-
8/14/2019 Stochastic Modeling for Random Testing Dvcon2009 Final
9009
1/6
Sample-path Coverage: Stochastic Model Application
for Random Testing
Victor Besyakov
Tundra Semiconductor Corporation603 March Rd, Kanata, ON,
CANADA, K2K 2M5
([email protected])
Abstract This paper proposes an innovative ASIC verification
coverage method, which measures the effectiveness and
quality
of random simulations. The Sample-Path Coverage (SPC)
method is based on Design Under Test (DUT) statistical
modeling. This method is comprised of two stages: collecting
simulation statistics for multiple random tests, and using
probability metrics for similarity assessment between
corresponding runs. The benefits of SPC include optimized
computer farm usage time during ASIC verification and
increased random testing efficiency.
I. INTRODUCTIONConstrained random-based verification methodology
is the
primary tool for the verification of large ASIC designs.However,
when extensive large design verification is notfeasible, reasonable
DUT state space coverage can beachieved by using appropriate
constrained random testscenarios. In this case, the common practice
is to measureverification effectiveness by functional coverage
[1].
The widely accepted constrained random-basedverification flow
can be divided into three major steps:
Step 1: Run random test Step 2: Check the functional/code
coverage. When a
desirable coverage has been achieved, verification isdeclared
completed, (otherwise Step 3)
Step 3: Adjust the random stimulus generators by
usingconstraints and go to Step1
As it was stated at [2] Part of problem with randomtesting is
that the distribution of random events tends to followa traditional
bell-shaped curve; adding more and more randomtests does little to
guarantee that new states of the design arecovered. In fact, random
tests typically exercise the samedesign space over and over again,
with only slight variations.
Although this problem can be partially solved by
monitoring code and functional coverage, there are someissues
related to constrained random verification that cannotbe resolved
by using conventional methods. For example, thefollowing questions
related to the test duration still remainopen:
1. How long should a single random test run?2. Which type random
test is better - long or short?3. If a random test is run longer,
what is the
probability of exploring the new design states?
This paper proposes an innovative ASIC verificationcoverage
method, called Sample-path Coverage (SPC) thataddresses these
questions by measuring the effectiveness ofthe random simulations.
The idea behind SPC is to
approximate random stimulus generator outputs with anergodic
Markov Chain (MC). For a long simulation run,ergodic MC will always
converge to the unique stationarymode. This unique MC property
enables the gathering ofinformation which shows what design states
will be coveredwith higher probability and what design states will,
possibly,not be covered at all. Also, MC representation opens
upopportunities to apply probabilistic metrics that show
howstatistically close two simulations are getting to each
other.The SPC coverage information and probabilistic
similaritymetrics are then used for random tests optimization.
This article discusses similarity metrics based
onKullbackLeibler divergence. We present them along withempirical
statistical similarity criterion. With this analysis, it ispossible
to get to decide either to continue the currentsimulation or to
stop and generate a new, more effectivesimulation.
The paper is organized into the following sections:
The constrained random generator is introduced as abuffer queue
data structure probabilistic model.
Different probabilistic metrics are reviewed. Sample-path
coverage framework and usage examples
are presented.
II. SAMPLE-PATH PROBABILISTIC MODEL OF THERANDOM GENERATOR
Lets denote the output of the random generator as asequence of
system events:
, ,1 2 3,..., k E={e}=(e e e e ) .
-
8/14/2019 Stochastic Modeling for Random Testing Dvcon2009 Final
9009
2/6
Fig. 1. Markov chain
0
-1k E
n n+1
w
1. k 0 initialize system event counter
n 0 initialize system clock counter
C 0 initialize system time
2. set system eventif k has been changed e F {U}
n n+1 update clock counter
C C update system time
t D
k
w n
k
update waiting event timer(e )
if t C if waiting timer is exparied
e () execute system event
k k+1 update event counter
endif
3. goto 2
Fig. 2. Algorithm. Random generator as a dynamic probabilistic
system.
Where:
{e}- is the sample path (events trajectory) characterized byits
the cumulative distribution function F (cdf):
F {e}=P(E e) .E
ei is variable that represents an individual transaction.
U is output of generic uniform random generator.
F {U} is inverse cdf of E .-1
E C is a system clock (system sampling time).
When considering generator output as a one buffer queuedata
structure, we can define conditions for system eventexecution
as:
n w w k C t , t D(e ) .
Where tw is waiting queue time for event k.D( )
ke is the
operator that associates an individual system event
withcorresponding waiting time.
A simulation algorithm for stand-alone sample pathgenerations
can be written as it shown at Fig. 2.
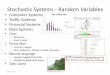
Fig. 3. Sample-path Trajectory
Fig. 4. Transition Probability Matrices for Two Simulations
(Sim1,
Sim2).
Usually, the underlying process model of a
discrete-eventstochastic system is generalized as a discrete,
irreducible,ergodic Markov chain (MC) [14], where each state emits
afixed system event (see Fig. 1. ).
The sample path of the MC is fully characterized by theinitial
states probability and by the one step transitionprobabilities
organized as a transition probability matrix:
1,1 1,2 1,3 1,n
2,1 2,2 2,3 2,n
n,1 n,1 n,n-1 n,n
P P P ... P
P P P ... PP= .
... ... ... ... ...
P P ... P P
The two figures illustrate the algorithm outcomes for
twosimulation runs using the constrained system scenariogenerator
described in [3]. Fig. 3. shows the sample-pathtrajectory, where
the system event is equal to the transactionvariable (axis Y). The
transaction variable combines into thesingle categorical
representation three transaction parameters:transaction type (read,
write... etc.), size of data payload, andtransaction destination.
The second figure (Fig. 4. ) shows acolored transition probability
matrix of the same sample-paths.
One of the MC properties that make it useful for ASICfunctional
verification is a stationary distribution (also calledan
equilibrium distribution, or invariant measure). Generally,MC with
a probability matrix P will converge in the long runsimulation to
unique vector , which satisfies the linear system[13] [8]:
-
8/14/2019 Stochastic Modeling for Random Testing Dvcon2009 Final
9009
3/6
TABLE I. MCMCDESCRIPTIVE STATISTIC
Statistics J(P1) KLR(P1) J(P2) KLR(P2) J(P1,P2) KLR(P1,P2)
Mean 0.002991 0.001495 0.003012 0.001506 1.966826 0.980818
Standard Error 1.85E-05 9.25E-06 1.73E-05 8.66E-06 0.001156
0.000588
Median 0.003001 0.001501 0.003032 0.001516 1.967595 0.980939
Mode 0.002843 0.001488 0.003116 0.001475 N/A 0.972879
Standard Deviation 0.000262 0.000131 0.000245 0.000123 0.016352
0.008314
Range 0.00139 0.000695 0.00119 0.000595 0.082082 0.043575Min
0.002378 0.001189 0.002451 0.001226 1.931369 0.961709
Max 0.003768 0.001884 0.003641 0.001821 2.013451 1.005284
=P . Stationary distribution has a direct impact on the
sample-
path behavior. After equilibrium has been achieved, for
thenon-uniform stationary distribution, the likelihood to have
anon-repeated, unique sequence of sample-path elements startsto
decline. As a result of that, the possibility of discoveringnew
design space points by continuing the same simulationrun declines
as well. Using this fact, it is possible to find theoptimal test
length and decide when to stop the currentsimulation and start the
new simulation.
III. SAMPLE-PATH PROBABILISTIC METRICSProbabilistic metrics have
been heavily studied, and
successfully applied, in several areas such as queuing
theory,finance, digital signal processing, and control
theory[9][10][11].
Among all the candidate metric functions, the Kullback-Leibler
distance (information divergence, relative entropy) isgenerating
considerable interest from a viewpoint of theMarkov process theory,
and particularly, the Hidden MarkovModels theory [6]. According to
the Kullback-Leiblermeasure, distance between two probability
functions P1(x)and P2(x) calculates as:
11 2 1
2x
P (x)KL(P ,P ) = P (x)ln .
P (x)
Kullback-Leibler distance is ideally suited as a
distribution
similarity estimator [7] for the following reasons:
The KL-distance is a generalization of standard tests
ofstatistical differences like the t-test, chi-square.
It is an example of the f-divergence [12], one among aclass of
distributional distances that include theHellinger distance and has
various geometricinvariance properties.
It has strong correlation with maximum likelihoodestimator and
therefore can be used withinoptimization process.
By definition, metric or distance (d) between twoprobability
functions P1(x) and P2(x), is required to satisfy thefollowing
conditions:
1. d(P1(x), P2(x)) 0 (non-negativity)2. d(P1(x), P2(x)) = 0 if
and only if P1(x)=P2(x)
(reflexivity)
3. d(P1(x), P2(x)) = d(P2(x), P1(x)) (symmetry)
4. d(P1(x), P3(x)) d(P1(x), P2(x)) + d(P2(x),
P3(x))(subadditivity / triangle inequality).
The Kullback-Leibler distance itself cannot be called a
realmetric between two distributions function, because it does
notsatisfy the triangle inequality and it is not symmetric
[5][6].
The triangle inequality metric violation, leads to theconclusion
that decreasing relative entropy does notnecessarily imply that two
distributions are getting closertogether. In our case, this fact
can be ignored, because theKullback-Leibler distance will not be
used as a proximitymeasure of two distributions.
The second metric violation is solved by usingsymmetrization
that combines KL(P1, P2) and KL(P2, P1)distances into the one
equation. The most popularsymmetrizations of the Kullback-Leibler
measure are:
By simple average called j-divergence [4] [5]1 2 2 1
1 2
KL(P ,P )+KL(P ,P )J(P ,P ) = .
2(1)
By the geometric mean [5]1 2 1 2 2 1G(P ,P ) = KL(P ,P )+KL(P ,P
) .
By harmonic mean called resistor average [5][6]-1 -1 -1
1 2 1 2 2 1KLR(P ,P )=(KL(P ,P ) +KL(P ,P ) ) . (2)It is also
possible to find other types of symmetrization in
literature. Some of these types may include optimizations
stepsas an example [6]:
min 1 2 1 2 2 1D (P ,P ) =min{KL(P ,P ),KL(P ,P )} . The
previously mentioned j-divergence (1) and resistor
average (2)give the best results when applied to the SPC.
Thedescriptive statistics (see TABLE I. ) gathering over
1000MonteCarlo Markov Chain (MCMC) simulations for two
distributions Sim1 (P1) and Sim2 (P2) strengthen this fact(refer
to TABLE I. Standard Error and Range). Moreover, thesame
descriptive statistics are allowed to define the empiricalbound for
KullbackLeibler similarity measures as a 0.005threshold level
(refer to TABLE I. Min, Max and Range).
IV. SAMPLE-PATH COVERAGE FRAMEWORKIn contrast to the
conventional metrics, which have
absolute meaning on the corresponding coverage space
(codecoverage, functional coverage), SPC is a relative metric.
-
8/14/2019 Stochastic Modeling for Random Testing Dvcon2009 Final
9009
4/6
Fig. 5. MCMC for in process Sample Path Coverage.
Fig. 6. Crossbar Switching Fabric DUT.
It compares different tests by using stochastic equality as
ameasure of similarity and MC as a stochastic approximation of
the simulation process. The simplified workflow algorithm forSPC
includes the following steps:
Step1: Initialization
Run the first simulation as long as possible.Suggested time
constraints for a long simulation run (if
transition probability matrix is unknown) are: maximumallowed
time for overnight regression, maximum allowed sizeof the
simulations log, or maximum allowed disc spaceutilization.
Collect statistics from the identified random generators,compute
transition probability matrix, and store it.
Step 2: Next simulations run
Run the next simulation
Fig. 7. Indirect SPC trajectory. State - number of available
input buffers,
ai- arriving events (operatorA ), di -departure events (operator
B ).
Collect the statistics on the fly and compose partialsimulation
transition matrices for defined time intervalor for certain numbers
of transactions.
Step 3: Make a comparison. All stored matrices vs.
currenttransition matrix by using Kullback-Leibler measures
Case 1: If metrics are rising above 0.005 thresholdlevel, then
run this simulation as long as it possibleand at the end of
simulation, save current transitionmatrix for the next comparison
round (Fig. 5. c).
Case 2: If the metrics are falling below the thresholdlevel (due
to the statistical equality of the twosimulations), then stop this
simulation and dismiss thecurrent transition matrix. The likelihood
for this
simulation exercising the new design states that havenot been
covered last time is low. The actualexperiment results show it is
possible to save up to60% of the machine cycles (Fig. 5. a, Fig. 5.
b).
Step 4: Repeat steps 2 to 4.
-
8/14/2019 Stochastic Modeling for Random Testing Dvcon2009 Final
9009
5/6
0
0
1. n 0 initialize system clock counter
k 0 initialize system event counter
S 0 initially no arrivals, set up queue counter
C 0 initialize system sampling time (system clock)
2. n n+1 advance to next system clo
n n+1
k
k k
1 2 k n
k n
ck
C C update system clock 3. if e () customer arrived
then k k+1 advance to the next system event
arrival, system state has been changedS A(e )
4. e {e ,e ,...,e } for all arrivals at time C
if t C
n-1 n
k
n n
- C condition for departure for all arrivals at time C
t is a sojourn time of event k
departure, system state has been changedthen S B(e )
(no concurrent departures allowed)
5. goto 2
Fig. 8. Algorithm. Generalization of the internal DUT FSM as a
dynamic probabilistic system.
V. APPLICATION OF THE SAMPLE-PATH COVERAGEMETHOD TO THE
INTRINSIC DUTFSM
Applications of SPC method include, but are not limitedto, the
assessment of testbench (TB) stimulus randomgenerator quality.
Generally speaking, all FSM like TB orDUT components (FIFO, queues,
etc) can be modeled by theMarkov process and consequently could be
treated as sample-path random generators. The following example
explains theapplication of the SPC method to the input buffer
crossbarswitching fabric-oriented design, where buffer release
processis taken as a sample-path random generator.
Assume that the DUT (Fig. 6. ) operation starts when theincoming
transaction submits a request for service to theswitching fabric
end-point. If the input end-point queue is full,the transaction
will be asked to retry until the free queueelement is available.
When the transaction is accepted by theDUT, it places the
transaction into the first available inputqueue entry. Then
transaction will be sent forward through theswitching fabric to the
appropriate end-point port. After therequest/response pair is
completed, the transaction is removedfrom the queue, freeing the
space for the next pending request.Using discrete event dynamic
system terminology, we candescribe a pair of events trajectory and
the system reaction onit, as a stochastic model (Fig. 8. ) The
model is parameterized
by:
The state change process:
n{S :n = 0,1,2...} . where n - is state space number
It represents system reaction to the to the sample pathdefined
by k system events
1 2 kE=(e ,e ,...,e ) .
And has state change process operators A(e) and B(e)
S A(e) ,S B(e) .
{Yt; t 0},the output process. It is defined by
t n n n+1Y S ;T t T . It has the same state space as Sn and it
connects the state
changes to the time which they occur
Assume that the output of the continuous time process Fig.8. is
equal to the arrival-departure event counting process.Then:
Operator
nA(e ) becomes an input buffer counterdecrement function
n+1 nA(e): S S 1 .
Operator nB(e ) becomes an input buffer counterincrement
function
n+1 nB(e): S S 1 . +
Fig. 7. shows an example of the sample path trajectory witha
queue counter as an output process.
The arrival/departure process is well approximated by
thestationary ergodic semi-Markov process for queue size equalto m
with embedded transition matrix (3) and sojourn timedistribution
function (4) specified for each state Sn. [13]
1,2 1,3 1,m
2,1 2,3 2,m
m,1 m,1 m,m-1
0 P P ... P
P 0 P ... PP= .
... ... ... ... ...
P P ... P 0
(3)
n r nF(S ;t) = P{t } .C (4)
-
8/14/2019 Stochastic Modeling for Random Testing Dvcon2009 Final
9009
6/6
nF(S ;t) is the probability that upon entering a state the
model stays there (tr is a sojourn time) for at most Cn
timeunits [14][15].
The rest of the SPC flow is still the same:
1. Run the initial MC simulation, compose and store theinitial
transition matrix.
2. Run the second simulation and compose the currenttransition
matrix.
3. Using probability metric, make a comparison: allstored
matrices with current transition matrix.
4. Save or discard the current transition matrices basedon 0.005
probabilistic metric threshold levels.
5. Run the next simulation and repeat steps 2-4.Compare to the
TB random generator, chosen intrinsic
DUT process has the following advantages:
Numbers of states for the MC transition matrices areless
compared to TB random generator. As a result ofthat, it is more
likely to achieve a stationary modeduring one simulation run.
It is correlated with both input sample-path
distributionfunction and with DUT functionality (Ref. to
thesemi-Markov process definition (3) and(4).)
It filters out simulations that have small impact on theactual
DUT functionality. Digital design has atendency to be insensitive
to the small sample-pathperturbation and what can look like a
differentsample-path behavior (metric > 0.005) at the TBrandom
generator output, can be the same in terms ofbuffer release process
(metric < 0.005).
VI. RESULTS AND CONCLUSIONSIn this paper, a new coverage metric
approach named
Sample-path Coverage (SPC) was introduced.
This method has been applied (as a post simulationprocess) for
host-bridge systems. We used two approaches toevaluate quality of
the constrained random test suit. The firstwas based on the TB
random generator as a SPC randomgenerator and the second was based
on the buffer releaseprocess (similar to one that has been
described in section I).
Both approaches show that by using SPC methods, it ispossible to
create a verification strategy, and determine:
How long we need to run single test. How to save computer farm
time and leave out the test
that exercises the same design area over and overagain. Actual
experiment results show that SPC savesup to 60% of machine cycles
compared to thetraditional approach.
ACKNOWLEDGMENTS
Special thanks to Mr. David Shleifman for his
numerousdiscussions, suggestions, and remarks and to Ms. Rhyno
forthe proofreading.
REFERENCES
[1] A promising approach to overcome the verification gap of
modern
SoCdesigns.Whitepapers.Verisityhttp://www.verisity.com/resources/whitepaper/soc_nec.html
[2] DAC 1999 Panel: Functional Verification - Real Users, Real
Problems,Real Opportunities
[3] Victor Besyakov, David Shleifman Constrained Random
TestEnvironment for SoC Verification using VERA SNUG 2002
Boston.
[4]
Fuglede, B. Topsoe, F. Jensen-Shannon divergence and Hilbert
spaceembedding
[5] D. H. Johnson and S. Sinanovic. Symmetrizing the
Kullback-Leiblerdistance. IEEE Transactions on Information Theory,
2001.
[6] Hershey, J.R. Olsen, P.A. Rennie, S.J. Variational
Kullback-Leiblerdivergence for Hidden Markov modelsAutomatic Speech
Recognition& Understanding, 2007. ASRU.
[7] Tamraparni Dasu, Shankar Krishnan, Suresh
Venkatasubramanian, andKe Yi An Information-Theoretic Approach to
Detecting Changes inMulti-Dimensional Data Streams 38th Symposium
on the Interface ofStatistics, Computing Science, and Applications
(Interface '06),Pasadena, CA, May, 2006.
[8] Edited by Michiel Hazewinkel Encyclopaedia of
Mathematics.http://eom.springer.de/s/s087260.htm
[9] S T. Rachev Probability Metrics and the Stability of
Stochastic Models.John Wiley and Sons, Chichester, 1991.
[10] S.T. Rachev, F. J. Fabozzi, S.V. Stoyanov The Ideal
Risk,Uncertainty, and Performance Measures John Wiley & Sons,
2008
[11] Steeb. Hackensack Mathematical tools in signal processing
with C++& Java simulations Willis-Hans, NJ, World Scientific,
2005.
[12] F-divergence Wikipedia, the free
encyclopediahttp://en.wikipedia.org/wiki/F-divergence
[13] Rubinstein, Reuven Y., Kroese, Dirk P. The Cross-Entropy
Method AUnified Approach to Combinatorial Optimization,
Monte-CarloSimulation and Machine Learning Springer-Verlag New
York, LLC,2004.
[14] Markov chain Wikipedia, the free
encyclopediahttp://en.wikipedia.org/wiki/Markov_chain
[15] Edited by Michiel Hazewinkel Encyclopaedia of
Mathematics.http://eom.springer.de/S/s084220.htm