Embed Size (px)
DESCRIPTION
Self-balancing Platform Prototype
Citation preview

SpongeBob is a small two-wheel robot. It was built as a prototype for a self-balancing platform. Since the wheels are parallel, it does not keep itself upright mechanically. Inherently this robot is unstable. To make it stable and stays in equilibrium, the wheels should always be right under the center of gravity or the center of mass. To accomplish this we need to dynamically measure the changing in the center of mass using IMU (Inertial Measurement Unit) and drive the wheels accordingly to maintain its balance.
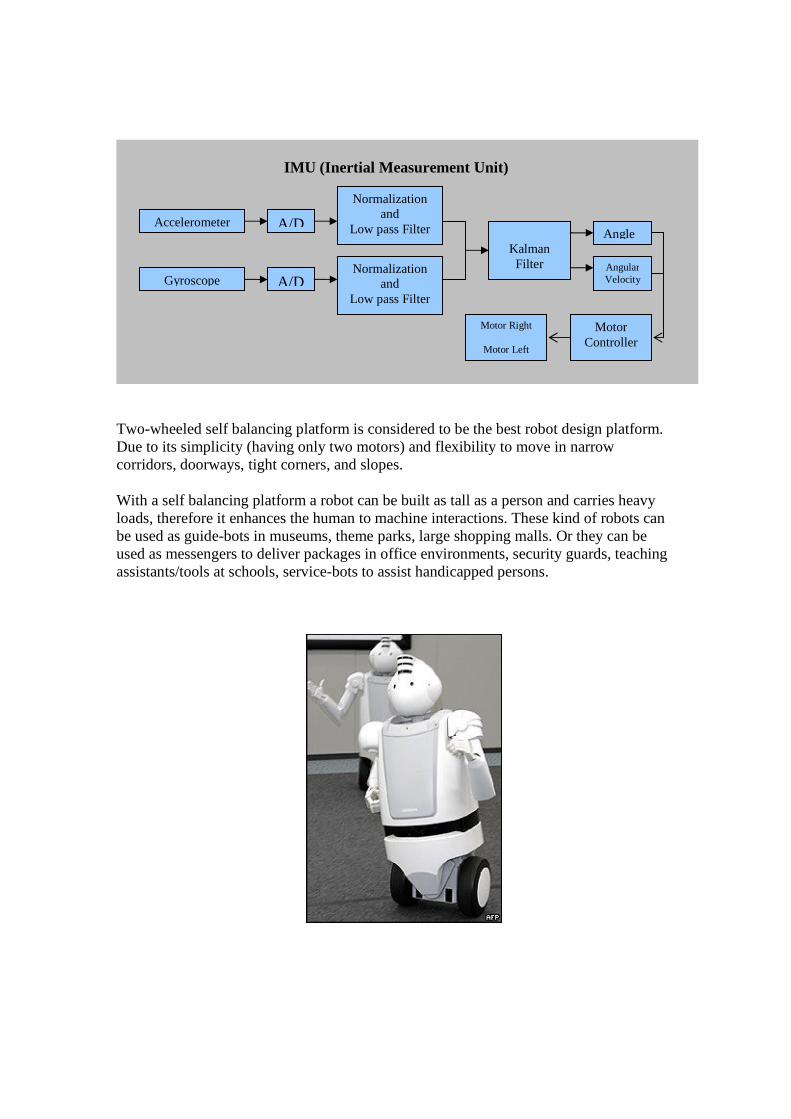
Two-wheeled self balancing platform is considered to be the best robot design platform. Due to its simplicity (having only two motors) and flexibility to move in narrow corridors, doorways, tight corners, and slopes. With a self balancing platform a robot can be built as tall as a person and carries heavy loads, therefore it enhances the human to machine interactions. These kind of robots can be used as guide-bots in museums, theme parks, large shopping malls. Or they can be used as messengers to deliver packages in office environments, security guards, teaching assistants/tools at schools, service-bots to assist handicapped persons.
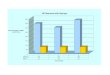
Gyroscope
Accelerometer A/D
A/D
IMU (Inertial Measurement Unit)
Normalization and
Low pass Filter
Normalization and
Low pass Filter
Kalman Filter
Angle
Angular Velocity
Motor Controller
Motor Right
Motor Left
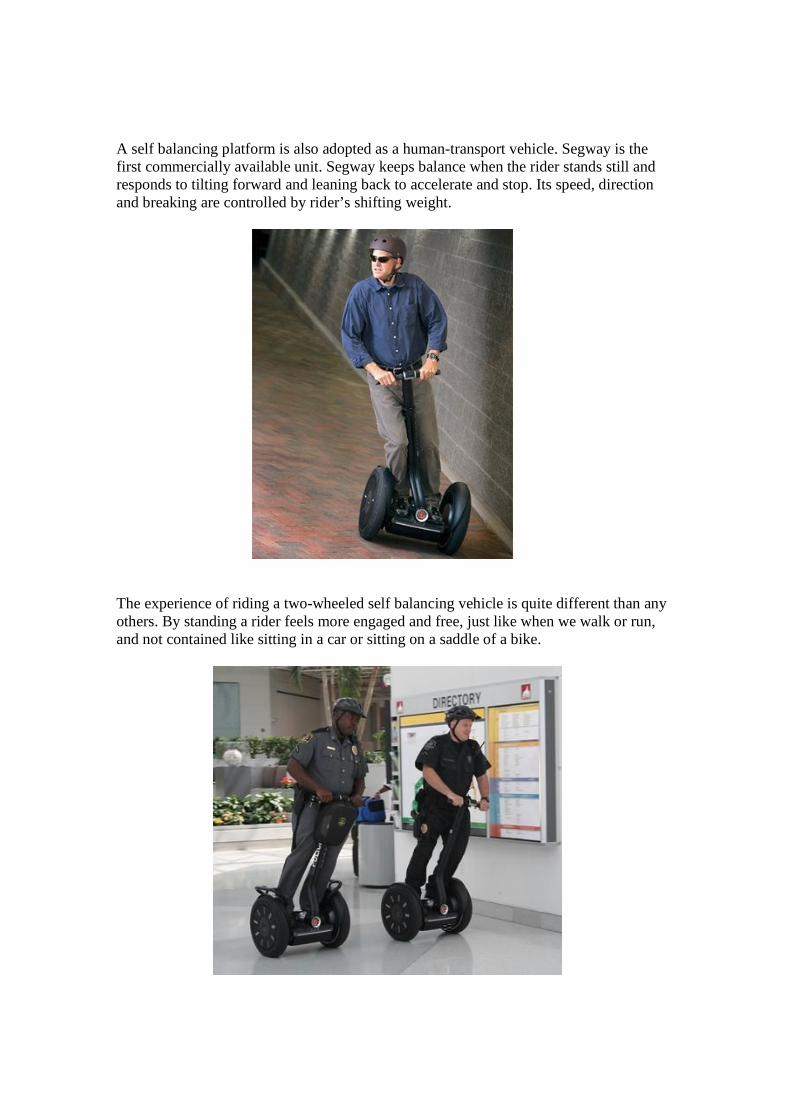
A self balancing platform is also adopted as a human-transport vehicle. Segway is the first commercially available unit. Segway keeps balance when the rider stands still and responds to tilting forward and leaning back to accelerate and stop. Its speed, direction and breaking are controlled by rider’s shifting weight.
The experience of riding a two-wheeled self balancing vehicle is quite different than any others. By standing a rider feels more engaged and free, just like when we walk or run, and not contained like sitting in a car or sitting on a saddle of a bike.

The self balancing mechanism can be further utilized to help balancing a single wheel vehicle or a unicycle. The only different is the rider needs to balance the lateral/side-way movements like riding a bicycle.
Having successfully built a prototype of self balancing robot, we can now explore all the possibilities that a self balancing platform provides. Since the under-lying principles (electronics and software) are the same across all self balancing platforms, adopting it to other type of applications (robots or vehicles) is just a matter of mechanics.