Embed Size (px)
Citation preview

European Journal of Operational Research 240 (2015) 425–430
Contents lists available at ScienceDirect
European Journal of Operational Research
journal homepage: www.elsevier .com/locate /e jor
Stochastics and Statistics
Stochastic comparisons of residual lifetimes and inactivity timesof coherent systems with dependent identically distributed components
http://dx.doi.org/10.1016/j.ejor.2014.07.0180377-2217/� 2014 Elsevier B.V. All rights reserved.
⇑ Corresponding author.E-mail addresses: [email protected] (N. Gupta), [email protected]
(N. Misra), [email protected] (S. Kumar).
Nitin Gupta a,⇑, Neeraj Misra b, Somesh Kumar a
a Department of Mathematics, Indian Institute of Technology Kharagpur, Kharagpur 721302, Indiab Department of Mathematics and Statistics, Indian Institute of Technology Kanpur, Kanpur 208016, India
a r t i c l e i n f o a b s t r a c t
Article history:Received 13 September 2013Accepted 17 July 2014Available online 27 July 2014
Keywords:Applied probabilityCoherent systemsReliabilityResidual life timesStochastic ordering
In this paper we compare the residual lifetime of a used coherent system of age t > 0 with the lifetime ofthe similar coherent system made up of used components of age t. Here ‘similar’ means that the systemhas the same structure and the component lifetimes have the same dependence (joint reliability copula).Some comparison results are obtained for the likelihood ratio order, failure rate order, reversed failurerate order and the usual stochastic order. Similar results are reported for comparing inactivity time ofa coherent system with lifetime of similar coherent system having component lifetimes same as inactiv-ity times of failed components.
� 2014 Elsevier B.V. All rights reserved.
1. Introduction
Study of coherent systems plays a relevant role in the field ofreliability and survival analysis. A particular case of coherent sys-tem is an r-out-of-n system, i.e., a system which functions if, andonly if, at least r out of the n components of the system function.Further the series and parallel systems are n-out-of-n and 1-out-of-n systems, respectively. The reader may refer to Barlow andProschan (1981) for a detailed study of coherent systems. In manypractical situations it may be of interest to compare the residuallifetime TS ¼ ðTðXÞ � tjTðXÞ > tÞ of a used coherent system of aget > 0 with the lifetime TC ¼ TðYÞ of the similar coherent systemmade up of used components of age t; here X ¼ ðX1; . . . ;XnÞ;Y ¼ ðY1; . . . ; YnÞ; TðXÞ is the lifetime of the new system andYi ¼ ðXi � tjXi > tÞ; i ¼ 1; . . . ;n are residual lifetimes of used com-ponents. Here ‘similar’ means that the system has the same struc-ture and the lifetimes X and Y have the same joint reliabilitycopula. Note that TC is different from ðTðXÞ � tjX1 > t; . . . ;Xn > tÞ.
Consider a random variable X having the Lebesgue probabilitydensity function f ðxÞ; x 2 R ¼ ð�1;1Þ, the distribution functionFðxÞ ¼ PðX 6 xÞ; x 2 R, and the reliability/survival functionFðxÞ ¼ 1� FðxÞ ¼ PðX > xÞ; x 2 R. Further suppose that Fð0Þ ¼ 0
and fx 2 R : f ðxÞ > 0g ¼ ð0;1Þ. Let gf ðxÞ ¼ �f 0ðxÞ=f ðxÞ; x 2 ð0;1Þbe the corresponding eta function (cf. Glaser, 2001). The residuallife time at a age/time t P 0 is denoted by Xt ¼ X � tjX > tð Þ, andthe inactivity time of X at time t P 0 is denoted byXðtÞ ¼ t � XjX 6 tð Þ. The aging properties and the stochastic com-parison results of the residual life time and the inactivity timeare extensively studied in the literature, see for example Block,Savits, and Singh (1998), Chandra and Roy (2001), Ross (1996), Liand Lu (2003), Li and Zuo (2004), Misra, Gupta, and Dhariyal(2008), Pellerey and Petakos (2002), Zhang and Li (2003),Eryilmaz (2012) and Si, Wang, Hu, and Zhou (2011). Also for thestudy of the eta functions one may refer to Glaser (2001). Through-out this paper the terms increasing/decreasing will be used fornon-decreasing/non-increasing. Some definitions which may befound in Shaked and Shanthikumar (2007) are presented belowfor the sake of completeness in presentation.
Definition 1. Let Z1 and Z2 be two random variables with Lebesgueprobability density functions f1ð�Þ and f2ð�Þ, distribution functionsF1ð�Þ and F2ð�Þ, and reliability functions F1ð�Þ ¼ 1� F1ð�Þ andF2ð�Þ ¼ 1� F2ð�Þ, respectively. Suppose that Fið0Þ ¼ 0, andfx 2 R : fiðxÞ > 0g ¼ ð0;1Þ; i ¼ 1;2. Let Z1 and Z2 have the failurerate functions rZ1 ðxÞ ¼ f1ðxÞ=F1ðxÞ and rZ2 ðxÞ ¼ f2ðxÞ=F2ðxÞ; x2 ð0;1Þ, reversed failure rate functions ~rZ1 ðxÞ ¼ f1ðxÞ=F1ðxÞ and~rZ2 ðxÞ ¼ f2ðxÞ=F2ðxÞ; x 2 ð0;1Þ, and the eta functionsgf1ðxÞ ¼ �f 01ðxÞ=f1ðxÞ and gf2
ðxÞ ¼ �f 02ðxÞ=f2ðxÞ; x 2 ð0;1Þ, respec-tively. Then Z1 is said to be smaller than Z2 in the

426 N. Gupta et al. / European Journal of Operational Research 240 (2015) 425–430
(a) likelihood ratio (lr) order ðZ1 6lr Z2Þ if f2ðxÞ=f1ðxÞ increases inx on ð0;1Þ;
(b) failure rate (fr) order ðZ1 6fr Z2Þ if rZ1 ðxÞP rZ2 ðxÞ; 8x2 ð0;1Þ;
(c) reversed failure rate (rfr) order ðZ1 6rfr Z2Þ if~rZ1 ðxÞ 6 ~rZ2 ðxÞ; 8x 2 ð0;1Þ;
(d) usual stochastic (st) order (Z1 6st Z2) if F1ðxÞ 6 F2ðxÞ, for allx 2 ð0;1Þ.
The following equivalences are easy to verify:
Z1 6lr Z2 () lnf2ðxÞf1ðxÞ
� �is increasing in x 2 ð0;1Þ;
() gf1ðxÞP gf2
ðxÞ; 8x > 0;
() F2 F�11 ðpÞ
� �is concave on ð0;1Þ;
() F1 F�12 ðpÞ
� �is convex on ð0;1Þ;
() F2 F�11 ðpÞ
� �is convex on ð0;1Þ;
() F1 F�12 ðpÞ
� �is concave on ð0;1Þ; ð1:1Þ
Z1 6fr Z2 ()F2 F�1
1 ðpÞð Þp is decreasing on ð0;1Þ () F1 F�1
2 ðpÞð Þp is
increasing on (0,1);Z1 6rfr Z2 ()
F2 F�11 ðpÞð Þp is increasing on ð0;1Þ () F1 F�1
2 ðpÞð Þp is
decreasing on (0,1).The following implications are also well known:
Z1 6lr Z2 ) Z1 6fr Z2 ) Z1 6st Z2;
Z1 6lr Z2 ) Z1 6rfr Z2 ) Z1 6st Z2:
For these and other equivalences/implications, we refer the readerto Shaked and Shanthikumar (2007).
For independently and identically distributed (IID) components,Zhang and Li (2003) proved that the lifetime of a parallel/seriessystem having used/inactive components stochastically dominatesthe lifetime of a used/inactive parallel/series system, in the usualstochastic ordering. The results of Zhang and Li (2003) arestrengthened by Li and Lu (2003) to the likelihood ratio ordering.Further Gupta (2013) strengthened the results of Li and Lu(2003) by proving that the lifetime of an r-out-of-n system havingused components stochastically dominates the lifetime of a used r-out-of-n system, in the likelihood ratio ordering. In fact Gupta(2013) finds out the conditions on the structure function underwhich a coherent system having used/inactive componentsstochastically dominates the lifetime of a used/inactive coherentsystem, in the likelihood ratio ordering.
Recently some studies have been carried out for coherentsystems having dependent components. Navarro, Pellerey, andDi Crescenzo (2015) studied stochastic comparisons betweencoherent systems having randomized dependent components.Also Gupta and Kumar (2014) have investigated stochastic com-parisons of component and system redundancies with dependentcomponents.
Considering that components are identically distributed (ID)and that may be dependent, in Section 2, we provide necessaryand sufficient conditions on the system reliability functions so thatthe lifetime of coherent system having used components performbetter/worse than the lifetime of used coherent system, under var-ious stochastic orderings. The result derived in this paper can alsobe applied to coherent systems with IID components (see forexample Navarro & Rychlik, 2010; Navarro & Spizzichino, 2010).The approach used in this paper unifies the results of Zhang andLi (2003), Li and Lu (2003) and Gupta (2013). Applications ofderived results are illustrated through various examples.
2. Stochastic ordering of residual life times
Consider a coherent system comprising of n identical compo-nents C1; . . . ;Cn having random lifetimes X1; . . . ;Xn, respectively,that are identically distributed but may be dependent. Let thecoherent system have the structure function /. Also let the life-times of these n components have the common probability densityfunction f ð�Þ, the common distribution function Fð�Þ and the com-mon reliability function Fð�Þ ¼ 1� Fð�Þ, where Fð0Þ ¼ 0 andfx 2 R : f ðxÞ > 0g ¼ ð0;1Þ. Then the joint reliability function ofX1; . . . ;Xnð Þ is
Gðx1; . . . ; xnÞ ¼ P X1 > x1; . . . ;Xn > xnð Þ ¼ KðFðx1Þ; . . . ; FðxnÞÞ; ð2:1Þ
where K is a multivariate distribution function with support 0;1½ Þn
and has uniform marginals on ½0;1�. In the literature, K is called areliability copula (see Nelsen, 2006), and the representation (2.1)of the reliability copula is well-known as Sklar’s copularepresentation.
The lifetime of coherent system / is denoted bysðXÞ ¼ s X1; . . . ;Xnð Þ and its reliability function as
GTðxÞ ¼ P sðXÞ > xð Þ; x 2 R:
A function h : ½0;1� ! ½0;1� is called a distorted (or distortion) func-tion if h is continuous, increasing, hð0Þ ¼ 0 and hð1Þ ¼ 1. Note that ifF is a reliability function and h is a distorted function then hðFðxÞÞdefines a reliability function. In that case hðFðxÞÞ is called the dis-torted reliability function. Distorted distributions/functions findapplications in various diversified fields such as insurance, pricing,financial risk management etc. One may refer to Denneberg(1990), Quiggin (1982), Sordo and Suarez–Liorens (2011), Wang(1995, 1996), Wang and Young (1998) and Yarri (1987) for detailsof distorted distributions/functions and their applications.
The following lemma provides an useful representation for sys-tem reliability function GTðxÞ as a distorted function of the com-mon reliability function FðxÞ:
Lemma 1 (Navarro, del Águila, Sordo, and Suárez-liorens,2012). Let sðXÞ be the lifetime of a coherent system with IDcomponent lifetimes X1; . . . ;Xn having the joint reliability copulaKð�Þ and the common reliability function Fð�Þ. Then the systemreliability function can be written as
GTðxÞ ¼ h FðxÞ� �
;
where h is a distorted function that depends only on the structure func-tion / and the reliability copula K.
For a fixed t > 0, the residual life of the coherent system havingID components X1; . . . ;Xn may be denoted by
sðXÞð Þt ¼ sðXÞ � tjsðXÞ > tð Þ ¼ s X1; . . . ;Xnð Þð Þt :
Then the resulting used coherent system (having the lifetimesðXÞð Þt) has the system reliability function
GTS ðxÞ ¼ P sðXÞð Þt > x� �
¼ hðFðt þ xÞÞhðFðtÞÞ
; x > 0; ð2:2Þ
which is a distorted reliability function obtained from reliabilityfunction FtðxÞ ¼ Fðt þ xÞ=FðtÞ with distorted functionhTS ðpÞ ¼ hðqpÞ=hðqÞ, where q ¼ FðtÞ.
For a fixed t > 0, let Yi ¼ ðXi � tjXi > tÞ; i ¼ 1; . . . ;n and letXt ¼ Y1; . . . ;Ynð Þ and X ¼ ðX1; . . . ;XnÞ have the same copula. Thenthe lifetime of a coherent system having lifetimes Y1; . . . ;Yn andstructure / may be denoted by s Xtð Þ. The resulting coherent sys-tem having used ID components has the system reliability function
GTC ðxÞ ¼ P s Xtð Þ > xð Þ ¼ hFðt þ xÞ
FðtÞ
!; x > 0; ð2:3Þ

N. Gupta et al. / European Journal of Operational Research 240 (2015) 425–430 427
and is the distorted reliability function obtained from reliabilityfunction FtðxÞ ¼ Fðt þ xÞ=FðtÞ with distorted function hTC ðpÞ ¼ hðpÞ.
In this paper we investigate conditions under which
sðXÞð Þt 6� P�ð Þs Xtð Þ; for a fixed ðor allÞ t > 0; ð2:4Þ
holds under various stochastic orders �. We will provide variousresults in this direction. The proofs of these results are given inthe Appendix. The following theorem provides conditions underwhich (2.4) holds for the likelihood ratio ordering (i.e., conditionsunder which a coherent system of used ID components performsbetter/worse than a used coherent system having ID components,in the likelihood ratio ordering).
Theorem 1. Under the above notation assume that Xt and X have thesame reliability copula. Then sðXÞð Þt 6lr Plrð Þs Xtð Þ holds for a fixedt > 0 (for all t > 0) if and only if, one of the following equivalentconditions hold:
(a) h qh�1ðpÞ� �
is convex (concave) in p 2 ð0;1Þ for q ¼ FðtÞ (for allq 2 ð0;1ÞÞ;
(b) h h�1ðpqÞh�1ðqÞ
� �is concave (convex) in p 2 ð0;1Þ for q ¼ FðtÞ (for all
q 2 ð0;1Þ);(c) h0 p=qð Þ=h0 pð Þ is a decreasing (increasing) in p 2 ð0;1Þ for
q ¼ FðtÞ (for all q 2 ð0;1Þ);(d) h00 pð Þ
h0 pð Þ P ð6Þ h00 pqð Þ
qh0 pqð Þ ; 80 < p < q < 1 and q ¼ FðtÞ (for all
0 < p < q < 1);
where h0ð�Þ and h00ð�Þ, respectively, denote the first order andsecond order derivatives of hð�Þ.
The following theorem provides conditions under which acoherent system of used ID components performs better/worsethan a used coherent system having ID components, in the failurerate ordering.
Theorem 2. Suppose that Xt and X have the same reliability copula.Then sðXÞð Þt 6fr Pfr
� �s Xtð Þ holds for a fixed t > 0 (for all t > 0) if and
only if one of the following equivalent conditions hold:
(a) h pq
� �=h pð Þ is decreasing (increasing) in p 2 ð0;1Þ for q ¼ FðtÞ
(for all q 2 ð0;1ÞÞ;(b)
h qh�1ðpÞð Þp is increasing (decreasing) in p 2 ð0;1Þ for q ¼ FðtÞ (for
all q 2 ð0;1ÞÞ;(c) 1
p h h�1ðpqÞh�1ðqÞ
� �is decreasing (increasing) in p 2 ð0;1Þ for q ¼ FðtÞ
(for all q 2 ð0;1ÞÞ;
(d) h0 ðpÞhðpÞ P ð6Þ h0 p
qð Þqh p
qð Þ, for all p 2 ð0; qÞ and q ¼ FðtÞ (for all
0 < p < q < 1).
The following theorem provides conditions under which acoherent system of used ID components performs better/worsethan a used coherent system having ID components, in thereversed failure rate ordering.
Theorem 3. Assume that Xt and X have the same reliability copula.Then sðXÞð Þt 6rfr Prfr
� �s Xtð Þ holds for a fixed t > 0 (for all t > 0) if
and only if one of the following equivalent conditions hold:
(a)1�
h qh�1ð1�pÞð ÞhðqÞp is increasing (decreasing) in p 2 ð0;1Þ for q ¼ FðtÞ
(for all q 2 ð0;1ÞÞ;
(b)1�h p
qð Þ1�h pð Þ
h qð Þis decreasing (increasing) in p 2 ð0;1Þ for q ¼ FðtÞ (for all
q 2 ð0;1ÞÞ;
(c) h0 pð Þ
h qð Þ 1�hðpÞhðqÞ
� � 6 ðPÞ h0 pqð Þ
q 1�h pqð Þð Þ, for all p 2 ð0; qÞ and q ¼ FðtÞ (for all
0 < p < q < 1).
The following theorem provides conditions under which acoherent system of used ID components performs better/worse
than a used coherent system having ID components, in the usualstochastic ordering.Theorem 4. Suppose that Xt and X have the same reliability copula.Then,
sðXÞð Þt 6st Pstð Þs Xtð Þ;
holds for a fixed t > 0 (for all t > 0) if and only if
hpq
� �P ð6Þh pð Þ
h qð Þ ; for all p 2 ð0; qÞ and q
¼ FðtÞ ðfor all 0 < p < q < 1Þ: ð2:5Þ
Remark 1. The condition (2.5) can be equivalently written as
hðuÞhðvÞ P ð6Þ hðuvÞ; 0 < u;v < 1;
which is the same as condition (2.14) in Navarro, del Águila, Sordo,and Suárez-liorens (2013) needed for preservation of the ‘NewBetter than Used’ (‘New Worse than Used’) property by a coherentsystem.
Now we provide some illustrative examples to study thecomparative analysis between a used coherent system having IDcomponents and coherent system of used but functioning IDcomponents. The following example shows that if we consider aseries system of n components having dependence structuredescribed by Clayton-Oakes (CO) copula, then a used series systemis better than a series system of used but functioning components,under the likelihood ratio ordering.
Example 1. Let sðXÞ ¼min X1; . . . ;Xnð Þ with ID componentsX1;X2; . . . ;Xn having distribution described by Clayton-Oakes(CO) reliability copula:
Kðu1; . . . ;unÞ ¼Xn
i¼1
u1�hi � n� 1ð Þ
! 11�h
; 0 < ui < 1; i ¼ 1; . . . ;n;
where h 2 ð1;1Þ is a fixed parameter. For series system distortedfunction is given as (see for example Navarro et al., 2012):
hðuÞ ¼ K u; . . . ;uð Þ ¼ nu1�h � n� 1ð Þ� � 1
1�h; u 2 ð0;1Þ; ð2:6Þ
and
h0ðuÞ ¼ n n� n� 1ð Þuh�1� � h
1�h; u 2 ð0;1Þ: ð2:7Þ
Now for fixed q 2 ð0;1Þ, consider
w1;qðpÞ ¼h0 p
q
� �h0 pð Þ
¼ qh mq;hðpÞ þ 1� � h
1�h; p 2 ð0; qÞ;
where
mq;hðpÞ ¼n qh�1 � 1� �
n� n� 1ð Þph�1 ; p 2 ð0; qÞ:
Clearly mq;hðpÞ is a decreasing function of p on ð0; qÞ. This impliesthat w1;qðpÞ is an increasing function of p in ð0; qÞ. Now, usingTheorem 1, it follows that sðXÞð Þt Plr s Xtð Þ.
The following example shows that their exist coherent systemswhere sðXÞð Þt Pst s Xtð Þ does not hold (i.e., the systems correspond-ing to sðXÞð Þt and s Xtð Þ are not ordered with respect to any of

428 N. Gupta et al. / European Journal of Operational Research 240 (2015) 425–430
stochastic orders defined in Definition 1) and sðXÞð Þt 6lr s Xtð Þ holds(i.e., the systems corresponding to sðXÞð Þt and s Xtð Þ are ordered ina different way than in Example 1).
Example 2. Let sðXÞ ¼ min X1;maxðX2;X3Þð Þ with component life-times X1;X2;X3, having distribution described by reliability copula:
Kðu1;u2;u3Þ¼u1u2u3ð1það2�u1�u2Þð1�u3ÞÞ; 0<ui <1; i¼1;2;3;
where a 2 ½�0:5;0:5� is a fixed parameter. Now consider the follow-ing two cases:
Case 1. Let a ¼ �0:5. Then, for the system sðXÞ, distortedfunction is given as (see for example Navarro et al., 2012):
hðuÞ ¼ K u;u;1ð Þ þ K u;1;uð Þ � K u;u;uð Þ¼ ð2þ aÞu2 � ð1þ 4aÞu3 þ 5au4 � 2au5; u 2 ð0;1Þ
and,
h0ðuÞ ¼ 2ð2þ aÞu� 3ð1þ 4aÞu2 þ 20au3 � 10au4; u 2 ð0;1Þ:
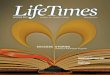
For fixed q ¼ 0:4, we observe that the functions hðp=qÞ andhðpÞ=hðqÞ, as functions of p, cross each other on ð0; 0:4Þ (seeFig. 1). Therefore, using Theorem 4, neither sðXÞð Þt 6st s Xtð Þ norsðXÞð Þt Pst s Xtð Þ holds.
Case 2. If we choose a ¼ 0, then the we get independent copulaKðu1;u2;u3Þ ¼ u1u2u3. The distorted function is hðpÞ ¼ 2p2 � p3
and, for fixed q 2 ð0;1Þ,h0ðpqÞh0ðpÞ
¼ 1q2 1� ð1� qÞ 4p
4p� 3p2
� ;
is a decreasing function of p on ð0;1Þ. Now, Using Theorem 1, itfollows that sðXÞð Þt 6lr s Xtð Þ.
The following example shows that if we consider IID compo-nents, then r-out-of-n system of used components is better thana used r-out-of-n system under likelihood ratio ordering.
Example 3. Consider r-out of n system, r 6 n, with IID compo-nents. Then the distorted function is given by
hðpÞ ¼ n!
ðn� rÞ!ðr � 1Þ!
Z 1
1�pun�rð1� uÞr�1du; 8p 2 ð0;1Þ:
Therefore, from Corollary 2.1 of Gupta (2013) it follows thath0ðp=qÞ=h0ðpÞ is deceasing function of p on ð0;1Þ. Hence usingTheorem 1 it follows that sðXÞð Þt 6lr s Xtð Þ.
Fig. 1. Plots of hðp=qÞ and hðpÞ=hðqÞ against p for a ¼ �0:5 and q ¼ 0:4.
Remark 2. The notion of inactivity time is associated with pastlifetime and time since failure. Studying the inactivity time isuseful in Forensic science, estimation of left-censored data etc(refer to Nanda, Singh, Misra, & Paul, 2003). Here we provide abrief discussion on stochastic comparison of inactivity time of acoherent with a system comprising of components whose life-times are the same as inactivity times of failed components.Denote the inactivity time of a coherent system having ID compo-nents X1; . . . ;Xn by sðXÞð ÞðtÞ ¼ s X1; . . . ;Xnð Þð ÞðtÞ. Then the reliability
function of sðXÞð ÞðtÞ is given by GTS� ðxÞ ¼ P sðXÞð ÞðtÞ > x� �
¼1�hðFðt�xÞÞ
1�hðFðtÞÞ; 0 < x < t. Similarly denote the lifetime of a coherent sys-
tem comprising of components having lifetimes Y�1; . . . ; Y�n, whereY�i ¼ ðt � XijXi 6 tÞ; i ¼ 1; . . . ;n, by s XðtÞ
� �¼ s Y�1; . . . ;Y�n
� �. Clearly
the reliability function of sðXðtÞÞ is given by GTC� ðxÞ ¼P s XðtÞ� �
> x� �
¼ h 1�Fðt�xÞ1�FðtÞ
� �; 0 < x < t. Here we have assumed that
ðY�1; . . . ;Y�nÞ and ðX1; . . . ;XnÞ have the same reliability copula. Thenthe following results may be obtained (proofs of these results aresimilar to proofs of Theorems 1–4, hence omitted):
R1 sðXÞð ÞðtÞ 6lr Plrð Þs XðtÞ� �
, holds for a fixed t > 0 (for all t > 0) ifand only if one of the following equivalent conditions hold:
R1 sðXÞð ÞðtÞ �lr �lrð Þs XðtÞ� �
, holds for a fixed t > 0 (for all t > 0) if
and only if one of the following equivalent conditions hold:� �
(a) 1� h 1� qh�1ðpÞ is a convex (concave) function ofp 2 ð0;1Þ for q ¼ FðtÞ (for all q 2 ð0;1ÞÞ;(b) 1� h 1�h�1ð1�ð1�pÞqÞ
1�h�1ð1�qÞ
� �is a convex (concave) function of
p 2 ð0;1Þ for q ¼ FðtÞ (for all q 2 ð0;1ÞÞ;(c) h0 1�p
1�q
� �=h0 pð Þ is an increasing (decreasing) function of
p 2 ð0;1Þ for q ¼ FðtÞ (for all q 2 _ð0;1ÞÞ;(d) h00 pð Þ
h0 pð Þ þh00 1�p
1�qð Þ1�qð Þh0 1�p
1�qð Þ6 ðPÞ0; 8p 2 ðq;1Þ and q ¼ FðtÞ (for all
0 < q < p < 1).� � � �
R2 sðXÞð ÞðtÞ �fr �fr s XðtÞ , holds for a fixed t > 0 (for all t > 0)if and only if one of the following equivalent conditions
hold: � �� �
(a) h 1�p1�q = 1� h pð Þð Þ is an increasing (decreasing) func-
tion of p 2 ð0;1Þ for q ¼ FðtÞ (for all q 2 ð0;1ÞÞ;(b) h0 pð Þ
1�h pð Þ P ð6Þh0 1�p
1�qð Þ1�qð Þh 1�p
1�qð Þ; 8p 2 ðq;1Þ and q ¼ FðtÞ (for all
0 < q < p < 1).� � � �
R3 sðXÞð ÞðtÞ �rfr �rfr s XðtÞ , holds for a fixed t > 0 (for all t > 0)if and only if one of the following equivalent conditionshold: � �� �.� �
(a) 1� h 1�p1�q 1� 1�h pð Þ1�h qð Þ is an increasing (decreasing)
function of p on ðq;1Þ for q ¼ FðtÞ (for all 0 < q < p < 1).
(b)h0 1�p
1�qð Þ1�qð Þh 1�p
1�qð ÞP ð6Þ h0 ðpÞ
1�hðpÞ, 8p 2 ðq;1Þ and q ¼ FðtÞ (for all
0 < q < p < 1).� �
R4 sðXÞð ÞðtÞ �st �stð Þs XðtÞ holds for a fixed t > 0 (for all t > 0) ifand only if 1�hðpÞ1�hðqÞ 6 ðPÞh
1�p1�q
� �; 8p 2 ðq;1Þ and q ¼ FðtÞ (for all
0 < q < p < 1).
Example 4. Consider a series system with CO copula as describedin Example 1. Suppose that h P 2. Now for fixed q 2 ð0;1Þ andp 2 ðq;1Þ, consider
h0 1�p1�q
� �h0 pð Þ
¼n� n�1ð Þ ð1�pÞh�1
ð1�qÞh�1
� � h1�h
n� n�1ð Þph�1ð Þh
1�h
¼ð1�qÞh uq;hðpÞ�vq;hðpÞ� � h
1�h; ð2:8Þ

N. Gupta et al. / European Journal of Operational Research 240 (2015) 425–430 429
where uq;hðpÞ ¼ n 1�qð Þh�1
n� n�1ð Þph�1 ; and; vq;hðpÞ ¼ ðn�1Þ 1�pð Þh�1
n� n�1ð Þph�1 . Clearly for a
fixed q 2 ð0;1Þ; uq;hðpÞ is an increasing function of on ðq;1Þ. Also
v 0q;hðpÞ ¼ðn� 1Þ h� 1ð Þ 1� pð Þh�2
n� n� 1ð Þph�1ð Þ2�nþ ðn� 1Þph�2� �
6 0; 8p
2 ðq;1Þ:
Thus vq;hðpÞ is a decreasing function of p on ðq;1Þ. Now from (2.8) it
is clear thath0 1�p
1�qð Þh0 pð Þ is an increasing function of p on ðq;1Þ for h P 2.
Using R1, it follows that sðXÞð ÞðtÞ 6lr s XðtÞ� �
.
Acknowledgement
NG is thankful to NBHM, DAE, India for a research Grant(NBHM/R.P.21/2012/Fresh/1744). The authors are thankful to thereferee for his/her valuable suggestions which significantlyimproved the presentation.
Appendix A
Proof of Theorem 1.
(a) Fix t > 0. Note that sðXÞð Þt �lr �lrð Þs Xtð Þ if and only ifGTS G�1
TCðpÞ is a convex (concave) function of p on ð0;1Þ. For
p 2 ð0;1Þ, we have
GTS G�1TCðpÞ ¼ GTS F�1 FðtÞh�1ðpÞ
� �� t
� �¼
h FðtÞh�1ðpÞ� �
hðFðtÞÞ:
Therefore sðXÞð Þt �lr �lrð Þs Xtð Þ if and only if, for fixed
q 2 ð0;1Þ, h qh�1ðpÞ� �
is a convex (concave) function of p on
ð0;1Þ.(b) Fix t > 0. Using Theorem 2.4 (iv) of Navarro et al. (2013), we
have sðXÞð Þt �lr �lrð Þs Xtð Þ if and only if hCh�1S ðpÞ is a concave
(convex) function of p on ð0;1Þ. Now the result follows onnoting that
hCh�1S ðpÞ ¼ hC h�1ðphðqÞÞ
� �¼ h
h�1ðphðqÞÞq
!:
(c) Using Theorem 2.5 of Navarro et al. (2013) and noting thath0TCðpÞ ¼ h0ðp=qÞ
� �=q and hTS ¼ h0ðpÞ=hðqÞ, we have the
required result.(d) Fix t > 0. Then sðXÞð Þt �lr �lrð Þs Xtð Þ if and only if
gTSðxÞP gTC
ðxÞ; 8x > 0, where gTSand gTC
are eta functionsof sðXÞð Þt and s Xtð Þ, respectively. Consider
gTSðxÞ � gTC
ðxÞ ¼ � f 0SðxÞfSðxÞ
þ f 0CðxÞfCðxÞ
¼ f ðt þ xÞh00 Fðt þ xÞ� �
h0 Fðt þ xÞ� � � h00 FðtþxÞ
FðtÞ
� �FðtÞh0 FðtþxÞ
FðtÞ
� �0@
1A:
Clearly sðXÞð Þt �lr �lrð Þs Xtð Þ if and only if, for fixed q 2 ð0;1Þ,h00 pð Þh0 pð Þ P ð6Þ h00 p
qð Þqh0 p
qð Þ for all p 2 ð0; q�.
Proof of Theorem 2.
(a) Using Theorem 2.4 (ii) Navarro et al. (2013), we have therequired result.
(b) Fix t > 0. Note that sðXÞð Þt 6fr Pfr� �
s Xtð Þ if and only ifGTS
G�1TCðpÞ
p is an increasing (decreasing) function of p on ð0;1Þ.For p 2 ð0;1Þ, we have
GTS G�1TCðpÞ ¼ GTS F�1 FðtÞh�1ðpÞ
� �� t
� �¼
h FðtÞh�1ðpÞ� �
hðFðtÞÞ:
Therefore sðXÞð Þt 6fr Pfr
� �s Xtð Þ if and only if, for fixed
q 2 ð0;1Þ, h qh�1ðpÞð Þp is an increasing (decreasing) function of p
on ð0;1Þ.(c) Fix t > 0. Then sðXÞð Þt 6fr Pfr
� �s Xtð Þ if and only if
GTCG�1
TSðpÞ
p is adecreasing (increasing) function of p on ð0;1Þ. Also for anyp 2 ð0;1Þ,
GTC G�1TSðpÞ ¼ GTC F�1 h�1 ph FðtÞ
� �� �� �� t
� �
¼ hh�1 ph FðtÞ
� �� �FðtÞ
!:
Therefore sðXÞð Þt 6fr Pfr
� �s Xtð Þ if and only if, for fixed
q 2 ð0;1Þ, 1p h h�1ðpqÞ
h�1ðqÞ
� �is a decreasing (increasing) function of
p on ð0;1Þ.(d) Fix t > 0. Then
sðXÞð Þt 6fr Pfr
� �s Xtð Þ
() rTS ðxÞP ð6ÞrTC ðxÞ; 8x > 0
()h0 Fðt þ xÞ� �
h Fðt þ xÞ� � P ð6Þ
h0 FðtþxÞFðtÞ
� �FðtÞh FðtþxÞ
FðtÞ
� � ; 8x > 0:
Therefore it is clear that
sðXÞð Þt 6fr Pfr
� �s Xtð Þ
() h0ðpÞhðpÞ P ð6Þ
h0 pq
� �qh p
q
� � ; 8p 2 ð0; qÞ; and fixed q 2 ð0;1Þ:
Proof of Theorem 3. Proof is similar to proof of Theorem 2, henceomitted.
Proof of Theorem 4. Let t > 0 be fixed. Then,
sðXÞð Þt 6st Pstð Þs Xtð Þ() GTS ðxÞ 6 ðPÞGTC ðxÞ; 8x > 0
()h Fðt þ xÞ� �h FðtÞ� � 6 ðPÞh Fðt þ xÞ
FðtÞ
!; 8x > 0
() hpq
� �P ð6Þ h pð Þ
h qð Þ ; for 0 < p < q < 1:
References
Barlow, R. E., & Proschan, F. (1981). Statistical theory of reliability and life testing.Silver Spring, MD: Madison.
Block, H., Savits, T., & Singh, H. (1998). The reversed hazard rate function. Probabilityin the Engineering and Informational Sciences, 12, 69–70.
Chandra, N. K., & Roy, D. (2001). Some results on reversed hazard rate. Probability inthe Engineering and Informational Sciences, 15, 95–102.
Denneberg, D. (1990). Premium calculation: Why standard deviation should bereplaced by abosulte deviation. ASTIN Bulletin, 20, 181–190.
Eryilmaz, S. (2012). On the mean residual life of a k-out-of-n:G system with a singlecold standby component. European Journal of Operational Research, 222(2),273–277.
Glaser, R. E. (2001). Bathtub and related failure rate characterizations. Journal ofAmerican Statistical Association, 75, 667–672.
Gupta, N. (2013). Stocahstic comparison of residual life times and inactivity times ofcoherent systems. Journal of Applied Probability, 30(3), 848–860.
Gupta, N., & Kumar, S. (2014). Stochastic comparisons of component and systemredundancies with dependent components. Operations Research Letters, 42,284–289.

430 N. Gupta et al. / European Journal of Operational Research 240 (2015) 425–430
Li, X., & Lu, J. (2003). Stochastic comparison on residual life and inactivity time ofseries and parallel systems. Probability in the Engineering and InformationalSciences, 17, 267–275.
Li, X., & Zuo, M. J. (2004). Stochastic comparisons of residual life and inactivity timeat a random time. Stochastic Models, 20(2), 229–235.
Misra, N., Gupta, N., & Dhariyal, I. D. (2008). Stochastic properties of residual life andinactivity time at a random time. Stochastic Models, 24(1), 89–102.
Nanda, A. K., Singh, H., Misra, N., & Paul, P. (2003). Reliability properties of reversedresidual lifetime. Communications in Statistics – Theory and Methods, 32(10),2031–2042.
Navarro, J., del Águila, Y., Sordo, M. A., & Suárez-liorens (2012). Stochastic orderingproperties for systems with dependent identically distributed components.Applied Stochastic Models in Business and Industry, 29, 264–278.
Navarro, J., del Águila, Y., Sordo, M. A., & Suárez-liorens (2013). Preservation ofreliability classes under the formation of coherent systems. Applied StochasticModels in Business and Industry. http://dx.doi.org/10.1002/asmb.1985. Articlefirst published online: 3 JUN 2013.
Navarro, J., Pellerey, F., & Di Crescenzo, A. (2015). Orderings of coherent systemswith randomized dependent components. European Journal of OperationalResearch, 240(1), 127–139.
Navarro, J., & Rychlik, T. (2010). Comparisons and bounds for expected lifetimes ofreliability systems. European Journal of Operational Research, 207, 309–317.
Navarro, J., & Spizzichino, F. (2010). On the relationship between copulas oforder statistics and marginal distributions. Statistics and Probability Letters, 80,473–479.
Nelsen, R. B. (2006). An introduction to copulas. New York: Springer.Pellerey, F., & Petakos, K. (2002). On the closure property of the NBUC class under
the formation of parallel systems. IEEE Transactions on Reliability, 51(4),452–454.
Quiggin, J. (1982). A theory of anticipated utility. Journal of Economic Behavior andOrganisation, 3, 323–343.
Ross, S. M. (1996). Stochastic process (2nd ed.). New York: Wiley.Shaked, M., & Shanthikumar, J. G. (2007). Stochastic orders. New York: Springer.Si, X., Wang, W., Hu, C., & Zhou, D. (2011). Remaining useful life estimation – A
review on the statistical data driven approaches. European Journal of OperationalResearch, 213(1), 1–14.
Sordo, M. A., & Suarez–Liorens, A. (2011). Stochastic comparisons ofdistorted variability measures. Insurance: Mathematics and Economics, 49,11–17.
Wang, S. (1995). Insurance pricing and increased limits rate making by proportionalhazard transforms. Insurance: Mathematics and Economics, 17, 43–54.
Wang, S. (1996). Premium calculation by transforming the layer premium density.ASTIN Bulletin, 26, 71–92.
Wang, S., & Young, V. R. (1998). Ordering risks: expected utility theory versusYarri’s dual theory of risk. Insurance: Mathematics and Economics, 22,145–161.
Yarri, M. E. (1987). The dual theory of choice under risk. Econometrica, 55,95–115.
Zhang, S. H., & Li, X. H. (2003). Comparison between a system of used componentsand a used system. Journal of Lanzhou University, 39, 11–13.