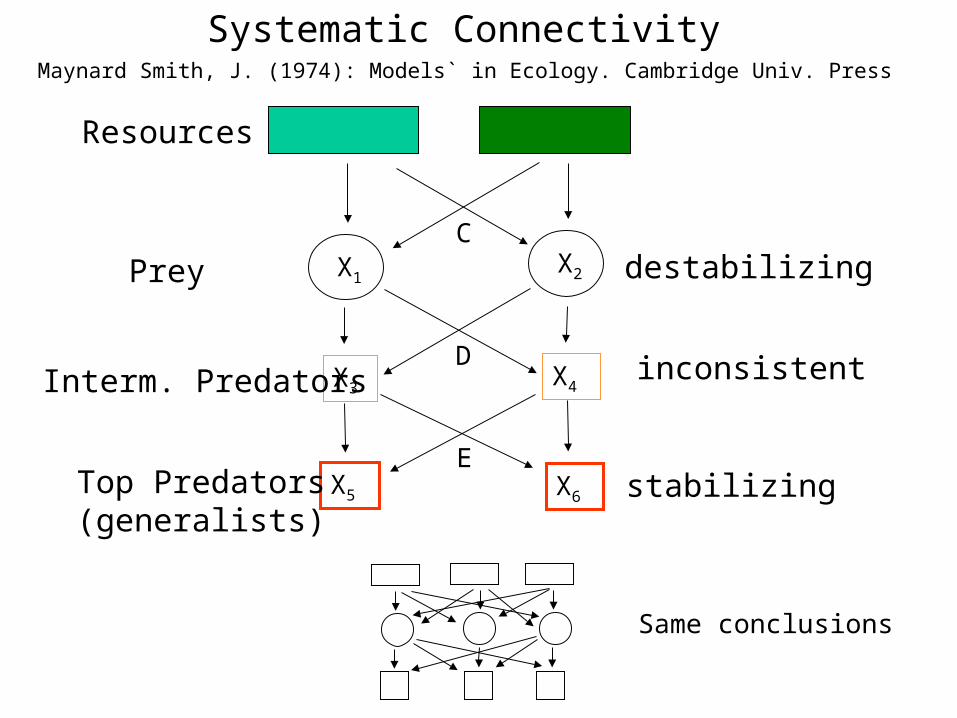
Systematic Connectivity
X1X2
X3 X4
C
D
X5 X6
E
Resources
Prey
Interm. Predators
Top Predators(generalists)
destabilizing
inconsistent
stabilizing
Same conclusions
Maynard Smith, J. (1974): Models` in Ecology. Cambridge Univ. Press

From Communities Down To Groups
Within-Group Competition (WGC)
212
22
211
11
xSx)K
x1(x r x
xsx)k
x1(rx x
Instantaneous rate of increase = +
Between-Group Competition (BGC)
*Larger group displaces smaller group *Members defect smaller group
Net birth rate
Net migration rate
2
121 x
xlncx,x
*Dominants should relax WGC“Egalitarian” instead of “Despotic” societies
Dynamics of Group Size
*van Hooff, J. A. R. A. M & C. P. van Schaik (1992). In: Coalitions and Alliances in Humans and other Animals. Oxford University Press.

k
K
x2
x1
x 2 =
x 1. e
/c
x2 = x1
.e -/c
x 2 = x 1 Isoclines of x1
Isoclines of x2
0x1
0x2
2
121 x
xlncx,xr
te Boekhorst, I.J.A. & Hemelrijk, C. K. (2000). In: “Dynamics of Human and Primate Societies: Agent-Based Modelling of Social and Spatial Processes”. Santa Fe Institute Studies in the Sciences of Complexity. Oxford University Press.
Claim of van Hooff & van SchaikDOES NOT hold! Smaller groups can come into equilibrium and hence coexist with larger ones

AND MUCH MORE POSSIBILITIES
• Dynamical systems model for sub-group formation (in prep) (following a charismatic leader)
• Homeomorphism: Same equations model dynamics of a general motivational system based on allocation of (physiological) energy
* Can possibly be realized in hardware* Brings together concepts from various ethological models* Rich behaviour: dynamical threshold hysteresis excitable (viz. neuronal dynamics)

Problem Mass – Interaction Models:
• Not based on what individuals actually do
• Quickly analytically intractable
• Strategic models: deep(er) theoretic insight hard to back up by empirical data

Object – oriented (neighbourhood -) Models
• Explicitly spatial and local sites: Cellular Automata entities: Individual Oriented Models
• Simulation instead of Analysis
Two individuals cannot be present on the same place simultaneously
and that matters!
Agents
EXAMPLE: Socio-spatial structuring in primates te Boekhorst & Hogeweg: CHIMPs and ORANGs Hemelrijk: Dominance structures in Macaques

Select Random Partner
DOMINANCEINTERACTION
Ego Wins Ego Looses
Flee FromOpponent
GotoOpponent
OTHERS < PERSSPACE?
YES
OTHERS < NEARVIEW?
NO
OTHERS < MAXVIEW?
YES
Move On
NO
MoveTo Other
Turn SEARCH ANGLEAt Random To Left or
Right
YESNO
Behavioural rules of the entities in Hemelrijk’s models. Execution of acts depends on whether threshold values of threeparameters are surpassed that symbolize critical distances: “Personal Space” (PERSSPACE) < NEARVIEW < MAXVIEW

3.033 4.067 5.1 6.134 7.167 8.2 above
X-POSITION
Y-P
OS
ITO
N
-40
-30
-20
-10
0
10
20
30
40
-30 -20 -10 0 10 20 30 40 50
Ranks:
n0
2
4
6
8
10
12D
omV
alue
time
Dominance Hierarchy
Socio-Spatial Distribution
te Boekhorst, I.J.A. & Hemelrijk, C. K. (2000). In: “Dynamics of Human and Primate Societies: Agent-Based Modelling of Social and Spatial Processes”. Santa Fe Institute Studies in the Sciences of Complexity. Oxford University Press.

Problem Individual-based Models
Its all in silica
How Real are the Rules?
No real-world constraints
Classical A.I.Computer/Programming metaphors:
• Cognition as Computation
• Behavior as Problem Solving
Cognitive Science
Rational Solutions(Knowledge, Reasoning & Planning)
AlgorithmicDisembodiedNon-situated
I exist( … I think ..)
Cognitive Ethology/Psychology “Intelligent” Behaviour

Only One Problem:
IT DOESN’T WORK
Or just marginally and thenonly in a very artificial environment
• Static• Decomposable• Linear• Deterministic
UNFORTUNATELY, the real world is Dynamic, Convoluted, Nonlinear, Messy and Noisy

Confronts us with:
• important real world conditions and
• physical constraints
that are hard to program or would go otherwise unnoticed
Artificial Autonomous Agents
Why Robots?

EMBODIEDinstead of algorithmic
SITUATEDNESSLocal Interactions instead of Global Knowledge
PHYSICAL AND INFORMATIONAL CONSTRAINTS
EMERGENCEthrough
SELF-STRUCTURINGSELF-STRUCTURINGDISTRIBUTED ORGANIZATION
instead of Central Control
Robot Architecture following “New A.I.”
Artificial Autonomous Agents

Architecture & Operation
Obstacle Detector (IR sensor)
Excitatory Connection
Inhibitory Connection
OBSTACLE
MOTORS
Object Avoidance by a Braitenberg Vehicle(Braitenberg, 1984)
Based on R/C car (Tyco Scorcher) •Very fast •Differential 4WD (4 propulsed out of 6) •Intel 16-bit 196KD microcontrollers (20 MHz) •IR, and ambient light sensors •Programmable in C and assembler
Realization: DIDABOT(Marinus Maris
www.ifi.unizh.ch/groups/ailab/robots)

Experimental Set Up
260 cm
230 cm
initial configuration

ad.d adjust in presence of didabotad.o adjust in presence of objectav.d avoid didabotfo.d follow didabotnb.o nudge object with backsideta..d turn around (> 180o) in presence of didabotta.o turn around (> 180o) in presence of objectta.ow turn around (> 180o) before an object against the wallto.o touch objectwi wigglewi.d wiggle in front of didabotta.o ad.d
ta.ow
ta.d
ad.o
av.d
to.o
.800.
76
0.70
0.780.76
0.79
0.86
0.84
0.77
0.72
F5 = nb.o(0.12)
0.78
0.77
F4 = av.o(0.10)
0.64
wi
wi.d
0.77
fo.d0.76
F3 = ObjectAversiveDidaOriented
(0.23)
F1 = ObjectOriented, DidaAversive
(0.27)
F6(0.19)
F3=ObjectAversive
0
1
2
3
4
5
6
7
1 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97
F1=DidAv/ObjOr
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97
F4=ObjectAvoid
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
F 2 =WiF o
0
0.5
1
1 .5
2
2 .5
3
3 .5
NudgeObject
0
0.5
1
1.5
2
2.5
Factor Analysis of Didabot Behaviour
Behaviour of situatedrobots can be very complicated!

Typical end configuration for experimentwith three robots

12 3 4
5
How Didabots bring objects together

HOW ARE LARGE HEAPS FORMED ?
Why not just PAIRS of blocks ?
PAIRS: Still many configurations that escape detection
TRIO’S/QUARTETS: Prob(Contact) much lower!
CLUSTERS (n > 4) GROW BY ADDITION OF SINGLE BLOCKS
Chains of lined-up blocksare rarer the more blocksmake up a constellation
Instead, better detectable “globular” configurations are more common

Object right ahead Against Wall
Other Dida approaches
Leave Object
Avoid Dida
Heap
Destroy Pair/Trio
Single object
Push object
Against other object(s)=
Pair (Trio)

SOME SUGGESTIONS

!!
Motivational dynamics(to signal “willingness”)
mdm)mEnergy (cm
mm
DynSysModels
“Hebbian social learning”? If individuals simultaneously and mutually signal “willingness” their bond strengthens
ANN’s
In Robots?
*encounter frequency*group size *time budget of individuals
Indiv.BasedModelsWhat type of network
(topology) developsdepending on:
What happens whenestablished topologiesbecome connected?
?
Can we study stability/diversity of these (linked)webs as in ecology?
Forgetting-rate!

WHAT IS LACKING
• Dynamical Systems Models*
• Network Models
• Individual Oriented Models*
• Multi-agent (hardware) Experiments**
for“Mixed Societies”
* Proposed IP by J.L. Deneubourg in FETCurrent Project
“ROBOT CULTURES”