Embed Size (px)
Citation preview
R&DE (Engineers), DRDO
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
Strain Analysis
R&DE (Engineers), DRDO
Summary
Deformation gradient
Green-Lagrange strain
Almansi strain
Rotation vector
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
2
Rotation vector
Strain transformation
Principal strains
Strain decomposition
Strain compatibility
R&DE (Engineers), DRDO
Introduction
The effect of forces applied to a body – Newton’s second law – Stress analysis
Applied forces => deformations Concerned with study of deformations – geometric
problem – no material properties
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
3
problem – no material properties Strains => kinematics of material deformation Change in relative position of any two points in a
continuous body => deformed or strained Distance remains constant – rigid body motion
Rigid body => Translations & Rotations Continuum mechanics approach
R&DE (Engineers), DRDO
Introduction
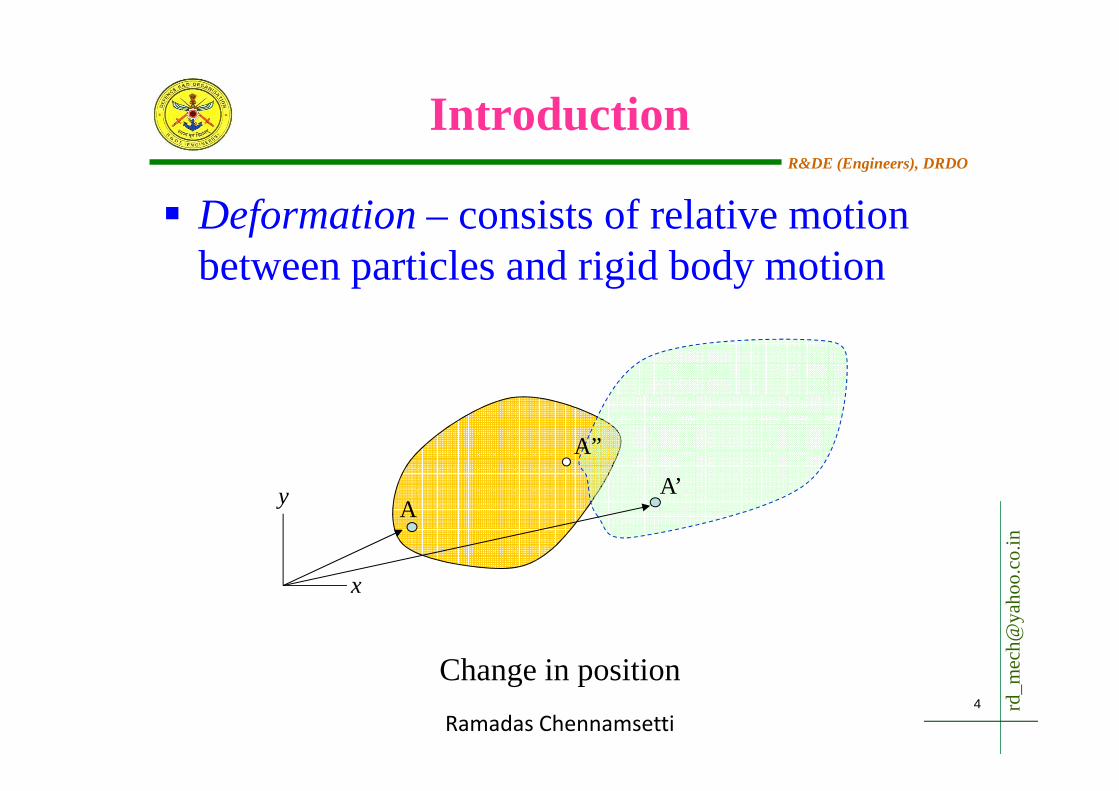
Deformation – consists of relative motion between particles and rigid body motion
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
4
AA’
x
y
A”
Change in position
R&DE (Engineers), DRDO
Introduction
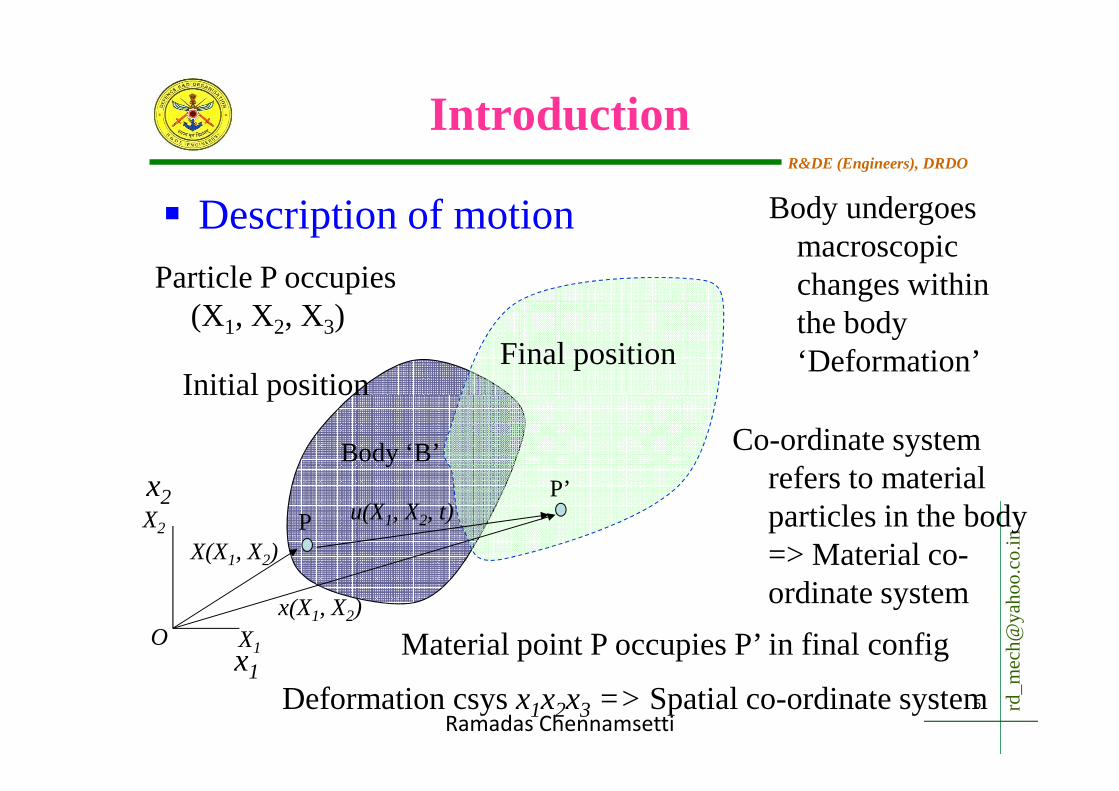
Description of motion Body undergoes macroscopic changes within the body ‘Deformation’
Initial positionFinal position
Particle P occupies (X1, X2, X3)
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
5
PP’
X1
x(X1, X2)
X2
O
X(X1, X2)
u(X1, X2, t)
x1
x2
Body ‘B’
Initial position
Co-ordinate system refers to material particles in the body => Material co-ordinate system
Material point P occupies P’ in final config
Deformation csys x1x2x3 => Spatial co-ordinate system
R&DE (Engineers), DRDO
Displacement
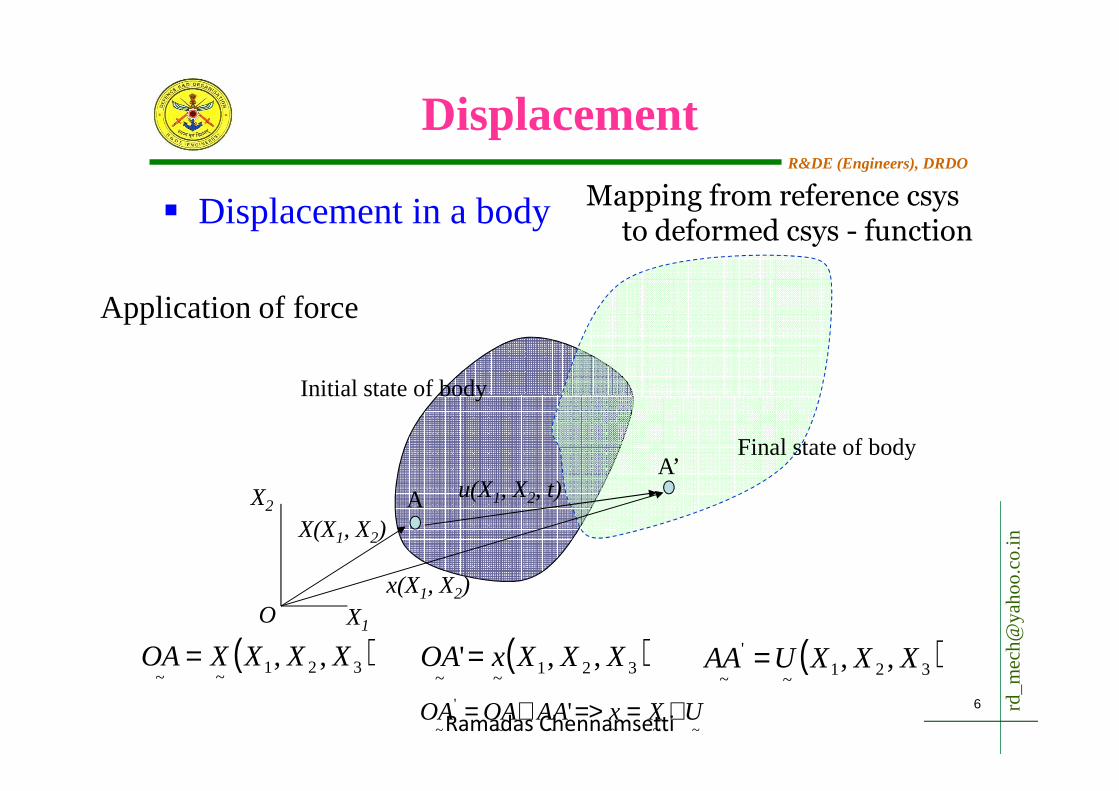
Displacement in a body
Application of force
Initial state of body
Mapping from reference csys to deformed csys - function
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
6
( )321~~
,, XXXXOA=
AA’
X1
x(X1, X2)
X2
O
X(X1, X2)
u(X1, X2, t)
( )321~~
,,' XXXxOA = ( )321~~
' ,, XXXUAA =
~~~~~~
' ' UXxAAOAOA +==>+=
Initial state of body
Final state of body
R&DE (Engineers), DRDO
Mapping
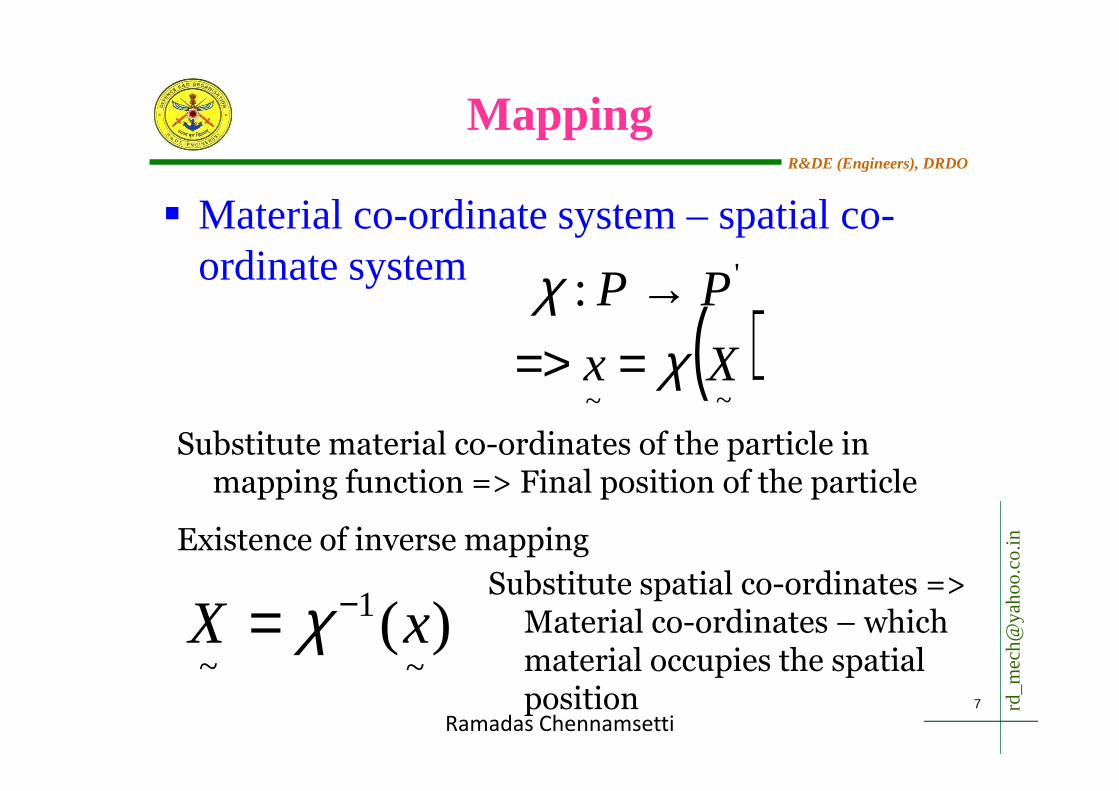
Material co-ordinate system – spatial co-ordinate system
( )~~
':
Xx
PP
χχ
==>→
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
7
( )~~
Substitute material co-ordinates of the particle in mapping function => Final position of the particle
Existence of inverse mapping
)(~
1
~xX −= χ
Substitute spatial co-ordinates => Material co-ordinates – which material occupies the spatial position
R&DE (Engineers), DRDO
Mapping
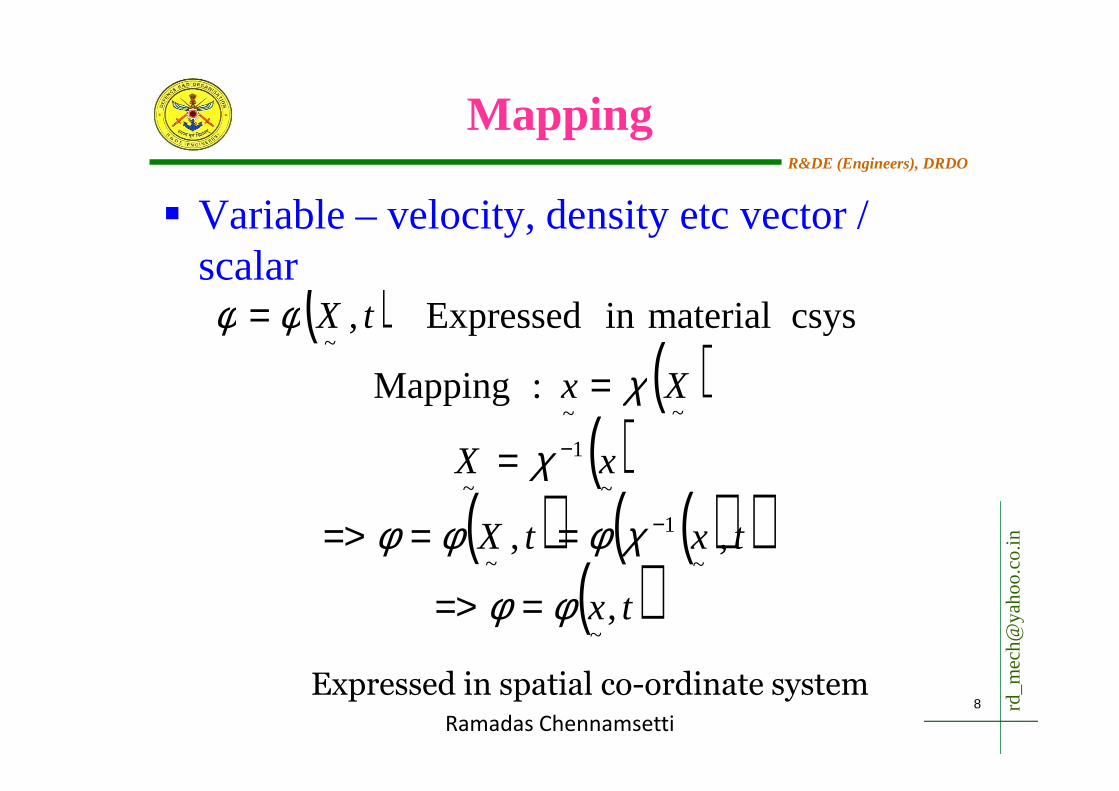
Variable – velocity, density etc vector / scalar( )
( )( )
Xx
tX
:Mapping
csys materialin Expressed ,~
χ
φφ
=
=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
8
( )( )
( ) ( )( )( )tx
txtX
xX
Xx
,
,,
:Mapping
~
~
1
~
~
1
~
~~
φφ
χφφφ
χ
χ
==>
===>
=
=
−
−
Expressed in spatial co-ordinate system
R&DE (Engineers), DRDO
Displacement
In indices notation
This relates the current deformed geometry with initial undeformed geometry of a point
( )321~~~
,, XXXuXxUXx iii +==>+=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
9
initial undeformed geometry of a point
Displacement field => movement of each point in initial configuration to final configuration
U => rigid body motion and deformation in the body
Deformation – important
R&DE (Engineers), DRDO
Normal strain
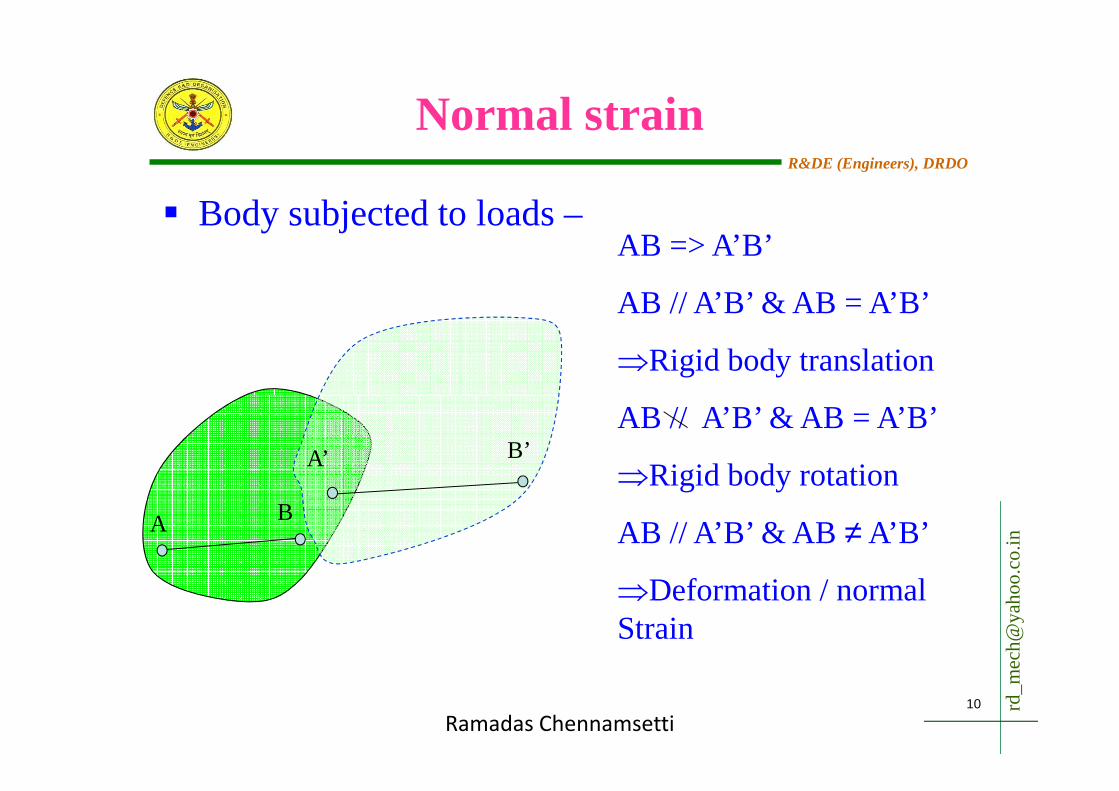
Body subjected to loads –AB => A’B’
AB // A’B’ & AB = A’B’
⇒Rigid body translation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
10
A B
A’ B’AB // A’B’ & AB = A’B’
⇒Rigid body rotation
AB // A’B’ & AB ≠ A’B’
⇒Deformation / normal Strain
R&DE (Engineers), DRDO
Shear strain
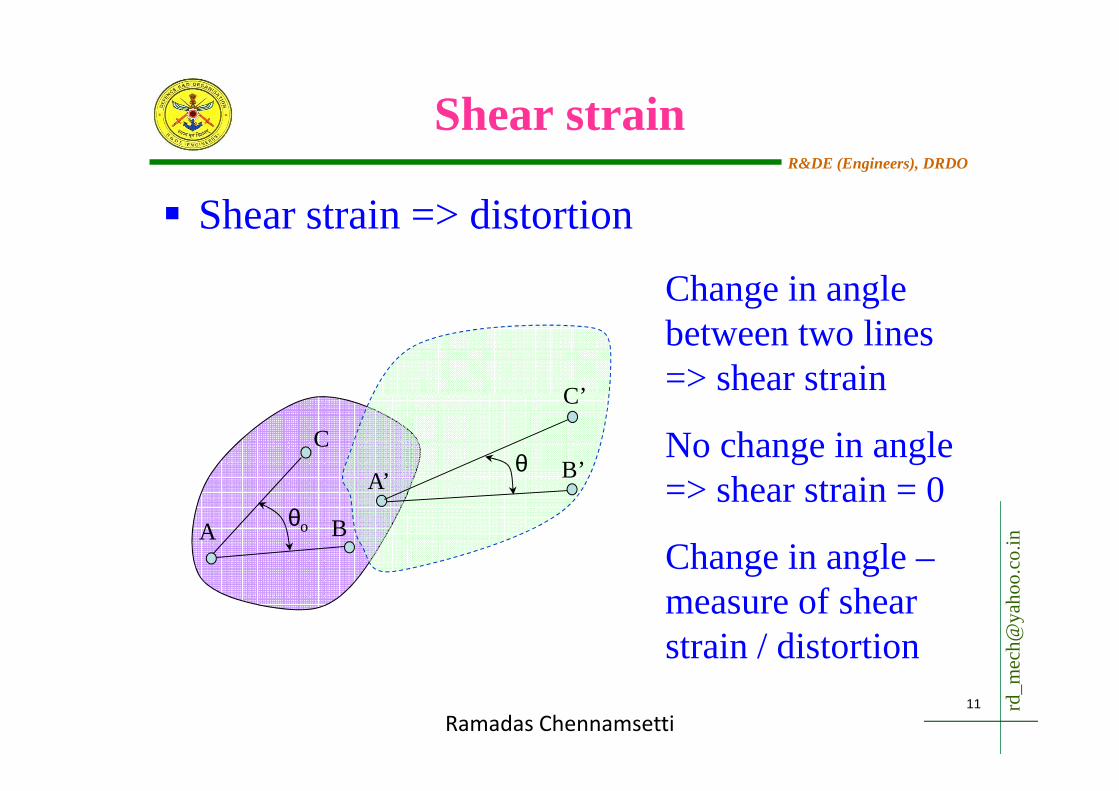
Shear strain => distortion
C’
Change in angle between two lines => shear strain
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
11
A B
A’ B’C
C’
θo
θ
=> shear strain
No change in angle => shear strain = 0
Change in angle –measure of shear strain / distortion
R&DE (Engineers), DRDO
Displacement
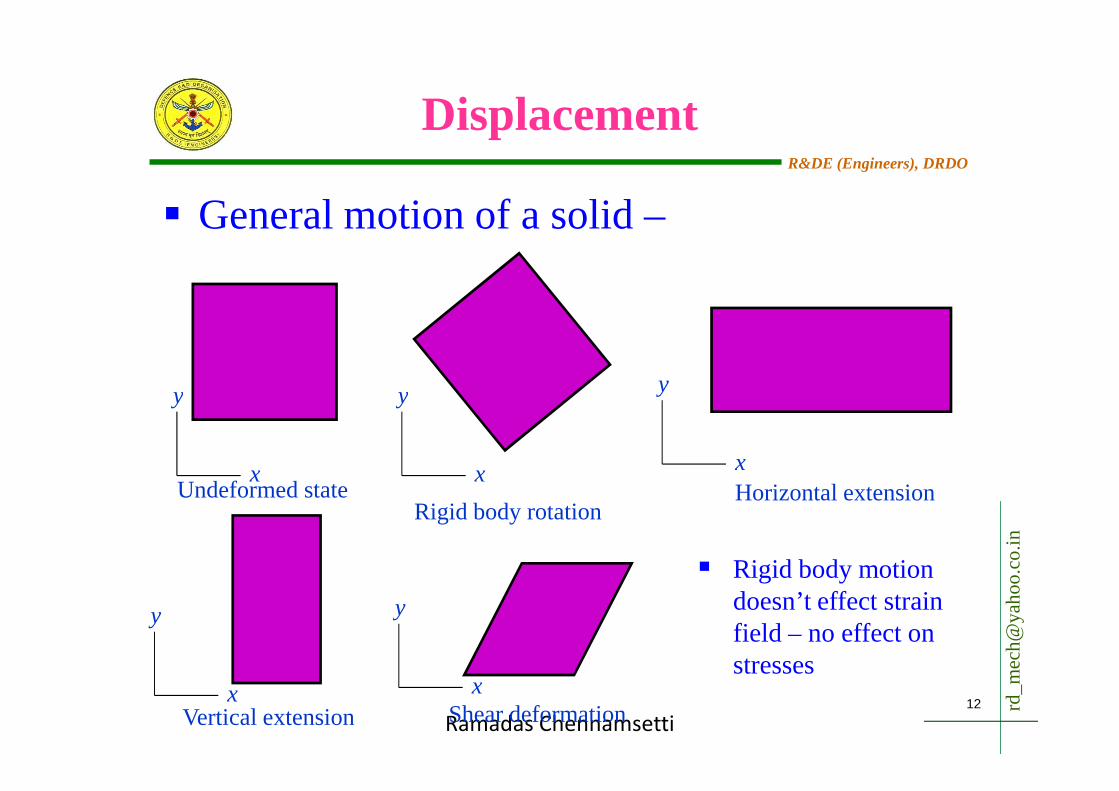
General motion of a solid –
y yy
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
12x
y
Undeformed statex
y
Rigid body rotation
x
y
Horizontal extensionx
y
Vertical extensionx
y
Shear deformation
Rigid body motion doesn’t effect strain field – no effect on stresses
R&DE (Engineers), DRDO
Strain
Strain – measure of displacement of a body
Various measures of strain - definition of strain is not unique – equally valid definition of strain
Engineering normal strain – change in length/original length
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
13
length/original length
Green-Lagrange strain
( ) ( )( )2
22
~~ length initial
length initiallength final −=E
R&DE (Engineers), DRDO
Green – Lagrange strain
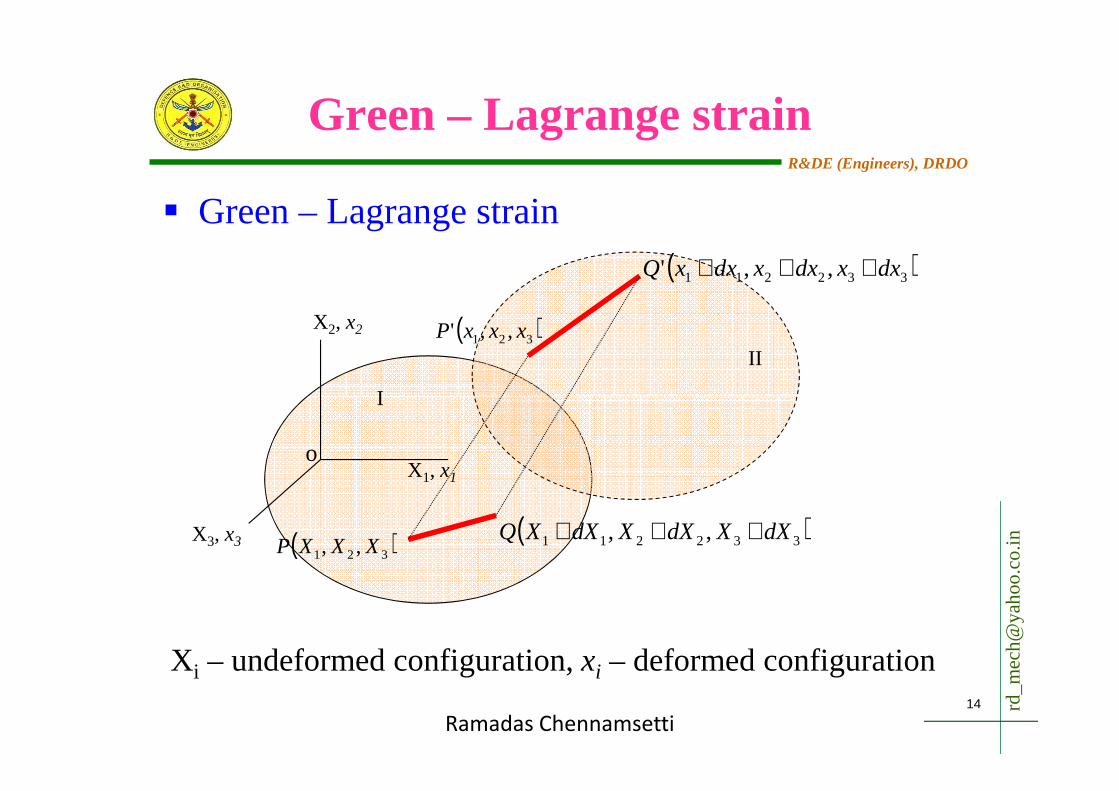
Green – Lagrange strain
X2, x2 ( )321 ,,' xxxP
( )332211 ,,' dxxdxxdxxQ +++
I
II
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
14
( )321 ,, XXXP
X1, x1
X3, x3 ( )332211 ,, dXXdXXdXXQ +++
o
I
X i – undeformed configuration, xi – deformed configuration
R&DE (Engineers), DRDO
Green – Lagrange strain
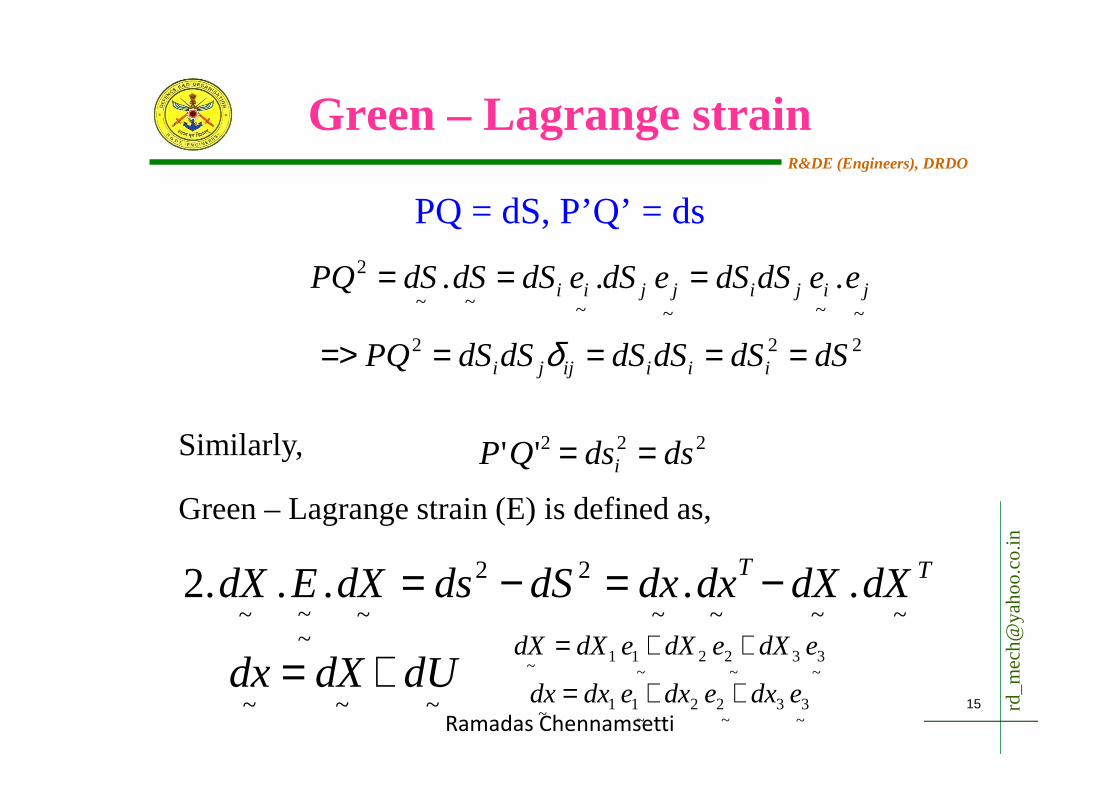
PQ = dS, P’Q’ = ds
222
~~~~~~
2 ...
dSdSdSdSdSdSPQ
eedSdSedSedSdSdSPQ
iiiijji
jijijjii
=====>
===
δ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
15
Similarly, 222'' dsdsQP i ==
Green – Lagrange strain (E) is defined as,
~~~~
22
~~~~
.....2 TT dXdXdxdxdSdsdXEdX −=−=
~~~dUdXdx += ~
33~
22~
11~
edXedXedXdX ++=
~33
~22
~11
~edxedxedxdx ++=
R&DE (Engineers), DRDO
Green – Lagrange strain
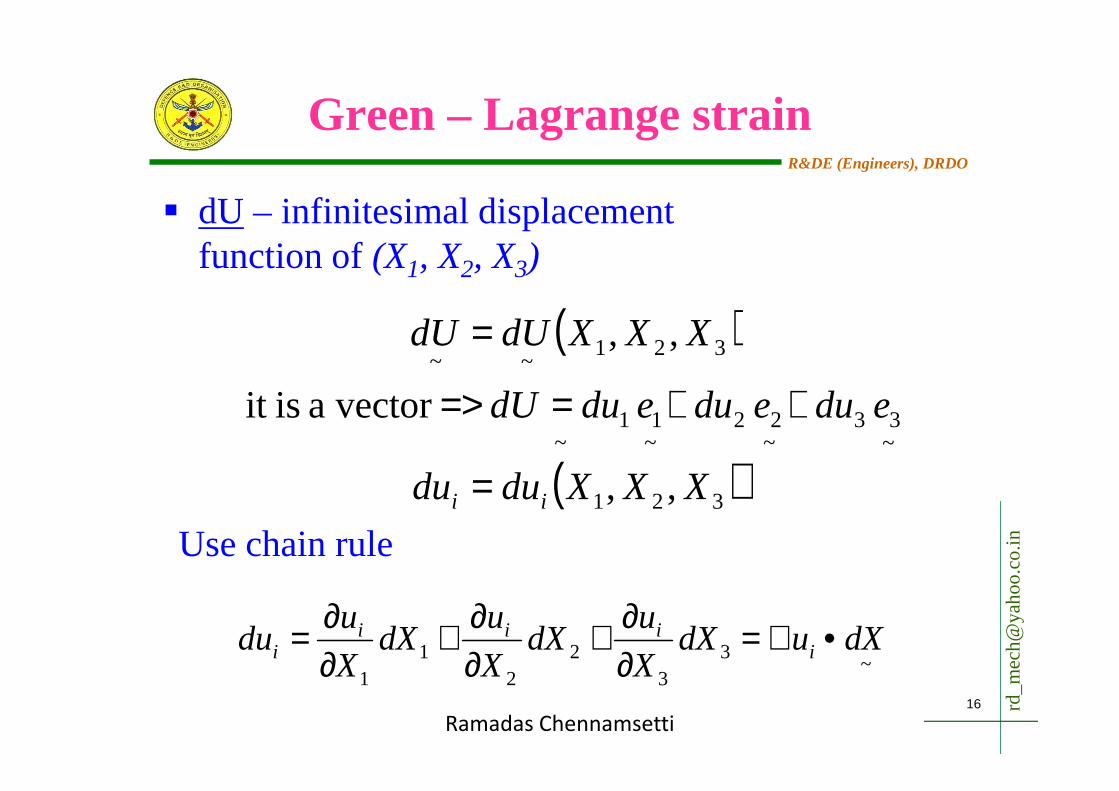
dU – infinitesimal displacement function of (X1, X2, X3)
( )321~~
vector a isit
,,
edueduedudU
XXXdUdU
++==>
=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
16
( )321
~33
~22
~1
~1
,,
vector a isit
XXXdudu
edueduedudU
ii =
++==>
Use chain rule
~3
32
21
1
dXudXX
udX
X
udX
X
udu i
iiii •∇=
∂∂+
∂∂+
∂∂=
R&DE (Engineers), DRDO
Green – Lagrange strain
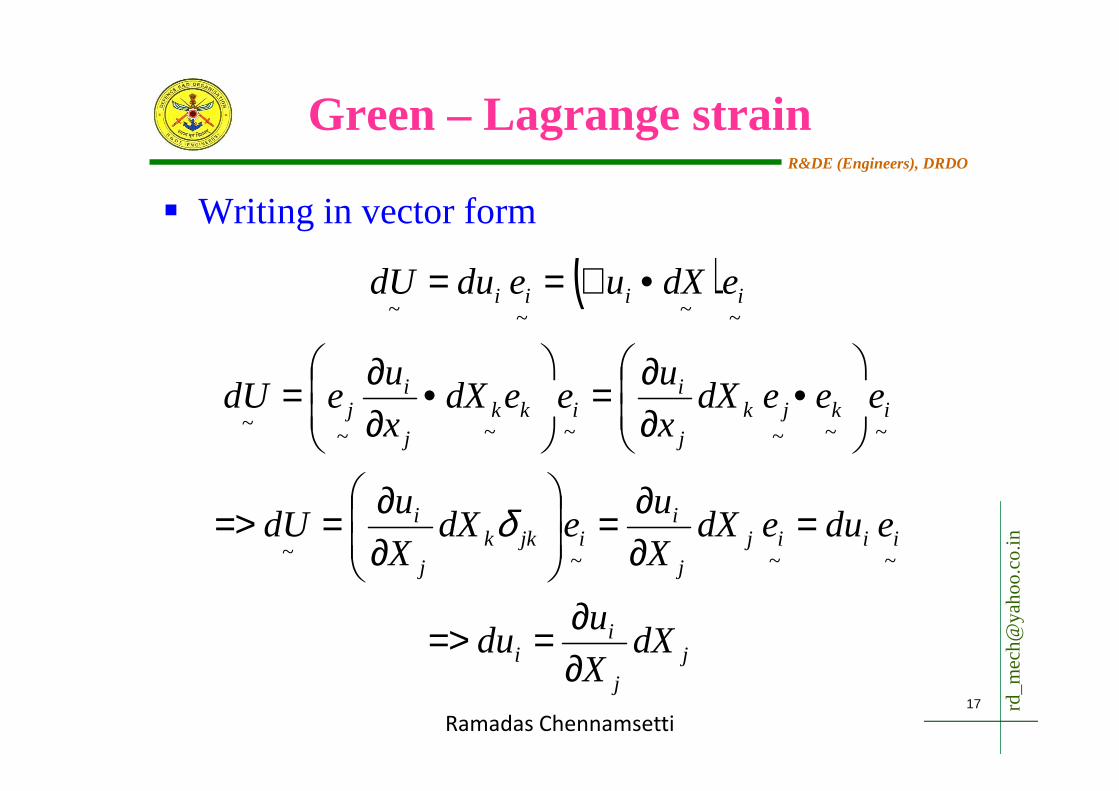
Writing in vector form
( )ii
iiii
eeedXu
eedXu
edU
edXuedudU
•∂=
•∂=
•∇==~~~~
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
17
jj
ii
iiijj
iijkk
j
i
ikjkj
iikk
j
ij
dXX
udu
eduedXX
uedX
X
udU
eeedXx
eedXx
edU
∂∂==>
=∂∂=
∂∂==>
•
∂=
•
∂=
~~~~
~~~~~~~
δ
R&DE (Engineers), DRDO
Green – Lagrange strain
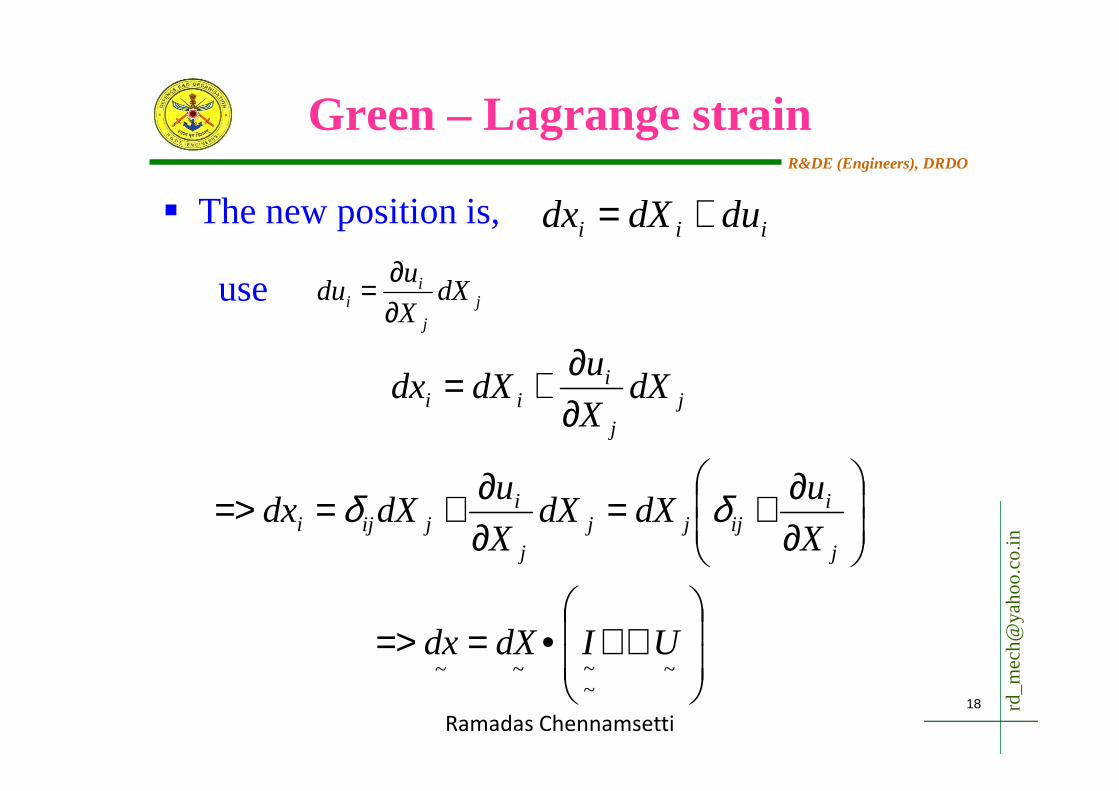
The new position is,iii dudXdx +=
use jj
ii dX
X
udu
∂∂=
∂∂+= dXX
udXdx j
iii
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
18
∇+•==>
∂∂+=
∂∂+==>
∂+=
~~~~~
UIdXdx
X
udXdX
X
udXdx
dXX
dXdx
j
iijjj
j
ijiji
jj
ii
δδ
R&DE (Engineers), DRDO
Green – Lagrange strain
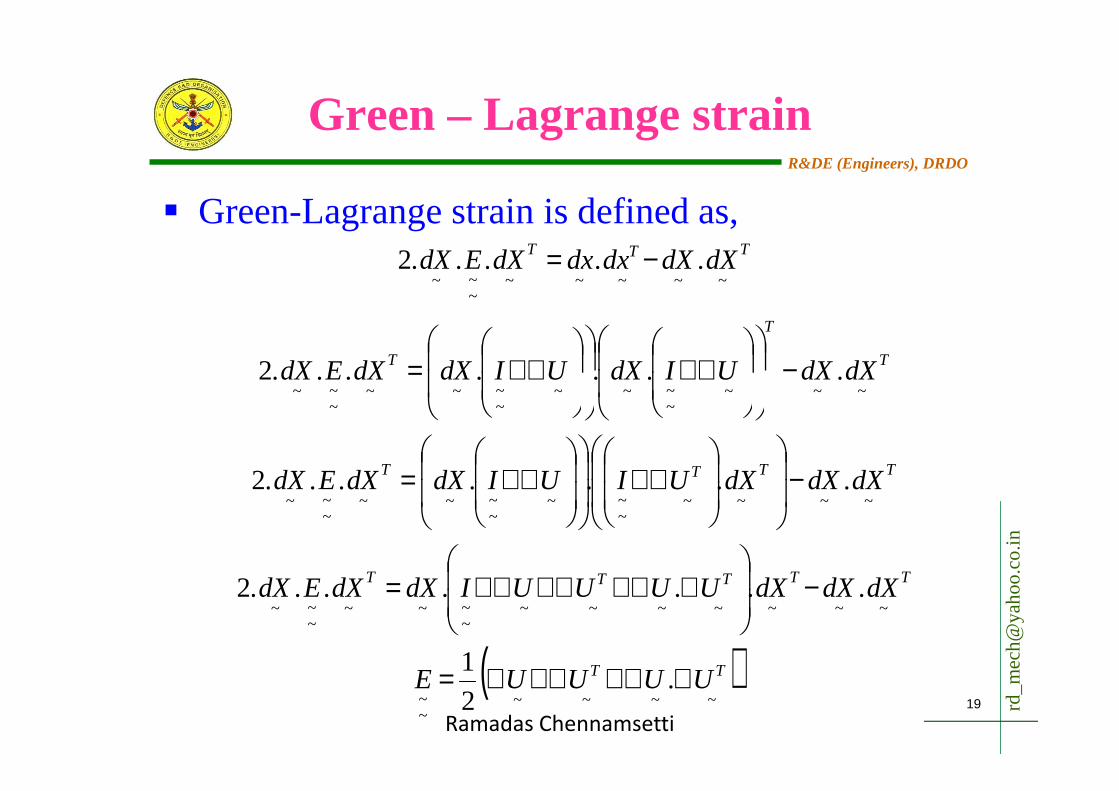
Green-Lagrange strain is defined as,
~~~~~~~~~~~
~~~~~~~~
.......2
.....2
T
T
T
TTT
dXdXUIdXUIdXdXEdX
dXdXdxdxdXEdX
−
∇+
∇+=
−=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
19
( )~~~~
~~
~~~~~~~~~~~
~~~
~~~~~~~
~~~~
~~~
~~~~~~~
~~~~
~~~
.2
1
.......2
.......2
TT
TTTTT
TTTT
UUUUE
dXdXdXUUUUIdXdXEdX
dXdXdXUIUIdXdXEdX
∇∇+∇+∇=
−
∇∇+∇+∇+=
−
∇+
∇+=
R&DE (Engineers), DRDO
Green – Lagrange strain
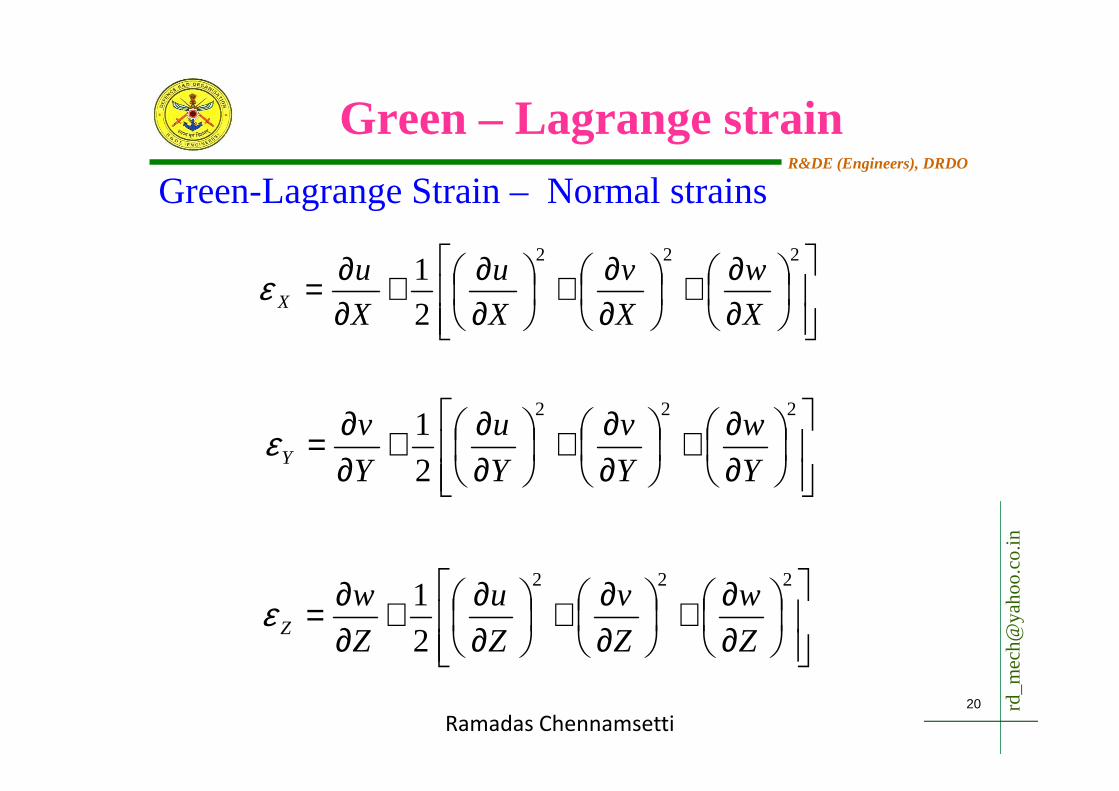
∂∂+
∂∂+
∂∂+
∂∂=
222
2
1
X
w
X
v
X
u
X
uXε
Green-Lagrange Strain – Normal strains
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
20
∂∂+
∂∂+
∂∂+
∂∂=
222
2
1
Y
w
Y
v
Y
u
Y
vYε
∂∂+
∂∂+
∂∂+
∂∂=
222
2
1
Z
w
Z
v
Z
u
Z
wZε
R&DE (Engineers), DRDO
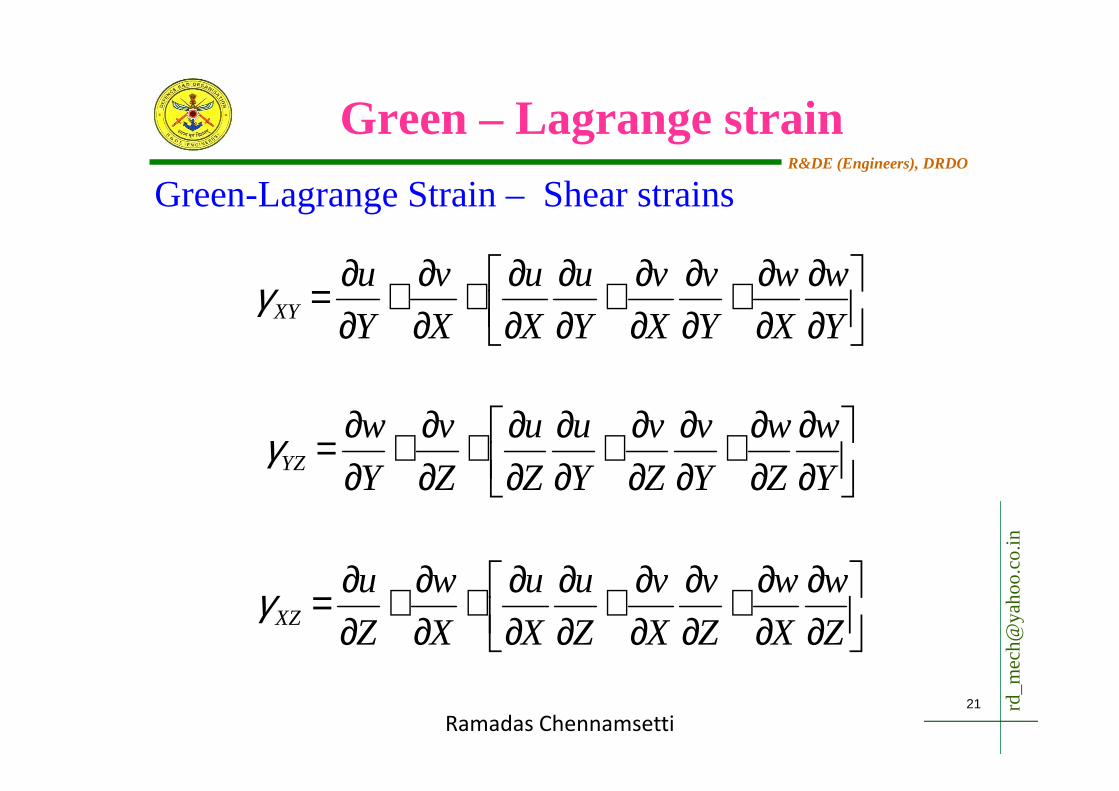
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂+
∂∂+
∂∂=
Y
w
X
w
Y
v
X
v
Y
u
X
u
X
v
Y
uXYγ
Green – Lagrange strain
Green-Lagrange Strain – Shear strains
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
21
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂+
∂∂+
∂∂=
Y
w
Z
w
Y
v
Z
v
Y
u
Z
u
Z
v
Y
wYZγ
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂+
∂∂+
∂∂=
Z
w
X
w
Z
v
X
v
Z
u
X
u
X
w
Z
uXZγ
R&DE (Engineers), DRDO
Green – Lagrange strain
Green-Lagrange strain captures finite deflections, strains and rotations – non-linear terms
Infinitesimal strains, rotations => linear terms –non-linear terms – much smaller than linear terms
∂ u
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
22
Small strains known as engineering strains Engineering strains – denoted by => εij
1<<∂∂
j
i
x
u
R&DE (Engineers), DRDO
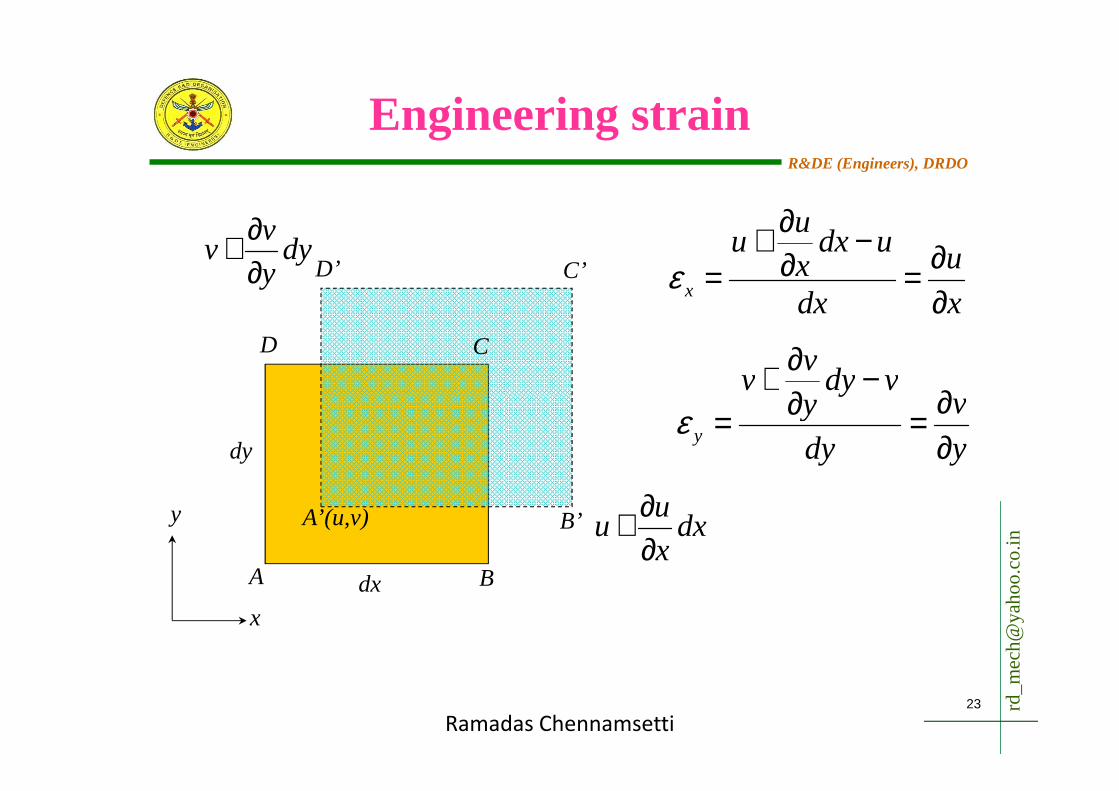
Engineering strain
dyy
vv
∂∂+
CD
C’D’
x
u
dx
udxx
uu
x ∂∂=
−∂∂+
=ε
vvdy
y
vv
∂−
∂∂+
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
23
dxx
uu
∂∂+
dx
dy
A B
A’(u,v) B’ dxx
uu
∂∂+
x
y
y
v
dy
vdyy
v
y ∂∂=
−∂
+=ε
R&DE (Engineers), DRDO
Engineering strain
∂∂+ dyy
vvu,
CD
C’D’
∂∂+
∂∂+ dy
y
vvdy
y
uu , C”
D”
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
24
∂∂+ vdxx
uu ,
dx
dy
A B
CD
A’(u,v) B’
x
y
∂∂+
∂∂+ dx
x
vvdx
x
uu ,
B”
θ1
θ2
R&DE (Engineers), DRDO
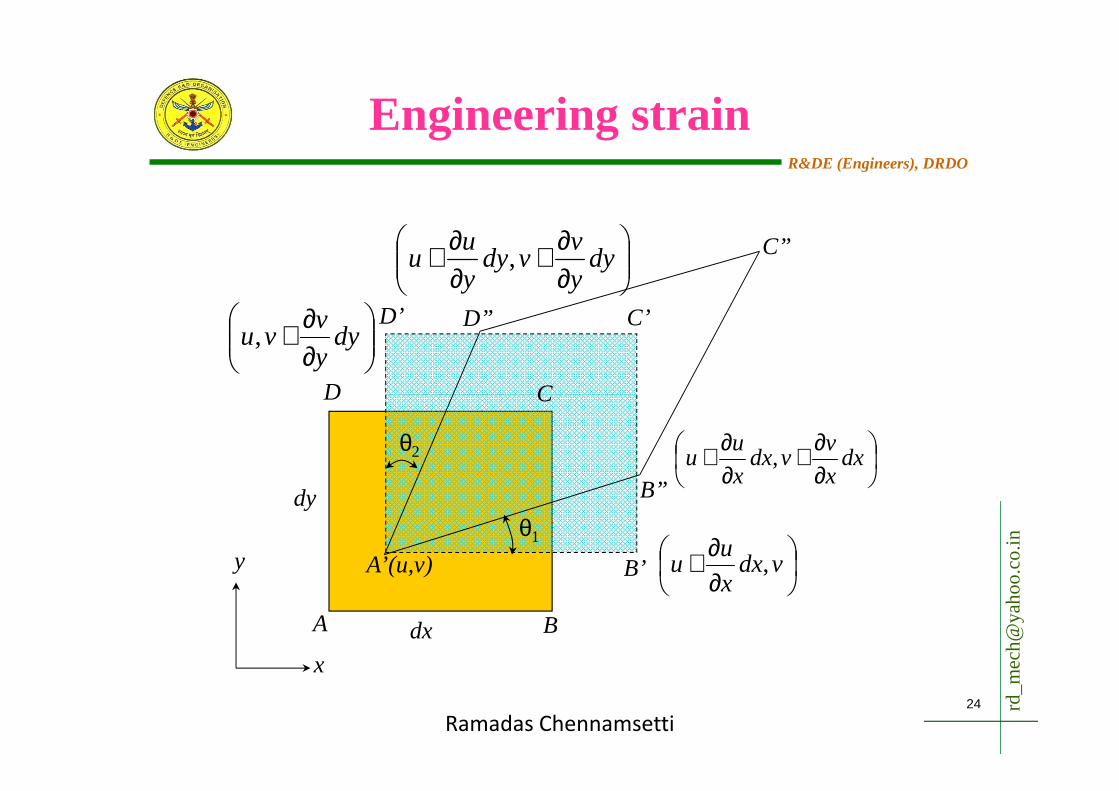
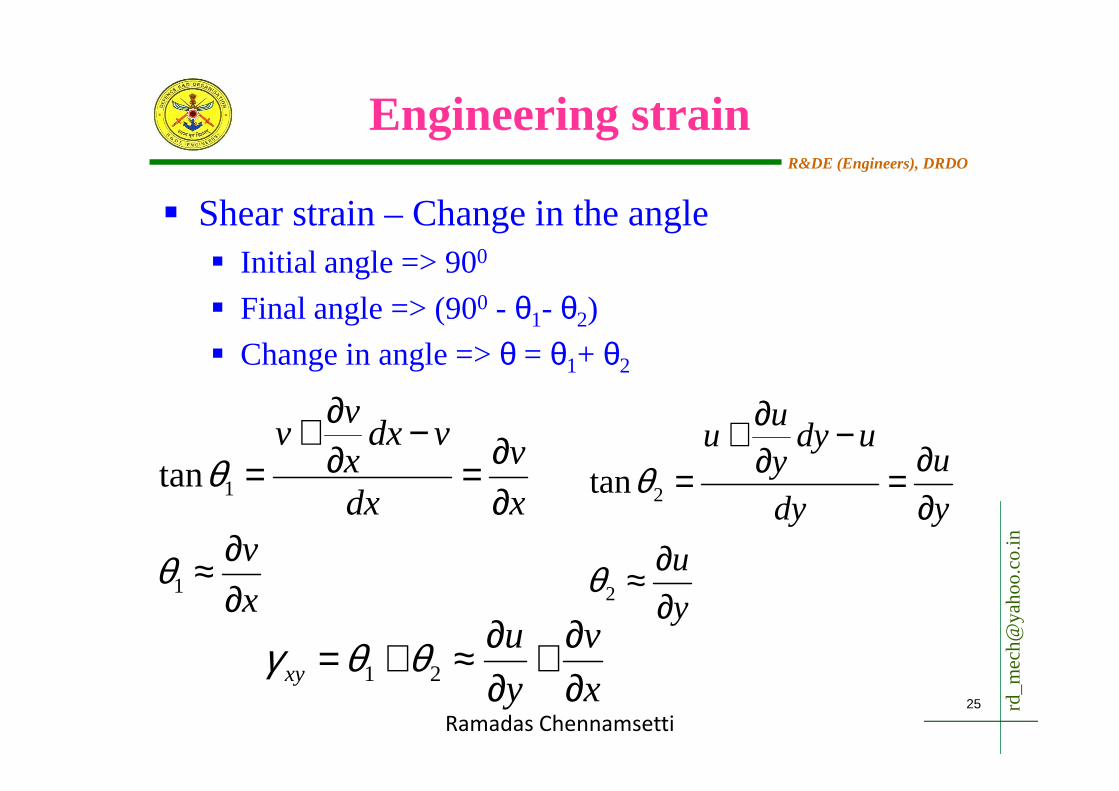
Engineering strain
Shear strain – Change in the angle Initial angle => 900
Final angle => (900 - θ1- θ2)
Change in angle => θ = θ1+ θ2
v∂ u∂
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
25
x
vx
v
dx
vdxx
vv
∂∂≈
∂∂=
−∂∂+
=
1
1tan
θ
θ
y
u
y
u
dy
udyy
uu
∂∂≈
∂∂=
−∂∂+
=
2
2tan
θ
θ
x
v
y
uxy ∂
∂+∂∂≈+= 21 θθγ
R&DE (Engineers), DRDO
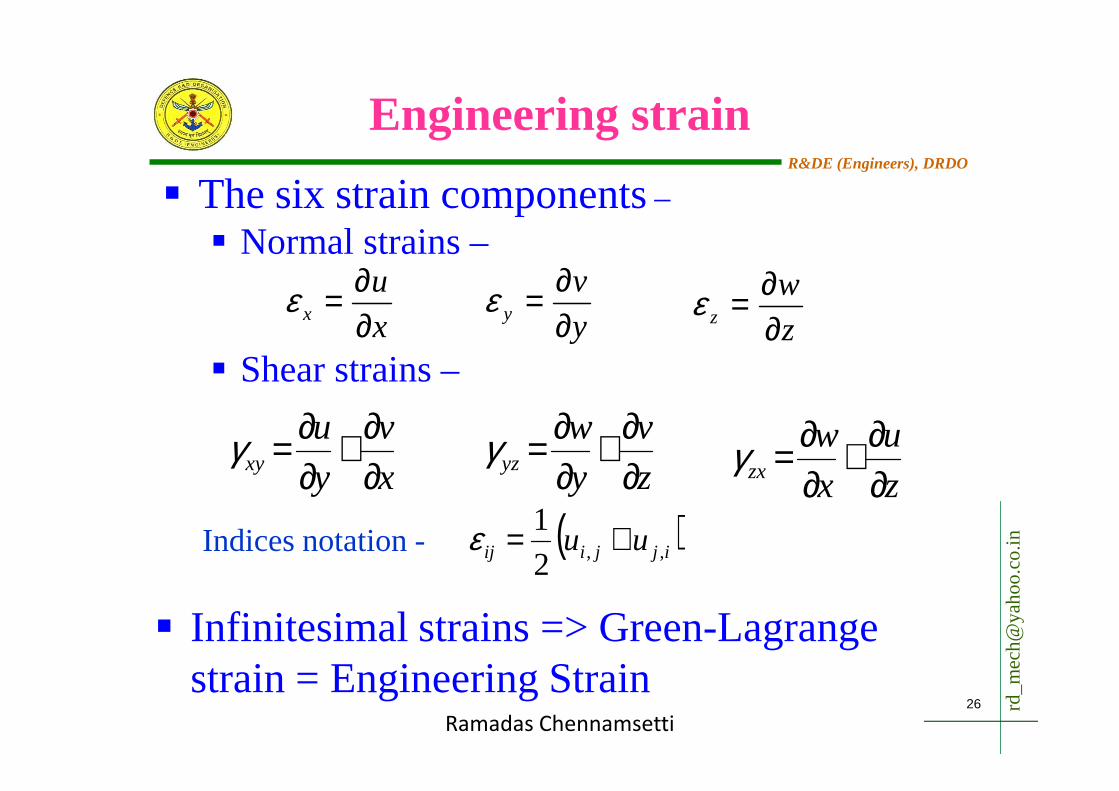
Engineering strain
The six strain components–
Normal strains –
Shear strains –x
ux ∂
∂=εy
vy ∂
∂=εz
wz ∂
∂=ε
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
26
x
v
y
uxy ∂
∂+∂∂=γ
z
v
y
wyz ∂
∂+∂∂=γ
z
u
x
wzx ∂
∂+∂∂=γ
Indices notation - ( )ijjiij uu ,,2
1 +=ε
Infinitesimal strains => Green-Lagrange strain = Engineering Strain
R&DE (Engineers), DRDO
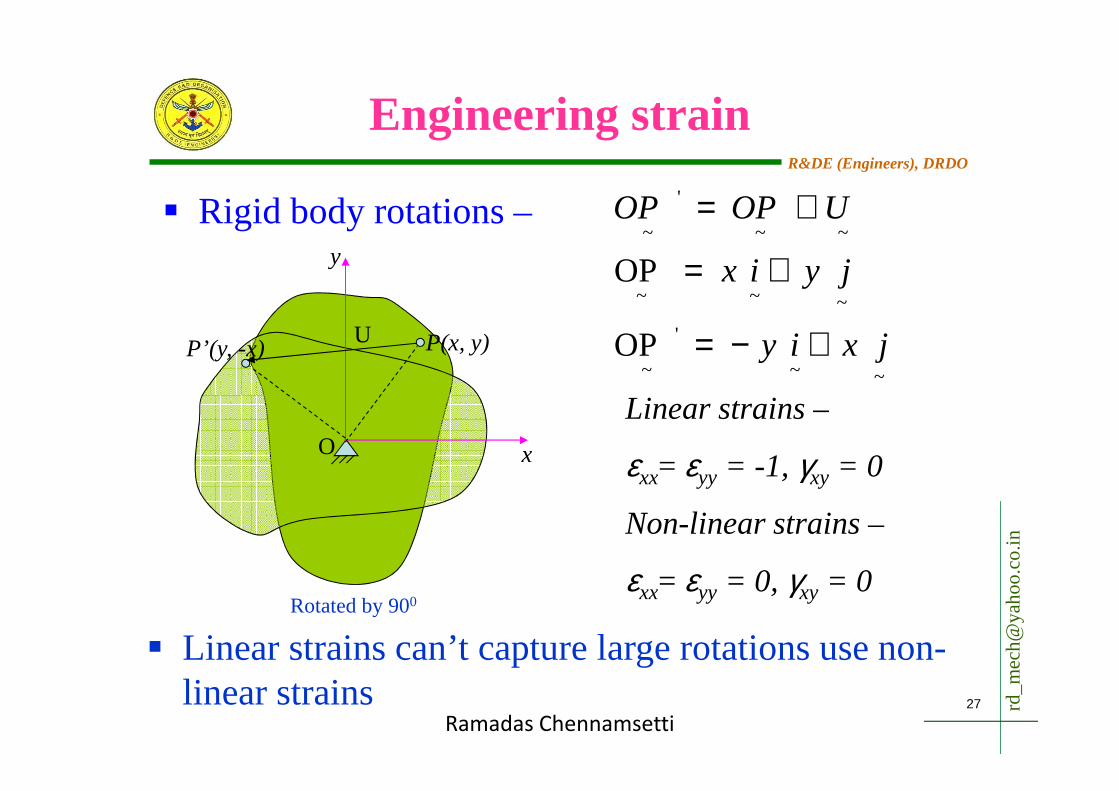
Engineering strain
Rigid body rotations –y
P(x, y)P’(y, -x)U
~~~
'
~~~
~~~
'
OP
OP
jxiy
jyix
UOPOP
+−=
+=
+=
Linear strains–
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
27
xO
Linear strains–
εxx= εyy = -1, γxy = 0
Non-linear strains –
εxx= εyy = 0, γxy = 0Rotated by 900
Linear strains can’t capture large rotations use non-linear strains
R&DE (Engineers), DRDO
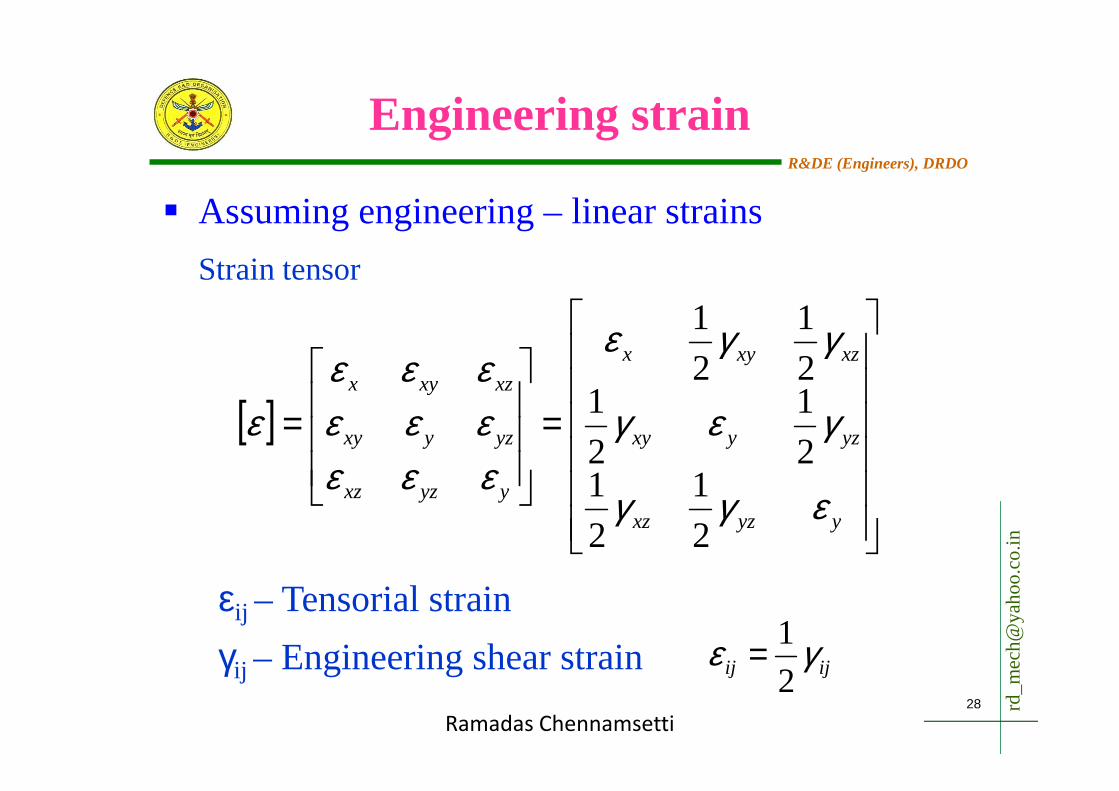
Engineering strain
Assuming engineering – linear strains
[ ]
xzxyx
xzxyx
γγεεεε
112
1
2
1Strain tensor
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
28
[ ]
=
=
yyzxz
yzyxy
yyzxz
yzyxy
εγγ
γεγεεεεεεε
2
1
2
12
1
2
1
εij – Tensorial strain
γij – Engineering shear strain ijij γε2
1=
R&DE (Engineers), DRDO
Displacement gradient
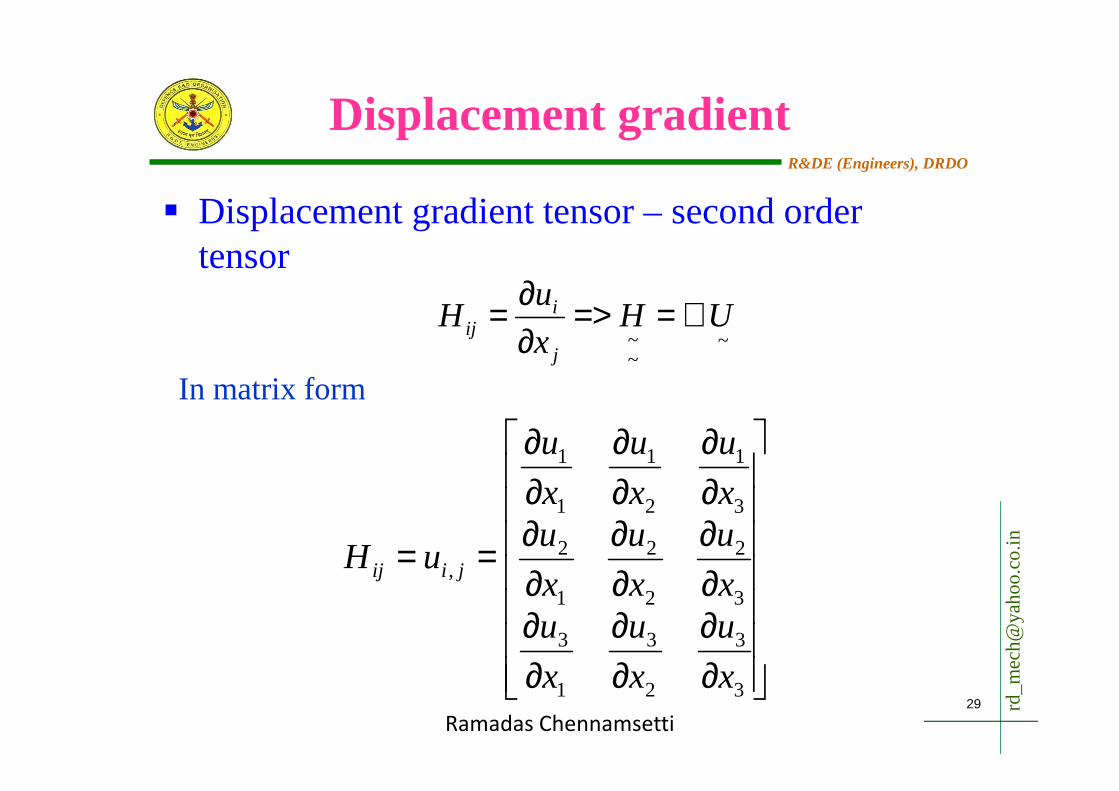
Displacement gradient tensor – second order tensor
~~~
UHx
uH
j
iij ∇==>
∂∂=
In matrix form
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
29
In matrix form
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
==
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
,
x
u
x
u
x
ux
u
x
u
x
ux
u
x
u
x
u
uH jiij
R&DE (Engineers), DRDO
Displacement gradient
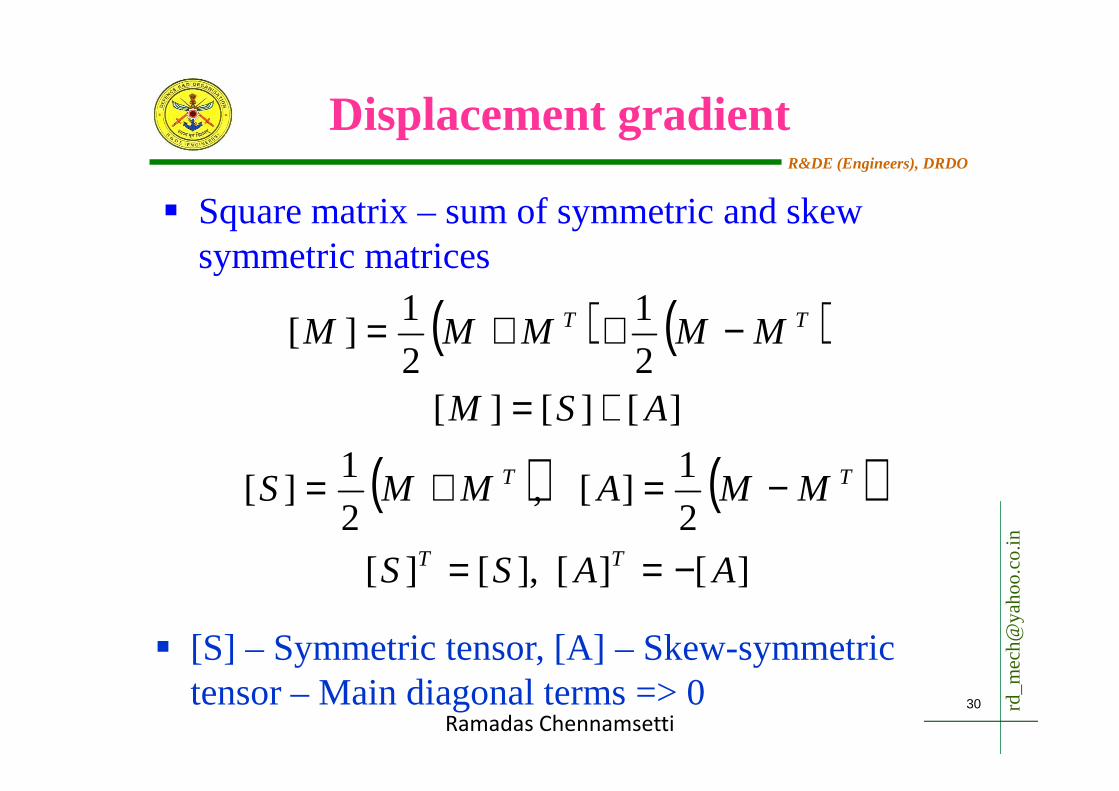
Square matrix – sum of symmetric and skew symmetric matrices
( ) ( )][][][
2
1
2
1][
ASM
MMMMM TT
+=
−++=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
30
( ) ( )][][ ],[][
2
1][ ,
2
1][
][][][
AASS
MMAMMS
ASM
TT
TT
−==
−=+=
+=
[S] – Symmetric tensor, [A] – Skew-symmetric tensor – Main diagonal terms => 0
R&DE (Engineers), DRDO
Displacement gradient
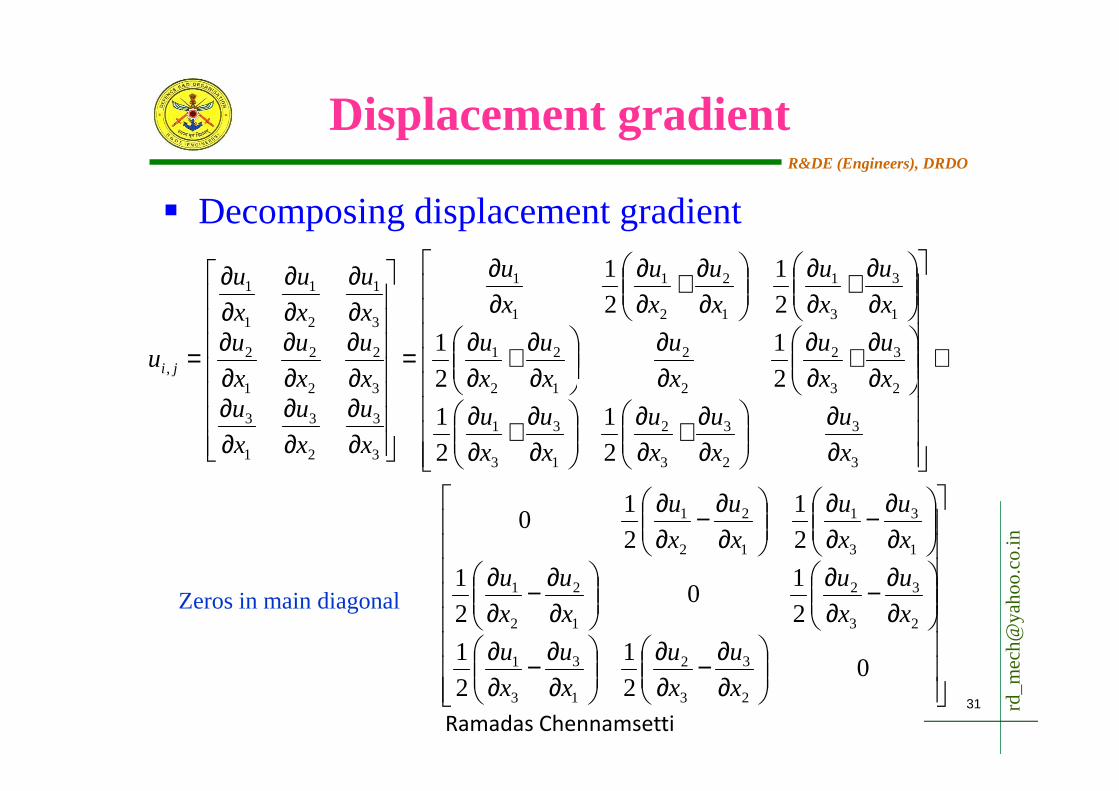
Decomposing displacement gradient
+
∂∂+
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
=
∂∂∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=2
1
2
1
2
1
2
1
2
3
3
2
2
2
1
2
2
1
1
3
3
1
1
2
2
1
1
1
3
2
2
2
1
2
3
1
2
1
1
1
, x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
uuux
u
x
u
x
ux
u
x
u
x
u
u ji
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
31
∂∂−
∂∂
∂∂−
∂∂
∂∂−
∂∂
∂∂−
∂∂
∂∂−
∂∂
∂∂−
∂∂
∂∂
∂∂+
∂∂
∂∂+
∂∂
∂∂
∂∂
∂∂
02
1
2
1
2
10
2
1
2
1
2
10
2
1
2
1
2
3
3
2
1
3
3
1
2
3
3
2
1
2
2
1
1
3
3
1
1
2
2
1
3
3
2
3
3
2
1
3
3
1
23212
3
3
2
3
1
3
321
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
u
x
ux
u
x
u
x
u
Zeros in main diagonal
R&DE (Engineers), DRDO
Displacement gradient
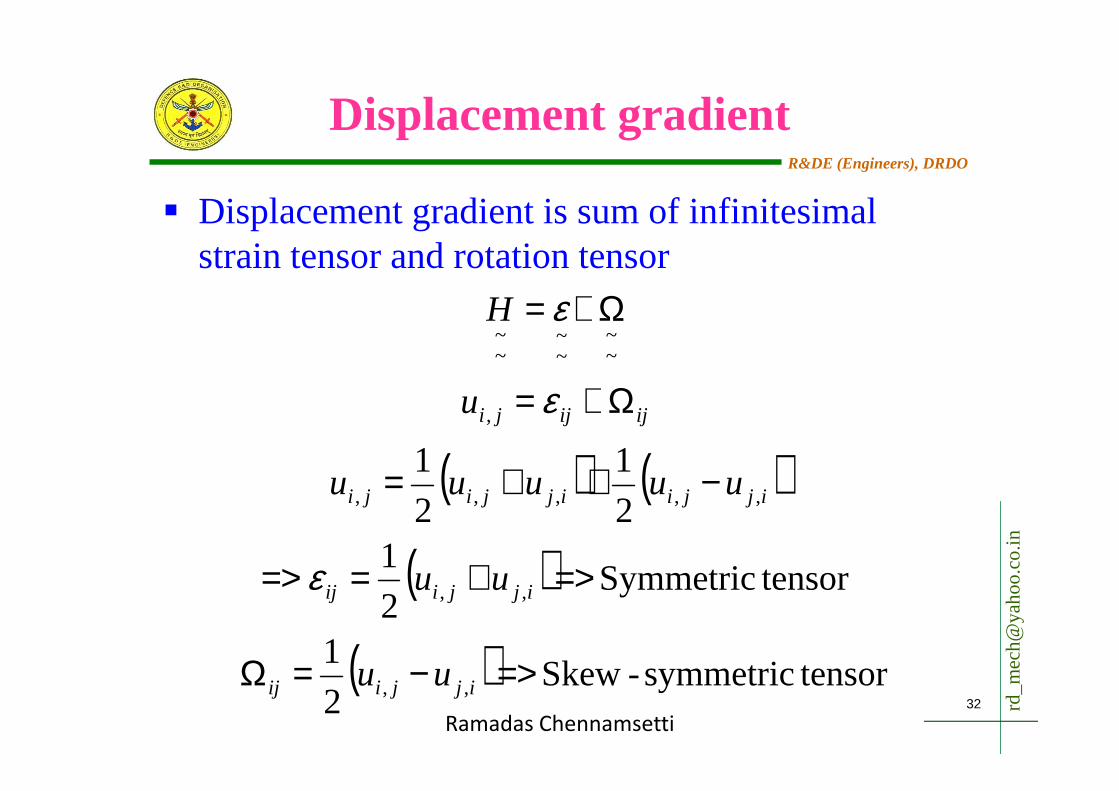
Displacement gradient is sum of infinitesimal strain tensor and rotation tensor
~~
~~
~~
Ω+=
Ω+=
u
H
ε
ε
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
32
( ) ( )
( )
( ) tensorsymmetric-Skew 2
1
tensorSymmetric 2
12
1
2
1
,,
,,
,,,,,
,
=>−=Ω
=>+==>
−++=
Ω+=
ijjiij
ijjiij
ijjiijjiji
ijijji
uu
uu
uuuuu
u
ε
ε
R&DE (Engineers), DRDO
Displacement gradient
If displacement gradient is symmetric => ui,j = uj,i
Rotation tensor becomes zero – only strain tensor exists
Displacement gradient = strain tensor
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
33
Displacement gradient = strain tensor
( )ijjiji
ijji
uuu
uu
,,,
,,
2
1 +=
=
R&DE (Engineers), DRDO
Rotation vector
Rotation vector is defined as
×∂∂
=×∂∂=
×∇=
~~~~~
~~
2
1
2
12
1
eex
ueu
xe
U
jii
jjj
iiω
ω
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
34
∂∂−
∂∂==>==
∂∂
==>∂∂
=
∂∂
1
3
3
13
~~
~~~~~
2
1 2 1, j i, 3,k Say,
2
1
2
1
22
x
u
x
u
x
ue
x
u
xx
ijki
jkkijk
i
j
ii
ω
εωεω
ω represents components of rigid body rotations
R&DE (Engineers), DRDO
Rotation vector
Relation between rotation vector and tensor
gradient nt Displaceme
2
1
jijij
ijki
jk
u
ex
u
Ω+=∂∂
=>
∂∂
=
ε
ω
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
35
( ) ( ) 2
1
2
1
gradient nt Displaceme
jikjijikjiijkjijik
jijii
eee
x
Ω+−=Ω+=
Ω+=∂
=>
εεω
ε
eijk – skew symmetric matrix in ‘i’, ‘j’
lmkjikjiklmkjikjik eeee Ω−==>Ω−=2
1
2
1 ωω
R&DE (Engineers), DRDO
Rotation vector
Multiplication of two permutations
lmkjikjiklmkjikjik eeee
−=
Ω−==>Ω−=
δδδδ
ωω2
1
2
1
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
36
( ) ( )
lmklmk
mllmiljmimjljiklmk
iljmimjllmkjik
e
e
ee
Ω=−
Ω−Ω−=−Ω−=
−=
ω
δδδδω
δδδδ
2
1
2
1
R&DE (Engineers), DRDO
Rotation vector
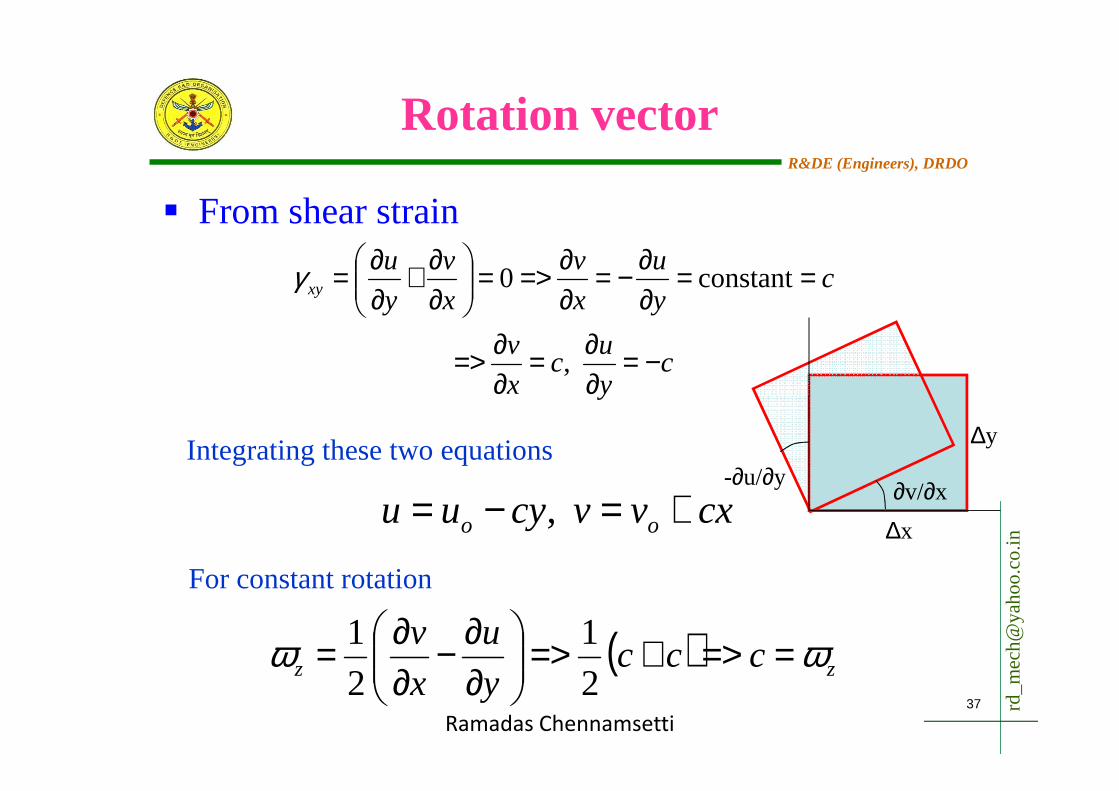
From shear strain
cy
uc
x
v
cy
u
x
v
x
v
y
uxy
−=∂∂=
∂∂=>
==∂∂−=
∂∂=>=
∂∂+
∂∂=
,
constant0γ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
37
yx ∂∂
Integrating these two equations
cxvvcyuu oo +=−= ,
For constant rotation
( ) zz cccy
u
x
v ωω ==>+=>
∂∂−
∂∂=
2
1
2
1
∆x
∆y
∂v/∂x-∂u/∂y
R&DE (Engineers), DRDO
Rotation vector
The displacements are
Extending the same procedure to 3D rigid body rotations – all shear strains => 0
xvvyuu zozo ωω +=−= ,
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
38
rotations – all shear strains => 0
Integrate these equations – integration constants
0=∂∂+
∂∂=
x
v
y
uxyγ 0=
∂∂+
∂∂=
z
v
y
wyzγ 0=
∂∂+
∂∂=
z
u
x
wzxγ
R&DE (Engineers), DRDO
Rotation vector
Integration constants – rigid body translations and rotations
yxww
xzvv
zyuu
zxo
yzo
ωωωωωω
+−=+−=
+−=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
39
Rigid body translations and rotations don’t contribute to strains and stresses – may be dropped
Basic assumption – small deformation theory Small deformation theory – Principle of
superposition
yxww xyo ωω +−=
R&DE (Engineers), DRDO
Transformation of strain
Strain – second order tensor
Transformation rules of any second order tensor –applicable – ex. Stress tensor
Transformation of stress tensor
Transformation of strain tensor
mnjnimij ll σσ ='
ll εε ='
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
40
Transformation of strain tensor
In matrix notation mnjnimij ll εε ='
[ ] [ ][ ][ ]TTT εε ='
[T] – Transformation matrix => direction cosines
R&DE (Engineers), DRDO
Principal strains
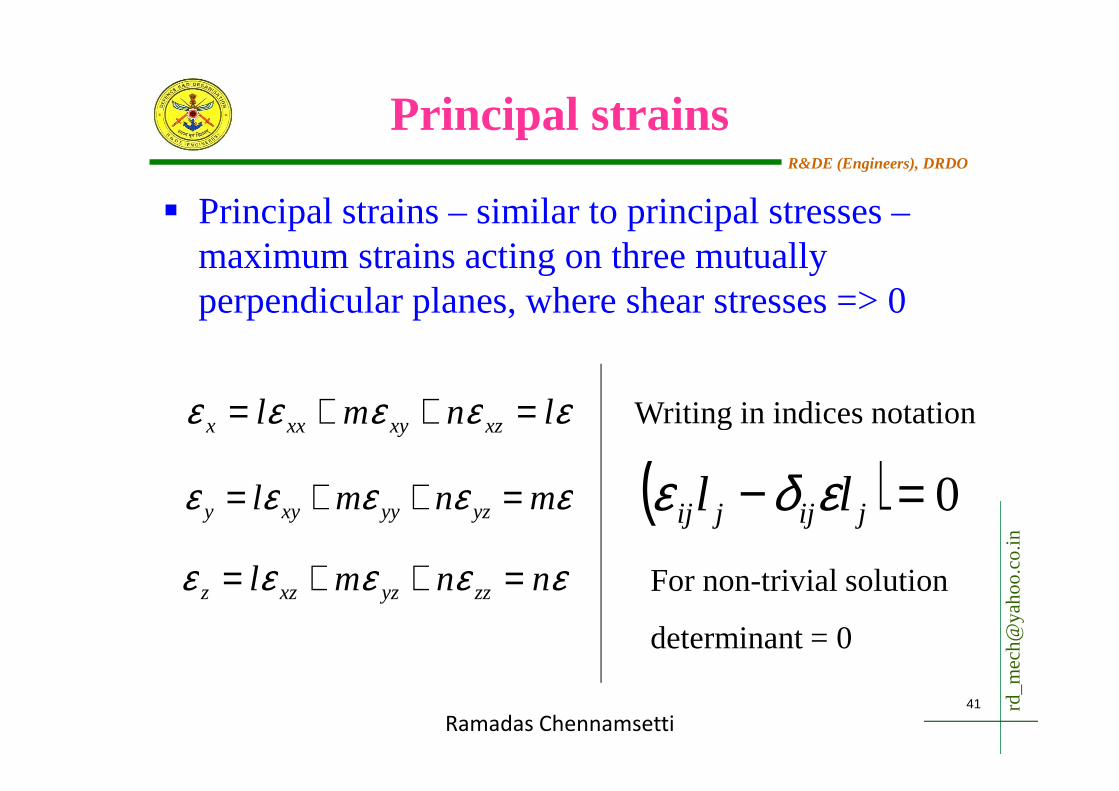
Principal strains – similar to principal stresses –maximum strains acting on three mutually perpendicular planes, where shear stresses => 0
εεεεε lnml =++= Writing in indices notation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
41
εεεεε lnml xzxyxxx =++=
εεεεε mnml yzyyxyy =++=
εεεεε nnml zzyzxzz =++=
Writing in indices notation
( ) 0=− jijjij ll εδεFor non-trivial solution
determinant = 0
R&DE (Engineers), DRDO
Principal strains
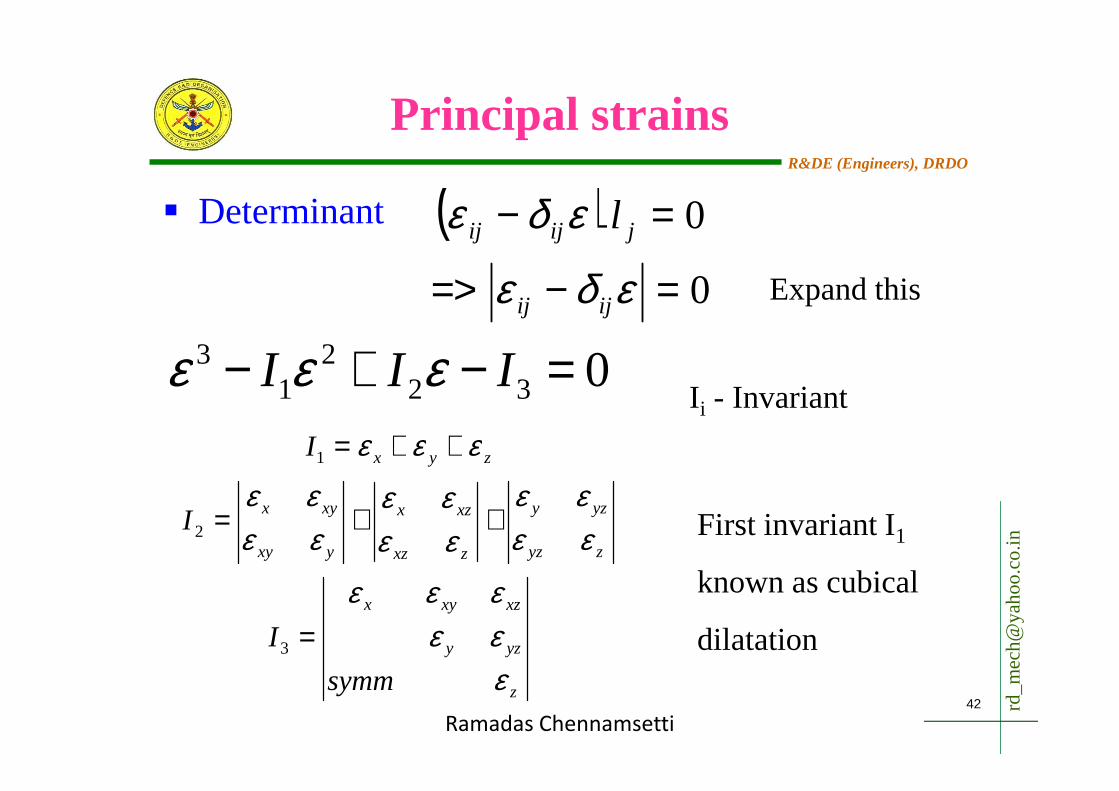
Determinant ( )0
0
=−=>
=−
εδε
εδε
ijij
jijij l
Expand this
0322
13 =−+− III εεε
I - Invariant
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
42
0321 =−+− III εεεI i - Invariant
z
yzy
xzxyx
zyz
yzy
zxz
xzx
yxy
xyx
zyx
symm
I
I
I
εεεεεε
εεεε
εεεε
εεεε
εεε
=
++=
++=
3
2
1
First invariant I1
known as cubical
dilatation
R&DE (Engineers), DRDO
Strain decomposition
Hydrostatic part represents volume deformation –isotropic tensor – same in all direction
Volumetric strains – accounts for change in size or volume only
Deviatoric strain tensor – accounts for change in
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
43
Deviatoric strain tensor – accounts for change in shape – distortion of material
Physically εd => deviation of strain from 1/3rd of pure cubical dilatation
Tr[εd] = 0 => Trace of deviatoric strain tensor is zero
R&DE (Engineers), DRDO
Strain compatibility
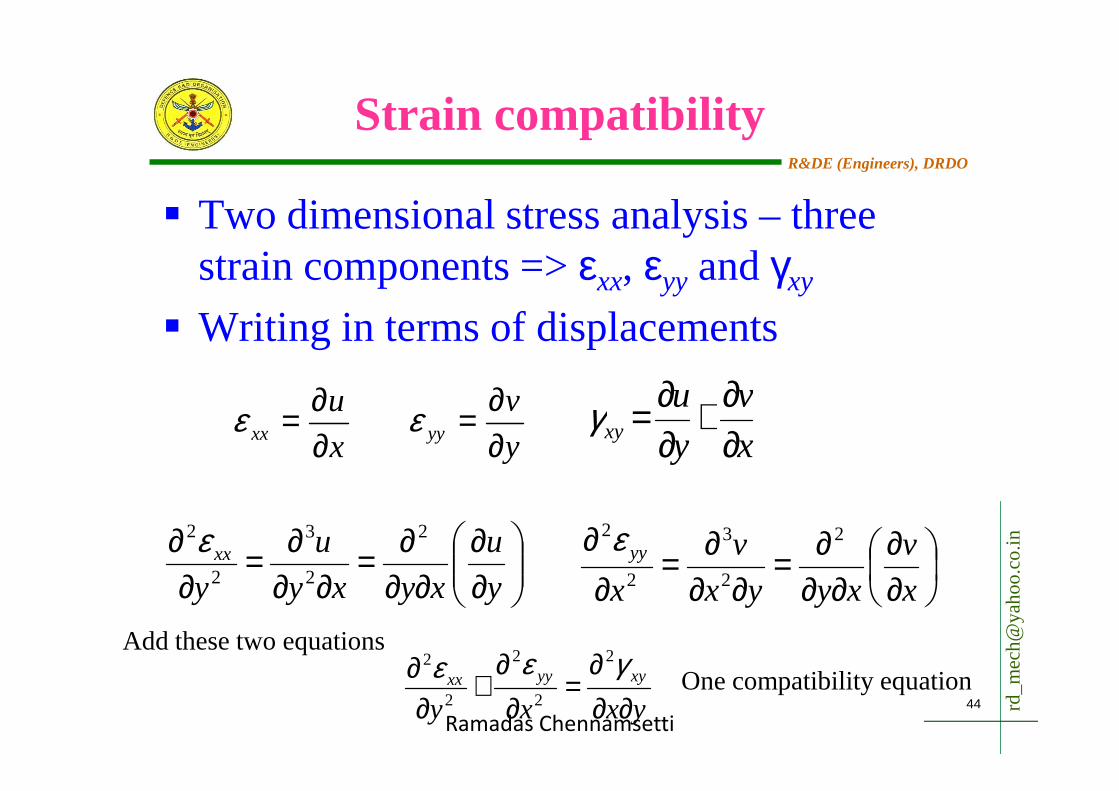
Two dimensional stress analysis – three strain components => εxx, εyy and γxy
Writing in terms of displacements
u∂ v∂ vu ∂+∂=γ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
44
x
uxx ∂
∂=εy
vyy ∂
∂=εx
v
y
uxy ∂
∂+∂∂=γ
∂∂
∂∂∂=
∂∂∂=
∂∂
y
u
xyxy
u
yxx
2
2
3
2
2ε
∂∂
∂∂∂=
∂∂∂=
∂∂
x
v
xyyx
v
xyy
2
2
3
2
2ε
Add these two equations
yxxyxyyyxx
∂∂∂
=∂
∂+
∂∂ γεε 2
2
2
2
2
One compatibility equation
R&DE (Engineers), DRDO
Strain compatibility
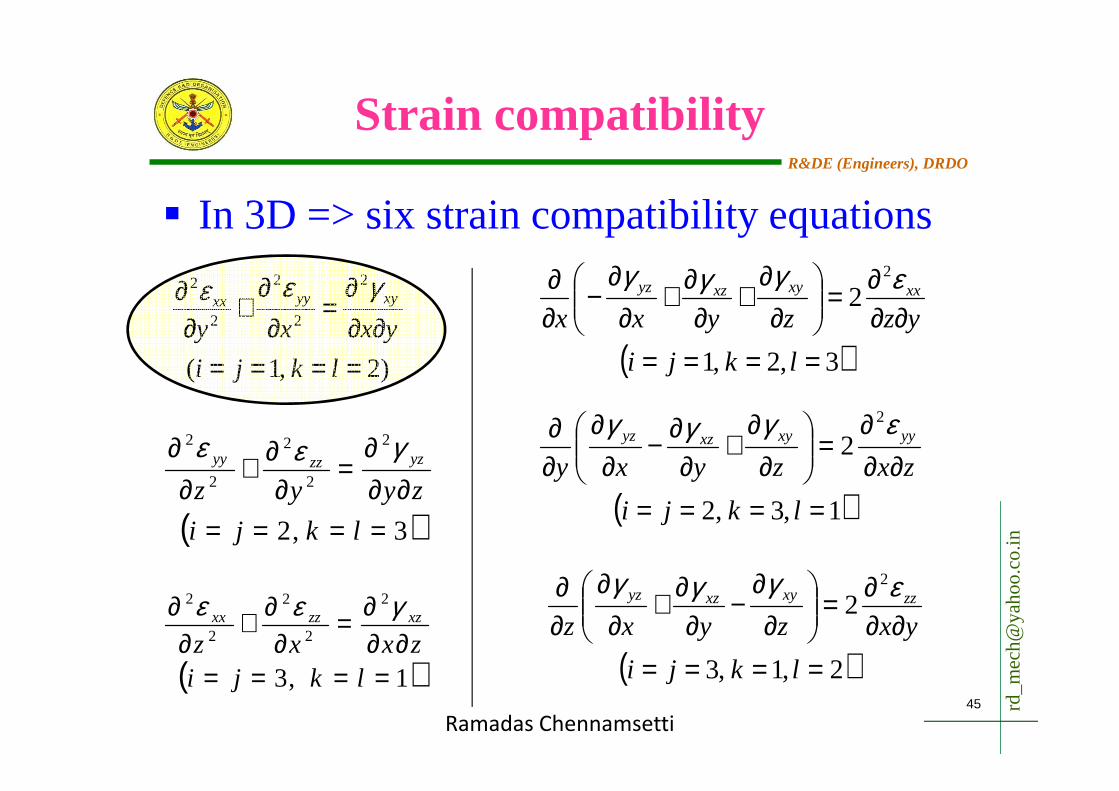
In 3D => six strain compatibility equations
2) ,1(
2
2
2
2
2
====∂∂
∂=
∂∂
+∂
∂
lkji
yxxyxyyyxx
γεε
( )3,2 ,1
22
====∂∂
∂=
∂∂
+∂
∂+∂
∂−
∂∂
lkji
yzzyxxxxxyxzyz εγγγ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
45
( )1 ,3
2
2
2
2
2
====∂∂
∂=∂
∂+∂
∂
lkjizxxzxzzzxx γεε
( )3 ,2
2
2
2
2
2
====∂∂
∂=
∂∂+
∂∂
lkji
zyyzyzzzyy γεε
( )1,3 ,2
22
====∂∂
∂=
∂∂
+∂
∂−∂
∂∂∂
lkji
zxzyxyyyxyxzyz εγγγ
( )2,1 ,3
22
====∂∂
∂=
∂∂
−∂
∂+∂
∂∂∂
lkji
yxzyxzzzxyxzyz εγγγ
R&DE (Engineers), DRDO
Strain compatibility
Six strain compatibility equations – no displacement term appears
Displacements – integration of strain –displacement relations
Six equations – three displacements => over
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
46
Six equations – three displacements => over constraining – can’t get a single valued displacements – ill-conditioned
For well conditioned system => Number of equations = number of unknowns
Three more extra equations required
R&DE (Engineers), DRDO
Strain compatibility
There exist relations among six strain components => Strain compatibility equations – six equation
Only three of them are independent
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
47
Only three of them are independent
Equation -
Displacements => 3
Strain-displacement relations => 6
Independent strain compatibility equations => 3
=> Number of unknowns = number of equations
R&DE (Engineers), DRDO
Strain compatibility
Satisfy strain compatibility equations => single valued displacement in the domain
Conversely – all six strain compatibility equations satisfied if displacement field is
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
48
equations satisfied if displacement field is single valued
Arbitrary selection of strains – fails to satisfy strain compatibility equations
R&DE (Engineers), DRDO
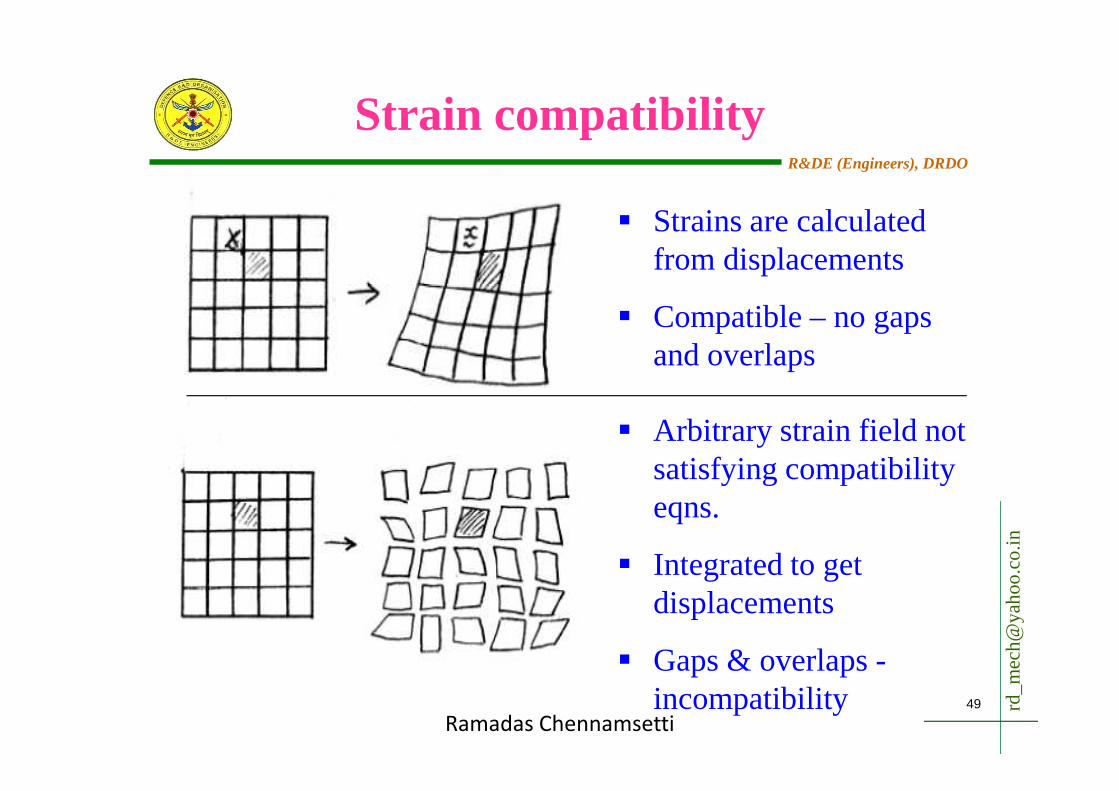
Strain compatibility
Strains are calculated from displacements
Compatible – no gaps and overlaps
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
49
Arbitrary strain field not satisfying compatibility eqns.
Integrated to get displacements
Gaps & overlaps -incompatibility
R&DE (Engineers), DRDO
Polar co-ordinates
Some geometries – cylindrical – easy to handle in cylindrical co-ordinates
Evaluate stress, strains, displacements etc in that co-ordinate system – ex. Radial and
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
50
that co-ordinate system – ex. Radial and Hoop stresses
Two different ways – Use strain-displacement relations in cartesian
co-ordinates – convert to polar co-ordinates
Derive from polar co-ordinates
R&DE (Engineers), DRDO
Polar co-ordinates
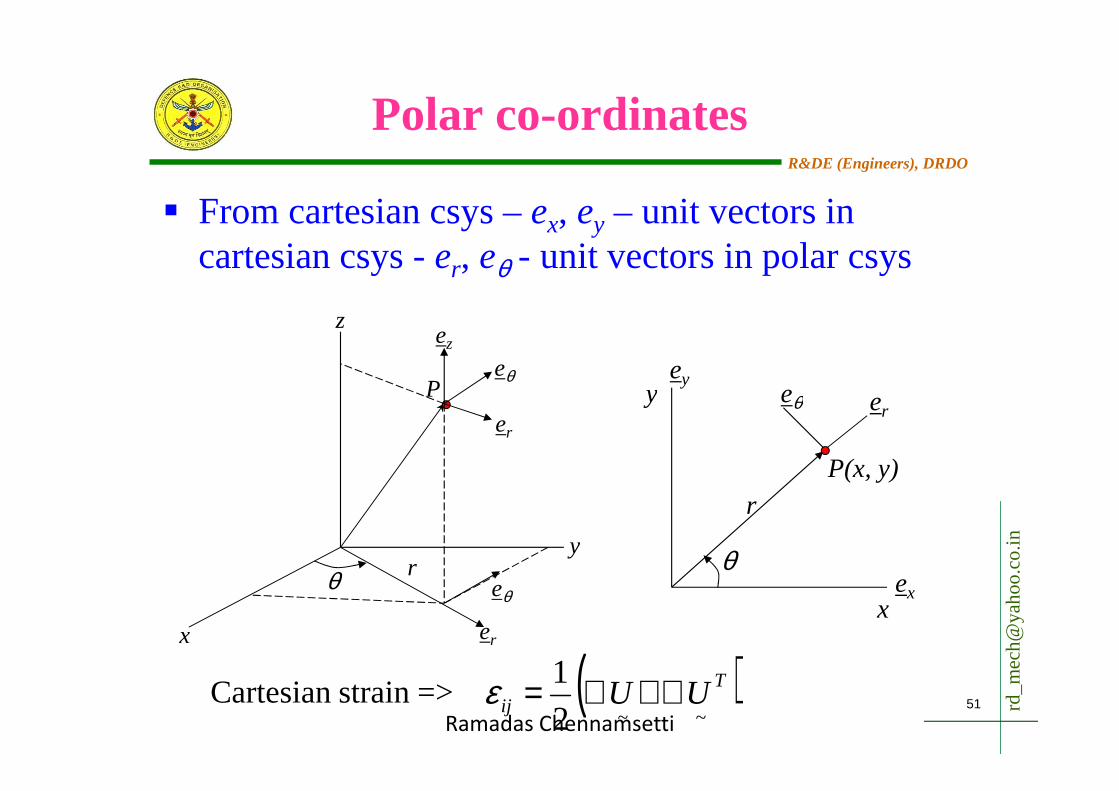
From cartesian csys –ex, ey – unit vectors in cartesian csys -er, eθ - unit vectors in polar csys
z
Peθ
ez
y eeθey
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
51
y
x
P
rθ
er
er
eθ
P(x, y)
x
y ereθ
r
θex
( )Tij UU
~~2
1 ∇+∇=εCartesian strain =>
R&DE (Engineers), DRDO
Polar co-ordinates
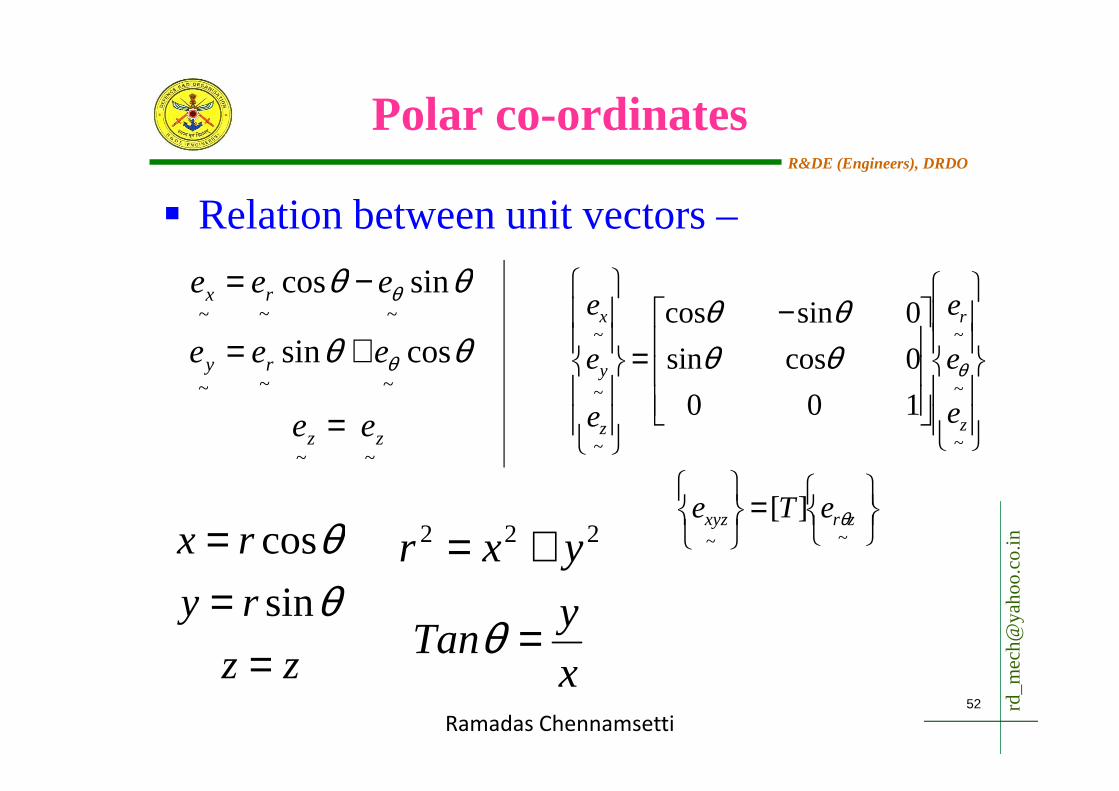
Relation between unit vectors –
~~~
~~~
cossin
sincos
ry
rx
eee
eee
+=
−=
θθ
θθ
θ
θ
−=
~
~
~
~
100
0cossin
0sincos r
y
x
e
e
e
e
e
θθθθθ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
52
~~
~
zz ee =
=
~~
~
~
~
~
][
100
zrxyz
zz
eTe
ee
θ
zz
ry
rx
===
θθ
sin
cos
x
yTan
yxr
=
+=
θ
222
R&DE (Engineers), DRDO
Polar co-ordinates
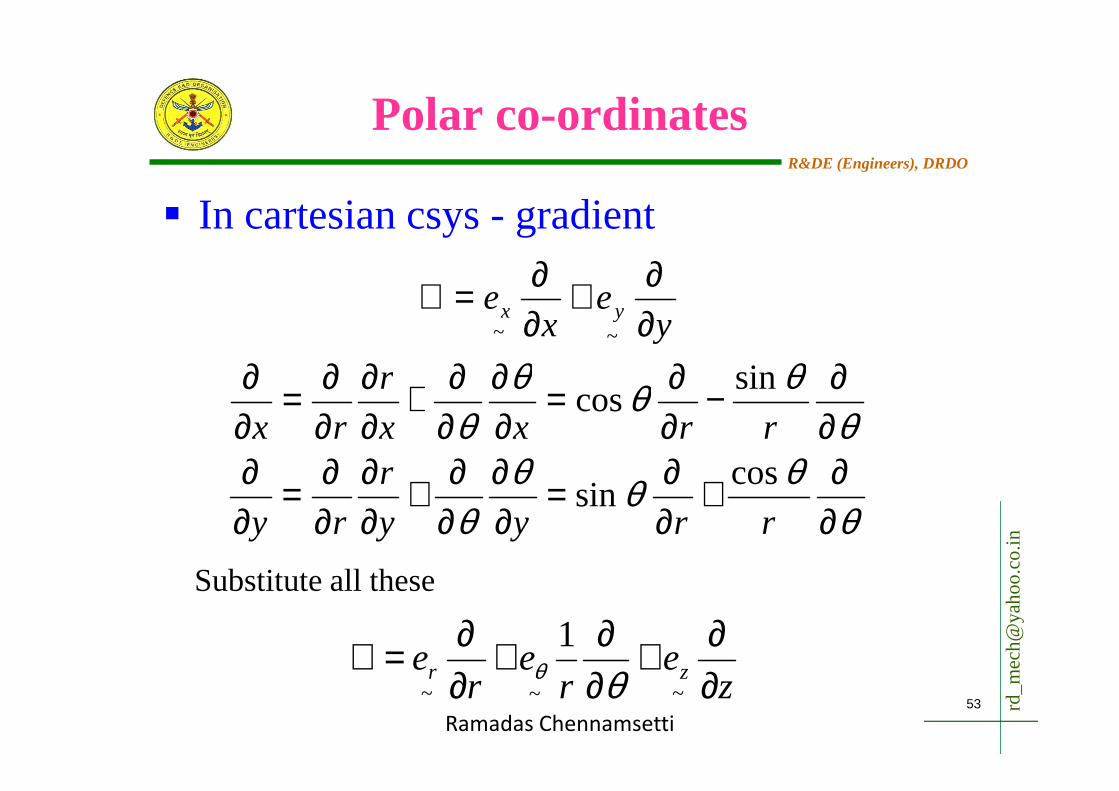
In cartesian csys - gradient
θθθ ∂−∂=∂∂+∂∂=∂∂∂+
∂∂=∇
r
ye
xe yx
sincos
~~
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
53
θθθθ
θ
θθθθ
θ
∂∂+
∂∂=
∂∂
∂∂+
∂∂
∂∂=
∂∂
∂∂−
∂∂=
∂∂
∂∂+
∂∂
∂∂=
∂∂
rryy
r
ry
rrxx
r
rxcos
sin
sincos
Substitute all these
ze
re
re zr ∂
∂+∂∂+
∂∂=∇
~~~
1
θθ
R&DE (Engineers), DRDO
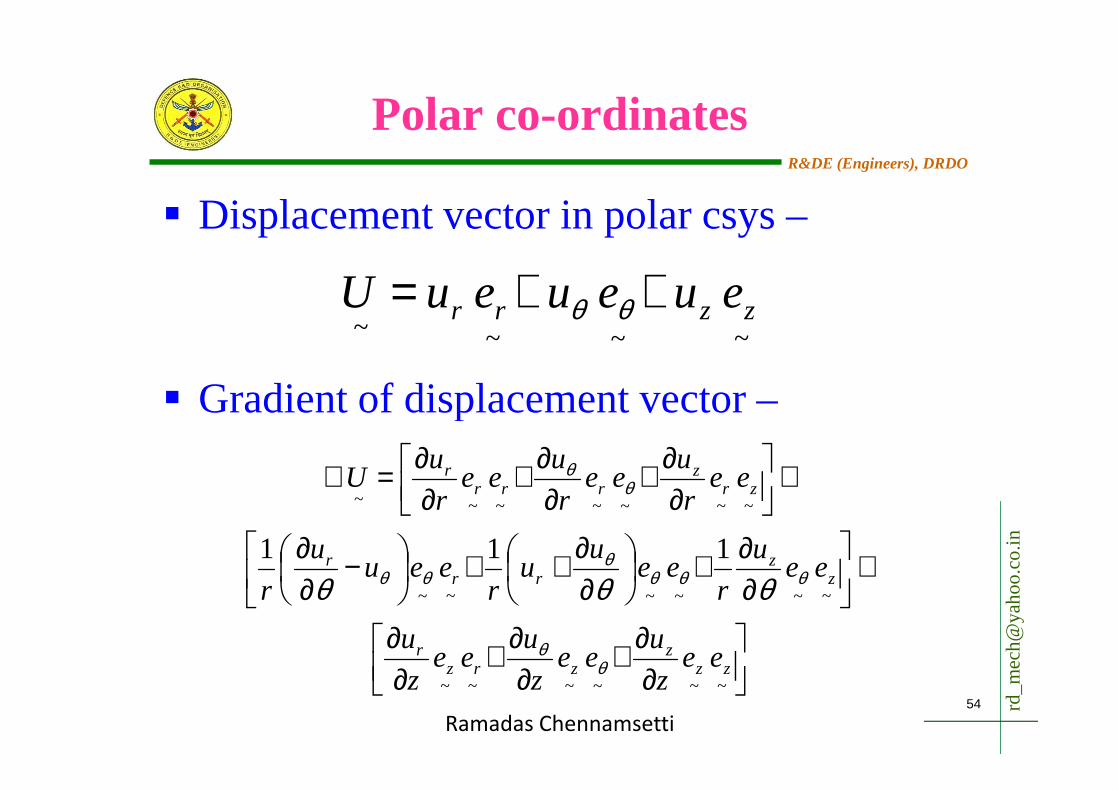
Polar co-ordinates
Displacement vector in polar csys –
Gradient of displacement vector –
~~~~zzrr eueueuU ++= θθ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
54
Gradient of displacement vector –
∂∂+
∂∂+
∂∂
+
∂∂+
∂∂++
−∂∂
+
∂∂+
∂∂+
∂∂=∇
~~~~~~
~~~~~~
~~~~~~~
111
zzz
zrzr
zz
rrr
zrz
rrrr
eez
uee
z
uee
z
u
eeu
ree
uu
reeu
u
r
eer
uee
r
uee
r
uU
θθ
θθθθ
θθ
θθ
θθθ
R&DE (Engineers), DRDO
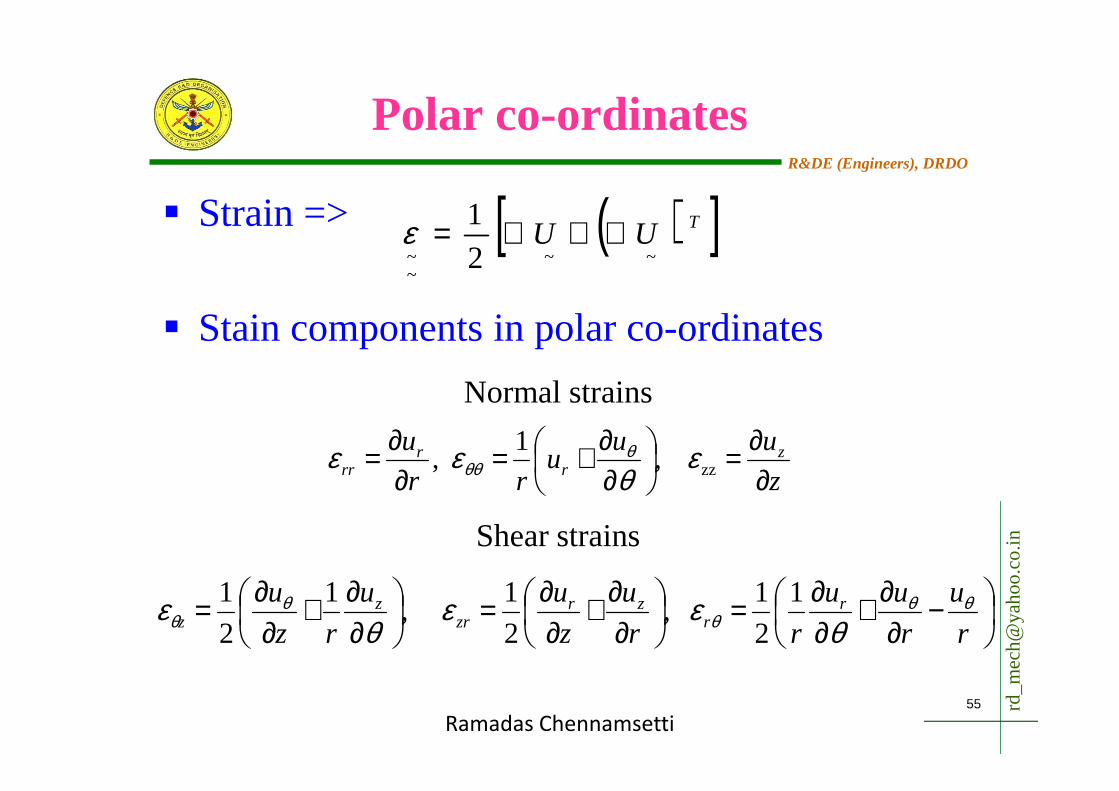
Polar co-ordinates
Strain =>
Stain components in polar co-ordinates
( )[ ]TUU
~~~~ 2
1 ∇+∇=ε
Normal strains
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
55
z
uuu
rr
u zr
rrr ∂
∂=
∂∂+=
∂∂= zz ,
1 , ε
θεε θ
θθ
−∂
∂+∂∂=
∂∂+
∂∂=
∂∂+
∂∂=
r
u
r
uu
rr
u
z
uu
rz
u rr
zrzr
zz
θθθ
θθ θ
εεθ
ε 1
2
1 ,
2
1 ,
1
2
1
Normal strains
Shear strains
R&DE (Engineers), DRDO
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
56





























