Embed Size (px)
Citation preview

Materials Science and Engineering C 31 (2011) 1209–1220
Contents lists available at ScienceDirect
Materials Science and Engineering C
j ourna l homepage: www.e lsev ie r.com/ locate /msec
Strategies and challenges for the mechanical modeling of biological andbio-inspired materials
M.S. Wu ⁎School of Mechanical and Aerospace Engineering, Nanyang Technological University 639798, Singapore
⁎ Tel.: +65 6790 5545.E-mail address: [email protected].
0928-4931/$ – see front matter © 2010 Elsevier B.V. Aldoi:10.1016/j.msec.2010.11.012
a b s t r a c t
a r t i c l e i n f oArticle history:Received 30 April 2010Received in revised form 14 November 2010Accepted 18 November 2010Available online 25 November 2010
Keywords:Bio-inspired materialsMultiscale modelMicrostructural modelInverse modeling
The mechanical modeling of biological materials has received much attention due to diverse applications inmedicine and engineering. Biological materials are often structurally hierarchical and may possess highlydesirable structure–property relations that serve as templates for bio-inspired materials. This paper reviewsthe strategies that have been employed for the mechanical modeling of biological and bio-inspired materials,and outline the outstanding challenges. The review focuses on models based on the following approaches:single-scale versus multi-scale, microstructural versus phenomenological, and continuum versus discrete.Challenges in scale-bridging, integrated microstructural representation at all hierarchies and accurateconstitutive modeling are discussed. In particular, inverse modeling and cross-property correlations areviewed as future challenges for the modeling of bio-inspired materials.
l rights reserved.
© 2010 Elsevier B.V. All rights reserved.
1. Introduction
Nature has, through the process of evolution, solved manychallenging problems for its creatures, e.g., the nacre of the abaloneshell may have a work of fracture three thousand times that of itsmineral constituents [1], the leaves of plants such as the lotus andcolrabi possess super-hydrophobic and self-cleaning surfaces withwater contact angles greater than 1500 [2], and the human synovialjoints, which are subjected to complex and harsh static and dynamicloadings, operate with an extremely low friction coefficient of theorder of 0.02 [3]. Biological materials often organize, in a hierarchicalmanner across spatial scales, relatively weak materials (e.g., biopo-lymers and minerals) into much stronger composites with multiplefunctionalities. The field of biomimetics or bio-inspiration has as itsobjective the unlocking of the secrets of the design principles ofnature and the application of these principles to the design ofsynthetic materials.
To achieve this objective, the development of models with respectto the properties of interest is highly desirable. Models of biologicalmaterials are necessary for a rational understanding of their designprinciples, which can subsequently be used to design the bio-inspiredcounterparts. Hence, modeling of the mechanical properties has beenfocused on biological materials rather than synthetic bio-inspiredmaterials. Further research is however necessary for bio-inspiredmaterials since there is much greater flexibility in the designvariables, e.g., the choice of material components, varying degrees
of constraints between the components, different boundary condi-tions, and novel geometric configurations. In this paper, the modelingstrategies and challenges in themechanical modeling of biological andbio-inspired materials are reviewed.
There exist a number of recent reviews of the structures andmechanical properties of biological materials in relation to bio-inspiration [4–6], focusing primarily on hard materials such asabalone shells, antlers, tusks, bones and sponge spicules. The con-sensus is that the optimum structure–property function in biologicalmaterials is achieved through hierarchical organization of structuresacross spatial scales, incorporating features such as multilayerconfiguration, organic/inorganic interfaces, inclusions in the form ofpores/platelets/fibers, and details such as structural waviness andcorrugation and functionally gradient material composition. Indeed,many theoretical, computational and experimental investigations ofnatural materials have been carried out since 2000. Through thesestudies, the strengthening and toughening mechanisms in nacre havebeen attributed to the interlocking of the microscale aragoniteplatelets [7] and the structural waviness of the platelets [8], amongothers. The hard, stiff and yet highly extensible cuticular coating ofbyssal threads of marine mussels has been experimentally investi-gated and it was found that deformable granules ~0.8 μm in diameterwithin the coating of the species Mytilus galloprovincialis can arrestcracks and consequently the coating can tolerate large strains of up to70% [9]. The high penetration resistance of the armor of thefreshwater fish Polypterus senegalus has been studied via nanoinden-tation, scanning electron micrograph and finite element analysis ofthe individual fish scales, which reveal a quad-layered structuralconfiguration with gradated stiffness and hardness over a micrometerlength scale [10]. Similarly, the energy absorbing ability of the

1210 M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
carapace of the turtle Terrapene carolina has been studied viamechanical tests and finite element analysis and attributed to thetri-layered structure, which consists of two exterior bone layers andan interior sandwiched layer of closed-cell foams [11].
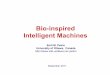
Fig. 1 plots the tensile strength (σb) versus the elongation (eb) (atbreak) data in a map for high strength metals and biological materialsat various degrees of mineralization ranging from soft to hard. Thedata are taken from [12]. In addition, the data for several recentlyfabricated bio-inspired composites, i.e., Al2O3 platelets/chitosan [13]and clay platelets/polymer [14,15], are superimposed in the figure. Itcan be seen that for the metals there is a tendency that the greater theelongation at break the smaller the tensile strength. In contrast,biological materials may retain the tensile strength for elongation ashigh as 60%, suggesting that strength and extensibility need not beexclusive. Note that these observations reflect statistical trends. Thedata scatter shows deviations from these trends, e.g., a metal with alarger elongation at break may have a higher tensile strength. The fewexamples of bio-inspired materials occupy an intermediate regionbetween metals and biological materials; in fact they may perform aswell as some metals, i.e., they have rather high strength andextensibility. This is because much stronger reinforcements can beutilized in the synthetic bio-inspired composites, in contrast to thelimited raw materials based on elements such as C, N, Ca, Si, H andO available to natural biological materials in their environment atambient temperatures. Guided by the design principles of nature,one aim of bio-inspiration in this case could be to push for thedevelopment of synthetic materials that can occupy the top rightregion in the map, yielding materials with inclusive properties of highmagnitudes. Besides strength and extensibility, the properties in alarger context may include stiffness/compliance, toughness, self-healing, low friction coefficient, etc. Deformation characteristics suchas large displacements and strain-hardening may also be of interest incertain applications, e.g., sensors and actuators.
In the view of this author, modeling of bio-inspired materialsinvolves the concepts of both forward and inverse modeling. For abiological material, the task is to simulate its properties and responsesusing internal microstructures already determined by nature. This is aforward problem. It is a challenging task, for one has to model thedifferent structures with complex geometries at multiple lengthscales, make assumptions about the relevant structures, mechanics
Fig. 1. Schematic plot of the tensile strength versus the elongation at break for selected metalbiological materials (large circles) are labeled. Note the significant extensibility of sometendency of elongation gain at the expense of strength. Data are collected from http://matweoccupy a narrow region between metals and biological materials.
and physics that are to be taken into consideration, and to integratethe structures, geometries, material properties, constitutive behaviorand loadings into a predictive scheme. It is implicitly assumed that themodel for a biological material can be used to design a bio-inspiredmaterial synthesized from different materials, provided the micro-mechanisms (such as structural hierarchy and interlocking) are thesame in both the biological and bio-inspired materials. On the otherhand, a bio-inspired design may be regarded as an inverse problem.Here the internal microstructures are not initially known and are notrestricted to a limited set, and the aim is to design these structuresthat will yield the desired properties, which may be required to besuperior to those of nature. An inverse problem is inherently difficultsince the specified performance criteria might consist of multipleproperties (high strength, high toughness, significant extensibility,etc.) and multi-physics properties (elastic stiffness, thermal conduc-tivity, etc.). It should be noted that an inverse modeling scheme alsorequires accurate forward modeling.
This paper reviews the modeling strategies and challenges in fourcategories: (1) multiscale versus single-single, (2) phenomenologicalversusmicrostructural, (3) continuumversus discrete, and (4) analyticalversus numerical. These models, shown schematically in Fig. 2, arein general not mutually exclusive; a model can be microstructural,analytical and continuum-based, for instance. For the first threecategories, specific models are presented in Sections 2 to 4. Challengesare highlighted in Section 5, and conclusions are given in Section 6.
2. Multiscale and single-scale models
Because of the inherent hierarchical nature of biological materials,a multiscale modeling strategy is often appropriate for investigatingtheir properties and behavior. From a computational viewpoint, fullyatomistic methods to solve macroscale problems are currently in-feasible. Furthermore, at each scale of interest, whether nano-, micro-,meso -or macroscale, a single-scale model is needed to capture thematerials behavior. A central problem is scale bridging, not only in thesense of passing parameters or variables calculated by differenttechniques across scales but also that of correctly capturing thephysics across widely disparate scales. The methodology of multiscalemodels for biological materials has been largely borrowed from thosedeveloped for synthetic materials.
s, biological and bio-inspiredmaterials. Data for some specific metals (small circles) andsoft biological materials with uncompromised tensile strength. For metals, there is ab.com/search/PropertySearch.aspx. The few examples of bio-inspired materials [13–15]

Fig. 2. Categorization of mechanical models for biological/bio-inspired materials.
1211M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
2.1. Single-scale models
For the single-scale models, the appropriate method of analysisdepends on the spatial and temporal scale, as illustrated in Fig. 2. Abinitio methods may be used if the size of the material domain is notmore than ~1 nm and the temporal span is not more than ~1 ns.However, the system size typically consists of no more than a fewhundred atoms and the real time span is no more than a fewpicoseconds. These are quantum mechanical methods, e.g., theHartree–Fock approach that approximates the wavefunction in theSchrödinger equation, and the density functional theory thatreformulates the problem in terms of an electron density. The classicalmolecular dynamics (MD) method is suitable when the domain sizeand time span are respectively in the range 1 to 100 nm and 1 to1000 ns. In this method, the electronic degrees of freedom areremoved via the Born–Oppenheimer approximation and the Schrö-dinger equation by the Newton's equation of motion in classicalmechanics, which governs the motion of the atomic degrees offreedom. The choice of the interatomic potential is an importantconsideration in this method. At and beyond the microscale and fortime span longer than ~1 μs, the continuum method of analysis isusually employed. The governing equations are usually differentialequations derived from physical principles such as the conservation ofmomentum. The finite element method is a popular continuummethod for the analysis of domain of complex geometry, which isdiscretized into elements and the degrees of freedom are defined atthe element nodal points. Reference [16] and the references thereingive a more detailed review of these various single-scale models.
2.2. Multiscale models
Multiscale models may be broadly classified into sequential (orhierarchical) and concurrent (or hybrid) types. In the sequentialmodel, analysis at one scale supplies input parameters or boundaryconditions for analysis at another scale. The scale bridging is oftenachieved via the matching of physical quantities such as energy andforce as determined at the two scales to be bridged, enabling theextraction of a small number of parameters from the fine scale to beused at the coarse scale, or via some volume averaging of the variablescomputed at the fine scale. A well-known example is the calibration ofthe parameters of empirical potentials in molecular dynamics usingthe results from quantum mechanics models. Another example is thecomputation of grain boundary energy in crystalline solids, in whichthe atomic details at the grain boundary are replaced by a disclinationdipole (a rotational defect) wall for which a continuum analysis canthen be performed [17].
On the other hand, a concurrent multiscale approach involvesthe partitioning of the material domain into regions described atdifferent resolutions and the simultaneous solution for the degrees offreedom characteristic of the different resolutions using differentmethods, i.e., a hybrid method [18]. At the interface or handshakingzone between the regions, a one-to-one correspondence existsbetween the different types of degrees of freedom. For instance, thestress distribution in a Si/Si3N4 nanopixel has been analyzed by usinga concurrent model in which the Si3N4 film and the Si/Si3N4 interfaceare treated atomistically via molecular dynamics whereas the Si istreated via the finite element method [19]. In the handshaking regionof the interface, there is a one-to-onematching of the atoms and finiteelement nodes.
For definiteness, three examples of sequential multiscale modelsadapted for biological materials are reviewed here. The essentialelements of the models are discussed and the type of results that canbe simulated are briefly reviewed. Challenges and further issues in themodeling are identified whenever possible. Concurrent multiscalemodels have not yet been employed for the investigation of biologicalmaterials, to the best knowledge of the author.
2.2.1. Sequential multiscale model for a tropocollagen moleculeIn Refs. [20,21], the mechanical properties of tropocollagen
molecules are investigated via a combined atomistic-mesoscopicmodel. A tropocollagen molecule consists of three polypeptide strandsarranged helically and stabilized mainly by hydrogen bonding betweenamino acid residues. These molecules form collagen fibrils, which arebundled together to form collagen fibers in a hierarchical structure [22].A tropocollagen molecule is typically 300 nm long and 1.5 nm indiameter. Note that the “mesoscopic” model is actually microscopic, asthe tropocollagen molecule is of submicrometer length.
As shown schematically in Fig. 3a, the mesoscopic model consistsof beads connected by springs, with six beads or particles replacing a84-Å-long segment of a tropocollagen molecule [20]. The beadsreduce considerably the degrees of freedomwhich must otherwise beconsidered in a fully atomistic simulation. Molecules as long as280 nm were studied using the bead-spring model. The 84-Å-longmolecular segment, embedded in water at the temperature of 300 K,is first studied via MD with complete atomic degrees of freedom. Twotypes of force fields are employed: CHARMM [23] and ReaxFF [24].The classical force field CHARMM, widely used for the simulation ofprotein molecules, takes into account covalent, van der Waals, ionicinteractions as well as hydrogen bonding. The reactive force fieldReaxFF is capable of capturing chemical reactions and mechanicalbehavior at large strain, unlike the classical field. The loadings appliedto the molecular segment include tension, compression, bending and

Fig. 3. Sequential multiscale modeling strategies: (a) coarse graining with parameterpassing from fine to coarse scale [20], (b) top-down modeling in which macroscalevariables set the boundary conditions for the microscale and computed microscalevariables are homogenized and returned to the macroscale [31], and (c) coarse grainingin which nanograin interactions are substituted by bond interactions modeledempirically [36].
1212 M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
shear. These results are used to determine the spring constants in themesoscopic model, e.g., the “stretching” stiffness and the “bending”stiffness, via matching the energies and forces calculated in the twomodels.
The atomistic results show that under tensile loading a tropocol-lagen fiber undergoes strain stiffening at around 30% strain, reflectingthe switch of elasticity controlled by the unraveling of the helicalstrands to the stretching of covalent bonds. Furthermore, stretchingthe molecule axially to large strains shows discrepancy in the resultspredicted by CHARMM and ReaxFF. Agreement is obtained only up tothe strain of ~10%, and the ReaxFF results predict fracture at ~50%strain whereas the CHARMM results do not. The fracture strength is~2.5 pN. On the other hand, the fiber buckles under a compressiveload of ~1000 pN at ~5% strain. Under three-point bending, theapplied force is approximately linearly dependent on the bendingdisplacement up to ~4 Å, at which the applied force is ~3 pN. Theflexural rigidity EI is estimated to be 9.71×10−29 Nm2, from whichthe persistence length is estimated to be 23.4 nm at 300 K. Shearing oftwo molecules suggests that the maximum shear force is rate-dependent, which decreases from ~3000 pN to 750 pN as the loadingrate decreases from 2×10−4 Å /step to 2.5×10−5 Å /step. Finally, themesoscopic results for long molecules of length 14, 28 and 280 nm,simulated with a time span of up to several microseconds, suggestthat the molecule will bend significantly when its length is larger thanthe persistence length.
Several issues may be considered in the future. First, thesimulations depend critically on the interatomic potentials. Predic-tions made by different potentials such as CHARMM, AMBER [25] andOPLS-AA [26] should be systematically compared. Further efforts in
developing such potentials to accurately model biomacromolecules atlarge deformation are of interest. The reactive potentials, for instance,have been developed for hydrocarbons, metals and semi-conductorsand their extension to biomacromolecules is relatively new [27,28].Second, scale bridging remains a key issue in any multiscale model.For instance, it is not clear if the application of continuum linearelastic beam theory results to a nanoscale fiber in order to extract themesoscale parameters will yield accurate results. The error involvedin scale bridging is unknown. Third, bridging across scales of manyorders of magnitude remains a difficult challenge. Thus far, thebridging in most models occurs across adjacent scales involving ~ twoorders of magnitude, e.g., from atomistic to microscopic. It is an openquestion how one can mechanically model the hierarchical structuresacross more than three orders of magnitude, e.g., from thetropolocollagen molecules though the collagen fibrils to the fibers.Can one repeatedly extract and pass parameters from one scale tothe next? Fourth, can one model the hierarchical structures usingconcurrent models? In solving problems using a concurrent model,such as that of a cracked silicon specimen, the region around the cracktip can be analyzed using an ab initio method and the remainingregion can be coarsely partitioned and analyzed using moleculardynamics and the finite element technique. The regions are spatiallydistinct. In a material with “compositional hierarchy,” however, theregions that require fine scale modeling are nested within those thatrequire only coarse scale modeling. If a fiber is to be modeled, then itsconstituent fibrils will need to be studied via a finer model and thetropocollagen molecules within each fibril studied via an even finermodel. This becomes very cumbersome, especially if differentcomputational techniques are to be employed at the different scaleswith the accompanying tasks of handling complex interfaces, and ifthe fibers in a bio-inspired equivalent are to have a non-uniformspatial distribution. Finally, mathematical foundations of the multi-scale model, with the associated issues of error estimation andpropagation, solution stability and convergence, are lacking. Themultiscale model may generate a voluminous data output, but in theabsence of a solid mathematical foundation its accuracy in describingphysical reality may always be questionable. Attempts have beenmade to reduce the errors in multiscale modeling via the concept ofgoal-oriented adaptive modeling [29,30].
2.2.2. Sequential multiscale model for a cortical boneIn Ref. [31], a microscale–macroscale model for investigating the
elastic properties of cortical bonewas proposed. Themicrostructure ofbone is considered to be a composite of plate-shaped nano-sizedhydroxyapatite mineral particles in collagen polymer. Hence, this isactually a nanoscale–microscale model due to the nanostructuralinclusions. The model is based on solving two boundary valueproblems, one at each scale, using the continuum finite elementmethod. At the macroscale, the domain is discretized into finiteelements. For quadrilateral elements, for example, four microscaleproblems are to be solved at the four quadrature points. The solutionprocedure follows the following steps: (1) the deformation gradienttensor in the macroscale problem is calculated and used to formulatethe boundary value problem at the microscale level, (2) themicroscale problem is solved, again using the finite element method,taking into consideration the collagen matrix, the mineral particlesand the matrix–particle interfaces, (3) the stress distribution in themicroscale is suitably homogenized (averaged), returning a stresstensor to every quadrature point in the macroscale problem, and(4) convergence criteria for the stress are checked at the macroscaleand iteration is carried out if the criteria are not met. Fig. 3b shows theschematic for this dual-scale methodology. It is emphasized that thescale-bridging is based on the homogenization technique, in whichvolume averaging theorems are applied to the microscale variables todetermine the macroscale ones. For instance, the macroscopicdeformation gradient tensor FM and the macroscopic first Piola–

1213M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
Kirchoff stress tensor PM are related to the microscopic ones Fm andPm according to:
FM =1V0
∫V0FmdV0; PM =
1V0
∫V0PmdV0; ð1Þ
where V0 is the volume of the microscopic element in the referenceconfiguration. Thus, the scale-bridging does not involve the passing ofa few parameters (such as spring constants) from one scale to another(as in many sequential models); mechanical variables are calculatedat the fine scale and passed to the coarse scale after having beensuitably homogenized.
In themicroscale problem, a representative volume element (RVE)is also used to model the microstructure consisting of the collagenmatrix, the mineral particles and the interphase regions. Each mineralparticle is assumed to be 3 nm by 75 nm and the inter-particledistance is 5 nm. The interphase region is 2 nm thick. The Young'smoduli for collagen, mineral and interphase are taken to be 0.2, 110and 7 GPa, respectively. The Young's and shear moduli as well as thePoisson's ratio for the macroscopic bone versus the mineral volumefraction are investigated. For human cortical bone, in which themineral volume fraction is taken to be 0.38, the following arepredicted: Young's moduli in the longitudinal and transversedirection=17.2 and 2.8 GPa, respectively, and the shear modu-lus=1 GPa. Furthermore, the stress distribution in the RVE iscalculated and the maximum stress concentration occurs in themiddle of the mineral plate. The maximum stress concentration alsovaries inversely with the mineral volume fraction.
The dual-scale finite element model described above has beenwidely used for synthetic and biological materials [32–35]. In Ref. [35]for instance, it has been used to compute cell deformations inengineeredmuscle tissue constructs. In principle, this approach can beextended to solve problems spanning three or more scales. However,it may become computationally costly. For a three-scale hierarchy andassuming four quadrature points for all elements, partitioning thedomain on the coarse scale intoN elementswill lead to a set of 4 N finescale subproblems. If the domain in each of these subproblems is inturn discretized into N elements, then there are 4 N2 elements at thisscale and 16 N2 quadrature points or further subproblems to be solvedat the finest of the three scales. Second, the constitutive modelemployed at each level may be more complex than the linear elasticmodel. Nonlinear and viscoelastic models may need to be employedfor soft tissues. Development of accurate constitutive models atvarious scales is thus an important task. Third, at the finer scalesatomistic methods may be more appropriate than the continuumfinite element method, depending on the specificity of the problem.Fourth, the material geometry and interfaces may be highly complexand three-dimensional and this makes finite element mesh genera-tion problematic. In Ref [31], rectangular mineral particles areconsidered and the problem is thus considerably simpler. Indeed,the main difficulty with the application of the finite element methodlies in the meshing of the complex geometry of the domain and itsmany inclusions [35].
2.2.3. Sequential multiscale model for calcified tissuesThe scale bridging in Ref. [20] is achieved through equating energy
and forces as determined in the two scales, while in Ref. [31] it isachieved through volume averaging. The two single scale models inRef. [20] are both based onmolecular dynamics, while in Ref. [31] theyare both based on continuum finite elements. In Ref. [36], a sequentialmultiscale model is proposed, in which the scale bridging is achievedthrough homogenization. The model at the fine scale consists ofnanograins which interact according to some potential functions,which are empirically-derived. Through the volume-averaging pro-cess, this yields a set of constitutive relations for the coarse scale, atwhich the domain can be modeled using finite elements. The
empirical parameters can be estimated via finite element simulationsin conjunction with experimental measurements using a variety oftechniques including scanning acoustic microscopy, atomic forcemicroscopy and nanoindentation.
Fig. 3c illustrates the concept of the nanograins interactingthrough “pseudo-bonds”, in analogy with molecular dynamics. Thepseudo-bonds connect the centroids of the nanograins. The potentialfunction can be formulated in terms of the pseudo-bond length andthe tangential distortion between two grains. From this potentialfunction, it is possible to derive force–displacement relations and thestiffness Kij (i, j=1, 2, 3) for that pseudo-bond. Volume averaging canthen be carried out for the pseudo-bonds, e.g. for the elastic stiffnesstensor at the coarse scale for a large number of nanograins:
Cijkl = L20Np∫Ωni Ωð ÞKjl Ωð Þnk Ωð Þξ Ωð ÞdΩ; ð2Þ
where L0 is the initial length of the pseudo-bond, ni, nk are thecomponents of the unit vector along the pseudo-bond, Np is the bonddensity per unit volume, ξ(Ω) is the directional density of the pseudo-bonds, andΩ the solid angle. This stiffness tensor can be implementedin a finite element investigation of a material sample, e.g., to deter-mine the stress distribution, which can be correlated to actual datafrom high resolution imaging data.
The development of microscale constitutive relations as reviewedabove is essentially particle or granular-based and has manyprecedents, e.g., [37,38]. As with any method based on potentialsdescribing the interactions of the constituent elements (atoms,particles, grains, etc.), the empirical nature of the potentials is asource of inaccuracy. Also, scale bridging and the grain-coarseningintroduce further assumptions and thus possible errors. In this case, asynergistic integration of multiscale modeling and imaging/experi-mental techniques facilitates model calibration as well as interpreta-tion of experimental data.
3. Microstructural and phenomenological models
Models can also be broadly categorized as microstructural, whichtakes into account the material structures and hierarchies, orphenomenological, defined by a number of empirical parameterswithout explicit consideration of the underlying structures. Generallyspeaking, microstructural models are based on a rational bottom-upapproach and are very appropriate for the modeling of bio-inspiredmaterials, e.g., the prediction of structure–property relations. On theother hand, phenomenological models may be very useful in theprediction of function or response as it avoids an excessive com-putational expenditure on the treatment of the underlying structures.
3.1. Microstructural models
In this section, microstructural or molecular models for alpha-helical protein filaments, biogels and soft tissues are highlighted.Analytical models are also presented and discussed.
3.1.1. Molecular model for alpha-helical proteinsAlpha-helices (AHs) stabilized by hydrogen bonds between N―H
and C O groups in successive turns of the helix are prevalent in proteinstructures. In recent works [39,40], the dependence of bond ruptureon the molecular hierarchy of the AHs in protein nanostructuressubjected to tensile load is investigated via a modification of the Bellmodel [41], which originally describes the rate of bond dissociation interms of an energy barrier, the applied force and the displacement (inthe force direction) required to break a hydrogen bond. The modifiedBell model considers the influence of structural hierarchies and maybe useful in the design of hierarchical bio-inspired materials in whichthe underlying building blocks are proteins, nanowires, nanotubes,etc.

1214 M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
Fig. 4a illustrates symbolically the hierarchical structures in acascading format. For instance, {8} represents 2 hierarchies with8 sub-elements at hierarchy 2, {2,4} represents 3 hierarchies with 2sub-elements at hierarchy 3 and 4 sub-elements at hierarchy 2,while {2,2,2} represents four hierarchies with two sub-elements athierarchies 2, 3 and 4, respectively. Hierarchy 1 consists of alpha-helices in all cases. The hierarchical Bell model states that the systembreaking force and the energy barrier of the systemwith n hierarchiesare dependent on the number of sub-elements at each hierarchy (bi)and the number of sub-elements that rupture simultaneously at thathierarchy (ki). To illustrate the structure of such relations, the systembreaking force fhn is reproduced below:
fhn =kBT
xb cosθln
vxbω0
� �+
∏ni = 1kiE
0b
xb cosθ
+kBT
xb cosθln bn
kn
� �+ ∑n
i = 2biki
� �× ln bi−1
ki−1
� �� �;
ð3Þ
where kB is the Boltzmann's constant, T is the absolute temperature, xbthe displacement in the direction of the pulling force required to breaka single hydrogen bond, θ the angle between the pulling direction andthe reaction coordinate of the breaking bond, v the pulling speed, Eb0
the energy barrier of a single hydrogen bond, and the summation andproduct are up to n hierarchies. Also, bi and ki enter the expression as abinomial coefficient, i.e., choosing ki ruptured bonds from a total of bibonds. Such expressions are calibrated against molecular dynamicssimulations to obtain values for E b
0 and xb.A key result of the simulations is the relationship between
robustness and the average strength (strength per AH) for the samenumber of sub-elements in a large number of different hierarchicalstructures. The robustness is defined as the strength of a defectivesystem divided by that for an intact system. A defective systemmay be one in which one sub-element is missing in a particularhierarchy. For 16,384 sub-elements, it is shown that most hierarchicalstructures display an inverse robustness–strength relationship (highrobustness but low strength, or the converse) as is the case for mostengineering materials, with less than 2% achieving both high strengthand robustness [40]. This suggests that proteins achieve a desirablecombination of properties though a very selective combination ofhierarchies.
Further challenges would be to develop the hierarchical model,currently based on hydrogen bond rupture only, taking into account
Fig. 4. Microstructural modeling: (a) Hierarchies of alpha-helices (redrawn from [40]),and (b) complex orientational and spatial inhomogeneities of collagen fibers inarticular cartilage (redrawn from [52]).
other structural details such as chemical reactions between othermolecules and hydrophobic effects. Another challenge would be therational understanding of why a very selective group of hierarchiesleads to a desirable combination of properties, and the identificationof the morphological traits of such successful hierarchies. This will beimportant from the viewpoint of designing bio-inspired hierarchicalmaterials. In addition, theoretical predictions should be tested againstthe performance of actual bio-inspired structures. Lastly, it is desirableto investigate if, and how, successful hierarchies can be constructedfor a wider range of materials (besides protein-based materials). Forinstance, can the modeling strategy be directly transplanted forsilicon-based or metal-based hierarchical materials?
3.1.2. Molecular model for biopolymersMany soft biological materials consisting of solvent-filled protein
networks undergo strain stiffening when stretched, as shown foractin, fibrin, vimentin, keratin, neurofilaments and collagen [42–44].The stiffening is generally advantageous as it limits the strain of softtissues. A molecular model [44] shows that this stiffening is quitegeneral for an open cross-linked mesh of protein filaments with norequirements for particular architectures. The model predicts thevariation of the shear modulus with shear strain. The basis of themodel is the force-extension relation for a single filament. This rela-tion accounts for both entropic elasticity at low strains and enthalpicelasticity at large strains. For the latter, a stretch modulus is incor-porated into the force-extension relation. For filaments distributedwith a probability distribution P(r), where r denotes the separation,the stress tensor of the isotropic homogeneous network can becalculated by averaging the force per unit area exerted by a single linkover all magnitudes and directions of r, i.e.:
σ ij =ρ
detΛf Λrj jð Þ
Λilrlð Þ Λjkrk� �Λrj j
* +; ð4Þ
where ρ is the number density of links, Λ is the Cauchy deforma-tion tensor, and b . N denotes the averaging operator over P(r). It wasfound that the model predictions can be matched against experimen-tal data for the shear modulus of fibrin filaments at various massdensities.
A central issue in microstructural modeling of biogels is thestructural representation of the salient features, e.g., the principalconstituents (matrix, fibers, inclusions, fluid), the material anisotropyas well as inhomogeneity. Biopolymers contain a significant amountof solvent, and models have been developed to account for the dualcomponents of a protein matrix and interstitial fluid. Many micro-structural models also treat the fibers as the primary constituents.These models, which do not describe the microstructures at themolecular level, are reviewed in the next sub-section.
3.1.3. Microstructural models for soft tissuesSoft biological tissues such as articular cartilage often contain a
collagen-proteoglycan matrix with interstitial fluid. A biphasic theorywas developed in which the matrix is modeled as an incompressible,porous, permeable solid and the interstitial fluid as incompressible[45]. The fundamental field equations consist of a continuity equationfor the phases, momentum equations for each phase, constitutiveequations for each phase, and an equation for the drag force account-ing for the solid-fluid interaction. The theorywas further developed toaccount for three phases [46] and multiple phases [47]. For instance,an incompressible solid, an incompressible fluid and a monovalentionic phase were considered in Ref. [46]. Finite deformations wereconsidered in Ref. [48]. Finite element studies based on the biphasictheory were also attempted [49,50]. A more recent study took intoaccount the osmotic pressure and the tension-compression nonline-arity of the cartilage in the modeling of its frictional response [51].

1215M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
These models are microstructural in the sense that the constituentphases are explicitly considered. Furthermore, the fiber structures inthe tissues may be given primary consideration in the microstructuralmodeling as reviewed below.
For articular cartilage, there is an inhomogeneity associated withdepth from the articular surface to the bone-cartilage interface: thecollagen fibers are roughly parallel to the surface in the top superficialzone, random in orientation in the middle zone, and perpendicular tothe bone-cartilage interface in the deep zone, as shown in Fig. 4b [52].In addition, the aspect ratio of the cells in these three zones also variesfrom ellipsoidal withmajor semiaxis parallel to the articular surface inthe superficial zone, through spheroidal in the middle zone, toellipsoidal with major semiaxis perpendicular to the bone-cartilageinterface in the deep zone. The material can be described astransversely isotropic and transversely homogeneous, meaning thatthe material properties vary with the direction perpendicular to theplanes of transverse isotropy.
Transversely isotropic and transversely homogeneous modelshave been developed for linear elasticity [53] and permeability [54].However, nonlinear elasticity is more appropriate for the modeling ofsoft tissues, and this presents a significant challenge if nonlinearitytogether with fiber anisotropy and depth-dependent inhomogeneityare to be taken into account. The challenge of modeling a statisticaldistribution of fibers is explained in Ref. [52] and reviewed in thefollowing. Suppose that the energy densityW(C), where C is the rightCauchy–Green deformation tensor, can be written as the sum of avolumetric part U(J) and a distortional part W C
� �, where J=det F (F
is the deformation gradient) and C = J−2=3C is the modified Cauchy–Green deformation tensor. Furthermore, the distortional part can beexpressed as the sum of an isotropic component ϕ0W0 C
� �represent-
ing the matrix contribution and an anisotropic part ϕfW f C;A� �
representing the fiber contribution. Here ϕ0 and ϕf denote the matrixand fiber volume fractions, respectively, while A = M⊗M is astructure tensor characterizing the family of fibers with theorientation M. For a statistical distribution of fibers with probabilitydensity ψ Mð Þ, the anisotropic part can be written as an integral over aunit sphere:
∫ψ Mð ÞϕfW f C;A� �
dS: ð5Þ
In general, it is difficult to evaluate the above integral analytically,except when W f C;A
� �is an affine function of A, i.e.:
W f C;A� �
= a Q C� �
: A + b C� �� �
; ð6Þ
where a is a parameter, and Q and b are tensor and scalar functions ofC, respectively. If Eq. (6) holds, Eq. (5) reduces to an explicit analyticalform with no integral:
∫ψ Mð ÞϕfW f C;A� �
dS→ϕfW f C; A� �
; ð7Þ
where
A = ∫ψ Mð Þ M⊗Mð ÞdS ð8Þ
is a directional average of A. It is further shown in Ref. [52] that if thecontribution of fibers in compression is to be suppressed via theintroduction of a Heaviside function in W f C;A
� �of Eq. (5), it is not
possible to reduce that equation into the form of Eq. (7), regardless ofthe form of W f C;A
� �. For cases in which Eq. (5) cannot be evaluated
analytically, a numerical method of evaluation will be necessary butthis adds computational cost to the solution.
A specific case of closed-form analytical solutions for the stress in atissue with vonMises distribution of fibers and an exponential form ofthe fiber stress has been obtained [55]. The π-periodic von Mises
distribution f can be written in terms of two parameters κ (con-centration factor) and μ (preferred direction):
f θ; κ ; μð Þ = 1πI0 κð Þ exp κ cos 2 θ−μð Þ½ �f g; ð9Þ
where I0 is the modified Bessel function of the first kind of order 0 andθ is the orientation. Also, the constitutive law for a fiber takes thesecond Piola–Kirchoff stress Sf as:
Sf = A exp B λ2f −1
� �h i−1
n o; ð10Þ
where A and B are constitutive constants and λf is the stretch for afiber aligned with θ. The expression for λf , which depends on thesquared principal stretches C1 and C2, θ and α, the angle cor-responding to the direction of the first eigenvector of the Greendeformation tensor, is given in Ref. [55]. The stress is the sum of allfiber stresses and is given by:
Sij = ∫π
0ei θð Þej θð ÞSf θ;C1;C2;αð Þf θ; κ ; μð Þdθ; ð11Þ
where ei(θ) and ej(θ) are the components of the unit vector along thefiber direction θ. Closed-form expressions can be obtained for Sij, giventhe assumed forms of Eqs. (9) and (10). For instance,
S11 =k0 I0 γð Þ + I1 γð Þcos2δð Þ
I0 κð Þ −A2
1 +I1 κð ÞI0 κð Þ cos 2μ
� �; ð12Þ
where k0, γ and δ are parameters dependent on A, B; C1, C2, α; κ, μ; andI1 is the modified Bessel function of the first order. Similar expressionscan be obtained for S22 and S12. Incorporation of such closed-formsolutions to a finite element scheme for solving the problem ofuniaxial extension of an obliquely aligned sample has resulted in aspeedup of the computational time by 200 times as compared todirect numerical integration of Eq. (11). This emphasizes the ad-vantage of using analytical solutions in solving large scale problems.
The brief review of the equations in this section draws attention tothe challenges that are encountered when a statistical distribution ofcollagen fibers is present in articular cartilage, and thus similar if notgreater challenges when multiple structural elements contributing toanisotropy and inhomogeneity are to be incorporated in the model.For instance, the depth-dependent inhomogeneity will introduce anadditional complexity into the model formulation. The treatment ofthe interaction between multiple structures of different types, e.g.,fibers and cellular inclusions, is also a challenging topic.
3.2. Phenomenological models
Accounting for the various microstructural elements complicatesthe model formulation and makes finite element solutions of largeproblems with complex geometry and boundary conditions costly.Hence, phenomenological models may play a useful and practical rolein solving large scale, realistic problems. Indeed, their use in modelingbiological materials has a long history [56,57]. In this section, severalphenomenological models are reviewed.
3.2.1. Phenomenological models for soft tissuesSoft tissues are often elastically nonlinear and time-dependent in
their mechanical response. Nonlinear elastic constitutive modelsassuming isotropy are based on the strain energy function W such as[58]:
W = ∑Ni + j = 1Cij J1−3ð Þi J2−3ð Þj ð13Þ
where J1 and J2 are the invariants of the left Cauchy–Green straintensor, and Cij arematerial constants. The first two terms involving the

1216 M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
constants C01 and C10 form the Mooney–Rivlin model developed forincompressible rubbers. Time dependence can be built into Eq. (13)by re-defining Cij as an exponential series and Eq. (13) can berewritten in the form of a convolution integral:
W = ∫t
0∑N
i + j = 1Cij t−τð Þ ddτ
J1−3ð Þi J2−3ð Þjh i�
dτ; ð14Þ
where t denotes the time. Stresses are obtained by differentiatingEq. (14) with respect to the stretches. For the modeling of swine braintissue and comparison to experimental data, Eq. (14) has been usedwith N=2, involving the five time-dependent parameters C01, C10,C11, C02 and C20. The results show that the model can describe well thecompressive stress-strain behavior of swine brain tissue up to thestrain of 30-40% over five orders of loading rates. The response isstrongly rate-dependent and also demonstrates a strain stiffeningbehavior beyond ~10% strain.
The importance of accurate modeling of the nonlinear elasticbehavior of individual components in soft biological issues isdiscussed in Ref. [59]. In this work, two constitutive models for theelastinous constituents of an artery are compared with experimentaldata: the Neo-Hookean with the exponent n=1 and its modificationwith n=3/2 [60]:
W = c I1−3ð Þn; ð15Þ
where c is a constant and I1 is the first invariant of the right Cauchy–Green tensor. Comparing the model predictions for the case ofuniaxial extension of an elastinous sheet and for the extension andinflation of a cylindrical elastinous tube to experimental data, it isconcluded that both models have limitations and that furtherdevelopment of the models is necessary, citing such applications asmodeling the effect of elastin degradation on carotid wall mechanics[61] and arterial remodeling in response to hypertension [62].
A further example shows that the development and application ofphenomenological models to modeling the mechanical functions ofbiological materials remains an active field of research. Recently, ananatomically accurate three-dimensional model for the humangastroesophageal junction [63] was implemented in a finite elementscheme using the following constitutive equation of the exponentialtype:
W =C2
eQ−1� �
; ð16Þ
where
Q = 2c1 E11 + E22 + E33ð Þ + c2E211 + c3 E222 + E233 + E223
� �+ 2c4 E 2
12 + E213
� �;
ð17Þ
Eij are the Lagragian strains, and c1 to c4 are constants. The modelresults show that the pressure inside the junction is consistent withexperimental measurements, and help to identify the role played bythe different muscle layers of the junction. The key issue inphenomenological modeling consists of developing the functionalform appropriate for a given material or composite and the deter-mination of the material constants.
3.2.2. Phenomenological models for biogelsPhenomenological models may suffer from the disadvantage that
their parameters need to be calibrated against actual experimentaldata, which are not available for materials under development.Microstructural models circumvent this problem because theirparameters are based on the assumed microstructures. On the otherhand, phenomenological models are more amenable to the analysis oflarge domains than microstructural models. Analytical solutions in
phenomenological models may also be obtained for simple loadingand geometry. Recently, a phenomenological model for the nonlinearelasticity of gels (biogels and hydrogels) was suggested [64], in whichthe parameters can be connected to those of a microstructural model.In this approach, the energy density in the nonlinear elastic model iscompared to that of a microstructurally-basedmodel [65], in the samespirit as the scale bridging of a fine scale model to a coarse scalemodel. In the microstructurally-based model of [65], the key variablesare the principal stretches λ1, λ2 and λ3 and the water concentration C(number of water molecules divided by volume of dry polymernetwork) in the gel. Its free energy densityW is written as the sum of amechanical and chemical part:
W =NkT2
I21−2I2−3−2 log I3� �
+kTv
vC logvC
1 + vC− χ
1 + vC
� �;
ð18Þ
where N is the number of polymer chains in the gel divided by thevolume of the dry polymer and kT is the thermal energy, I1, I2 and I3are the invariants of the stretch tensor, v the volume of a solventmolecule, vC the ratio of the volume of solvent to that of dry polymer,and χ a dimensionless parameter. In the phenomenological model[64], the strain energy density for second-order nonlinear elasticity is:
W = αJ1 +λ + 2μ
2J21−2μJ2 +
l + 2m3
J31−2mJ1 J2 + nJ3; ð19Þ
where J1, J2 and J3 are the three invariants of the Lagrangian straintensor and λ, μ, l, m and n are the elastic constants (α is a parameterrelated to the initial hydrostatic stress state). Expressing I1, I2 and I3 interms of J1, J2 and J3 approximately (up to the third order in theproduct of the strains), and noting that the ratio of the volume of thegel to the volume of the dry polymer is 1+vC= I3 (product of thethree principal stretches), one can equate Eqs. (18) and (19) in orderto pass the microstructural parameters to the elastic parameters. Inparticular, this means that λ, μ, l,m and n can be expressed in terms ofmicrostructural parameters, i.e.:
λ = − A2 + 2A5ð ÞNkT; μ = 1 +A2
2
� �NkT ;
l = − A4 + 3A6ð ÞNkT; m = −2 +A4
2
� �NkT; n = − 4 + A2ð ÞNkT ;
ð20Þ
where the A's are dependent on vC0 (initial value of vC ), vN, χ and theinitial values of the principal stretches λi=λ0, i=1, 2, 3.
In principle, the second-order nonlinear elastic model can be usedto capture the essential elements of another model, be it micro-structural, phenomenological, etc., provided the free energy of thatothermodel is available analytically for comparisonwith Eq. (19). Onemay also use a phenomenological model based on Eq. (19) to obtainanalytical solutions for simple problems such as those involvingtorsion and axial stretching, and can investigate how the propertiesand deformation are dependent on changes in the microstructuralparameters. This will be useful for tailoring the design of bio-inspiredmaterials with optimal properties. Indeed, it has been shown [64] viaparameter study that a biogel may stiffen under uniaxial tension,experience a negative normal stress under simple shear, and contractlongitudinally under torsion (inverse Poynting effect). Experimentalevidence exists for the axial stiffening [44] and negative normal stress[66] in biogels. The predicted inverse Poynting effect has yet to beverified experimentally. Furthermore, the problem of spherical gelssubjected to spherically symmetric dilatation has also been solvedanalytically [67]. Such solutions may lead to an understanding of themechanical strength and deformation of gel-based actuators anddrug-delivery matrices.

1217M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
3.2.3. Phenomenological models for self-healing materialsStructural materials are susceptible to damage in the form of
cracks. Self-healing, as inspired by biological systems, has beendeveloped for such materials. Self-healing polymer composites, forinstance, can heal via an external heat, mechanical or chemicalstimulus, or by healing agents stored in the polymer matrix andreleased through interaction between cracks and the storage vessels[68]. The mechanical behavior of self-healing materials can be des-cribed via phenomenological models.
In Ref. [69], a constitutive model is developed on the basis athermodynamic framework, which describes the damage and healingprocesses by a set of internal variables such as damage (d), plasticity(p) and healing (h). These variables, which are in general tensorial incharacter, may be denoted by ϕd, ϕp and ϕh. The thermodynamic stateis determined by the Helmholtz free energy ψ:
ψ = ψ εe;ϕd;ϕp;ϕh
� �; ð21Þ
where εe denote the elastic strains. The thermodynamic forces arethen obtained by differentiating the free energy:
σ = ρ∂ψ∂εe
; Vd = −ρ∂ψ∂ϕd
; Vp = −ρ∂ψ∂ϕp
; Vh = ρ∂ψ∂ϕh
; ð22Þ
which yield the constitutive equations (ρ is the mass density). Theforces Vd, etc. are said to be conjugate to the corresponding variablesϕd, etc. Variation of the internal variables is described by the evolutionlaws, which can be proposed on the basis of physical or experimentalconsiderations.
Such an internal variable approach is phenomenological as theinternal variables do not directly represent the actual structural ormaterial characteristics. The model is also mesoscopic as the damageand healing variables are described at that level. It can be used tosimulate the response of damaged self-healing materials, but cannotbe directly used to design their internal structures such as thedistribution of the healing agent vessels.
4. Continuum and particle models
Generally speaking, continuummodels are used for themacroscopicscale and down to the microscopic scale, whereas particle models (e.g.,atoms, nanograins) for the submicroscopic scale and the nanoscale. Inthemodelingofmacroscopic domains, thefinite elementmethod (FEM)is a very powerful tool. However, the computational effort may beoverwhelming due to complex geometry, material properties andboundary conditions. The task of meshing a domain using geometricaldata from imaging techniques may be very time consuming andrequires sophisticated software [70]. Three-dimensional geometry,complicated material interfaces, boundary conditions, nonlinear mate-rial properties and large deformation all add to the computational cost
Fig. 5. A schematic of the material point method (MPM), simplified from [68]: (a) four matquantities carried by the material points, (b) projection of the physical variables onto the grand (c) projection of the updated nodal variables back onto the material points.
and the solution accuracy may be dubious. The method may also besusceptible to issues suchasmeshentanglement in thepresence of largelocal stresses and strains, and hourglassing [71]. On the other hand,meshlessmethods, e.g., [72], may circumvent these difficulties since thedomain geometry is characterized by a collection of particles rather thancontiguous elements. In the following, the Material Point Method(MPM), which is a meshless method used in computational solid andfluid mechanics, is described.
The MPM was first described in Ref. [73]. Essentially, the materialdomain is represented by a collection of particles existing within astructured background grid. The particles occupy positions within thecells of the grid, and carry full information on the physical state of thematerial, including position, mass, velocity, temperature, stress, etc.The grid plays the role of a computational framework on which theequations of motion are solved. Fig. 5 shows a schematic of the MPM,simplified from [70]. In Fig. 5a, four particles are locatedwithin a cell ofthe grid, with the arrows denoting the material state (e.g., velocityvector) carried by the particles. Thematerial state is projected onto thenodes of the grid (Fig. 5b) via shape functions and the equations ofmotion are solved, yielding updated nodal quantities, which areinterpolated back to the material particles (Fig. 5c). Constitutiveequations are needed for calculating stresses. Subsequently, the com-putational grid may be reset to its original configuration or allowed tomove with the material points. Iterations are performed until someconvergence criteria are satisfied. Refer to [70] for details. As anexample application of theMPM, a vascularized construct consisting ofmicrovessels in a collagen gelwas cultured for ten days and image datawere obtained using a confocal laser scanning microscope. The datawere used to construct ~13 million particles in ~427,000 grid cells forthe microvessels and the gel. In addition, an uncoupled Neo-Hookeanhyperelastic constitutive model was used to describe both materialconstituents. The material domain was stretched in uniaxial tensionand itwas found via theMPMsimulations that the stress distribution ishighly inhomogeneous with much higher stresses in the microvesselsthan in the surrounding collagen. Other issues such as effect of gridresolution were also investigated.
The merits and limitations of FEM and MPM have been discussed inRef. [70]. Here, a possible issue with MPM is noted, i.e., whether themodeling of an interface by distinctly different types of a limited numberof material particles across it can adequately capture its characteristics.Theremaybe amaterial gradientnear the interface, and it is not clearhowthe information on the different types of interface conditions (sliding,displacement-continuous, traction-continuous, etc.) can be transmittedto and carried by the material particles adjacent to the interface. Severalworks have dealt with explicit internal cracks [74] and soft tissue failure[75] using MPM. Further research is necessary along this line toinvestigate the issue of complex interfaces within the material domain.
It appears that theMPM, aided by imaging technologies that includeMRI and ultrasound, and incorporating suitable phenomenologicalmodels for the material constituents, may be very effective for the
erial points in a background computational grid, where the arrows represent physicalid nodes, and calculations are performed on the grid with update of the nodal variables,

Fig. 6. Concepts in the inverse modeling of structure–property-function relations,where the objective is to predict structures from a targeted set of functions orproperties. The solutions of the inverse model may be non-unique (as indicated by themultiple arrows) or non-existent.
1218 M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
mechanical modeling of biological materials of large domain. For thetheoretical design of bio-inspired materials with an aim towards atargeted combination of properties, an efficient computational meth-odology is necessary since it requires large scale parameter studies to becarried out repetitively with reduced cost, increased efficiency andsufficient accuracy. Furthermore, the possible integration of the“material particles” on the continuum scale and the atomic particleson the nanoscale in a particle-within-particle or nested multiscalemodeling framework has not been investigated and presents aninteresting research topic.
5. Challenges in the modeling of bio-inspired materials
Computational methods such as the finite element method andmolecular dynamics have been used for the analysis, design andfabrication of bio-inspired materials [6,76]. In Ref. [6], finite elementanalysis was used to design a platelet-reinforced composite inspired bynacre. In Ref. [76], a Ni-Al nanocomposite, inspired by bone, wasdesigned for maximum flow stress using an embedded atom methodpotential. However, most of the models reviewed in the precedingsections have been used to investigate biological rather than bio-inspiredmaterials. Thequestion arises as towhethermechanicalmodelsfor biological materials can be used for bio-inspired materials. One mayconsider this issue from the perspectives of materials, geometries andboundary conditions. From the viewpoint ofmaterials and geometries, itis noted that many of the models for biological materials are in factborrowed from models for synthetic materials. For instance, manymultiscale models and phenomenological models that make use ofstrain energy functions were developed for synthetic materials andsubsequently extended to biological materials. If the behavior ofbiological materials with certain composition and hierarchy can becaptured by these models developed for synthetic materials, then it islikely that themodels are applicable for synthetic bio-inspiredmaterialsas well. The differences in materials may be accounted for by thedifferentmaterial constants. On the other hand, attention should bepaidtowards the differences in boundary conditions (loading and environ-ment) to which the biological materials and bio-inspired materials aresubjected. The material architectures in biological materials may bedesigned by nature for a limited range of conditions in which thebiological organisms thrive. Thus, bio-inspiration can be limited forcertain applications and mechanical modeling of bio-inspired materialsshould encompass a greater range ofmaterials and boundary conditions.
Generally speaking, biological materials do not necessarily offerthe best solutions for the design of synthetic materials, whichmay usematerial constituents, structural geometries and architectural hierar-chies different from those of biological materials, and combinations ofproperties or functions not originally present in the biologicalmaterials may be specified for the particular synthetic materials tobe developed. The models for bio-inspired materials should predictthe details of their internal structures in order that certain propertiesor functions of biological materials can be emulated, ameliorated,modified or combined. This involves inverse modeling, which isshown in Fig. 6 schematically. This can be contrasted with classical orforward modeling, which predicts properties and behavior fromknown microstructures. Inverse models have received virtually noattention in the bio-inspiration community, and this is not encour-aged by the fact that they are often difficult to solve. In Sections 5.1and 5.2 below, the challenges of developing forward and inversemodels are summarized.
A further challenging issue is the consideration of cross-propertyrelations, i.e., how different physical properties such as elasticstiffness and thermal or electrical conductivity of a material with agiven microstructure can be correlated. This is also a challengingproblem in materials science. For bio-inspired materials, knowledgeof cross-property correlations may be useful for the design optimi-zation of the microstructure. This issue is discussed in Section 5.3.
5.1. Forward models
From the review in Sections 2–4, three aspects in the forwardmodeling of bio-inspired materials may be identified as challenges:(1) microstructural modeling, (2) constitutive modeling, and (3)computational modeling.
In developing microstructural models, several challenging issuesare noteworthy. First, it is necessary to identify the relevant micro-structures at different scales and the mechanisms by which theyoperate to yield the properties and functions at the scale of interest.Microstructural characteristics such as the organizing hierarchies, thematerial constituents, inhomogeneity, composition gradient, anisot-ropy, and defects can be investigated by various techniques such asscanning acoustic microscopy, atomic force microscopy, magneticresonance imaging and digital image correlation [36,77]. However,these characteristics may have been taken into account only partiallyduring modeling and may be treated with assumptions which cannotbe easily verified. Likewise, it is often a complex task to determine anddifferentiate the operative mechanisms. Consider for instance themany investigations on the mechanical properties of nacre. Variousmodels have identified features such as platelet waviness, plateletsliding, platelet layer offset, nanoscale asperities and mineral bridges,breakage of sacrificial bonds in the protein-based glues, etc. as con-tributing in various degrees to the mechanical properties [6–8,78,79].It is not apparent which combination of these features synergisticallycontribute to the mechanical properties. A second challenging issue isto determine if and how structural features interact across scales andhow the interactions can be properly modeled. For instance, it is notclear how the combined nanoscale and microscale roughness featuresin the lotus leaf lead to superhydrophobic and self-cleaning pro-perties, although models have been used to explain the contributionof microscale roughness [2,80]. Third, it is an overwhelming task, butperhaps a necessary one, to develop an integrated microstructuralmodel that takes into account the majority of the structural featuresand operative mechanisms, since microstructural modeling plays anessential and direct role in the design of the microstructures of bio-inspired materials. This remains a critical modeling and computa-tional challenge, as computational costs multiply with the consider-ation of multiple structural features and operative mechanisms.
Constitutive modeling is also a key consideration as it plays afundamental role in the description of a material. In the moleculardynamics model, the potentials characterize the interactions amongatoms of a given material and accurate potentials are needed forcomplex biological materials. Classical force fields such as AMBER andCHARMM and reactive force fields such as ReaxFF have been used tostudy the dynamics of proteins, lipids and nucleic acids [81]. A recentreview also highlights the various computational techniques availablefor the study of biomineralization [82]. Similarly, empirical potentialsfor interacting nanograins need to be calibrated against imagingdata at the microscopic or macroscopic scale. In the coarse scale,

1219M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
constitutive laws for bio-inspired materials may need to be developedfrom microstructural models as these materials are yet to befabricated and are not available for calibration. Even if the materialconstituents of a bio-inspired material are well-known with testedconstitutive relations, the constitutive models for the overallcomposites may be difficult to validate. Hence, a possible approachis to develop phenomenological models containing a limited numberof parameters that can be extracted from microstructural models andsubsequently used for large scale simulations [64].
Many issues exist in the computational modeling of a macroscopicdomain, e.g., complex geometry, boundary conditions, and materialand geometric nonlinearity, leading to problems of convergence,efficiency, accuracy and cost. The relative merits of the finite elementmethod and meshless methods such as the material point methoddeserve further investigation for numerical solutions to problems ofbiological materials. For multiscale modeling, a central issue is scalebridging, particularly bridging over several orders of scale wheredifferent techniques may be employed as solution methods. Bridgingover one to three orders of magnitude has been achieved, e.g. from 10to 100 nm of a tropocollagen molecule [20,21]. The research onbridging over large spatial scale remains a challenge. For hierarchicalmultiscale model, the loss of accuracy in parameter passing acrossscales should be investigated.Whether parameter passing can capturethe interaction of microstructures at the different scales is also anopen issue. Concurrent multiscale models, on the other hand, are lessoften used, particularly for biological materials. The compositionalhierarchy does not seem to lend itself easily to concurrent treatmentof material points (using one technique in the coarse scale) and agreater number of nested points down in the hierarchical scale (usinga higher resolution technique). Furthermore, there is continuousdevelopment and refinement of multiscale modeling strategies, suchas the heterogeneous multiscale method, which uses a top-downstrategy based on a macroscopic solver supplemented by a micro-scopic model [83]. Application of new multiscale modeling strategiesto the solution of biomechanical problems opens up many researchopportunities. Finally, there remains a lack of investigation of themathematical foundation of the multiscale method. Such issues asconvergence, stability and error estimates have received rathersporadic attention, although this is a common modeling issue for allsorts of materials.
5.2. Inverse models
Inverse problems arise when the causes are to be determined fromthe observed data, e.g., computed tomography and inverse scattering.Symbolically, it may be represented by:
d = Gm; ð21Þ
where d and m denote the observed data and the model parameters,respectively, and G is the forward operator describing the relationshipbetween the data and model. It is intended to solve form, given d andG. Note that G may not be available in an explicit analytical form. Forthe classical or forward problem, it is intended to solve for d, given Gand m.
All the models reviewed thus far are forward models, whichpredict properties and functions based on known structures. For themodeling of bio-inspired materials, one may consider the inverseproblem: what structures (materials, geometry and architectures)should be used if certain targeted combination of properties orfunctions are to be developed? Here, one is inspired by the originalbiological designs but need not follow their templates precisely. Thus,d would now represent the targeted functions and/or properties, andm the structures or structural parameters to be solved for, given theforward operator G, which may represent any of the forward modelsdescribed in the previous sections. Inverse problems are generally ill-
posed and G may be linear or nonlinear [84]. In the following aninverse problem in elasticity imaging is reviewed.
Elasticity imaging may be used to detect tumors, which affect thestiffness properties of the soft tissues. In Ref. [85,86], several inverseproblems in nonlinear elasticity are formulated and solved, e.g., thespatial distribution of the shear modulus μ in a square plate of a Neo-Hookean material under plane strain is reconstructed from knowndisplacements. The plate contains a central inclusion with μ four timesthat of the matrix. Noise is added to the displacements solved from theforward problem. The other elastic parameter λ is assumed to beconstant and homogeneous throughout the plate. The inverse problemis reformulated as aminimization problem and solved using a gradient-based optimization method. The optimization algorithm involves thesolution of forward problems. The results show that good accuracy inthe reconstructed μ can be obtained, and the accuracy decreases withthe noise level. In this example, the inverse problem is one in which amaterial property (spatial distribution of μ) is to be predicted from aknown function (displacement field). This may be compared to thedetermination of the required spatial distribution of the materialproperties of a biogel actuator with pre-specified displacements. In thepresent context of a bio-inspiredmaterial, the inverse problem involvesthe determination of its microstructures from pre-specified combina-tion of targeted properties or functions. This is a complex task as thesolution involves the repeated use of forward models which arethemselves subjected to various modeling and computational issues.Furthermore, the solution of an inverse problem may not be unique;intuitively there could be several internal microstructures that haveapproximately the same mechanical behavior. This non-uniquenessmakes inverse modeling interesting as it offers choices for the designer.Which design solution is eventually adopted in practice will depend onother considerations such as ease of processing/fabrication, and cost.Thus, the development of inverse models for the design of bio-inspiredmaterials opens up a new and challenging topic for future research, andmay yield results with significant impact in the field of bio-inspiration.
5.3. Cross-property correlations
Quantitative assessment of cross-property correlations appears inthe 1960s. The classic work of Bristow [87] relates the effectiveelasticity and conductivity parameters for an isotropic solid containingrandomly oriented penny-shaped cracks of various radii. For instance,the Young's modulus E is related to the conductivity k according to [87]:
E0−EE
=25
1−ν20
� �10−3ν0ð Þ
2−ν0
k0−kk
; ð22Þ
where ν is the Poisson's ratio and the subscript ‘0’ denotes theproperty in the absence of the cracks. Such relations have beenobtained on the assumption of no interaction among the microcracks,and remain applicable if the interaction affects both properties in asimilar manner. Later works consider anisotropic composites anduniversal bounds on the properties. A comprehensive review of cross-property correlations can be found in Refs. [88,89].
The cross-property relations are useful since one property, whichmay be difficult tomeasure, can be estimated viameasurements of theother property. Non-destructive measurements of electrical conduc-tivities of a damaged composite, for instance, may yield a reasonablygood estimate of the deterioration of its elastic properties. For thedesign of new materials, such correlations are also useful, especiallyif the design criteria target multiple properties. For bio-inspiredmaterials, several challenges are apparent. First, the microstructure isstructurally complex while most explicit cross-property correlationsare currently available for limited structural features such as cracksand fibers. Second, it is also materially complex, e.g., soft-hardcomposite which may undergo large deformation. Investigations of

1220 M.S. Wu / Materials Science and Engineering C 31 (2011) 1209–1220
cross-property correlations have largely been confined to linearproperties and small deformations. Third, the correlations are basedon structure–property relations and their possible use in an inversemodel formulation may be explored.
6. Conclusions
This paper reviews the various strategies and challenges for themodeling of biological and bio-inspired materials. Comparisons havebeen made between multiscale and single-scale models, pheno-menological and microstructural models, and continuum and discretemodels. The role of multiscale, microstructural and phenomenologicalmodels has been emphasized from the perspectives of structuralhierarchy, material inhomogeneity and computational expediency,respectively. The challenges in these models have been discussed,particularly regarding the practical issues of scale-bridging, integratedand proper structural representation, and accurate constitutive model-ing, as well as mathematical aspects such as error propagation andsolution convergence. Further research challenges are suggested, i.e., thedevelopment of inverse models for exploring “optimized” microstruc-tures given a set of targeted properties or functions, and the explorationof cross-scale property correlations for multi-physics applications.
In the author's opinion, the various modeling approaches reviewedin this paperwill aid thedesignof bio-inspiredmaterials, as has been thecase with synthetic materials in general. Mechanical models ofbiological materials should be appropriate for bio-inspired materialsin principle. The issue is whether themodels for biologicalmaterials areproper and accurate, i.e., if the desirable properties of a biologicalmaterial can be truly explained by the mechanical model of its under-lying mechanisms. If the model characterizes the biological materialwell, then it can be used to design its bio-inspired counterpart. If it doesnot, then the erroneous or inaccurate model will likely lead to a mis-leading result in the simulation of bio-inspired materials. The inversemodeling design will likewise fail since forward modeling is an integralpart of it. Thus, forward modeling plays a pivotal role in the design ofbio-inspired materials while inverse modeling will aid the design of an“optimal” material with possibly enhanced and extended capabilities.
References
[1] A.P. Jackson, J.F.V. Vincent, R.M. Turner, Proc. R. Soc. Lond. B 234 (1988) 415.[2] Y.T. Cheng, D.E. Rodak, C.A. Wong, C.A. Hayden, Nanotechnology 17 (2006) 1359.[3] S.A.V. Swanson, in: M.A.R. Freeman (Ed.), Adult Articular Cartilage, Pitman
Medical, London, 1979, p. 415.[4] G. Mayer, Science 310 (2005) 1144.[5] P.-Y. Chen, A.Y.M. Lin, Y.-S. Lin, Y. Seki, A.G. Stokes, J. Peyras, E.A. Olevsky, M.A.
Meyers, J. McKittrick, J. Mech. Behav. Biomed. Mater. 1 (2008) 208.[6] H.D. Espinosa, J.E. Rim, F. Barthelat, M.J. Buehler, Prog. Mater. Sci. 54 (2009) 1059.[7] K.S. Katti, D.R. Katti, Mat. Sci Eng. C 26 (2006) 1317.[8] F. Barthelat, H. Tang, P.D. Zavattieri, C.-M. Li, H.D. Espinosa, J. Mech. Phys. Solids 55
(2007) 306.[9] N. Holten-Andersen, G.E. Fantner, S. Hohlbauch, J.H. Waite, F.W. Zok, Nature 6
(2007) 669.[10] B.J.F. Bruet, J. Song, M.C. Boyce, C. Ortiz, Nat. Mater. 7 (2008) 748.[11] H. Rhee, M.F. Horstemeyer, Y. Hwang, H. Lim, H. El Kadiri, W. Trim, Mater. Sci. Eng.
C 29 (1009) 2333.[12] http://www.matweb.com/search/PropertySearch.aspx.[13] Z.Y. Tang, N.A. Kotov, S. Magonov, B. Ozturk, Nat. Mat. 2 (2003) 413.[14] P. Podsiadlo, et al., Science 318 (2007) 80.[15] L.J. Bonderer, A.R. Studart, L.J. Gauckler, Science 319 (2008) 1069.[16] T.E. Karakasidis, C.A. Charitidis, Mater. Sci. Eng. C 27 (2007) 1082.[17] M.S. Wu, K. Zhou, A.A. Nazarov, Philos. Mag. 84 (2004) 785.[18] F.F. Abraham, J.Q. Broughton, N. Bernstein, E. Kaxiras, Comput Phys. 12 (1990)
538.[19] E. Lidorikis, M.E. Bachlechner, R.K. Kalia, A. Nakano, P. Vashishta, Phys. Rev. Lett.
87 (2001) 086104.[20] M.J. Buehler, J. Mater. Res. 21 (2006) 1947.[21] M.J. Buehler, S.Y. Wong, Biophys. J. 93 (2007) 37.[22] P. Fratzl, Collagen: Structure andMechanics, Springer, New York, 20088 506 pages.[23] B.R. Brooks, R.E. Bruccoleri, B.D. Olafson, D.J. States, S. Swaminathan, M. Karplus, J.
Comp. Chem. 4 (1993) 187.[24] A.C.T. van Duin, S. Dasgupta, F. Lorant, W.A. Goddard III, J. Phys. Chem. A 105
(2001) 9396.
[25] W.D. Cornell, P. Cieplak, C.I. Bayly, I.R. Gould, K.M. Merz, D.M. Ferguson, D.C.Spellmeyer, T. Fox, J.W. Caldwell, P.A. Kollman, J. Am. Chem. Soc. 117 (1995) 5179.
[26] W.L. Jorgensen, J. Tirado-Rives, J. Am. Chem. Soc. 110 (1998) 1657.[27] S.J. Stuart, A.B. Tutein, J.A. Harrison, J. Chem. Phys. 112 (2000) 6472.[28] A.C.T. van Duin, A. Strachan, S. Stewman, Q. Zhang, X. Xu, W.A. Goddard, J. Phys.
Chem. A 107 (2003) 3803.[29] J.T. Oden, K. Vemaganti, J. Comp. Phys. 164 (2000) 22.[30] J.T. Oden, S. Prudhomme, A. Romkes, P. Bauman, SIAM J. Sci. Comp. 28 (2006) 2359.[31] J. Ghanbari, R. Naghdabadi, J. Biomech. 42 (2009) 1560.[32] R.J.M. Smith, W.A.M. Brekelmans, H.E.H. Meijer, Comp. Meth. Appl. Mech. Eng. 155
(1998) 181.[33] V. Kouznetsova, W.A.M. Brekelmans, F.P.T. Baaijens, Comp. Mech. 27 (2001) 37.[34] F. Guilak, V.C. Mow, J. Biomech. 33 (2000) 1663.[35] R.G.M. Bruels, B.G. Sengers, C.W.J. Oomens, C.V.C. Bouten, F.P.T. Baaijens, J.
Biomech. Eng. 124 (2002) 198.[36] J.L. Katz, A. Misra, P. Spencer, Y. Wang, S. Bumrerraj, T. Nomura, S.J. Eppell, M.
Tabib-Azar, Mater. Sci. Eng. C 27 (2007) 450.[37] H. Gao, P. Klein, J. Mech. Phys. Solids 46 (1998) 187.[38] C.S. Chang, H. Askes, L.J. Sluys, Eng. Frac. Mech. 69 (2002) 1907.[39] T. Ackbarow, M.J. Buehler, Nanotechnology 20 (2009) 075103.[40] Q. Zhao, S. Cranford, T. Ackbarow, M.J. Buehler, Int. J. Appl. Mech. 1 (2009) 85.[41] G.I. Bell, Science 200 (1978) 618.[42] L. Ma, J. Xu, P.A. Coulombe, D. Wirtz, J. Biol. Chem. 274 (1999) 19145.[43] J. Xu, Y. Tseng, D. Wirtz, J. Biol. Chem. 275 (2000) 35586.[44] C. Storm, J.J. Pastore, F.C. Mackintosh, T.C. Lubensky, P.A. Janmey, Nature 435
(2005) 191.[45] V.C. Mow, S.C. Kuei, W.M. Lai, C.G. Armstrong, J. Biomech. Eng. 102 (1980) 73.[46] W.M. Lai, J.S. Hou, V.C. Mow, J. Biomech. Eng. 113 (1991) 245.[47] W.Y. Gu, W.M. Lai, V.C. Mow, J. Biomech. Eng. 120 (1998) 169.[48] J.M. Huyghe, J.D. Janssen, Int. J. Eng. Sci. 35 (1997) 793.[49] A.J.H. Frijns, J.M. Huyghe, J.D. Janssen, Int. J. Eng. Sci. 35 (1997) 1419.[50] W. Wilson, C.C. van Donkelaar, J.M. Huyghe, J. Biomech. Eng. 127 (2005) 158.[51] G.A. Ateshian, M.A. Soltz, R.L. Mauck, I.M. Basalo, C.T. Hung, W.M. Lai, Trans.
Porous Med. 50 (2003) 5.[52] S. Federico, W. Herzog, J. Biomech. 41 (2008) 3309.[53] S. Federico, A. Grillo, G. La Rosa, G. Giaquinta, W. Herzog, J. Biomech. 38 (2005)
2008.[54] S. Federico, W. Herzog, Biomechan. Model. Mechanobiol. 7 (2008) 367.[55] R. Raghupathy, V.H. Barocas, J. Biomech. 42 (2009) 1424.[56] Y.C. Fung, Biomechanics: Mechanical Properties of Living Tissues, Second Edition,
Springer, New York, 19938 568 pages.[57] G.W. Schmid-Schönbein, S.L.-Y. Woo, B.W. Zweifach (Eds.), Frontiers in
Biomechanics, Springer, New York, 19868, 395 pages.[58] K. Miller, K. Chinzei, J. Biomech. 30 (1997) 1115.[59] P.N. Watton, Y. Ventikos, G.A. Holzapfel, J. Biomech. 42 (2009) 1320.[60] M.A. Zullinger, P. Fridez, K. Hayashi, N. Stergiopulos, J. Biomech. 37 (2004) 989.[61] E. Fonck, G. Prod'hom, S. Roy, L. Augsburger, D.A. Rüfenacht, N. Stergiopulos, Am. J.
Physiol. Heart Circ. Physiol. 292 (2007) H2754.[62] A. Tsamis, N. Stergiopulos, Am. J. Physiol. Heart Circ. Physiol. 293 (2007) H3130.[63] R. Yassi, L.K. Cheng, V. Rajagopal, M.P. Nash, J.A.Windsor, A.J. Pullan, J. Biomech. 42
(2009) 1604.[64] M.S. Wu, H.O.K. Kirchner, J. Mech. Phys. Solids 58 (2010) 300.[65] W. Hong, X. Zhao, J. Zhou, Z. Suo, J. Mech. Phys. Solids 56 (2008) 1779.[66] P.A. Janmey, M.E. McCormick, S. Rammensee, J.L. Leight, P.C. Georges, F.C.
Mackintosh, Nat. Mater. 6 (2007) 48.[67] M.S. Wu, H.O.K. Kirchner, Second-order elastic solutions for spherical gels
subjected to spherically symmetric dilatation, submitted for publication.[68] E.N. Brown, S.R. White, N.R. Sottos, J. Mater. Sci. 39 (2004) 1703.[69] E.J. Barbero, Int. J. Damage Mech. 14 (2005) 51.[70] J.E. Guilkey, J.B. Hoying, J.A. Weiss, J. Biomech. 39 (2006) 2074.[71] M. Doblare, E. Cueto, B. Calvo, M.A. Martinez, J.M. Garcia, J. Cegonino, Comput.
Meth. Appl. Mech. Eng. 194 (2005) 801.[72] T. Belytschko, Y. Krongauz, D. Organ, M. Fleming, P. Krysl, Comput. Meth. Appl.
Mech. Eng. 139 (1996) 3.[73] D. Sulsky, Z. Chen, H.L. Schreyer, Comput. Meth. Appl. Mech. Eng. 118 (1994) 179.[74] J.A. Nairn, Comput. Model. Eng. Sci. 4 (2003) 649.[75] I. Ionescu, J.E. Guilkey, M. Berzins, R.M. Kirby, J.A. Weiss, J. Biomech. Eng. 128
(2006) 917.[76] N.C. Broeding, A. Hartmaier,M.J. Buehler, J. Gao, J.Mech. Phys. Solids 56 (2008) 1086.[77] K. Moerman, C.A. Holt, S.L. Evans, C.K. Simms, J. Biomech. 42 (2009) 1150.[78] G.E. Fantner, E. Oroudjev, G. Schitter, L.S. Golde, P. Thurner, M.M. Finch, P. Turner,
T. Gutsmann, D.E. Morse, H. Hansma, P.K. Hansma, Biophys. J. 90 (2006) 1411.[79] C. Ortiz, M.C. Boyce, Science 319 (2008) 1053.[80] J.P. Youngblood, N.R. Sottos, MRS Belletin 33 (2008) 732.[81] A. Korkut, W.A. Hendrickson, Proc. Natl Acad. Sci. USA 106 (2009) 15667.[82] J.H. Harding, D.M. Duffy, M.L. Sushko, P.M. Rodger, D. Quigley, J.A. Elliot, Chem.
Rev. 108 (2008) 4823.[83] W.E., B. Engquist, X. Li, W. Ren, E. Vanden-Eijnden, Commun. Comput. Phys. 2
(2007) 367.[84] R.C. Aster, B. Borchers, C.H. Thurber, Parameter Estimation and Inverse Problems,
Academic Press, Burlington, MA, 20058 320 pages.[85] A.A. Oberai, N.H. Gokhale, G.R. Feijóo, Inverse Prob. 19 (2003) 297.[86] N.H. Gokhale, P.E. Barbone, A.A. Oberai, Inverse Prob. 24 (2008) 045010.[87] J.R. Bristow, Br. J. Appl. Phys. 11 (1960) 81.[88] I. Sevostianov, J. Kovácik, F. Semancík, Mater. Sci. Eng. A 420 (2006) 87.[89] I. Sevostianov, M. Kachanov, Adv. Appl. Mech. 42 (2008) 69.