Embed Size (px)
Citation preview

Elasticity and relaxationof passive and active liquid crystals
Stefano Turzi – Politecnico di Milano
Arezzo, 25 January 2019

Outline
Nematics: outline of LCs
Nematoacoustics: experimental facts
Viscoelastic nematodynamics: relaxingnematic elastomers
Results: weak-flow approximation andnematoacoustics
Active nematics
Active viscoelastic nematodynamics: activeremodelling force
Results: spontaneous flow and self-channelling

Nematic liquid crystals
The nematic phase is characterized by long-rangeorientational order i.e. the long axes of the molecules tend toalign along a preferred direction, but molecules do not exhibitany positional order.
The local orientational order is described by the director n
The elastic free energy promotes alignment (|∇n| costs energy)
The director lives in the current configuration and is anadditional degree of freedom

Dynamics: Ericksen-Leslie theory
The stress tensor comprise anisotropic viscosity coefficients
TEL = −pI + α1(n ·Dn)(n⊗n) + α2(n⊗n)
+ α3(n⊗ n) + α4D + α5(Dn⊗n) + α6(n⊗Dn)
+ α7
((tr D)(n⊗n) + (n ·Dn)I
)+ α8(tr D)I,
α1, . . . α6, are the Leslie coefficients
α7, α8 are bulk viscosities.
Parodi identity: α2 + α3 = α6 − α5
n := n−Wn, W = spin-tensor

Nematoacoustics/1: Anisotropy of soundspeed

Nematoacoustics/2: Anisotropy of soundattenuation
Abstract. Ultrasonic
measurements (2 to 6 MHz)
on a room temperature
nematic liquid crystal
have shown the attenuation
to vary strongly with the
angle θ between the
sound-wave propagation
direction and the
direction of an aligning
magnetic field [. . . ]

(Partial) theoretical explanations
Ericksen-Leslie
Correct angular dependence for the attenuation (Forster,Lubensky et al., 1971),
but not for the sound speed (Sellers et al., 1988).
Incorrect frequency dependence for both (∼ ω2)
Frequency-independent viscosity coefficients
Selinger et al. (2002); Virga (2009)include an elastic coupling term (∇ρ · n)2
Correct angular dependence for both sound speed and attenuation
Incorrect frequency dependence (Kozhevnikov, 2005)
Second-gradient fluids may develop peculiar boundary layers

(Partial) theoretical explanations
Ericksen-Leslie
Correct angular dependence for the attenuation (Forster,Lubensky et al., 1971),
but not for the sound speed (Sellers et al., 1988).
Incorrect frequency dependence for both (∼ ω2)
Frequency-independent viscosity coefficients
Selinger et al. (2002); Virga (2009)include an elastic coupling term (∇ρ · n)2
Correct angular dependence for both sound speed and attenuation
Incorrect frequency dependence (Kozhevnikov, 2005)
Second-gradient fluids may develop peculiar boundary layers

Viscoelastic fluids
Landau Lifschitz, “Theory of elasticity” (2nd ed, 1970)

Relaxation in a modern framework
The natural configuration is allowed to evolve.
G is associated to therelaxation mechanismand drives the system tolower energy states.
Bref
Bnat
B
F
G Fe = FG−1
Problem: prescribe an evolution equation for G.

Relaxation in a modern framework
The natural configuration is allowed to evolve.
G is associated to therelaxation mechanismand drives the system tolower energy states.
Bref
Bnat
B
F
G Fe = FG−1
Problem: prescribe an evolution equation for G.
For more details:[1] Di Carlo and Quiligotti, Mech. Res. Commun., 2002, 29, 449–456.[2] Rajagopal and Srinivasa, Int. J. Plast., 1998, 14, 969–995.[3] Rajagopal and Srinivasa, JNNFM, 2001, 99, 109–124.

Constitutive assumptions/1: Nematic elasticity
NLCs are transversely isotropic about n. The directoris not material: it is not conveyed by macroscopicdeformation.
Fe = FG−1, Be = FeF>e is the effective left
Cauchy-Green strain tensor. We also use theinverse relaxing strain H = (G>G)−1.Shape tensor:
Ψ(ρ,n) = a(ρ)2n⊗n + a(ρ)−1(I− n⊗n) ,
with a(ρ) the aspect ratio.
Free energy
σ(ρ,Be,n) = σiso(ρ)︸ ︷︷ ︸not relaxing
+1
2µ(ρ)
[tr(Ψ−1Be − I
)− log det(Ψ−1Be)
]︸ ︷︷ ︸
relaxing nematic elastomer
Energy minimum attained in Be = Ψ

Anisotropic elasticity in simulations
The intermulecular distance is not isotropic. This induces anatural anisotropic strain.Different energy cost is associated to deformations along thedirector and perpendicular to it.
Berardi, Emerson, Zannoni (1993)

Dissipation/1
D := W (ext)︸ ︷︷ ︸power expended by
the external forces
− K︸︷︷︸rate of change of
the kinetic energy
− F︸︷︷︸rate of change of
the free energy
≥ 0,
1 For any isothermal process, for any portion Pt of the body at alltimes, we require D ≥ 0;
2 The dissipation must be frame-invariant (superimposed rigidbody motions do not dissipate);
3 A positive dissipation (D > 0) is only due to materialreorganisation (i.e., evolution of the natural configuration);
4 The evolution equation is obtained according to linearirreversible thermodynamics.

Mathematical definitions
D =
∫Pt
ξ dv, ξ ≥ 0,
K + F :=
∫Pt
(1
2ρv2 + ρσ(ρ,Be,n,∇n)
)dv.
W (ext) :=
∫Pt
b · v dv +
∫∂Pt
t(ν) · v da+
∫Pt
g · n dv +
∫∂Pt
m(ν) · n da,
b is the external body force, t(ν) is the external traction on thebounding surface ∂Pt. The vector fields g and m(ν) are the externalgeneralized forces conjugate to the microstructure: n× g isusually interpreted as “external body moment” and n×m(ν) isinterpreted as “surface moment per unit area” (the couple stressvector). This interpretation comes from the identity n = ω×n, whereω is the (local) angular velocity of the director, so that, for instance,the external power density is written as g · n = ω · (n× g).

Dissipation/2 - final expression
After some algebra . . .
D =
∫Pt
(b− ρv + div T) · v dv +
∫∂Pt
(t(ν) −Tν
)· v da
+
∫Pt
(g − h) · n dv +
∫∂Pt
(m(ν) −
(ρ∂σ
∂∇n
)ν
)· n da
−∫Pt
ρ∂σ
∂Be·BO
e dv.
∂σ
∂H·.
H =∂σ
∂Be·BO
e
Upper-convected time-derivative (=0 when there is no materialreorganization)
BOe := (Be)
.
− (∇v) Be −Be (∇v)T = F.
HFT .

Dissipation/2 - final expression
After some algebra . . .
D =
∫Pt
(b− ρv + div T) · v dv +
∫∂Pt
(t(ν) −Tν
)· v da
+
∫Pt
(g − h) · n dv +
∫∂Pt
(m(ν) −
(ρ∂σ
∂∇n
)ν
)· n da
−∫Pt
ρ∂σ
∂Be·BO
e dv.
Cauchy stress-tensor
T = −ρ2 ∂σ∂ρ
I + 2ρ∂σ
∂BeBe − ρ(∇n)T
∂σ
∂∇n,
Molecular field
h := ρ∂σ
∂n− div
(ρ∂σ
∂∇n
)

Governing equations/1: balance eqns
According to our model, the material response is elastic withrespect to the natural configuration. In other words, energydissipation is uniquely associated to the evolution of the natural orstress-free configuration of the body, i.e., energy is dissipated onlywhen microscopic reorganization occurs.
Balance equations
ρv = b + div T + B.C.
T = −p I + ρµ(Ψ−1Be − I
)− ρ(∇n)T
∂σ
∂∇n
n×(g − h
)= 0 + B.C.

Governing equations/2: relaxation
Dissipation inequality (Clausius-Duhem inequality) simplifies to
ξ = −ρ ∂σ∂Be
·BOe ≥ 0.
We assume a linear dependence between fluxes and thermodynamicforces + Onsager reciprocal relations and obtain a “gradient flow”equation for Be (equivalent to max dissipation principle)
Evolution equation (general case)
D(BOe) + ρ
∂σ
∂Be= 0 .
D is a fourth-rank symmetric positive definite tensor compatible withthe uniaxial symmetry about n.

Governing equations/2: relaxation
Dissipation inequality (Clausius-Duhem inequality) simplifies to
ξ = −ρ ∂σ∂Be
·BOe ≥ 0.
We assume a linear dependence between fluxes and thermodynamicforces + Onsager reciprocal relations and obtain a “gradient flow”equation for Be (equivalent to max dissipation principle)
Evolution equation (when σ=nematic elastomers)
D(BOe) + Ψ−1 −B−1e = 0 .
D is a fourth-rank symmetric positive definite tensor compatible withthe uniaxial symmetry about n.

How many relaxation times?
Relaxation time tensor T = (Ψ⊗Ψ)D.
T =
τ1 0 0 0 0 0
0 τ1 0 0 0 0
0 0 τ2 0 0 0
0 0 0 τ2 0 0
0 0 0 0 τs + τd cos(2Θ) τd sin(2Θ)
0 0 0 0 τd sin(2Θ) τs − τd cos(2Θ)
,
τs =1
2(τ3 + τ4), τd =
1
2(τ3 − τ4).

How many relaxation times?
Relaxation time tensor T = (Ψ⊗Ψ)D.
T =
τ1 0 0 0 0 0
0 τ1 0 0 0 0
0 0 τ2 0 0 0
0 0 0 τ2 0 0
0 0 0 0 τs + τd cos(2Θ) τd sin(2Θ)
0 0 0 0 τd sin(2Θ) τs − τd cos(2Θ)
,
τs =1
2(τ3 + τ4), τd =
1
2(τ3 − τ4).
Relaxation times τ1, τ2, τ3 and τ4 are the eigenvalues of T.

How many relaxation times?
Relaxation time tensor T = (Ψ⊗Ψ)D.
T =
τ1 0 0 0 0 0
0 τ1 0 0 0 0
0 0 τ2 0 0 0
0 0 0 τ2 0 0
0 0 0 0 τs + τd cos(2Θ) τd sin(2Θ)
0 0 0 0 τd sin(2Θ) τs − τd cos(2Θ)
,
τs =1
2(τ3 + τ4), τd =
1
2(τ3 − τ4).
τ1 and τ2 are the relaxation times of the shearing modes in the planeorthogonal to n and the shearing modes that tilt n. Other two are
related to dilatations and isochoric extensions along n (but these lasttwo modes are coupled).

Fast-relaxationapproximation
possible large deformations
τi � τdef, i.e., low-frequency perturbations
Therefore, Be ≈ Ψ + B(1)e , with ‖B(1)
e ‖ � ‖Ψ‖.

Low-frequency stress tensor
T = −p I− ρµ(D(ΨO)Ψ
).
The comparison with the (compressible) E-L stress tensor
TEL = −pI + α1(n ·Dn)(n⊗n) + α2(n⊗n)
+ α3(n⊗ n) + α4D + α5(Dn⊗n) + α6(n⊗Dn)
+ α7
((tr D)(n⊗n) + (n ·Dn)I
)+ α8(tr D)I,
leads to the identification of the viscosity coefficients.

A new Parodi-like identity
α1 = ρµ(τ2 −
(a3 + 1
)2a3
τ1 + 3τ3(cos Θ)2 + 3τ4(sin Θ)2),
α2 = −ρµ(a3 − 1
)τ1,
α3 = −ρµ(1− a−3
)τ1,
α4 = 2ρµτ2,
α5 = ρµ( (
1 + a3)τ1 − 2τ2
),
α6 = ρµ( (
1 + a−3)τ1 − 2τ2
),
+ bulkviscosities
Parodi: α2 + α3 = α6 − α5 X
A new Parodi-like relation
α2
α3=α4 + α5
α4 + α6= a3.

A new Parodi-like identity
α1 = ρµ(τ2 −
(a3 + 1
)2a3
τ1 + 3τ3(cos Θ)2 + 3τ4(sin Θ)2),
α2 = −ρµ(a3 − 1
)τ1,
α3 = −ρµ(1− a−3
)τ1,
α4 = 2ρµτ2,
α5 = ρµ( (
1 + a3)τ1 − 2τ2
),
α6 = ρµ( (
1 + a−3)τ1 − 2τ2
),
+ bulkviscosities
Parodi: α2 + α3 = α6 − α5 X
A new Parodi-like relation
α2
α3=α4 + α5
α4 + α6= a3.

Discussion: comparison with MD
[21] D. Baalss and S. Hess, Z. Naturforsch. A 43, 662 (1988). [22] C.Wu, T. Qian, and P. Zhang, Liq. Cryst. 34, 1175 (2007).

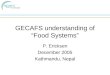
Discussion: comparison with experiments
Viscosity coefficients of
nematic MBBA as a function
of temperature: our
S-rescaled values (solid lines)
vs. experimental data from [*]
(dotted lines). Bottom x-axis:
inverse of absolute
temperature (mK−1); top
x-axis: temperature (◦C);
y-axis: logarithm of the
modulus of viscosities in Pa·s(all of them negative, except
α4 and α5).
[*] H. Kneppe, F. Schneider, and
N. K. Sharma, J. Chem. Phys.
77, 3203 (1982).

Acoustic approximation
small deformations:
u = εRe(aeiϕ(x,t)
),
ϕ(x, t) = k · x− ωt,
k = k + i`
nearly incompressible, weakly anisotropic (ρ0µ0 � ρ0p′(ρ0))
but any shear rate

Acoustic waves – results
Anisotropic speed of sound
vs = v0 + ηv0
[A
(0)0 +
4∑i=1
A(0)i
1 + (ωτi)2+
(A
(2)0 +
4∑i=1
A(2)i
1 + (ωτi)2
)cos(2θ)
+
(A
(4)0 +
4∑i=1
A(4)i
1 + (ωτi)2
)cos(4θ)
],
Anisotropic attenuation
`
ηk0=
4∑i=1
ωτi1 + (ωτi)2
(B
(0)i +B
(2)i cos(2θ)+B
(4)i cos(4θ)
)e
+
4∑i=1
ωτi1 + (ωτi)2
(C
(2)i sin(2θ) + C
(4)i sin(4θ)
)t,
with η = µ/v20 , e, unit vector in propagation direction, t, unit vectororthogonal to e, n.

Discussion: comparison with experimentsvel.
anisotropy
0 4 8 12 16
frequency [MHz]
1 ×10−3
2
Figure: Frequency dependence of thevelocity anisotropy. The solid linerepresents our fit with the fourrelaxation times. Experimental pointsare taken from Mullen et al., PRL1972.
0
0.2
0.4
attenuationanisotropy[dB/µ
s]
0 2 4 6 8
frequency [MHz]
Figure: Frequency dependence of theattenuation anisotropy. The solid linerepresents our theoretical estimate.Experimental points are taken fromLord and Labes, PRL 1970.

Active nematic gels


Active stress

Viscoelasticity

Recurrent themes in (simple) active models
1 Uniaxial symmetry and orientational order: like nematicliquid crystals.
2 Active stress: an extra-term in the Cauchy stress tensor
T(active) = −ζQ,
where Q is the nematic ordering tensor
Q =
⟨m⊗m− 1
3I
⟩,
with m the long-axis of the active sub-units.
3 Viscoelasticity: at short time-scales material is a polymer, atlong time-scales it is a fluid.

Some critiques
Brand, Pleiner, Svensek, EPJE, 2014: entropy production not adefinite sign. Time-reversal symmetry seems to imply that theactive stress is reversible.

Some critiques
Brand, Pleiner, Svensek, EPJE, 2014: entropy production not adefinite sign. Time-reversal symmetry seems to imply that theactive stress is reversible.
T is coupled with ∇v. Stress power vanishes in the absence ofmacroscopic flow. But there is chemical fuel consumption evenwhen v = 0. Analogy with models for muscles, isometricexercises.

Some critiques
Brand, Pleiner, Svensek, EPJE, 2014: entropy production not adefinite sign. Time-reversal symmetry seems to imply that theactive stress is reversible.
T is coupled with ∇v. Stress power vanishes in the absence ofmacroscopic flow. But there is chemical fuel consumption evenwhen v = 0. Analogy with models for muscles, isometricexercises.
Activity as a remodelling force

Constitutive assumptions/3: Activity
The shape tensor Ψ represents thenatural metric induced by thecoarse-grained anisotropy of thesubunits (i.e., cross-links betweenpolymer filaments define a naturaldistance)
Activity is an externalremodelling force, paired with theremodelling flow BO
e , that competeswith the passive remodelling.

Mathematical definitions
W (ext) :=
∫Pt
b · v dv +
∫∂Pt
t(ν) · v da+
∫Pt
g · n dv +
∫∂Pt
m(ν) · n da
+
∫Pt
Ta ·BOe dv,
Activity spends power against the remodelling velocity (and not themacroscopic velocity)
BOe := (Be)
.
− (∇v) Be −Be (∇v)T = F.
HFT .
K + F :=
∫Pt
(1
2ρv2 + ρσ(ρ,Be,n,∇n)
)dv,
D =
∫Pt
ξ dv, ξ ≥ 0,

Mathematical definitions
W (ext) :=
∫Pt
b · v dv +
∫∂Pt
t(ν) · v da+
∫Pt
g · n dv +
∫∂Pt
m(ν) · n da
+
∫Pt
Ta ·BOe dv,
Activity spends power against the remodelling velocity (and not themacroscopic velocity)
BOe := (Be)
.
− (∇v) Be −Be (∇v)T = F.
HFT .
K + F :=
∫Pt
(1
2ρv2 + ρσ(ρ,Be,n,∇n)
)dv,
D =
∫Pt
ξ dv, ξ ≥ 0,

Reduced dissipation - active
After some algebra . . .
D =
∫Pt
(Ta − ρ
∂σ
∂Be
)·BO
e dv ≥ 0.
Relaxation
D(BOe) + Ψ−1 −B−1e = Ta
Like in the passive case:
T = −p I + ρµ(Ψ−1Be − I
)− ρ(∇n)T
∂σ
∂∇n
h := ρ∂σ
∂n− div
(ρ∂σ
∂∇n
).

Small effective deformations
Be ≈ Ψ + B(1)e
To leading order, the Cauchy stress-tensor is
T = −ρ2 ∂σ∂ρ
I− 2D(ΨO)Ψ− ρ(∇n)T∂σ
∂∇n︸ ︷︷ ︸= “passive” NLCs
+ 2TaΨ.
An “active stress-like” appears
With the choice
Ta = −1
2ρµζI,
we essentially obtain a term comparable to the standard one.

Example: flow in a shallow channel
z
x
L θ(z)
vx(z)
vx(0) = 0
vx(L) = 0
θ(0) = 0
θ(L) = 0
ex ·div T = 0 + n×h = 0 ⇒ two eqns in θ(z), vx(z)
(Formally F (u, λ) = 0)
θ(z) = 0 and vx(z) = 0 is always a solution

Example: linear analysis
Bifurcations occur at λ = λc, where ker(DF (0, λc)) is non-trivial.
Bifurcation of the θ = vx = 0 solution occurs when
L
√a0
(a30 − 1)2
ζµ
k= 2nπ
We have two modes (dim ker(DF ) = 2)
θ(z) = A1 sin(nπz
L
)2+A2 sin
(n
2πz
L
)

Spontaneous flow (n = 1)
-1.0 -0.5 0.0 0.5 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x
z
θ(z)
0.0 0.2 0.4 0.6 0.8 1.0
-2
-1
0
1
2
z
θ(z)[°]
vx(z)
0.0 0.2 0.4 0.6 0.8 1.0
-0.15
-0.10
-0.05
0.00
z
v x(z)

Self-channelling (n = 1)
-1.0 -0.5 0.0 0.5 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x
z
θ(z)
0.0 0.2 0.4 0.6 0.8 1.0
0
1
2
3
4
5
z
θ(z)[°]
vx(z)
0.0 0.2 0.4 0.6 0.8 1.0
-0.06
-0.04
-0.02
0.00
0.02
0.04
0.06
z
v x(z)

Conclusions
X Inelastic evolution of natural configuration provides a theoreticalframework suited to model the interplay between microscopicrelaxation and macroscopic deformations
X Nematic liquid crystals as nematic elastomers with fast relaxingshear stresses. Viscolesticity is automatically included: NLCs asanisotropic viscoelastic fluids.
X Active behaviour fits nicely into this framework. Activity isintroduced as a remodelling force, coupled with theremodelling flow, instead of the macroscopic flow.
X Preliminary results on spontaneous flow andself-channelling.

Thank you!
S. S. Turzi, Active nematic gels as active relaxing solids, Phys.Rev. E 96, 052603 (2017).
S. S. Turzi, Viscoelastic nematodynamics, Phys. Rev. E 94,062705 (2016).
P. Biscari, A. DiCarlo, and S. S. Turzi, Liquid relaxation: A newParodi-like relation for nematic liquid crystals, Phys. Rev. E 93,052704 (2016).
S. S. Turzi, Elastic director vibrations in nematic liquid crystals,Eur. J. Appl. Math. 26, pp.93–107 (2015).
P. Biscari, A. DiCarlo, and S. S. Turzi, Anisotropic wavepropagation in nematic liquid crystals, Soft Matter 10,pp.8296–8307 (2014).