Embed Size (px)
Citation preview
![Page 1: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/1.jpg)
Stepped pressure profile equilibria via partial Taylor relaxation
R. L. Dewar1, M. J. Hole1, S. R. Hudson2
[1] Research School of Physical Sciences and Engineering, Australian National University, ACT 0200, Australia
[2] Princeton Plasma Physics Laboratory, New Jersey 08543, U.S.A.
Supported by Australian Research Council Grant DP0452728
![Page 2: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/2.jpg)
Contents
1. MHD equilibria in 3D
2. Project Aims
3. A stepped pressure profile model• Cylindrical plasma equilibria and stability• Ongoing work : generalization to arbitrary
geometry
4. Summary
![Page 3: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/3.jpg)
1. 3D MHD equilibria
€
∇×B = μ0J,
€
B ⋅n = 0Ideal MHD model
3D MHD equilibria are solutions of ideal MHD in systems with no (spatial) ignorable co-ordinates
€
∇p = J×B,
€
∇⋅B = 0,
Tokamaks, due to coil ripple or instabilities:
E.g. Stellarators:
Astrophysical plasmas:
![Page 4: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/4.jpg)
Winding Numbers for Toroidal Magnetic Fields
• In tokamaks, conventionally use winding number q = / 2
q = irrational: B ergodically passes through all points in magnetic surface.
q = rational (m/n) : B lines close on each other.
(ie. toroidal B rotations per poloidal B rotation)
• In stellarators, use rotational transform : ι =1/ q
• In tokamaks, and ideally in stellarators, B lies in magneticsurfaces, which field lines cover by winding around in a helical fashion
![Page 5: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/5.jpg)
In general 3D MHD equilibria, p 0 and smoothness of profiles are incompatible:
€
J|| = σB
€
∇⋅J = 0
€
B ⋅∇σ = −∇ ⋅J⊥
But B. is a very singular operator: either blows up at each
rational magnetic surface (which would be dense, if they
existed), or •J = 0 densely. Suff. to take€
=λμ0
− B ⋅∇( )−1∇ ⋅J⊥
Set
, λ arb. const. along field lines
“In order to have a static (3D) equilibrium, p’() must be zero in the
neighborhood of every rational rotational transform, and flux surfaces must be relinquished”
Cf. Grad, Toroidal Containment of plasma, Phys. Plas. 10 (1967)
Solution:
. Then
€
J⊥ =B×∇p /B2 = 0
So, to ensure a mathematically well-defined J, we set p = 0 over finite
regions B = λB — force-free field
![Page 6: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/6.jpg)
Beltrami & piecewise Beltrami• Force-free fields for which λ = const over a
volume are called Beltrami fields • Strong field-line chaos in a region implies a
Beltrami field in region since λ = const on a field line, and a single field line fills a chaotic regions ergodically
• Even if there are islands in the region, Beltrami assumption is natural, as it is the simplest equilibrium solution
• If there are surfaces separating chaotic regions, λ and p can jump across such surfaces
![Page 7: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/7.jpg)
1. Hamiltonian mechanics B solutions:
• Perturbs an integrable Hamiltonian p within a torus T0 (flux surface) by a periodic functional perturbation p1:
3. Bruno and Laurence (c. 1996, Comm. Pure Appl. Maths, XLIX, 717-764, )Derived existence theorems for sharp boundary solutions for tori for small departure from axisymmetry.
• KAM theory : if flux surface are sufficiently far from resonance (q sufficiently irrational), some flux surfaces survive for < c
KAM surfaces
step the pressure only across KAM surfaces.
2. Kolmogorov Arnold Moser (KAM) Theory (c. 1962)
€
p =ψ p 0 + εψ p1
d
d p
ζ
∂ =− , d
d p
ζ
∂ = H = p, t = ζ p = , q = s
ζ
![Page 8: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/8.jpg)
Approximation of smooth profiles : E.g. Cylindrical Equilibria
p but can be made arbitrarily close to a smooth function by letting number of steps go to , step height to 0. Not differentiable, but no significant generality has been lost.
![Page 9: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/9.jpg)
2. Project Aims (1) design a convergent algorithm for constructing 3D equilibria,
solve a 50-year old fundamental mathematical problem
quantify relationship between magnitude of departure from axisymmetry and existence of 3D equilibria
provide a better computational tool for rapid design and analysis
(2) explore relationship between ideal MHD stability of multiple interface model and internal transport barrier formation
in MAST …M. J. Hole et al., PPCF, 2005Courtesy JAERI
![Page 10: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/10.jpg)
• In 1974, Taylor argued that turbulent plasmas with small resistivity and viscosity relax to a Beltrami field, B = λB
i.e. solutions to W = 0 of functional :
€
W = U − (λ /2μ0)H p
€
P : ∇ ×B = λB
I :B2
2μ0
+ p = 0
V : ∇ ×B = 0
€
U =B2
2μ0
+p
γ −1
⎛
⎝ ⎜
⎞
⎠ ⎟dτ
P UV∫Internal energy:
Taylor solved for minimum U subject to fixed H
Total Helicity :
€
H = (A ⋅BP
∫ )dτ
I
P
V
3. Taylor relaxation
(where <> denotes jump across interface I)
• We invoke field-line chaos rather than turbulence, and generalize to partially relaxed plasmas.
![Page 11: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/11.jpg)
Extension to multiple interfaces : Frustrated Taylor Relaxation
Generalization of single interface model :
- Spies et al Relaxed Plasma-Vacuum Systems, Phys. Plas. 8(8). 2001
- Spies. Relaxed Plasma-Vacuum Systems with pressure, Phys. Plas. 8(8). 2003
€
U i =Bi
2
2μ0
+Pi
γ −1
⎛
⎝ ⎜
⎞
⎠ ⎟dτ 3
R i∫
€
H i = (A i ⋅BiV∫ )dτ 3 − dl.A iC s
∫ dl.A iCl∫
€
M i = Pi1/γ dτ 3
R i∫
potential energy functional:
helicity functional:
mass functional: loop integrals conserved
New system comprises:
• N plasma regions Pi in relaxed states.
• Regions separated by ideal MHD barrier Ii.
• Enclosed by a vacuum V,
• Encased in a perfectly conducting wall W
…I1
In-1
In
V Pn
P
1
W
![Page 12: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/12.jpg)
Partial relaxation using ideal invariants—earlier work
• Like Bhattacharjee & Dewar, Energy Principle with Global Invariants, Phys. Fluids 25, 887 (1982) in that we constrain relaxation with an extended class of weighted helicities that are all invariant under ideal MHD perturbations
• Differ from B&D in using step-function weights
![Page 13: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/13.jpg)
1st variation “relaxed” equilibria
Energy Functional W:
€
W = U i −λ i
2μ0
H i −υ iM i
⎛
⎝ ⎜
⎞
⎠ ⎟
i=1
N
∑Setting 1W = 0 yields:
€
Pi : ∇ ×B = λ iB
Pi = constant
Ii : B ⋅n = 0
Pi + B2 /(2μ0) = 0
V : ∇ ×B = 0
∇ ⋅B = 0
W : B ⋅n = 0
n = unit normal to interfaces I, wall W
€
x = x i+1 − x i
Poloidal flux pol, toroidal flux t constant during relaxation:
€
Pi : ΨPi
t = constant
V : ΨVt = constant, ΨV
pol = constant
![Page 14: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/14.jpg)
2nd variation stable equilibria
€
Pi : ∇ ×b = μ ib
V : ∇ ×b = 0
∇ ⋅b = 0
W : B ⋅n = 0
+ expressions for perturbed fluxes, pol , t in each region.
. Yields
• Minimize 2W, wrt fixed constraint. Two possible choices are
€
N1 = dτ 3 b2
P1 U...U PN UV
∫
NB : b = Bn = ·n = interface displacement vector
€
N2 = dτ ξ n ⋅ξ n*
I i
∫i=1
N
∑
Find solutions of
€
L = 0
€
L = δ 2W − λN2with
€
Ii : bi,i+1 ⋅n =Bi,i+1 ⋅∇ξ n,i + ξ n,in ⋅∇ × n×Bi,i+1( )
ξ n,i* B ⋅b + ξ n,i B(n ⋅∇)B − λξ n,i[ ] = 0
![Page 15: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/15.jpg)
3.1 Eg: Cylindrical Equilibria
I1
I2
IN
W
P1
P2
PN
IN-1
V
…
},,0{:
)}()(),()(,0{:
)}(),(,0{:
0011
1011111
Vz
Viiiiiiiii
BBV
rYdrJkrYdrJkP
rJkrJkP
λλλλλλ
=++=
=
B
B
B
• Solutions to ∇× =B Bλ i
barriers at radial locations ri , B
V, BzV, ki, di,
Jm, Ym are Bessel functions
Total # unknowns = 4N+1
Variables # unknowns
k1…kN N
d2…dN N-1
λ1… λN N
r1… rN-1, rW N
BV, Bz
V 2
![Page 16: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/16.jpg)
Equilibria with positive shear exist
Eg. five-layer equilibrium solution
Contours of poloidal flux p
• q profile continuous in plasma regions, • core must have some reverse shear• Not optimized to model tokamak-like equilibria
![Page 17: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/17.jpg)
Spectral Analysis B solutions• Fourier decompose perturbed field b and interfaces
)(~ zmie κ +=bb )( zmiii eX κ +=
- are complex Fourier amplitudes
- m Z, κ 2 Z /Lz, Lz periodicity axial length
iX,~b
• In Pi, V, system of equations reduce to :
€
Pi : L F,m( ) ˜ b z[ ] = 0
V : L κ ,m( ) ˜ b z[ ] = 0
and L
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+−+=
2
22
2
2 1,
r
my
dr
d
rdr
dmyL
222 κλκ iiF −=with
)()(~
21, imiimiiz xKcxIcb +=Solns in Pi, V, of form
2N + 2 unknown constants : c11, c12,…cN1, cN2, cV1,cV2
- BC’s at wall and core eliminate two unknowns
- Apply 1st interface condition 2N times (inside + outside)
![Page 18: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/18.jpg)
Interface conds eigenvalue equation
• Second interface condition
[ ] 0)( ,,*
, =−∇⋅+⋅ ininin BB λξξξ nbB
( )1,1,1, +++ ××∇⋅+∇⋅=⋅ iinniiii BnnBnb ξξ
• First interface condition at each interface Ii
ci1, ci2 = f(Xi-1, Xi)
For N interfaces reduces to tridiagonal eigenvalue equation
η ηη η η
η η ηη η
λ
11 12
21 22 23
1 2 1 1 1
1
1
2
1
1
2
1
0 0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0 0
M M M M M M M M M
N N N N N N
NN NN
N
N
N
N
X
X
X
X
X
X
X
X− − − − −
−
− −
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
⋅
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
=
⎛
⎝
⎜⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟⎟
![Page 19: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/19.jpg)
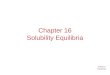
Stability benchmarked to 1-layer results• Use QR algorithm for Hessenberg matrices to solve for
all eigenvalues [Numerical Recipes, Ch. 11]• Benchmark 1-layer equilibrium scans to Kaiser and
Uecker, reproducing stability boundaries
EG. = 0 scan over Lagrange multiplier (μ) and jump in B angle at plasma/vacuum interface () for different conducting wall radii rl . Regions interior to each layer contour are stable.
Kaiser and Uecker, X1 fixed (N=0) Hole, Dewar, Hudson
€
N2 = dτ ξ n ⋅ξ n*
I i
∫i=1
N
∑
![Page 20: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/20.jpg)
Configuration space contracts with increasing beta
Finite scan over Lagrange multiplier (μ) and jump in B angle at plasma/vacuum interface () for wall radius rl
=1.1.
Regions interior to each layer contour are stable.
![Page 21: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/21.jpg)
ITB Configurations
€
k1,k2,d2,λ1,λ 2,r1,rw,BθV ,Bz
V{ }
€
q0,qmin,q100, p1, p2,λ 2,rw, BV{ }
+ constrain q1i = q1
o
λ 1
0
4= Lq( )( )
qr
L
J r
J rITB ITB
ITBmin =
2 0 1
1 1
π λ
λ
& rITB from solution of
![Page 22: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/22.jpg)
Configuration Scan
![Page 23: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/23.jpg)
3D Beltrami field—first cutWeakly perturb plasma boundary:
Poincaré plot of B
∇× =B Bμ
μ =015.
using method of lines.
Some chaos visible.
€
k sin(2θ − φ) + k sin(3θ − 2φ)
Solve
![Page 24: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/24.jpg)
4. Summary 1/2
(1) Flux surfaces support increases in pressure.
(2) High performance (ie. high pressure) fusion plasmas require good flux surfaces.
(3) Ab initiio: in 3D ideal MHD, p = 0 in regions of rational q,
• flux surfaces must be relinquished for rational qs.
(4) For highly irrational q, some flux surfaces survive.
(5) Project aims :
a) design a convergent algorithm for constructing 3D ideal MHD equilibria,
b) explore relationship between ideal MHD stability of multiple interface model and internal transport barrier formation
![Page 25: Stepped pressure profile equilibria via partial Taylor relaxation R. L. Dewar 1, M. J. Hole 1, S. R. Hudson 2 [1] Research School of Physical Sciences](https://reader034.pdfslide.us/reader034/viewer/2022051620/56649f295503460f94c432ca/html5/thumbnails/25.jpg)
Summary 2/2(6) Analytic stepped pressure equilibria have been constructed
and studied in cylindrical geometry
- different normalization give ballooning/ global stability
- code written to compute global stability… analysis in progress
(7) numerical algorithms to solve in arbitrary 3D geometry to be designed and implemented.



![A stepped pressure profile model for internal transport barriers M. J. Hole 1, S. R. Hudson 2, R. L. Dewar 1, M. McGann 1 and R. Miills 1 [1] Research](https://img.pdfslide.us/doc/110x75/56649ec75503460f94bd32bb/a-stepped-pressure-profile-model-for-internal-transport-barriers-m-j-hole.jpg)