Embed Size (px)
Citation preview
StarNavAdvanced CMOS Star Trackers:
enhanced accuracy, reliability and speed
John L. JunkinsTexas A&M University
May 16, 2002
May 16, 2002 GIFTS Software TIM, College Station, TX Slide No. 2
StarNav I, II, and III Advanced Star Tracker Systems
• The StarNav sensors combine novel hardware and software to establish a new generation of smart navigation sensors– Outputs 5 rad 3 axis accuracy
– Split field of views optics means one camera sees two orthogonal starfields simultaneously => cost reductions, accuracy improvements
– CMOS Active Pixel Sensor => rad. tolerance and high frame rates
– Fast/reliable star identification algorithm for lost in space (LIS) case, first algorithm capable of reliable LIS star ID for magnitude six stars in a small fraction of a second.
– Recursive on-orbit autonomous self-calibration => greatly enhanced reliability, autonomy and accuracy, esp. for long missions.
• StarNav I: Proof of Concept Experiment for STS 107 (July ’02)
• StarNav II: 10 HZ GIFTS Mission StarTracker (Circa 2003)
• StarNav III: 60HZ Gyroless Attitude and Rate Sensor (SLI)
May 16, 2002 GIFTS Software TIM, College Station, TX Slide No. 4
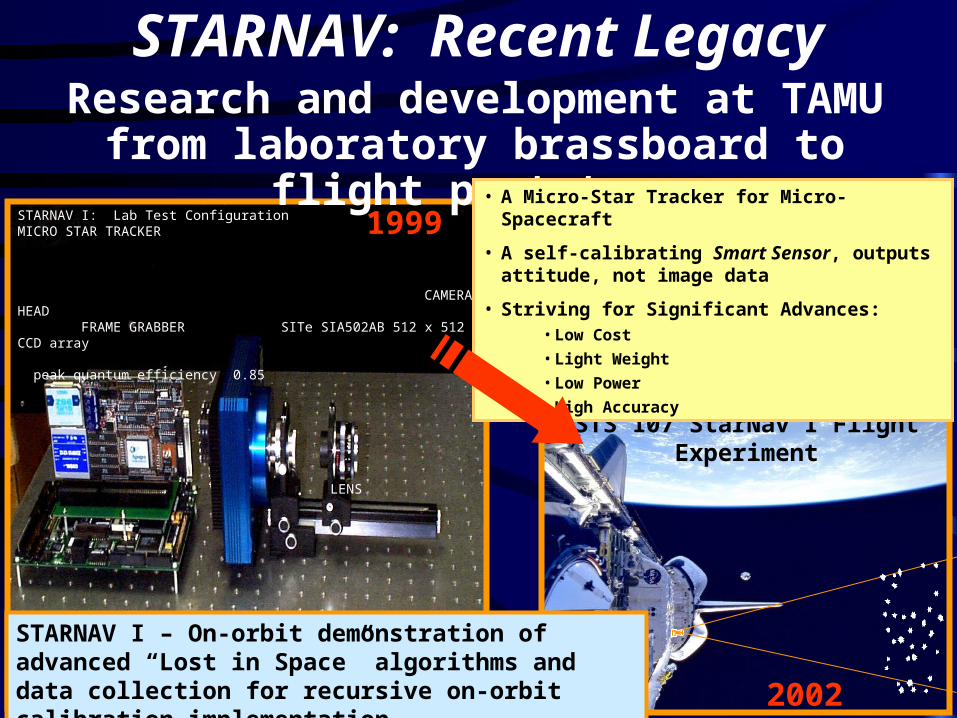
STARNAV: Recent Legacy
STARNAV I: Lab Test ConfigurationMICRO STAR TRACKER CAMERA HEAD FRAME GRABBER SITe SIA502AB 512 x 512 CCD array peak quantum efficiency 0.85
LENS
SINGLE BOARD COMPUTER 586-133, 32 Mb DRAM, 40 Mb FLASH
Research and development at TAMU from laboratory brassboard to flight prototype
1999
STS 107 StarNav I Flight Experiment
2002
STARNAV I – On-orbit demonstration of advanced “Lost in Space” algorithms and data collection for recursive on-orbit calibration implementation.
• A Micro-Star Tracker for Micro-Spacecraft
• A self-calibrating Smart Sensor, outputs attitude, not image data
• Striving for Significant Advances:• Low Cost
• Light Weight
• Low Power
• High Accuracy
May 16, 2002 GIFTS Software TIM, College Station, TX Slide No. 5
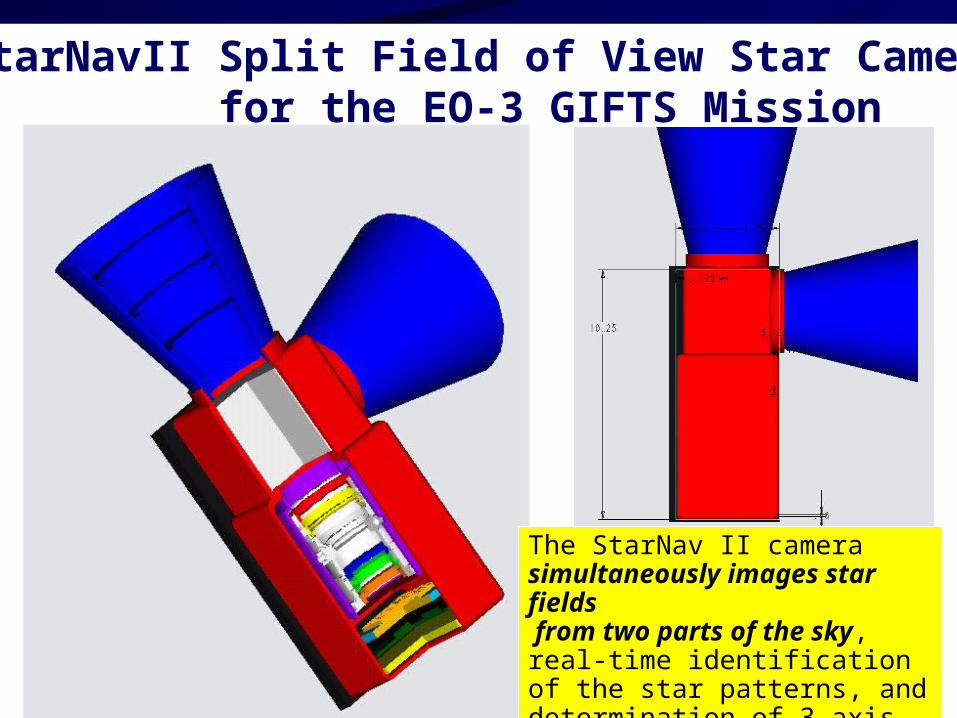
The StarNav II camera simultaneously images star fields from two parts of the sky, real-time identification of the star patterns, and determination of 3 axis attitude with a precision of 5 rad (1).
StarNavII Split Field of View Star Camera for the EO-3 GIFTS Mission
May 16, 2002 GIFTS Software TIM, College Station, TX Slide No. 6
FOV 1
FOV 2
Patents applied for.
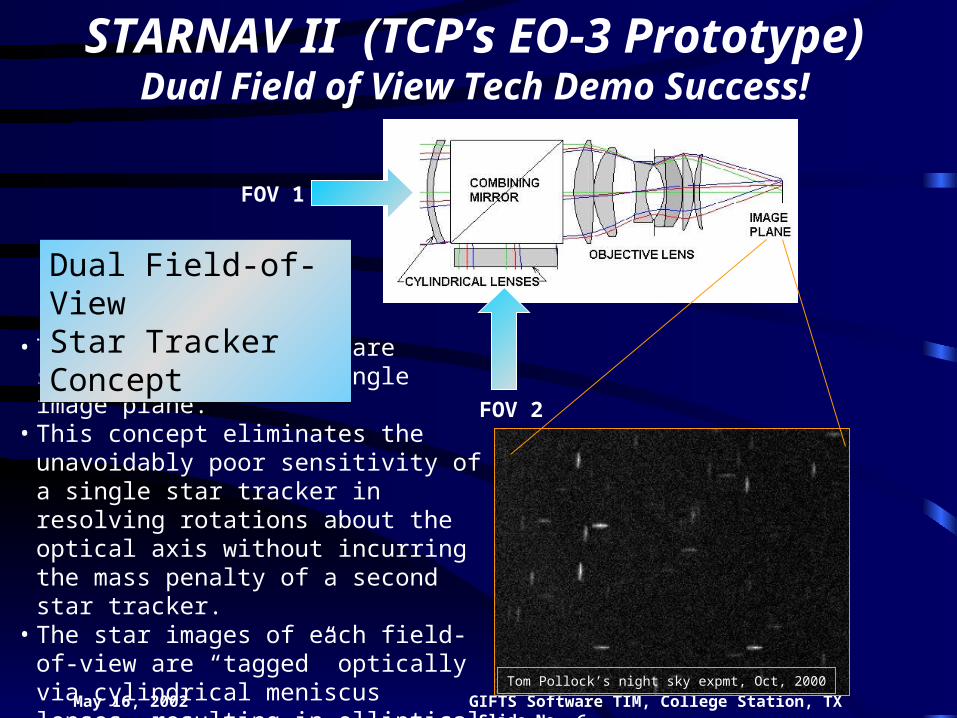
• Two star field images are superimposed onto a single image plane.
• This concept eliminates the unavoidably poor sensitivity of a single star tracker in resolving rotations about the optical axis without incurring the mass penalty of a second star tracker.
• The star images of each field-of-view are “tagged” optically via cylindrical meniscus lenses, resulting in elliptical star images. Spots are then sorted by shape to determine the FOV of origin.
Dual Field-of-ViewStar Tracker Concept
Tom Pollock’s night sky expmt, Oct, 2000
STARNAV II (TCP’s EO-3 Prototype)Dual Field of View Tech Demo Success!
May 16, 2002 GIFTS Software TIM, College Station, TX Slide No. 7
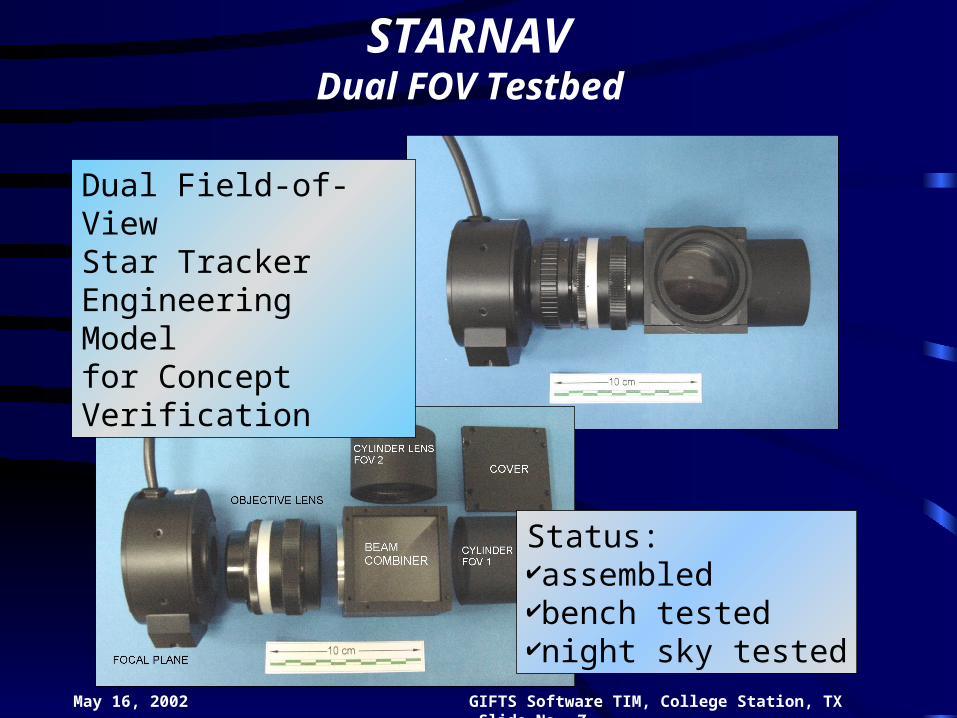
Dual Field-of-ViewStar TrackerEngineering Modelfor Concept Verification
Status: assembledbench testednight sky tested
STARNAV Dual FOV Testbed



