Embed Size (px)
Citation preview

REPORT
UCB/SEMM
STRUCTURAL ENGINEERING MECHANICS AND MATERIALS
CE 220 - STRUCTURAL ANALYSIS,
THEORY AND APPLICATIONS
COURSE SUMMARY and
EXAMINATIONS FROM YEARS 2000-2005
by
FILIP C. FILIPPOU
FALL SEMESTER 2006 DEPARTMENT OF CIVIL ENGINEERING UNIVERSITY OF CALIFORNIA BERKELEY, CALIFORNIA

Introduction
The following collection of structural analysis problems were given as examination problems in the course CE220, Structural Analysis, Theory and Applications during the years 2000 through 2004. They represent the required level of mastery of course material by the students noting that quiz problems were to be solved in 15 to 20 minutes, midterm exams were to be completed in approximately 90 minutes, and final exams were to be completed in 3 hours.
The problems cover most of the concepts presented in the course. For ease of identification and better organization they are subdivided into sections. In each section a summary of the underlying theory is provided along with pointers for an efficient and rapid solution by hand. The problem statements are then listed separately from the solutions, so that the reader is encouraged to think about the problem before attempting to consult the solution. The solutions only include key steps and final answers requiring the reader to engage in the solution process by adding intermediate steps and explanatory comments, wherever necessary.
The subjects of the examination problems are:
1. Numbering of free global degrees of freedom (dof's), numbering of basic element forces, determination of degree of static indeterminacy, writing of individual equilibrium equations, solution of equilibrium equations in classical form or by principle of virtual displacements; lower bound theorem of plastic analysis
2. Relations of geometric compatibility between global dof displacements and element deformations for problems with constrained dof's, instantaneous center of rotation, compatibility and constraint transformation matrices
3. Principle of virtual forces as substitute for equations of compatibility and principle of virtual displacements as substitute for equations of equilibrium
4. Displacement method of analysis, determination of stiffness coefficients, initial force vector
5. Symmetry and its use in reducing the number of independent free dofs
6. Fore method of analysis for statically determinate structures; force-deformation relation for superelements
7. Force method of analysis for statically indeterminate structures; force influence matrices of the primary system for applied loading and basic force redundants, compatibility equations
8. Determination of displacements and deformations at incipient collapse of elastic, perfectly plastic structural models by application of principle of virtual forces
9. Substructuring by force and displacement method
The author thanks Margarita Constantinides for her help with the preparation of the summaries
for each section.
2 of 218

Modeling; Equilibrium Equations
All problems involve a 2d structural model with numbered nodes and elements and clearly
defined support conditions. It is required to number all degrees of freedom (dof's), particularly,
the free dof's in systematic fashion. It is also required to number the basic element forces in
systematic fashion. In numbering the basic element forces it is important to skip element releases
(these are most often end moment releases). In numbering the free global dof's it is important to
skip trivial global dofs, i.e. those equations involving a single unknown basic force.
1. Number free degrees of freedom (dof's) in node order following the sequence
a. X-translation
b. Y-translation
c. Z-rotation
2. Number restrained dof's in the same fashion
3. Number the basic element forces in element order following the sequence
a. Axial force
b. Moment at end i (lower numbered element node)
c. Moment at end j (higher numbered element node)
The degree of static indeterminacy of a stable, structural model (NOS) is the difference
between the number of basic element forces (NBEF) and the number of free dof's (NF) or,
expressed differently, the number of available equilibrium equations of the node free bodies in
the direction of the free dof's (NFEQ).
3 of 218

General Concepts on Equilibrium Equations
The equilibrium equations of all node free bodies in the direction of the free dof's can be
expressed in the compact form
f f fwP B Q P= +
where fB is the equilibrium matrix, fP are the applied forces at the free dofs, and fwP are the
nodal forces at the free dofs due to element loading. The vector Q is the collection of the basic
forces q of all elements in the structural model. The latter are defined as the independent subset
of the end element forces. When equilibrium is satisfied in the undeformed configuration, the
terms of the equilibrium matrix depend only on the original geometry of the structural model (i.e.
before deformation). Satisfying equilibrium in the undeformed configuration is a reasonable
approximation as long as the deformed configuration does not differ significantly from it. Under
this assumption the relation between applied forces and resulting basic element forces Q is
linear and the principle of superposition holds, i.e.
( )f1 f 1
f2 f 2 f1 f2 f 1 2
if
and then
=
= + = +
P B Q
P B Q P P B Q Q
In the interest of reducing the number of equilibrium equations to the minimum possible for
hand calculations we neglect trivial equilibrium equations of the form i m=P Q , particularly
when 0i =P . By appropriate combination of equilibrium equations (selection of suitable free
bodies for certain dof directions) we can avoid the appearance of basic forces of secondary
interest in certain problems, e.g. the axial forces in frame elements. The available equilibrium
equations reduce accordingly, because the degree of static indeterminacy is a property of the
structural model.
The properties of the equilibrium matrix fB give the following information:
• If fB is square and non-singular, then the structural model is statically determinate and stable
• If fB has more columns than rows, then the structure is indeterminate; the degree of static indeterminacy is the difference in the number of columns and rows and establishes the number of basic force redundants that can be selected at will as far as the satisfaction of equilibrium is concerned; the removal of the force redundants creates a primary structure
4 of 218

which needs to be stable. The kinematic method is the most convenient approach for assessing the stability of a statically determinate structure by hand.
The equilibrium equations of all node free bodies in the direction of the restrained dof's can
also be expressed in the compact form
d d dwP B Q P= +
where all terms are analogous to the corresponding terms in the equations for the free dof's.
The above equations permit the determination of support reactions after all basic element forces
Q have been determined. For hand calculations it is advisable to determine one support reaction
at a time directly from the equilibrium equation of the node free body in the direction of the
corresponding restrained dof.
The inverse of the equilibrium matrix of a statically determinate structural model is the force
influence matrix B of the model.
1
fB B −=
The coefficient ijB of this matrix expresses the effect that a unit force at dof j on basic force i in
the structural model. The force influence matrix of a statically indeterminate structural model can
be obtained either with the force or with the displacement method, as will be shown in the
course.
An interesting application of the equilibrium equations arises in the lower bound theorem of
plastic analysis. For the case that the basic forces have a finite plastic capacity plQ we seek to
determine the collapse load factor l for a given pattern of applied forces fP under the
assumption that a complete collapse mechanism has formed (a partial collapse mechanism can be
treated in similar fashion but it is often complicated to identify which equilibrium equations
control). A complete collapse mechanism requires that the plastic capacity is attained for NOS+1
basic forces of the structural model, where NOS is the degree of static indeterminacy. Denoting
these basic forces with subscript pl and the remainder with subscript i we need to satisfy the
following equilibrium equations, if we neglect the effect of element loads
f f
fi i fpl pl
P B QB Q B Q
λ == +
5 of 218

In the last equation we have separated the contribution of the two groups of basic forces and
have made use of the fact that the basic force values are known for the pl basic forces. After
collecting unknowns on the left and known values on the right hand side we obtain
[ ]f fi fpl pli
P B B QQλ⎛ ⎞
− =⎜ ⎟⎝ ⎠
The coefficient matrix on the left hand side is created by stacking next to each other the applied
force pattern and the columns of the equilibrium matrix that correspond to the basic forces i.
Since the latter number NBEF – (NOS+1), we conclude that they number NFEQ – 1, because
NBEF = NFEQ+NOS. Consequently, the number of columns of the matrix on the left hand side
of the above equation is NFEQ as is the number of rows. Thus, the system of linear equations has
a unique solution
[ ] 1f fi fpl pl
i
P B B QQλ −⎛ ⎞
= −⎜ ⎟⎝ ⎠
Note: the above process works well with linear algebra tools. In hand calculations it is more
convenient to isolate the equilibrium equation(s) that involve l (non-zero entries in fP vector)
and solve for l first. A quick solution may require combination of several equations by suitable
selection of free bodies, or, preferably by the principle of virtual displacements. The latter is the
most direct approach to solve for a particular equilibrium equation of interest, as is the case in
the determination of the collapse load factor l .
The equilibrium equations play an important role in determining the collapse load factor of
an applied force pattern by the lower bound theorem of plastic analysis. This takes the form:
Given a structural model with a particular geometry that is subjected to an applied force
pattern refP and having elements with plastic capacities plQ , then the collapse load factor cl of
the applied force pattern can be found from the linear programming problem
ref f plmax for andc P B Q Q Qλ λ λ= = ≤
It is assumed that the positive and negative plastic capacities are the same, but this limitation can
be easily removed.
6 of 218

1
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #2 on Sept. 14, 2000
Problem (5 points)
1. Determine the degree of static indeterminacy for the two structures below.
Structure A
1
Structure B
7 of 218

8 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #1 on Sept. 11, 2003
Problem (5 points)
1. Number global equations of equilibrium and element forces Q using the simply supported beam as basic system. What is the degree of static indeterminacy of the model? Insert the necessary number of moment releases to convert the model into a statically determinate system.
2. Write down the equations of horizontal force equilibrium at node 5 and vertical force equilibrium at node 2.
a b
c d
e
f
10 6
8
12
3
4 5
9 of 218

10 of 218

Final Examination Fall Semester 2002
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2002 Instructor: Filip C. Filippou
Name: ______________________________
CE 220 – Structural Analysis, Theory and Applications
Final Examination on Dec. 19, 2002
TOTAL = 30 points
1. Problem (2 points)
What is the degree of static indeterminacy of the following structure? Substantiate your answer by supplying the number of equations of equilibrium and the number of unknown basic element forces.
11 of 218

12 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #1 on Sept. 12, 2002
Problem (5 points)
The element connectivity of the model is in order: 1-2, 2-3, 3-4, 1-4. You are asked to
1. Number global equations of equilibrium and element forces Q using the simply supportedbeam as basic system. Limit the global equations to the minimum necessary. What is thedegree of static indeterminacy of the model? Insert the necessary number of element releasesto convert the model into a statically determinate system.
2. Write down the equations of horizontal force equilibrium at node 1 and vertical forceequilibrium at node 2.
1
2
3
4
8' 8'
6'
12'
a b
cd
15
20
13 of 218

14 of 218

1
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #1 on Sept. 13, 2001
Problem (5 points)
The element connectivity of the model is in order: 1-2, 2-3, 3-4, 4-5, 2-4. You are asked to
1. Systematically number the global degrees of freedom and element forces Q using the simplysupported beam as basic system. Limit the global equations to the minimum necessary. Whatis the degree of static indeterminacy of the model?
2. Write down the equations of horizontal and vertical force equilibrium at node 4.
1
2
3
4
5
a
b c
d
e
10
6
8 8
15 of 218

16 of 218

1
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #1 on Sept. 7, 2000
Problem (5 points)
The elements and nodes are numbered in the structural model in the figure. The elementconnectivity of the model follows the order: 1-2, 2-3, 3-4, 4-5 1-3, 3-5.
1. Number systematically the global degrees of freedom and element forces Q using thesimply supported beam as basic system. Limit the global equations to the minimumnecessary. What is the degree of static indeterminacy of the model?
2. Write down the equations of horizontal and vertical force equilibrium at node 3.
1
2
34
5
a
b c
de f
6 6
8
1215
17 of 218

18 of 218

Midterm Examination #1 Fall Semester 2004
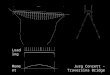
3. Problem (8 points)
The figure shows the location of the plastic hinges at incipient collapse of the structural model under the given service loads. The plastic flexural capacity of elements a and b is 100 units and that of elements c and d is 50 units. The plastic axial capacity of the braces is 200 for the lower and 100 for the upper.
Determine all basic forces, the support reactions and the collapse load factor l and make sure to check global equilibrium.
10
8
8
50
50
a
b
c
d
19 of 218

20 of 218

21 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #2 on Sept. 18, 2003
Problem (5 points)
Determine the collapse load factor for the structural model below under the given loading. At incipient collapse the plastic moment capacity is reached at the locations indicated with a gray circle. The plastic moment capacities are the encircled numbers in the figure on the right. The axial plastic capacity is so large that it does not affect the result.
3040
4 4
6
6a
b c
d
e
1
2 3 4
5
6
3040
120 120
150 150
150
22 of 218

23 of 218

Midterm Examination #1 Fall Semester 2004
4. Problem (2 points)
Is the structural model in the figure statically determinate? Is it stable? Justify your answers.
10
6
8
8
24 of 218

25 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #1 on Sept. 20, 2004
Problem
What is the degree of static indeterminacy of the model in the figure? To answer the question give the number of non-trivial equilibrium equations and the corresponding number of unknown basic forces. If the structure is indeterminate, select a stable, statically determinate system by inserting the necessary number of moment releases. Show in detail that the selected system is stable (no matrix calculations please!).
1
2
3 4
8 8
6
5
6
a
b
c
d e
26 of 218

Final Examination Fall Semester 1999
2
1. Problem (2 points)
For the structure in the figure identify the degree of static indeterminacy NOS and propose a statically determinate primary system ONLY utilizing internal moment releases.
27 of 218

Final Examination Fall Semester 2000
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2000 Instructor: Filip C. Filippou
Name: ______________________________
CE 220 – Structural Analysis, Theory and Applications
Final Examination on Dec. 21, 2000
Total points = 40
1. Problem (6 points)
For the symmetric structure in the figure identify the basic element forces and the available equations of equilibrium and determine the degree of static indeterminacy for a general loading, a symmetric loading and an asymmetric loading.
For the same structure identify the smallest number of independent global free degrees of freedom for a general loading, a symmetric loading and an asymmetric loading, if axial deformations are neglected in the vertical and horizontal members.
28 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #2 on Oct. 4, 2004
Problem
Determine the collapse load factor for the structural model in the figure under the shown applied forces. Element a has a plastic moment capacity of 200 units, while elements b, c and d have a plastic moment capacity of 100 units. For elements a through d the plastic axial capacity is very large. Truss elements e and f have a plastic axial capacity of 20 units.
a
b c
de f
6 6
6
8
14 14
12
29 of 218

Compatibility
The compatibility equations express the relation between the displacements at the free global
dof's fU and the element deformations V . The latter vector is the collection of the deformations
v for all elements in the structural model. Under small displacements and deformations this
relation can be written in compact form as
f fV A U=
where fA is the structure compatibility matrix for the free global dof's fU , which are unknown
at the beginning of the analysis. The terms of the structure compatibility matrix depend only on
the undeformed geometry of the structural model and, therefore, result in a linear relation
between global dof displacements and element deformations. Consequently, we can conclude
that
( )1 f f1
2 f f2 1 2 f f1 f2
if
and then
=
= + = +
V A U
V A U V V A U U
Under the assumption of small displacements the columns of the compatibility matrix contain the
element deformations for a unit displacement of the corresponding free global dof and can be
established in this manner by geometric considerations. It can be shown by the principle of
virtual work that the structure equilibrium matrix for the free dof's of the structural model is the
transpose of the structure compatibility matrix, i.e.
Tf f=B A
It is worth noting that the independent element deformations for an element with a moment
release at one end are only two: the axial deformation and the rotation of the tangent relative to
the chord at the continuous end.
In the interest of reducing the number of independent free global dof's of a structural model
for better insight into its behavior we invoke linear constraints between them by the assumption
that some elements are inextensible and/or inflexible relative to others (note that a relative
stiffness ratio of about 1000 is sufficient to create such a condition).
• An inextensible element introduces one linear constraint equation between its end translation dofs. Such constraint can be conveniently expressed as an infinitesimal rotation about an instantaneous center of rotation.
30 of 218

• An inflexibile element introduces two linear constraint equations between its end translation and rotation dofs. As a result, the end node rotations are equal to the rotation of the element chord.
The treatment of linear constraints in structural analysis depends on the approach. In
computer analysis constraints are treated by the transformation method, the Lagrange multiplier
method, or the penalty method. We limit ourselves to the former. With the transformation
method it is possible to identify a set of independent free dof's under constrained conditions fU
among the original set of unconstrained free dof's fU . We can use the reduced row-echelon form
of the constraint equations to achieve this result automatically. At the end of the process we can
express it in the compact form
f c fU A U=
where cA represents the constraint transformation matrix. If we wish to express the element
deformations V in terms of the constrained free dof's fU , we can reach the goal in two steps
f f f c f f f= = =V A U A A U A U
fA is the compatibility matrix for the independent free dof's of the structural model in the
presence of linear constraints. In the absence of any constraints c =A I , the identity matrix, and
f f=A A .
For small structural models we can establish the constraint transformation matrix cA and the
compatibility matrix fA by geometric considerations. This is an important skill in that it allows
us to sketch deformed shapes and collapse mechanisms of structural models. To achieve this goal
we proceed in the following steps: for each independent free global dof
1. Set the displacement value of the particular independent free dof equal to 1
2. Set the displacement values of all other independent free dofs equal to 0
3. Proceed systematically element by element and identify the instantaneous center of rotation
of each element. It is helpful to note that the instantaneous centers of rotation of two
connecting elements and their common point lie on a straight line.
31 of 218

4. From the instantaneous center of rotation of each element, and the given unit value of the
selected independent free global dof we can determine the rotation value of the element
chords and the displacement values at all original (unconstrained) free global dofs.
5. The displacement values at all original (unconstrained) free global dofs establish the column
of the constraint transformation matrix cA for the selected independent free global dof.
6. The element deformations are equal to the negative of the rotation value of the element
chord, as long as end rotation dofs are not constrained. In the latter case, the constrained end
rotations need to be added to the element deformation of the corresponding end of the
element. This process establishes directly the column of the compatibility matrix fA for the
selected independent free global dof.
It is clear from the above discussion that in hand calculations the compatibility matrix fA for
the independent free global dof's is established directly and never by the product f cA A . The
latter approach is limited to computer calculations.
Displacements at restrained dof's also produce element deformations. Since the
displacements at the restrained dof's are given at the start of the analysis, it is not necessary to
resort to a compatibility matrix, unless we wish to identify each restrained dof contribution
separately. We determine the element deformations due to the restrained dofs with the same
process as described above for the free dofs. In this case, however, we impose the given support
displacement values (instead of unit values), while holding all independent free dof's equal to
zero. The resulting element deformations are denoted by dV . On account of the linearity of the
deformation-displacement relation we can express the element deformations for the case of linear
constraints by the superposition
f f dV A U V= +
In many instances we drop the tilde symbol for the sake of brevity, if the intent is clear from
the problem statement.
32 of 218

The compatibility relations are of purely geometric nature and hold for any material
response. In the case of axial or flexural releases we denote the deformations with hV . The sum
of element deformations and release deformations satisfy the compatibility relations, i.e.
h f f+ =V V A U . Once a collapse mechanism forms the element deformations V do not change,
because the basic element forces do not change, i.e. 0D =V with D denoting "increment of".
Noting that there are no release deformations at the locations of the structure without a plastic
hinge we can apply the compatibility relations for the displacement increments of the collapse
mechanism fDU (usually constrained by inextensibility conditions) and write
e fe f0D = = DV A U
where e denotes locations without a plastic hinge (e for elastic). These equations furnish
constraints between the free dof's of the collapse mechanism such that only one independent free
dof remains. We can use again the reduce row-echelon form of the compatibility matrix feA or a
geometric approach to establish the constraint compatibility matrix between the original set of
free dof's fDU and the single independent free dof of the plastic collapse mechanism fpDU . We
denote the matrix of this relation by cpA . With this we can write for the plastic deformation
increments of the collapse mechanism
h fp f fp cp fp fp fpD = D = D = DV A U A A U A U
where fpA is the compatibility matrix between plastic deformation increments and the single
independent free dof fpDU of the collapse mechanism. In hand calculations this relation can be
established directly by geometric considerations in the same fashion as was done earlier for
inextensible and inflexible elements.
From the above relations we conclude the following:
• The columns of the compatibility matrix fA or fA represent the elementary collapse mechanisms of the structural model.
• The column vector cpA contains the participation factors of the elementary collapse mechanisms in the final collapse mechanism of the structural model.
33 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #3 on Sept. 21, 2000
Problem (5 points)
Set up the compatibility relation fA between the global degrees of freedom 1U , 2U and 3U andthe member deformations in frame elements a and b.
a
b
31
2
8
6
34 of 218

35 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #3 on Oct. 2, 2003
Problem (5 points)
Under the assumption that the elements are inextensible the structural mechanism in the figure has two independent translation dofs, as shown. Determine the constraint compatibility matrix
cA relating the independent free dofs to the vertical and horizontal translation at nodes 2, 3 and 4.
1 2
3
4a
b c
d
5
6 8 8
10
6
2U
1U
1 2
3
4a
b c
d
5
6 8 8
2U
1U
36 of 218

37 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #2 on Sept. 26, 2002
Problem (5 points)
The model in the figure has two independent translation dofs, as, shown, under the assumptionthat the members are inextensible. Determine the compatibility matrix cA reflecting the relationbetween unconstrained and constrained translation dofs.
5 8
6
23
1
4
11U
2U
8
5 8
6
23
1
4
11U
2U
8
38 of 218

39 of 218

1
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #2 on Sept. 27, 2001
Problem (5 points)
The model in the figure has two independent translation dofs, as, shown, if the members areassumed inextensible. Determine the compatibility matrix cA reflecting the relation betweenunconstrained and constrained translation dofs.
8 8
12
12
6
1
2
1
2
34
5
8 8
12
12
6
1
2
1
2
34
5
40 of 218

41 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #4 on Sept. 28, 2000
Problem (5 points)
The mechanism in the figure with inextensible members has two independent global degrees offreedom, as indicated. Determine the horizontal and vertical displacement of node 3 for a unitdisplacement of each dof in turn.
a
b c
d
5 6
8
10
12
3
24
5
1
42 of 218

43 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #3 on Oct. 3, 2002
Problem (5 points)
Determine the compatibility matrix fA relating element deformations V to the independent free
global dofs fU of the structural model in the figure (the relation reads f fV A U= ). It is assumedthat all members are inextensible and that member c is, in addition, inflexible .
6 8 8
6
23
5
1
48
11U 2U
3U
a
b
c d
44 of 218

45 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #4 on Oct. 9, 2003
Problem (5 points)
The elements of the structural model in the figure can be assumed as inextensible. In addition, element b is inflexible. Under this condition there is only one independent free dof, the vertical translation at node 2. Determine the element deformations for a unit displacement at the independent free dof (compatibility matrix fA ). Determine also the element deformations dV for a vertical translation of the support at node 4 by 0.05 (positive = upward).
1
2
3
4
a b
c
8 8
0.05
1U
1
2
3
4
a b
c
8 8
10
6
1U
46 of 218

47 of 218

Final Examination Fall Semester 2003
1. Problem (4 points)
The structure in the figure has four independent free global degrees of freedom, if axial deformations are neglected in all members. Set up the appropriate columns of the structural compatibility matrix fA for the two translation degrees of freedom. What are the element deformations dV for the case that the support at node 4 settles vertically by 0.05 units?
1
2
3
4
8' 8'
6'
12'
a b
c
2U
1U
3U4U
1
2
3
4
8' 8'
6'
12'
a b
c
1U
1
2
3
4
8' 8'
6'
12'
a b
c
3U
48 of 218

49 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #3 on Oct. 4, 2001
Problem (5 points)
Determine the element deformations dV of the structural model in the figure for the case that thesupport at node 4 moves upward by 0.02. Under the assumption that all members areinextensible the model has 3 independent free global dofs, as shown.
10 8
6
9
a
b
c
0.02
1 2
3
4
1U
2U
3U
50 of 218

51 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #3 on Oct. 11, 2004
Problem
Determine the column of the structure compatibility matrix fA corresponding to the single independent free translation dof for the model in the figure under the assumption that all elements are inextensible. How do the values of this column of the compatibility matrix fA change if element b is in addition inflexible? How many independent free dofs does the model have in the latter case?
a
b
c
6 8
6
3
52 of 218

Final Examination Fall Semester 2004
1. Problem (3 points)
The structure in the figure has two independent free global degrees of freedom, if axial deformations are neglected in elements a through d and element c is, in addition, inflexible. Set up the structural compatibility matrix fA for the free dofs.
1 2
3
4a
b c
d
5
6 8 8
10
611U
e
1 2
3
4a
b c
d
5
6 8 8
10
6
2U
e
53 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #4 on Oct. 18, 2004
Problem
The figure shows the location of the plastic hinges at incipient collapse of the frame model. Is this a complete collapse mechanism? Determine the relation between the global dof translation increments and express it in a constraint compatibility matrix cpA . Determine the relation between the displacement increment at the single independent dof of the collapse mechanism and the plastic hinge rotation increments and express it in a compatibility matrix fpA (Hint: use the geometric method)
3 4.5
4
6
4
54 of 218

Virtual Work Principles
Principle of virtual work or virtual displacements
The principle of virtual work involves the equality between internal and external work. Work
is performed by a set of forces on an independent set of displacements and deformations.
Because of this causal independence we denote the set of displacements and the resulting work
as virtual. Consequently, the principle is also known as principle of virtual displacements. We
denote the virtual set of displacements and corresponding deformations by preceding the lower
case letter d to the variables. Limiting ourselves at first to nodal forces we can write for the
external virtual work
T Tf f d deW U P U Pδ δ δ= +
and the internal virtual work takes the form
TiW V Qδ δ=
The principle of virtual work states:
If a structure is in a state of equilibrium, then the external virtual work is equal to the internal
virtual work under any set of virtual displacements that satisfy the conditions of compatibility.
This is a necessary and sufficient condition meaning that the reverse is also true, i.e. if the
external work of the applied forces is equal to the internal work of some basic element forces for
all sets of virtual displacements and deformations that satisfy the conditions of compatibility,
then the applied forces are in equilibrium with the basic element forces.
In practice we use the principle of virtual work for determining individual force values and,
later on, individual stiffness coefficients in hand calculations (Note that a stiffness coefficient
ijK is the force at dof i due to a unit displacement at free dof j only). To this end we select a
virtual displacement field with a unit displacement value at the particular dof of interest and zero
values at all other dof's. The corresponding deformations can be determined with the methods of
the preceding section. In the process we simplify the compatibility problem as much as possible
by introducing constraints among the global dof's, so as to eliminate certain element forces from
the internal work. For example, in order to eliminate the contribution of axial forces we select a
virtual displacement field with zero virtual axial deformations.
55 of 218

The external work of element loads can be obtained by integration of the inner product of
element forces with corresponding virtual displacements over the element length and summation
over all elements. Alternatively, we express the element loads through equivalent end forces that
get assembled into nodal forces fwP due to element loads. In the latter case we write for the
external virtual work
( )T Tf f fw d deW U P P U Pδ δ δ= − +
Principle of complementary virtual work or virtual forces
The principle of complementary virtual work or virtual forces involves a set of displacements
and their compatible deformations and an independent set of applied forces and the basic element
forces in equilibrium with these. The forces represent the virtual set that has no causal relation
with the real displacement/deformation set. We call the work complementary and have for the
external complementary virtual work
T Tf f d deW P U P Uδ δ δ= +
and for the internal complementary virtual work
TiW Q Vδ δ=
The principle of complementary virtual work states:
If a structure is in a state of compatible deformation, then the external complementary virtual
work is equal to the internal complementary virtual work under any set of virtual forces that
satisfy equilibrium. This is a necessary and sufficient condition meaning that the reverse is also
true, i.e. if the external complementary virtual work of the virtual forces is equal to the internal
complementary virtual work of the corresponding virtual basic element forces for all sets of
virtual applied forces and corresponding element forces in equilibrium, then the actual
deformations and the global dof displacements are compatible.
In practice we use the principle of virtual forces for determining individual displacement
values and, later on, individual flexibility coefficients in hand calculations (Note that a flexibility
coefficient ijF is the displacement at dof i due to a unit force at free dof j only). To this end we
select a virtual force field with an applied unit force value at the particular dof of interest and
zero values at all other dof's. We select a set of basic element forces in equilibrium with the unit
56 of 218

force. The simplest set of basic element forces (i.e. with the most zero values in basic force
vector Q ) is the most convenient choice, because it involves the least amount of arithmetic
operations for determining the internal virtual work. Because of the presence of a unit applied
force at the dof of interest, the principle of virtual forces is sometimes called the dummy unit
load method.
Plastic work increment and upper bound theorem of plastic analysis
Once the collapse load factor is reached and the structural model forms a complete or partial
collapse mechanism the plastic work increment of the external forces on the corresponding
displacement increments of the collapse mechanism is
( )Tf fpeW lD = DU P
The internal work increment of the basic element forces on the plastic deformation increments is
a bit harder to express. Because plQ represents the absolute values of the plastic capacity of the
elements, we need to distinguish between positive and negative plastic deformation increments
and change the sign of the latter. We define these as follows
pl pl pl plif 0 otherwise 0V V V V+ +∆ = ∆ ∆ > ∆ =
pl pl pl plif 0 otherwise 0V V V V− −∆ = −∆ ∆ < ∆ =
With this definition the internal plastic work increment becomes
pl pl pl plpiW + + − −∆ = ∆ + ∆Q V Q V
The superscript + or - denotes the location with a positive or negative plastic deformation
increment, respectively. The equality of work requires that pe piW WD = D . The upper bound
theorem of plastic analysis states that the collapse load factor cl can be determined by finding
the collapse mechanism that produces the smallest plastic work increment. In compact form we
can write this as
( )T
f f pl pl pl pl
pl pl f f pl pl
min for
and 0, 0c U P Q V Q V
V V A U V V
λ λ λ + + − −
+ − + −
= ∆ = ∆ + ∆
∆ −∆ = ∆ ∆ ≥ ∆ ≥
It turns out that this is the dual linear programming problem to the lower bound theorem. Thus,
both formulations produce the same answer, i.e. a unique collapse load factor for the structural
model under the given applied force pattern.
57 of 218

Midterm Examination #2 Fall Semester 2004
3. Problem (3 points)
Determine the collapse load factor λ of the structural model in the figure under the given loading. The plastic hinge locations at incipient collapse are indicated as gray circles in the figure. The flexural plastic capacity of the vertical elements (a, b and e) is 200 units, that of element d is 150 units and that of element c is 100 units. The cable element f has an axial plastic capacity of 150 units.
50
70
a
b
c
de
f
1
2
3
4
5
6
6 6
6
6
8
58 of 218

59 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #5 on Oct. 5, 2000
Problem (5 points)
The truss in the figure is subjected to a thermal extension of members 3, 4, 5 and 6 by 45 10−⋅ . Themember properties are elastic modulus of 20,000 and area of 10. The forces in the members underthe given loading are given in the following table.
Determine the horizontal displacement at node 3 and 4.
1 2
34
5
1
2
34
5
6
7
8 9
16
12
Elem EA Axial force 1q1 200,000 46.302 200,000 34.723 200,000 -57.874 200,000 05 200,000 -57.876 200,000 07 200,000 34.728 200,000 46.309 200,000 46.30
60 of 218

61 of 218

Midterm Examination #2 Fall Semester 2004
4. Problem (4 points)
Determine the vertical translation at node 4 of the following structural model for the given loading under the assumption that elements a-d are inextensible and have flexural section stiffness EI=50,000, while the axial stiffness of elements e and f is EA=80,000. Under the given loading that axial force in elements e and f is 5 136.8= -Q and 6 174.0= -Q , respectively. The moment at the end of element c at node 3 is equal to zero (i.e. 3 0=Q ).
1
2
34
8 8
6
5
6
a b
c
d
e f
55w=20
62 of 218

63 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #5 on Oct. 16, 2003
Problem (5 points)
The element deformations of the following structure for a particular load case are supplied in deformation vector V . Each element has one deformation only: elements a, b and c a flexural deformation at node 3, because axial deformations are negligible, and elements d and e an axial deformation. Determine the rotation at node 3.
0.001470.00533
0.005160.013890.01771
Ê ˆÁ ˜-Á ˜
= Á ˜Á ˜-Á ˜Á ˜-Ë ¯
V
1
2
3 4
8 8
6
5
6
a
b
c
d e
64 of 218

65 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #4 on Oct. 10, 2002
Problem (5 points)
The structure in the figure has inextensible members a through d and cable elements f and g.The element deformations are reported from lower to higher numbered node for each member.Determine the rotation at node 5 under the following deformations.
( ) 3 ( ) 3 ( ) 3 ( ) 3
( ) 3 ( ) 3 ( ) 3
1.0311 1.5369 -0.1836 -1.0535 10 10 10 10
-2.0622 0.6669 -1.0535 -0.7635
0.666910 13.5255 10 10.9484 10
0.9568
a b c d
e f g
- - - -
- - -
Ê ˆ Ê ˆ Ê ˆ Ê ˆ= ◊ = ◊ = ◊ = ◊Á ˜ Á ˜ Á ˜ Á ˜Ë ¯ Ë ¯ Ë ¯ Ë ¯
Ê ˆ= = ◊ = ◊Á ˜Ë ¯
v v v v
v v v
a b
c
1 23
4 5
12 9
9d
e
f g
66 of 218

67 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #4 on Oct. 11, 2001
Problem (5 points)
The frame in the figure is subjected to nodal forces that yield the following total deformationvector V . The element connectivity is as follows: 1-2, 2-3, 3-4, 3-5. Determine the horizontaldisplacement at node 2.
0.00007989 -0.00071976 0.00143951 -0.00017339 -0.00193450 0.00027022 -0.00011417 0.00277420 -0.00138710 0 0.00023940 -0.00011970
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎜⎜⎜⎜⎝ ⎠
V
⎟⎟⎟⎟
6
10 10
8a
b
c
d
1
2 3
4
5
68 of 218

69 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #5 on Nov. 1, 2004
Problem
Determine the rotation at nodes 3 and 4 of the structure in the figure for the following element deformations. The deformation numbering is shown in italic font in the figure.
0.01626881990641-0.02169175987521 -0.18221325038947
Ê ˆÁ ˜=Á ˜Ë ¯
V
6 8
8
12
34
12
3
70 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 1
Element Deformation-Force
and Force-Deformation Relations
Truss element
0 0
03 6
06 3
LEA
L LEI EIL LEI EI
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
f
2 0q = 3 0q =
EAL
k ⎡ ⎤= ⎢ ⎥⎣ ⎦
i jL
1q1q
71 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 2
Uniform, prismatic 2d frame element
0 0
03 6
06 3
LEA
L LEI EIL LEI EI
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
f
Flexibility relation
v f q= i
L
2 1q =3
LEI
6LEI
3 1q =6LEI 3
LEI
1 1q =
LEA
j1
1L 1
L
1L 1
L
2q 3q1q
Element stiffness for uniform, prismatic 2d frame element
1q f v kv−= =
Stiffness relation
1
0 0
4 20
2 40
EAL
EI EIL LEI EIL L
−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥= =⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
k f
L
2 1v =
3 1v =
4 EIL
4 EIL
2 EIL
2 EIL
i j
1 1v =
EAL
72 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 3
Initial deformations due to thermal effect
0a aTε α∆=
( )0
b tT T Th h
α ακ∆ ∆ ∆∆−
= =
by integration of uniform axial strain and curvature
0
0 0
0
12
12
a L
L
L
ε
κ
κ
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟= −⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
v
other non-mechanical effects are similar!
x
reference axis
temperature increment
h
beam elementx
thermal field
L
i j
∆Tt
∆x
aTD
∆Tb
∆Tt
∆Tb
Lx
0 0( ) const=xκ κ=
02v03v
01v
0 0( ) const=a axε ε=
Initial (fixed-end) forces for frame due to non-mechanical effects
0 0= −q k v
for uniform, prismatic element
00
0 0 0
00
0 0
4 2 102
2 4 102
aa
EALL EA
EI EI L EIL L
EIEI EI LL L
ε εκ κ
κκ
⎡ ⎤ ⎛ ⎞⎢ ⎥ ⎜ ⎟ −⎛ ⎞⎢ ⎥ ⎜ ⎟
⎜ ⎟⎢ ⎥ ⎜ ⎟= − − = ⎜ ⎟⎢ ⎥ ⎜ ⎟ ⎜ ⎟−⎝ ⎠⎢ ⎥ ⎜ ⎟⎜ ⎟⎢ ⎥ ⎝ ⎠⎣ ⎦
q
No shear forces due to restraint moments !
0 0( ) const=xκ κ= 0EIk
0 0( ) const=a axε ε=0aEAε 0aEAε
L
0EIk
73 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 4
Initial deformations due to uniform transverse distributed load
3
0 w
3
0
24
24
y
y
w LEI
w LEI
v v
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟= = −⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
Flexibility relation
with for downward wy0v f q v= +
02v
L
yw
2yw L
2yw L
03v
x
( )p xκ2
8yw LEI
yw
Initial (fixed-end) forces due to uniform transverse distributed load
( )10 0q f v v k v q−= − = +
Stiffness relation
0v f q v= +
Flexibility relation
3 2
0 0
3 2
0 0 0 0
4 2024 12
2 4024 12
y y
y y
EAL
w L w LEI EIL L EIEI EI w L w LL L EI
q k v
⎛ ⎞ ⎛ ⎞⎡ ⎤⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥= − = − − =⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟⎢ ⎥ −⎜ ⎟ ⎜ ⎟⎣ ⎦ ⎝ ⎠ ⎝ ⎠
yw2
12yw L2
12yw L
2yw L
2yw L
L
74 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 5
2d frame element with moment release at node j (flexibility relation)
1 1
2 2
0
03
LEA
LEI
⎡ ⎤⎢ ⎥⎛ ⎞ ⎛ ⎞
= = =⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥
⎣ ⎦
v qv f q
v q
0 0
03 6
06 3
LEA
L LEI EIL LEI EI
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥= −⎢ ⎥⎢ ⎥
−⎢ ⎥⎣ ⎦
f
3 0q =
3 212
v v= −and
L
2 1q =3
LEI 6
LEI
1 1q =
LEA
i j
1
1L 1
L
3v
2d frame element with moment release at node j (stiffness relation)
1 1
2 2
0
30
EAL
EIL
⎡ ⎤⎢ ⎥⎛ ⎞ ⎛ ⎞
= = =⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥
⎣ ⎦
q vq k v
q v
L
i j
312
= -v2 1v =
3 EIL
1 1v =
EAL
75 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 6
Fixed-end forces of 2d frame element with moment release
( )10 0q f v v k v q−= − = +
Stiffness relation
0v f q v= +
Flexibility relation
0
00
12
a L
L
ε
κ
⎛ ⎞⎜ ⎟=⎜ ⎟−⎝ ⎠
v0 0
0 00 0
01 330 2 2
a aEA L EAL
EI L EIL
ε ε
κ κ
⎡ ⎤ −⎛ ⎞ ⎛ ⎞⎢ ⎥ ⎜ ⎟ ⎜ ⎟= − = − =⎢ ⎥⎜ ⎟ ⎜ ⎟−⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
q k v
for non-mechanical effects
Note shear forces due to restraint moments !
01.5 EIk
01.5EILk 01.5EI
Lk
0 0( ) const=xk k=
Fixed-end forces of 2d frame element with moment release
30
0
24yw LEI
v⎛ ⎞⎜ ⎟= ⎜ ⎟−⎜ ⎟⎝ ⎠
230 0
000
30 824yy
EAL
w Lw LEIEIL
q k v
⎡ ⎤ ⎛ ⎞⎛ ⎞⎢ ⎥ ⎜ ⎟⎜ ⎟= − = − =⎢ ⎥ ⎜ ⎟⎜ ⎟−⎜ ⎟ ⎜ ⎟⎢ ⎥ ⎝ ⎠ ⎝ ⎠⎣ ⎦
( )10 0q f v v k v q−= − = +
Stiffness relation
0v f q v= +
Flexibility relation
Note shear forces due to restraint moments !
for uniform transverse load
yw
2
8yw L
2yw L
L
2yw L
8yw L
8yw L
yw
2
8yw L
2yw L
2yw L
8yw L
8yw L
76 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 7
Complete set of stiffness coefficients for beam element
from
we derive
4 2
2 4
EI EIL LEI EIL L
q v
⎡ ⎤⎢ ⎥
= ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
1
1L
L
v
⎛ ⎞⎜ ⎟
= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
2
2
6
6
EILEIL
q
⎛ ⎞⎜ ⎟
= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
10
v ⎛ ⎞= ⎜ ⎟⎝ ⎠
4
2
EILEIL
q
⎛ ⎞⎜ ⎟
= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
1
1L
L
v
⎛ ⎞−⎜ ⎟= ⎜ ⎟⎜ ⎟−⎜ ⎟⎝ ⎠
2
2
6
6
EILEIL
q
⎛ ⎞−⎜ ⎟= ⎜ ⎟⎜ ⎟−⎜ ⎟⎝ ⎠
01
v ⎛ ⎞= ⎜ ⎟⎝ ⎠
2
4
EILEIL
q
⎛ ⎞⎜ ⎟
= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠ L
26 EIL
26 EIL
312 EIL 312 EI
L
4 EIL 2 EI
L26 EI
L
26 EIL
312 EIL312 EI
L
26 EIL
26 EIL
4 EIL
2 EIL
26 EIL
26 EIL
1
1
1
1
Initial forces of beam element
non-mechanical effects
uniform transverse load
recall that end deformations are zero!
0q k v q= +
yw2
12yw L2
12yw L
2yw L
2yw L
0 0( ) const=xk k=0EIk0EIk
L
77 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 8
Complete set of stiffness coefficients for beam element with moment release
from
we derive
3EIL
q v⎡ ⎤= ⎢ ⎥⎣ ⎦
1L
v ⎛ ⎞= ⎜ ⎟⎝ ⎠ 2
3EIL
q ⎛ ⎞= ⎜ ⎟⎝ ⎠
( )1v =3EI
Lq ⎛ ⎞= ⎜ ⎟
⎝ ⎠
1L
v ⎛ ⎞= −⎜ ⎟⎝ ⎠ 2
3EIL
q ⎛ ⎞= −⎜ ⎟⎝ ⎠
L
3 EIL
23 EIL
23 EIL
23 EIL
33 EIL 33 EI
L
33 EIL33 EI
L
23 EIL
1
1
1
Initial forces of beam element with moment release
non-mechanical effects
uniform transverse load
0q k v q= +
yw
2
8yw L
2yw L
L
2yw L
8yw L
8yw L
01.5 EIk
01.5EILk 01.5EI
Lk
yw
2
8yw L
2yw L
0 0( ) const=xk k=
L
2yw L
8yw L
8yw L
78 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 9
From Material to Section to Element to Element Collection to Structure
A Journey through Force-Deformation Relations
Integration from material point to section
Stiffness relationsFlexibility relations
material point 0 0m Eσε ε ε ε= + = + ( )0Eσ ε ε= −
integrate over section (Bernoulli)(reference axis at centroid!)
0
0
00
a aN EAM EI
ε εκ κ
⎛ ⎞⎛ ⎞ ⎡ ⎤ − ⎟⎟ ⎜⎜ ⎢ ⎥= ⎟⎟ ⎜⎜ ⎟⎟⎟ ⎟⎜⎜ ⎢ ⎥ −⎝ ⎠ ⎝ ⎠⎣ ⎦
0
0
1 0
10
aa NEAM
EI
εεκκ
⎡ ⎤⎢ ⎥ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎢ ⎥ ⎟⎟ ⎟ ⎜⎜ ⎜= + ⎟⎟ ⎟ ⎜⎜ ⎜⎢ ⎥ ⎟⎟ ⎟⎟ ⎟ ⎟⎜⎜ ⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎢ ⎥⎢ ⎥⎣ ⎦
s 0( ) ( ) ( ) ( )x x x x= +e f s e [ ]s 0( ) ( ) ( ) ( )x x x x= −s k e e
or, in compact form
0Eσ ε σ= +or
section
79 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 10
Integration from section to element deformations
section s 0( ) ( ) ( ) ( )x x x x= +e f s e
Stiffness relationsFlexibility relations
or, in compact form
0v f q v= +
integrate over element
10
L
a dxv ε=∫
( )20
1 L
L x dxL
v κ=− −∫
30
1 L
x dxL
v κ= ∫
( )10q f v v−= − 0q kv q= +or
element
Collection of all element force-deformation relations
Stiffness relationsFlexibility relations
element 0q kv q= +0v f q v= +
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
aa a a0
bb b b0
cc c c0
nene ne ne0
0 0 0 0
0 0 0 0
0 0 0 00 0 0 0
0 0 0 0
qq k v
qq k v
qq k v
qq k v
⎛ ⎞⎛ ⎞ ⎡ ⎤⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥= + ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥
⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎣ ⎦⎝ ⎠ ⎝ ⎠
elementcollection
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
aa a a0
bb b b0
cc c c0
nene ne ne0
0 0 0 0
0 0 0 0
0 0 0 00 0 0 0
0 0 0 0
vv f q
vv f q
vv f q
vv f q
⎛ ⎞⎛ ⎞ ⎡ ⎤⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥= + ⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥⎜ ⎟⎜ ⎟ ⎜ ⎟⎢ ⎥
⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎣ ⎦⎝ ⎠ ⎝ ⎠
or, in compact form
s 0V F Q V= + s 0Q K V Q= +
or, in compact form
80 of 218

© Filip C. Filippou, 2000
Force-Deformation Relations 11
Force-deformation relations: from material point to structure
Stiffness relationFlexibility relation
( )0Eσ ε ε= −material point
s 0( ) ( ) ( ) ( )x x x x= +e f s esection
element 0q kv q= +0v f q v= +
0 0m Eσε ε ε ε= + = +
[ ]s 0( ) ( ) ( ) ( )x x x x= −s k e e
s 0V F Q V= + s 0Q K V Q= +elementcollection
f f f0P KU P= +f f f0U FP U= +structure
81 of 218

Displacement Method
In the displacement method of analysis the unknowns of the analysis problem are the
displacement values fU at the free dof's of the structural model. The equilibrium equations
furnish as many equations as unknowns. The sequence of steps is
Tf f fw
s 0
f f d
EquilibriumForce-deformationCompatibility
= += += +
P A Q PQ K V QV A U V
by substituting the compatibility relation into the force-deformation relation, and the latter into
the equilibrium equation we can express the equilibrium equations in terms of the unknown
displacements at the free dof's of the problem, i.e.
f ff f f0P K U P= +
where ffK is the stiffness matrix of the structural model, which can be determined from
T
ff f s fK A K A=
and f0P is the initial force vector with three contributions
T Tf0 f s d f 0 fwP A K V A Q P= + +
the effect of displacements at free dofs, the effect of initial basic element forces, and the effect of
element loads on the dependent element end forces. We note from the above equation that the
stiffness matrix is symmetric of size nf x nf, where nf is the number of free dof's of the model.
A physical interpretation of the displacement method is that the final state of the structural
model is made up of nf+1 compatible states (for the nf free dof displacements plus the initial
state) that together satisfy equilibrium, even though individually they do not.
It is obvious from the above that the determination of the compatibility matrix fA for the
free dof's of the structural model is key to the determination of structure stiffness matrix and
initial force vector.
Hand calculations involve the determination of particular stiffness coefficients and the
determination of the initial force vector in the presence of element loading or support
82 of 218

displacements. This is usually required in structural models with constrained dof's. In such case
the principle of virtual displacements furnishes the perfect tool. Thus, to determine the structure
stiffness coefficient mnK we need to determine the force at dof m due to a unit displacement at
dof n. We proceed as follows:
1. We determine the element deformations under a unit displacement at dof n with all other
dof's equal to zero. We denote these deformations with nV . We realize, of course, that they
are equal to the n-th column of the compatibility matrix fA .
2. We determine the element forces nQ due to deformations nV . Even though symbolically we
can write in compact form n s n=Q K V we perform this determination element by element,
i.e. according to =q kv with the element stiffness matrix of each element according to the
preceding section on force-deformation relations.
3. We determine the virtual element deformations mdV under a unit virtual displacement at dof
m. With this we invoke the principle of virtual displacements and write
Tm nmn d=K V Q
For the initial force vector the procedure is analogous, but we discuss the following two cases
explicitly: (a) for element loading we determine the initial basic force vector 0Q and the nodal
force vector fwP due to the effect of element loads on the dependent end forces. Then the initial
force vector becomes
Tf0 f 0 fwP A Q P= +
Note that in the presence of constraints we need to be careful. The compatibility matrix for
the free dof's in the above equation should be equal to fA , but we should also remember to
transform the nodal forces to the constrained dof's according to
T Tf0 f 0 c fwP A Q A P= +
(b) for displacements at restrained dof's we determine the element deformations dV due to the
given value of the support displacement(s) in a similar way to step 1 above. We then proceed
exactly in the same way as steps 2 and 3, noting that the final outcome will be the initial force at
83 of 218

dof m due to the given support displacement(s). If we are interested in the complete initial force
vector, then we use
Tf0 f dP A Q=
where dQ are the element forces due to deformations dV . In the presence of constraints we use
the appropriate compatibility matrix, i.e. fA
Tf0 f dP A Q=
For the complete solution of the response of a given structural model under given loading we
proceed as follows:
1. Set up the equilibrium equations in terms of the unknown displacements at the free dof's of
the model.
f ff f f0P K U P= +
To this end we need to set up the compatibility matrix fA and determine the stiffness matrix
and initial force vector. In the presence of linear constraints the system of equilibrium
equations becomes
f ff f f0P K U P= +
2. Solve the linear system of equations and determine the displacements at the free dof's for the
given loading.
3. With the free dof displacements determine the element deformations from the compatibility
relations, i.e.
f f d f f dor= + = +V A U V V A U V
4. With the element deformations determine the element forces from the element force-
deformation relation 0= +q kv q .
5. With the element forces determine the support reactions from the equilibrium equations at
the restrained dof's.
6. Check global equilibrium of the complete structural model free body.
84 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #7 on Oct. 19, 2000
Problem (5 points)
All members have axial stiffness EA=10,000. Member c is heated up by 310Tα∆ −= . Determinethe structure stiffness matrix coefficients 11K , 12K and 32K as well as the initial forcecomponents 01P and 02P .
6 6
8
4
10
a b
c
d
1
2
3
85 of 218

86 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #6 on Nov. 8, 2004
Problem
Under the assumption that all elements are inextensible the structural model in the figure has four independent free dofs. All elements have flexural section stiffness EI. Determine the stiffness coefficients 11K , 33K , 14K and 32K . Set up the complete initial force vector under the uniformly distributed element load.
6 8
8
5
w=5
2U
1U
3U
4U
87 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #6 on Oct. 30, 2003
Problem (5 points)
The structural model in the figure has 4 independent free global dofs under the assumption that axial deformations are neglected in elements a through e. Determine the stiffness coefficients 11K , 13K and 34K in terms of given dimensions, the flexural stiffness EI of elements a through e (each one different) and the axial stiffness EA of element f. Determine the initial force vector f0P for two load cases separately: a uniformly distributed downward load of 10 units in element d and an initial curvature 3
0 10k -= in element c (the right side is hotter). For the latter assume that the flexural stiffness EI of element c is equal to 80,000.
a b
c
d
e
1
2
3
4
6 4
4
6
w=10
0κ f
88 of 218

89 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #5 on Oct. 24, 2002
Problem (5 points)
The structural model in the figure has 4 independent free global dofs under the assumption thataxial deformations are neglected in members a through d.
Determine stiffness coefficients 22K , 23K , 14K and 24K in terms of the given dimensions, theflexural stiffness EI of members a through d and the axial stiffness EA of members e and f.Determine the initial force vector f0P for the given uniformly distributed element load.
8 8
6
a
b
cd
ef
1
2
3 4
5
w=5
90 of 218

91 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #5 on Oct. 25, 2001
Problem (5 points)
The structural model in the figure has 5 independent free global dofs under the assumption thataxial deformations are negligible. Determine the stiffness coefficients 21K , 44K and 45K . Theflexural stiffness of all members is EI. Determine the second and third component of the initialforce vector f0P , i.e. f02P and f03P .
a
b
c
d
2
12 8
15
10
1
2
3
45
92 of 218

93 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #8 on Oct. 26, 2000
Problem (5 points)
All members have flexural stiffness EI=5,000. Axial deformations can be neglected. Determine thecoefficients 22K , 12K and 32K of the structure stiffness matrix and the initial force components
01P , 02P and 04P .
a
b
c
d
2
12 8
15
102
1
2
3
45
94 of 218

95 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #7 on Nov. 6, 2003
Problem (5 points)
The structural model in the figure has 5 independent free global dofs under the assumption that axial deformations are neglected in elements a through d. The degree of freedom numbering is shown. Determine the stiffness coefficients 33K , 31K and 34K in terms of the given dimensions and the flexural stiffness EI of elements a through d. The ICs for the translation dofs are supplied. Determine the initial force vector f0P for a distributed load of 5 units on element b.
8 8
12
12
6
1
a
b
c
d
3
2
4 5w=5
1
a
b
c
d
ICb
ICc
ICa
3
a
b
c
d
ICc
ICb
ICd
96 of 218

97 of 218

Final Examination Fall Semester 2003
2. Problem (4 points)
The structure in the figure has four independent free global degrees of freedom (DOFs), if axial deformations are neglected in all members. The flexural stiffness of all members is EI. The instantaneous centers of rotation for each translation DOF are provided in the following figures. You are asked to determine the following terms of the structure stiffness matrix ffK : 11K , 14K and 31K . You are also asked to determine the initial force vector f0P for the given uniformly distributed loading in element c.
5 8
6
2 3
14
8 w=5a
b
c
2U
1U3U
4U
ICb
ICc
ICa
a
b
c
1U
4U
ICb
ICa
ICc
98 of 218

99 of 218

100 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #6 on Oct. 31, 2002
Problem (5 points)
The structural model in the figure has 5 independent free global dofs under the assumption thataxial deformations are neglected in all members. The model is subjected to a concentratedhorizontal force of 15 units and a uniform load of 4 units in member d. Determine the stiffnesscoefficients 11K , 13K 53K , and the applied force ( fP ) and initial force ( f0P ) components fordofs 1 and 3. The flexural stiffness of all members is EI.
6
68
a b c
12
3
4
d5
w=4
15
6
68
a b c
1d
ICa ICb
ICd
ICc at ∞
6 a b c
3
dICb ICc
ICa
ICd
101 of 218

102 of 218

Final Examination Fall Semester 2002
2. Problem (6 points)
The structure in the figure has four independent free global degrees of freedom, if axial deformations are assumed negligible in all members. In the displacement method of analysis the equilibrium equations at these dofs take the form f ff f0fP K U P= + . You are asked to determine the following terms of the stiffness matrix ffK : 11K , 13K and 12K . In order to identify the contribution of each member to these coefficients you should assume that each member has distinct flexural stiffness: aEI , bEI etc.
You are also asked to determine the terms of the initial force vector f0P for the given loading.
2U
1U
3U
4U
8 8 5
6
a b
c
d
w=5
103 of 218

104 of 218

105 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #6 on Nov. 1, 2001
Problem (5 points)
The structural model in the figure has 3 independent free global dofs under the assumption thataxial deformations are negligible. Determine the stiffness matrix K and the applied and initialforce vectors fP and f0P , respectively, for the global equilibrium equations f f f0= +P K U P . Theflexural stiffness of all members is EI. Note that for the translation dof 1 the instantaneous centerof rotation for members b and c lies at node 4 and the instantaneous center of rotation formember a lies at node 1.
8 6 6
8
2
3
4a
b c
1
1
2
3
w=3
106 of 218

107 of 218

Final Examination Fall Semester 2000
2. Problem (8 points)
The structure in the figure has five independent free global degrees of freedom, if axial deformations are neglected. You are asked to determine the columns of the structure compatibility matrix fA that correspond to the translation degrees of freedom 2 and 4 and the stiffness coefficients 22K , 42K and 44K , if the flexural stiffness of the members is EI.
For the case that the right support moves up by 0.05 units determine the basic element deformations dV .
6 6 6
8
10
a b c
d
1
2
3
4
5
108 of 218

Final Examination Fall Semester 2000
3. Problem (4 points)
In the displacement method of analysis the equations of equilibrium at the global degrees of freedom are 0= +f ff f fP K U P . Set up the vectors fP and 0fP for the structure and loading in the following figure, under the assumption that axial deformations are negligible.
w=5
8
66
a b
c1
2
34
15
109 of 218

Final Examination Fall Semester 2001
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2001 Instructor: Filip C. Filippou
Name: ______________________________
CE 220 – Structural Analysis, Theory and Applications
Final Examination on Dec. 20, 2001
TOTAL = 40 points
1. Problem (4 points)
Under the assumption that all members are inextensible the structure in the figure has 5 independent free dofs. The flexural stiffness of all members is EI. Determine the stiffness coefficient 24K .
5 8 8
6
23
5
1
4
1U2U
3U
4U5U
8
110 of 218

111 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #9 on Nov. 2, 2000
Problem (5 points)
All members have flexural stiffness EI=5,000. Axial deformations can be neglected. Determine thecoefficients 11K , 21K and 31K of the structure stiffness matrix and the initial force vector 0fP forthe case that the left support moves upward by 0.01 units.
8 8
610
a b
c
10.01
12
3
112 of 218

113 of 218

Midterm Examination #2 Fall Semester 2004
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Theory of Structures
Midterm Examination #2 on Nov. 23, 2004 (20 points)
1. Problem (8 points)
The structural model in the figure is loaded with a uniform load of 5 units in element a and a concentrated moment of 100 units at node 3. All elements are inextensible with flexural section stiffness EI=50,000 except for element b which is inflexible. Under these conditions the model has two independent free dofs, as shown. The instantaneous centers of rotation for each independent free dof displacement are supplied. Determine the stiffness coefficients, the applied force vector and the initial force vector for the independent free dofs.
a
b
c
d
w=5
100
1 2
3
4
5
1U
2U
10 8 5
9
6
a
b
c
d
a
b
c
d
ICaICb
ICc ICc
ICb
ICd
1U
2U
114 of 218

115 of 218

116 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2004 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #7 on Nov. 15, 2004
Problem
Under the assumption that all elements are inextensible and that element b is inflexible the structural model in the figure has two independent free dofs. Elements a and c have flexural section stiffness EI. Determine the stiffness coefficients and set up the initial force vector under the uniformly distributed element load.
8 8
610
a b
c
1
2w=5
117 of 218

118 of 218

119 of 218

Final Examination Fall Semester 2001
2. Problem (8 points)
Under the assumption that all members are inextensible and that member b is, in addition, inflexible, the structure in the figure has only one independent free dof. For the case that the flexural stiffness of the other members is EI=20,000 determine 1U and the basic forces in all members (note that the instantaneous centers of rotation are supplied). Draw the bending moment diagram indicating all extreme values. Use the principle of virtual displacements to determine the vertical support reaction at node 5.
10
12
10
10
a
b
c
d
1
2
34
5
1U
w=8
ICd
ICb
120 of 218

121 of 218

122 of 218

Midterm Examination #2 Fall Semester 2004
2. Problem (5 points)
The structural model in the figure has only two independent free dofs under the assumption that all elements are inextensible and element b is, in addition inflexible. The instantaneous centers of rotation for each independent free dof displacement are supplied. The flexural section stiffness EI of elements a and c is equal to 50,000 units. Determine the initial force vector for the case that the support at node 4 displaces downward by 0.05 units.
8 8
610
a b
c
1U
2U
1
2
3
4
a b
c
1U1
2
3
4
a b
c2U
1
2
3
4
ICaICb
ICc
ICa
ICc
ICb
123 of 218

124 of 218

Final Examination Fall Semester 2004
2. Problem (5 points)
The structure in the figure has two independent free global degrees of freedom (DOFs), if axial deformations are neglected in all elements and element b is inflexible. The flexural stiffness of all members is EI. The instantaneous centers of rotation for each free DOF are provided in the following figures. You are asked to determine all terms of the structure stiffness matrix. You are also asked to determine the initial force vector f0P for the given uniformly distributed load w in element c, and, separately, for the horizontal translation of node 5 by 0.10 units to the left.
6 8 8
6
23
5
1
48
11U
a
b
c d
ICa
ICb
ICc
6
23
5
1
48
2U
a
b
c d
6 8 8
ICa
ICc
ICd
125 of 218

Final Examination Fall Semester 2004
6 8 8
6
23
5
1
48
11U
2U
a
b
c d
w
6 8 8
6
23
5
1
48
11U
2U
a
b
c d
0.10
126 of 218

Force-deformation relations for statically determinate substructures
We return to the three basic relations for linear elastic structural models, i.e.
f f fw
s 0
f f
EquilibriumForce-deformationCompatibility
= += +=
P B Q PQ K V QV A U
where we have left out the effect of support displacements in the interest of simplicity. We
rewrite the element force-deformation relation in its flexibility form, i.e.
s 0Deformation-force = +V F Q V
We have established that in stable, statically determinate structures the equilibrium matrix fB is
square and invertible, as is the case for the compatibility matrix, since Tf f=B A always. In this
special case it is possible to invert both the equilibrium and the compatibility relations above and
write
( )f fw
-1 Tf f
from equilibrium
from compatibility
= -
= =
Q B P P
U A V B V
where we have made use of the force influence matrix B as the inverse of the equilibrium matrix
fB for the free dof's of the structural model. The second relation can be also derived directly by
application of the principle of virtual forces. We put the three basic relations together according
to
( )f fw
s 0-1 T
f f
from equilibriumDeformation-force
from compatibility
= -= +
= =
Q B P PV F Q V
U A V B V
After substituting the first in the second and then in the third relation we obtain
( )( )( )
Tf s 0
T Ts f fw 0
Tf 0 fw
f f0
= +
= - +
= + -
= +
U B F Q V
B F B P P B V
F P B V FP
F P U
where Ts=F B F B is the structure flexibility matrix and f0U is the initial displacement vector. It
is obvious from the expression Ts=F B F B that the flexibility matrix is a square, symmetric
127 of 218

matrix. The flexibility coefficient mnF represents the displacement at dof m due to a unit force at
dof n. The above displacement-force relation is the inverse of the force-displacement relation of
the stiffness method and serves two important functions:
(a) it is much easier to obtain "by hand" for statically determinate structures with many
independent free dof's (truss structures are a good example), particularly, if the dof's of interest
(the non-zero entries in vector fP are few), and
(b) it can be used to derive the force-deformation relation of statically determinate substructures.
Such substructures can then be used as elements in a structural model that is composed of several
substructures. The approach is described briefly in the following for statically determinate
substructures. Statically indeterminate substructures will be discussed in the course.
In a statically determinate substructure we divide free dof's into two groups: those dof's that
need to be retained, because they also involve other elements of the structural model to which the
substructure belongs, and those dof's that are internal to the substructure and do not involve other
elements of the structural model. We denote the first set with subscript a, i.e. faU , and the second
set with subscript b, i.e. fbU . The forces in the first set of dof's faP are not known, while those in
the second set of dof's fbP are given. The force-deformation relation of the substructure
expresses the relation between the forces and corresponding displacements at the set of free dof's
with subscript a. From the earlier flexibility relation we can write for the set of dof's with
subscript a
fa aa fa ab fb fa0= + +U F P F P U
We can transform this relation to the force-deformation relation of the substructure by the
following correspondence
fa aa fa ab fb fa0 0= + + Æ = +U F P F P U v f q v
where fa=v U , aa=f F , and 0 ab fb fa0= +v F P U .
128 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #6 on Oct. 12, 2000
Problem (5 points)
Determine the force-deformation relation for the basic system of a beam with an abrupt change ofstiffness at midspan, as shown in the figure.
i j
L/2 L/2
EI 2EI
129 of 218

130 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #8 on Nov. 14, 2002
Problem (5 points)
Establish the flexibility matrix and the initial deformations for the force-deformation relation0= +v fq v of the element in the figure in terms of EI, L and w. Axial deformations are assumed
negligible in all members.
L
L
EI
EI
1q2q
rigid
w
131 of 218

132 of 218

Final Examination Fall Semester 2001
6. Problem (6 points)
Establish the force-deformation relation of the element in the figure in the form =v f q under the assumption that axial deformations are negligible throughout.
L L L
L
EI
EI
1q2q 3qrigid rigid
rigid
133 of 218

134 of 218

Final Examination Fall Semester 2004
4. Problem (3 points)
Determine the force-deformation relation of the element in the figure for the case that axial deformations are negligible and the semi-rigid connections at the interface between the flexible and infinitely rigid segments have rotational stiffness rk .
EI
w
2q1q
i jrigid EI
L/3 L/3 L/3
135 of 218

Symmetry
There are three possible types of symmetry in a 3d structural model: symmetry about a point,
axis or plane. In 2d these reduce to symmetry about a point or plane; both of these symmetry
types can be interpreted as symmetry cases about an axis, in the former case about the axis
normal to the plane with the point as its trace on the 2d plane of the structural model, in the latter
about the axis formed by the trace of the symmetry plane on the 2d plane of the structural model.
Any of these types of symmetry permit us to group the degrees of freedom in a symmetric and an
anti-symmetric set. Denoting the symmetric set of dof's with subscript s and the antisymmetric
with subscript a we can write the equilibrium equations in the form
fa aa fa fa0
fs ss fs fs0
00
Ê ˆ È ˘ Ê ˆ Ê ˆ= +Í ˙Á ˜ Á ˜ Á ˜Ë ¯ Ë ¯ Ë ¯Î ˚
P K U PP K U P
and we note that there is no coupling stiffness coefficients between symmetric and anti-
symmetric dof's. This permits the solution of two smaller problems for the case of general
loading. For the special case of symmetric or anti-symmetric loading, which is most common in
homework and examination problems, only one of the two smaller problems need to be solved. If
there are multiple types of symmetry, then the free dof's can decomposed further and the solution
effort can be greatly reduced.
For the smaller structural models that appear in homework and examination problems, the
preceding approach is the most convenient. For larger structural models it is expedient to
introduce suitable boundary conditions at the point, axis or plane of symmetry and analyze only
one half of the full structure. This will be explored further in the course.
136 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #7 on Nov. 7, 2002
Problem (5 points)
Set up the equilibrium equations in the form f f f0= +P K U P for the smallest possible number ofrelevant dofs for the system in the figure. All members are assumed as inextensible. In addition,members b and d are assumed as inflexible. The flexural stiffness of the other members is EI.
1
2
3 4
5
6
a
b
c
d
e
w=2 w=2
4 6 4
8
3
1
2
3 4
5
6
a
b
c
d
e
w=2 w=2
4 6 4
8
3
137 of 218

138 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #7 on Nov. 8, 2001
Problem (5 points)
Determine the relevant independent free dofs for the structural model under the given loading.For these dofs set up the structure compatibility matrix fA . Members a, b, c and e have stiffnessEI, but are inextensible. Members d and f are inflexible and inextensible.
10 10
12
10a
d
cb
f
e
1
23 4
5 6
139 of 218

140 of 218

Final Examination Fall Semester 2001
3. Problem (4 points)
Determine the vertical displacement at node 3 for the case that truss member e suffers a thermal strain of 32 10Tα∆ −= ⋅ . Axial deformations are negligible in members a through d which have flexural stiffness of EI=20,000. The axial stiffness of member e is EA=5,000.
8 8
6
1
2
3
4
5
a b c d
e
141 of 218

142 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2000 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #10 on Nov. 9, 2000
Problem (5 points)
The symmetric structure in the figure is subjected to asymmetric distributed loads. Neglect axialdeformations in all members and flexural deformations in members b and c. The flexural stiffnessof the other members is EI. Determine the diagonal terms of the structure stiffness matrix ffK forthe asymmetric generalized free dof's and the terms of the initial force vector 0fP for thedistributed loading.
10 10
12
10a
d
cb
f
e
1
2 3 4
5 6
20 20
143 of 218

144 of 218

Final Examination Fall Semester 2003
4. Problem (4 points)
The members of the structure in the figure have the following properties: elements a and b are inextensible and have flexural stiffness EI=10,000 units; elements c and d are inextensible and inflexible; finally the truss elements e and f have axial stiffness EA=4,000 units.
For the given uniformly distributed element load determine the extreme values of the bending moment and sketch the bending moment diagram.
Determine the horizontal translation at node 4.
How should elements e and f be prestressed to reduce the horizontal translation at node 4 to zero under the given distributed element load?
ab
c
d
e
f
w=5
w=5
8 8
6
6
12
3
4
5
145 of 218

146 of 218

147 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #8 on Nov. 13, 2003
Problem (5 points)
Elements a through f of the structural model in the figure are inextensible. Elements c and f are also inflexible, while the others have flexural stiffness EI. The axial stiffness of element g is EA. Determine the relevant free degrees of freedom, stiffness coefficients and initial force vector terms for the given loading.
a
b
c
d
e
f
g
w=10
w=10
8 8
2
6
2
148 of 218

149 of 218

Final Examination Fall Semester 2002
6. Problem (4 points)
For the structure in the figure axial deformations can be neglected in all members. Furthermore, members f and g are inflexible. The flexural stiffness of the other members is EI=20,000. Under the given loading the vertical translation of node 5 is 24.267 10-- ◊ (i.e. downward) and the rotation of node 5 is 32.000 10-◊ (i.e. counter clockwise). Determine the end moments of all members and draw the bending moment diagram of the entire structure.
12
3
45
6
a b
c d
ef g
8 8
6
w=10
w=10
150 of 218

151 of 218

Force Method
In the force or compatibility method the unknowns of the analysis of a statically
indeterminate structural model are NOS redundant basic forces in the equations of equilibrium.
In this regard it is expedient to recall that the equations of equilibrium involve NOS more
unknown basic element forces than available equations.
We denote the set of redundant basic forces by xQ . We write the equilibrium equations in
the form
f fi i fx x fw= + +P B Q B Q P
and note that the selection of the NOS redundant basic forces should be such that the equilibrium
matrix fiB is non-singular. fiB is the equilibrium matrix of the primary structure. We can solve
the above system of equations for iQ , i.e.
( ) ( )1i fi f fw fx x
-= - -Q B P P B Q
and after inserting xQ on both sides of the above equation in the original basic force order we
obtain
i f fw x x( )Q B P P B Q= − +
We will describe later how to set up directly the force influence matrices iB and xB by hand,
but the procedure illustrated above does essentially the same and works for a structure of any
size. In most problems we are interested in a specific load case, i.e. the force vectors fP and fwP
are given and usually contain many zero terms, so that it is expedient to evaluate directly the
product i f fw( )B P P− , which we denote by pQ . With this the above equation becomes
p x xQ Q B Q= +
The above equations allows for an insightful, physical interpretation of the force method: the
final basic element forces Q are the linear superposition of NOS+1 equilibrium states. The
basic forces pQ of the first equilibrium state, are the forces of the primary structure under the
given applied loading, with all redundant basic forces xQ equal to zero. The basic forces for the
other NOS equilibrium states are obtained by setting each redundant force in turn equal to 1,
152 of 218

while the other redundant basic forces are equal to zero. The resulting values form the column of
the force influence matrix xB that corresponds to the selected redundant. Because the resulting
stress state of the primary structure does not involve any external loading, it is known as a self-
stress state. We can, therefore, say that the final stress state of the structure Q is the linear
superposition of NOS self-stress states with an initial state pQ of the primary structure under the
applied loading.
The necessary set of equations for determining the value of the redundant basic forces xQ is
furnished by NOS compatibility equations. They state that for NOS linearly independent self-
stress states
Tx 0=B V
While it is possible to select a different set of linear independent self-stress states, it is most
convenient to use the self-stress states of the equilibrium solution in array xB , as shown in the
above relation. In summary, the force method is based on the following relations
p x x
s 0Tx
from equilibrium
Deformation-force
compatibility 0
= +
= +
=
Q Q B Q
V F Q V
B V
We substitute the first relation in the second and then into the third and obtain
T T Tx s p x s x x x 0 0B F Q B F B Q B V+ + =
The unknowns of the above linear system of equations are the values of the redundant basic
forces xQ . For brevity of notation we introduce the following definition
Txx x s x=F B F B
The solution for the redundant basic forces then becomes
( )1 T Tx xx x s p x 0Q F B F Q B V−= − +
With the redundant basic forces established we can express the final basic forces in the structural
model according to
( )1 T Tp x x p x xx x s p x 0
-= + = - +Q Q B Q Q B F B F Q B V
153 of 218

154 of 218

Final Examination Fall Semester 2001
4. Problem (6 points)
The structure in the figure has degree of static indeterminacy of NOS=2. Confirm that the supplied values for the redundant basic forces x1 18.68=Q and x2 4.809= −Q satisfy the compatibility conditions for the distributed load of 2 units. Members a, b and c have flexural stiffness EI=40,000 and negligible axial deformations. Member d has axial stiffness EA=4,000.
Determine the rotation at node 2 under the loading.
1
2 3
4
8
6
1xQ
2xQ
a
b
c
d
6
w=2
155 of 218

156 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2003 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #9 on Nov. 25, 2003
Problem (5 points)
The degree of static indeterminacy of the structure in the figure is NOS=2. The selection of basic force redundants xQ is shown in the figure on the right. Axial deformations are negligible in members a through d. The structure is subjected to a uniform load in element d. The compatibility equations for the determination of xQ are given for the general case by the equation T T T
x s p x 0 xx x xx x s x0 with= + + =B F Q B V F Q F B F B . Set up all necessary arrays for this.
8 6
w=10
6
6
a
b
c
d
e
a
b
c
d
e
1xQ
2xQ
157 of 218

158 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2002 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #9 on Nov. 21, 2002
Problem (5 points)
The degree of static indeterminacy of the structure in the figure is NOS=2. The selection of basicforce redundants is shown in the figure on the right. Axial deformations are negligible inmembers a, b and c. The structure is subjected to a uniform load in member c, as shown.Determine the basic element forces pQ under the uniform load and the influence matrix xB forthe redundant basic forces.
6 8
8
w
a
b
c
d
6 8
8
1xQ
2xQ
159 of 218

160 of 218

Final Examination Fall Semester 2002
3. Problem (8 points)
The degree of static indeterminacy of the structure in the figure is NOS=2. It has the following properties: members a through d are inextensible and have flexural stiffness EI=20,000. The axial stiffness of member e is EA=50,000. The structure carries a uniform load of 10 units in member d, while member e is prestressed with an initial compressive force of 50 units.
The basic forces of the structure are numbered as shown. 3Q and 5Q have been selected as redundant forces xQ . A computer analysis of the structure under the given loading and the initial prestress reveals that 5 39.18Q = − . Unfortunately, the value of 3Q got lost. Your job is to find the value of 3Q that satisfies the compatibility conditions of the force method and then determine the horizontal translation of node 5.
Note: If you solve the problem successfully, you deserve the title "Raider of the Lost Q ". If you are not able to find the lost Q , use a value of 70 units for 3Q which is not too far from the truth.
a b
c
d
e
1Q 2Q3Q
4Q5Q
6Q
8 4
6
6
w=10
12
3
4 5
161 of 218

162 of 218

163 of 218

164 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #8 on Nov. 15, 2001
Problem (5 points)
The degree of static indeterminacy of the structure in the figure is NOS=2. Axial deformationsare assumed negligible in members a, b and c. The structure is subjected to a uniform horizontalload in member a, as shown. The relevant element forces are also shown in the figure. 2Q and
3Q are selected as redundant basic forces xQ . Determine the basic element forces pQ under the
uniform load and the influence matrix xB for the redundant basic forces.
1Q
2Q3Q
4Q
8
6
10
5
a
b
c
165 of 218

166 of 218

Final Examination Fall Semester 2004
5. Problem (4 points)
The structure in the figure has four independent free global degrees of freedom (DOFs), if axial deformations are neglected in elements a through c. The flexural section stiffness of elements a through c is EI=20,000 units and the axial section stiffness of the truss element d is EA=50,000. A basic force vector is provided below that is supposed to satisfy equilibrium under the uniformly distributed load of 5 units in element a, but additional effects may be present in the structure. Confirm the equilibrium statement, determine all element deformations and the horizontal displacement at node 2. You may find the figures on the next page about instantaneous centers of rotation for the two translation dofs useful in your solution.
38.65538.65521.774
21.77432.69033.983
-Ê ˆÁ ˜Á ˜-Á ˜= Á ˜Á ˜Á ˜Á ˜-Ë ¯
Q
6
88
a b
c1
2
4
d
3
w=5
6
88
1Q
2Q
5Q
3Q
4Q
6Q
167 of 218

Final Examination Fall Semester 2004
6
8
a b
cdof 1
ICa
ICc
8
d
ICb
ICb
6
8
a b
c
dof 2
ICbICa
ICc
8
d
168 of 218

169 of 218

Final Examination Fall Semester 2003
5. Problem (4 points)
A former student of CE 220 in your company analyzed the structure below with the following properties: elements a through d are inextensible and have flexural stiffness EI=40,000 units; the truss element e has axial stiffness EA=10,000. Under the given vertical load of 20 units at node 3 he used the force method to obtain these values for the two redundant basic forces: x1 54.56= -Q and x2 56.71= -Q . Unfortunately, he forgot to record whether these values included the effect of prestressing in element e. Matters became serious when your boss turned up while the analyst went to see the "Return of the King" (a 3 hr, 15 min spectacle), and demanded from you the answer about the inclusion of prestressing in the calculations. Can you do it?
12
3
4a
b c
d
5
6 8 8
10
6
e
20
12
3
4a
b c
d
5
e
1xQ
2xQ
170 of 218

171 of 218

172 of 218

173 of 218

174 of 218

Incipient Collapse
The combination of several concepts from the preceding sections permit the determination of
the displacements at the free dof's of the structural model at incipient collapse. We call this way
the state of the structural model just before the collapse load factor cl is reached. This means
that the last plastic hinge is about to form, but all other plastic hinges have already formed and
have undergone plastic deformations of unknown magnitude. We denote the plastic deformation
locations with subscript p and the deformations that remain in the elastic range with subscript n.
In order to determine the displacement values of the free dof's of the structural model at
incipient collapse we use the principle of virtual forces. We select the virtual force system so that
the basic element forces dQ have zero value at all plastic deformation locations (i.e. at all
plastic hinge locations except the last one to form). Collecting the virtual basic force values
under a unit virtual force at each free global dof in a force influence array iB we can write for
the displacements at the free dof's of the structural model
Tf i=U B V
We note that the element deformations V are in general equal to e pl+V V , with the elastic
deformation given by the relation e s 0= +V F Q V . Since the basic forces Q are known at
incipient collapse, it is straightforward to determine eV . However, the total deformations are not
known as long as we do not know the plastic deformations plV . Fortunately, the virtual force
system that we have selected has zero virtual force values at all location with non-zero plV , so
that the global dof displacements are determined correctly from the expression
T
f i e=U B V
With the displacements of all free global dof's at incipient collapse determined we use the
compatibility relations to obtain the total element deformations V , i.e.
f f=V A U
which now allows us to determine the plastic deformations at incipient collapse from
175 of 218

( )pl e f f s 0= - = - +V V V A U F Q V
The determination of the plastic deformation increments plDV past the point of incipient collapse
can be obtained from the compatibility of the plastic collapse mechanism as was discussed in an
earlier section.
176 of 218

Final Examination Fall Semester 2004
3. Problem (5 points)
All members of the structure in the figure are inextensible and have flexural stiffness EI=100,000. The plastic moment capacity of all elements is 200 units, except for element b whose plastic moment capacity if 300 units.
At incipient collapse three hinges form with the last hinge appearing in element b as indicated.
1. Is this a complete or a partial collapse mechanism?
2. Sketch the plastic collapse mechanism in the figure and use it to determine the collapse load factor l for the given loading.
3. Determine the vertical translation at node 4 and the plastic deformations at incipient collapse (at incipient collapse the horizontal translation at node 3 is equal to 22.9455 10-◊ units to the right, the rotation at node 2 is 21.1545 10-- ◊ units, and the rotation at node 3 is 32.9091 10-◊ ).
4. What are the plastic deformations for a downward vertical translation of 0.2 units at node 4?
1 2
3
4
5
last plastic hinge
40
20
8 8
6
6
a
b
c
d
177 of 218

Final Examination Fall Semester 2003
3. Problem (4 points)
All members of the structure in the figure are inextensible and have flexural stiffness EI=50,000. The plastic moment capacity of horizontal members a, c and d is 140 units, while the plastic moment capacity of vertical members b and e 150 units and that of element f is 200 units.
At incipient collapse four hinges form with the last hinge appearing in element b as indicated.
1. Is this a complete or partial collapse mechanism?
2. Sketch the plastic collapse mechanism in the figure and use it to determine the collapse load factor l for the given loading.
3. Determine the horizontal translation at node 5 and the plastic rotations at incipient collapse.
4. What are the plastic rotations at a horizontal translation of 0.08 units at node 5.
5. Compare the plastic rotation of the hinge in element c under question 3 and 4 and comment.
6 6
50
50
a
b
c d
e
f 6
6
last plastic hinge
12
3
45
6
7
178 of 218

179 of 218

180 of 218

181 of 218

Final Examination Fall Semester 2002
4. Problem (6 points)
All members of the structure in the figure are inextensible and have flexural stiffness EI=50,000. The plastic moment capacities of the horizontal members (a through d) is 150 units, while the plastic moment capacity of the vertical members (e, f and g) is 180 units. The sequence of plastic hinge formation is shown in the second figure. You are asked to determine the collapse load factor l , the horizontal translation at node 7 and the plastic rotation of hinge 4 (right end of member d).
8 8
5
3
a b
c d
ef g
5020
1
23
4
5 67
8 8
5
3
a b
c d
eg
1
23
4
5
6
last plastic hinge
182 of 218

183 of 218

184 of 218

Final Examination Fall Semester 2001
5. Problem (6 points)
The plastic (ultimate) moment capacities of the members of the structure in the figure are as follows: 200 units for columns a and c, 120 units for beams b and d. The plastic axial force capacity of the brace e is 30 units. At collapse the four hinges in the bottom figure form (one is an axial hinge in the brace).
Determine the collapse load factor λ .
Determine the horizontal displacement at the point of load application at incipient collapse. The flexural stiffness of members a, b, c and d is EI = 50,000 units and axial deformations can be neglected. The axial stiffness of the brace e is EA=5,000 units.
Determine the plastic hinge rotations and the brace extension at incipient collapse, if the last hinge to form is at the top of column c, as indicated in the lower figure.
6
8 8
8a
b
c
d
1
2
3
4
5
e
50
6
8 8
8a
b
c
d
1
2
3
4
5
e
50
last plastic hinge
185 of 218

186 of 218

187 of 218

Substructures – Static condensation
188 of 218

Final Examination Fall Semester 2002
5. Problem (4 points)
What is the axial stiffness EA of truss members f and g, if the vertical translation under a unit force at node 5 is 46.504 10-◊ in the structure without them, while the same translation reduces to
42.996 10-◊ in the structure with them. Members a through d are inextensible with flexural stiffness EI=20,000, while the axial stiffness of member e is EA=10,000.
1 2 3
4
5
6
a b
c d
ef g
8 8
6
189 of 218

190 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental EngineeringFall Semester 2001 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Quiz #9 on Nov. 29, 2001
Problem (5 points)
Determine the axial force in the braces of the structure below for the given loading. Theflexibility of the portal frame in the figure on the right F with respect to the three given dofs issupplied below under the assumption that axial deformations are negligible. (supplied values aremultiples of 1/EI). The ratio of flexural to axial stiffness EI/EA is 8.
17.3077 0 1.38460 31.4386 0
1.3846 0 1.2308F
È ˘Í ˙= Í ˙Í ˙Î ˚
8 8
6
50
a
b c
dfe
1
23 4
5
301
23
191 of 218

192 of 218

Final Examination Fall Semester 2001
7. Problem (5 points)
For the cable stayed bridge under construction the following information is supplied: under a uniform load of unity the downward displacement at dofs 1 and 2 is 26.5391 10−⋅ . Under a unit load at dof 1 the displacement at 1 is 23.6783 10−⋅ and that at dof 2 is 23.4873 10−− ⋅ (upward).
60 60 60 60
80
40
21
w
Determine the necessary stiffness EA of a cable that is attached to dof 1, as shown in the following figure, so as to reduce the vertical displacement at dof 2 to 0.3 units under the following loading: a uniformly distributed load w=2 and a concentrated force of 10 units at dof 2. What is the smallest possible value of the vertical displacement at dof 2?
60 60 60 60
80
40
10
w=2
cable EA=?
193 of 218

194 of 218

Final Examination Fall Semester 2000
6. Problem (8 points)
Determine the vertical displacement at the point of application of the vertical force of 20 units for the structure in the figure. The flexural stiffness EI of the sloping members is 20,000 units and axial deformations can be neglected throughout.
20 208 8
12
6
20
A separate analysis of the portal frame in the following figure yielded the following relation between the horizontal force and moment at the upper right node and the corresponding displacements
3 5
5 5
2.340 10 9.000 109.000 10 3.643 10
− −
− −
⎡ ⎤⋅ − ⋅= ⎢ ⎥− ⋅ ⋅⎣ ⎦
F
20
12
12
195 of 218

LAST YEAR'S EXAMINATION PROBLEMS
196 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #1 on Sept. 19, 2005
Problem
For the structural model is the figure write down all non-trivial equations of equilibrium that do not involve the axial forces in frame elements a through e. Number these equations and corresponding basic forces according to the convention in the notes. What is the degree of static indeterminacy of the model?
a b
c
d
e
12 3
4
6 6
5
8f
5
6
197 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #2 on Sept. 26, 2005
Problem
Determine the collapse load factor λ for the structure in the figure under the given loading. The plastic moment capacity of the horizontal elements a, b, d and e is 100 units, while that of the vertical element c is 150 units. Their axial force capacity of these elements is very large and the effect of the axial force on the plastic moment capacity is negligible. The brace element f has axial capacity of 20 units. The location of the plastic hinges at incipient collapse is given. Is this a complete or partial collapse mechanism? Determine the other basic forces and draw the bending moment diagram at incipient collapse.
a b
c
d e
12 3
4
6 6
8f
56
40
30
198 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #3 on Oct. 3, 2005
Problem
Determine the force influence matrix xB for the shown redundant basic forces under the assumption that the axial forces in elements a through d are of no interest.
8 8
6
4
a
b
c
d
1 2
3 4
5
e
1Q
4Q
199 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #4 on Oct. 10, 2005
Problem
Under the assumption that elements a through c are inextensible and that element b is inflexible the structural model in the figure has two independent free global dofs as shown. For each independent dof locate the instantaneous centers of rotation of elements a through c and set up the compatibility matrix fA expressing the relation between the relevant element deformations and the independent free global dofs.
8 8
6
1U
2U
10a
b c
d
200 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #5 on Oct. 24, 2005
Problem
The structural model in the figure has only two independent free dofs under the assumption that all elements are inextensible and element b is, in addition inflexible. The instantaneous centers of rotation for each independent free dof displacement are supplied. Determine the equivalent nodal forces at the restrained dof's fwP for a uniform load w of 6 units in element b.
8 8
610
a b
c
1U
2U
1
2
3
4w=6
a b
c
1U1
2
3
4
a b
c2U
1
2
3
4
ICaICb
ICc
ICa
ICc
ICb
201 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #6 on Oct. 31, 2005
Problem
The structural model in the figure has four independent free dofs under the assumption that elements a through d are inextensible. Determine the stiffness coefficients 33K , 34K , 23K , 11K and 12K in terms of the flexural stiffness EI of elements a through d and the axial stiffness EA of element e. Identify the individual element contributions. Determine the initial nodal force vector
f0P for the uniform element load of 10 units in element d.
8 6
w=10
6
6
a
b
c
d
e
1U
3U4U
2U
202 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #7 on Nov. 7, 2005
Problem
The structural model in the figure has three independent free dofs under the assumption that all elements are inextensible and that element b is in addition inflexible. Determine all stiffness coefficients in terms of the flexural stiffness EI of each element making sure to identify the individual element contributions. The IC's for the translation dof's are supplied.
8 8
12
12
6
1
a
b
c
d
3 2
1
a
b
c
d
ICb
ICc
ICa
8 8
12
12
6
2
a
b
c
d
ICc
ICb
ICd
8 8
12
12
6
203 of 218

UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
CE 220 – Structural Analysis, Theory and Applications
Voluntary Quiz #8 on Nov. 14, 2005
Problem
Determine the rotation at node 1 under the given uniform distributed load of 10 units in elements a and b. Elements a and b have flexural stiffness EI=100,000 and are inextensible, while element c has axial stiffness EA=50,000. The force in element c under the given loading is 43.036 units.
a
b
8
6
1
2 3w=10
c
204 of 218

Midterm Examination #1 Fall Semester 2005
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
Name: ______________________________
CE 220 – Theory of Structures
Midterm Examination #1 on Oct. 13, 2005 (20 points)
1. Problem (2 points)
What is the degree of static indeterminacy of the structural model in the figure? To receive full credit provide the number of basic element forces (force unknowns) and the corresponding number of equilibrium equations without including trivial equations of the type m n=P Q .
What is the number of independent free global degrees of freedom (dof's), if elements a, b and c are assumed to be inextensible?
a b
c
205 of 218

Midterm Examination #1 Fall Semester 2005
2. Problem (6 points)
The structural model in the figure has only two independent free global dof's under the assumption that elements a through d are inextensible and element b is, in addition, inflexible. For a unit displacement value at each independent free global dof determine
• the instantaneous centers of rotation of elements a through d and the angle of rotation of the element chord,
• the relevant element deformations. After completing these tasks set up the compatibility matrix fA that relates the element deformations to the displacements at the independent free global dof's.
1
2
3
4
5
a
b
c
d
dof 2
dof 1
6
6
6
12 8
9
e
1
2
3
4
5
a
b
c
d
dof 2
dof 1
6
6
6
12 8
9
e
206 of 218

Midterm Examination #1 Fall Semester 2005
3. Problem (6 points)
For the structural model in the figure the element deformations at the locations of the basic forces 1 5−Q Q are provided. The deformation values under some loading are supplied in vector V .
V
4.2667
2.1333−
2.1333−
4.2667
20
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
10 3−=
Are these deformations compatible?
8
6
1Q
2Q
5Q
3Q
4Q
8
207 of 218

Midterm Examination #1 Fall Semester 2005
4. Problem (6 points)
Determine the collapse load factor of the structural model in the figure under the given loading. The plastic capacities of the elements are provided in the figure on the left (circled values). The location of the plastic hinges at incipient collapse is provided in the figure on the right. Determine the support reactions and check global equilibrium.
1 2
34
5
a
b
c
d
6
e f
8
6
6
6
8
3030
200
300
40
200
300
300
8
6
6
6
8
3030
208 of 218

Midterm Examination #2 Fall Semester 2005
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
Name: ______________________________
CE 220 – Theory of Structures
Midterm Examination #2 on Nov. 22, 2005 (20 points)
1. Problem (8 points)
Under the assumption that all elements are inextensible and that element b is, in addition, inflexible the structural model in the figure has two independent free global dof's, as shown. The instantaneous centers of rotation for each independent free dof displacement are supplied. Determine the stiffness coefficients, the applied force vector and the initial force vector for the independent free dofs. Identify the individual element contributions to the stiffness matrix by using a subscript for the flexural stiffness EI of each element.
6 8
6
w=5
a
b
c1
2
4
w=5
ICb
ICa
a
b
c1
ICbICa
ICc
b
a
c
2
209 of 218

Midterm Examination #2 Fall Semester 2005
2. Problem (6 points)
The location of the plastic hinges of the collapse mechanism of the structural model in the figure under the given loading is supplied in the following figure. Is this a complete or partial collapse mechanism?
• Determine the relation between the plastic deformation increments and the horizontal translation increment at node 6.
• Determine the collapse load factor λ for the applied forces in the figure under the assumption that the plastic flexural capacity of the horizontal elements (a, b and c) is 100 units, that of the vertical elements (d, e and f) is 120 units, and the plastic axial capacity of the brace (element g) is 20 units.
a
b
c
d
ef
1 2
3 4
5
6 725
25
2 6 6
6
6
4
8
g
210 of 218

Midterm Examination #2 Fall Semester 2005
3. Problem (6 points)
The structural model in the figure is subjected to a horizontal force of 100 units at node 4. Elements a and b are inextensible with flexural stiffness EI=50,000 units. Elements c and d have axial stiffness EA=10,000 units.
A linear elastic analysis of the structural model under the given force gives the following partial results: 1 117.53=Q and 5 24.68=Q .
• Determine the rotation at node 2.
• Determine the basic forces 2 4throughQ Q of the structural model.
1 2
3
4
5
a
b
c
d100
8
6
6
1Q
5Q2Q
3Q
4Q
211 of 218

Final Examination Fall Semester 2005
UNIVERSITY OF CALIFORNIA, BERKELEY Dept. of Civil and Environmental Engineering Fall Semester 2005 Instructor: Filip C. Filippou
Name: ______________________________
CE 220 – Structural Analysis, Theory and Applications
Final Examination on Dec. 16, 2005
TOTAL = 20 points
Points
1. Problem /4
2. Problem /5
3. Problem /4
4. Problem /4
5. Problem /3
TOTAL /20
212 of 218

Final Examination Fall Semester 2005
1. Problem (4 points)
Under the assumption that all elements of the structural model in the figure are inextensible and that element b is, in addition, inflexible, there are 3 independent free global degrees of freedom (dof's), as shown.
1. Determine the stiffness coefficients 11K , 12K , and 13K in terms of the stiffness EI of the elements, using appropriate subscripts so as to identify the contribution of each element (2).
2. Set up the initial force vector f0P for the uniform element load of w=4 units in element b (1).
3. Set up the initial force vector f0P for the case that the support at node 1 moves downward by 0.05 units (1).
6
3
4 5
9
w=4
dof 1
dof 2dof 3
a
b
c
d
1
2
3 4
5
213 of 218

Final Examination Fall Semester 2005
6
3
4 5
9
dof 1
a
b
c
d
1
2
3 4
5
6
3
4 5
9
dof 2
a
b
c
d
1
2
3 4
5
6
3
4 5
9
0.05
a
b
c
d
1
2
3 4
5
214 of 218

Final Examination Fall Semester 2005
2. Problem (5 points)
Elements a through f of the structural model in the figure are inextensible and have flexural stiffness EI=100,000 units. The axial stiffness of the brace element g is EA=50,000. The structural model is subjected to concentrated forces at nodes 3 and 5, as shown. The plastic hinge locations at incipient collapse are given (the last hinge to form is also indicated in the second figure).
1. Is this a partial or a complete collapse mechanism? (1/2 p)
2. Determine the collapse load factor λ under the condition that the plastic moment capacity of the girder elements a through d is 60 units, the plastic moment capacity of the column elements e and f is 80 units and the plastic axial capacity of the brace g is 20 units. (2 ½ p)
3. Determine the plastic deformation of the brace element g at incipient collapse and at a vertical translation of node 3 of 0.1 units (downward) (2 p)
a
b
c d
e
f
1 2
34
56
20
7
g
25
8 6
6
6
215 of 218

Final Examination Fall Semester 2005
20
25
8 6
6
6
last plastic hinge
216 of 218

Final Examination Fall Semester 2005
3. Problem (4 points)
The elements a through f of the structural model in the figure are inextensible and have flexural stiffness EI=50,000 units. The brace element g has axial stiffness EA = 50,000 units. Under an initial deformation 0 0.1=v of the brace element, the rotation at node 5 is 45.4671 10-- ◊ units.
1. Determine the moments in all elements and draw the bending moment diagram. (2 p)
2. Determine the axial force in the brace. (1 p)
3. Draw the deformed shape of the structural model. (1p)
a
b
c d
e
f
g
3 8 3
4
6
4
1
2 3
4
5
217 of 218

Final Examination Fall Semester 2005
4. Problem (4 points)
The elements a through d of the structural model in the figure are inextensible and have flexural stiffness EI=50,000 units. The brace element e has axial stiffness EA = 50,000 units. A linear elastic analysis under the shown distributed elements loads with an initial deformation in the brace results in the following results: 3 63.386= -Q , 5 31.462=Q and 6 40.705=Q .
Determine the values of the distributed element loading (they are different!) and the value of the initial brace deformation. (with the correct values for the distributed loading the value of 1Q should be around 28 units; if you are far from this value or unable to get to any value, use it with a penalty of 2 points and proceed to determine the initial deformation; in such case you should provide full confirmation of the small round-off error of the solution in every regard).
8 8
12
34
5
a
b
c
d
6
6
e
??
8 8
12
3 4
5
1Q
2Q
3Q
4Q
5Q
6Q 6
6
218 of 218

Final Examination Fall Semester 2005
5. Problem (3 points)
Elements a, b and c of the structural model in the figure are inextensible and have flexural stiffness EI. The brace element d has axial stiffness EA. Under the simultaneous action of a vertical force of 30 units at node 3 and a horizontal force of 10 units at node 4 the horizontal translation at node 4 is 21.8821 10-◊ units. If the axial stiffness of the brace is doubled, the horizontal translation at node 4 under the same loading reduces to 21.0211 10-◊ units, i.e. it is 54.26% of the value for axial stiffness EA.
Determine the values of the flexural stiffness EI and axial stiffness EA. (3p)
30
a
b c
d
4 4
6
10
EI
EI EI
EA
1
2 3
4
218 of 218