-
8/11/2019 Statisitics Summary Notes
1/18
Statistics of Measurement - Summary Handout
Dr Roberto Trotta
January 23, 2010
This is a summary of the notes I used for the 9 lectures course
Statistics of Measurementfor the 2nd year physics degree at
Imperial College London. While I hope the material will beuseful
for revision, you should not rely solely on it, but complement it
with your own notes from
the lectures (in particular, covering examples and derivations,
which are mostly omitted fromthis summary) and other textbook
sources.
Every effort has been made to correct any typos, but invariably
some will remain. I would begrateful if you could point them out to
me by e-mailing your corrections to: [email protected] list
oferrata corrigewill be posted and maintained on Blackboad.
Contents
1 Probabilities 2
2 Random variables, parent distributions and samples 3
3 Discrete probability distributions 3
4 Properties of discrete distributions: expectation value and
variance 6
5 Properties of continous distributions 8
6 The Gaussian (or Normal) distribution 9
7 The Central Limit Theorem 11
8 The likelihood function 11
9 The Maximum Likelihood Principle 13
10 Confidence intervals 15
11 Propagation of errors 16
12 Bayesian statistics 17
1
-
8/11/2019 Statisitics Summary Notes
2/18
2
1 Probabilities
Let A, B , C , . . . denote propositions (e.g., that a coin toss
gives tails). Let describethe sample space of the experiment, i.e.,
is a list of all the possible outcomes of theexperiment (for the
coin tossing example, ={T, H}, where T denotes tails and Hdenotes
head.
When the experiment is performed, the oucome O (e.g., coin lands
T) is selected withprobability
P(O) =n(O)
n (1)
where n(O) is the number of possibilities in favourable to O
andn is the total numberof possibilities in .
Frequentist definition of probability: The number of times an
event occurs divided by thetotal number of events in the limit of
an infinite series of equiprobable trials.
Thejoint probabilityofA and B is the probability ofA and B
happening together, and isdenoted by P(A, B).
The conditional probability ofA given B is the probability of A
happening given that Bhas happened, and is denoted by P(A|B).
The sum rule:P(A) + P(A) = 1, (2)
whereA denotes the proposition not A.
The product rule:P(A, B) =P(A|B)P(B). (3)
By inverting the order ofA andB we obtain that
P(B, A) =P(B|A)P(A) (4)
and because P(A, B) =P(B, A), we obtain Bayes theoremby equating
Eqs. (3) and (4):
P(A|B) = P(B|A)P(A)P(B)
. (5)
The marginalisation rule (follows from the two rules above):
P(A) =P(A, B1) + P(A, B2) + =i
P(A, Bi) =i
P(A|Bi)P(Bi), (6)
where the sum is over all possible outcomes for proposition B
.
Two propositions (or events) are said to be independentif and
only if
P(A, B) =P(A)P(B). (7)
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
3/18
-
8/11/2019 Statisitics Summary Notes
4/18
4
Figure 1: Left panel: uniform discrete distribution for n = 6.
Right panel: the correspondingcdf.
It is plotted in Fig. 1 alongside with its cdf for the case of
the tossing of a fair die ( n= 6).
The binomial distribution: the binomial describes the
probability of obtainingr suc-cesses in a sequence ofn trials, each
of which has probability p of success. Here, successcan be defined
as one specific outcome in a binary process (e.g., H/T, blue/red,
1/0, etc).The binomial distributionB (n, p) is given by:
P(r|n, p) B(n, p) = nr
pr(1 p)nr, (11)
where the choose symbol is defined asn
r
n!
(n r)!r! (12)
for 0 r n (remember, 0! = 1). Some examples of the binomial for
different choices ofn, p are plotted in Fig. 2.
The derivation of the binomial distribution proceeds from
considering the probability ofobtaining r successes in n trials
(pr), while at the same time obtaining n
r failures
((1p)nr). The combinatorial factor in front is derived from
considerations of thenumber of permutations that leads to the same
total number of successes.
The Poisson distribution: the Poisson distribution describes the
probability of thenumber of events in a process where events occur
with a fixed average rate and indepen-dently of each other. E.g.:
number of galaxies in the sky, number of murders in London,number
of planes landing at Heathrow, number of photons arriving at a
photomultiplier,etc.
Assume that it the probabilty of an event occuring per unit time
(with = constant.This is the definition of Poisson process!). The
probability ofr events happening in a time
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
5/18
5
Figure 2: Some examples of the binomial distribution, Eq. (11),
for different choices ofn, p, andits corresponding cdf.
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
6/18
6
t is given by the Poisson distribution:
P(r|, t) Poisson() =(t)r
r! et
. (13)Notice that this is a discrete pmf in the number of events
r, andnota continuous pdf in t(which is a fixed parameter). The
probability of getting r events in a unit time interval isobtained
from the above equation by setting t = 1.
The Poisson distribution of Eq. (13) is plotted in Fig. 3 as a
function ofr for a few choicesof (notice that in the figure t = 1
has been assumed, in the appropriate units). Thederivation of the
Poisson distribution follows from considering the probability of 1
eventtaking place in a small time interval t, then taking the limit
tdt0. It can alsobe shown that the Poisson distribution arises from
the Binomial in the limit pN forN .
4 Properties of discrete distributions: expectation value
andvariance
The discrete distributions above depend on parameters (such as p
for the Binomial, forPoisson), which control the shape of the
distribution. If we know the value of the param-eters, we can
deduce what we will observe when we obtain samples from the
distributionsvia the measurement process. This is the subject of
probability theory, which concernsitself with the theoretical
properties of the distributions. The inverse problem of
makinginductions about the parameters from the observed samples is
the subject of statisticalinference, addressed later.
Two important properties of distributions are the expectation
value (which controls thelocation of the distribution) and the
variance or dispersion(which controls how much thedistribution is
spread out). Expectation value and variance are functions of a
RV.
The expectation value E(X) (often called mean, or expected
value1) of the discreteRVX is defined as
E(X) = X i
xiPi. (14)
For example, for the tossing of a fair die (which follows the
uniform discrete distribution,Eq. (10)), the expectation value is
given by E(X) =
ii 16 = 21/6.
The variance or dispersionVar(X) of the discrete RV X is defined
asVar(X) E(X E(X))2 =E(X2) E(X)2. (15)
The square root of the variance is often called standard
deviation and is usually denotedby the symbol , so that Var(X) =2.
For the above example of die tossing, the varianceis given by
Var(X) =i
(xi X)2Pi=i
x2i Pi
i
xiPi
2=i
i21
6
21
6
2=
105
36 . (16)
1We prefer not to use the term mean to avoid confusion with the
sample mean.
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
7/18
7
Figure 3: Some examples of the Poisson distribution, Eq. (13),
for different choices of, and itscorresponding cdf.
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
8/18
8
For the Binomial distribution of Eq. (11), the expectation value
and variance are given by:E(X) =np, Var(X) =np(1
p). (17)
For the Poisson distribution of Eq. (13), the expectation value
and variance are given by:E(X) =, Var(X) =. (18)
5 Properties of continous distributions
As we did above for the discrete distribution, we now define the
following properties forcontinous distributions.
The expectation valueE(X) of the continous RV X is defined
as
E(X) = X xp(x)dx. (19) The variance or dispersionVar(X) of the
continous RV X is defined as
Var(X) E(X E(X))2 =E(X2) E(X)2 =
x2p(x)dx
xp(x)dx
2. (20)
The exponential distribution: the exponential distribution
describes the time one hasto wait between two consecutive events in
a Poisson process, e.g. the waiting time betweentwo radioactive
particles decays, or the time between cars passing by a certain
point on aroad, or (swapping time for length) the distance between
galaxies in the sky.
To derive the exponential distribution, one can consider the
arrival time of Poisson dis-tributed counts, for example the
arrival time of customers in a queue, then derive theprobability
density that the first person arrives at time t by considering the
probability(which is Poisson distributed) that nobody arrives in
the interval [0, t] and then that oneperson arrives during the
interval [t, t+ t]. Taking the limit t 0 it follows that
theprobability density for observing precisely 1 event at time t is
given by
P(1 event at time t|) = et, (21)where is the mean number of
events per unit time. This is the exponential distribution.
If we have already waited for a time s for the first event to
occur (and no event has
occurred), then the probability that we have to wait for another
time t before the firstevent happens satisfiesP(T > t + s|T >
s) =P(T > t). (22)
This means that having waited for time s without the event
occuring, the time we canexpect to have to wait has the same
distribution as the time we have to wait from thebeginning. The
exponential distribution has no memory of the fact that a time s
hasalready elapsed.
For the exponential distribution of Eq. (21), the expectation
value and variance are givenby
E(t) = 1/, Var(t) = 1/2. (23)
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
9/18
9
Figure 4: Two examples of the Gaussian distribution, Eq. (24),
for different choices of, , andits corresponding cdf. It is clear
that the expectation value controls the location of the pdf,while
controls its width.
6 The Gaussian (or Normal) distribution
The Gaussian pdf (often called the Normal distribution) is
perhaps the most importantdistribution. It is used as default in
many situations involving continous RV (the reasonbecomes clear
once we have studied the Central Limit Theorem, section 7). A
heuristicderivation of how the Gaussian arises follows from the
example of darts throwing (givenin the lecture).
The Gaussian pdf is a continous distribution with mean and
standard deviation isgiven by
p(x|, ) = 12
exp
1
2
(x )22
, (24)
and it is plotted in Fig. 4 for two different choices of{, }.
The Gaussian is the famousbell-shaped curve.
For the Gaussian distribution of Eq. (24), the expectation value
and variance are given by:
E(X) =, Var(X) =2. (25)
It can be shown that the Gaussian arises from the Binomial in
the limit n andfrom the Poisson distribution in the limit . As
shown in Fig. 5, the Gaussianapproximation to either the Binomial
or the Poisson distribution is very good even forfairly moderate
values ofn and.
The probability content of the Gaussian for a given symmetric
interval around the mean
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
10/18
10
Figure 5: Gaussian approximation to the Binomial (left panel)
and the Poisson distribution(right panel). The solid curve gives in
each case the Gaussian approximation to each pmf.
of widthon each side is given by
P( < x < + ) = +
12
exp
1
2
(x )22
dx (26)
=
2
1/2
0 expy2 dy (27)
= erf(1/
2), (28)
where the error functionerf is defined as
erf(x) = 2
x0
expy2 dy, (29)
and can be found by numerical integration (also often tabulated
and available as a built-infunction in most mathematical software).
Also recall the useful integral:
exp
1
2
(x )22 dx=
2. (30)
Eq. (26) allows to find the probability content of the Gaussian
pdf for any symmetricinterval around the mean. Some commonly used
values are given in Table 1.
In particular, the usual notation, e.g. for a measurement of a
temperature of the formT = (100 1) K, means that1 K is the 1
errorbar. This means that 68.4% of theprobability is contained
with1 K of the mean.
The discovery threshold in particle physics is traditionally set
at 5. This means thatone needs to have a probability in excess of 1
5.7 107 before being able to claim thediscovery of a new
effect.
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
11/18
11
P( < x < ) Usually callednumber of sigma Probability
content
1 0.683 12 0.954 23 0.997 34 0.9993 45 1 5.7 107 5
1.64 0.90 90% probability interval1.96 0.95 95% probability
interval2.57 0.99 99% probability interval3.29 0.999 99.9%
probability interval
Table 1: Relationship between the size of the interval around
the mean and the probabilitycontent for a Gaussian
distribution.
7 The Central Limit Theorem
The Central Limit Theorem (CLT) is a very important result
justifying why the Gaussiandistribution is ubiquitous.
Simple formulation of the CLT: Let X1, X2, . . . , X N be a
collection of independent RVwith finite expectation value and
finite variance 2. Then, for N , thir sum isGaussian distributed
with meanN and variance N 2.
Note: it does not matter what the detailed shape of the
underlying pdf for the individual
RVs is!Consequence: whenever a RV arises as the sum of several
independent effects (e.g., noisein a temperature measurement), we
can be confident that it will be very nearly
Gaussiandistributed.
More rigorous (and more general) formulation of the CLT: Let X1,
X2, . . . , X Nbe a col-lection of independent RV, each with finite
expectation value i and finite variance
2i .
Then the variable
Y =
Ni=1 Xi
Ni=1 iN
i=1 2i
(31)
is distributed as a Gaussian with expectation value 0 and unit
variance.
Proof: not required. Very simple using characteristic
functions.
8 The likelihood function
The problem ofinferencecan be stated as follows: given a
collection of samples, {x1, x2, . . . ,xN},and a generating random
process, what can be said about the properties of the
underlyingprobability distribution?
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
12/18
12
Figure 6: The likelihood function for the probability of heads
() for the coin tossing example.
Schematically, we have that:pdf - e.g., Gaussian with a given (,
) Probability of observation
Underlying (, ) Observed events(32)
The connection between the two domains is given by the
likelihood function.
Given a pdf or a pmf p(X|), where X represents a random variable
and a collectionof parameters describing the shape of the pdf
(e.g., for a Gaussian ={, }) and theobserved data x= {x1, x2, . . .
, xN}, the likelihood functionL (or likelihood for short) isdefined
as
L() = p(X=x|) (33)i.e., the probability, as a function of the
parameters , of observing the data that havebeen obtained. Notice
that the likelihood is nota pdf in .
Example: in tossing a coin, let be the probability of obtaining
heads in one throw.Suppose we make n = 5 flips and obtain the
sequence x= {H , T , T , T , T }. The likelihoodis obtained by
taking the Binomial, Eq. (11), and replacing for r the number of
headsobtained (r= 1) in n = 5 trials. Thus
L() =
5
1
1(1 )4 = 5(1 )4, (34)
which is plotted as a function of in Fig. 6.
This example leads to the formulation of the Maximum Likelihood
Principle (see below):if we are trying to determine the value of
given what we have observed (the sequence
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
13/18
13
of H/T), we should choose the value that maximises the
likelihood. Notice that this isnotnecessarily the same as
maximising the probability of . Doing so requires the use of
Bayes theorem, see section 12. A common problem is how to
estimate the mean and the standard deviation of a Gaussian.
Given a list of samples x={x1,x2, . . . , xN}, the estimator for
the (unknown) mean ofthe underlying Gaussian they are drawn from is
given by
x= 1N
Ni=1
xi, (35)
i.e., the sample mean. The law of large numbers implies that
limN
= . (36)
This means that for large samples, the estimated sample mean
converges to the true meanof the distribution. An estimator with
this property is said to be unbiased.
The estimator for the standard deviation of the Gaussian is
given by
2 = 1
N 1Ni=1
(xi x)2. (37)
Notice the 1/(N 1) factor in front, that ensures that the
estimator is unbiased. Indeedlim
N2 =2, (38)
i.e., the above estimator converges to the true value for a
large number of samples.
9 The Maximum Likelihood Principle
The Maximum Likelihood Principle(MLP): given the likelihood
function L() and seekingto determine the parameter, we should
choose the value of in such a way that the valueof the likelihood
is maximised. The Maximum Likelihood Estimator (MLE) for is
thus
ML max
L() (39)
Properties of the MLE: it is asymptotically unbiased (i.e., ML
for N ) and it isasymptotically the minimum variance estimator,
i.e. the one with the smallest errors.
To find the MLE, we maximise the likelihood by requiring its
first derivative to be zeroand the second derivative to be
negative:
L()
ML
= 0, and 2L()
2
ML
-
8/11/2019 Statisitics Summary Notes
14/18
14
Application of the MLP to a Gaussian likelihood: for N
independent samples from aGaussian distribution, the joint
likelihood function is given by
L() =p(x|) =Ni=1
12
exp
1
2
(xi )22
, (42)
where ={, } are the mean and standard deviation of the
distribution. Note: oftenthe Gaussian above is written as
L() = L0exp2/2 (43)
where the so-called chi-squared is defined as
2
=i
(xi
)2
2 . (44)
The MLE for the mean is obtained by solving
ln L
= 0 ML= 1N
Ni=1
xi, (45)
i.e., the MLE for the mean is just the sample mean that we
already encountered above.
The MLE for works out to be
ln L
= 0 2ML= 1NNi=1
(xi )2, (46)
which however is biased, because we have that E(2ML) = (1 1N)2 =
2 (for finite N).In order to obtain an unbiased estimator we
replace the factor 1/N by 1/(N 1). Also,because the true is usually
unknown, we replace it in Eq. (47) by the MLE estimator,ML. Thus an
unbiased estimator for the variance is
2 = 1
N 1Ni=1
(xi ML)2. (47)
MLE recipe:1. Write down the likelihood. This depends on the
kind of random process you are
considering.
2. Find the best fit value of the parameter by maximising the
likelihood L as a functionof . This is your MLE, ML.
3. Evaluate the uncertainty onML (see next section).
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
15/18
15
10 Confidence intervals
Consider a general likelihood function,
L() and let us expand ln
Laround its maximum:
ln L() = ln L(ML) + ln L()
ML
( ML) +12
2 ln L()2
ML
( ML)2 + . . . (48)
The second term on the RHS vanishes (by definition of the
Maximum Likelihood value),hence we can approximate the likelihood
as
L() L(ML)exp
12
( ML)22
, (49)
with1
2 =
2 ln L()2 ML
. (50)
So a general likelihood function can be approximated as a
Gaussian around its peak, asshown by Eq. (49).
Application: going back to the example given by the likelihood
of Eq. (42), we can usethe above result to estimate the width of
the likelihood function around the peak. Thisexpresses the
uncertainty in our estimation of the mean, Eq. (45). Applying Eq.
(50) tothe likelihood of Eq. (42) we obtain
2 = 2/N. (51)
(this result can also be derived directly by manipulating the
likelihood function). Thismeans that the standard deviation (i.e.,
the uncertainty) on our ML estimate for is
proportional to 1/
N, with Nbeing the number of measurements.
As the likelihood function can be approximated as a Gaussian (at
least around the peak),we can use the results for a Gaussian
distribution to approximate the probability contentof an interval
around the ML estimate for the mean. The interval [min, max] is
called a100% confidence intervalfor the mean ifP(min< < max)
=.
So, for example, the interval [ML < < ML+ ] is a 68.3%
confidence intervalfor the mean (a so-called 1 interval), while [ML
2 < < ML+ 2] is a 95.4%confidence interval (a 2
interval).
One has to be careful with the interpretation of confidence
intervals as this is often mis-understood! Interpretation: if we
were to repeat an experiment many times, and each
time report the observed 100% confidence interval, we would be
correct 100% of thetime. This means that (ideally) a 100%
confidence intervals contains the true value ofthe parameter 100%
of the time.
In a frequentist sense, it does not make sense to talk about the
probability of. Thisis because every time the experiment is
performed we get a different realization (differentsamples), hence
a different numerical value for the confidence interval. Each time,
eitherthe true value of is inside the reported confidence interval
(in which case, the probabilityof being inside is 1) or the true
value is outside (in which case its probability of beinginside is
0). Confidence intervals do not give the probability of the
parameter! In order todo that, you need Bayes theorem.
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
16/18
16
11 Propagation of errors
Suppose we have measured a quantity x obtaining a measurement
x
x
. How do wepropagate the measurement onto another variable y =
y(x)?
Taylor expanding y(x) around x we obtain:
y(x) y(x) + (x x) yx
x=x
+ . . . (52)
Truncating the expansion at linear order, the expectation value
ofy is given by:
E(y) =E(y(x)) +y
x
x=x
E(x x) = y(x) (53)
because E(x x) = 0.The variance ofy is given by:
V(y) = E([y(x) E(y(x))]2) =E([y(x) y(x)]2) =
y
x
x=x
22x. (54)
So the variance on y is related to the variance on x by
2y =
y
x
x=x
22x. (55)
Generalization to functions of several variables: ify = y(x1, .
. . , xN) then
2y =
Ni=1
yxi
x=x
22xi . (56)
Special cases:1. Linear relationship: y= ax. Then y = ax.
2. Product or ratio: e.g. y(x1, x2) =x1 x2 or y(x1, x2) =x1/x2.
Then2yy2
=2x1
x21+
2x2x22
. (57)
Systematic vs random errors: errors are often divided in this
two categories. Any mea-
surement is subject to statistical fluctuations, whice means
that if we repeat the samemeasurement we will obtain every time a
slightly different outcome. This is a statistical(or random) error.
Random errors manifest themeselves as noise in the
measurement,which leads to variability in the data each time a
measurement is made.
On the other hand, systematic errorsdo not lead to variability
in the measurement, butare the cause for data to be systematically
off all the time (e.g., measuring a current inA while the apparatus
really gives mA would lead to a factor of 1000 systematic error
allthe time). Systematic errors are usually more difficult to track
down. They might arise byexperimental mistakes, or because of
unmodelled (or unrecognized) effects in the systemyou are
measuring.
Statistics of Measurement cRoberto Trotta 2010
-
8/11/2019 Statisitics Summary Notes
17/18
17
12 Bayesian statistics
Bayes theorem, Eq. (5), encapsulates the notion of probability
as degree of belief. TheBayesian outlook on probability is more
general than the frequentist one, as the formercan deal with
unrepeatable situations that the latter cannot address.
We replace in Bayes theorem, Eq. (5), A (the parameters) and B d
(the observeddata, or samples), obtaining
P(|d) = P(d|)P()P(d)
. (58)
On the LHS, P(|d) is the posterior probability for (or posterior
for short), and itrepresents our degree of belief about the value
of after we have seen the data d.
On the RHS, P(d|) = L() is the likelihood we already
encountered. It is the probability ofthe data given a certain value
of the parameters. The quantity P() isthe prior
probabilitydistribution (or prior for short). It representes our
degree of b elief in the value of before we see the data. This is
an essential ingredient of Bayesian statistics. In thedenominator,
P(d) is a normalizing constant (often called the evidence), than
ensuresthat the posterior is normalized to unity:
P(d) =
dP(d|)P(). (59)
The evidence is important for Bayesian model selection (not
covered in this course).
Interpretation: Bayes theorem relates the posterior probability
for (i.e., what we knowabout the parameter after seeing the data)
to the likelihood. It can be thought of asa general rule to update
our knowledge about a quantity (here, ) from the prior tothe
posterior. A result known as Cox theorem shows that Bayes theorem
is the uniquegeneralization of boolean algebra in the presence of
uncertainty.
Remember that in generalP(|d) =P(d|) (see ex. of pregnant
woman), i.e. the posteriorand the likelihood are two different
quantities with different meaning!
Bayesian inference works by updating our state of knowledge
about a parameter (or hy-pothesis) as new data flow in. The
posterior from a previous cycle of observations becomesthe prior
for the next. The price we have to pay is that we have to start
somewhere byspecifying an initial prior, which is not determined by
the theory, but it needs to be given
by the user. The prior should represent fairly the state of
knowledge of the user about thequantity of interest. Eventually,
the posterior will converge to a unique (objective) resulteven if
different scientists start from different priors (provided their
priors are non-zero inregions of parameter space where the
likelihood is large). See Fig. 7 for an illustration.
There is a vast literature about how to select a prior in an
appropriate way. Some aspectsare fairly obvious: if your parameter
describes a quantity that has e.g. to be strictlypositive (such as
the number of photons in a detector, or an amplitude), then the
priorwill be 0 for values
-
8/11/2019 Statisitics Summary Notes
18/18
18
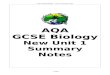
(a) (b) (c) (d)
Figure 7: Converging views in Bayesian inference. Two scientists
having different prior believesp() about the value of a quantity
(panel (a), the two curves representing two different
priors)observe one datum with likelihoodL() (panel (b)), after
which their posteriors p(|d) (panel
(c), obtained via Bayes Theorem, Eq. (5)) represent their
updated states of knowledge on theparameter. This posterior then
becomes the prior for the next observation. After observing 100data
points, the two posteriors have become essentially
indistinguishable (d).
A standard (but by no means trivial) choice is to take a uniform
prior (also called flatprior) on , defined as:
P() =
1(maxmin) for min max
0 otherwise (60)
With this choice of prior in Bayes theorem, Eq. (58), the
posterior becomes functionally
identical to the likelihood up to a proportionality
constant:
P(|d) P(d|) = L(). (61)
In this case, all of our previous results about the likelihood
carry over (but with a differentinterpretation). In particular, the
probability content of an interval around the mean forthe posterior
should be interpreted as a statement about our degree of belief in
the valueof (differently from confidence intervals for the
likelihood).
Under a change of variable, = (), the prior transforms according
to:
P() =P() dd. (62)
In particular, a flat prior on is no longer flat in if the
variable transformation isnon-linear.
Statistics of Measurement cRoberto Trotta 2010