Embed Size (px)
Citation preview
MA106-Linear AlgebraSpring 2011
Anant R. Shastri
Department of MathematicsIndian Institute of Technology, Bombay
January 19, 2011

ARS (IITB) MA106-Linear Algebra January 19, 2011 2 / 59

—————————
Linear Algebra MA106
Prescribed text books:
I 1. H. Anton, Elementary linear algebra with applications (8th Edition), JohnWiley (1995).
I 2. G. Strang, Linear algebra and its applications (4th Edition), Thom-son(2006).
I 3. S. Kumaresan, Linear algebra - A Geometric approach, Prentice Hall ofIndia (2000).
I 4. E. Kreyszig, Advanced engineering mathematics (8th Edition), John Wiley(1999).
ARS (IITB) MA106-Linear Algebra January 19, 2011 2 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,
I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,
I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59
Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussion
AS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Overview of the Course
I This is the second course in mathematics for you in IIT.
I In the first course itself you have studied some basic properties of functionssuch as:
I continuity,I differentiability,I and integration, etc.
I These were real valued functions of one or two real variables.
I In this course we shall get into the realm of unlimited number of variables.
I On the other hand, in the beginning, it is prudent to keep this discussionAS SIMPLE AS POSSIBLE.
I Simplest of functions which have sufficiently interesting properties (notconstants!) are linear functions. Therefore, we shall start our study with thatof Linear Algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 3 / 59

Introduction
To begin with Linear Algebra brings unified approach to certain topics which arefamiliar to you such as
I coordinate geometry
I vector algebra.
Apart from playing a very crucial role in the basic understanding of the calculus ofseveral variables, Linear Algebra has its own importance with applications inalmost all scientific studies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 4 / 59

Introduction
To begin with Linear Algebra brings unified approach to certain topics which arefamiliar to you such as
I coordinate geometry
I vector algebra.
Apart from playing a very crucial role in the basic understanding of the calculus ofseveral variables, Linear Algebra has its own importance with applications inalmost all scientific studies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 4 / 59

Introduction
To begin with Linear Algebra brings unified approach to certain topics which arefamiliar to you such as
I coordinate geometry
I vector algebra.
Apart from playing a very crucial role in the basic understanding of the calculus ofseveral variables, Linear Algebra has its own importance with applications inalmost all scientific studies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 4 / 59

Introduction
To begin with Linear Algebra brings unified approach to certain topics which arefamiliar to you such as
I coordinate geometry
I vector algebra.
Apart from playing a very crucial role in the basic understanding of the calculus ofseveral variables, Linear Algebra has its own importance with applications inalmost all scientific studies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 4 / 59

Introduction
To begin with Linear Algebra brings unified approach to certain topics which arefamiliar to you such as
I coordinate geometry
I vector algebra.
Apart from playing a very crucial role in the basic understanding of the calculus ofseveral variables, Linear Algebra has its own importance with applications inalmost all scientific studies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 4 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..
At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
Let us lay a proper foundation of Linear Algebra with basic concepts such as
I vector spaces,
I linear transformations,
I linear dependence,
I dimension,
I matrices and determinants etc..At the end, some illustrations of applications to geometric problems will begiven with a brief study of
I conic sections and quadratic surfaces
ARS (IITB) MA106-Linear Algebra January 19, 2011 5 / 59

Introduction
We shall also give an elementary proof of
Fundamental Theorem of Algebra(FTA)using linear algebra that you learn in this course, thus achieving a kind of poeticjustice.For FTA has to be used in a non trivial fashion in Linear algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 6 / 59

Introduction
We shall also give an elementary proof ofFundamental Theorem of Algebra(FTA)
using linear algebra that you learn in this course, thus achieving a kind of poeticjustice.
For FTA has to be used in a non trivial fashion in Linear algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 6 / 59

Introduction
We shall also give an elementary proof ofFundamental Theorem of Algebra(FTA)
using linear algebra that you learn in this course, thus achieving a kind of poeticjustice.For FTA has to be used in a non trivial fashion in Linear algebra.
ARS (IITB) MA106-Linear Algebra January 19, 2011 6 / 59

The Cartesian Coordinate Space
Today let us get familiar with our ‘working space’.
I Thanks to Rene Descartes, (1596-1650) of the fame cogito ergo sum
I The Cartesian coordinate space Rnis the totality of all ordered n-tuples
x := (x1, x2, . . . , xn) of real numbers xi ∈ R.I It is denoted by R× · · · ×R (n factors) or, in short, by Rn
.
I ‘n-vectors’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 7 / 59

The Cartesian Coordinate Space
Today let us get familiar with our ‘working space’.
I Thanks to Rene Descartes, (1596-1650) of the fame cogito ergo sum
I The Cartesian coordinate space Rnis the totality of all ordered n-tuples
x := (x1, x2, . . . , xn) of real numbers xi ∈ R.I It is denoted by R× · · · ×R (n factors) or, in short, by Rn
.
I ‘n-vectors’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 7 / 59

The Cartesian Coordinate Space
Today let us get familiar with our ‘working space’.
I Thanks to Rene Descartes, (1596-1650) of the fame cogito ergo sum
I The Cartesian coordinate space Rnis the totality of all ordered n-tuples
x := (x1, x2, . . . , xn) of real numbers xi ∈ R.
I It is denoted by R× · · · ×R (n factors) or, in short, by Rn.
I ‘n-vectors’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 7 / 59

The Cartesian Coordinate Space
Today let us get familiar with our ‘working space’.
I Thanks to Rene Descartes, (1596-1650) of the fame cogito ergo sum
I The Cartesian coordinate space Rnis the totality of all ordered n-tuples
x := (x1, x2, . . . , xn) of real numbers xi ∈ R.I It is denoted by R× · · · ×R (n factors) or, in short, by Rn
.
I ‘n-vectors’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 7 / 59

The Cartesian Coordinate Space
Today let us get familiar with our ‘working space’.
I Thanks to Rene Descartes, (1596-1650) of the fame cogito ergo sum
I The Cartesian coordinate space Rnis the totality of all ordered n-tuples
x := (x1, x2, . . . , xn) of real numbers xi ∈ R.I It is denoted by R× · · · ×R (n factors) or, in short, by Rn
.
I ‘n-vectors’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 7 / 59
The Cartesian Coordinate Space
Today let us get familiar with our ‘working space’.
I Thanks to Rene Descartes, (1596-1650) of the fame cogito ergo sum
I The Cartesian coordinate space Rnis the totality of all ordered n-tuples
x := (x1, x2, . . . , xn) of real numbers xi ∈ R.I It is denoted by R× · · · ×R (n factors) or, in short, by Rn
.
I ‘n-vectors’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 7 / 59

The Cartesian Coordinate Space
I For n = 1 you see that R1is nothing but the real line and a real number can
also be referred to as a 1-vector, simply denoted bywrite x , r , t, etc.
I Similarly for n = 2 and 3, we can avail of the familiar notation (x , y) ∈ R2
and (x , y , z) ∈ R3etc., respectively.
ARS (IITB) MA106-Linear Algebra January 19, 2011 8 / 59

The Cartesian Coordinate Space
I For n = 1 you see that R1is nothing but the real line and a real number can
also be referred to as a 1-vector, simply denoted bywrite x , r , t, etc.
I Similarly for n = 2 and 3, we can avail of the familiar notation (x , y) ∈ R2
and (x , y , z) ∈ R3etc., respectively.
ARS (IITB) MA106-Linear Algebra January 19, 2011 8 / 59

Cartesian Coordinate Space
I For a point x = (x1, . . . , xn) we refer to xi as the i th coordinate of x.
I For each i = 1, 2, . . . , n, let us denote byπi : Rn −→ R, πi ((x1, . . . , xn)) = πi (x1, . . . , xn) = xi .It is called the i th coordinate function or the i th coordinate projection.
I Observation A function f : A→ Rnis completely determined by the
functions fi = πi ◦ f called the i th component function of f , viz.,f (a) = (f1(a), . . . , fn(a)), ∀ a ∈ A.
I Thus one can expect that the study of functions f : A −→ Rncan be
effectively reduced to the study of functions fi : A −→ R, n of them innumber, and perhaps to the study of their inter-relations.
I Soon we shall see that this is in fact so.
ARS (IITB) MA106-Linear Algebra January 19, 2011 9 / 59

Cartesian Coordinate Space
I For a point x = (x1, . . . , xn) we refer to xi as the i th coordinate of x.
I For each i = 1, 2, . . . , n, let us denote byπi : Rn −→ R, πi ((x1, . . . , xn)) = πi (x1, . . . , xn) = xi .
It is called the i th coordinate function or the i th coordinate projection.
I Observation A function f : A→ Rnis completely determined by the
functions fi = πi ◦ f called the i th component function of f , viz.,f (a) = (f1(a), . . . , fn(a)), ∀ a ∈ A.
I Thus one can expect that the study of functions f : A −→ Rncan be
effectively reduced to the study of functions fi : A −→ R, n of them innumber, and perhaps to the study of their inter-relations.
I Soon we shall see that this is in fact so.
ARS (IITB) MA106-Linear Algebra January 19, 2011 9 / 59

Cartesian Coordinate Space
I For a point x = (x1, . . . , xn) we refer to xi as the i th coordinate of x.
I For each i = 1, 2, . . . , n, let us denote byπi : Rn −→ R, πi ((x1, . . . , xn)) = πi (x1, . . . , xn) = xi .It is called the i th coordinate function or the i th coordinate projection.
I Observation A function f : A→ Rnis completely determined by the
functions fi = πi ◦ f called the i th component function of f , viz.,f (a) = (f1(a), . . . , fn(a)), ∀ a ∈ A.
I Thus one can expect that the study of functions f : A −→ Rncan be
effectively reduced to the study of functions fi : A −→ R, n of them innumber, and perhaps to the study of their inter-relations.
I Soon we shall see that this is in fact so.
ARS (IITB) MA106-Linear Algebra January 19, 2011 9 / 59
Cartesian Coordinate Space
I For a point x = (x1, . . . , xn) we refer to xi as the i th coordinate of x.
I For each i = 1, 2, . . . , n, let us denote byπi : Rn −→ R, πi ((x1, . . . , xn)) = πi (x1, . . . , xn) = xi .It is called the i th coordinate function or the i th coordinate projection.
I Observation A function f : A→ Rnis completely determined by the
functions fi = πi ◦ f called the i th component function of f , viz.,f (a) = (f1(a), . . . , fn(a)), ∀ a ∈ A.
I Thus one can expect that the study of functions f : A −→ Rncan be
effectively reduced to the study of functions fi : A −→ R, n of them innumber, and perhaps to the study of their inter-relations.
I Soon we shall see that this is in fact so.
ARS (IITB) MA106-Linear Algebra January 19, 2011 9 / 59

Cartesian Coordinate Space
I For a point x = (x1, . . . , xn) we refer to xi as the i th coordinate of x.
I For each i = 1, 2, . . . , n, let us denote byπi : Rn −→ R, πi ((x1, . . . , xn)) = πi (x1, . . . , xn) = xi .It is called the i th coordinate function or the i th coordinate projection.
I Observation A function f : A→ Rnis completely determined by the
functions fi = πi ◦ f called the i th component function of f , viz.,f (a) = (f1(a), . . . , fn(a)), ∀ a ∈ A.
I Thus one can expect that the study of functions f : A −→ Rncan be
effectively reduced to the study of functions fi : A −→ R, n of them innumber, and perhaps to the study of their inter-relations.
I Soon we shall see that this is in fact so.
ARS (IITB) MA106-Linear Algebra January 19, 2011 9 / 59

Cartesian Coordinate Space
I For a point x = (x1, . . . , xn) we refer to xi as the i th coordinate of x.
I For each i = 1, 2, . . . , n, let us denote byπi : Rn −→ R, πi ((x1, . . . , xn)) = πi (x1, . . . , xn) = xi .It is called the i th coordinate function or the i th coordinate projection.
I Observation A function f : A→ Rnis completely determined by the
functions fi = πi ◦ f called the i th component function of f , viz.,f (a) = (f1(a), . . . , fn(a)), ∀ a ∈ A.
I Thus one can expect that the study of functions f : A −→ Rncan be
effectively reduced to the study of functions fi : A −→ R, n of them innumber, and perhaps to the study of their inter-relations.
I Soon we shall see that this is in fact so.
ARS (IITB) MA106-Linear Algebra January 19, 2011 9 / 59

Cartesian Coordiante Space
I For n < m we can think of Rnas a subset of Rm
in various ways.
I One such standard way is to identify it with the set of points y of Rmwhose
last m − n coordinates are identically zero.
I Indeed, the ‘inclusion map’ (x1, . . . , xn) 7→ (x1, . . . , xn, 0, . . . 0) defines suchan identification.
I In particular, if n = 1, then we get the m coordinate axes of Rmfor
i = 1, 2, . . . ,m.
x 7→ (0, . . . , 0, x , 0, . . . , 0)
the variable x being put in the i th slot.
ARS (IITB) MA106-Linear Algebra January 19, 2011 10 / 59

Cartesian Coordiante Space
I For n < m we can think of Rnas a subset of Rm
in various ways.
I One such standard way is to identify it with the set of points y of Rmwhose
last m − n coordinates are identically zero.
I Indeed, the ‘inclusion map’ (x1, . . . , xn) 7→ (x1, . . . , xn, 0, . . . 0) defines suchan identification.
I In particular, if n = 1, then we get the m coordinate axes of Rmfor
i = 1, 2, . . . ,m.
x 7→ (0, . . . , 0, x , 0, . . . , 0)
the variable x being put in the i th slot.
ARS (IITB) MA106-Linear Algebra January 19, 2011 10 / 59

Cartesian Coordiante Space
I For n < m we can think of Rnas a subset of Rm
in various ways.
I One such standard way is to identify it with the set of points y of Rmwhose
last m − n coordinates are identically zero.
I Indeed, the ‘inclusion map’ (x1, . . . , xn) 7→ (x1, . . . , xn, 0, . . . 0) defines suchan identification.
I In particular, if n = 1, then we get the m coordinate axes of Rmfor
i = 1, 2, . . . ,m.
x 7→ (0, . . . , 0, x , 0, . . . , 0)
the variable x being put in the i th slot.
ARS (IITB) MA106-Linear Algebra January 19, 2011 10 / 59

Cartesian Coordiante Space
I For n < m we can think of Rnas a subset of Rm
in various ways.
I One such standard way is to identify it with the set of points y of Rmwhose
last m − n coordinates are identically zero.
I Indeed, the ‘inclusion map’ (x1, . . . , xn) 7→ (x1, . . . , xn, 0, . . . 0) defines suchan identification.
I In particular, if n = 1, then we get the m coordinate axes of Rmfor
i = 1, 2, . . . ,m.
x 7→ (0, . . . , 0, x , 0, . . . , 0)
the variable x being put in the i th slot.
ARS (IITB) MA106-Linear Algebra January 19, 2011 10 / 59

Cartesian Coordinate Space
We presume that you are familiar with basic set theoretic concepts such as:
I domain co-domain of a function,
I image and inverse image of sets under functions,
I composition of functions,
I inverse of a function, etc..
A good reference for this is the I-volume of Apostol’s Calculus.
ARS (IITB) MA106-Linear Algebra January 19, 2011 11 / 59

Cartesian Coordinate Space
We presume that you are familiar with basic set theoretic concepts such as:
I domain co-domain of a function,
I image and inverse image of sets under functions,
I composition of functions,
I inverse of a function, etc..
A good reference for this is the I-volume of Apostol’s Calculus.
ARS (IITB) MA106-Linear Algebra January 19, 2011 11 / 59

Cartesian Coordinate Space
Example
I Letf (x , y) = (x2y , x + y); g(x , y) = (cos(x + y), sin(x/y)).
I Domain of f is the whole of R2, whereas that of g is R2 \ {(x , 0) : x ∈ R}.
I Neither f ◦ g nor g ◦ f is defined on the whole of R2.
I But if we restrict the domain of f to R2 \ {(x , y) : x + y = 0}, then g ◦ f isdefined.
I In that case we have, g ◦ f (x , y) = (cos(x2y + x + y), sin(x2y/x + y)).
I Can you determine the natural domain for f ◦ g and write down theexpression for it?
ARS (IITB) MA106-Linear Algebra January 19, 2011 12 / 59

Cartesian Coordinate Space
Example
I Letf (x , y) = (x2y , x + y); g(x , y) = (cos(x + y), sin(x/y)).
I Domain of f is the whole of R2, whereas that of g is R2 \ {(x , 0) : x ∈ R}.
I Neither f ◦ g nor g ◦ f is defined on the whole of R2.
I But if we restrict the domain of f to R2 \ {(x , y) : x + y = 0}, then g ◦ f isdefined.
I In that case we have, g ◦ f (x , y) = (cos(x2y + x + y), sin(x2y/x + y)).
I Can you determine the natural domain for f ◦ g and write down theexpression for it?
ARS (IITB) MA106-Linear Algebra January 19, 2011 12 / 59

Cartesian Coordinate Space
Example
I Letf (x , y) = (x2y , x + y); g(x , y) = (cos(x + y), sin(x/y)).
I Domain of f is the whole of R2, whereas that of g is R2 \ {(x , 0) : x ∈ R}.
I Neither f ◦ g nor g ◦ f is defined on the whole of R2.
I But if we restrict the domain of f to R2 \ {(x , y) : x + y = 0}, then g ◦ f isdefined.
I In that case we have, g ◦ f (x , y) = (cos(x2y + x + y), sin(x2y/x + y)).
I Can you determine the natural domain for f ◦ g and write down theexpression for it?
ARS (IITB) MA106-Linear Algebra January 19, 2011 12 / 59

Cartesian Coordinate Space
Example
I Letf (x , y) = (x2y , x + y); g(x , y) = (cos(x + y), sin(x/y)).
I Domain of f is the whole of R2, whereas that of g is R2 \ {(x , 0) : x ∈ R}.
I Neither f ◦ g nor g ◦ f is defined on the whole of R2.
I But if we restrict the domain of f to R2 \ {(x , y) : x + y = 0}, then g ◦ f isdefined.
I In that case we have, g ◦ f (x , y) = (cos(x2y + x + y), sin(x2y/x + y)).
I Can you determine the natural domain for f ◦ g and write down theexpression for it?
ARS (IITB) MA106-Linear Algebra January 19, 2011 12 / 59

Cartesian Coordinate Space
Example
I Letf (x , y) = (x2y , x + y); g(x , y) = (cos(x + y), sin(x/y)).
I Domain of f is the whole of R2, whereas that of g is R2 \ {(x , 0) : x ∈ R}.
I Neither f ◦ g nor g ◦ f is defined on the whole of R2.
I But if we restrict the domain of f to R2 \ {(x , y) : x + y = 0}, then g ◦ f isdefined.
I In that case we have, g ◦ f (x , y) = (cos(x2y + x + y), sin(x2y/x + y)).
I Can you determine the natural domain for f ◦ g and write down theexpression for it?
ARS (IITB) MA106-Linear Algebra January 19, 2011 12 / 59

Cartesian Coordinate Space
Example
I Letf (x , y) = (x2y , x + y); g(x , y) = (cos(x + y), sin(x/y)).
I Domain of f is the whole of R2, whereas that of g is R2 \ {(x , 0) : x ∈ R}.
I Neither f ◦ g nor g ◦ f is defined on the whole of R2.
I But if we restrict the domain of f to R2 \ {(x , y) : x + y = 0}, then g ◦ f isdefined.
I In that case we have, g ◦ f (x , y) = (cos(x2y + x + y), sin(x2y/x + y)).
I Can you determine the natural domain for f ◦ g and write down theexpression for it?
ARS (IITB) MA106-Linear Algebra January 19, 2011 12 / 59

Another Example
Example
Let N = {1, 2, . . . , n} be the set of first n natural numbers. Consider the cartesianproduct of n copies of N :
Nn = N × · · · × N
I How many elements does Nn has?
I Next consider the set S(n) of all sequences of length n with values in{1, 2, . . . , n}.
I Can you see any relation between Nn and S(n)? Further look at the setF (N,N) of all functions from N to N. Is there any relation between this setand the earlier two?
I Indeed, there are natural ways of getting one-to-one mappings of any one ofthese three sets into another.
I Let Σ(n) denote the subset of F (N,N) which are one-to-one. What does itcorrespond to in Nn and S(n)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 13 / 59

Another Example
Example
Let N = {1, 2, . . . , n} be the set of first n natural numbers. Consider the cartesianproduct of n copies of N :
Nn = N × · · · × N
I How many elements does Nn has?
I Next consider the set S(n) of all sequences of length n with values in{1, 2, . . . , n}.
I Can you see any relation between Nn and S(n)? Further look at the setF (N,N) of all functions from N to N. Is there any relation between this setand the earlier two?
I Indeed, there are natural ways of getting one-to-one mappings of any one ofthese three sets into another.
I Let Σ(n) denote the subset of F (N,N) which are one-to-one. What does itcorrespond to in Nn and S(n)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 13 / 59

Another Example
Example
Let N = {1, 2, . . . , n} be the set of first n natural numbers. Consider the cartesianproduct of n copies of N :
Nn = N × · · · × N
I How many elements does Nn has?
I Next consider the set S(n) of all sequences of length n with values in{1, 2, . . . , n}.
I Can you see any relation between Nn and S(n)? Further look at the setF (N,N) of all functions from N to N. Is there any relation between this setand the earlier two?
I Indeed, there are natural ways of getting one-to-one mappings of any one ofthese three sets into another.
I Let Σ(n) denote the subset of F (N,N) which are one-to-one. What does itcorrespond to in Nn and S(n)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 13 / 59

Another Example
Example
Let N = {1, 2, . . . , n} be the set of first n natural numbers. Consider the cartesianproduct of n copies of N :
Nn = N × · · · × N
I How many elements does Nn has?
I Next consider the set S(n) of all sequences of length n with values in{1, 2, . . . , n}.
I Can you see any relation between Nn and S(n)? Further look at the setF (N,N) of all functions from N to N. Is there any relation between this setand the earlier two?
I Indeed, there are natural ways of getting one-to-one mappings of any one ofthese three sets into another.
I Let Σ(n) denote the subset of F (N,N) which are one-to-one. What does itcorrespond to in Nn and S(n)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 13 / 59
Another Example
Example
Let N = {1, 2, . . . , n} be the set of first n natural numbers. Consider the cartesianproduct of n copies of N :
Nn = N × · · · × N
I How many elements does Nn has?
I Next consider the set S(n) of all sequences of length n with values in{1, 2, . . . , n}.
I Can you see any relation between Nn and S(n)? Further look at the setF (N,N) of all functions from N to N. Is there any relation between this setand the earlier two?
I Indeed, there are natural ways of getting one-to-one mappings of any one ofthese three sets into another.
I Let Σ(n) denote the subset of F (N,N) which are one-to-one. What does itcorrespond to in Nn and S(n)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 13 / 59

Another Example
Example
Let N = {1, 2, . . . , n} be the set of first n natural numbers. Consider the cartesianproduct of n copies of N :
Nn = N × · · · × N
I How many elements does Nn has?
I Next consider the set S(n) of all sequences of length n with values in{1, 2, . . . , n}.
I Can you see any relation between Nn and S(n)? Further look at the setF (N,N) of all functions from N to N. Is there any relation between this setand the earlier two?
I Indeed, there are natural ways of getting one-to-one mappings of any one ofthese three sets into another.
I Let Σ(n) denote the subset of F (N,N) which are one-to-one. What does itcorrespond to in Nn and S(n)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 13 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that
(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and
(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b.
Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that
(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;
(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Some Open Exercises
I (i) Let ψ(x , y) = (x + y2, y + x2 + 2xy2 + y4). Is ψ a bijective map?
I (ii) (Here is an optional exercise which you can take up as a challenge. Donot consult the tutors for the solution, since they have been told not to helpyou with this problem. If you have solved it you may directly contact yourInstructor.)
Let f : R2 −→ R be a nonconstant continuous map. Then there exist−∞ ≤ a < b ≤ ∞ such that(i) for all a < r < b, f −1(r) is infinite and(ii) f −1(r) = ∅, for r < a and r > b. Hence or otherwise prove that(a) for every positive integer n, there exist at least n points which aremapped to the same point by f ;(b) if f is surjective then f −1(r) is infinite for all r ∈ R.(c) Finally construct a continuous map R2 −→ R to illustrate thatimprovement on this statement is not possible. Explicitly, find a continuous
function f : R2 −→ R such that f −1(−1) = {−1} and f −1(1) = {1}.
ARS (IITB) MA106-Linear Algebra January 19, 2011 14 / 59

Algebraic Structure of Rn
Some of the algebraic structures of the real numbers induce similar structure onRn
.
The most important amongst them is the ‘sum’ or ‘addition.’ Given twon-vectors x = (x1, . . . , xn) and y = (y1, . . . , yn) we define their sum
x + y = (x1 + y1, . . . , xn + yn).
It is straightforward to verify that this addition obeys all the usual laws that theaddition of real numbers obey. In particular, observe that the zero element for thissum is the zero vector 0 = (0, . . . , 0) and the negative of (x1, . . . , xn) is(−x1, . . . ,−xn).What about ‘multiplication’?
xy := (x1y1, . . . , xnyn)??
Scalar multiplication: for each real number α and a vector x, we define
αx = (αx1, . . . , αxn).
ARS (IITB) MA106-Linear Algebra January 19, 2011 15 / 59

Algebraic Structure of Rn
Some of the algebraic structures of the real numbers induce similar structure onRn
.The most important amongst them is the ‘sum’ or ‘addition.’ Given twon-vectors x = (x1, . . . , xn) and y = (y1, . . . , yn) we define their sum
x + y = (x1 + y1, . . . , xn + yn).
It is straightforward to verify that this addition obeys all the usual laws that theaddition of real numbers obey. In particular, observe that the zero element for thissum is the zero vector 0 = (0, . . . , 0) and the negative of (x1, . . . , xn) is(−x1, . . . ,−xn).What about ‘multiplication’?
xy := (x1y1, . . . , xnyn)??
Scalar multiplication: for each real number α and a vector x, we define
αx = (αx1, . . . , αxn).
ARS (IITB) MA106-Linear Algebra January 19, 2011 15 / 59

Algebraic Structure of Rn
Some of the algebraic structures of the real numbers induce similar structure onRn
.The most important amongst them is the ‘sum’ or ‘addition.’ Given twon-vectors x = (x1, . . . , xn) and y = (y1, . . . , yn) we define their sum
x + y = (x1 + y1, . . . , xn + yn).
It is straightforward to verify that this addition obeys all the usual laws that theaddition of real numbers obey. In particular, observe that the zero element for thissum is the zero vector 0 = (0, . . . , 0) and the negative of (x1, . . . , xn) is(−x1, . . . ,−xn).
What about ‘multiplication’?
xy := (x1y1, . . . , xnyn)??
Scalar multiplication: for each real number α and a vector x, we define
αx = (αx1, . . . , αxn).
ARS (IITB) MA106-Linear Algebra January 19, 2011 15 / 59

Algebraic Structure of Rn
Some of the algebraic structures of the real numbers induce similar structure onRn
.The most important amongst them is the ‘sum’ or ‘addition.’ Given twon-vectors x = (x1, . . . , xn) and y = (y1, . . . , yn) we define their sum
x + y = (x1 + y1, . . . , xn + yn).
It is straightforward to verify that this addition obeys all the usual laws that theaddition of real numbers obey. In particular, observe that the zero element for thissum is the zero vector 0 = (0, . . . , 0) and the negative of (x1, . . . , xn) is(−x1, . . . ,−xn).What about ‘multiplication’?
xy := (x1y1, . . . , xnyn)??
Scalar multiplication: for each real number α and a vector x, we define
αx = (αx1, . . . , αxn).
ARS (IITB) MA106-Linear Algebra January 19, 2011 15 / 59

Algebraic Structure of Rn
Some of the algebraic structures of the real numbers induce similar structure onRn
.The most important amongst them is the ‘sum’ or ‘addition.’ Given twon-vectors x = (x1, . . . , xn) and y = (y1, . . . , yn) we define their sum
x + y = (x1 + y1, . . . , xn + yn).
It is straightforward to verify that this addition obeys all the usual laws that theaddition of real numbers obey. In particular, observe that the zero element for thissum is the zero vector 0 = (0, . . . , 0) and the negative of (x1, . . . , xn) is(−x1, . . . ,−xn).What about ‘multiplication’?
xy := (x1y1, . . . , xnyn)??
Scalar multiplication: for each real number α and a vector x, we define
αx = (αx1, . . . , αxn).
ARS (IITB) MA106-Linear Algebra January 19, 2011 15 / 59

Algebraic Structure on Rn
It is
I 1. associative: α(βx) = (αβ)x;
I 2. distributes with the sum: α(x + y) = αx + αy, and (α + β)x = αx + βx;
I 3. and has an identity element 1x = x.
In particular, we also observe that, if n = 1, then these two operations coincidewith the usual addition and multiplication.
ARS (IITB) MA106-Linear Algebra January 19, 2011 16 / 59

Algebraic Structure on Rn
It is
I 1. associative: α(βx) = (αβ)x;
I 2. distributes with the sum: α(x + y) = αx + αy, and (α + β)x = αx + βx;
I 3. and has an identity element 1x = x.
In particular, we also observe that, if n = 1, then these two operations coincidewith the usual addition and multiplication.
ARS (IITB) MA106-Linear Algebra January 19, 2011 16 / 59

Algebraic Structure on Rn
It is
I 1. associative: α(βx) = (αβ)x;
I 2. distributes with the sum: α(x + y) = αx + αy, and (α + β)x = αx + βx;
I 3. and has an identity element 1x = x.
In particular, we also observe that, if n = 1, then these two operations coincidewith the usual addition and multiplication.
ARS (IITB) MA106-Linear Algebra January 19, 2011 16 / 59

Algebraic Structure on Rn
It is
I 1. associative: α(βx) = (αβ)x;
I 2. distributes with the sum: α(x + y) = αx + αy, and (α + β)x = αx + βx;
I 3. and has an identity element 1x = x.
In particular, we also observe that, if n = 1, then these two operations coincidewith the usual addition and multiplication.
ARS (IITB) MA106-Linear Algebra January 19, 2011 16 / 59
Algebraic Structure on Rn
It is
I 1. associative: α(βx) = (αβ)x;
I 2. distributes with the sum: α(x + y) = αx + αy, and (α + β)x = αx + βx;
I 3. and has an identity element 1x = x.
In particular, we also observe that, if n = 1, then these two operations coincidewith the usual addition and multiplication.
ARS (IITB) MA106-Linear Algebra January 19, 2011 16 / 59

The Geometry of Rn
Before starting of with any sort of geometry or calculus, we need one moreimportant ingredient viz., the distance function on Rn
.
For any two pointsx, y ∈ Rn
as above, we define the distance between x and y by
d(x, y) =
√√√√ n∑i=1
(xi − yi )2.
Indeed, the distance function is closely related to the dot product
(x, y) 7→ x · y :=∑
i
xiyi .
One defines the norm function by
‖x‖ := d(x, 0) =
√√√√ n∑i
x2i =√
x · x.
Then it follows that d(x, y) = ‖x− y‖. (Such a distance function is called a linearmetric.
ARS (IITB) MA106-Linear Algebra January 19, 2011 17 / 59

The Geometry of Rn
Before starting of with any sort of geometry or calculus, we need one moreimportant ingredient viz., the distance function on Rn
. For any two pointsx, y ∈ Rn
as above, we define the distance between x and y by
d(x, y) =
√√√√ n∑i=1
(xi − yi )2.
Indeed, the distance function is closely related to the dot product
(x, y) 7→ x · y :=∑
i
xiyi .
One defines the norm function by
‖x‖ := d(x, 0) =
√√√√ n∑i
x2i =√
x · x.
Then it follows that d(x, y) = ‖x− y‖. (Such a distance function is called a linearmetric.
ARS (IITB) MA106-Linear Algebra January 19, 2011 17 / 59
The Geometry of Rn
Before starting of with any sort of geometry or calculus, we need one moreimportant ingredient viz., the distance function on Rn
. For any two pointsx, y ∈ Rn
as above, we define the distance between x and y by
d(x, y) =
√√√√ n∑i=1
(xi − yi )2.
Indeed, the distance function is closely related to the dot product
(x, y) 7→ x · y :=∑
i
xiyi .
One defines the norm function by
‖x‖ := d(x, 0) =
√√√√ n∑i
x2i =√
x · x.
Then it follows that d(x, y) = ‖x− y‖. (Such a distance function is called a linearmetric.
ARS (IITB) MA106-Linear Algebra January 19, 2011 17 / 59

The Geometry of Rn
Before starting of with any sort of geometry or calculus, we need one moreimportant ingredient viz., the distance function on Rn
. For any two pointsx, y ∈ Rn
as above, we define the distance between x and y by
d(x, y) =
√√√√ n∑i=1
(xi − yi )2.
Indeed, the distance function is closely related to the dot product
(x, y) 7→ x · y :=∑
i
xiyi .
One defines the norm function by
‖x‖ := d(x, 0) =
√√√√ n∑i
x2i =√
x · x.
Then it follows that d(x, y) = ‖x− y‖. (Such a distance function is called a linearmetric.
ARS (IITB) MA106-Linear Algebra January 19, 2011 17 / 59

The Geometry of Rn
Before starting of with any sort of geometry or calculus, we need one moreimportant ingredient viz., the distance function on Rn
. For any two pointsx, y ∈ Rn
as above, we define the distance between x and y by
d(x, y) =
√√√√ n∑i=1
(xi − yi )2.
Indeed, the distance function is closely related to the dot product
(x, y) 7→ x · y :=∑
i
xiyi .
One defines the norm function by
‖x‖ := d(x, 0) =
√√√√ n∑i
x2i =√
x · x.
Then it follows that d(x, y) = ‖x− y‖. (Such a distance function is called a linearmetric.
ARS (IITB) MA106-Linear Algebra January 19, 2011 17 / 59

Euclidean Distance
You are already familiar with various properties of this function such as
I (d1) symmetry: d(x, y) = d(y, x);
I (d2) triangle inequality: d(x, y) ≤ d(x,w) + d(w, y);
I (d3) positivity: d(x, y) ≥ 0 and = 0 if and only if x = y.Moreover, we also have
I (d4) homogeneity: d(αx, αy) = |α|d(x, y).
ARS (IITB) MA106-Linear Algebra January 19, 2011 18 / 59

Euclidean Distance
You are already familiar with various properties of this function such as
I (d1) symmetry: d(x, y) = d(y, x);
I (d2) triangle inequality: d(x, y) ≤ d(x,w) + d(w, y);
I (d3) positivity: d(x, y) ≥ 0 and = 0 if and only if x = y.Moreover, we also have
I (d4) homogeneity: d(αx, αy) = |α|d(x, y).
ARS (IITB) MA106-Linear Algebra January 19, 2011 18 / 59

Euclidean Distance
You are already familiar with various properties of this function such as
I (d1) symmetry: d(x, y) = d(y, x);
I (d2) triangle inequality: d(x, y) ≤ d(x,w) + d(w, y);
I (d3) positivity: d(x, y) ≥ 0 and = 0 if and only if x = y.Moreover, we also have
I (d4) homogeneity: d(αx, αy) = |α|d(x, y).
ARS (IITB) MA106-Linear Algebra January 19, 2011 18 / 59

Euclidean Distance
You are already familiar with various properties of this function such as
I (d1) symmetry: d(x, y) = d(y, x);
I (d2) triangle inequality: d(x, y) ≤ d(x,w) + d(w, y);
I (d3) positivity: d(x, y) ≥ 0 and = 0 if and only if x = y.
Moreover, we also have
I (d4) homogeneity: d(αx, αy) = |α|d(x, y).
ARS (IITB) MA106-Linear Algebra January 19, 2011 18 / 59

Euclidean Distance
You are already familiar with various properties of this function such as
I (d1) symmetry: d(x, y) = d(y, x);
I (d2) triangle inequality: d(x, y) ≤ d(x,w) + d(w, y);
I (d3) positivity: d(x, y) ≥ 0 and = 0 if and only if x = y.Moreover, we also have
I (d4) homogeneity: d(αx, αy) = |α|d(x, y).
ARS (IITB) MA106-Linear Algebra January 19, 2011 18 / 59

Geometric Aspects of Rn
All these properties are standard and can be verified easily.
For instance, in the proof of triangle inequality, we can use the famousCauchy-Schwarz inequality:
|x · y| ≤ ‖x‖‖y‖ (1)
The space Rntogether with the two algebraic structures and the distance
function d is called the n-dimensional euclidean space. This is going to be ourwork-space for quite some time.You are quite familiar with the case n = 2 and n = 3. Most of the concepts youhave met in these two special cases have appropriate and obvious generalizationsfor all n. However some caution is necessary, particularly while relying on ‘pictures’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 19 / 59

Geometric Aspects of Rn
All these properties are standard and can be verified easily.For instance, in the proof of triangle inequality, we can use the famousCauchy-Schwarz inequality:
|x · y| ≤ ‖x‖‖y‖ (1)
The space Rntogether with the two algebraic structures and the distance
function d is called the n-dimensional euclidean space. This is going to be ourwork-space for quite some time.You are quite familiar with the case n = 2 and n = 3. Most of the concepts youhave met in these two special cases have appropriate and obvious generalizationsfor all n. However some caution is necessary, particularly while relying on ‘pictures’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 19 / 59

Geometric Aspects of Rn
All these properties are standard and can be verified easily.For instance, in the proof of triangle inequality, we can use the famousCauchy-Schwarz inequality:
|x · y| ≤ ‖x‖‖y‖ (1)
The space Rntogether with the two algebraic structures and the distance
function d is called the n-dimensional euclidean space. This is going to be ourwork-space for quite some time.You are quite familiar with the case n = 2 and n = 3. Most of the concepts youhave met in these two special cases have appropriate and obvious generalizationsfor all n. However some caution is necessary, particularly while relying on ‘pictures’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 19 / 59

Geometric Aspects of Rn
All these properties are standard and can be verified easily.For instance, in the proof of triangle inequality, we can use the famousCauchy-Schwarz inequality:
|x · y| ≤ ‖x‖‖y‖ (1)
The space Rntogether with the two algebraic structures and the distance
function d is called the n-dimensional euclidean space. This is going to be ourwork-space for quite some time.You are quite familiar with the case n = 2 and n = 3. Most of the concepts youhave met in these two special cases have appropriate and obvious generalizationsfor all n. However some caution is necessary, particularly while relying on ‘pictures’.
ARS (IITB) MA106-Linear Algebra January 19, 2011 19 / 59

A non-Eclidean Example
Define
δ(x, y) =n∑
i=1
|xi − yi |
andD(x, y) = max {|xi − yi | : 1 ≤ i ≤ n}.
Show that δ,D satisfy properties (d1), (d2), (d3) above in place of d .
ARS (IITB) MA106-Linear Algebra January 19, 2011 20 / 59

Another non-Euclidean Example
On the set of 64 squares of a chess board define the distance d from one squareto another to be the least number of knight moves required. Check that thisdistance function satisfy (d1), (d2), (d3). Determine the diameter of the chessboard with respect to this distance where diameter of a space is the supremum ofall values of d .
ARS (IITB) MA106-Linear Algebra January 19, 2011 21 / 59

Coins in a SquareHere is an example to show that it is not advisable to rely too much on intuitionwhen dealing with higher dimensions. Consider a square of side 4 units and placefour coins of unit radius one in each corner so as to touch two of the sides. Ofcourse each coin touches other two coins. Now place a coin at the center of thesquare so as to touch all the four coins.
Notice that if you are a 2-dimensional bug outside the box,, even if the box is notthere, you cannot go and touch the central coin.
ARS (IITB) MA106-Linear Algebra January 19, 2011 22 / 59

Coins in a SquareHere is an example to show that it is not advisable to rely too much on intuitionwhen dealing with higher dimensions. Consider a square of side 4 units and placefour coins of unit radius one in each corner so as to touch two of the sides. Ofcourse each coin touches other two coins. Now place a coin at the center of thesquare so as to touch all the four coins.
Notice that if you are a 2-dimensional bug outside the box,, even if the box is notthere, you cannot go and touch the central coin.
ARS (IITB) MA106-Linear Algebra January 19, 2011 22 / 59

Coins in a SquareHere is an example to show that it is not advisable to rely too much on intuitionwhen dealing with higher dimensions. Consider a square of side 4 units and placefour coins of unit radius one in each corner so as to touch two of the sides. Ofcourse each coin touches other two coins. Now place a coin at the center of thesquare so as to touch all the four coins.
Notice that if you are a 2-dimensional bug outside the box,, even if the box is notthere, you cannot go and touch the central coin.
ARS (IITB) MA106-Linear Algebra January 19, 2011 22 / 59

Coins in a Square-continued
Do this in the 3-dimensional space with 8-balls of radius 1. What is the radius ofthe central ball? Can you touch it from outside?
Do this inside a n-dimensional cube of side 4 units with 2n n-dimensional balls ofunit radius. For n = 2, . . . , 9 the central ball which is kept touching all the balls inthe corner lies inside the cube. The surprise is that for n > 9 the central ballcannot fit inside the cube. Prove this by showing that the radius of the centralball is
√n − 1.
ARS (IITB) MA106-Linear Algebra January 19, 2011 23 / 59
Coins in a Square-continued
Do this in the 3-dimensional space with 8-balls of radius 1. What is the radius ofthe central ball? Can you touch it from outside?Do this inside a n-dimensional cube of side 4 units with 2n n-dimensional balls ofunit radius. For n = 2, . . . , 9 the central ball which is kept touching all the balls inthe corner lies inside the cube. The surprise is that for n > 9 the central ballcannot fit inside the cube. Prove this by showing that the radius of the centralball is
√n − 1.
ARS (IITB) MA106-Linear Algebra January 19, 2011 23 / 59

Linear Maps: Basic Definitions and Examples
An important class of functions from Rnto Rm
are the so called lineartransformations. Though this word makes sense even in a larger context, we shallfirst study them on euclidean spaces.
Definition
A function f : Rn −→ Rmis said to be a linear map if
f (αx + βy) = αf (x) + βf (y), for all scalars α, β ∈ R and all vectors x, y ∈ Rn.
Equivalently, this can also be said in the following way:1. f (x + y) = f (x) + f (y) (additivity).2. f (αx) = αf (x)(homogeneity).
ARS (IITB) MA106-Linear Algebra January 19, 2011 24 / 59

Linear Maps: Basic Definitions and Examples
An important class of functions from Rnto Rm
are the so called lineartransformations. Though this word makes sense even in a larger context, we shallfirst study them on euclidean spaces.
Definition
A function f : Rn −→ Rmis said to be a linear map if
f (αx + βy) = αf (x) + βf (y), for all scalars α, β ∈ R and all vectors x, y ∈ Rn.
Equivalently, this can also be said in the following way:1. f (x + y) = f (x) + f (y) (additivity).2. f (αx) = αf (x)(homogeneity).
ARS (IITB) MA106-Linear Algebra January 19, 2011 24 / 59

Linear transformations
Exercise: Show that if f is a linear map then f (∑k
i=1 αixi ) =∑k
i=1 αi f (xi ).
Example
Examples of linear maps are easy to produce.
I The projection maps πi , the inclusion maps etc. which we have just seen arethe standard examples.
I The identity map, the zero map and multiplication by a fixed scalar α arealso linear.
I More generally, taking dot product with a fixed vector is a linear mapRn −→ R.
I Indeed, we shall soon see that any linear map Rn −→ R corresponds totaking dot product with a unique vector in Rn
.
I Finally, a map f : Rn −→ Rmis linear if and only if its component maps
fi : Rn −→ R are all linear. In this way, we will be able to determine all linearmaps Rn −→ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 25 / 59

Linear transformations
Exercise: Show that if f is a linear map then f (∑k
i=1 αixi ) =∑k
i=1 αi f (xi ).
Example
Examples of linear maps are easy to produce.
I The projection maps πi , the inclusion maps etc. which we have just seen arethe standard examples.
I The identity map, the zero map and multiplication by a fixed scalar α arealso linear.
I More generally, taking dot product with a fixed vector is a linear mapRn −→ R.
I Indeed, we shall soon see that any linear map Rn −→ R corresponds totaking dot product with a unique vector in Rn
.
I Finally, a map f : Rn −→ Rmis linear if and only if its component maps
fi : Rn −→ R are all linear. In this way, we will be able to determine all linearmaps Rn −→ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 25 / 59

Linear transformations
Exercise: Show that if f is a linear map then f (∑k
i=1 αixi ) =∑k
i=1 αi f (xi ).
Example
Examples of linear maps are easy to produce.
I The projection maps πi , the inclusion maps etc. which we have just seen arethe standard examples.
I The identity map, the zero map and multiplication by a fixed scalar α arealso linear.
I More generally, taking dot product with a fixed vector is a linear mapRn −→ R.
I Indeed, we shall soon see that any linear map Rn −→ R corresponds totaking dot product with a unique vector in Rn
.
I Finally, a map f : Rn −→ Rmis linear if and only if its component maps
fi : Rn −→ R are all linear. In this way, we will be able to determine all linearmaps Rn −→ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 25 / 59

Linear transformations
Exercise: Show that if f is a linear map then f (∑k
i=1 αixi ) =∑k
i=1 αi f (xi ).
Example
Examples of linear maps are easy to produce.
I The projection maps πi , the inclusion maps etc. which we have just seen arethe standard examples.
I The identity map, the zero map and multiplication by a fixed scalar α arealso linear.
I More generally, taking dot product with a fixed vector is a linear mapRn −→ R.
I Indeed, we shall soon see that any linear map Rn −→ R corresponds totaking dot product with a unique vector in Rn
.
I Finally, a map f : Rn −→ Rmis linear if and only if its component maps
fi : Rn −→ R are all linear. In this way, we will be able to determine all linearmaps Rn −→ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 25 / 59

Linear transformations
Exercise: Show that if f is a linear map then f (∑k
i=1 αixi ) =∑k
i=1 αi f (xi ).
Example
Examples of linear maps are easy to produce.
I The projection maps πi , the inclusion maps etc. which we have just seen arethe standard examples.
I The identity map, the zero map and multiplication by a fixed scalar α arealso linear.
I More generally, taking dot product with a fixed vector is a linear mapRn −→ R.
I Indeed, we shall soon see that any linear map Rn −→ R corresponds totaking dot product with a unique vector in Rn
.
I Finally, a map f : Rn −→ Rmis linear if and only if its component maps
fi : Rn −→ R are all linear. In this way, we will be able to determine all linearmaps Rn −→ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 25 / 59

Linear transformations
Exercise: Show that if f is a linear map then f (∑k
i=1 αixi ) =∑k
i=1 αi f (xi ).
Example
Examples of linear maps are easy to produce.
I The projection maps πi , the inclusion maps etc. which we have just seen arethe standard examples.
I The identity map, the zero map and multiplication by a fixed scalar α arealso linear.
I More generally, taking dot product with a fixed vector is a linear mapRn −→ R.
I Indeed, we shall soon see that any linear map Rn −→ R corresponds totaking dot product with a unique vector in Rn
.
I Finally, a map f : Rn −→ Rmis linear if and only if its component maps
fi : Rn −→ R are all linear. In this way, we will be able to determine all linearmaps Rn −→ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 25 / 59

Linear transformations
ExampleI Distance travelled is a linear function of time when velocity is constant.
I So is the voltage as a function of resistance when the current is constant.
I The logarithm of the change in concentration in any first order chemicalreaction is a linear function of time.
I Non examples are even easier to produce. On R, |x |, xn(n ≥ 2), sin x etc. areeasily seen to be non linear maps.
I Gravitational force between two bodies is not a linear function of the distancebetween the two bodies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 26 / 59

Linear transformations
ExampleI Distance travelled is a linear function of time when velocity is constant.
I So is the voltage as a function of resistance when the current is constant.
I The logarithm of the change in concentration in any first order chemicalreaction is a linear function of time.
I Non examples are even easier to produce. On R, |x |, xn(n ≥ 2), sin x etc. areeasily seen to be non linear maps.
I Gravitational force between two bodies is not a linear function of the distancebetween the two bodies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 26 / 59

Linear transformations
ExampleI Distance travelled is a linear function of time when velocity is constant.
I So is the voltage as a function of resistance when the current is constant.
I The logarithm of the change in concentration in any first order chemicalreaction is a linear function of time.
I Non examples are even easier to produce. On R, |x |, xn(n ≥ 2), sin x etc. areeasily seen to be non linear maps.
I Gravitational force between two bodies is not a linear function of the distancebetween the two bodies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 26 / 59

Linear transformations
ExampleI Distance travelled is a linear function of time when velocity is constant.
I So is the voltage as a function of resistance when the current is constant.
I The logarithm of the change in concentration in any first order chemicalreaction is a linear function of time.
I Non examples are even easier to produce. On R, |x |, xn(n ≥ 2), sin x etc. areeasily seen to be non linear maps.
I Gravitational force between two bodies is not a linear function of the distancebetween the two bodies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 26 / 59

Linear transformations
ExampleI Distance travelled is a linear function of time when velocity is constant.
I So is the voltage as a function of resistance when the current is constant.
I The logarithm of the change in concentration in any first order chemicalreaction is a linear function of time.
I Non examples are even easier to produce. On R, |x |, xn(n ≥ 2), sin x etc. areeasily seen to be non linear maps.
I Gravitational force between two bodies is not a linear function of the distancebetween the two bodies.
ARS (IITB) MA106-Linear Algebra January 19, 2011 26 / 59

Linear transformations
Exercises:
I (i) Show that the projection on a line L passing through the origin defines a
linear map of R2to R2
and its image is equal to L.
I (ii) Show that rotation through a fixed angle θ is a linear map, R2 −→ R2.
I (iii) By a rigid motion of Rnwe mean a map f : Rn −→ Rn
such that
d(f (x), f (y)) = d(x , y). Show that a rigid motion of R3which fixes the
origin is a linear map.
ARS (IITB) MA106-Linear Algebra January 19, 2011 27 / 59

Linear transformations
Exercises:
I (i) Show that the projection on a line L passing through the origin defines a
linear map of R2to R2
and its image is equal to L.
I (ii) Show that rotation through a fixed angle θ is a linear map, R2 −→ R2.
I (iii) By a rigid motion of Rnwe mean a map f : Rn −→ Rn
such that
d(f (x), f (y)) = d(x , y). Show that a rigid motion of R3which fixes the
origin is a linear map.
ARS (IITB) MA106-Linear Algebra January 19, 2011 27 / 59

Linear transformations
Exercises:
I (i) Show that the projection on a line L passing through the origin defines a
linear map of R2to R2
and its image is equal to L.
I (ii) Show that rotation through a fixed angle θ is a linear map, R2 −→ R2.
I (iii) By a rigid motion of Rnwe mean a map f : Rn −→ Rn
such that
d(f (x), f (y)) = d(x , y). Show that a rigid motion of R3which fixes the
origin is a linear map.
ARS (IITB) MA106-Linear Algebra January 19, 2011 27 / 59

Linear transformations
Exercises:
I (i) Show that the projection on a line L passing through the origin defines a
linear map of R2to R2
and its image is equal to L.
I (ii) Show that rotation through a fixed angle θ is a linear map, R2 −→ R2.
I (iii) By a rigid motion of Rnwe mean a map f : Rn −→ Rn
such that
d(f (x), f (y)) = d(x , y). Show that a rigid motion of R3which fixes the
origin is a linear map.
ARS (IITB) MA106-Linear Algebra January 19, 2011 27 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).However, we should be careful, while considering such new operations.For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).However, we should be careful, while considering such new operations.For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).However, we should be careful, while considering such new operations.For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).
However, we should be careful, while considering such new operations.For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).However, we should be careful, while considering such new operations.
For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).However, we should be careful, while considering such new operations.For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.
But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59

The Structure of Linear Maps
I Let L(n,m) denote the totality of all the linear maps from Rnto Rm
.
I The algebraic structure on Rminduces similar structure on L(n,m) also:
For α ∈ R, f , g ∈ L(n,m) we can define αf and f + g by the formula,
(αf )(x) = αf (x); (f + g)(x) = f (x) + g(x).
Moreover, given f ∈ L(n,m), g ∈ L(m, `) we can define the compositefunction g ◦ f and it is not difficult to verify that this is a linear map; thusg ◦ f ∈ L(n, `).However, we should be careful, while considering such new operations.For instance, if f , g ∈ L(n, 1) then we can define fg : Rn −→ R by theformula (fg)(x) = f (x)g(x), ∀ x ∈ Rn
.But can we say that fg ∈ L(n, 1)?
ARS (IITB) MA106-Linear Algebra January 19, 2011 28 / 59
The Structure of Linear MapsThe structure of linear maps is indeed, very simple.
First of all consider the elements
zi = (0, . . . , 0, 1, 0, . . . , 0),
wherein we have put 1 in the i th-place.These elements, for i = 1, 2, . . . , n are called the standard basis elements for Rn
.It is easily seen that every element x := (x1, . . . , xn) ∈ Rn
can be written in aunique way, as a linear combination of z1, . . . zn, viz.,
x =n∑
i=1
xizi . (2)
Now given a linear map f : Rn −→ Rm, the linearity of f implies that
f (x) =∑
i
xi f (zi ). (3)
This means that to know the effect of f on any arbitrary element we have only toknow the n values f (z1), . . . , f (zn) ∈ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 29 / 59
The Structure of Linear MapsThe structure of linear maps is indeed, very simple.First of all consider the elements
zi = (0, . . . , 0, 1, 0, . . . , 0),
wherein we have put 1 in the i th-place.
These elements, for i = 1, 2, . . . , n are called the standard basis elements for Rn.
It is easily seen that every element x := (x1, . . . , xn) ∈ Rncan be written in a
unique way, as a linear combination of z1, . . . zn, viz.,
x =n∑
i=1
xizi . (2)
Now given a linear map f : Rn −→ Rm, the linearity of f implies that
f (x) =∑
i
xi f (zi ). (3)
This means that to know the effect of f on any arbitrary element we have only toknow the n values f (z1), . . . , f (zn) ∈ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 29 / 59

The Structure of Linear MapsThe structure of linear maps is indeed, very simple.First of all consider the elements
zi = (0, . . . , 0, 1, 0, . . . , 0),
wherein we have put 1 in the i th-place.These elements, for i = 1, 2, . . . , n are called the standard basis elements for Rn
.
It is easily seen that every element x := (x1, . . . , xn) ∈ Rncan be written in a
unique way, as a linear combination of z1, . . . zn, viz.,
x =n∑
i=1
xizi . (2)
Now given a linear map f : Rn −→ Rm, the linearity of f implies that
f (x) =∑
i
xi f (zi ). (3)
This means that to know the effect of f on any arbitrary element we have only toknow the n values f (z1), . . . , f (zn) ∈ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 29 / 59

The Structure of Linear MapsThe structure of linear maps is indeed, very simple.First of all consider the elements
zi = (0, . . . , 0, 1, 0, . . . , 0),
wherein we have put 1 in the i th-place.These elements, for i = 1, 2, . . . , n are called the standard basis elements for Rn
.It is easily seen that every element x := (x1, . . . , xn) ∈ Rn
can be written in aunique way, as a linear combination of z1, . . . zn, viz.,
x =n∑
i=1
xizi . (2)
Now given a linear map f : Rn −→ Rm, the linearity of f implies that
f (x) =∑
i
xi f (zi ). (3)
This means that to know the effect of f on any arbitrary element we have only toknow the n values f (z1), . . . , f (zn) ∈ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 29 / 59

The Structure of Linear MapsThe structure of linear maps is indeed, very simple.First of all consider the elements
zi = (0, . . . , 0, 1, 0, . . . , 0),
wherein we have put 1 in the i th-place.These elements, for i = 1, 2, . . . , n are called the standard basis elements for Rn
.It is easily seen that every element x := (x1, . . . , xn) ∈ Rn
can be written in aunique way, as a linear combination of z1, . . . zn, viz.,
x =n∑
i=1
xizi . (2)
Now given a linear map f : Rn −→ Rm, the linearity of f implies that
f (x) =∑
i
xi f (zi ). (3)
This means that to know the effect of f on any arbitrary element we have only toknow the n values f (z1), . . . , f (zn) ∈ Rm
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 29 / 59

The Structure of Linear MapsThe structure of linear maps is indeed, very simple.First of all consider the elements
zi = (0, . . . , 0, 1, 0, . . . , 0),
wherein we have put 1 in the i th-place.These elements, for i = 1, 2, . . . , n are called the standard basis elements for Rn
.It is easily seen that every element x := (x1, . . . , xn) ∈ Rn
can be written in aunique way, as a linear combination of z1, . . . zn, viz.,
x =n∑
i=1
xizi . (2)
Now given a linear map f : Rn −→ Rm, the linearity of f implies that
f (x) =∑
i
xi f (zi ). (3)
This means that to know the effect of f on any arbitrary element we have only toknow the n values f (z1), . . . , f (zn) ∈ Rm
.ARS (IITB) MA106-Linear Algebra January 19, 2011 29 / 59

The Structure of Linear Maps
Conversely, suppose we are given any n vectors v1, . . . , vm ∈ Rm, in a particular
order.
Then we can define a (unique) linear map f which has its values on zi equal to vi
(taken in that order) by the formula (4).
f (x) =∑
i
xi f (zi ) :=∑
i
xivi . (4)
ARS (IITB) MA106-Linear Algebra January 19, 2011 30 / 59

The Structure of Linear Maps
Conversely, suppose we are given any n vectors v1, . . . , vm ∈ Rm, in a particular
order.Then we can define a (unique) linear map f which has its values on zi equal to vi
(taken in that order) by the formula (4).
f (x) =∑
i
xi f (zi ) :=∑
i
xivi . (4)
ARS (IITB) MA106-Linear Algebra January 19, 2011 30 / 59

The Structure of Linear Maps
Example
When m = 1 = n, a linear map f : R −→ R is determined by its value on z1 = 1.
In fact, we havef (r) = rf (1).
Conversely, multiplication by each fixed real number is a linear map. Therefore theonly linear maps R −→ R are those obtained by multiplication by a fixed scalar.
ARS (IITB) MA106-Linear Algebra January 19, 2011 31 / 59

The Structure of Linear Maps
Example
When m = 1 = n, a linear map f : R −→ R is determined by its value on z1 = 1.In fact, we have
f (r) = rf (1).
Conversely, multiplication by each fixed real number is a linear map. Therefore theonly linear maps R −→ R are those obtained by multiplication by a fixed scalar.
ARS (IITB) MA106-Linear Algebra January 19, 2011 31 / 59

The Structure of Linear Maps
Example
When m = 1 = n, a linear map f : R −→ R is determined by its value on z1 = 1.In fact, we have
f (r) = rf (1).
Conversely, multiplication by each fixed real number is a linear map. Therefore theonly linear maps R −→ R are those obtained by multiplication by a fixed scalar.
ARS (IITB) MA106-Linear Algebra January 19, 2011 31 / 59

The Structure of Linear Maps
Example
Consider the case n ≥ 2, and m = 1.
Put u = (f (z1), . . . , f (zn)). Then we see that f (x) = u · x = x · u.On the other hand, we know that taking dot product with a fixed vector is a linearmap.Thus a linear map Rn −→ R is nothing but taking dot product with a fixedvector in Rn
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 32 / 59

The Structure of Linear Maps
Example
Consider the case n ≥ 2, and m = 1.Put u = (f (z1), . . . , f (zn)). Then we see that f (x) = u · x = x · u.
On the other hand, we know that taking dot product with a fixed vector is a linearmap.Thus a linear map Rn −→ R is nothing but taking dot product with a fixedvector in Rn
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 32 / 59

The Structure of Linear Maps
Example
Consider the case n ≥ 2, and m = 1.Put u = (f (z1), . . . , f (zn)). Then we see that f (x) = u · x = x · u.On the other hand, we know that taking dot product with a fixed vector is a linearmap.
Thus a linear map Rn −→ R is nothing but taking dot product with a fixedvector in Rn
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 32 / 59

The Structure of Linear Maps
Example
Consider the case n ≥ 2, and m = 1.Put u = (f (z1), . . . , f (zn)). Then we see that f (x) = u · x = x · u.On the other hand, we know that taking dot product with a fixed vector is a linearmap.Thus a linear map Rn −→ R is nothing but taking dot product with a fixedvector in Rn
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 32 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.
Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm.
On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.
Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.
Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59
The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm).
Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

The Structure of Linear Maps
Example
Consider the problem of solving a system of m linear equations in n variables:
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
· · · · · · · · ·am1x1 + am2x2 + · · · + amnxn = bm
(5)
A solution (x1, . . . , xn) can be thought of as an element of the euclidean space Rn.
Then the set of all solutions which satisfy the j th equation above is nothing butsome hyper plane Pj in Rn
.Solving the system means nothing but finding the intersection of all these planesviz., P1 ∩ · · · ∩ Pm. On the other hand, we also can think of the lhs of each ofthese equation as a map Ti : Rn −→ R.Then each Ti is easily seen to be a linearmap.Together, these m linear functions define one linear function T : Rn −→ Rm
such that T = (T1, . . . ,Tm). Solving the system of equations is now the same asdetermining points x ∈ Rn
such that T (x) = b(= (b1, . . . , bm)).
ARS (IITB) MA106-Linear Algebra January 19, 2011 33 / 59

Matrix Representation
These ideas can be put in a very concrete way in terms of matrices.
We have been writing elements of Rnin the form (x1, . . . , xn).
This is certainly a good practice if all the scripts are written along horizontal lines.However, what would happen if we use Chinese or Japanese?We would be writing them in columns! Certainly this does not cause any changein the mathematical aspects of the objects that are under study.We shall borrow this idea from the Chinese and for the sake of notationalconformity later on, we shall now itself agree to write any element of Rn
as acolumn of real numbers:
x1
x2
.
.
.xn
ARS (IITB) MA106-Linear Algebra January 19, 2011 34 / 59

Matrix Representation
These ideas can be put in a very concrete way in terms of matrices.We have been writing elements of Rn
in the form (x1, . . . , xn).
This is certainly a good practice if all the scripts are written along horizontal lines.However, what would happen if we use Chinese or Japanese?We would be writing them in columns! Certainly this does not cause any changein the mathematical aspects of the objects that are under study.We shall borrow this idea from the Chinese and for the sake of notationalconformity later on, we shall now itself agree to write any element of Rn
as acolumn of real numbers:
x1
x2
.
.
.xn
ARS (IITB) MA106-Linear Algebra January 19, 2011 34 / 59

Matrix Representation
These ideas can be put in a very concrete way in terms of matrices.We have been writing elements of Rn
in the form (x1, . . . , xn).This is certainly a good practice if all the scripts are written along horizontal lines.
However, what would happen if we use Chinese or Japanese?We would be writing them in columns! Certainly this does not cause any changein the mathematical aspects of the objects that are under study.We shall borrow this idea from the Chinese and for the sake of notationalconformity later on, we shall now itself agree to write any element of Rn
as acolumn of real numbers:
x1
x2
.
.
.xn
ARS (IITB) MA106-Linear Algebra January 19, 2011 34 / 59

Matrix Representation
These ideas can be put in a very concrete way in terms of matrices.We have been writing elements of Rn
in the form (x1, . . . , xn).This is certainly a good practice if all the scripts are written along horizontal lines.However, what would happen if we use Chinese or Japanese?
We would be writing them in columns! Certainly this does not cause any changein the mathematical aspects of the objects that are under study.We shall borrow this idea from the Chinese and for the sake of notationalconformity later on, we shall now itself agree to write any element of Rn
as acolumn of real numbers:
x1
x2
.
.
.xn
ARS (IITB) MA106-Linear Algebra January 19, 2011 34 / 59

Matrix Representation
These ideas can be put in a very concrete way in terms of matrices.We have been writing elements of Rn
in the form (x1, . . . , xn).This is certainly a good practice if all the scripts are written along horizontal lines.However, what would happen if we use Chinese or Japanese?We would be writing them in columns! Certainly this does not cause any changein the mathematical aspects of the objects that are under study.
We shall borrow this idea from the Chinese and for the sake of notationalconformity later on, we shall now itself agree to write any element of Rn
as acolumn of real numbers:
x1
x2
.
.
.xn
ARS (IITB) MA106-Linear Algebra January 19, 2011 34 / 59

Matrix Representation
These ideas can be put in a very concrete way in terms of matrices.We have been writing elements of Rn
in the form (x1, . . . , xn).This is certainly a good practice if all the scripts are written along horizontal lines.However, what would happen if we use Chinese or Japanese?We would be writing them in columns! Certainly this does not cause any changein the mathematical aspects of the objects that are under study.We shall borrow this idea from the Chinese and for the sake of notationalconformity later on, we shall now itself agree to write any element of Rn
as acolumn of real numbers:
x1
x2
.
.
.xn
ARS (IITB) MA106-Linear Algebra January 19, 2011 34 / 59

Matrix RepresentationAs we shall see soon, this convention will bring better conformity in notationrather than confusion.
However, we also see that this practice will also cost us a lot of space.So, as space saving device, let us also have another convention viz., (x1, . . . , xn)T
(read ‘x1, dotdotdot xn transpose’) to represent the above column. (We shall alsouse the notation (x1, . . . , xn)t .)The net effect is that from now onwards we will write an element of Rn
in theform (x1, . . . , xn)T and call it a column vector, in addition to our earlierconvention of referring to it as a row vector as and when it suits us. Wait amoment to see why all this fuss.In particular, we shall now onward use the notation
ei := zti := zT
i :=
0...1...0
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 35 / 59

Matrix RepresentationAs we shall see soon, this convention will bring better conformity in notationrather than confusion.However, we also see that this practice will also cost us a lot of space.
So, as space saving device, let us also have another convention viz., (x1, . . . , xn)T
(read ‘x1, dotdotdot xn transpose’) to represent the above column. (We shall alsouse the notation (x1, . . . , xn)t .)The net effect is that from now onwards we will write an element of Rn
in theform (x1, . . . , xn)T and call it a column vector, in addition to our earlierconvention of referring to it as a row vector as and when it suits us. Wait amoment to see why all this fuss.In particular, we shall now onward use the notation
ei := zti := zT
i :=
0...1...0
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 35 / 59

Matrix RepresentationAs we shall see soon, this convention will bring better conformity in notationrather than confusion.However, we also see that this practice will also cost us a lot of space.So, as space saving device, let us also have another convention viz., (x1, . . . , xn)T
(read ‘x1, dotdotdot xn transpose’) to represent the above column.
(We shall alsouse the notation (x1, . . . , xn)t .)The net effect is that from now onwards we will write an element of Rn
in theform (x1, . . . , xn)T and call it a column vector, in addition to our earlierconvention of referring to it as a row vector as and when it suits us. Wait amoment to see why all this fuss.In particular, we shall now onward use the notation
ei := zti := zT
i :=
0...1...0
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 35 / 59

Matrix RepresentationAs we shall see soon, this convention will bring better conformity in notationrather than confusion.However, we also see that this practice will also cost us a lot of space.So, as space saving device, let us also have another convention viz., (x1, . . . , xn)T
(read ‘x1, dotdotdot xn transpose’) to represent the above column. (We shall alsouse the notation (x1, . . . , xn)t .)
The net effect is that from now onwards we will write an element of Rnin the
form (x1, . . . , xn)T and call it a column vector, in addition to our earlierconvention of referring to it as a row vector as and when it suits us. Wait amoment to see why all this fuss.In particular, we shall now onward use the notation
ei := zti := zT
i :=
0...1...0
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 35 / 59

Matrix RepresentationAs we shall see soon, this convention will bring better conformity in notationrather than confusion.However, we also see that this practice will also cost us a lot of space.So, as space saving device, let us also have another convention viz., (x1, . . . , xn)T
(read ‘x1, dotdotdot xn transpose’) to represent the above column. (We shall alsouse the notation (x1, . . . , xn)t .)The net effect is that from now onwards we will write an element of Rn
in theform (x1, . . . , xn)T and call it a column vector, in addition to our earlierconvention of referring to it as a row vector as and when it suits us. Wait amoment to see why all this fuss.
In particular, we shall now onward use the notation
ei := zti := zT
i :=
0...1...0
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 35 / 59

Matrix RepresentationAs we shall see soon, this convention will bring better conformity in notationrather than confusion.However, we also see that this practice will also cost us a lot of space.So, as space saving device, let us also have another convention viz., (x1, . . . , xn)T
(read ‘x1, dotdotdot xn transpose’) to represent the above column. (We shall alsouse the notation (x1, . . . , xn)t .)The net effect is that from now onwards we will write an element of Rn
in theform (x1, . . . , xn)T and call it a column vector, in addition to our earlierconvention of referring to it as a row vector as and when it suits us. Wait amoment to see why all this fuss.In particular, we shall now onward use the notation
ei := zti := zT
i :=
0...1...0
.
ARS (IITB) MA106-Linear Algebra January 19, 2011 35 / 59

Matrix Representation
Given a linear map f : Rn −→ Rmwe have n column vectors (each of size m)
viz., f (e1), . . . , f (en).
We place them side by side to obtain an array of real numbers arranged in m rowsand n columns. For instance, if f (ej) = (f1j , f2j , . . . fmj)
T , then the array we obtainlooks like:
Mf :=
f11 f12 . . . f1n
f21 f22 . . . f2n
......
......
fm1 fm2 . . . fmn
This array is called a matrix with m rows and n columns and with real entriesfij ∈ R in the (i , j)th place.
ARS (IITB) MA106-Linear Algebra January 19, 2011 36 / 59

Matrix Representation
Given a linear map f : Rn −→ Rmwe have n column vectors (each of size m)
viz., f (e1), . . . , f (en).We place them side by side to obtain an array of real numbers arranged in m rowsand n columns.
For instance, if f (ej) = (f1j , f2j , . . . fmj)T , then the array we obtain
looks like:
Mf :=
f11 f12 . . . f1n
f21 f22 . . . f2n
......
......
fm1 fm2 . . . fmn
This array is called a matrix with m rows and n columns and with real entriesfij ∈ R in the (i , j)th place.
ARS (IITB) MA106-Linear Algebra January 19, 2011 36 / 59

Matrix Representation
Given a linear map f : Rn −→ Rmwe have n column vectors (each of size m)
viz., f (e1), . . . , f (en).We place them side by side to obtain an array of real numbers arranged in m rowsand n columns. For instance, if f (ej) = (f1j , f2j , . . . fmj)
T , then the array we obtainlooks like:
Mf :=
f11 f12 . . . f1n
f21 f22 . . . f2n
......
......
fm1 fm2 . . . fmn
This array is called a matrix with m rows and n columns and with real entriesfij ∈ R in the (i , j)th place.
ARS (IITB) MA106-Linear Algebra January 19, 2011 36 / 59

Matrix Representation
Given a linear map f : Rn −→ Rmwe have n column vectors (each of size m)
viz., f (e1), . . . , f (en).We place them side by side to obtain an array of real numbers arranged in m rowsand n columns. For instance, if f (ej) = (f1j , f2j , . . . fmj)
T , then the array we obtainlooks like:
Mf :=
f11 f12 . . . f1n
f21 f22 . . . f2n
......
......
fm1 fm2 . . . fmn
This array is called a matrix with m rows and n columns and with real entriesfij ∈ R in the (i , j)th place.
ARS (IITB) MA106-Linear Algebra January 19, 2011 36 / 59

Matrix Representation
We say the matrix Mf is of size m × n or simply that it is a m × n matrix. Wealso use the simplified notation ((fij)) for this matrix.
Clearly, two matrices like this will be treated as equal if and only if their sizes arethe same and the entries in the corresponding places are equal.In particular, if we have m = 1 we get row matrices which are the same as rowvectors. Similarly, if n = 1 we get column matrices which are the same as columnvectors.
ARS (IITB) MA106-Linear Algebra January 19, 2011 37 / 59

Matrix Representation
We say the matrix Mf is of size m × n or simply that it is a m × n matrix. Wealso use the simplified notation ((fij)) for this matrix.Clearly, two matrices like this will be treated as equal if and only if their sizes arethe same and the entries in the corresponding places are equal.
In particular, if we have m = 1 we get row matrices which are the same as rowvectors. Similarly, if n = 1 we get column matrices which are the same as columnvectors.
ARS (IITB) MA106-Linear Algebra January 19, 2011 37 / 59

Matrix Representation
We say the matrix Mf is of size m × n or simply that it is a m × n matrix. Wealso use the simplified notation ((fij)) for this matrix.Clearly, two matrices like this will be treated as equal if and only if their sizes arethe same and the entries in the corresponding places are equal.In particular, if we have m = 1 we get row matrices which are the same as rowvectors. Similarly, if n = 1 we get column matrices which are the same as columnvectors.
ARS (IITB) MA106-Linear Algebra January 19, 2011 37 / 59

Matrix Representation
From what we have seen earlier, it follows that the correspondence
f 7→ Mf
is one-one from L(n,m) onto Mm,n, the space of all m × n matrices with realentries.
This is called the matrix representation of linear maps.The correspondence M : L(n,m) −→ Mm,n itself has the linearity property, viz.,
M(f +g) =Mf +Mg ; Mαf = αMf .
Later on we shall see various properties and usefulness of this representation.
ARS (IITB) MA106-Linear Algebra January 19, 2011 38 / 59
Matrix Representation
From what we have seen earlier, it follows that the correspondence
f 7→ Mf
is one-one from L(n,m) onto Mm,n, the space of all m × n matrices with realentries. This is called the matrix representation of linear maps.
The correspondence M : L(n,m) −→ Mm,n itself has the linearity property, viz.,
M(f +g) =Mf +Mg ; Mαf = αMf .
Later on we shall see various properties and usefulness of this representation.
ARS (IITB) MA106-Linear Algebra January 19, 2011 38 / 59
Matrix Representation
From what we have seen earlier, it follows that the correspondence
f 7→ Mf
is one-one from L(n,m) onto Mm,n, the space of all m × n matrices with realentries. This is called the matrix representation of linear maps.The correspondence M : L(n,m) −→ Mm,n itself has the linearity property, viz.,
M(f +g) =Mf +Mg ; Mαf = αMf .
Later on we shall see various properties and usefulness of this representation.
ARS (IITB) MA106-Linear Algebra January 19, 2011 38 / 59

Matrix Representation
Example
Let us write down the matrix representation for some simple maps.
I (i) Since the identity map takes ei to ei it follows that MId = In whereI = ((δij)) is an n × n matrix with δij = 1 if i = j and = 0 otherwise.
In =
1
1...
1
= diag(1, 1, . . . , 1).
(We shall denote it by In, the suffix n to indicate the size of the matrix if thisis not clear from the context.)
ARS (IITB) MA106-Linear Algebra January 19, 2011 39 / 59

Matrix Representation
Example
Let us write down the matrix representation for some simple maps.
I (i) Since the identity map takes ei to ei it follows that MId = In whereI = ((δij)) is an n × n matrix with δij = 1 if i = j and = 0 otherwise.
In =
1
1...
1
= diag(1, 1, . . . , 1).
(We shall denote it by In, the suffix n to indicate the size of the matrix if thisis not clear from the context.)
ARS (IITB) MA106-Linear Algebra January 19, 2011 39 / 59

Matrix Representation
Example
I (ii) Clearly then M−Id = −I .
I (iii) The linear map T : R2 −→ R2which interchanges the two coordinates
is represented by [0 11 0
](6)
I (iv) Consider the scalar multiplication by α ∈ R on Rn. The matrix of this
linear map is the diagonal matrix diag(α, · · · , α).
ARS (IITB) MA106-Linear Algebra January 19, 2011 40 / 59

Matrix Representation
Example
I (ii) Clearly then M−Id = −I .
I (iii) The linear map T : R2 −→ R2which interchanges the two coordinates
is represented by [0 11 0
](6)
I (iv) Consider the scalar multiplication by α ∈ R on Rn. The matrix of this
linear map is the diagonal matrix diag(α, · · · , α).
ARS (IITB) MA106-Linear Algebra January 19, 2011 40 / 59

Matrix Representation
Example
I (ii) Clearly then M−Id = −I .
I (iii) The linear map T : R2 −→ R2which interchanges the two coordinates
is represented by [0 11 0
](6)
I (iv) Consider the scalar multiplication by α ∈ R on Rn. The matrix of this
linear map is the diagonal matrix diag(α, · · · , α).
ARS (IITB) MA106-Linear Algebra January 19, 2011 40 / 59

Rotation through an angle
Example
The rotation through an angle θ about the origin in the plane is represented by[cos θ − sin θsin θ cos θ
]. (7)
First of all why it is a linear map?In order to see this, we must understand how the sum of two vectors in the planeis defined geometrically, viz., by the parallelogram.
ARS (IITB) MA106-Linear Algebra January 19, 2011 41 / 59

Rotation through an angle
Example
The rotation through an angle θ about the origin in the plane is represented by[cos θ − sin θsin θ cos θ
]. (7)
First of all why it is a linear map?
In order to see this, we must understand how the sum of two vectors in the planeis defined geometrically, viz., by the parallelogram.
ARS (IITB) MA106-Linear Algebra January 19, 2011 41 / 59

Rotation through an angle
Example
The rotation through an angle θ about the origin in the plane is represented by[cos θ − sin θsin θ cos θ
]. (7)
First of all why it is a linear map?In order to see this, we must understand how the sum of two vectors in the planeis defined geometrically, viz., by the parallelogram.
ARS (IITB) MA106-Linear Algebra January 19, 2011 41 / 59
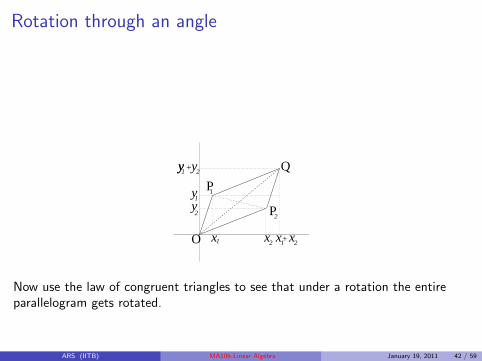
Rotation through an angle
1
Q
P
O
P
x +xx
2y+y1y
yy1
2
1 2 1 x2
2
Now use the law of congruent triangles to see that under a rotation the entireparallelogram gets rotated.
ARS (IITB) MA106-Linear Algebra January 19, 2011 42 / 59

Rotation through an angle
1
Q
P
O
P
x +xx
2y+y1y
yy1
2
1 2 1 x2
2
Now use the law of congruent triangles to see that under a rotation the entireparallelogram gets rotated.
ARS (IITB) MA106-Linear Algebra January 19, 2011 42 / 59

Rotation through an angleThe proof for the law for scaling is similar and indeed simpler.
1
1 +z
z
2z
z2
z2
1z
+ z21
z
a
a
a( )
ARS (IITB) MA106-Linear Algebra January 19, 2011 43 / 59

Reflection in a line through origin
Example
Let us right down the matrix representation for the reflection through a line Lψpassing through the origin in the plane and making an angle ψ with the positivereal axis, 0 ≤ ψ < π. Let us denote this by Rψ.
Clearly e1 is mapped to a unit vector which makes an angle 2ψ with the positivereal axis whereas e2 is mapped to one which makes an angle 2ψ − π/2.Hence thematrix of reflection Rψ is [
cos 2ψ sin 2ψsin 2ψ − cos 2ψ
]. (8)
Thus you can see that reflection through the line Lψ is the composite of reflectionin the x−axis followed by the rotation through the angle 2ψ.If we denote the rotation through an angle θ by ρθ then we have
Rψ = ρ2ψ ◦ R0 (9)
ARS (IITB) MA106-Linear Algebra January 19, 2011 44 / 59
Reflection in a line through origin
Example
Let us right down the matrix representation for the reflection through a line Lψpassing through the origin in the plane and making an angle ψ with the positivereal axis, 0 ≤ ψ < π. Let us denote this by Rψ.Clearly e1 is mapped to a unit vector which makes an angle 2ψ with the positivereal axis whereas e2 is mapped to one which makes an angle 2ψ − π/2.
Hence thematrix of reflection Rψ is [
cos 2ψ sin 2ψsin 2ψ − cos 2ψ
]. (8)
Thus you can see that reflection through the line Lψ is the composite of reflectionin the x−axis followed by the rotation through the angle 2ψ.If we denote the rotation through an angle θ by ρθ then we have
Rψ = ρ2ψ ◦ R0 (9)
ARS (IITB) MA106-Linear Algebra January 19, 2011 44 / 59

Reflection in a line through origin
Example
Let us right down the matrix representation for the reflection through a line Lψpassing through the origin in the plane and making an angle ψ with the positivereal axis, 0 ≤ ψ < π. Let us denote this by Rψ.Clearly e1 is mapped to a unit vector which makes an angle 2ψ with the positivereal axis whereas e2 is mapped to one which makes an angle 2ψ − π/2.Hence thematrix of reflection Rψ is [
cos 2ψ sin 2ψsin 2ψ − cos 2ψ
]. (8)
Thus you can see that reflection through the line Lψ is the composite of reflectionin the x−axis followed by the rotation through the angle 2ψ.If we denote the rotation through an angle θ by ρθ then we have
Rψ = ρ2ψ ◦ R0 (9)
ARS (IITB) MA106-Linear Algebra January 19, 2011 44 / 59

Reflection in a line through origin
Example
Let us right down the matrix representation for the reflection through a line Lψpassing through the origin in the plane and making an angle ψ with the positivereal axis, 0 ≤ ψ < π. Let us denote this by Rψ.Clearly e1 is mapped to a unit vector which makes an angle 2ψ with the positivereal axis whereas e2 is mapped to one which makes an angle 2ψ − π/2.Hence thematrix of reflection Rψ is [
cos 2ψ sin 2ψsin 2ψ − cos 2ψ
]. (8)
Thus you can see that reflection through the line Lψ is the composite of reflectionin the x−axis followed by the rotation through the angle 2ψ.
If we denote the rotation through an angle θ by ρθ then we have
Rψ = ρ2ψ ◦ R0 (9)
ARS (IITB) MA106-Linear Algebra January 19, 2011 44 / 59

Reflection in a line through origin
Example
Let us right down the matrix representation for the reflection through a line Lψpassing through the origin in the plane and making an angle ψ with the positivereal axis, 0 ≤ ψ < π. Let us denote this by Rψ.Clearly e1 is mapped to a unit vector which makes an angle 2ψ with the positivereal axis whereas e2 is mapped to one which makes an angle 2ψ − π/2.Hence thematrix of reflection Rψ is [
cos 2ψ sin 2ψsin 2ψ − cos 2ψ
]. (8)
Thus you can see that reflection through the line Lψ is the composite of reflectionin the x−axis followed by the rotation through the angle 2ψ.If we denote the rotation through an angle θ by ρθ then we have
Rψ = ρ2ψ ◦ R0 (9)
ARS (IITB) MA106-Linear Algebra January 19, 2011 44 / 59

Operations on Matrices
The set of all matrices of a fixed size say m × n, and with entries in the field R isdenoted by Mm,n(R) or by simply Mm,n when the field of entries is understood.
Certain algebraic operations of the field R induce similar operations on this spacealso, in an entry-wise fashion. Given two matrices A = ((aij)),B = ((bij)) ∈ Mm,n,we define A + B ∈ Mm,n to be the matrix whose (i , j)th entry is aij + bij , i.e.,
((aij)) + ((bij)) = ((aij + bij)).
Given a scalar α ∈ R, we can define the matrix αA ∈ Mm,n to be the matrixwhose (i , j)th entry is αaij .It is easily checked that the matrix O with all its entries zero is the zero elementfor the sum operation, the matrix ((−aij)) is the negative of A etc.Also verify that scalar multiplication distributes over the addition.
ARS (IITB) MA106-Linear Algebra January 19, 2011 45 / 59

Operations on Matrices
The set of all matrices of a fixed size say m × n, and with entries in the field R isdenoted by Mm,n(R) or by simply Mm,n when the field of entries is understood.Certain algebraic operations of the field R induce similar operations on this spacealso, in an entry-wise fashion. Given two matrices A = ((aij)),B = ((bij)) ∈ Mm,n,we define A + B ∈ Mm,n to be the matrix whose (i , j)th entry is aij + bij , i.e.,
((aij)) + ((bij)) = ((aij + bij)).
Given a scalar α ∈ R, we can define the matrix αA ∈ Mm,n to be the matrixwhose (i , j)th entry is αaij .It is easily checked that the matrix O with all its entries zero is the zero elementfor the sum operation, the matrix ((−aij)) is the negative of A etc.Also verify that scalar multiplication distributes over the addition.
ARS (IITB) MA106-Linear Algebra January 19, 2011 45 / 59

Operations on Matrices
The set of all matrices of a fixed size say m × n, and with entries in the field R isdenoted by Mm,n(R) or by simply Mm,n when the field of entries is understood.Certain algebraic operations of the field R induce similar operations on this spacealso, in an entry-wise fashion. Given two matrices A = ((aij)),B = ((bij)) ∈ Mm,n,we define A + B ∈ Mm,n to be the matrix whose (i , j)th entry is aij + bij , i.e.,
((aij)) + ((bij)) = ((aij + bij)).
Given a scalar α ∈ R, we can define the matrix αA ∈ Mm,n to be the matrixwhose (i , j)th entry is αaij .
It is easily checked that the matrix O with all its entries zero is the zero elementfor the sum operation, the matrix ((−aij)) is the negative of A etc.Also verify that scalar multiplication distributes over the addition.
ARS (IITB) MA106-Linear Algebra January 19, 2011 45 / 59

Operations on Matrices
The set of all matrices of a fixed size say m × n, and with entries in the field R isdenoted by Mm,n(R) or by simply Mm,n when the field of entries is understood.Certain algebraic operations of the field R induce similar operations on this spacealso, in an entry-wise fashion. Given two matrices A = ((aij)),B = ((bij)) ∈ Mm,n,we define A + B ∈ Mm,n to be the matrix whose (i , j)th entry is aij + bij , i.e.,
((aij)) + ((bij)) = ((aij + bij)).
Given a scalar α ∈ R, we can define the matrix αA ∈ Mm,n to be the matrixwhose (i , j)th entry is αaij .It is easily checked that the matrix O with all its entries zero is the zero elementfor the sum operation, the matrix ((−aij)) is the negative of A etc.
Also verify that scalar multiplication distributes over the addition.
ARS (IITB) MA106-Linear Algebra January 19, 2011 45 / 59

Operations on Matrices
The set of all matrices of a fixed size say m × n, and with entries in the field R isdenoted by Mm,n(R) or by simply Mm,n when the field of entries is understood.Certain algebraic operations of the field R induce similar operations on this spacealso, in an entry-wise fashion. Given two matrices A = ((aij)),B = ((bij)) ∈ Mm,n,we define A + B ∈ Mm,n to be the matrix whose (i , j)th entry is aij + bij , i.e.,
((aij)) + ((bij)) = ((aij + bij)).
Given a scalar α ∈ R, we can define the matrix αA ∈ Mm,n to be the matrixwhose (i , j)th entry is αaij .It is easily checked that the matrix O with all its entries zero is the zero elementfor the sum operation, the matrix ((−aij)) is the negative of A etc.Also verify that scalar multiplication distributes over the addition.
ARS (IITB) MA106-Linear Algebra January 19, 2011 45 / 59

Operations on Matrices
Earlier we have identified Rnwith the set of all column vectors and hence with
M1,n(R). We now observe that this identification preserves the algebraic structureas well. The same is true of the identification of Rm
with Mm,1(R).The ‘transpose’ operation that we introduced earlier just for the convenience ofprinting acquires a wider meaning now. It identifies the space M1,n with Mn,1.
We observe that this operation can be easily extended for all matrices as follows:AT is the n ×m matrix whose (i , j)th entry is aji . This way we get the transposeoperation: T : Mm,n −→ Mn,m, by the formula A 7→ AT .(The functional notation would have been T (A), but we would like to stick toclassical notation. Other notations in practice are At and tA etc..) It is easilyverified that
(αA + βB)T = αAT + βBT
where α, β are scalars.This property of the transpose can be referred to as the linearity of the transpose.
ARS (IITB) MA106-Linear Algebra January 19, 2011 46 / 59

Operations on Matrices
Earlier we have identified Rnwith the set of all column vectors and hence with
M1,n(R). We now observe that this identification preserves the algebraic structureas well. The same is true of the identification of Rm
with Mm,1(R).The ‘transpose’ operation that we introduced earlier just for the convenience ofprinting acquires a wider meaning now. It identifies the space M1,n with Mn,1.We observe that this operation can be easily extended for all matrices as follows:AT is the n ×m matrix whose (i , j)th entry is aji . This way we get the transposeoperation: T : Mm,n −→ Mn,m, by the formula A 7→ AT .
(The functional notation would have been T (A), but we would like to stick toclassical notation. Other notations in practice are At and tA etc..) It is easilyverified that
(αA + βB)T = αAT + βBT
where α, β are scalars.This property of the transpose can be referred to as the linearity of the transpose.
ARS (IITB) MA106-Linear Algebra January 19, 2011 46 / 59

Operations on Matrices
Earlier we have identified Rnwith the set of all column vectors and hence with
M1,n(R). We now observe that this identification preserves the algebraic structureas well. The same is true of the identification of Rm
with Mm,1(R).The ‘transpose’ operation that we introduced earlier just for the convenience ofprinting acquires a wider meaning now. It identifies the space M1,n with Mn,1.We observe that this operation can be easily extended for all matrices as follows:AT is the n ×m matrix whose (i , j)th entry is aji . This way we get the transposeoperation: T : Mm,n −→ Mn,m, by the formula A 7→ AT .(The functional notation would have been T (A), but we would like to stick toclassical notation. Other notations in practice are At and tA etc..) It is easilyverified that
(αA + βB)T = αAT + βBT
where α, β are scalars.This property of the transpose can be referred to as the linearity of the transpose.
ARS (IITB) MA106-Linear Algebra January 19, 2011 46 / 59

Operations on MatricesWhen we have functions f : Rn −→ Rm
, g : Rm −→ Rlwe can talk about the
composite g ◦ f .
We have also seen that if f and g are linear then so is g ◦ f .A natural question to ask is: what is the relation between the matrixrepresentations Mf =: A,Mg =: B and Mg◦f ?To determine this, we have to compute the value of (g ◦ f )(ei ).
(g ◦ f )(ej) = g(∑
i aijei )
=∑
i
aijg(ei )
=∑
i
aij
(∑k
bkiek
)
=∑
k
(∑i
bkiaij
)ek .
Thus if Mg◦f = C = ((ckj)) then we have
ckj =m∑
i=1
bkiaij (10)
ARS (IITB) MA106-Linear Algebra January 19, 2011 47 / 59

Operations on MatricesWhen we have functions f : Rn −→ Rm
, g : Rm −→ Rlwe can talk about the
composite g ◦ f . We have also seen that if f and g are linear then so is g ◦ f .
A natural question to ask is: what is the relation between the matrixrepresentations Mf =: A,Mg =: B and Mg◦f ?To determine this, we have to compute the value of (g ◦ f )(ei ).
(g ◦ f )(ej) = g(∑
i aijei )
=∑
i
aijg(ei )
=∑
i
aij
(∑k
bkiek
)
=∑
k
(∑i
bkiaij
)ek .
Thus if Mg◦f = C = ((ckj)) then we have
ckj =m∑
i=1
bkiaij (10)
ARS (IITB) MA106-Linear Algebra January 19, 2011 47 / 59

Operations on MatricesWhen we have functions f : Rn −→ Rm
, g : Rm −→ Rlwe can talk about the
composite g ◦ f . We have also seen that if f and g are linear then so is g ◦ f .A natural question to ask is: what is the relation between the matrixrepresentations Mf =: A,Mg =: B and Mg◦f ?
To determine this, we have to compute the value of (g ◦ f )(ei ).
(g ◦ f )(ej) = g(∑
i aijei )
=∑
i
aijg(ei )
=∑
i
aij
(∑k
bkiek
)
=∑
k
(∑i
bkiaij
)ek .
Thus if Mg◦f = C = ((ckj)) then we have
ckj =m∑
i=1
bkiaij (10)
ARS (IITB) MA106-Linear Algebra January 19, 2011 47 / 59

Operations on MatricesWhen we have functions f : Rn −→ Rm
, g : Rm −→ Rlwe can talk about the
composite g ◦ f . We have also seen that if f and g are linear then so is g ◦ f .A natural question to ask is: what is the relation between the matrixrepresentations Mf =: A,Mg =: B and Mg◦f ?To determine this, we have to compute the value of (g ◦ f )(ei ).
(g ◦ f )(ej) = g(∑
i aijei )
=∑
i
aijg(ei )
=∑
i
aij
(∑k
bkiek
)
=∑
k
(∑i
bkiaij
)ek .
Thus if Mg◦f = C = ((ckj)) then we have
ckj =m∑
i=1
bkiaij (10)
ARS (IITB) MA106-Linear Algebra January 19, 2011 47 / 59

Operations on MatricesWhen we have functions f : Rn −→ Rm
, g : Rm −→ Rlwe can talk about the
composite g ◦ f . We have also seen that if f and g are linear then so is g ◦ f .A natural question to ask is: what is the relation between the matrixrepresentations Mf =: A,Mg =: B and Mg◦f ?To determine this, we have to compute the value of (g ◦ f )(ei ).
(g ◦ f )(ej) = g(∑
i aijei )
=∑
i
aijg(ei )
=∑
i
aij
(∑k
bkiek
)
=∑
k
(∑i
bkiaij
)ek .
Thus if Mg◦f = C = ((ckj)) then we have
ckj =m∑
i=1
bkiaij (10)
ARS (IITB) MA106-Linear Algebra January 19, 2011 47 / 59

Operations on Matrices
Therefore we shall define the composite of B and A to be the `× n matrix C :
C = BA
where C = ((ckj)) with ckj given by (10).It is of prime importance to note that number of columns in B is the same as thenumber of rows in A in order that BA is defined. We shall implicitly assume thiswhile writing BA. It also follows that the number of rows and columns of BC arerespectively equal to that of B and A.
ARS (IITB) MA106-Linear Algebra January 19, 2011 48 / 59

Operations on Matrices
Basic Properties
I 1. Associativity: If A,B,C are matrices such that AB and BC are definedthen (AB)C and A(BC ) are also defined and are equal, A(BC ) = (AB)C .
I 2. Right and Left Distributivity: If A(B + C ) = AB + AC provided at leastone side is (and hence both sides are) defined. Similarly, we have(B + C )A = BA + CA, etc..Let In denote the n × n matrix whose (ij)th entry is equal to δij . (Recallδij = 1 if i = j and 0 otherwise. These are called Kronecker symbols.) Thematrix In is called the identity matrix.
I 3. Mutliplicative Identity For any A ∈ Mm,n,B ∈ Mn,k we have AIn = A andInB = B.
I 4.(AB)T = BT AT .
I 5. Let f : Rn −→ Rm, g : Rm −→ Rl
be linear maps. Then we have,Mg◦f =MgMf .
ARS (IITB) MA106-Linear Algebra January 19, 2011 49 / 59

Operations on Matrices
Basic Properties
I 1. Associativity: If A,B,C are matrices such that AB and BC are definedthen (AB)C and A(BC ) are also defined and are equal, A(BC ) = (AB)C .
I 2. Right and Left Distributivity: If A(B + C ) = AB + AC provided at leastone side is (and hence both sides are) defined. Similarly, we have(B + C )A = BA + CA, etc..
Let In denote the n × n matrix whose (ij)th entry is equal to δij . (Recallδij = 1 if i = j and 0 otherwise. These are called Kronecker symbols.) Thematrix In is called the identity matrix.
I 3. Mutliplicative Identity For any A ∈ Mm,n,B ∈ Mn,k we have AIn = A andInB = B.
I 4.(AB)T = BT AT .
I 5. Let f : Rn −→ Rm, g : Rm −→ Rl
be linear maps. Then we have,Mg◦f =MgMf .
ARS (IITB) MA106-Linear Algebra January 19, 2011 49 / 59

Operations on Matrices
Basic Properties
I 1. Associativity: If A,B,C are matrices such that AB and BC are definedthen (AB)C and A(BC ) are also defined and are equal, A(BC ) = (AB)C .
I 2. Right and Left Distributivity: If A(B + C ) = AB + AC provided at leastone side is (and hence both sides are) defined. Similarly, we have(B + C )A = BA + CA, etc..Let In denote the n × n matrix whose (ij)th entry is equal to δij . (Recallδij = 1 if i = j and 0 otherwise. These are called Kronecker symbols.) Thematrix In is called the identity matrix.
I 3. Mutliplicative Identity For any A ∈ Mm,n,B ∈ Mn,k we have AIn = A andInB = B.
I 4.(AB)T = BT AT .
I 5. Let f : Rn −→ Rm, g : Rm −→ Rl
be linear maps. Then we have,Mg◦f =MgMf .
ARS (IITB) MA106-Linear Algebra January 19, 2011 49 / 59

Operations on Matrices
Basic Properties
I 1. Associativity: If A,B,C are matrices such that AB and BC are definedthen (AB)C and A(BC ) are also defined and are equal, A(BC ) = (AB)C .
I 2. Right and Left Distributivity: If A(B + C ) = AB + AC provided at leastone side is (and hence both sides are) defined. Similarly, we have(B + C )A = BA + CA, etc..Let In denote the n × n matrix whose (ij)th entry is equal to δij . (Recallδij = 1 if i = j and 0 otherwise. These are called Kronecker symbols.) Thematrix In is called the identity matrix.
I 3. Mutliplicative Identity For any A ∈ Mm,n,B ∈ Mn,k we have AIn = A andInB = B.
I 4.(AB)T = BT AT .
I 5. Let f : Rn −→ Rm, g : Rm −→ Rl
be linear maps. Then we have,Mg◦f =MgMf .
ARS (IITB) MA106-Linear Algebra January 19, 2011 49 / 59

Operations on Matrices
Basic Properties
I 1. Associativity: If A,B,C are matrices such that AB and BC are definedthen (AB)C and A(BC ) are also defined and are equal, A(BC ) = (AB)C .
I 2. Right and Left Distributivity: If A(B + C ) = AB + AC provided at leastone side is (and hence both sides are) defined. Similarly, we have(B + C )A = BA + CA, etc..Let In denote the n × n matrix whose (ij)th entry is equal to δij . (Recallδij = 1 if i = j and 0 otherwise. These are called Kronecker symbols.) Thematrix In is called the identity matrix.
I 3. Mutliplicative Identity For any A ∈ Mm,n,B ∈ Mn,k we have AIn = A andInB = B.
I 4.(AB)T = BT AT .
I 5. Let f : Rn −→ Rm, g : Rm −→ Rl
be linear maps. Then we have,Mg◦f =MgMf .
ARS (IITB) MA106-Linear Algebra January 19, 2011 49 / 59

Operations on Matrices
Basic Properties
I 1. Associativity: If A,B,C are matrices such that AB and BC are definedthen (AB)C and A(BC ) are also defined and are equal, A(BC ) = (AB)C .
I 2. Right and Left Distributivity: If A(B + C ) = AB + AC provided at leastone side is (and hence both sides are) defined. Similarly, we have(B + C )A = BA + CA, etc..Let In denote the n × n matrix whose (ij)th entry is equal to δij . (Recallδij = 1 if i = j and 0 otherwise. These are called Kronecker symbols.) Thematrix In is called the identity matrix.
I 3. Mutliplicative Identity For any A ∈ Mm,n,B ∈ Mn,k we have AIn = A andInB = B.
I 4.(AB)T = BT AT .
I 5. Let f : Rn −→ Rm, g : Rm −→ Rl
be linear maps. Then we have,Mg◦f =MgMf .
ARS (IITB) MA106-Linear Algebra January 19, 2011 49 / 59

Operations on Matrices
Remark
Consider the space M2,2. By writing the entries of successive rows one afteranother in a single row, we see that this is in one-to-one correspondence with thetotality of ordered 4-tuples of real numbers. Moreover this correspondencepreserves the two algebraic operations of taking sum and scalar product. Thus we
can actually think of the space of 2× 2 matrices with real entries as R4. Exactly
in a similar fashion, Mm,n can be thought of as Rm×n. Calculus on this space will
involve ‘mn variables’. Soon, we shall see the true meaning of the phrase ‘numberof variables’, the easiest way to understand the meaning of ‘dimension.’
ARS (IITB) MA106-Linear Algebra January 19, 2011 50 / 59

Invertible transformations Matrices
DefinitionAny function f : X −→ Y is said to be invertible, if there exists g : Y −→ X suchthat g ◦ f = IdX and f ◦ g = IdY .
Here for any set Z , IdZ denotes the identity map of the set Z . The inverse ofa function if it exists is unique and is denoted by f −1.
DefinitionLet A,B be any two matrices We say B is a left-inverse of A and A is aright-inverse of B if we have BA = I . We say A is invertible if there is a leftinverse as well as a right inverse for A.
ARS (IITB) MA106-Linear Algebra January 19, 2011 51 / 59

Invertible transformations Matrices
DefinitionAny function f : X −→ Y is said to be invertible, if there exists g : Y −→ X suchthat g ◦ f = IdX and f ◦ g = IdY .
Here for any set Z , IdZ denotes the identity map of the set Z . The inverse ofa function if it exists is unique and is denoted by f −1.
DefinitionLet A,B be any two matrices We say B is a left-inverse of A and A is aright-inverse of B if we have BA = I . We say A is invertible if there is a leftinverse as well as a right inverse for A.
ARS (IITB) MA106-Linear Algebra January 19, 2011 51 / 59

Invertible transformations Matrices
DefinitionAny function f : X −→ Y is said to be invertible, if there exists g : Y −→ X suchthat g ◦ f = IdX and f ◦ g = IdY .
Here for any set Z , IdZ denotes the identity map of the set Z . The inverse ofa function if it exists is unique and is denoted by f −1.
DefinitionLet A,B be any two matrices We say B is a left-inverse of A and A is aright-inverse of B if we have BA = I . We say A is invertible if there is a leftinverse as well as a right inverse for A.
ARS (IITB) MA106-Linear Algebra January 19, 2011 51 / 59

Invertible transformations Matrices
LemmaIf C ,B are respectively a left-inverse and a right-inverse of A then C = B. In thiscase, if C ′ and B ′ are any left-inverse and right-inverse of A, then we haveC ′ = C ,B ′ = B,
Proof: Let C ∈ Mp,q,A ∈ Mq,r ,B ∈ Mr ,s be such that CA = I , and AB = I .(This already implies p = r and q = s.) By associative law (CA)B is definedand C (AB) is also defined and we have C (AB) = (CA)B. Therefore
B = IB = (CA)B = C (AB) = CI = C .
Applying the same to B ′ in place of B we get B ′ = C . Similarly, B = C ′
Therefore, C = C ′ and B = B ′. ♠
ARS (IITB) MA106-Linear Algebra January 19, 2011 52 / 59

Invertible transformations Matrices
DefinitionIn view of the above lemma, whenever a matrix has both left-inverse and aright-inverse, these two are equal and we call it merely the inverse of A anddenote it by A−1.
RemarkI Check that (A−1)−1 = A.
I Check that if A1,A2 are invertible then so is A1A2. What is its inverse?
I Clearly In, is invertible with I−1n = In, and
I diag (a1, a2, . . . , an) is invertible iff each ai 6= 0. Moreover, its inverse isdiag (a−1
1 , . . . , a−1n ).
ARS (IITB) MA106-Linear Algebra January 19, 2011 53 / 59

Invertible transformations Matrices
DefinitionIn view of the above lemma, whenever a matrix has both left-inverse and aright-inverse, these two are equal and we call it merely the inverse of A anddenote it by A−1.
RemarkI Check that (A−1)−1 = A.
I Check that if A1,A2 are invertible then so is A1A2. What is its inverse?
I Clearly In, is invertible with I−1n = In, and
I diag (a1, a2, . . . , an) is invertible iff each ai 6= 0. Moreover, its inverse isdiag (a−1
1 , . . . , a−1n ).
ARS (IITB) MA106-Linear Algebra January 19, 2011 53 / 59

Invertible transformations Matrices
DefinitionIn view of the above lemma, whenever a matrix has both left-inverse and aright-inverse, these two are equal and we call it merely the inverse of A anddenote it by A−1.
RemarkI Check that (A−1)−1 = A.
I Check that if A1,A2 are invertible then so is A1A2. What is its inverse?
I Clearly In, is invertible with I−1n = In, and
I diag (a1, a2, . . . , an) is invertible iff each ai 6= 0. Moreover, its inverse isdiag (a−1
1 , . . . , a−1n ).
ARS (IITB) MA106-Linear Algebra January 19, 2011 53 / 59

Invertible transformations Matrices
Remark
I If fA, fB : Rn −→ Rnare the linear transformations defined by A,B = A−1
then it follows that fA ◦ fB = fAB = Id .
I Likewise fB ◦ fA = Id . Even the converse holds. viz., if a linear transformationf is invertible, then its associated matrix Mf is invertible with its inversecorresponding to the transformation f −1.
I It is easily checked that an invertible map is one-one and onto.
I If f : Rn −→ Rnis an invertible linear map, check that f −1 is linear.
I In general, we do not yet know how to determine whether a given matrix isinvertible.
I The study of invertible matrices is very important to us and we are going tospend some time on this soon.
I We shall first take up this below, for the case of matrices which are slightvariations of the identity matrix, called elementary matrices.
ARS (IITB) MA106-Linear Algebra January 19, 2011 54 / 59

Invertible transformations Matrices
Remark
I If fA, fB : Rn −→ Rnare the linear transformations defined by A,B = A−1
then it follows that fA ◦ fB = fAB = Id .
I Likewise fB ◦ fA = Id . Even the converse holds. viz., if a linear transformationf is invertible, then its associated matrix Mf is invertible with its inversecorresponding to the transformation f −1.
I It is easily checked that an invertible map is one-one and onto.
I If f : Rn −→ Rnis an invertible linear map, check that f −1 is linear.
I In general, we do not yet know how to determine whether a given matrix isinvertible.
I The study of invertible matrices is very important to us and we are going tospend some time on this soon.
I We shall first take up this below, for the case of matrices which are slightvariations of the identity matrix, called elementary matrices.
ARS (IITB) MA106-Linear Algebra January 19, 2011 54 / 59

Invertible transformations Matrices
Remark
I If fA, fB : Rn −→ Rnare the linear transformations defined by A,B = A−1
then it follows that fA ◦ fB = fAB = Id .
I Likewise fB ◦ fA = Id . Even the converse holds. viz., if a linear transformationf is invertible, then its associated matrix Mf is invertible with its inversecorresponding to the transformation f −1.
I It is easily checked that an invertible map is one-one and onto.
I If f : Rn −→ Rnis an invertible linear map, check that f −1 is linear.
I In general, we do not yet know how to determine whether a given matrix isinvertible.
I The study of invertible matrices is very important to us and we are going tospend some time on this soon.
I We shall first take up this below, for the case of matrices which are slightvariations of the identity matrix, called elementary matrices.
ARS (IITB) MA106-Linear Algebra January 19, 2011 54 / 59

Invertible transformations Matrices
Remark
I If fA, fB : Rn −→ Rnare the linear transformations defined by A,B = A−1
then it follows that fA ◦ fB = fAB = Id .
I Likewise fB ◦ fA = Id . Even the converse holds. viz., if a linear transformationf is invertible, then its associated matrix Mf is invertible with its inversecorresponding to the transformation f −1.
I It is easily checked that an invertible map is one-one and onto.
I If f : Rn −→ Rnis an invertible linear map, check that f −1 is linear.
I In general, we do not yet know how to determine whether a given matrix isinvertible.
I The study of invertible matrices is very important to us and we are going tospend some time on this soon.
I We shall first take up this below, for the case of matrices which are slightvariations of the identity matrix, called elementary matrices.
ARS (IITB) MA106-Linear Algebra January 19, 2011 54 / 59

Invertible transformations Matrices
Remark
I If fA, fB : Rn −→ Rnare the linear transformations defined by A,B = A−1
then it follows that fA ◦ fB = fAB = Id .
I Likewise fB ◦ fA = Id . Even the converse holds. viz., if a linear transformationf is invertible, then its associated matrix Mf is invertible with its inversecorresponding to the transformation f −1.
I It is easily checked that an invertible map is one-one and onto.
I If f : Rn −→ Rnis an invertible linear map, check that f −1 is linear.
I In general, we do not yet know how to determine whether a given matrix isinvertible.
I The study of invertible matrices is very important to us and we are going tospend some time on this soon.
I We shall first take up this below, for the case of matrices which are slightvariations of the identity matrix, called elementary matrices.
ARS (IITB) MA106-Linear Algebra January 19, 2011 54 / 59

Invertible transformations Matrices
Remark
I If fA, fB : Rn −→ Rnare the linear transformations defined by A,B = A−1
then it follows that fA ◦ fB = fAB = Id .
I Likewise fB ◦ fA = Id . Even the converse holds. viz., if a linear transformationf is invertible, then its associated matrix Mf is invertible with its inversecorresponding to the transformation f −1.
I It is easily checked that an invertible map is one-one and onto.
I If f : Rn −→ Rnis an invertible linear map, check that f −1 is linear.
I In general, we do not yet know how to determine whether a given matrix isinvertible.
I The study of invertible matrices is very important to us and we are going tospend some time on this soon.
I We shall first take up this below, for the case of matrices which are slightvariations of the identity matrix, called elementary matrices.
ARS (IITB) MA106-Linear Algebra January 19, 2011 54 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.
We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.
If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.
In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?
Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59
Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0.
Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.
[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matricesConsider a square matrix Eij whose (i , j)th entry is 1 and all other entries are 0.We deliberately do not mention the size of this matrix, because we would like touse the same notation in all possible sizes, the actual size being understood by thecontext.If we multiply a matrix A by Eij on the left, then what we get is a matrix whosei th row is equal to the j th row of A and all other rows are zero.In particular EijEij = 0, (i 6= j). It follows that for any number α and i 6= j
(I + αEij)(I − αEij) = I + αEij − αEij − α2EijEij = I . (11)
What happens if we take i = j in the above discussion?Clearly (11) is no longervalid. On the other hand consider
(I + αEii )(I + βEii ) = I + (α + β + αβ)Eii (12)
This equation tells us that if we want the RHS to be equal to I then we musthave α+ β + αβ = 0. Given any α we can solve for β iff 1 + α 6= 0. Thus we haveproved that I + αEii is invertible if α 6= −1.[Of course, this can be verified directly also: the matrix I +αEii is nothing but thediagonal matrix with all the diagonal entries equal to 1 except the ii th one whichis equal to 1 + α. Therefore, it is invertible iff 1 + α 6= 0. ]
ARS (IITB) MA106-Linear Algebra January 19, 2011 55 / 59

Elementary matrices
We can play this game a little further.
Consider now I + Eij + Eji − Eii − Ejj . Usingsimilar method to the above check that this is also invertible.Now if we actually write down this matrix, this is nothing but the identity matrixafter interchanging the i th and j th rows.These are called transposition matrices.The linear maps corresponding to them merely interchange the i th and j th
coordinates (ei and ej) and does not disturb anything else.We shall denote them simply by Tij .
ARS (IITB) MA106-Linear Algebra January 19, 2011 56 / 59

Elementary matrices
We can play this game a little further.Consider now I + Eij + Eji − Eii − Ejj . Usingsimilar method to the above check that this is also invertible.
Now if we actually write down this matrix, this is nothing but the identity matrixafter interchanging the i th and j th rows.These are called transposition matrices.The linear maps corresponding to them merely interchange the i th and j th
coordinates (ei and ej) and does not disturb anything else.We shall denote them simply by Tij .
ARS (IITB) MA106-Linear Algebra January 19, 2011 56 / 59

Elementary matrices
We can play this game a little further.Consider now I + Eij + Eji − Eii − Ejj . Usingsimilar method to the above check that this is also invertible.Now if we actually write down this matrix, this is nothing but the identity matrixafter interchanging the i th and j th rows.
These are called transposition matrices.The linear maps corresponding to them merely interchange the i th and j th
coordinates (ei and ej) and does not disturb anything else.We shall denote them simply by Tij .
ARS (IITB) MA106-Linear Algebra January 19, 2011 56 / 59
Elementary matrices
We can play this game a little further.Consider now I + Eij + Eji − Eii − Ejj . Usingsimilar method to the above check that this is also invertible.Now if we actually write down this matrix, this is nothing but the identity matrixafter interchanging the i th and j th rows.These are called transposition matrices.The linear maps corresponding to them merely interchange the i th and j th
coordinates (ei and ej) and does not disturb anything else.
We shall denote them simply by Tij .
ARS (IITB) MA106-Linear Algebra January 19, 2011 56 / 59

Elementary matrices
We can play this game a little further.Consider now I + Eij + Eji − Eii − Ejj . Usingsimilar method to the above check that this is also invertible.Now if we actually write down this matrix, this is nothing but the identity matrixafter interchanging the i th and j th rows.These are called transposition matrices.The linear maps corresponding to them merely interchange the i th and j th
coordinates (ei and ej) and does not disturb anything else.We shall denote them simply by Tij .
ARS (IITB) MA106-Linear Algebra January 19, 2011 56 / 59

Elementary matrices
To sum up we have:
Theorem
The elementary matrices I + αEij (i 6= j), I + αEii , (α 6= −1) andTij = I + Eij + Eji − Eii − Ejj are all invertible with their respective inversesI − αEij , I − (α/1 + α)Eii and Tij .
The importance of elementary matrices stems out from the fact that the operationof multiplying a given matrix A on the left by one of them has simpleinterpretation in terms of a certain operation on the rows of A.
ARS (IITB) MA106-Linear Algebra January 19, 2011 57 / 59

Elementary matrices
To sum up we have:
Theorem
The elementary matrices I + αEij (i 6= j), I + αEii , (α 6= −1) andTij = I + Eij + Eji − Eii − Ejj are all invertible with their respective inversesI − αEij , I − (α/1 + α)Eii and Tij .
The importance of elementary matrices stems out from the fact that the operationof multiplying a given matrix A on the left by one of them has simpleinterpretation in terms of a certain operation on the rows of A.
ARS (IITB) MA106-Linear Algebra January 19, 2011 57 / 59

Permutation Matrices
DefinitionA permutation matrix is a square matrix which has all the entries in any given row(and column) equal to zero except one of them and this non zero entry is equal to1.
[0 11 0
] 0 1 01 0 00 0 1
1 0 00 0 10 1 0
etc. are easy examples.
ARS (IITB) MA106-Linear Algebra January 19, 2011 58 / 59

Permutation Matrices
DefinitionA permutation matrix is a square matrix which has all the entries in any given row(and column) equal to zero except one of them and this non zero entry is equal to1.
[0 11 0
] 0 1 01 0 00 0 1
1 0 00 0 10 1 0
etc. are easy examples.
ARS (IITB) MA106-Linear Algebra January 19, 2011 58 / 59
Permutation Matrices
In general given such a matrix, for each 1 ≤ i ≤ n consider the i th row. Look atthe place where the entry 1 occurs. Call it σ(i).
This way we get a map σ : N −→ N which is clearly a one-to-one mapping.Conversely, given a permutation σ : N −→ N, we define a matrix Pσ = ((pij)) bythe formula
pij =
{0 if j 6= σ(i)1 if j = σ(i)
Can you now see that a permutation matrix is obtained by merely shuffling therows of the identity matrix, or, by shuffling the columns?Check that they have another interesting property viz., PP t = P tP = In. Inparticular, they are invertible.[Proof: If Ri denotes the i th row of P and Cj denotes the j th column of P t , bydefinition of P t , it follows that Cj = R t
j . Since clearly, RiRtj = δij (the Kronecker
symbols), it follows that RiCj = δij which is the (i , j)th entry of In.]
ARS (IITB) MA106-Linear Algebra January 19, 2011 59 / 59

Permutation Matrices
In general given such a matrix, for each 1 ≤ i ≤ n consider the i th row. Look atthe place where the entry 1 occurs. Call it σ(i).This way we get a map σ : N −→ N which is clearly a one-to-one mapping.
Conversely, given a permutation σ : N −→ N, we define a matrix Pσ = ((pij)) bythe formula
pij =
{0 if j 6= σ(i)1 if j = σ(i)
Can you now see that a permutation matrix is obtained by merely shuffling therows of the identity matrix, or, by shuffling the columns?Check that they have another interesting property viz., PP t = P tP = In. Inparticular, they are invertible.[Proof: If Ri denotes the i th row of P and Cj denotes the j th column of P t , bydefinition of P t , it follows that Cj = R t
j . Since clearly, RiRtj = δij (the Kronecker
symbols), it follows that RiCj = δij which is the (i , j)th entry of In.]
ARS (IITB) MA106-Linear Algebra January 19, 2011 59 / 59

Permutation Matrices
In general given such a matrix, for each 1 ≤ i ≤ n consider the i th row. Look atthe place where the entry 1 occurs. Call it σ(i).This way we get a map σ : N −→ N which is clearly a one-to-one mapping.Conversely, given a permutation σ : N −→ N, we define a matrix Pσ = ((pij)) bythe formula
pij =
{0 if j 6= σ(i)1 if j = σ(i)
Can you now see that a permutation matrix is obtained by merely shuffling therows of the identity matrix, or, by shuffling the columns?Check that they have another interesting property viz., PP t = P tP = In. Inparticular, they are invertible.[Proof: If Ri denotes the i th row of P and Cj denotes the j th column of P t , bydefinition of P t , it follows that Cj = R t
j . Since clearly, RiRtj = δij (the Kronecker
symbols), it follows that RiCj = δij which is the (i , j)th entry of In.]
ARS (IITB) MA106-Linear Algebra January 19, 2011 59 / 59

Permutation Matrices
In general given such a matrix, for each 1 ≤ i ≤ n consider the i th row. Look atthe place where the entry 1 occurs. Call it σ(i).This way we get a map σ : N −→ N which is clearly a one-to-one mapping.Conversely, given a permutation σ : N −→ N, we define a matrix Pσ = ((pij)) bythe formula
pij =
{0 if j 6= σ(i)1 if j = σ(i)
Can you now see that a permutation matrix is obtained by merely shuffling therows of the identity matrix, or, by shuffling the columns?
Check that they have another interesting property viz., PP t = P tP = In. Inparticular, they are invertible.[Proof: If Ri denotes the i th row of P and Cj denotes the j th column of P t , bydefinition of P t , it follows that Cj = R t
j . Since clearly, RiRtj = δij (the Kronecker
symbols), it follows that RiCj = δij which is the (i , j)th entry of In.]
ARS (IITB) MA106-Linear Algebra January 19, 2011 59 / 59
Permutation Matrices
In general given such a matrix, for each 1 ≤ i ≤ n consider the i th row. Look atthe place where the entry 1 occurs. Call it σ(i).This way we get a map σ : N −→ N which is clearly a one-to-one mapping.Conversely, given a permutation σ : N −→ N, we define a matrix Pσ = ((pij)) bythe formula
pij =
{0 if j 6= σ(i)1 if j = σ(i)
Can you now see that a permutation matrix is obtained by merely shuffling therows of the identity matrix, or, by shuffling the columns?Check that they have another interesting property viz., PP t = P tP = In. Inparticular, they are invertible.[Proof: If Ri denotes the i th row of P and Cj denotes the j th column of P t , bydefinition of P t , it follows that Cj = R t
j . Since clearly, RiRtj = δij (the Kronecker
symbols), it follows that RiCj = δij which is the (i , j)th entry of In.]
ARS (IITB) MA106-Linear Algebra January 19, 2011 59 / 59
























