-
8/10/2019 Stochastic Cram er-Rao Bound Analysis for DOA
Estimation in Spherical Harmonics Domain
1/5
IEEE SIGNAL PROCESSING LETTERS 1
Stochastic Cramer-Rao Bound Analysis for DOA
Estimation in Spherical Harmonics DomainLalan Kumar, Student
Member, IEEE, and Rajesh M Hegde, Member, IEEE
AbstractCramer-Rao bound (CRB) has been formulated inearlier
work for linear, planar and 3-D array configurations.
Theformulations developed in prior work, make use of the
standardspatial data model. In this paper, the existence of CRB for
thespherical harmonics data model is first verified. Subsequently,
anexpression for stochastic CRB is derived for direction of
arrival(DOA) estimation in spherical harmonics domain. The
stochasticCRBs for azimuth and elevation are plotted at various
Signalto Noise Ratios (SNRs) and snapshots. It is noted that a
lowerbound on the CRB is attained at high SNR. A similar
observationis made when larger number of snapshots are used.
Index TermsCramer-Rao bound, Spherical microphone ar-
ray, Spherical harmonics
I. INTRODUCTION
After the introduction of higher order spherical microphone
array and associated signal processing in [1, 2], the
spherical
microphone array is widely being used for direction of
arrival
(DOA) estimation and tracking of acoustic sources [39]. This
is primarily because of the relative ease with which array
processing can be performed in spherical harmonics (SH)
domain without any spatial ambiguity. Cramer-Rao bound
(CRB) places a lower bound on the variance of a unbiased
estimator. It provides a benchmark against which any
estimator
is evaluated. Hence, it is of sufficient interest to develop
an expression for Cramer-Rao bound in spherical
harmonicsdomain.
In [10], CRB expression was derived for the case of uniform
linear array (ULA) but without using the theory of CRB. This
is addressed in [11], which provides a textbook derivation
for stochastic CRB. Explicit CRBs of azimuth and elevation
are developed in [12, 13] for planar arrays. CRB analysis is
presented for near-field source localization in [14, 15]
using
ULA and UCA (Uniform Circular Array) respectively. In
[16], closed-form CRB expressions has been derived for 3-
D array made from ULA branches. However, to the best
of authors knowledge, closed-form expression for CRB in
spherical harmonics domain is not available in literature.
In
this paper, an expression for stochastic CRB for spherical
arrayis derived in spherical harmonics domain.
This work was funded in part by TCS Research Scholarship
Programunder project number TCS/CS/20110191 and in part by DST
projectEE/SERB/20130277.
c2014 IEEE. Personal use of this material is permitted. However,
permis-sion to use this material for any other purposes must be
obtained from theIEEE by sending a request to
[email protected].
Lalan Kumar and Rajesh M. Hegde are with the Departmentof
Electrical Engineering, Indian Institute of Technology, Kanpur,
e-mail:{lalank,rhegde}@iitk.ac.in
Color versions of one or more of the figures in this paper are
availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier xxxxx
The rest of the paper is organized as follows. In Section
II, we present the signal processing in spherical harmonics
domain. In Section III, formulation of CRB is given in
detail.
In Section IV, a simulation is presented showing the
behavior
of CRB at various SNRs and snapshots. This is followed by
conclusion and future scope in Section V.
I I . DECOMPOSITION OFC OMPLEX P RESSURE IN
SPHERICAL H ARMONICSDOMAIN
We consider a spherical microphone array with I identical
and omnidirectional microphones, mounted on the surface ofa
sphere with radius r. The position vector ofith microphone
is given by ri = (r sin icos i, r sin isin i, r cos i)T,
where (.)T denotes the transpose. The elevation angle ismeasured
down from positive z axis, while the azimuthal
angle is measured counterclockwise from positive x axis.
Let i (i, i) denotes the angular location of theith microphone.
A narrowband sound field of L plane-
waves is incident on the array with wavenumber k. The
wavevector corresponding to lth planewave is given by kl =(k sin
lcos l, k sin lsin l, k cos l)T. The direction of ar-rival of the
lth source is denoted by l (l, l).
The instantaneous pressure amplitude at theith microphone,
can be expressed as [17]
pi(; t) =Ll=1
slt i(l)
+ni(t) (1)
where t = 1, 2, , Ns, with Ns being the snapshots andi(l) is the
propagation delay between the reference micro-phone and ith
microphone for the lth source impinging from
direction l. ni is uncorrelated sensor noise component. It
is to be noted that the microphone gain for far-field
sources
is taken to be unity. Utilizing the identity slt i(l)
=
ejkT
l risl(t) for narrowband assumption, the Equation 1 can
be rewritten as
pi(; t) =Ll=1
vi(l, k)sl(t) +ni(t) (2)
where vi(l, k) = ejkT
l ri , is referred as steering vector
component corresponding to the ith microphone response for
lth source. Rewriting the Equation 2 in matrix form, we have
p(; t) =V(, k)s(t) + n(t). (3)
Taking appropriate Fourier co-efficients of Equation 3, the
spatial data model in frequency domain can be written as
p(; ) = V(, k)s() + n() (4)
-
8/10/2019 Stochastic Cram er-Rao Bound Analysis for DOA
Estimation in Spherical Harmonics Domain
2/5
2 IEEE SIGNAL PROCESSING LETTERS
whereis FFT index, V is ILsteering matrix,s is LNssignal matrix
and n is I Ns matrix of uncorrelated sensornoise. The noise
components are assumed to be circularly
Gaussian distributed with zero mean and covariance matrix
2I, I being the identity matrix. The steering matrix V(, k)is
expressed as
V(, k) = [v1,v2, . . . ,vL], where (5)
vl= [ejkTl r1 , ejkTl r2 , . . . , ejkTl rI ]T (6)
wherej is the unit imaginary number. Theith term in Equation
6 refers to pressure due to l th unit amplitude planewave
with
wavevector kl at locationri. This may alternatively be
written
as [18]
ejkT
l ri =
n=0
nm=n
bn(kr)[Ymn (l)]
Ymn (i) (7)
where bn(kr) is called mode strength.The far-field mode strength
bn(kr) for open sphere (virtual
sphere) and rigid sphere is given by
bn(kr) = 4jnjn(kr), for open sphere (8)
= 4jnjn(kr)
jn(kr)
hn(kr)hn(kr)
, rigid sphere (9)
wherejn(kr)is spherical Bessel function of first kind, hn(kr)is
spherical Hankel function of first kind and refers to first
derivative. The extra term in far-field mode strength for
rigid
sphere accounts for scattered pressure from the surface of
the
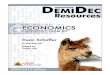
sphere [19, p. 228]. Figure 1 illustrates mode strength bn
as
a function of kr and n for a open sphere. For kr = 0.1,zeroth
order mode amplitude is22 dB, while the first order hasamplitude 8
dB. Hence, for order greater than kr, the modestrengthbn decreases
significantly. Therefore, the summation
in Equation 7 can be truncated to finite N, called the
arrayorder.
101
100
101
120
100
80
60
40
20
0
20
40
kr
bn
(kr)in
dB
n=0
n=4
n=3
n=2
n=1
Fig. 1. Variation of mode strength bn in dB as a function ofkr
andn foran open sphere.
The spherical harmonic of order n and degree m, Ymn ()is given
by
Ymn () =
(2n+ 1)(nm)!
4(n+m)! Pmn (cos)e
jm (10)
0 n N,n m n
Ymn are solution to the Helmholtz equation [20] and Pmn are
associated Legendre functions. For negative m, Ymn () =
(1)|m|Y|m|n (). The spherical harmonics are used for
spherical harmonics decomposition of a square integrable
function, similar to complex exponentialejt used for decom-
position of real periodic functions.
Substituting Equations 6 and 7 in Equation 5, we have the
expression for steering matrix as
V(, k) =Y()B(kr)YH() (11)
where Y() is I (N+ 1)2 matrix whose ith row is given
as
y(i) = [Y00(i), Y
11 (i), Y
01(i), Y
11(i), . . . , Y
NN(i)].
(12)
The L (N+ 1)2 matrixY() can be expanded on similarlines. The (N+
1)2 (N+ 1)2 matrix B(kr) is given by
B(kr) =diagb0(kr), b1(kr), b1(kr), b1(kr), . . . , bN(kr)
.
(13)
Having introduced the spherical harmonics, the spherical
harmonics decomposition of the received pressure p(; ), isgiven
as [21]
pnm() = 20
0
p(; )[Ymn ()] sin()dd
=I
i=1
aipi(; )[Ynm(i)] (14)
where pnm() are spherical Fourier co-efficients. The
spatialsampling of pressure over a spherical microphone array is
cap-
tured using sampling weights, ai [22]. Rewriting the
Equation
14 in matrix form, we have
pnm(; ) = YH()p(; ) (15)
where pnm(; ) = [p00, p1(1), p10, p11, . . . , pNN]T and
= diag(a1, a2, , aI). Also, under the assumption ofEquation 14,
following orthogonality property of spherical
harmonics holds
YH()Y() =I, (16)
where I is(N+ 1)2 (N+ 1)2 identity matrix. SubstitutingEquation
11 in 4, then multiplying both side with YH()and utilizing
relations 15,16, we have data model in spherical
harmonics domain as
pnm(; ) =B(kr)YH()s() + nnm() (17)
Multiplying both side of Equation 17 by B
1
(kr), the finalspherical harmonics data model is given by
anm(; ) = YH()s() + znm() (18)
[anm](N+1)2Ns = [YH](N+1)2L[s]LNs+ [znm](N+1)2Ns
(19)
where
znm() = B1(kr)nnm() =n() (20)
and, = B1(kr)YH() (21)
It must be noted that is known for a given array geometry.
-
8/10/2019 Stochastic Cram er-Rao Bound Analysis for DOA
Estimation in Spherical Harmonics Domain
3/5
-
8/10/2019 Stochastic Cram er-Rao Bound Analysis for DOA
Estimation in Spherical Harmonics Domain
4/5
4 IEEE SIGNAL PROCESSING LETTERS
0 2.5 5 7.5 10 12.5 15 17.5 200
1
2
3
4
5x 10
3
SNR(dB)
CRB
CRB()
CRB()
(a)
50 75 100 125 150 175 200 225 250 275 3000
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
4
Snapshots
CRB
CRB()
CRB()
(b)
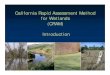
Fig. 2. Variation of CRB for elevation () and azimuth ()
estimation (a) at various SNR with 300 snapshots, (b) with varying
snapshots at SNR 20dB.Source is located at (20, 50).
of Equation 37 in Equation 34, the FIM elements can now be
written as
Fr,s = 2Retr(x) +tr(y)
= 2Re
tr(YHsRsYR
1a YHRs YrR
1a
)
+tr(YHsRsYR1aYHrRsYR
1a )
(38)
Utilizing the relations in Equation 30-31,
Fr,s = 2Retr(YHeseTsRsYR1a YHRsereTr YR1a )+tr(YHese
TsRsYR
1aYH ere
TrRsYR
1a )
= 2Re
eTsRsYR
1a YHRsere
Tr YR
1aYHes
+eTsRsYR1aYH ere
TrRsYR
1aYHes
(39)
Hence the FIM can finally be written as
F = 2Re
(RsYR1a YHRs)
T (YR1aYH)
+(RsYR1aYH )
T (RsYR1aYH)
(40)
where denotes Hadamard product. The Hadamard productof two
matrix are defined as
(X Z)rs (X)rs(Z)rs. (41)
Similar to Equation 40, the other block of FIM with only one
parameter vector, F can be written as
F = 2Re
(RsYR1a YHRs)
T (YR1aYH )
+(RsYR1aYH )
T (RsYR1aYH )
. (42)
F and F can be expressed in the similar way. The Fisher
Information matrix is finally given by
F =
F FF F
.
Now the closed-form CRB can be computed using Equation
27. IV. SIMULATION R ESULTS
Simulation results are presented in this section to observe
the behavior of the stochastic CRB at various SNRs and
snapshots. An Eigenmike microphone array [26] was used
for this purpose. It consists of 32 microphones embedded
in a rigid sphere of radius 4.2 cm. The order of the array
was taken to be N = 3. The signal and noise are takento be
Gaussian distributed with zero mean. A source with
DOA(20, 50) is considered in this simulation. Two sets
ofexperiments were conducted with 500 independent trials. Inthe
first set, experiments were conducted for 300 snapshots,
at various SNRs. In the second set of experiments, CRB was
computed for various snapshots at SNR of20dB. The CRBfor azimuth
and elevation is plotted in Figure 2.
V. CONCLUSION ANDF UTURE S COPE
Stochastic Cramer-Rao bound analysis for azimuth and
elevation estimation of far-field sources is presented using
a spherical microphone array. The spherical harmonics data
model is used for this purpose. The Cramer-Rao bound is
derived by direct application of the CRB theory. The CRB
forfar-field azimuth and elevation estimation is also
illustrated
at various SNRs and snapshots. CRB for range and bearing
estimation of near-field source using spherical harmonics is
currently being developed. Non-matrix closed-form expression
for conditional and unconditional data model will also be
addressed in future work.
APPENDIX
COMPUTING THED ERIVATIVE OFS PHERICAL H ARMONICS
In this Appendix, we detail the steps involved in the
computation of the derivative ofYnm. From Equations 10 and
12, the vector derivative Y can be found using
Ymn (s)s
=jmYmn (s). (43)
Computing Y involves differentiation of the associated Leg-endre
function. The derivative of associated Legendre polyno-
mial can be expressed as [27]
Pmn (z)
z =
1
z2 1[znPmn (z) (m+n)P
mn1(z)] (44)
For z = cos , the derivative becomes
Pmn (cos )
=
1
sin [n cos Pmn (cos )(m+n)P
mn1(cos )].
(45)
Utilizing the property of Legendre polynomial, the Equation
45 can be rewritten as
Pmn (cos )
= 1
sin [(nm+ 1)Pmn+1(cos ) (n+ 1) cosP
mn (cos )].
(46)
Now, Y can be computed by using the following equation.
Ymn (r)
r=
(2n+ 1)(nm)!
4(n+m)! ejmr
1
sin r
.[(nm+ 1)Pmn+1(cos r) (n+ 1) cos rPmn (cos r)] (47)
-
8/10/2019 Stochastic Cram er-Rao Bound Analysis for DOA
Estimation in Spherical Harmonics Domain
5/5
KUMAR & HEGDE : STOCHASTIC CRAME R-R AO BOUND ANALYSI S FOR
DOA E STI MAT ION I N S PHERI CAL HARM ONIC S DOM AI N 5
REFERENCES
[1] T. D. Abhayapala and D. B. Ward, Theory and design
of high order sound field microphones using spherical
microphone array, in Acoustics, Speech, and Signal Pro-
cessing (ICASSP), 2002 IEEE International Conference
on, vol. 2. IEEE, 2002, pp. II1949.
[2] J. Meyer and G. Elko, A highly scalable spherical mi-
crophone array based on an orthonormal decompositionof the
soundfield, in Acoustics, Speech, and Signal Pro-
cessing (ICASSP), 2002 IEEE International Conference
on, vol. 2. IEEE, 2002, pp. II1781.
[3] L. Kumar, K. Singhal, and R. M. Hegde, Near-field
source localization using spherical microphone array,
in Hands-free Speech Communication and Microphone
Arrays (HSCMA), 2014 4th Joint Workshop on, May
2014, pp. 8286.
[4] , Robust source localization and tracking using
MUSIC-Group delay spectrum over spherical arrays,
in Computational Advances in Multi-Sensor Adaptive
Processing (CAMSAP), 2013 IEEE 5th International
Workshop on. IEEE, 2013, pp. 304307.[5] X. Li, S. Yan, X. Ma,
and C. Hou, Spherical harmonics
MUSIC versus conventional MUSIC,Applied Acoustics,
vol. 72, no. 9, pp. 646652, 2011.
[6] H. Sun, H. Teutsch, E. Mabande, and W. Kellermann,
Robust localization of multiple sources in reverberant
environments using EB-ESPRIT with spherical micro-
phone arrays, in Acoustics, Speech and Signal Process-
ing (ICASSP), 2011 IEEE International Conference on.
IEEE, 2011, pp. 117120.
[7] D. Khaykin and B. Rafaely, Acoustic analysis by
spherical microphone array processing of room impulse
responses, The Journal of the Acoustical Society of
America, vol. 132, p. 261, 2012.
[8] R. Goossens and H. Rogier, Closed-form 2D angle
estimation with a spherical array via spherical phase
mode excitation and ESPRIT, in Acoustics, Speech and
Signal Processing, 2008. ICASSP 2008. IEEE Interna-
tional Conference on. IEEE, 2008, pp. 23212324.
[9] J. McDonough, K. Kumatani, T. Arakawa, K. Yamamoto,
and B. Raj, Speaker tracking with spherical micro-
phone arrays, in Acoustics, Speech and Signal Process-
ing (ICASSP), 2013 IEEE International Conference on.
IEEE, 2013, pp. 39813985.
[10] P. Stoica and N. Arye, MUSIC, maximum likelihood,
and Cramer-Rao bound, Acoustics, Speech and SignalProcessing,
IEEE Transactions on, vol. 37, no. 5, pp.
720741, 1989.
[11] P. Stoica, E. G. Larsson, and A. B. Gershman, The
stochastic CRB for array processing: a textbook deriva-
tion, Signal Processing Letters, IEEE, vol. 8, no. 5, pp.
148150, 2001.
[12] H. Gazzah and S. Marcos, Cramer-Rao bounds for
antenna array design, Signal Processing, IEEE Trans-
actions on, vol. 54, no. 1, pp. 336345, 2006.
[13] T. Filik and T. E. Tuncer, Design and evaluation of V-
shaped arrays for 2-D DOA estimation, in Acoustics,
Speech and Signal Processing, 2008. ICASSP 2008. IEEE
International Conference on. IEEE, 2008, pp. 2477
2480.[14] A. Weiss and B. Friedlander, Range and bearing
esti-
mation using polynomial rooting, Oceanic Engineering,
IEEE Journal of, vol. 18, no. 2, pp. 130137, 1993.
[15] J.-P. Delmas and H. Gazzah, CRB analysis of near-
field source localization using uniform circular arrays,
in Acoustics, Speech and Signal Processing (ICASSP),
2013 IEEE International Conference on. IEEE, 2013,
pp. 39964000.
[16] D. T. Vu, A. Renaux, R. Boyer, and S. Marcos, A
Cramer Rao bounds based analysis of 3D antenna array
geometries made from ULA branches,Multidimensional
Systems and Signal Processing, vol. 24, no. 1, pp. 121
155, 2013.[17] R. Roy and T. Kailath, ESPRIT-estimation of
signal pa-
rameters via rotational invariance techniques, Acoustics,
Speech and Signal Processing, IEEE Transactions on,
vol. 37, no. 7, pp. 984995, 1989.
[18] B. Rafaely, Plane-wave decomposition of the sound field
on a sphere by spherical convolution,The Journal of the
Acoustical Society of America, vol. 116, no. 4, pp. 2149
2157, 2004.
[19] E. G. Williams, Fourier acoustics: sound radiation and
nearfield acoustical holography. academic press, 1999.
[20] ,Fourier acoustics: sound radiation and nearfield
acoustical holography. Access Online via Elsevier,
1999.[21] J. R. Driscoll and D. M. Healy, Computing Fourier
transforms and convolutions on the 2-sphere, Advances
in applied mathematics, vol. 15, no. 2, pp. 202250,
1994.
[22] B. Rafaely, Analysis and design of spherical microphone
arrays, Speech and Audio Processing, IEEE Transac-
tions on, vol. 13, no. 1, pp. 135143, 2005.
[23] D. Tse and P. Viswanath, Fundamentals of wireless
communication. Cambridge university press, 2005.
[24] S. M. Kay, Fundamentals of statistical signal
processing,
volume i: Estimation theory (v. 1), 1993.
[25] P. Stoica and R. L. Moses, Spectral analysis of
signals.
Pearson/Prentice Hall Upper Saddle River, NJ, 2005.[26] The
Eigenmike Microphone Array,
http://www.mhacoustics.com/.
[27] M. Abramowitz and I. A. Stegun, Handbook of mathe-
matical functions: with formulas, graphs, and mathemat-
ical tables. Courier Dover Publications, 2012.