Embed Size (px)
Citation preview

Speckle noise model for optical heterodyne line-scan imagery
Barry W. Lyons and Stanley R. Robinson
An imaging system that consists of a laser scanning a surface and a heterodyne receiver that measures thebackscattered field is considered. The second moment statistics of the amplitude and amplitude-squaredof the output signal of the optical receiver are developed, assuming the rough surface is a random processwith known mean, variance, and correlation distance properties. The mean and covariance functions ofeach measurement are related to the scattered field correlation function, the reflection of the surface, andthe key system parameters. The resulting noise models describe both the average speckle cell size and thecontrast variations in the image caused by speckle noise.
1. Introduction
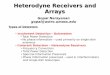
Line-scan imaging systems that operate in the irregion have been widely studied.1"2 From such passiveconfigurations, it is conceptually straightforward toinclude a laser illuminator to achieve active imaging.Figure 1 is a simple block diagram of such a system. Inthe system, a laser illuminator scans the object surfacein a pattern that will result in complete once only cov-erage of a certain area. The scanning system also re-flects the field backscattered from each illuminated spotonto an optical heterodyne detector as the beam isscanned over the surface. The backscattered field isa function of the reflectivity of the object's surface;therefore, an image of the surface can be obtained fromthe detected field. If the object's surface is opticallysmooth, specular reflection will occur, and the field willonly be reflected directly back to the detector when thebeam is normally incident on the object surface.However, most surfaces are rough with respect to opticalwavelengths so that a portion of the field is constantlybackscattered to the detector. While this rough surfaceprovides the energy needed for detection, it also distortsthe reflected wave and the resulting image because theexact form of the surface roughness is a priori unknownand constantly changing as the beam is moved to dif-ferent areas. This image distortion is commonly called
Both authors are at Wright-Patterson AFB, Ohio 45433: B. W.Lyons is with Air Force Avionics Laboratory, Reconnaissance &Weapons Delivery Division, and S. R. Robinson is with Air ForceInstitute of Technology, Department of Electrical Engineering.
Received 4 April 1978.0003-6935/79/060781-10$00.50/0.© 1979 Optical Society of America.
speckle. While there is considerable informationavailable in the literature concerning speckle as it relatesto imaging systems that make intensity measure-ments, 3 -5 there is little information available on a sys-tem model for an optical heterodyne line-scan imagingsystem. The objective of this paper is to present aspeckle noise model for such a system, based on a recentstudy.6
In the following, all optical fields are consideredmonochromatic or quasi-monochromatic and arepropagated from one point to another by using theHuygens-Fresnel integral. The rough surface is mod-eled using statistics, and the optical detector outputsignal is based on well-known detector models. Theresulting statistics of the detector output are then usedin representing two methods of forming an image signal.The statistics of the final image signal are shown to bea function of the system parameters such as the laserbeam spot size, the scanning velocity, the detector ap-erture size, and the optical local oscillator field. Theeffect of the parameters on the reflectivity signal andthe speckle noise is discussed within the context of eachmethod.
Our approach is organized into two steps. We firstpresent a model for the heterodyne line-scan system. Itincludes the effects of the illuminating beam, the scat-tering of the field due to the rough surface, and theheterodyne detection process. The result is a secondmoment description for the complex signal represen-tation of the output of the heterodyne receiver. Thesenoise statistics are then interpreted in terms of equiv-alent quadrature representations. The second stepinvolves computing the statistics of the output of bothlinear and square-law envelope detectors which areplaced at the heterodyne receiver output. Finally, weprovide physical interpretations of the results in termsof resultant image quality.
15 March 1979 / Vol. 18, No. 6 / APPLIED OPTICS 781

LASER AND BEAM REFLECTION - R T R SCANNING OPTICIBCANIG Ai M FROM RETRN AND OPTICALOPIS PROPAGATION OBET PROPAGATION DECION
IMAGE POST ELECTRONICL i DETECTION ~SIGNALFORMATION esSIn EgTnECTION
Fig. 1. The optical heterodyne line-scan imaging system.
II. Heterodyne Line-Scan Imaging
First, we present a scattering model for the roughsurface; this model is then incorporated into a compositeheterodyne line-scan imagery model. From the systemrepresentation, the mean and covariance functions ofthe complex heterodyne output signal are obtained.
A. Rough Surface Scattering Model
The reflection from a rough surface is, in general, acomplicated process that involves the surface reflectioncoefficients, the surface height variations, the macro-scopic and microscopic angles of incidence, and thepolarization of the incident field. Since the systemdiscussed here involves the imaging of many differenttypes of surfaces with characteristics beyond the sys-tem's control, and since the usable information is onlyin the direct backscattered radiation, a more simplephenomenological model is used. The model, whichwas also used in a similar direct detection imagingproblem, 5 is less complicated than Beckman's 7 but isclosely related. It is developed under the followingassumptions: (1) scalar fields are used; (2) depolar-ization effects, multiple scattering, and shadowing areneglected, as is typically the case7 8 since the effects areoften small and difficult to describe mathematically; (3)the surface is considered rough as compared to the op-tical wavelength so that backscattered radiation existsand total specular reflection does not occur; (4) the ra-dius of curvature of the surface irregularities is assumedlarge as compared to the optical wavelengths; and (5)the field reflectivity is considered a real function ofspace with a value between 0 and 1, so that it attenuatesthe incident field such that the reflectivity is the surfacecharacteristic to be measured; i.e., the signal of inter-est.
Under the above conditions, the process of reflectionis modeled by multiplying the incident field Ui (x) witha random phase term exp[+jO(x)] and a reflectivity terma (x). Since we use the same coordinate system for bothreflected and transmitted fields, the incident field mustalso be conjugated to represent the change in propa-gating direction. The resulting reflected wave be-comes
U,(x) = a(x) expU0(x)U(x).(1
The random phase can now be related to the surfaceheights. First, the surface heights r(x) are modeled asa stationary zero mean Gaussian random process. Thezero mean follows from the fact that any constant ref-erence can be added to the model such that the en-
semble average becomes zero. A Gaussian distributionis commonly used to describe a rough surface but maybreak down for some polished man-made surfaces.
It has been shown elsewhere4 6 8 that, for either planewave or spherical wave illumination nearly normal tothe surface, the resulting phase variations can be ex-pressed as
0(x) = [(4ix)/X]r(x).
Thus, it is straightforward to demonstrate
d2[(47)lA]2f2
(2)
(3)
where o and a' are the variances of 0 and r, respectively.When the wavelength is large compared with Ur, the rmsvariation of the phase is small, and there would be littleproblem with interference. But as Ur approaches X/4to X/2 or greater, the rms phase variations become largerthan 27r rad, and destructive interference will result.Since we are interested in a second moment model of animage limited by speckle (interference) effects, wehenceforth suppose that the surface is rough relative tothe optical wavelength.
B. Heterodyne Receiver Model
In the system model the output field from the illu-minating laser will be propagated to a rough surface,reflected, and propagated back to the detector by meansof the Huygens-Fresnel integral equation. The detectorcurrent will be determined from this field. Finally, weobtain the moments of the output current in terms ofthe statistics of the received backscattered field.
The mechanics of the heterodyne line-scan systemscan the laser radiation across the scene to be imaged,and the detector measures the backscattered field. Thesystem mechanics also keeps the detector surface andlocal oscillator field aligned normal to the direction thelaser is pointing. However, the angle of incidence be-tween the laser field and the object surface changes asthe beam is swept across the object. In principle, thecoordinate rotations required to describe this scanningsystem could all be included in the Huygens-Fresnelintegral, but the problem becomes more complicatedthan useful. Therefore, the system is modeled with thelaser, detector, and associated fields in a fixed coordi-nate system. The laser beam is assumed to be normallyincident upon an object surface where the reflectivityand random phase characteristics are effectively movingbeneath the beam in time with velocity v. Both thespreading of the beam spot and the changing surfacevelocity that occur as the beam is swept over the surfaceare ignored. (The model will be a function of thebeamwidth and the velocity so that the above effects canbe determined simply by varying these parameters.)
At any instant of time, the detector output is pro-portional to an average of all the reflectance values ateach point within the beam spot and the detector fieldof view. Because the laser beam is circular in shape, thereflectance points covered by the width of the beam ateach point in the scanning direction will change slightlyas the beam is moved forward. The basic change in theaverage reflectance is caused by the reflectance points
782 APPLIED OPTICS / Vol. 18, No. 6 / 15 March 1979

that enter and leave the beam in the scanning direction.Thus the model is developed in the scanning directiononly, where the reflectance at each point in this direc-tion can be thought of as an average of the reflectanceover the width of the beam. The extension of the modelto both lateral dimensions is straightforward but moretedious.
The system geometry is shown in Fig. 2. The 1-Dfield (a Gaussian spherical wave) from the laser at theobject surface can be written as
expUj(kz - r/4)] [ (a)2 k 2Ui (a) - l/ Ai exp-w() exp ljJ'(4)
where Ai is an amplitude term, and w (z) is the effectivebeamwidth at the surface. From Eq. (1), where thereflectivity and random phase are now properties of amoving surface, the backscattered field is
Ur(a) = a(a + t) expjO(a + vt)]U7(a).
The reflected field is now propagated back to thetector through the Huygens-Fresnel integral, resultin a field Ud (x) at the detector plane.
The ideal heterodyne receiver output current, cltered at the frequency fIF, can then be expressas9 '10
0o(t) = I X Re[Ud(x)U'o(x) exp(-j2rfjFt)]dx, (6)hfO 1d d
where q is the charge of an electron, w7 is the detectorquantum efficiency, hfo is the energy of a detectedphoton, Ad is the detector active width, and Ud and ULOare the signal and local oscillator fields, respectively.The detector output current becomes
io(t) Re jexp [-12 (kz -- 4] PWD(x)a(a + vt)hfoXz 4/I JJ
exp t[ (a )i expUO(a + vt)] exp (- -2) exp ( 2)
*exp 2r pi)U*O(x) exp(-j2IFt)dxda] (7)
where PD (x) is the limiting detector aperture function.A simplification of Eq. (7) can be made by realizing thatPD (X) can represent a lens aperture and transfer func-tion or just the detector aperture size. If the local os-cillator field is a plane wave, the x integral in the aboveequation yields the Fresnel diffraction pattern of PD (x).However, this can be simplified by realizing that in mostcases PD (x) is narrow enough to satisfy the Fraun-hofer-type approximation. If this is. not the case, theexp{-j[(kx2 )/(2z)]I phase term can still be negated ei-ther by a conjugate lens transfer function (converginglens) or by an identical phase term from the local os-cillatorfield. Inanycase, ULo(x), exp{-j[(kx2 )/(2z)],and any phase term in PD (x) can all be combined toequal 1, so that PD (x) is now just the limiting aperturesize. The x integral is now the spatial Fourier trans-form of PD(X) evaluated atfx = /(Xz):
VX [PD(x)]If:= APDF (a). (8)
Equation (7) now reduces to
LASERr-DETECTOR
I-vt .',v,,,,,,,,,,,a,,, ,.,,,,,,,,.,,,,
X
a
a(a+vt)
Fig. 2. System geometry.
(5) io(t) = B Re jexp [-j2 (kz - exp(-j27rfIFt) fh(a)
ie- ( ka2)d jing * expfjO(a + vt)Ia(a + t) exp - da1,
en- ' where B = (2q7nAi)/hfoXz) andsed h(a) = PDF(a) exp [- a] 2 .
I jw~ (_z)]I
(9)
(10)
h (a) will be referred to as the system function andrepresents the combined result of the beam spot sizeand the heterodyne detector field of view.
It is well known that a bandpass waveform can beexpressed in terms of a complex waveform centered atthe baseband.11 We find it more convenient to obtainfirst the moments of the complex current, denoted i (t),and then the moments of io(t) in terms of those results. 6
Thus, the moments of the complex current will now bedetermined. In determining these moments the phaseterms in front of the integral in Eq. (9) can be dropped.(It can be shown that these phase terms are indeedunrelated to the problem solution.) Thus, the usefulcomplex current is defined as
i(t) = B fh()a(a + vt) expUjO(a + vt)] exp (---) da.
(11)
Since the rough surface phase term is the only ran-dom term in Eq. (11), the mean of the current is
_____2 = ( *ka2EPi0t)= B expj J h(a)a (a + Vt) exp i- 1-)da, (12)
where exp[-(Uo)2/2] is the value of the characteristicfunction of the Gaussian random variable 0. The valueof the characteristic function for a surface with or Xin Eq. (3) is 5 X 10-35 or less; thus the mean current iseffectively equal to zero.
With a zero mean, the covariance of the currentequals the correlation of the current so that a completesecond moment description of i(t) involves the mo-ments E[i(t)i(t')] and E[i(t)i*(t')]. Using Eq. (11), thefirst is zero under the same conditions as for the zeromean current of Eq. (12). The other term is
15 March 1979 / Vol. 18, No. 6 / APPLIED OPTICS 783
i

E[i(t)i*(t')] A Ci(t,t') = B2 jff h(a)h(a')a(a + vt)a(a' + Vt')
.E(expUj[0(a + vt) - 0(a' + vt')]})
exp [ k (a2- a/2)I dada'. (13)
The average in Eq. (13) is equal to
expf- cj[1 - p(Aa + vAt)]) A PI(Aa + vAt), (14)
where P(-) is the normalized covariance function of thephase process (x) and (a + vt) - (a' + Vt') A Aa + At.We denote P ( the field correlation pulse functionwith correlation distance 1. This function has a valueof 1 for = 0 and decreases to exp(-r0) as : approachesinfinity.
1.0
.9
.8
.7
.6
.5
PI(A a) .4
.3
.2
.1
.1 .2 .3 .4 .5 .6 .7
Fig. 3. Plot of P (a).
It is necessary to determine a function to describe thenormalized covariance function p(Aa). Beckman 7
suggests a Gaussian function of the form
p(Aa) = exp A- 2a c J . I (15)
where ac is the correlation distance. For opticallyrough surfaces Goodman 8 points out that ac is generallyless than 0.1 mm. Kurtz' 2 has shown that when o ofEq. (3) is equal to 5 or greater the correlation distanceof the field at the e-1 point is then less than the corre-lation distance of the rough surface by a factor of 1/co.Since it has been assumed that r of Eq. (3) is greaterthan a wavelength, 0-0 will be greater than 5, and thecorrelation distance of the field through Eq. (14) will beless than 0.1 mm/5 = 0.02 mm. P(Aa) is plotted in Fig.3 as a function of Aa/ac for several values of r Thisplot is similar to the complex coherence factor shownby Goodman in Ref. 4. The plots clearly show that thefield correlation distance 1 is less than the surface cor-relation distance for the case of a rough surface and aGaussian surface correlation function. However, thisconclusion is not strongly dependent on the assumedshape of p(Aa). Equation (14) shows that any narrowsurface correlation function will cause the field corre-lation distance 1 to be small whenever r > X.
For typical field correlation distances and laser div-ergences of the order of 1 mrad, a Fraunhofer-typeargument can be made so that the phase termexp[+jk(a 2 - a' 2 )/z] can be approximated by 1.6Equation (13) then becomes
E[i(t ji* (t')]I I !, pa.8 .9 1.0 a
= B2 ff h(a)h(a')a(a + vt)a(a + vt')Pi(Aa + vAt)dada'. (16)
[h(n)aa+vt') * P (+vt)] Ia =0
Vut L
Fig. 4. Graphical determination ofthe complex current correlation
distance.
784 APPLIED OPTICS / Vol. 18, No. 6 / 15 March 1979
h(a)a(avt)
L
2 2
I
l

The correlation function of Eq. (16) is nonstationarybecause of the reflectance terms, so the correlation orcoherence distance is difficult to define. But, an indi-cation of the change in the correlation function as At isincreased can be seen by writing Eq. (16) as
E[i(t)i* (t')]
= B2 h(a)a(a + vt)[h(a)a(a + vt')®Pj(a + vAt)]da, (17)
where 0 denotes the convolution process. A graphicalrepresentation of Eq. (17) is shown in Fig 4. Themaximum widthL of h(a)a (a + vt) and h(a)a (a + vt')is determined by the beam spot size or the Fouriertransform of the detector aperture, whichever is less.From Eq. (17) and the figure, the product of h (a)a (a +ut) times the convolution process is zero once vAt + isgreater than L. Because the function is nonstationary,this represents a maximum correlation distance, andsince I << L, the correlation distance is defined as
VAt A L. (18)
The above result is intuitively pleasing since it wouldseem natural that the output would become uncorre-lated once all the original scattering areas passed out ofthe system field of view. From Eq. (18) the correlationtime is
At = L/v, (19)
and the noise bandwidth is approximately
A 1 - 1/(At) = v/L. (20)
The results of Eqs. (19) and (20) are similar to those forthe case of filtered white noise, where the correlationtime is approximately equal to the response time of thefilter, and the noise bandwidth is equal to the inverseof the filter response time. However, if the reflectancevaries much within the correlation distance given by Eq.(18), the correlation function will be modulated by thereflectance, and the actual correlation distance (andtime) may become considerably less than that given bythe previous equations.
The results presented so far have been based on thecommonly used assumption that the surface, and thusthe phase, is a Gaussian random process. This as-sumption has made the problem mathematically trac-table but is not particularly necessary. It has beenshown that the characteristic function of several dis-tributions is small when r is of the order of a wave-length or greater.5 Thus, the mean of the complexcurrent can still be considered equal to zero. Also, theshape of Pi (Aa) determined as a result of the Gaussianassumption is not critical as long as the correlationdistance is still small. This small field correlationdistance is a result of the reflection of a wave from arough surface. The rough surface by definition ischaracterized by a short correlation distance. Thus, theresults presented so far appear to apply to any realisticnatural rough surface.
Fig. 5. The quadrature model.
Ill. Image Signal and Speckle Noise
Since it has been shown from Eq. (12) that the meanof the complex current is zero, it follows that the meansof the real and imaginary parts of the current are alsozero. Therefore, the mean of the heterodyne detectoroutput given by Eq. (9) is zero so that an image basedon this signal only represents noise. This does notimply that the mean of the envelope (polar amplitude)of the complex current is zero, so a method of deter-mining the image from the amplitude A must be de-veloped. The value of the amplitude A can be physi-cally determined from the detector output current byeither coherent signal detection or envelope detectiontechniques, and the amplitude squared A2 can be de-termined by square-law detection methods.
A. Quadrature Model
The statistical models for detection of A and A2 canbe related to the heterodyne detector output current bylooking first at the well-known quadrature model.13-1 5 22
As can be seen from Fig. 5, one quadrature output is thereal part of the complex current, denoted Ir, and theother is the imaginary part of the complex current, de-noted Ii. The statistics of the quadrature outputs canbe determined as follows. Beckman has shown, byusing the classical random walk problem and the Cen-tral Limit theorem, that the real and imaginary partsof the scattered field are joint Gaussian random vari-ables.7 From this result it is reasonable to suppose thatthe quadrature outputs are Gaussian random processes.The results of the previous section can be used to showthat the moments of the real and imaginary parts of thecomplex current must satisfy
E[Ir(t)Ir(t')] = E[Ii(t)Ii(t')] for all t, t', (21)
E[Ir(t)IiWt) = E[I,(t')Ii(t)] forall t, t'. (22)
The terms of Eqs. (21) and (22) can be related to thecovariance of the complex current as follows:
E[i(t)i* (tl)] =EJI,(t)Ir(t1) + Ii (t)Ii () + j[Ir(t)Ii (tl)Ir(t')Ii(t)I)2E[Ir(t)I(t')] + 2jE[Ir(t)Ii(t)]. (23)
Since all the terms in Eq. (16) for the covariance of thecomplex current are real, the cross correlation of Ir andIs in Eq. (23) is zero, and Eq. (23) becomes
15 March 1979 / Vol. 18, No. 6 / APPLIED OPTICS 785

A(t)cos;(t)
oi|At)D
A( sin (t) o
Fig. 6. Determination of A and A2 from the quadrature outputs.
E[i(t)i*(t')] = 2E[Ir(t)I(t')] (24)
or
E[Ir(t)Ir(t')I = l/2E[i(t)i*(t') = 112[Ci(tt')]- [(a)/2]ko(t,t'), (25)
where kdt,t) = 1. From Eq. (21) it can be seen that Irand Ii are identically distributed random processes.The results of Eqs. (23) and (24) have shown that Ir andIi are uncorrelated random processes, and because theyare jointly Gaussian, they are also statistically inde-pendent. Thus, at this point, it has been shown that thequadrature outputs are zero mean, statistically inde-pendent identically distributed Gaussian random pro-cesses. Also, the second moments of these randomprocesses have been related to the complex current byEq. (25).
B. Preliminary Remarks for the Detection of A and A2
The above model is now equivalent to the well-knownnarrowband noise model.13-' 5 The amplitude squaredof the current can be obtained from the quadraturemodel by squaring each quadrature output and addingthe results. The square root of this output is then theamplitude (envelope). This model is shown in Fig. 6.The first-order, i.e., single sample, probability densityof the amplitude is the Rayleigh probability densitywhich is a well-known transformation from the Gauss-ian quadratures.
The kth moment of the amplitude from the Rayleighdensity is defined as
E(Ah) = (2)k/2r(+ 1) (26)
where r(.) represents the gamma function. TheseRayleigh moments have been previously suggested fora heterodyne system, but the details of the model werenot presented.16
A typical performance measure for a system is thesignal-to-noise ratio (SNR). The SNR is defined as theratio of the signal power to the noise power, or in sta-tistical terms, it is the square of the mean divided by thevariance. A check of the SNRs for the two detectionprocesses can easily be made using Eq. (26) as fol-lows:
E2[A(t)I ?(ir/4) ___
SNRA= 2 = I -2(/4) = - = 3.66, (27)a1AWt a- a (r/4) 4 - rEP2 [A2 (t)] 4T
SNRA2 = 2 - = 1. (28)CA2(t) 2ai -
The SNRs are independent of all system parametersand thus are not a useful performance measure forsystem design purposes. In fact, the SNR representsa point (time-independent) measure of performance,whereas a more useful approach is to use the covariancefunction which includes temporal evolution effects.The covariance of A is given as15
CA K(tt') = [( t)/2J] -2E[ko(tt')] [1-k2(tt,)]-K[ko(t,t')] -(7r/2)), (29)
where K and E are the elliptical integrals of the first andsecond kind, respectively. The covariance of A2 ismuch simpler and is15
CA2(t,t') = a4k(tt') = [C,(t,t')] 2 . (30)
The information to develop the individual models formeasurement of A and A 2 is now available through themeans from Eq. (26) and the covariance functions ofEqs. (29) and (30).
C. Model for Detection of A 2
The model for A2 will be discussed first because it issimpler and easier to interpret. From Eqs. (23) and (26)the mean of A 2 can be expressed in terms of the reflec-tance and system function as follows:
E[A 2 (t)] = a = B 2 ffS h(a)h(a')a(a + vt)
*a(a + vt)Pj(Aa)dad '. (31)
As previously noted, P (Aa) is narrow with respect tochanges in h (a) and a (a), so as an approximation it canbe represented in terms of the Dirac delta function
Pj(Aa) _ C(Aa), (32)
where C = .fPi(4a)dAa. The system function h(a) isalso symmetric so that Eq. (31) becomes
E[A2(t)] = CB2 ffjh(-a')h(-a)a(a + vt)a(a' + vt)
-(a-a')dada'
= CB2 f h2(Vt - x)a 2(x)dx. (33)
Thus, the mean of A2 (t) can be represented by a linearsystem model of a 2 (x) convolved with h2 (x). Again byusing Eq. (16), the covariance of A 2 from Eq. (30) canbe expressed in terms of the covariance of the complexcurrent as follows:
786 APPLIED OPTICS / Vol. 18, No. 6 / 15 March 1979
I

CA2(t,t') = [B2 ffjh((a)h(a')a(a + Vt)a(a' + vt')
Pi(Aa + vAt)dada'J
= [B2 fS h(vt - x)h(vt'- )
a(x)a(x')Pi(x -x')dxdx'] (34)
The double integral in the above equation is identicalwith that obtained in computing the output correlationof a filter with an impulse response h (x) driven by zeromean noise of correlation R (x,x') = a(x)a(x')Pi(x -x'). The square of the double integral in Eq. (34) sim-ply means that the noise can be represented by theproduct of two noise processes that are identically dis-tributed and statistically independent. In contrast tomany other noise models,2 1' 22 the above model is signal[i.e., a(x)] dependent. The second moment model forsquare-law detection is shown in Fig. 7.
The speckle noise model presented above can beeasily modified to include the quantum noise effectsthat were neglected in the detector output current givenby Eq. (6). It has been shown that the output noisestatistics for a heterodyne detector can be representedas a Gaussian random process.9 Thus, these statisticsare compatible with the model presented here, and thedetector noise terms can be included simply by addingthe appropriate terms to the speckle noise representa-tion in Eq. (34).
Several things can be noted from the model for A2.The output A2 can obviously be considered either aspatial signal in the variable x or a temporal signal in thevariable t, where the relationship between the twovariables is x = ut. The temporal Fourier transform ofA2 (t) using Eq. (33) is
9it{E[A2(t)])= B2 0 H'(f)A'(l) (35)
where H'(f) = It[h 2(t)I and A'(f) = t[a 2(t)]. FromEq. (35) it can be seen that the frequency content of theoutput spectrum will broaden as v increases. Thus, thebandwidth of the electronics that process the outputmust be scaled by v to maintain the desired frequencycontent of a2 in the final image.
The model for E[A2(x)] is also identical with the re-sult discussed by Goodman for an incoherent imagingsystem.17 Thus, square-law detection can be thoughtof as an incoherent imaging system with an additivenoise term with covariance given by Eq. (34).
The spatial filtering by h2 (x) and thus the systemfunction h (x) can be seen by taking the spatial Fouriertransform of E[A2 (x)] from Eq. (33) as follows:
51J{E[A2(x)II = B2CA'(fX)H'(f.)= B2C[A'(f.)][H(f.)GH(fx)], (36)
where H(fx) = ?A [h(x)]. It is well known that thewider the system function h(x) is in space, the narrowerH(fx) becomes. As H(fx) becomes narrower, so does theconvolution of H(fx) with itself, and thus more of thehigh-frequency content of a2(x) is filtered out. Asimilar conclusion about system resolution as relatedto h(x) can be made from the classical Rayleigh two-point criteria.2 1,2 2
The effect of h (x) on the mean does not tell thecomplete story since h (x) also affects the covariance ofA2, i.e., the fluctuations of A2 (x). The covariance of A2
from Eq. (34) is nonstationary, but an indication of thecorrelation distance can be determined from the cor-relation distance of the complex current given by Eqs.(17) and (18). The result of squaring the complexcurrent correlation function is to reduce the maximumcorrelation distance of Eq. (18) slightly. Still, it can beseen that the wider the system function, the longer themaximum correlation distance.
The square root of the covariance at t = t' from Eq.(34), i.e., the square root of the variance, represents therms variation from the mean due to the noise. Thisvariation can be thought of as the contrast variationsin the output image that are due to the rough surface(speckle) noise. Also, the correlation distance repre-sents the average interval over which this noise processis related or does not change very much. Thus, thecorrelation distance can be thought of as the averagespeckle cell size in the resulting image, and it is directlyrelated to the width of the system function h (x), as wasshown by Eq. (18).
The effect of the system function on the noise can alsobe seen by looking at the noise power spectral density.[The Fourier transform of the output covariance withrespect to vAt is called the power spectral density,S(fx).'8] The covariance of A2 given by Eq. (34) isnonstationary, so strictly speaking it is not subject toFourier analysis. But if the reflectance is considerednearly constant (or slowly varying), the power spectraldensity of A2 is
15 March 1979 / Vol. 18, No. 6 / APPLIED OPTICS 787

a(x) A2 (x)
(x)
E [n1(x)] =E[n 2(x)]=0
n 2 (x)
Fig. 7. The model for detection ofthe current amplitude squared.
Fig. 8. The approximate model fordetection of the current amplitude.
788 APPLIED OPTICS / Vol. 18, No. 6 / 15 March 1979
Rn (x,x)=Rn (x,x)=a(x) a (x')P (x-x')12
R n (xxl)=R III (xxl)=a(x)a(xl) PI(x-xl)1 2

SA2(fX) = B2 a2 PIF(fx)IH(fX)l 2GB 2 a2 PF(fX)IH(fX)1 2, (37)
where PIF(fx) = 5ii [PI(x)]. Because PI(Ax) is verynarrow compared with h (x), the spatial frequencyspectrum of PIF(fX) will be wideband or white comparedwith H(f,). Or, by again approximating P1(Ax) asC5(Ax) as in Eq. (32), Eq. (37) can be written as
SA2(fX) = CB4 a4 [lH(fx)i lH(fx)l2]. (38)
Thus, as h(x) becomes wider, H(fx)12 becomes nar-rower, and the total noise power output will decreasebecause of the smaller nonzero ranges over whichSA2(fX) will exist.
This completes the analysis of the A2 model. It hasbeen shown by several approaches that the resolutionof the reflectance information is reduced as the systemfunction is widened to reduce the noise power or noisefluctuations. The model for envelope detection willnow be developed to see how the system function affectsthat method of detection.
D. Model for Detection of A
The model for the measurement of the amplitude ismuch more difficult because of the square root involved.The mean of the amplitude from Eqs. (16) and (26) is
E[A(t)] = _ [Jh(a)h(a')a(a + vt)a(a' + vt)Pt(Aoa)dada1
=- C1/2 fh2(a)a2(a + vt)da1]
Brt e11/2- C1/2 [jh 2(vt - x)a2()dx] * (39)
This is the same expression (within a constant) as thesquare root of the mean of A2 from Eq. (33). Therefore,the comments following Eqs. (35) and (36) regarding theelectronics bandwidth and the system function applyfor the detection of the amplitude too.
Recall the covariance of A from [Eq. (29)] was ex-pressed in terms of the elliptical integrals of K and E.As such, it is difficult to interpret. However, usingpower series representation for K and E, we obtain2 0
CA(t't') = 17r [Q(U ) 2 + I c,(t,t9]416I Iaj 16'+ 1. [C+(t't)]6 25 [ 1U ) +j (40)
64 g 06 a
The first term, except for the constants, is the same asthe covariance of A2 from Eq. (30), where the square ofCi (t,t') implied that the noise could be modeled as theproduct of two independent noise processes. In Eq.(40) the sum of the higher order powers of Ci (t,t')implies that the noise can be modeled as a sum of in-dependent noise processes. Additionally, each term inthe sum can be represented as a product of m inde-pendent noise processes, where m is equal to the powerof the Ci (t,t') term involved.
For any t' not equal to t in Eq. (40), the term Ci(t,t')is less than a?, so the terms of Eq. (40) are rapidly de-creasing with the higher powers of [C(t,t')]/1a. As thecoherence time (length) of C(t,t') of Eq. (18) is ap-proached, [Ci(t,t')]/ u? becomes small, and Eq. (40) canbe quite accurately approximated by the first term.Except for the constants this approximation yields thesame form as the covariance of A2 from Eq. (34). Thusthe coherence distance can be considered to be ap-proximately the same for both methods of detection.
If the power spectral density of Eq. (40) is determinedin a manner similar to the case for A2 from Eq. (38), theresult would be a series of double, quadruple, and higherorder convolutions. This means that the noise poweris unlimited in frequency, although it is reduced inamplitude at each higher convolution. In fact, if thevalue of the first term of Eq. (40) at t = t' is comparedto the variance of A using Eq. (26), the result is
2
i 7r6 =t (2 0.915.
- (2 - r/2)2
(41)
Equation (41) shows that 91.5% of the noise power isconcentrated in the first term of the covariance of Awhen the covariance of function is at its maximumvalue, i.e., at t = t'. It was also determined in the pre-vious paragraph that the first term was an excellentapproximation for the covariance of A when the co-variance is small, i.e., at the coherence time. Thus, asa first approximation, the noise covariance function canbe represented as
(42)
Again, except for the constants, the noise represen-tation is now the same as that for A2 given by Eq. (30).With this approximation, the model for the detectionof A is given in Fig. 8.
The system parameters now have the same effect onthe resulting image in both the A and A2 models, al-though the final image is not the same because of thesquare root of the mean in the model for the detectionof A. In fact, the mean of A2 is proportional to a2, i.e.,the square of the field reflectivity, and thus is directlyrelated to the intensity of the reflectivity term thatpeople are familiar with. On the other hand, the meanof A is proportional to the field reflectivity a, and theresult is an image that may not be natural to the humanobserver. However, this image is still a valid repre-sentation of the surface characteristics.
15 March 1979 / Vol. 18, No. 6 / APPLIED OPTICS 789
[C,(ttl)]2CA (t, 0 n-t '
16a2i

IV. Conclusions
The development of a system model for two methodsof detecting the output signal in a heterodyne line-scanimaging system has been completed. In the develop-ment of the model, the object's surface was consideredto be a zero mean Guassian random process, but it waslater argued that the results were typical of any natu-rally rough surface. A system function was definedwhich represented the combined effect of the detectorfield of view and the laser beam amplitude function.The complex current was used in determining the sta-tistics of the optical detector's output, and it was shownthat the mean signal was zero when the object's surfacewas rough compared to an optical wavelength. It wasalso shown that the correlation function of the reflectedfield was very narrow, of the order of tenths and hun-dredths of a millimeter. This narrow correlationfunction meant that the reflected field was now spatiallycoherent over just a very short distance. This fact al-lowed quadratic phase terms to be neglected and re-sulted in a model that was the same for both far-fieldand near-field cases.
Because the mean of the detector output current waszero, a method of detecting the amplitude or amplitudesquared of the current was included. The amplitudeis related to the sum of the squares of the real andimaginary parts of the current, so the quadrature modelwas presented. The quadrature outputs were shownto be identically distributed, zero mean joint Gaussianrandom processes. Based on this result, it was con-cluded that the first-order density of the amplitude wasRayleigh and that the model was now similar to thewell-known narrowband noise model. The SNR foreach detection method was calculated from the mo-ments of the Rayleigh density, but in both cases it wasindependent of the system parameters.
However, a second moment model for each detectionprocess, which included the system parameters, wasdeveloped. The respective mean (signal) and covar-iance (noise) functions were all expressed in terms of thepreviously determined covariance function of thecomplex current. The amplitude squared signal modelwas shown to be identical with the linear system modelfor an incoherent imaging system. It was shown thatthe resolution ability of the system degraded as thewidth of the system function was increased in space.The amplitude signal model was developed and shownto be identical with the amplitude squared signal modelexcept for some constants and the final square root ofthe output. The filtering effects of the system functionwere the same for both models.
In each model, the noise covariance was shown to berepresented by the square of the complex current cor-relation function, and unlike some common noise pro-cesses it was a function of the reflectivity signal. The
models provided considerable information about thespeckle noise. The coherence length of the noise pro-cess represents the period that noise is related and thuscorresponds to the average speckle cell size in the image.This correlation distance was determined to be equalto the width of the system function except that when thereflectivity varied significantly over the same distance,it could become smaller. The contrast in the image dueto the speckle noise was given by the square root of thevariance and could be determined from the noise rep-resentation in the models. The models show how thesystem parameters affect the signal and the specklenoise, and they provide the basis for developing futuresignal processing methods that will optimize the desiredimage.
References1. R. D. Hudson, Jr., Infrared Systems Engineering (WileyThter-
science, New York, 1969).2. J. M. Lloyd, Thermal Imaging Systems (Plenum, New York,
1975).3. J. Opt. Soc. Am. 66, (1976), Special issue on speckle.4. J. C. Dainty, et al., Topics in Applied Physics, Vol. 9 (Springer,
New York, 1975).5. M. G. Miller et al., J. Opt. Soc. Am. 65, 779 (1975).6. B. W. Lyons, "A Speckle Noise Model for Optical Heterodyne
Line-Scan Imagery," unpublished Masters Thesis, Air ForceInstitute of Technology, Wright-Patterson AFB, Ohio 45433(December 1977), GEO/EE/77-4.
7. P. Beckmann and A. Spizzichino, The Scattering of Electro-magnetic Waves from Rough Surfaces (Macmillan, New York,1963).
8. J. W. Goodman, Proc. IEEE 53, 1688 (1965).9. W. K. Pratt, Laser Communication Systems (Wiley, New York,
1969).10. S. F. Jacobs and P. J. Rabinowitz, in Quantum Electronics Pro-
ceeding of the Third International Congress (1963), P. Grivetand N. Bloembergen, Eds. (Columbia U. P., New York, 1964).
11. M. Schwartz, W. R. Bennett, and S. Stein, CommunicationSystems and Techniques, (McGraw-Hill, New York, 1966).
12. C. N. Kurtz, J. Opt. Soc. Am. 62,982 (1972).13. R. E. Ziemer and W. H. Tranter, Principles of Communications
(Houghton Mifflin, Boston, 1976).14. W. B. Davenport, Jr., Probability and Random Processes
(McGraw-Hill, St. Louis, 1970).15. D. Middleton, An Introduction to Statistical Communication
Theory- (McGraw-Hill, New York, 1960).16. G. Gould, et al., Appl. Opt. 3, 648 (1964).17. J. W. Goodman, Introduction to Fourier Optics (McGraw-Hill,
St. Louis, 1968).18. A. Papoulis, Probability, Random Variables, and Stochastic
Processes (McGraw-Hill, St. Louis, 1965).19. J. Bendat, Principles and Applications of Random Noise Theory
(Wiley, New York, 1958).20. R. Deutch, Nonlinear Transformations of Random Processes
(Prentice-Hall, Englewood Cliffs, N.J., 1962).21. W. M. Brown, IEEE Trans. Aerosp. Electron. Syst. AES-3, 217
(1967).22. W. M. Brown and C. J. Palermo, Random Processes, Communi-
cations and Radar (McGraw-Hill, New York, 1969).
790 APPLIED OPTICS / Vol. 18, No. 6 / 15 March 1979