Embed Size (px)
Citation preview

DISCRETE AND CONTINUOUS doi:10.3934/dcdsb.2009.12.xxDYNAMICAL SYSTEMS SERIES BVolume 12, Number 1, July 2009 pp. 1–XX
STABILITY OF CONSTANT STATES AND QUALITATIVEBEHAVIOR OF SOLUTIONS TO A ONE DIMENSIONAL
HYPERBOLIC MODEL OF CHEMOTAXIS
Francesca Romana Guarguaglini
Dipartimento di Matematica Pura e Applicata
Universita degli Studi di L’Aquila
Via Vetoio, I–67100 Coppito (L’Aquila), Italy
Corrado Mascia
Dipartimento di Matematica “G. Castelnuovo”
Universita di Roma “La Sapienza”
Piazzale A. Moro, 2, I–00185 Roma, Italy
Roberto Natalini
Istituto per le Applicazioni del Calcolo “Mauro Picone”
Consiglio Nazionale delle Ricerche
c/o Department of Mathematics, University of Rome “Tor Vergata”Via della Ricerca Scientifica, 1; I-00133 Roma, Italy
Magali Ribot
Laboratoire J. A. Dieudonne
Universite de Nice-Sophia AntipolisParc Valrose, F-06108 Nice Cedex 02, France
(Communicated by Benoit Perthame)
Abstract. We consider a general model of chemotaxis with finite speed ofpropagation in one space dimension. For this model we establish a general
result of stability of some constant states both for the Cauchy problem on
the whole real line and for the Neumann problem on a bounded interval.These results are obtained using the linearized operators and the accurate
analysis of their nonlinear perturbations. Numerical schemes are proposed to
approximate these equations, and the expected qualitative behavior for largetimes is compared to several numerical tests.
1. Introduction. The term chemotaxis indicates the motion of a population drivenby the presence of an external (chemical) stimulus, specifically in response togradients of such substance, usually called chemoattractant. The basic feature ofsuch phenomena is the presence of concentration effects (chemotactic collapse),possibly leading to non-uniform pattern formation. A classical introduction to thesemodels is contained in [27]; a thorough and more recent overview of the subject canbe found in [34] and in [37]–[38].
2000 Mathematics Subject Classification. Primary: 35L60; Secondary: 35L50, 92B05, 92C17.Key words and phrases. Chemotactic movements, hyperbolic-parabolic systems, dissipativity,
finite speed of propagation, asymptotic behavior, global stability, numerical simulations, finite
differences.
1

2 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
From a mathematical point of view, the basic aim is to find thresholdsfor structure formation and to describe such structures. Predictions given bymathematical models should of course be compared with reality, always taking intoaccount that simplified chemotaxis models can describe only preliminary phases inaggregation phenomena. When a sufficiently large and complex structure is formed,new mechanisms appear and the model becomes no more adequate.
The basic unknowns in PDE models for chemotaxis models are the density ofindividuals of the population and the concentration of the chemoattractant. Thefirst and most celebrated model of these phenomena is the Patlak–Keller–Segelmodel (see [33, 25] or system (7) below). In this case, the basic assumption isthat dynamic of individuals is described by a parabolic equation coupled with anadditional equation for the chemoattractant, chosen to be elliptic or parabolic,depending on the different regimes to be described and on the taste of the authors.Chemotaxis appears as a cross–diffusion term in the equation for the population. Alarge amount of articles and studies analyzed the Patlak–Keller–Segel system. Fora complete review on the mathematical results see [17, 22, 34].
Existence of stationary solutions for the parabolic Keller–Segel model (togetherwith their stability and bifurcations) has been studied in [7] for the simplest modeland later generalized in [35] for more general chemotactic sensitive functions. Noticethat in two and three space dimensions it is well-known that solutions can blow-upin finite time, see again [22] and the more recent results in [5] and references therein.However in one space dimension the global existence of solutions for general initialdata has been shown by Osaki and Yagi [29], by using energy methods. Moreover,they have shown the existence of a global attractor under certain assumptions on thechemotactic sensitivities and the initial data, see also [19] for some refined results.Different models, taking in account realistic effect preventing overcrowding, canprovide global existence of solutions also in several space dimensions (see [18, 32]).
One of the problems of the diffusion models is that they imply an unrealisticinfinite speed of propagation of cells. This approximation can be accepted in somelarge time regimes, but it is usually just too rough to take into account the finestructure of the cell density for short times. To circumvent such flaw of the classicKeller–Segel model, models based on hyperbolic equations have been consideredstarting from the papers [36, 12]. In such chemotaxis models, the population isdivided in compartments depending on the velocity of propagation of individuals,giving raise to kinetic–type equations, either with continuous or discrete velocities.
The basic example of a discrete kinetic model for chemotaxis is∂tu+ ∂xv = 0,
∂tv + γ2∂xu = g(φ, ∂xφ)u− h(φ, ∂xφ)v,
∂tφ−D∂xxφ = f(u, φ).(1)
where γ,D > 0 and f, g, h are smooth functions satisfying suitable assumptions tobe introduced later on. System (1) has been first considered in [12] and generalizedin [21].
The derivation of macroscopic models (i.e. Patlak–Keller–Segel system) fromappropriate rescaled hyperbolic/kinetic equations has been considered in manyworks, see for instance [16, 21, 31, 6, 9, 13, 14, 24]), showing that, heuristically,hyperbolic models can be interpreted as a description of chemotaxis phenomena ata mesoscopic scale. While the literature on the Patlak–Keller–Segel model refersmainly to multidimensional problems, many papers on hyperbolic models deal with

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 3
the one-dimensional case, see [21, 13, 20, 23]. Multidimensional hyperbolic systemsfor chemotaxis are considered in [8, 14, 10], mostly from a numerical point ofview. More elaborated models have been introduced in [11, 26] in the frameworkof vasculogenesis modeling, with the choice of an Euler–type term v2/u + P (u) inplace of γ2u, arising from the assumption that closely packed cells show limitedcompressibility and generate a pressure-like term in the equations, see also [39, 1]for more details on this type of derivation. The analytical study in several spacedimensions for these hyperbolic models is far to be complete, and will be the objectof further studies.
In this paper, we want to perform an analytical study of problem (1), undervery general assumptions on the coefficients, with aim of improving on previousresults in [21, 20, 23], by determining sharp stability results of constant states, andinterpreting instability as the sign of a non–homogeneous pattern formation. Inparticular, we are able to remove the main assumptions in those papers, namelythat the functions h and g and the constant γ in (1) satisfy the inequality
γh(φ, ψ) ≥ |g(φ, ψ)|, for all φ, ψ ∈ R2. (2)
Although this assumption can be motivated for simple models by some microscopicprobabilistic arguments, at the macroscopic level it is just an artificial restrictionwith respect to more realistic models, see for instance [11, 26, 8], and also withrespect to the corresponding diffusion limit.
To remove this assumption, we proceed as follows. After a basic linear analysisof the operator (1), performed in Section 2, in Section 3 we give the proof of thestability of small perturbation of the zero state in the case of the Cauchy problemon the whole real line. First, using the accurate description of the Green functionfor the damped wave equation given in [3], we obtain sharp decay estimates for thelinearized operator. Therefore, by Duhamel’s principle, we are able to prove thestability result with (power) time decay estimates.
In Section 4, we consider the same system (1) on a bounded interval withNeumann boundary conditions. In this case, we are able to prove the exponentialtime decay of the linearized operator, which, in turn, yields a stronger stabilityresult, namely the global existence and decay of solutions corresponding to smallperturbations of all stationary constant states which are set in the region of stabilitygiven by the linear analysis, see Section 2 below.
The analysis is complemented with numerical experiments with the final goal ofunderstanding qualitative properties of the system, even in regimes where a rigorousanalysis is still not available. First, in Section 5, we give some details about thewhole set of stationary solutions of system (1) and what is known of their stability.Some numerical bifurcation diagrams of steady states are displayed. In Section 6, weintroduce two explicit-implicit numerical schemes to approximate system (1), for thebounded interval, with Neumann boundary conditions. The second one is speciallydesigned to preserve the asymptotic profiles, much in the spirit of [2]. Thanks tothese approximations we are able to present in Section 7, accurate numerical resultsabout the asymptotic behavior of solutions of (1). This behavior strongly dependson the mass of initial data u0 and on the eventual symmetries of initial functionsu0 and φ0. We explore the stability of the first few branches of bifurcation of thestationary solutions, also making an accurate comparison with the behavior of thecorresponding diffusion model.

4 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
2. The one dimensional discrete kinetic model. Many species alternateperiods of straight movements in a fixed direction with others during which a newdirection is chosen, as a consequence of presence of some attracting or repellingchemical. A simple one-dimensional model describing such combination of behaviorsis given by the following hyperbolic-parabolic system
∂tu+ + γ ∂xu
+ = −µ+(φ, ∂xφ)u+ + µ−(φ, ∂xφ)u−,
∂tu− − γ ∂xu
− = µ+(φ, ∂xφ)u+ − µ−(φ, ∂xφ)u−,
τ∂tφ = D∂xxφ+ f(u+ + u−, φ),
(3)
which is strongly inspired by the Goldstein–Kac model for correlated random walks.Such kind of models were originally considered in [36], and later reconsidered in[12]. More recently, some generalizations of these models have been considered in[21, 20, 15, 23].
Functions u± denote the densities of the right/left moving part of the totalpopulation and φ is the external chemotactic stimulus biasing the movement ofthe population itself. Here, parameters γ, τ,D are assumed to be strictly positiveconstants. They represent, respectively, characteristic speed of propagation of u±,time-scale for the dynamics and diffusion coefficient for the chemoattractant. Afterrescaling of D and f , we can set τ = 1. The terms µ± are called turning rates andthey control the probability of transition from u+ to u− and vice versa, i.e. thechange of direction in the movement of a single individual. As a consequence, theyare assumed to be functions of φ and ∂xφ, i.e. µ± = µ±(φ, ∂xφ). The functionf describes the production/degradation of the chemoattractant. Details on thespecific form of µ± and f will be given later on.
Introducing the two moments
u := u+ + u−, v := γ(u+ − u−),
the system (3) takes the form∂tu+ ∂xv = 0,
∂tv + γ2 ∂xu = g(φ, ∂xφ)u− h(φ, ∂xφ) v,
∂tφ−D∂xxφ = f(u, φ).(4)
where g = g(φ, ψ) := γ(µ−(φ, ψ) − µ+(φ, ψ)
)and h = h(φ, ψ) := µ−(φ, ψ) +
µ+(φ, ψ).Assuming additionally h ≡ 1 and formally disregarding the term ∂tv in the second
equation of (4), the system reduces to the Keller–Segel parabolic system{∂tu− γ2 ∂xxu+ ∂x (g(φ, ∂xφ)u) = 0,
∂tφ−D∂xxφ = f(u, φ).(5)
To deal with both the original Keller–Segel system (5) and hyperbolic system (4),let us rewrite this system as
∂tu+ ∂xv = 0,
δ∂tv + γ2 ∂xu = g(φ, ∂xφ)u− h(φ, ∂xφ) v,
∂tφ−D∂xxφ = f(u, φ),(6)
with δ ≥ 0.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 5
Remark 1. Assuming again h(φ, ψ) ≡ 1, the first two equations in (6) can berewritten as a single second order nonlinear wave equation for u{
∂tu+ δ ∂ttu− γ2 ∂xxu+ ∂x(g(φ, ∂xφ)u
)= 0,
∂tφ−D∂xxφ = f(u, φ).(7)
The Keller–Segel system (5) is again recovered for δ = 0.
Next we want to find some reasonable assumptions on functions g and h, recallingthat µ± describes the rate of transition from population u± to u∓ and that suchtransition is driven by the presence of a gradient of the chemoattractant φ.
Following [12], we can choose µ± to be affine functions of ∂xφ; for instance wecan take
µ±(φ, ψ) =12
(1∓ χ(φ)
γψ
), (8)
where χ = χ(φ) > 0 is a smooth function. This choice corresponds to
g(φ, ψ) = χ(φ)ψ, h(φ, ψ) = 1,
which in the parabolic limit δ = 0 of equation (5), just coincides with the classicalKeller-Segel system.
Coming back to our general framework, let us assume for the moment only
g(φ, 0) = 0, h(φ, 0) > 0, ∀φ. (9)
These assumptions reflect the fact that, in the absence of gradients ofchemoattractant, the rate of transition from state u± to u∓ is the same and thatsome transition is always occurring.
Remark 2. It is meaningful to assume that functions g and h are such thatthe system (6) is invariant with respect to the transformation (x, t, u, v, φ) 7→(−x, t, u,−v, φ). Such invariance has to be interpreted as a “one-dimensionalrotational invariance”. This amounts in requiring
g(φ,−ψ) = −g(φ, ψ), h(φ,−ψ) = h(φ, ψ) ∀φ, ψ. (10)
In terms of the turning functions µ±, (10) corresponds to the relation
µ+(φ, ψ)− µ−(φ, ψ) = µ−(φ,−ψ)− µ+(φ,−ψ) ∀φ, ψ.Hence, if µ± are assumed to be non-negative, then condition (10) is equivalent tothe symmetry condition µ±(φ, ψ) = µ∓(φ,−ψ), considered in [21, 20, 23].
If assumption (9) holds, system (6) has constant solutions of the form
(u, v, φ) = (U, 0,Φ) with Φ such that f(U,Φ) = 0.
We are interested in determining critical parameters for stability/instability ofsuch states. In particular, transition from stability to instability is expected tobe an indicator of the presence of non constant solutions, bifurcating from constantsolutions. Linearizing system (6) at the constant steady state (U, 0,Φ), we obtain
∂tu+ ∂xv = 0,
δ∂tv + γ2 ∂xu− χU ∂xφ+ β v = 0,∂tφ−D∂xxφ+ bφ− au = 0.
(11)
where h(Φ, 0) = β > 0 by (9), ∂uf(U,Φ) = a, ∂φf(U,Φ) = −b, ∂ψg(Φ, 0) = χ.Assume
γ, χ, a > 0, δ,D, b ≥ 0, (D, b) 6= (0, 0).

6 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
By rescaling variables, we could reduce the number of parameters. However, weprefer to keep all of them, in order to determine limiting behavior when one ormore of such parameters are assumed to be negligible.
Remark 3. When considering system of the general form (1) under the assumption∂vF (U, 0) = 0 (satisfied by the Euler type model), the linearized equations have theform given in (11) with γ2 = P ′(U). Hence the analysis we perform in what followsfor the linearized stability holds also in that case. Linear stability analysis for theEuler type model has been performed in [26] assuming the presence of a viscosityterm in the equation for the momentum v.
Remark 4. The linearized system (11) has the invariance described in Remark 2,regardless of the specific choice of g and h. It possesses also additional invariances,due to the linear structure of the problem. As an example, the system remainsunchanged when applying the transformation (x, t, u, v, φ) 7→ (−x, t,−u, v,−φ).Such invariance has no specific counterpart at the level of the nonlinear problem(it would correspond to a transformation of the form (x, t, u, v, φ) 7→ (−x, t, U −u, v,Φ− φ) with no special physical meaning).
The dispersion relation of (11) is given by
p(λ, k) := det
λ ik 0iγ2 k δλ+ β −iχU k−a 0 λ+ b+Dk2
= δλ3 + a2 λ2 + a1 λ+ a0 (12)
where a0 := (bγ2 − aχU)k2 +Dγ2 k4
a1 := β b+ (β D + γ2)k2,
a2 := β + δ b+ δ D k2.
Next, we want to determine stability/instability conditions on the state (U, 0,Φ).Such conditions can be derived by analyzing, for any k the values λ such p(λ, k) = 0.
First of all, we compose the Routh–Hurwitz array for δ > 0:
s3 δ a1 0s2 a2 a0 0s1 b1 0 0s0 c1 0 0
(13)
where
b1 :=a1a2 − δa0
a2=β b(β + δb) +
[β(β D + γ2) + δ(2b β D + aχU)
]k2 + β δD2 k4
β + δ(b+Dk2),
c1 :=a0 b1b1
= a0 = (bγ2 − aχU)k2 +Dγ2 k4.
By the Routh–Hurwitz criterion (see for instance [27], vol. I, Appendix B.1), all ofthe eigenvalues λ = λ(k) have negative real parts if and only if the elements of thefirst column in the array (13) are positive. By (9), β > 0. Assuming b > 0, thestability condition is satisfied if a0 > 0, i.e. if, for any k under consideration, thereholds
U <γ2(b+Dk2)
aχ.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 7
In the case of the Cauchy problem, k spans all over R \ {0} and the conditionbecomes
U <b γ2
aχ. (14)
To compare with the Keller–Segel system, it is interesting to consider the caseδ = 0. Then a2 = β and the Routh–Hurwitz array is
s2 β a0 0s1 a1 0 0s0 d1 0 0
(15)
whered1 :=
a0a1
a1= a0 = (bγ2 − aχU)k2 +Dγ2 k4
and the stability condition is the one obtained in the case δ > 0 for b ≥ 0.When k takes values arbitrarily close to 0 (as in the case of the Cauchy problem),
it is interesting to find expansions for k → 0. For k = 0, there holds
p(λ, 0) = δ λ3 + (β + δ b)λ2 + β b λ = λ(δ λ2 + (β + δ b)λ+ β b
).
As a consequence, if b > 0, there is only one branch λ = λ(k) such that λ(0) = 0for both δ > 0 and δ = 0. Such branch has a second-order expansion that isindependent of δ and it has a parabolic scaling
λ(k) = − 1β
(γ2 − aχU
b
)k2 + o(k2) k → 0.
For large frequencies, the behavior for δ = 0 differs from the one with δ > 0. Indeed,looking for the expansion for the three branches λ = λ(k) as k →∞, we get
λhyp
0 (k) = −Dk2 − b+ o(1), λhyp
± (k) = ± iγδk − β
2δ+ o(1).
In the case δ = 0, p degenerates to a polynomial of degree two. For γ2/β 6= D,asymptotic expansions for the corresponding branches are
λKS
0 (k) = −Dk2 − b+aχU
γ2 − β D+ o(1), λ
KS
1 (k) = −γ2
βk2 − aχU
γ2 − β D+ o(1).
Such expansions show that, while for the hyperbolic model, it is expected thepresence of (decaying) Dirac’s delta terms in the fundamental solutions, in theKeller–Segel system solutions to linearized problem are smoothed by the presenceof diffusion in both equations.
3. The Cauchy problem: Stability of the zero solution. The aim of thissection is to investigate existence of global solutions to the Cauchy problem on thewhole real line for system (1), in the caseD > 0, and their decay to zero, when initialdata are sufficiently small in some suitable norms. Let us remark immediately thatwe are not able to prove the stability of general constant states under the broaderassumption (14). Additional comments are given in Remark 6 below.
A sharp result of local existence of solutions is crucial for our proof; for thisreason, although the proof is rather standard, this result is presented below. By asimple rescaling, it is possible to symmetrize the transport matrix and to deal withsystem (1) with γ = 1. Moreover, we assume f, g, h ∈ C1(R2) and we consider theinitial conditions
u(x, 0) = u0(x) , v(x, 0) = v0(x) , φ(x, 0) = φ0(x) , (16)

8 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
with the regularity assumptions
u0, v0 ∈ L∞(R), φ0 ∈W 1,∞(R) . (17)
Let us set ‖w‖p = ‖w‖Lp(R×(0,t)) and ‖w(t)‖p = ‖w(t)‖Lp(R).
Theorem 3.1. There exists t1 > 0, depending on the initial data, such that problem(1), (16), (17) has a unique local solution
u, v ∈ L∞(R× (0, t1)) , φ ∈W 1,∞(R× (0, t1)) .
Proof. Let φ0 ∈ W 1,∞(R × (0,+∞)) such that ‖φ0‖1,∞ ≤ K. Let us consider thehyperbolic part of the system in its diagonal form (3) (with γ = 1) with φ replacedby φ0. There exists a unique broad global solution (u1+, u1−) (see [4]), which canbe expressed as
u1+(x, t) = u+0 (x− t) +
∫ t
0
(−µ+(φ0, ∂xφ0)u1+ + µ−(φ0, ∂xφ
0)u1−) ds ,
u1−(x, t) = u−0 (x+ t) +∫ t
0
(µ+(φ0, ∂xφ0)u1+ − µ−(φ0, ∂xφ
0)u1−) ds ,
for a.e. (x, t) ∈ R× (0,∞). Setting
M∞ := max{|µ+(φ, ∂xφ)|+ |µ−(φ, ∂xφ)| : ‖φ‖1,∞ ≤ K},we have
‖u1+‖∞ + ‖u1−‖∞ ≤ ‖u0‖∞ + ‖v0‖∞ + tM∞(‖u1+‖∞ + ‖u1−‖∞),
which, for t ≤ t0, t0 = t0(K), leads to
‖u1‖∞ + ‖v1‖∞ ≤ K := 4(‖u0‖∞ + ‖v0‖∞) .
Given d > 0, let Γd(x, t) := 12√πdt
e−x2/4dt be the standard kernel for the heat
equation with diffusion coefficient d; let φ1 ∈ W 1,∞((0, t0) × R) be the solution tothe Cauchy problem for the parabolic equation ∂tφ = D∂xxφ+ f(u1, φ0), i.e.
φ1(x, t) = ΓD(t) ∗ φ0 +∫ t
0
ΓD(t− s) ∗ f(u1(s), φ0(s)) ds . (18)
By the above expression we have
‖φ1‖∞ ≤ ‖φ0‖∞ + tF∞ , ‖∂xφ1‖∞ ≤ ‖∂xφ0‖∞ + C√tF∞ ,
where F∞ := max{f(u, φ) : ‖u‖∞ ≤ K, ‖φ‖∞ ≤ K}; then, for t ≤ t1 ≤ t0,t1 = t1(K, K),
‖φ1‖1,∞ ≤ 2‖φ0‖1,∞ .
Setting K = 2‖φ0‖1,∞, we can construct a sequence (un, vn, φn) ∈ (L∞(R ×(0, t1)))2 ×W 1,∞(R× (0, t1)), which takes the initial data (16)-(17) and, for t ≤ t1,verifies
‖un‖∞ + ‖vn‖∞ ≤ K, ‖φn‖1,∞ ≤ K.
We obtain the result if we prove that the map Σ : (un, vn, φn) 7→(un+1, vn+1, φn+1) := Σ(un, vn, φn) is a contractive map over the space
{(u, v, φ) : ‖u‖∞ + ‖v‖∞ ≤ K, ‖φ‖1,∞ ≤ K in R× (0, t) and (16) holds},
at least for small values of t. Let (u, v, φ) = Σ(z, w, σ) and (u, v, φ) = Σ(z, w, σ)and let Q := [0,K]× [0,K]; then, for t ≤ t1,
‖u±− u±‖∞ ≤ Ct(‖g‖C1 + ‖h‖C1 + K)(‖u+− u+‖∞ + ‖u−− u−‖∞ + ‖σ− σ‖1,∞),

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 9
‖φ− φ‖∞ ≤ Ct‖f‖C1 (‖u− u‖∞ + ‖σ − σ‖∞) ,
‖∂xφ− ∂xφ‖∞ ≤ C√t‖f‖C1 (‖u− u‖∞ + ‖σ − σ‖∞) .
where ‖·‖C1 = ‖·‖C1(Q). Hence, for small t, the contraction property of Σ holds.
Remark 5. It is easy to show that, assuming regularity on initial data, we obtainregular solutions; in particular, if u0, v0 ∈ Ck(R) and φ0 ∈ Ck+1(R), for k ∈ N,then u, v ∈ Ck(R× [0, t)) and φ ∈ Ck+1(R× [0, t)) (see [4]).
Next, we prove existence of global solutions by using a continuation principle.
Theorem 3.2. Let T < ∞ be the maximal time of existence for a local solution(u, v, φ) to system (1), (16), (17). Then ‖φ‖W 1,∞(R×(0,t)) → +∞ as t ↑ T .
Proof. If ‖φ‖W 1,∞(R×(0,T )) is bounded, then, by arguing as in the proof of localexistence, the same holds for ‖u‖L∞(R×(0,T )) and ‖v‖L∞(R×(0,T )).
Let K := max{‖φ‖W 1,∞(R × (0, T )), ‖u‖L∞(R×(0,T )), ‖v‖L∞(R×(0,T ))} and letε > 0 be the maximal time of existence for solutions of the Cauchy problem (1),(16),(17) with ‖u0‖∞, ‖v0‖∞, ‖φ0‖1,∞ ≤ K. Then there exists t ∈ (T − ε
2 , T ) suchthat we can consider the functions u(x, t), v(x, t) ∈ L∞(R) and φ(x, t) ∈ W 1,∞(R)as initial data for a Cauchy problem with maximal time of existence T ≥ ε.
To prove the global existence of solutions for small initial data, we make someassumptions on the functions f, g, h
(Hf): f ∈ C2(R2) and a := ∂zf(0, 0) > 0, b := −∂wf(0, 0) > 0;(Hg): g ∈ C1(R2) and g(0, 0) = 0;(Hh): h ∈ C1(R2) and β := h(0, 0) > 0;
Setting
f(z, w) := f(z, w)− az + bw and h(z, w) := h(z, w)− β,
we are led to consider the system∂tu+ ∂xv = 0
∂tv + ∂xu+ β v = g(φ, ∂xφ)u− h(φ, ∂xφ)v
∂tφ = D∂xxφ+ au− bφ+ f(u, φ) .
(19)
This system is supplemented by the initial conditions
u0, v0 ∈ L∞(R) ∩ L1(R) , φ0 ∈W 1,∞(R) ∩ L2(R) . (20)
As a consequence of (Hg), (Hh), (Hf ), for any K > 0, there exist GK ,HK , FK >0 such that, for all z, w ∈ [−K,K]
|g(z, w)| ≤ GK |(z, w)|, |h(z, w)| ≤ HK |(z, w)|, |f(z, w)| ≤ FK |(z, w)|2
The proof of the global existence of solutions is built up on the precise decayestimates obtained in [3] for the Green function of the linearization of the hyperbolicpart of (19). For this reason, we need some estimates, involving the decay in time ofL∞ and L2 norms of solutions. Given α > 0, we introduce the following quantities
Mαw(t) := sup
(0,t)
{max{1, sα}‖w(s)‖2} , Nαw(t) := sup
(0,t)
{max{1, sα}‖w(s)‖∞} .
We collect the estimates referred to function φ in the following proposition.

10 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Proposition 1. Let (u, v, φ) be the solution to problem (19)-(20),under assumptions (Hg), (Hh) and (Hf ); let K,T > 0 such that, for t ∈ (0, T ),‖u‖∞, ‖φ‖∞, ‖∂xφ‖∞ ≤ K. Then, for t ∈ (0, T ),
N14φ (t) ≤ C
(‖φ0‖∞ + (1 +KFK)
(M
14u (t) +M
14φ (t)
))(21)
N14∂xφ
(t) ≤ C(‖∂xφ0‖∞ + (1 +KFK)
(M
14u (t) +M
14φ (t)
))(22)
M14∂xφ
(t) ≤ C(‖∂xφ0‖∞ + ‖φ0‖2 + (1 +KFK)
(M
14u (t) +M
14φ (t)
)). (23)
Moreover, if K is sufficiently small, then we have
M14φ (t) ≤ C
(‖φ0‖2 + (1 +KFK)M
14u (t)
). (24)
Proof. For the function φ the following expression holds
φ(x, t) = e−btΓD(t) ∗ φ0 +∫ t
0
e−b(t−s)ΓD(t− s) ∗ (au(s) + f(u(s), φ(s))) ds. (25)
For future references, we recall that the heat kernel Γd and its derivatives satisfy
‖Γd(t)‖2 ≤ Ct−14 , ‖∂xΓd(t)‖2 ≤ Ct−
34 , ‖∂xxΓd(t)‖2 ≤ Ct−
54 . (26)
As a consequence, by properties of function f and (26), we have
‖φ(t)‖∞ ≤ e−bt‖φ0‖∞ + (M14u (t) +M
14φ (t))(1 + 2KFK)
∫ t
0
e−b(t−s)
(t− s)14
min{1, s− 14 } ds.
Now, by standard inequalities (see for instance [3], Lemma 5.2) we have∫ t
0
e−b(t−s)
(t− s)14
min{1, s− 14 } ds ≤ Cmin{1, |t− 1|− 1
4 }
and (21) follows. By using (25), we also obtain
‖φ(t)‖2 ≤ e−bt‖φ0‖2 +∫ t
0
e−b(t−s)‖ΓD(t− s)‖1‖au(s) + f(u(s), φ(s))‖2 ds
and by arguing as above we obtain the inequality
M14φ (t) ≤ C
(‖φ0‖2 + (1 +KFK)M
14u (t) +KFKM
14φ (t)
)which, for small K, yields (24).
Inequalities (22)–(23) can be proved similarly by differentiating (25).
Next, let G : R2 → R2×2 be the Green kernel of the dissipative hyperbolicsystem {
∂tu+ ∂xv = 0∂tv + ∂xu+ βv = 0.
In [3] it is proved that G can be decomposed as follows, denoting by χI
thecharacteristic function of the set I,
G(x, t) = Kpχ{−t≤x≤t,t≥1} +Kh +R(x, t)χ{−t≤x≤t}
whereKp11 = Γ
1β , Kp12,K
p21 =
1β∂xΓ
1β , Kp22 =
1β2∂xxΓ
1β ,
|Khij | ≤ C(δ(x− t) + δ(x+ t))e−ct (27)

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 11
andR11 = O(1) (1 + t)−1 e−
x2ct , R22 = O(1) (1 + t)−2 e−
x2ct , (28)
R12 , R21 = O(1) (1 + t)−32 e−
x2ct , (29)
for some suitable values of the constants.Assuming φ ∈W 1,∞((0, T );L2(R))∩W 1,∞(R× (0, T )) to be given, we can write
the components (u, v) of the solution of (19) by means of the Duhamel formulas andtake advantage of the previous estimate to prove the existence of global solutionsto system (19), for suitably small initial data.
Theorem 3.3. Under assumptions (Hf ), (Hg), (Hh) there exists ε0 > 0 such that,if
‖u0‖∞, ‖v0‖∞, ‖u0‖1, ‖v0‖1, ‖φ0‖1,∞, ‖φ0‖2 ≤ ε0
then there exists a unique global solution to the Cauchy problem (19)-(20) satisfying
u, v ∈ L∞(R× (0,+∞)) ∩ L∞((0,+∞);L1(R))
φ ∈W 1,∞(R× (0,+∞)) ∩W 1,∞((0,+∞);L2(R)) .
Moreover, all of the quantities M14u , M
12v , M
14φ , M
14∂xφ
, N14u , N
12v , N
14φ and N
14∂xφ
areuniformly bounded for t ∈ (0,+∞).
Proof. Fix K > 0 large enough and let T > 1. Consider a solution to system (19)such that ‖u, v, φ, ∂xφ‖L∞(R×(0,T )) ≤ K
2 . By representing u thanks to Duhamelformula relative to the hyperbolic part of system (19), we obtain
‖u(t)‖2 ≤ C(min{1, t− 1
4 }‖u0‖1 + min{1, t− 34 }‖v0‖1 + e−ct(‖u0‖2 + ‖v0‖2)
)+ C
∫ t
0
min{1, (t− s)−34 } (‖φ‖2 + ‖∂xφ‖2) (GK‖u‖2 +HK‖v‖2) ds
+ C
∫ t
0
e−c(t−s) (‖φ‖∞ + ‖∂xφ‖∞) (GK‖u‖2 +HK‖v‖2) ds ,
(30)having used the expressions for Gij , the bounds for |Rij |, and (26). By Proposition1, the first integral in (30), denoted below by I1, can be estimate by
I1 ≤ C((1 +KFK)‖φ0‖2 + ‖∂xφ0‖∞ + (1 +KFK)2M
14u
)×
(GKM
14u +HKM
12v
) ∫ t
0
min{1, (t− s)−34 }min{1, s− 1
2 } ds .
where Mu and Mv are calculated at time t. By Lemma 5.2 in [3] we obtain
I1 ≤ Ct−14
((1 +KFK)‖φ0‖2 + ‖∂xφ0‖∞ + (1 +KFK)2M
14u
) (GKM
14u +HKM
12v
).
Next, considering the second integral in (30), denoted by I2, we obtain
I2 ≤ Cmin{1, t− 14 }
((1 +KFK)‖φ0‖2 + ‖∂xφ0‖∞ + ‖φ0‖∞ + (1 +KFK)2M
14u
)×
(GKM
14u +HKM
12v
).
Finally, for t > δ > 0, there holds
M14u ≤ C
(D00 + (D01 + (1 +KFK)2M
14u )
(GKM
14u +HKM
12v
)), (31)

12 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
where D00 = ‖u0‖1+‖v0‖1+‖u0‖2+‖v0‖2 and D01 = (1+KFK)‖φ0‖2+‖∂xφ0‖∞+‖φ0‖∞ and Mu and Mv are calculated at time t.
The next step is the estimate of Nu; taking into account the expressions for Gij ,the bounds for |Rij | and (26), we have
‖u(t)‖∞ ≤ C(min{1, t− 1
4 }‖u0‖2 + min{1, t− 34 }‖v0‖2 + e−ct(‖u0‖∞ + ‖v0‖∞)
)+ C
∫ t
0
min{1, (t− s)−34 } (‖φ‖∞ + ‖∂xφ‖∞) (GK‖u‖2 +HK‖v‖2) ds
+ C
∫ t
0
e−c(t−s) (‖φ‖∞ + ‖∂xφ‖∞) (GK‖u‖∞ +HK‖v‖∞) ds .
By arguing as for the estimate of M14u , we obtain
N14u ≤ C(D′
00 + (D′01 + (1 +KFK)2M
14u )
(GK(M
14u +N
14u ) +HK(M
12v +N
12v )
),
(32)where D′
00 = ‖u0‖∞ + ‖v0‖∞ + ‖u0‖2 + ‖v0‖2 and D′01 = (1 + KFK)‖φ0‖2 +
‖∂xφ0‖∞+‖φ0‖∞ and Mu,Mv, Nu, Nv are calculated at time t. Similarly, we prove
that inequalities (31) and (32) hold also for M12v , N
12v .
Setting P := M14u +M
12v +N
14u +N
12v , it follows, for small initial data,
A∞P2(t)−Bd∞P (t) + Cd ≥ 0 , (33)
where A∞ is a positive constant depending on K, Bd∞ is a positive constantdepending on K and on the data and Cd is also a positive constant dependingon the data.
Formula (33), for suitably small data, implies that M14u (t), N
14u (t), M
12v (t), N
12v (t)
remain bounded as far as ‖u, v, φ, ∂xφ‖∞ ≤ K. On the other hand, when t > 1, thisimplies that ‖u(t)‖∞, ‖v(t)‖∞ do not increase with t. Thanks to Proposition 1, thesame holds for ‖φ(t)‖∞, ‖∂xφ(t)‖∞, then the claim follows from the continuationprinciple. In particular, it is easy to verify that a global estimate for ‖φ‖1,∞ impliesglobal estimates for ‖u‖1 and ‖v‖1.
Remark 6. The technique used in the above proof of stability for the zero constantstate fails when one attempts to prove the stability of non-zero constant stationarystates, even if small: in those cases, in the estimates of M
14u (t), M
12v (t), N
14u (t),
N12v (t) we have to consider also the linear term U∂xφ, which does not present enough
polynomial decay. This is not surprising, since our argument is based on a preciserepresentation of the solution to the linear system without the term U∂xφ. Thelinear stability analysis of the full operator, including this term, is absolutely nottrivial in the Cauchy case and beyond the aims of the present paper. However, insection 4, this analysis will be done in the case of a bounded domain and Neumannboundary conditions.
In the last part of this section we compare the large time behavior of the solutionu to system (19) with the solution of the parabolic Keller-Segel modelβ∂tu = uxx − ∂x
(g(φ, ∂xφ)u
)∂tφ = D∂xxφ+ f(u, φ) ,
(34)
where the functions f, g satisfy the assumptions (Hf ), (Hg).

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 13
It is known that, for small initial data, the solutions to the above problem decayin time in L∞ and L2 norms in the same way as the solutions to problem (19), seefor instance [28] and references therein. We will show that, under the assumptionof small initial data, if
u0(x) = u0(x) , φ0(x) = φ0(x) , (35)
then ‖u(t)− u(t)‖2 and ‖φ(t)− φ(t)‖2, for large t, approach zero faster than ‖u(t)‖2,‖u(t)‖2, ‖φ(t)‖2 and ‖φ(t)‖2.
Theorem 3.4. Let (u, v, φ) and (u, φ) be the global solutions respectively to system(19) and to system (34), under the assumptions (Hf ), (Hg), (Hh) and (35). Then,there exist ε0, L > 0 such that, if
‖u0‖∞, ‖v0‖∞, ‖u0‖1, ‖v0‖1, ‖φ0‖1,∞, ‖φ0‖2 ≤ ε0 ,
then, for all t > 0,
sup(0,t)
{max{1, s 12 }‖u(s)− u(s)‖2} , sup
(0,t)
{max{1, s 12 }‖φ(s)− φ(s)‖2} ≤ L .
Proof. Let K > 0 such that ‖u, v, φ, ∂xφ, u, φ, ∂xφ‖L∞(R×(0,+∞)) ≤ K. Thedifference between u and u can be expressed as follows
|u(t)− u(t)| ≤|(G11(t)− Γ1β (t)) ∗ u0|+ |G12(t) ∗ v0|
+∣∣∣∣∫ t
0
{G12(t− s) ∗
(g(φ, ∂xφ)u− h(φ, ∂xφ)v
)− 1β∂xΓ
1β (t− s) ∗ g(φ, ∂xφ)u
}ds
∣∣∣∣ .(36)
It is easy to verify that, for suitable large c1, c2, for |x| > t and t > 1, we haveΓ
1β (x, t) = Kp11(x, t) ≤ c1(1 + t)−1 e−x
2/c2t in such a way that
G11(x, t) = Γ1β (x, t)χ{t ≥ 1}+Kh11(x, t) +R11(x, t) ,
where Kh11 and R11 verify the bound in (27) and (28).Also, it is easy to verify that, for suitable large c1, c2, for |x| > t and t > 1,
1β∂xΓ
1β (x, t) = Kp12(x, t) ≤ c1 (1 + t)−3/2 e−x
2/c2t so that
G12(x, t) =1β∂xΓ
1β (x, t)χ{t ≥ 1}+Kh12(x, t) +R12(x, t) ,
where Kh12 and R12 verify the bound in (27) and (29).Now, from (36), for t > 1, we have
|u(t)− u(t)| ≤|(Kh11(t) +R11(t)) ∗ u0|+ |G12(t) ∗ v0|
+∣∣∣∣∫ t−1
0
1β∂xΓ
1β (t− s) ∗ (g(φ, ∂xφ)u− g(φ, ∂xφ)u) ds
∣∣∣∣+
∣∣∣∣∫ t
0
(Kh12(t− s) +R12(t− s)) ∗ g(φ, ∂xφ)u ds∣∣∣∣
+∣∣∣∣∫ t
t−1
1β∂xΓ
1β (t− s) ∗ g(φ, ∂xφ)u ds
∣∣∣∣+
∣∣∣∣∫ t
0
G12(t− s) ∗ h(φ, ∂xφ)v ds∣∣∣∣ .

14 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Proceeding as in the proof of Theorem 3.3, we are able to estimate ‖u − u‖2 forlarge t:
‖u(t)− u(t)‖2 ≤C(e−ct (‖u0‖2 + ‖v0‖2) + min{1, t− 3
4 } (‖u0‖1 + ‖v0‖1))
+ CGK
∫ t
0
min{1, (t− s)−34 } (‖∂xφ‖2 + ‖φ‖2) ‖u− u‖2 ds
+ CGK
∫ t
0
min{1, (t− s)−34 }‖u‖2
(‖φ− φ‖2 + ‖∂xφ− ∂xφ‖2
)ds
+ CGK
∫ t
0
min{1, (t− s)−54 }‖u‖2 (‖∂xφ‖2 + ‖φ‖2) ds
+ CHK
∫ t
0
min{1, (t− s)−34 }‖v‖2 (‖∂xφ‖2 + ‖φ‖2) ds
+ CGK
∫ t
t−1
(t− s)−34
(‖∂xφ‖2 + ‖φ‖2
)‖u‖2ds
+ C
∫ t
0
e−c(t−s) (‖φ‖∞ + ‖∂xφ‖∞) (GK‖u‖2 +HK‖v‖2) ds.
Arguing as in Proposition 1 it is easy to show that
M12
φ−φ(t) , M12
∂xφ−∂xφ(t) ≤ CKM
12u−u(t)
where CK is a constant depending on K; then, by using the known decays of theL2 and L∞ norms of u, u, φ, φ, ∂xφ, ∂xφ, we obtain
M12u−u ≤C(‖u0‖2 + ‖v0‖2 + ‖u0‖1 + ‖v0‖1) + C1K
(M
14φ +M
14∂xφ
+M14u
)M
12u−u
+ C2K
(M
14φ +M
14∂xφ
+N14φ +N
14∂xφ
) (M
14u +M
14u +M
12v
),
where C1K and C2K are constants depending on K and functions M and N arecalculated at time t. Now, for small M
14φ , M
14∂xφ
and M14u or K, i.e. for small initial
data, we have a global bound for M12u−u.
4. The Neumann problem: Stability of constant states. In this Section,we consider the problem of asymptotic stability of constant states (U, 0,Φ), withf(U,Φ) = 0 under suitable smallness condition on U , as analyzed in the Section 2,in bounded intervals. If f ∈ C1 and b := −fφ(U,Φ) > 0, by the Implicit FunctionTheorem, we deduce that there exists a branch of constant solutions Φ = Φ(U) forU close to U . Precisely, given L > 0, we turn to consider system
∂tu+ ∂xv = 0,
∂tv + γ2 ∂xu = g(φ, ∂xφ)u− h(φ, ∂xφ) v,
∂tφ−D∂xxφ = f(u, φ),x ∈ (0, L), t > 0 (37)
with Neumann boundary conditions for u and φ, i.e.
∂xu(0, t) = ∂xu(L, t) = ∂xφ(0, t) = ∂xφ(L, t) = 0 t > 0.
Assuming the system to be satisfied until the boundary, the boundary valuesV0(t) := v(0, t) and VL(t) := v(L, t) satisfy ∂tVi = −h(φ(i, t), 0)Vi, i ∈ {0, L}.In particular, if Vi(0) = 0, then Vi(t) = 0 for any t > 0.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 15
Assume f, g ∈ C2, h ∈ C1. If (U + u, v,Φ + φ) denotes a perturbed solution, theperturbation (u, v, φ) satisfies
∂tu+ ∂xv = 0,
∂tv + γ2 ∂xu− χU ∂xφ+ β v
= F1(φ, ∂xφ) + F2(φ, ∂xφ)u+ F3(φ, ∂xφ) v,
∂tφ−D∂xxφ+ bφ− a u = F4(u, φ),
(38)
where
F1(φ, ψ) := U(g(Φ + φ, ψ)− χψ
)= O(|(φ, ψ)|2),
F2(φ, ψ) := g(Φ + φ, ψ) = O(|(φ, ψ)|),F3(φ, ψ) := β − h(Φ + φ, ψ) = O(|(φ, ψ)|),
|(φ, ψ)| → 0
and
F4(u, φ) := f(U + u,Φ + φ)− a u+ b φ = O(|(u, φ)|2) |(u, φ)| → 0
where χ, β, a, b have been previously introduced at equation (11). Here, the symbolF = O(|w|α) means that for any compact set K there exists C = C(K) such that|F | ≤ C|w|α for any w ∈ K. In what follows, we assume functions g and h togetherwith their derivatives to be globally Lipschitz with respect to ψ so that the constantC can be chosen depending only on the L∞ norm of u and φ.
System (38) is completed by initial and boundary conditions
(u, v, φ)∣∣∣t=0
= (u0, v0, φ0), (∂xu, ∂xφ)∣∣∣x∈{0,L}
= (0, 0). (39)
Since the mass of u is conserved, decay of the perturbation can be expected only if
L∫0
u0(x) dx = 0. (40)
IfL∫0
u0(x) dx is small, we can consider as unperturbed constant state U := U +
1L
L∫0
u0(x) dx, so that condition (40) can be assumed without loss of generality, as
soon as |u0|L1 is sufficiently small.Setting w = (u, v, φ), system (38) can be rewritten as
∂tw + Lw = F(w) (41)
where operators L and F are defined by
Lw :=
∂xvγ2 ∂xu− χU ∂xφ+ β v−D∂xxφ+ bφ− a u
, F(w) :=
0F1 + uF2 + v F3
F4
(42)
together with initial/boundary conditions given in (39).Under the stability condition formally introduced in Section 2, we can prove that
constant states are asymptotically stable solutions (with perturbations decayingexponentially fast) of the Neumann initial–boundary value problem.

16 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Theorem 4.1. Assume f, g ∈ C2, h ∈ C1 with g and h satisfying (9) and let(U, 0,Φ) be a constant steady state of (37) such that
χ := ∂ψg(Φ, 0) > 0, β := h(Φ, 0) > 0, ∂φf(U,Φ) =: −b < 0 < a := ∂uf(U,Φ).(43)
Assume the stability condition
U <γ2
χa
(b+
Dπ2
L2
). (44)
Let w0 = (u0, v0, φ0) ∈ H1 be such that (40) holds, and w the corresponding solutionto (41) with initial/boundary conditions given in (39). Then there exists ε0 > 0 suchthat, if |w0|H1 ≤ ε0, then
‖w‖H1(t) ≤ C ‖w0‖H1 e−θ t ∀ t > 0. (45)
for some C, θ > 0.
The proof of the Theorem is based on a detailed analysis of the Green distributionof the linearized problem (see Theorem 4.2) and on the use of the Duhamel formulato deal with the nonlinear problem.
In the case of functions f and g satisfying the symmetry assumption describedin Remark 2, we can relax, for symmetric perturbations of constant states, thestability condition (44) of Theorem 4.1 .
Corollary 1. Let f, g, h be such that (43) holds and assume, additionally, thatcondition (10) is satisfied. Let (U, 0,Φ) be a constant steady state such that
U <γ2
χa
(b+
4Dπ2
L2
). (46)
Then the conclusion of Theorem 4.1 holds for initial data w0 = (u0, v0, φ0) whichverify the assumptions of this theorem and such that
u0
(L2− x
)= u0
(L2
+ x), v0
(L2− x
)= −v0
(L2
+ x), φ0
(L2− x
)= φ0
(L2
+ x).
Proof of Corollary 1. The symmetry assumption on the initial datum w0 togetherwith (10) guarantee that the same symmetry with respect to the middle point
x = L/2 is preserved for any time t > 0. In particular, there holds ∂xu(L
2, t
)=
∂xφ(L
2, t
)= 0 ∀ t > 0. As a consequence w
∣∣(0,L/2)
and w∣∣(L/2,L)
are solutions to
the same Neumann initial–boundary value problem in the intervals (0, L/2) and(L/2, L), respectively. Since
0 =∫ L
0
u0(x) dx =∫ L/2
0
u0
(L2− x
)dx+
∫ L/2
0
u0
(L2
+ x)dx = 2
∫ L/2
0
u0(x) dx,
the solution w∣∣(0,L/2)
satisfies the assumptions of Theorem 4.1 with respect to theinterval (0, L/2). Hence the conclusion follows from (45) and from the symmetry ofthe solution.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 17
Study of the linearized problem. First of all, let us consider the linearizedproblem
∂tw + Lw = 0 (47)
with initial/boundary conditions given in (39). Following the analysis performedin Section 2, we assume the stability condition (44). We aim to study the Greendistribution of the problem, i.e. a distribution-valued map (x, t) 7→ G = G(x, ·; t)such that the solution of (47)–(39) is given by w(x, t) = 〈G(x, ·; t), w0〉.
Considering an even extension of u0, φ0 to (−L,L) and an odd extension of v0 to(−L,L) and then a 2L−periodic extension of the full initial condition w0, we canrestrict our investigation to the case of 2L−periodic data. So, we look for solutionsof the form w(x, t) = 〈Gper(x, ·; t), w0〉, where the Green distribution Gper(x, ·; t) hasto be determined. Now, we express the solution by means of Fourier series
w(x, t) =+∞∑
k=−∞
W k(t) eiKL x where KL :=π k
L,
which yields a system of ODEs for the coefficients W k = W k(t):
dW k
dt+ A(KL)W k = 0.
Here A(k) := A0 + iA1k −A2k2 and
A0 :=
0 0 00 β 0−a 0 b
, A1 :=
0 1 0γ2 0 −χU0 0 0
, A2 :=
0 0 00 0 00 0 −D
.
Thus, W k(t) = e−A(KL) tW k(0) and the solution is formally given by
w(x, t) =1
2L
+∞∑k=−∞
∫ L
−Le−A(KL) t+iKL (x−y) Iw0(y) dy.
If the convergence of the series is sufficiently strong to exchange the summation withthe integral, the final form for the Green functionGper for the periodic problem turnsto be
Gper(x, y; t) =1
2L
∞∑k=−∞
eiKL(x−y) I−A(KL) t, (48)
where the convergence of the series is intended in the distributional (boundedmeasure) sense, since in general we expect a singular part (Dirac mass) arisingfrom the hyperbolic part of the differential operator.
For simplicity, from now on, we denote KL with k. The stability condition (44)implies that all of the eigenvalues of A(k) have positive real part for k 6= 0. Asa consequence, the contribution of such terms in the series for the Green functiongiven by (48) is expected to be exponential decaying in time. Hence, it makes senseto decompose the Green function as
Gper(x, y; t) =1
2Le−A(0) t +
12L
( ∑0<|k|<M
ei k(x−y) I−A(k) t+∑|k|≥M
ei k(x−y) I−A(k) t),
(49)with M a (large) number to be fixed later.

18 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
The first term in (49) can be computed and decomposed for large time as
e−A(0) t = Π +O(e−θ t) where Π :=
1 0 00 0 0a/b 0 0
for some θ > 0.
The second term in (49) can be estimated by means of the stability analysisperformed in Section 2. Indeed, the stability condition (44) guarantees existence ofa positive constant θ > 0 such that all of the eigenvalues of A(k) have real part lessthan −θ. In particular, there holds
12L
∑0<|k|<M
ei k(x−y) I−A(k) t = O(e−θ t).
The final step consists in analyzing the behavior for k large. Let us determine theeigenvalues expansions as k →∞. Using expression (12) of p(λ, k) found in Section2, we look for eigenvalues expansion of the form
Λ(k) = Λ2 k2 + Λ1 k + Λ0 +
1k
Λ−1 +O(k−2)
where Λ(k) := diag(λ−(k), λ+(k), λD(k)). Inserting in (12), we find the coefficientsof the expansion
Λ2 := −D diag(0, 0, 1), Λ1 := iγ diag(−1, 1, 0),
Λ0 := −diag(β/2, β/2, b
), Λ−1 :=
i η
2γdiag(1,−1, 0)
where η := 1D aχU+ 1
2 β2. Since γ 6= 0, for large k the matrix A(k) is diagonalizable
with diagonalizing matrix C = C(k). Hence, for large k,
e−A(k) t = C(k) eΛ(k) t C(k)−1.
Next, let us look for the expansion of the matrix C = C(k). First we expand theright eigenvalues of the matrix −A: r(k) = r0 + k−1 r−1 +O(k−2). Plugging in therelation (A(k) + λ(k))r(k) = 0 with λ(k) = c2 k
2 + c1 k + c0 +O(k−1), equating tozero the coefficient of powers of k, and using the explicit expressions for A0, A1, A2,we deduce that
r±0 = (1,±γ, 0), r±−1 = − i β2
(0, 1, 0) + θ r±0 θ ∈ R.
Similarly, for the branch λD(k), we have
rD0 = (1, 0, 0), rD−1 = (0,−χUD, 0) + θ rD0 θ ∈ R.
Thus, for k → ±∞, we can choose eigenvectors such that
C(k) = C0 +1kC−1 +O(k−2)
where
C0 :=
1 1 0−γ γ 00 0 1
, C−1 := −
0 0 0iβ/2 iβ/2 χU/D
0 0 0
.
Correspondingly, the expansion for C(k)−1 is
C(k)−1 = C−10 − 1
kC−1
0 C−1C−10 +O(k−2).

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 19
Thus we recover the expansion for the matrix e−A(k) t
e−A(k) t = C0 eΛ(k) t C−1
0 +1kC0
[C−1
0 C−1, eΛ(k) t
]C−1
0 +O(k−2),
where we used the notation[A,B
]= AB − BA. Moreover, setting Λ∞(k) :=
Λ2 k2 + Λ1 k + Λ0, we have
eΛ(k) t = eΛ∞(k)t(I + Λ−1 k
−1 +O(k−2)).
Hence, we deduce the following asymptotic expansion as k → +∞
e−A(k) t = C0 eΛ∞(k) t C−1
0
+ 1k C0
{eΛ∞(k) tΛ−1 +
[C−1
0 C−1, eΛ∞(k) t
]}C−1
0 +O(k−2) eΛ∞(k)t.(50)
With all of these expansions, we can prove the following results. Note that, in orderto obtain estimate on Gper itself, only the expansion to order O(k−1) is needed; thedetailed form of the k−1 is needed to estimate the x−derivative of Gper .
Theorem 4.2. The Green distribution Gper of the linear problem (47) with periodicinitial data and its x−derivative ∂xGper
can be decomposed as
Gper(x, y; t) =1
2LΠ +Gsing(x, y; t) +R0(x, y; t) (51)
∂xGper(x, y; t) = ∂xGsing
(x, y; t) +Hsing
(x, y; t) +R1(x, y; t) (52)
where
Gsing(x, y; t) := C0 e− 1
2 β tdiag(δ(x− γt− y), δ(x+ γt− y), 0)C−10
Hsing
(x, y; t) := C0 e− 1
2 β t {M−δ(x− γt− y) +M+δ(x+ γt− y)}C−10
with the matrices M± defined by
M− :=12γ
η − 12β χU/D
− 12 β 0 00 0 0
, M+ :=12γ
0 12 β 0
12 β −η −χU/D0 0 0
.
where η := 1D aχU + 1
2 β2, and the functions Ri = Ri(x, y; t), i = 0, 1 satisfy
‖Ri(·, y; t)‖2 ≤ C e−θ t for t > 0 and some constants C, θ > 0.
Proof. Thanks to (50), the decomposition in formula (49) can be refined as follows:
Gper(x, y; t) =Π2L
+G1 +G2 +O(e−θ t) (53)
for some θ > 0, where
G1 :=1
2LC0
∑|k|≥M
eΛ∞(k) t+i k (x−y) I C−10 , G2 :=
∑|k|≥M
O(k−1) eΛ∞(k) t+i k (x−y) I .
Fixed t, the term G2 defines an L2 function of the difference x − y with Fouriercoefficients Gk2 with respect to the orthogonal basis {ei(x−y) k}
k∈Z given by G02 = 0
and Gk2 = O(k−1) eΛ∞(k) t for k 6= 0. Since Λ1 is purely imaginary and Λ2 is nonpositive, there hold |G0
2|2 = 0 and |Gk2 |2 = O(k−2) e−β t for k 6= 0. As a consequence,the term G2 can be absorbed in the term R0 of the statement.

20 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Finally, we analyze the term G1. First, to understand better the behavior of thisdistribution, we extend the sum over all values of k. There holds
12L
+∞∑k=−∞
eΛ∞(k) t+i k (x−y)I = eΛ0 tdiag(f−, f+, fD)
where the distributions f±(x − y; t) :=1
2L
+∞∑k=−∞
ei k(x∓γt−y) are the Green
functions of the transport operators ∂t ± γ∂x and the distribution fD(x − y; t) :=1
2L
+∞∑k=−∞
e−Dk2 t+ik(x−y) is the Green function of the heat flow ∂t − D∂xx, with
periodic boundary conditions. The series in the definitions of f± and fD areconvergent in a distributional sense.
The term fD is smooth for every t > 0, thanks to the presence of the fastdecaying term e−Dk2 t. Since we are interested in the values of k 6= 0, this term canbe absorbed in the term R0 given in (51).
Next, we prove (52). From (50), formula (48) can be written as:
Gper(x, y; t) =1
2L
∞∑k=−∞
eik(x−y) I−A(KL) t = G1 +G2 +G3, (54)
where
G1(x, y; t) :=C0
2L
∞∑k=−∞
eik(x−y)+Λ∞(k) t C−10 ,
G2(x, y; t) := C0
2L
∞∑k=−∞
1
k{eΛ∞(k) t+ik(x−y) IΛ−1 + [C−1
0 C−1, eΛ∞(k) t+ik(x−y) I ]}C−1
0 ,
G3(x, y; t) :=∞∑
k=−∞
O(k−2) eΛ∞(k)t+ik(x−y) I .
The term G1 has been discussed above. Differentiation with respect to x givesraise to the sum of a distributional derivative of the singular term Gsing and asmooth term whose L2 norm is exponentially decaying in time. The term G3
can be easily dealt with. Indeed, after differentiation with respect to x, we
get ∂xG3(x, y; t) =∞∑
k=−∞
O(k−1) eΛ∞(k)t+ik(x−y) I and the L2 norm of ∂xG3 is
exponentially decaying in time.Finally, let us consider the term G2. After differentiation with respect to x, we
get ∂xG2(x, y; t) = H1(x, y; t) +H2(x, y; t) where
H1(x, y; t) :=i C0
2L
∑k 6=0
eΛ∞(k) t+ik(x−y) IΛ−1 C−10 ,
H2(x, y; t) :=i C0
2L
∑k 6=0
[C−1
0 C−1, eΛ∞(k) t+ik(x−y) I]C−1
0 .

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 21
From definitions of Λ−1, Λ∞(k), we get
12L
∑k 6=0
eΛ∞(k) t+ik(x−y) IΛ−1 :=η
4γ Le−
12 β t
∑k 6=0
diag(ei(x−y−γt)k,−ei(x−y+γt)k, 0)
=η
2γe−
12 β tdiag(δ(x− γt− y),−δ(x+ γt− y), 0),
completing the analysis of the term H1. Concerning H2, there holds
[C−1
0 C−1, eΛ∞(k) t
]=
12γ
0 β e−12 β t sin(γkt) κ−
β e−12 β t sin(γkt) 0 −κ+
0 0 0
where κ± :=
χU
D
(e−Dk2t−bt − e±iγkt−
12βt
). Hence
1
2L
∑k 6=0
[C−10 C−1, e
Λ∞(k) t+ik(x−y) I ] =e
12 β t
2γ{
0 − 12
β χ U/D− 1
2β 0 0
0 0 0
δ(x − γt − y)
+
0 12
β 012
β 0 −χ U/D0 0 0
δ(x + γt − y)} + O(e−θ t).
Collecting the terms, we obtain (52).
The projection term Π/2L operates as follows
12L
Πw =1
2L
∫ L
−L
1 0 00 0 0a/b 0 0
uvφ
(x) dx =
10a/b
u
where u :=1
2L
∫ L
−Lu(x) dx. In particular, Πw0 = 0 whenever (40) is satisfied.
Let us denote by Gsing = Gsing(x, t), Hsing = Hsing(x, t) and Ri = Ri(x, t), i = 0, 1,the operators with kernels Gsing ,Hsing , Ri in the decomposition given by Theorem4.2. We have the following decay results.
Corollary 2. Under the assumptions of Theorem 4.2, we have for some C, θ > 0,
‖Gsing(·, t)w‖2, ‖∂xHsing(·, t)w‖2, ‖Ri(·, t)w‖2 ≤ C e−θ t ‖w‖2, i = 1, 2,
‖∂xGsing(·, t)w‖2 ≤ C e−θ t ‖∂xw‖2.
(55)
Nonlinear stability. In order to prove nonlinear stability using the linear analysisjust performed, we need some basic energy estimates.
Lemma 4.3. Let D, b > 0. Given T > 0 and u ∈ C0([0, T ];H1), let φ ∈C([0, T ];H2) be solution of{
∂tφ−D∂xxφ+ b φ = a u+ F4(u, φ)
∂xφ(0, t) = ∂xφ(L, t) = 0,

22 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
where F4(u, φ) = O(|(u, φ)|2) as (u, φ) → (0, 0). Then there exists C, θ > 0 suchthat
eθ t‖∂xφ‖22 +
∫ t
0
eθ s(D‖∂xxφ‖2
2 + ‖∂xφ‖22
)ds ≤ C‖∂xφ0‖2
2
+ C
∫ t
0
eθ s‖∂xu‖22 ds+ C sup
t∈[0,T ]
‖(u, φ)‖∞∫ t
0
eθ s(‖(u, φ)‖2
2 + ‖∂xxφ‖22
)ds,
(56)for any t ∈ [0, T ].
Proof of Lemma 4.3. Multiplying the equation for φ by eθ t∂xxφ and rearranging,we get
12∂t(eθ t(∂xφ)2) + ∂xJ + eθ t
{(b− 1
2θ
)(∂xφ)2 +D(∂xxφ)2
}=eθ t(a∂xu∂xφ− F4∂xxφ)
where J := eθ t∂xφ(au − ∂tφ − bφ). Hence, integrating with respect to (x, t) inI × [0, t], we get, for θ sufficiently small,
eθ t‖∂xφ‖22 +
∫ t
0
eθ s(D‖∂xxφ‖2
2 + b ‖∂xφ‖22
)ds ≤ C‖∂xφ0‖2
2
+ C
∫ t
0
eθ s∫ L
0
(|∂xu| |∂xφ|+ |u|2 |∂xxφ|+ |φ|2 |∂xxφ|
)dx ds.
Applying Young inequality, we get (56).
Next we consider the nonlinear stability problem.
Proof of Theorem 4.1. Let w = (u, v, φ) be the solution of
∂tw = Lw + F(w), w∣∣t=0
= w0, (57)
with L and F defined in (42). Let T (t)w0 be the solution to the linear problem∂tw = Lw with initial datum w0. The operator-valued function t 7→ T (t) can berepresented by means of the Green distribution G, decomposed in Theorem 4.2, asthe sum of a projection term Π/2L, a singular part (composed by exponentiallydecaying Dirac’s delta functions) and an exponentially decaying smooth part.
The solution to (57) is implicitly given by the Duhamel formula.
w(t) = T (t)w0 +∫ t
0
T (t− s)F(w)(s) ds. (58)
By means of decomposition (51), the solution w satisfies
w(t) =(Gsing +R0
)(x, t)w0 +
∫ t
0
(Gsing +R0
)(x, t− s)F(w)(s) ds (59)
since ΠF = 0 and (40) holds. Secondly, we have
Gsing(x, y; t)F(w) =12γ
e−β t2
(F+ − F−, γF+ + γF−, 0
)twhere F := F1 + uF2 + v F3 and F± := F (x± γt, t).
Taking the L2−norm on both sides and applying (55), we obtain
eθ t‖w‖2(t) ≤ C ‖w0‖2 + C
∫ t
0
eθ s‖F(w)(s)‖2 ds.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 23
Differentiating (58) with respect to x, and taking the L2 norms, we get
eθ t|∂xw|2(t) ≤ C ‖w0‖H1 + C
∫ t
0
eθ s‖F(w)(s)‖H1 ds.
Summing up, we deduce
eθ t‖w‖H1(t) ≤ C ‖w0‖H1 + C
∫ t
0
eθ s‖F(w)(s)‖H1 ds.
By the structure of F , it follows ‖F(w)‖H1 ≤ C(‖w‖2
H1 +‖∂xxφ‖22
)for some C > 0,
depending on L∞−norm of u, φ, ∂xφ. Hence
eθ t‖w‖H1(t) ≤ C ‖w0‖H1 + C
∫ t
0
eθ s(‖w‖2
H1 + ‖∂xxφ‖22
)ds. (60)
To get rid of the term ∂xxφ we use (56). For |(u, φ)|∞ sufficiently small the termcontaining |∂xxφ|22 in the right-hand side of (56) can be absorbed in the left-handside. Hence, the following holds∫ t
0
eθ s‖∂xxφ‖22 ds ≤C‖∂xφ0‖2
2 + C
∫ t
0
eθ s‖∂xu‖22 ds
+ C supt∈[0,T ]
‖(u, φ)‖H1
∫ t
0
eθ s‖(u, φ)‖22 ds.
Using the above relation, from (60), we deduce
eθ t‖w‖H1(t) ≤ C ‖w0‖H1 + C(1 + supt∈[0,T ]
‖w‖H1)∫ t
0
eθ s‖w‖2H1 ds. (61)
Let η(t) := sups∈[0,t]
eθ s‖w‖H1(s). Then from (61) it follows
η(t) ≤ C ‖w0‖H1 + Cη(t)2∫ t
0
e−θ s ds ≤ C ‖w0‖H1 + Cη(t)2. (62)
The estimate (62) implies that there exists some ε0 > 0 such that, if η(0) ≤ ε0,then η(t) ≤ C η(0) for some C > 0 and for any t > 0.
5. Stationary solutions and bifurcation diagram. The aim of this sectionis to describe the whole set of stationary solutions for system (4) considered onthe interval [0, L] with no-flux boundary conditions v(0, ·) = v(L, ·) = 0 and∂xφ(0, ·) = ∂xφ(L, ·) = 0 and with the special choice
g(φ, ψ) = ψ, h(φ, ψ) = 1, f(u, φ) = au− bφ.
The first equation in (4) implies v to be constant. Assuming no-flux boundaryconditions, it leads to v = 0 and the system satisfied by the steady states reducesto {
γ2 ∂xu = ∂xφu,
−D∂xxφ = au− bφ.(63)
Such system is the same of the one satisfied by steady solutions of the Keller–Segel system (5) with Neumann boundary conditions ∂xu(0, ·) = ∂xu(L, ·) = 0 and∂xφ(0, ·) = ∂xφ(L, ·) = 0. A precise description of bifurcation patterns for such

24 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
solutions has been considered in [35]. From the first equation in (63), we deduceu = C exp
(γ−2 φ
), C ∈ R, so that the component φ satisfies{D∂xxφ+ aC exp
(γ−2 φ
)− bφ = 0, C ∈ R,
∂xφ(0, .) = ∂xφ(L, .) = 0.(64)
The function φ satisfies therefore the equation
H(φ, ∂xφ) = D (∂xφ)2 + 2aCγ2 exp(γ−2 φ
)− bφ2 = const. ,
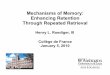
which enables us to draw the phase diagram (see Figure 1). It shows that accordingto the length of the curve, non constant steady states could exist. In fact, system
Figure 1. Phase diagram (φ, ∂xφ) of system (64)
(4) supports also non-homogeneous stationary solutions. In the following, all thesestationary solutions (u, φ) would be displayed as points of a same graph withcoordinates (
∫ L0u(x) dx, φ(0)). On this graph, the constant stationary solutions
would form the line ax− by = 0 (see figure 2).More precisely, according to [35], for all k ∈ N∗, there exists a bifurcation branch
Bk of non constant stationary solutions starting, in our case, at constant steady
state Φk =γ2
a
(Dk2π2
L2+ b
). The derivatives of both solutions u and φ of branch
Bk get null at exactly k+1 points of [0, L]. In [35], more precise results on the formof branches are also given; for example, two different branches do not cross.
Numerically, we obtain the following bifurcation diagrams by a shooting method:starting in the neighborhood of point (Ck = Uk exp
(γ−2 Φk
),Φk) of the constant
stationary solutions line, we solve the problem (64) for all suitable C. We changethe values φ0 until obtaining a solution φ such that ∂xφ(L, ·) = 0. Once the solutionφ is found, we compute the corresponding function u = C exp
(γ−2 φ
)and its mass∫ L
0u(x)dx. We can therefore put the corresponding point on the diagram, as can
be seen on figure 2, where we exhibit the two first branches B1 and B2 .

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 25
Figure 2. Bifurcation diagram in the case a = b = D = 1 and on thedomain [0, 1]. The first bifurcation branch is stable and the second oneis unstable, except if the initial data are symmetric.
Let us now discuss the stability of all these stationary solutions. Since thequantity
∫ L0u(x, t)dx is preserved in time, stability has to be intended as orbital
stability, that is to say with perturbations u of function u such that∫ L0u(x)dx = 0.
In [35], it is proved that, for the Keller-Segel equation (5), constant steady statesare stable under the first bifurcation point, that is to say under condition (44).In the previous section, we have shown that the same result holds true for thehyperbolic system (4).
In [35], a first result on stability for non-constant stationary solutions is alsogiven, that is to say that the first bifurcation branch B1 is stable if and only ifb < 2π2/L2. We were unable to give here an analytic proof of the analogous resultfor hyperbolic system (4).
However, we observe numerically that in the case where b ≥ 2π2/L2, the formof bifurcation diagram around the first bifurcation point changes as seen in figure3. As explained in more details in section 7, the same stability holds for bothparabolic and hyperbolic models; indeed, in the case b < 2π2/L2, B1 is stable andthe other branches are unstable as shown in figure 2. In the case b ≥ 2π2/L2, B1 isunstable around the first bifurcation point and then stable and the other branchesare unstable, as shown in figure 3.
Moreover, according to Remark 2, special attention has to be drawn on symmetricinitial data. For example, in the case b < 2π2/L2, that is to say, the case offigure 2, if we begin with a symmetric initial datum u which mass is such that
U1 <
∫ L
0
u(x)dx < U2, the solution will tend to constant steady state for long
time, although the constant steady state is unstable. This is in full agreementwith the conclusions of Corollary 1. Also, it should be noticed that this is not incontradiction with the stability of the non-constant steady state, since none of the

26 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Figure 3. Bifurcation diagram in the case a = b = 50 and D = 1 andon the domain [0, 1]. The second graph is an enlargement of the firstgraph around the first bifurcation point. The first bifurcation branchis unstable around the bifurcation point and then becomes stable. Thesecond one, like in the case of figure 2, is unstable except if the initialdata are symmetric.
admissible perturbations (i.e. small enough) added with the non-constant steadystate would give a symmetric function. We can also understand this result in thisway: since the symmetry is preserved with time and the stable stationary solutionof first branch B1 is not symmetric, the solution can not tend towards the stablesteady state.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 27
6. Numerical methods. The aim of these last sections is to give numericalevidences of results of Section 4, but also to explore numerically the behaviors ofsolutions in other cases where the asymptotic behavior has not yet been establishedby analytical tools. That is to say, we will confirm the stability of constantstationary solutions before the first bifurcation point and the instability after it. Wealso aim at finding the stability for the hyperbolic model of non constant stationarysolutions mentioned in Section 5. For that purpose, let us introduce an appropriatehyperbolic numerical scheme.
We consider the system (4) on the interval [0, L] with
g(φ, ψ) = ψ, h(φ, ψ) = 1, f(u, φ) = au− bφ
and with homogeneous Neumann boundary conditions for φ and homogeneousDirichlet boundary conditions for v. These two conditions and the second equationof (4) lead to homogeneous Neumann conditions for u on the boundaries.
In order to discretize it, we write it in more convenient form with diagonal
variables w =12(u − v/γ) and z =
12(u + v/γ), which correspond respectively
to the functions u− and u+ of Section 2. The system becomes∂tw − γ ∂xw = −1
2
(1 +
1γ∂xφ
)w +
12
(1− 1
γ∂xφ
)z
∂tz + γ ∂xz =12
(1 +
1γ∂xφ
)w − 1
2
(1− 1
γ∂xφ
)z
∂tφ−D∂xxφ = a(w + z)− bφ.
(65)
Let us denote by δx the space step and by δt the time step. We consider thediscretization points xj = j δx, 0 ≤ j ≤ N + 1, with x0 = 0 and xN+1 = L.The discretization times will be given by tn = n δt, n ∈ N. Let us denote by wnj(resp. znj and φnj ) the approximation of w(xj , tn) (resp. z(xj , tn) and φ(xj , tn)).The discretization vectors at time tn will therefore be Wn = (wn1 , . . . , w
nN )t,
Zn = (zn1 , . . . , znN )t and Φn = (φn1 , . . . , φ
nN )t.
We first discretize the two first equations of system (65) by using upwindexplicit methods and the third one using Crank-Nicolson scheme in time and finitedifferences method of order two in space. The boundary conditions are treated asfollows: v(0, t) = v(L, t) = 0 lead to zn0 = wn0 and wnN+1 = znN+1 in discrete (w, z)variables. Since wn+1
0 and zn+1N+1 are computed thanks to the upwind method, we
simply compute w and z on boundaries aszn+10 = wn+1
0 =(
1− γδt
δx
)wn0 + γ
δt
δxwn1 ,
wn+1N+1 = zn+1
N+1 =(
1− γδt
δx
)znN+1 + γ
δt
δxznN .
The function φ satisfies homogeneous Neumann boundary conditions and we use afinite difference discretization of order two of its derivative, which gives:
φn0 =4φn1 − φn2
3, φnN+1 =
4φnN − φnN−1
3. (66)
This enables us to compute ∂xΦn whose j-th component is the centeredapproximation of order two of ∂xφ(xj , tn). This vector is needed for thediscretization of the two first equations of system (65).

28 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Consequently, let M be the classical finite differences N × N matrix, usingdiscretizations (66) for the computation of the first and the last raws. We considerthe following scheme
wn+1j = wnj + γ
δt
δx(wnj+1 − wnj )− δt
2γ∂xΦnj (w
nj + znj )− δt
2(wnj − znj ), 1 ≤ j ≤ N,
zn+1j = znj − γ
δt
δx(znj − znj−1) +
δt
2γ∂xΦnj (w
nj + znj ) +
δt
2(wnj − znj ), 1 ≤ j ≤ N,
Φn+1 =((
1 + bδt
2
)I +
δt
2δx2DM
)−1
×((1− b
δt
2)Φn − δt
2δx2DMΦn + a
δt
2(Wn +Wn+1 + Zn + Zn+1)
).
(67)Since the spectrum of M is contained in the disk D(2, 2) = {λ ∈ C : |λ− 2| ≤ 2},
the matrix(
1 + bδt
2
)I +
δt
2δx2DM is invertible without any condition on δt and
δx.Such scheme preserves some properties of the original system: constant stationary
solutions, conservation of mass, symmetry with respect to the transformation(x, t, u, v, φ) 7→ (L−x, t, u,−v, φ). It also gives some results for the functions u andφ, which are in good adequacy with the values obtained on bifurcation diagrams atSection 5.
However, the function v is not null at equilibrium as predicted by the continuousanalysis. Indeed, rewriting scheme (67) in the initial variables u and v, we find thefollowing equation for un:
un+1j = unj −
δt
2δx(vnj+1 − vnj−1) +
γ
2δt
δx(unj+1 − 2unj + unj−1).
We therefore see that when u reaches its equilibrium and when the gradient of u islarge (which happens frequently for non constant steady state solutions), the spacestep δx needs to be very small in order to cancel function v.
Such kind of problems are not surprising when dealing with the numericalapproximation of stationary solutions. Even in the context of hyperbolicchemotaxis, some attempts were made to give an exact resolution of steady states,see [10] and references therein. However, those papers were more devoted to thestudy of the Cauchy problem and the ideas they proposed do not seem relevantto the present framework, where the treatment of the boundary conditions is morecrucial. Here, we follow the ideas of [2] and we present a scheme which is moreaccurate for stationary solutions. In a following work [30], we will give more detailson the numerical problems related to the simulation of this system.
Now, let us denote by f the right hand side φx u and in the following we shallomit the parabolic equation for φ which will be treated as before. We thereforeconsider the following system for x ∈ [0, L]{
∂tu+ ∂xv = 0,
∂tv + γ2 ∂xu = f − v
with the boundary conditions v(0, ·) = v(L, ·) = f(0, ·) = f(L, ·) = 0.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 29
We reconsider the system in diagonalizing variables, that is to say∂tw − γ∂xw =
12(z − w)− 1
2γf
∂tz + γ∂xz =12(w − z) +
12γf.
Let us denote by ω =(wz
)and we rewrite the system in the following form, see
[2, 30]:∂tω + Γ ∂xω = Bω + F,
with
Γ =(−γ 00 γ
), B =
12
(−1 11 −1
)and F =
12γ
(−ff
).
We denote by ωni an approximation of ω(xi, tn) and we consider schemes of thefollowing form:
ωn+1i − ωniδt
+Γ2h
(ωni+1 − ωni−1
)− q
2h(ωni+1 − 2ωni + ωni−1)
=∑
`=−1,0,1
B` ωni+` +∑
`=−1,0,1
D` Fni+`.(68)
In [30], we shall give conditions to ensure monotonicity, consistency of this scheme,third-order accuracy of the truncation error when restricted to stationary solutions.We also compute the matrices B` and D` in order to preserve mass, symmetry andconstant stationary solutions. Here we just present the final scheme, which is givenby q = γ and
B0 =23B +
h
4γ
(1 −1−1 1
), B1 =
112
(−8 55 −2
)+
q
4γ
(1 −11 −1
),
B−1 =112
(4 −1−1 −2
)− q
4γ
(1 −11 −1
),
D0 =23I2,2 +
h
4γ
(−2 −11 0
), D±1 =
12
(I2,23
± q
2γ
(1 00 −1
)).
(69)
We also have the following restrictions on the time and space steps, which
guarantee the monotonicity of the scheme [30]: h ≤ 24γ11
, δt ≤ 1γ/h+ 1/3− h/8γ
.
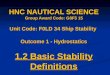
In Figure 4, we can compare the computations for functions u and v at final time(i.e. when u has reached its equilibrium) with the two schemes (67) and (68)-(69) forthe same parameters and the same initial data. On the left, the computed functionsu are almost the same and in sharp agreement with the expected result; however,we can see on the right the difference between the computations of function v, whichis expected to be equal to zero. While the error for the first scheme is quite large,it almost vanishes for the second scheme.

30 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
Function u
x0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
!200
!150
!100
!50
0
50
Function v
x
scheme 1scheme 2
scheme 1scheme 2
Figure 4. Comparison of the functions u and v computedrespectively with the scheme (67) and the scheme (68)-(69). Theparameters and initial data are those of Figure 6 (a).
7. Numerical results.
7.1. Asymptotic behavior of system (65). The first aim of this section is topresent some numerical simulations in agreement with the previous theoreticalresults and with the stability results announced in Section 5. In this first part,stability will always mean stability for the system (4). In reality, we think thatstability for system (4) and for system (5) are the same and we shall give a fewnumerical evidences of this fact in subsection 7.2. Let us begin with the analysisof the bifurcation diagram in Figure 2, which displays the line of constant steadystates and the two first bifurcation branches B1 and B2. As shown analyticallyin Section 4, the stationary solutions before the first bifurcation point are stable.Indeed, we check it on Figure 5 since any solution with a mass smaller than thefirst bifurcation point tends to the corresponding stable constant steady state.
Now, let us see what happens for solutions with a mass between the first and thesecond bifurcation point. Analytically we only know that the constant stationarysolution is unstable, but not for symmetric perturbations of a constant state, asstated by Corollary 1. The behaviors are shown in Figure 6: in both cases, themass of the initial datum
∫ L0u0(x)dx = 1135 is between the values of the two
first bifurcation points. The stable steady state is displayed as asymptotic profilein Figure 6(a); we notice that the boundary values obtained for φ, i.e. φ(0) andφ(L) are in good agreement with the values displayed on the bifurcation diagramof Figure 2.
Finally, for solutions with a mass after the second bifurcation point, the unstableconstant stationary solution will never be reached asymptotically. In fact, numericalstudies displayed in Figure 7 show that, generally speaking, the asymptotic solutionwill be the profile of branch B1, as in Figure 7(a). However, for symmetric

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 31
Figure 5. Evolution of solutions u and φ with time on the interval[0, 1]. Case a = b = D = 1 and γ = 10. The mass of the initial datum∫ L
0u0(x)dx = 10 is less than the value of the first bifurcation point and
therefore the only stable stationary solution is the constant steady state.
(a) General case (b) Case of symmetric initial data
Figure 6. Evolution of solutions u and φ with time on the interval[0, 1]. Case a = b = D = 1 and γ = 10. In both cases, the mass ofthe initial datum
∫ L0u0(x)dx = 1135 is between the values of the
two first bifurcation points. The only stable stationary solution,which is the one of the first bifurcation branch, is the asymptoticprofile obtained in figure (a). However, if the initial data aresymmetric as in figure (b), the solution tends to the constant steadystate.

32 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
(a) General case (b) Case of symmetric initial data
Figure 7. Evolution of solutions u and φ with time on the interval[0, 1]. Case a = b = D = 1 and γ = 10. In both cases, the mass ofthe initial datum
∫ L0u0(x)dx = 4100 is greater than the value of
the second bifurcation point. The only stable stationary solution,which is the one of the first bifurcation branch, is the asymptoticprofile obtained in figure (a). However, if the initial data aresymmetric as in figure (b), the solution tends to the stationarysolution of the second branch.
perturbations, the final profile will be the symmetric stationary solution of branchB2, see Figure 7(b).
Now, let us see some numerical results in the case b ≥ 2π2/L2, correspondingto the second bifurcation diagram in Figure 3. Apart from the neighborhoodof the first bifurcation point, the stability results are the same as in the caseb < 2π2/L2. However, around this point, we can see on the enlargement thatthree stable solutions coexist for a same mass. This is displayed in Figure 8: in (a),the asymptotic profile is the constant stable steady state and in (b), the asymptoticprofile is the non constant stable steady state of branch B1.
However, Figure 9 shows that the two remaining stationary state are unstable,as predicted by [35] (it is the initial data of the evolution displayed in subfigure(a)). In that case, the solution tends asymptotically to the constant steady state.Moreover, a small perturbation of the same unstable stationary solution leads tothe other non constant stable steady state. We conclude from these two numericalexperiments that the basins of attraction of the two stable stationary solution aredifficult to characterize.
7.2. Comparison between hyperbolic and parabolic models. Let us justbriefly compare the difference of behaviors between solutions for the hyperbolicmodel (4) and the parabolic system (5). As displayed in Figures 10 and 11, theasymptotic behaviors of the systems seem to be exactly the same. However, aswe can notice in Figure 11, the function u oscillates much more for the hyperbolicequation than for the parabolic equation. Therefore, the function u solution of thehyperbolic equation converges more slowly to the asymptotic state that the functionu solution of the parabolic equation.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 33
(a) Convergence to constant steady state (b) Convergence to the stationary solution
of first branch
Figure 8. Evolution of solutions u and φ with time on the interval[0, 1]. Case a = b = 50, D = 1 and γ = 10. In both cases, the massof the initial datum
∫ L0u0(x)dx = 110 is less than the value of the
first bifurcation point and more than the critical point. There aretwo stable stationary solutions: the constant steady state obtainedasymptotically in figure (a) and the stationary solution of the firstbifurcation branch obtained in figure (b).
(a) Convergence to constant steady state (b) Convergence to the stationary solution
of first branch
Figure 9. Evolution of solutions u and φ with time on the interval[0, 1]. Case a = b = 50, D = 1 and γ = 10. In both cases, themass of the initial datum is
∫ L0u0(x)dx = 110 and the initial data
are a perturbation of the unstable stationary solution of the firstbifurcation norm. Therefore, the basins of attraction of both stablestationary solutions displayed in Figure 8 are difficult tocharacterize.

34 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
(a) Hyperbolic equation (b) Parabolic equation
Figure 10. Evolution of solutions u and φ with time on theinterval [0, 1]. Case a = b = D = 1 and γ = 10. The mass ofthe initial datum is
∫ L0u0(x)dx = 1135. The solution tends to the
stationary solution of the first bifurcation branch.
(a) Hyperbolic case (b) Parabolic case
Figure 11. Evolution of solutions u and φ with time on theinterval [0, 1]. Case a = b = D = 1 and γ = 10. The mass ofthe initial datum is
∫ L0u0(x)dx = 1135. As the initial data are
symmetric, the solution tends to the constant steady state.
This is quantified at Figure 12. On this figure, we can see above the convergencespeed of function u towards its asymptotic state and below the convergence speedof function φ. More precisely on the subfigure above, we display the quantity
ln(||u− uas||∞||uas||∞
)with respect to time and on the subfigure below, the quantity
ln(||φ− φas||∞||φas||∞
)with respect to time. In red, it is displayed the convergence
speed obtained for equation (4) and in blue the one obtained for equation (5). Let

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 35
Figure 12. Evolution of the quantity ln
(||u − uas||∞||uas||∞
)(above) and
ln
(||φ − φas||∞||φas||∞
)(below) with time. Case a = b = D = 1, γ = 10 and∫ L
0u0(x)dx = 10. We display in red the convergence speed obtained for
equation (4) and in blue the one obtained for equation (5).
us remark that the speed of convergence of the hyperbolic model oscillates due to thecorresponding oscillations of the solutions. Since we are in the case a = b = D = 1,γ = 10 and
∫ L0u0(x)dx = 10, the asymptotic states for both u and φ are the
constant function equal to 10. We can remark clearly that the speed of convergenceto equilibrium in model (4) is slower both for u and φ than for model (5). We alsonotice that after a given time, a residual error remains which is due to the numericalapproximation and which therefore depends both on δt and δx. A linear regressionenables us to find the coefficients au,h, Cu,h, aφ,h, Cφ,h such that
||u− uas||∞||uas||∞
= Cu,h exp(−au,ht),||φ− φas||∞||φas||∞
= Cφ,h exp(−aφ,ht) (70)
for hyperbolic model (4) and the coefficients au,p, Cu,p, aφ,p, Cφ,p such that
||u− uas||∞||uas||∞
= Cu,p exp(−au,pt),||φ− φas||∞||φas||∞
= Cφ,p exp(−aφ,pt) (71)
for parabolic model (5). The values of the coefficients are given at Table 1. Forthe hyperbolic model, they have been computed using only the straight line ofupper values in red of Figure 12. However, we notice that for short times, theevolution of solution u for the hyperbolic model (4) is just a power law. In fact,for short times, the solution has not been yet influenced by the boundaries andtherefore, the convergence speed is the one of the Cauchy case, in agreement with

36 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
Table 1. Table of coefficients of equations (70) and (71)
Hyperbolic model (4) Parabolic model (5)Function u au,h = 0.7408576 au,p = 4.2311464
Cu,h = 0.0004380 Cu,p = 0.0052609Function φ aφ,h = 0.7123929 aφ,p = 10.650477
Cφ,h = 0.0000137 Cφ,p = 0.0005583
Theorem 3.3, and even better since a linear regression gives that, for short times,||u− uas||∞||uas||∞
= Cu,ht−au,h , with au,h = 0.4899891 and Cu,h = 0.0007756.
(a) Hyperbolic case (b) Parabolic case
Figure 13. Evolution of solutions u with time on the interval[0, 1]. Case a = b = D = 1 and γ = 10. The mass of the initialdatum is
∫ L0u0(x)dx = 10. We can see that for short times, the
evolution of the parabolic function u and of the hyperbolic functionu are clearly different.
Finally, Figure 13 shows us the difference of behaviors for solutions u for shorttimes: in case of the hyperbolic model (4), the solution oscillates a lot and thespurious bumps move until the boundaries. For parabolic model (5), the solutionalso oscillates, but the bumps remain localized in space and the solution dissipatesup to the asymptotic state.
Acknowledgments. This work has been partially supported by the project“Mathematical problems for the biological damage of monuments” in the CNR-CNRS 2008-2009 agreement, the INdAM-GNAMPA project 2007 “Nonlinearhyperbolic equations”, the INdAM-GNAMPA project 2008 “Hyperbolic models forchemotaxis”, and by a INdAM-GNAMPA grant for young visitors for the fourthauthor.
REFERENCES
[1] D. Ambrosi and L. Preziosi, On the closure of mass balance models for tumour growth, Math.
Models Methods Appl. Sci., 12 (2002), 737–754.

A ONE DIMENSIONAL HYPERBOLIC MODEL OF CHEMOTAXIS 37
[2] D. Aregba-Driollet, M. Briani and R. Natalini, Asymptotic high-order schemes for 2 × 2dissipative hyperbolic systems, SIAM J. Numer. Anal., 46 (2008), 869–894.
[3] S. Bianchini, B. Hanouzet and R. Natalini, Asymptotic behavior of smooth solutions for
partially Dissipative hyperbolic systems with a convex entropy, Communications Pure Appl.Math., 60 (2007), 1559–1622.
[4] A. Bressan, “Hyperbolic Systems of Conservation Laws. The One-Dimensional CauchyProblem,” Oxford Lecture Series in Mathematics and its Applications, 20. Oxford University
Press, Oxford, 2000.
[5] V. Calvez and L. Corrias, The parabolic-parabolic Keller-Segel model in R2, Commun. Math.Sci., 6 (2008), 417–447.
[6] F. A. C. C. Chalub, P. A. Markowich, B. Perthame and C. Schmeiser, Kinetic models for
chemotaxis and their drift-diffusion limits, Monatsh. Math., 142 (2004), 123–141.[7] S. Childress and J. K. Percus, Nonlinear aspects of chemotaxis, Math. Biosci., 56 (1981),
217–237.
[8] Y. Dolak and T. Hillen, Cattaneo models for chemosensitive movement. Numerical solutionand pattern formation, J. Math. Biol., 46 (2003), 153–170; corrected version after misprinted
p.160 in J. Math. Biol., 46 (2003), 461–478.[9] F. Filbet, Ph. Laurencot and B. Perthame, Derivation of hyperbolic models for chemosensitive
movement, J. Math. Biol., 50 (2005), 189–207.[10] F. Filbet and C.-W. Shu, Approximation of hyperbolic models for chemosensitive movement,
SIAM J. Sci. Comput., 27 (2005), 850–872.[11] A. Gamba, D. Ambrosi, A. Coniglio, A. de Candia, S. Di Talia, E. Giraudo, G. Serini, L.
Preziosi and F. Bussolino, Percolation, morphogenesis, and Burgers dynamics in blood vesselsformation, Phys. Rev. Letters, 90 (2003), 118101.1–118101.4.
[12] J. M. Greenberg and W. Alt, Stability results for a diffusion equation with functional drift
approximating a chemotaxis model, Trans. Amer. Math. Soc., 300 (1987), 235–258.[13] T. Hillen, Hyperbolic models for chemosensitive movement, Math. Models Methods Appl.
Sci., 12 (2002), 1007–1034.[14] T. Hillen, On the L2-moment closure of transport equations: The Cattaneo approximation,
Discr. Cont. Dyn. Systems, Series B, 4 (2004), 961–982.[15] T. Hillen and H. A. Levine, Blow-up and pattern formation in hyperbolic models for
chemotaxis in 1-D, Z. angew. Math. Phys., 54 (2003), 1–30.
[16] T. Hillen and H. G. Othmer, The diffusion limit of transport equations derived from velocity-
jump processes, SIAM J. Appl. Math., 61 (2000), 751–775.[17] T. Hillen and K. J. Painter, A user’s guide to PDE models for chemotaxis, J. Math. Biol.,
58 (2009), 183–217.[18] T. Hillen and K. Painter, Global existence for a parabolic chemotaxis model with prevention
of overcrowding, Adv. in Appl. Math., 26 (2001), 280–301.[19] T. Hillen and A. Potapov, The one-dimensional chemotaxis model: global existence and
asymptotic profile, Math. Meth. Appl. Sci., 27 (2004), 1783–1801.[20] T. Hillen, C. Rohde and F. Lutscher, Existence of weak solutions for a hyperbolic model of
chemosensitive movement, J. Math. Anal. Appl., 26 (2001), 173–199.[21] T. Hillen and A. Stevens, Hyperbolic models for chemotaxis in 1-D, Nonlinear Anal. Real
World Appl., 1 (2000), 409–433.
[22] D. Horstmann, From 1970 until present: The Keller–Segel model in chemotaxis and itsconsequences, (MR2013508) part I. Jahresber. Deutsch. Math.-Verein., 105 (2003), 103–165;
(MR2073515) part II. Jahresber. Deutsch. Math.-Verein., 106 (2004), 51–69.[23] H. J. Hwang, K. Kang and A. Stevens, Global existence of classical solutions for a hyperbolic
chemotaxis model and its parabolic limit, Indiana Univ. Math. J., 55 (2006), 289–316.[24] H. J. Hwang, K. Kang and A. Stevens, Global solutions of nonlinear transport equations for
chemosensitive movement, SIAM J. Math. Anal., 36 (2005), 1177–1199.[25] E. F. Keller and L. A. Segel, Initiation of slime mold aggregation viewed as an instability, J.
Theor. Biol., 26 (1970), 399–415.
[26] R. Kowalczyk, A. Gamba and L. Preziosi, On the stability of homogeneous solutions to someaggregation models, Discrete Cont. Dynamical Systems, Series B, 4 (2004), 203–220.
[27] J. D. Murray, (MR1908418) “Mathematical Biology. I. An Introduction,” Third edition.Interdisciplinary Applied Mathematics, 17. Springer-Verlag, New York, 2002; (MR1952568)
“Mathematical Biology. II. Spatial Models and Biomedical Applications,” Third edition.Interdisciplinary Applied Mathematics, 18. Springer-Verlag, New York, 2003.

38 F. R. GUARGUAGLINI, C. MASCIA, R. NATALINI AND M. RIBOT
[28] T. Nagai and T. Yamada, Large time behavior of bounded solutions to a parabolic system ofchemotaxis in the whole space, J. Math. Anal. Appl., 336 (2007), 704–726.
[29] K. Osaki and A. Yagi, Finite dimensional attractor for one-dimensional Keller-Segel
equations, Funkcial. Ekvac., 44 (2001), 441–469.[30] R. Natalini and M. Ribot, Mass preserving schemes for inhomogeneous systems of dissipative
hyperbolic equations, in preparation.[31] H. G. Othmer and T. Hillen, The diffusion limit of transport equations. II. Chemotaxis
equations, SIAM J. Appl. Math., 62 (2002), 1222–1250.
[32] K. J. Painter and T. Hillen Volume-filling and quorum-sensing in models for chemosensitivemovement, Can. Appl. Math. Q., 10 (2002), 501–543.
[33] C. S. Patlak, Random walk with persistence and external bias, Bull. Math. Biophys., 15
(1953), 311–338.[34] B. Perthame, “Transport Equations in Biology,” Frontiers in Mathematics, Birkhauser, 2007.
[35] R. Schaaf, Stationary solutions of chemotaxis systems, Trans. Amer. Math. Soc., 292 (1985),
531–556.[36] L. A. Segel, A theoretical study of receptor mechanisms in bacterial chemotaxis, SIAM J.
Appl. Math., 32 (1977), 653–665.[37] M. J. Tindall, S. L. Porter, P. K. Maini, G. Gaglia and J. P. Armitage, Overview of
mathematical approaches used to model bacterial chemotaxis. I. The single cell., Bull. Math.
Biol., 70 (2008), 1525–1569.[38] M. J. Tindall, S. L. Porter, P. K. Maini and J. P. Armitage, Overview of mathematical
approaches used to model bacterial chemotaxis. II. Bacterial populations, Bull.Math. Biol.,
70 (2008), 1570–1607.[39] A. Tosin, D. Ambrosi and L. Preziosi, Mechanics and chemotaxis in the morphogenesis of
vascular networks, Bull. Math. Biol., 68 (2006), 1819–1836.
Received September 2008; revised February 2009.E-mail address: [email protected]
E-mail address: [email protected]
E-mail address: [email protected]
E-mail address: [email protected]