Embed Size (px)
Citation preview
Sparse Graphs(from noisy data, obviously)
Ernst Wit
Johann Bernoulli InstituteUniversity of Groningen
October 4, 2012
Ernst Wit Sparse graphs

God is the answer. But what was the question?
A common design: Many (possibly: redundant) items are (sometimes:automatically) screened (possibly: through time).
Possible question
Can we find a sparse dependency structure among the items, possibly withlongitudinal structure.
Ernst Wit Sparse graphs
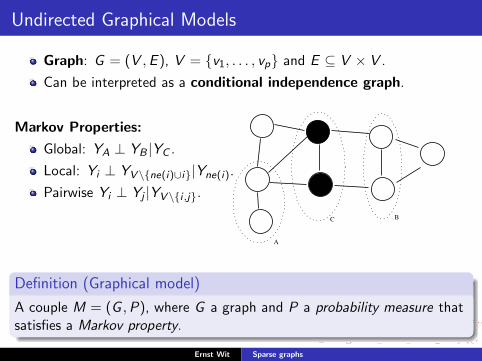
Undirected Graphical Models
Graph: G = (V ,E ), V = {v1, . . . , vp} and E ⊆ V × V .
Can be interpreted as a conditional independence graph.
Markov Properties:
Global: YA ⊥ YB |YC .
Local: Yi ⊥ YV \{ne(i)∪i}|Yne(i).
Pairwise Yi ⊥ Yj |YV \{i ,j}.
A
C B
Definition (Graphical model)
A couple M = (G ,P), where G a graph and P a probability measure thatsatisfies a Markov property.
Ernst Wit Sparse graphs

Factorization and Markov properties
Theorem (Hammersley-Clifford)
If the density p=dP is positive and continuous then
Factorization⇐⇒ Markov(Global/Local/Pairwise)
Factorization: f (y) = 1z
∏c∈C hc(yc), where c are cliques of G .
c1
c2
c3
c4
c5
c6
Example:Graph (left) contains6 cliques (completesubgraphs), and so
p(y) =6∏
i=1
hi (yci ).
Ernst Wit Sparse graphs

Gaussian graphical models
Definition (Gaussian graphical model)
GGM is a graphical model (G ,P), where P is determined by:
Y ∼ N(µ,Θ−1).
Note:
p(y) ∝ exp
(−1
2(y − µ)′Θ(y − µ)
)=
p∏i=1
p∏j=1
e−(yi−µi )(yj−µj )θij/2
=∏c∈C
hc(yc)
So, if θij = 0, then certainly nodes i and j are not in same clique:
θij = 0⇔ Yi ⊥ Yj |YV \{i ,j}.
Ernst Wit Sparse graphs

Traditional: Hypothesis Test
H0 : θij = 0 ⇐⇒ Edge (i , j) is absent
H1 : θij 6= 0 ⇐⇒ Edge (i , j) is present
Dev , 2(l(Θ̂)− argmaxΘ∈H0l(Θ)).
argmaxΘl(Θ)
The space of values for Θ
The space H0
b
bDev
H1
Under H0 and regularity conditions Dev ∼ χ21
p − value = Pr(χ21 ≥ observed deviance)
H0 is rejeced if p-value < 0.05
Ernst Wit Sparse graphs

Problems with Hypothesis Test
Hypothesis tests have poor model selection properties.
Where do we start to test?
Multiple testing problem.
Space of models is of size 2(p2).
If p > n, then S is singular.
Ernst Wit Sparse graphs
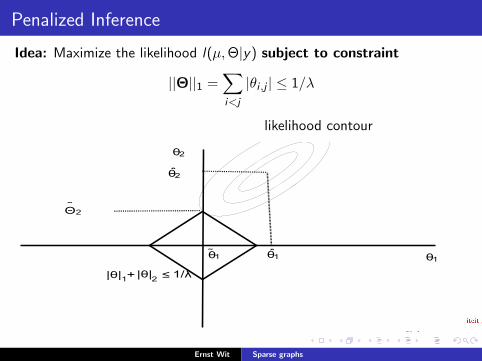
Penalized Inference
Idea: Maximize the likelihood l(µ,Θ|y) subject to constraint
||Θ||1 =∑i<j
|θi ,j | ≤ 1/λ
likelihood contour
θ1
θ2
|θ|1+|θ|2 ≤ 1/λ
θ̂1
θ̂2
Θ̃ 2
θ1˜
Ernst Wit Sparse graphs

Motivation: Dynamic Genomic Networks
Transcription: snap-shot of gene activity in time and space (tissue).
High-throughput microarray and RNA-seq data measure gene activity.
Running example: T-cell time-series dataset.
Temporal expression of 58 genes for 10 unequally spaced time points.
At each time point there are 44 separate measurements.
Definition (Aim)
Determine dynamic genomic graph G on basis of {Y (i)gt }gti .
Ernst Wit Sparse graphs

Motivation: Features of a Dynamic Genomic Process
“p >> n”:I Number of observations smaller than number of variables.I Thousands of variables and hundreds of observations.
Structure:I Highly complex and structured phenomenon.I Possibly with additional topographical structure (small world).
Sparsity: only small number of links between nodes.
Ernst Wit Sparse graphs

Dynamic Genomic Graphs
Γ be a set of “genes”.
T be a set of ordered “time points”.
Definition (Dynamic genomic graph)
A dynamic genomic graph is a pair G = (V ,E ).
Vertices: V = {vij}i∈Γ,j∈T , where Γ and T are finite sets.
Links: ordered pair of elements E ⊆ V × V .
Time1
Time 2v11 v21
v31 v41
v12 v22
v32 v42
Ernst Wit Sparse graphs

Coloured graphs
Definition (Coloured graph)
A coloured graph is a triplet GF = (V ,E ,F ), where G = (V ,E ) is a graphand F is a mapping on the links, i.e.:
F : E → C ,
where C is a finite set of colours.
Ernst Wit Sparse graphs

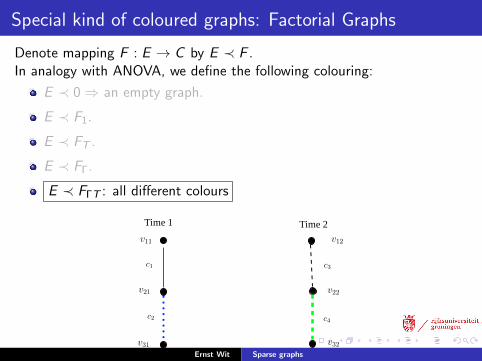
Special kind of coloured graphs: Factorial Graphs
Denote mapping F : E → C by E ≺ F .In analogy with ANOVA, we define the following colouring:
E ≺ 0⇒ an empty graph.
E ≺ F1.
E ≺ FT .
E ≺ FΓ.
E ≺ FΓT .
v12
v22
v32
Time 1 Time 2
v11
v21
v31
Ernst Wit Sparse graphs

Special kind of coloured graphs: Factorial Graphs
Denote mapping F : E → C by E ≺ F .In analogy with ANOVA, we define the following colouring:
E ≺ 0⇒ an empty graph.
E ≺ F1: same colour for all links
E ≺ FT .
E ≺ FΓ.
E ≺ FΓT .
v12
v22
v32
Time 1 Time 2
v11
v21
v31
c1
Ernst Wit Sparse graphs

Special kind of coloured graphs: Factorial Graphs
Denote mapping F : E → C by E ≺ F .In analogy with ANOVA, we define the following colouring:
E ≺ 0⇒ an empty graph.
E ≺ F1.
E ≺ FT : same colour across all genes
E ≺ FΓ.
E ≺ FΓT .
v12
v22
v32
Time 1 Time 2
v11
v21
v31
c1 c2
Ernst Wit Sparse graphs

Special kind of coloured graphs: Factorial Graphs
Denote mapping F : E → C by E ≺ F .In analogy with ANOVA, we define the following colouring:
E ≺ 0⇒ an empty graph.
E ≺ F1.
E ≺ FT .
E ≺ FΓ: same colour across all times
E ≺ FΓT .
v12
v22
v32
Time 1 Time 2
v11
v21
v31
c1
c2
Ernst Wit Sparse graphs
Special kind of coloured graphs: Factorial Graphs
Denote mapping F : E → C by E ≺ F .In analogy with ANOVA, we define the following colouring:
E ≺ 0⇒ an empty graph.
E ≺ F1.
E ≺ FT .
E ≺ FΓ.
E ≺ FΓT : all different colours
v12
v22
v32
Time 1 Time 2
v11
v21
v31
c3c1
c2 c4
Ernst Wit Sparse graphs

Natural Partitions
Definition (Natural partition)
Let E = {Si ,Ni}nT−1i=0 be subsets of links where Si ,Ni are defined as follows:
Si = {{(vjt , vj,t+i ), (vj,t+i , vjt)}|j ∈ Γ, t = 1, . . . , nT − i},
andNi = {{(vjt , vk,t+i ), (vk,t+i , vjt)}|∀j 6= k ∈ Γ, t = 1, . . . , nT − i}.
The natural partitions imply subgraphs of G and imply partions of Θ for GGMs:
Θ =
S0 N0 S1 N1 S2 N2 . . . . . .
S0 N1 S1 N2 S2 . . . . . .S0 N0 S1 N1 S2 N2
S0 N1 S1 N2 S2
S0 N0 S1 N1
S0 N1 S1
Ernst Wit Sparse graphs
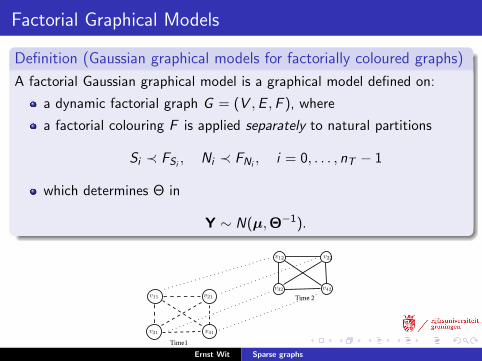
Factorial Graphical Models
Definition (Gaussian graphical models for factorially coloured graphs)
A factorial Gaussian graphical model is a graphical model defined on:
a dynamic factorial graph G = (V ,E ,F ), where
a factorial colouring F is applied separately to natural partitions
Si ≺ FSi , Ni ≺ FNi, i = 0, . . . , nT − 1
which determines Θ in
Y ∼ N(µ,Θ−1).
Time1
Time 2v11 v21
v31 v41
v12 v22
v32 v42
Ernst Wit Sparse graphs

Example: Factorial Gaussian Graphical Model
Model:
(S0 ≺ 1), N0 ≺ FT , S1 ≺ 1, N1 ≺ 0.
Factorial coloured graph:
Time1
Time 2v11 v21
v31 v41
v12 v22
v32 v42
Precision Matrix:
Θ =
θ1 θ2 θ2 θ2 θ4 0 0 0θ1 θ2 θ2 0 θ4 0 0
θ1 θ2 0 0 θ4 0θ1 0 0 0 θ4
θ1 θ3 θ3 θ3
θ1 θ3 θ3
θ1 θ3
θ1
Ernst Wit Sparse graphs

Penalized likelihood for GGMs
Consider an experiment: |Γ| genes measured across |T | time points.
Assume n iid samples y(1), . . . , y(n), where y(i) = (y(i)1 , . . . , y
(i)ΓT ).
Assume Y(i) ∼ N(0,Θ−1), then
Likelihood:l(Θ|y) ∝ log(Θ)− tr(SΘ).
AIM: Optimization of penalized likelihood:
Θ̂ := argmaxΘ{l(Θ|y)}
subject to
Θ � 0;
||Θ||1 ≤ 1/λ;
some factorial colouring F .
Ernst Wit Sparse graphs
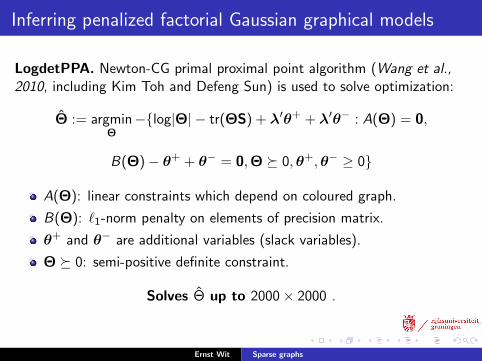
Inferring penalized factorial Gaussian graphical models
LogdetPPA. Newton-CG primal proximal point algorithm (Wang et al.,2010, including Kim Toh and Defeng Sun) is used to solve optimization:
Θ̂ := argminΘ−{log|Θ| − tr(ΘS) + λ′θ+ + λ′θ− : A(Θ) = 0,
B(Θ)− θ+ + θ− = 0,Θ � 0,θ+,θ− ≥ 0}
A(Θ): linear constraints which depend on coloured graph.
B(Θ): `1-norm penalty on elements of precision matrix.
θ+ and θ− are additional variables (slack variables).
Θ � 0: semi-positive definite constraint.
Solves Θ̂ up to 2000× 2000 .
Ernst Wit Sparse graphs

T-cell data
Aim. Use large time-course experiment to characterize response of humanT-cell line (Jurkat) to PMA and ionomycin treatment.
T-cell time-series dataset
Temporal expression of 58 genes for 10 unequally spaced time points.
At each time point there are 44 separate measurements.
See Rangel et al. (2004) for more details.
Ernst Wit Sparse graphs

Application to T-cell data
S0 ≺ F1,N0 ≺ FΓ,S1 ≺ FT ,N1 ≺ FΓ
Θ =
S1
0 N10 S1
1 N11 0 0 . . . . . .
S10 N1
1 S11 0 0 . . . . . .
S20 N2
0 S21 N2
1 0 0S2
0 N21 S2
1 0 0S3
0 N30 S3
1 N31
S30 N3
1 S31
N1
0 = N20 = . . . = N10
0 N11 = N2
1 = . . . = N101
RB1
SIVA
LCK
ITGAM
SMN1
CASP8
PCNA
CCNC
PDE4B
APC
ID3
CDK4
TCF12
CDC2
CCNA2
PIG3
CASP4
TCF8
GATA3
CSF2RA
MPO
CYP19
CASP7
JUNB
NFKBIA
RB1
SIVA
ITGAM
SMN1
PCNA
CCNC
ID3
SLA
CDK4
TCF12
MCL1
CDC2
CCNA2
MYD88
TCF8
GATA3
IL2RG
CSF2RA
MPO
CYP19
CASP7
JUNBNFKBIA
Ernst Wit Sparse graphs

What have we achieved so far? And problems!
Summary:
Penalized Gaussian graphical models
Coloured graphs
Natural partitions
Factorially coloured Gaussian graphical models
Problems:
1 Factorial colouring not particularly flexible in modeling time dynamics.
2 Gaussian assumption may be too restrictive for realistic genomic data.
3 How to choose the appropriate level of penalization?
Ernst Wit Sparse graphs
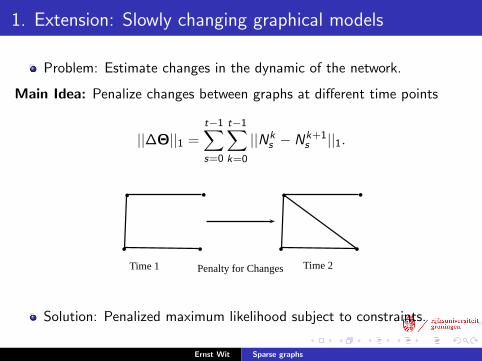
1. Extension: Slowly changing graphical models
Problem: Estimate changes in the dynamic of the network.
Main Idea: Penalize changes between graphs at different time points
||∆Θ||1 =t−1∑s=0
t−1∑k=0
||Nks − Nk+1
s ||1.
b b
bb
b b
bb
Penalty for ChangesTime 1 Time 2
Solution: Penalized maximum likelihood subject to constraints.
Ernst Wit Sparse graphs

Implement Slowly Changing via logdetPPA
Θ̂ := argminΘ{− log |Θ|+ tr(SΘ) + λ1x+ + λ1x− + λ2y+ + λ2y−}
subject to A(Θ)− y+ + y− = 0
B(Θ)− x+ + x− = 0
C(Θ) = 0
Θ � 0, x+, x−, y+, y− ≥ 0.
A(Θ): set of linear constraints which depends on the ||∆Θ||1.
B(Θ) `1-norm penalty on element of precision matrix.
C (Θ) zero elements a priori.
x+, x−, y− and y+ are slack variables.
Ernst Wit Sparse graphs

Application to a time-course dataset
S0 ≺ FΓT ,N0 ≺ 1,N1 ≺ 1,N2 ≺ 0
Θ =
S1
0 N10 S1
1 N11 0 0 . . . . . .
S10 N1
1 S11 0 0 . . . . . .
S20 N2
0 S21 N2
1 0 0S2
0 N21 S2
1 0 0S3
0 N30 S3
1 N31
S30 N3
1 S31
N1
0 |N10 | − |N2
0 | |N20 | − |N3
0 |N0 at time 1
NMB0886
NMB1980
NMB1378NMB1401
NMB0102
NMB1321
NMB0046
NMB0438
NMB0125
NMB0888
NMB1322
NMB1811
NMB2141
NMB1312
NMB0211
NMB0889
NMB1437
NMB0206
NMB1580
NMB1808
NMB1857
NMB1728
NMB0467
NMB1377
NMB0035
NMB1394
NMB0568
NMB2037
NMB0720
NMB0559
NMB1342
NMB1058
NMB1809
NMB0700
NMB1973
NMB0944
NMB1812
NMB2038
NMB0926
NMB1053 NMB0721
NMB0791
NMB1458
NMB1541
NMB1810
NMB1636
NMB1972
NMB0744
1
NMB0886NMB0125
NMB0888NMB1580
NMB0926
NMB1053
NMB0721
NMB1810
NMB1636
NMB0744
7
NMB1321
NMB1857
NMB0926
NMB1053
Ernst Wit Sparse graphs

2. Extension: Non-Normality
Problem: Non-Normality of the data (e.g. T-cell).
19.5 20.0 20.5
0.00.5
1.01.5
2.0
FYB
Densi
ty
18.2 18.6 19.0
0.00.5
1.01.5
2.02.5
MPO
Densi
ty
15.5 16.5 17.5
0.00.5
1.01.5
2.02.5
3.03.5
MCL1
Densi
tySolution: Copula Gaussian graphical models
Ernst Wit Sparse graphs
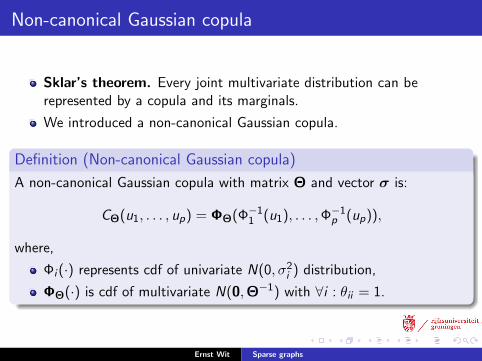
Non-canonical Gaussian copula
Sklar’s theorem. Every joint multivariate distribution can berepresented by a copula and its marginals.
We introduced a non-canonical Gaussian copula.
Definition (Non-canonical Gaussian copula)
A non-canonical Gaussian copula with matrix Θ and vector σ is:
CΘ(u1, . . . , up) = ΦΘ(Φ−11 (u1), . . . ,Φ−1
p (up)),
where,
Φi (·) represents cdf of univariate N(0, σ2i ) distribution,
ΦΘ(·) is cdf of multivariate N(0,Θ−1) with ∀i : θii = 1.
Ernst Wit Sparse graphs

Copula Gaussian graphical models
IDEA:
Graph exists on a hidden Gaussian variable Z ∼ N(0,Θ),
Z gives rise to observed non-Gaussian data Y.
b
b
b
b
b
b
b
v1v2
v3
v4v5
v6v7
F1
F2
F7
Marginal Distribution: F
...
Y1 = F−11 (φ(Z1))
Y2 = F−12 (φ(Z2))
Y7 = F−1p (φ(Z7))
...
Observed: YLatent Variable: Z ∼ N(µ,Θ−1)
We consider the Fi as nuisance parameters.
For continuous variables: 1-to-1 relationship between Z and Y .For discrete variables, relationship is more complicated!
Ernst Wit Sparse graphs

Gaussian Copula for Ordinal Variables
If Y = (Y1, . . . ,Yp) consist of ordinal variables, e.g.,
Yi ∈ {1, 2, 3, 4}, severity score for item i
Assume existence latent variable Z = (Z1, . . . ,Zp) ∼ N(0,Θ−1), such that
Y(k)i < Y
(l)i ⇐⇒ Z
(k)i < Z
(l)i .
−3 −2 −1 0 1 2 3
0.0
0.1
0.2
0.3
0.4
P Y 1=0
P Y 1=1
P Y 1=2
P Y 1=3
P Y 1=4
−1 0 1 2 3 4 5
0.0
0.2
0.4
0.6
0.8
1.0
y
F̂(y
)●
●
●
●
●
Values of zi that correspond to yi ,
D(yi ) = {z ∈ R | F−1i (Φi (z)) = yi}
Ernst Wit Sparse graphs

Maximum Likelihood Estimation
Gaussian copula density function is:
φΘ(u) = |Θ|1/2exp(−1
2Φ−1(u)′(Θ− I)Φ−1(u)),
u = F(z) = (F1(z1), . . . ,Fp(zp))
The profile marginal likelihood is:
L(Θ|D, F̂1, . . . , F̂p) =
∫z∈D
φΘ(z)dz
Problem: Marginal likelihood is hard.
Ernst Wit Sparse graphs

Solution: The iterative EM Algorithm
E-Step: Compute the quantity Q(Θ|Θ(m)) = EZ[l(Θ)|Y,Θ(m)]
Q(Θ | Θ(m)) = E
[n∑
i=1
(1
2log |Θ| − 1
2Z′iΘZi +
1
2Z′iZi
)| yi ,Θ(m)
]
=n
2
{log |Θ| − 1
n
n∑i=1
tr(
ΘE[ZiZ
′i | Zi ∈ D(Yi ),Θ
(m)])
+1
n
n∑i=1
tr(E[ZiZ
′i | Zi ∈ D(Yi ),Θ
(m)])}
=n
2
{log |Θ| − tr
(ΘR̄)
+ tr(R̄)},
R̄ = E[ZiZ
′i | Zi ∈ D(Yi ),Θ
(m)].
M-Step: Maximize the quantity Q(Θ|Θ(m)) subject to ||Θ||1 ≤ 1/λ andcolouring F .
Problem: Obtaining the quantity E[ZiZ
′i | Zi ∈ D(Yi ),Θ
(m)].
Ernst Wit Sparse graphs

Wilhem, S. and Manjunath, B. (2010)
The second moment is:
R̄ = E[ZsZt | (L,U) ∈ D,Θ(m)
]=
p∑k=1
ρ(m)sk ρ
(m)tk [LkGk(Lk)− UkGk(Uk)]
+
p∑k=1
ρ(m)tk
∑l 6=k
(ρ
(m)tl − ρ
(m)kl ρ
(m)tk
)× {[Gkl(Lk , Ll)− Gkl(Lk ,Ul)]
− [Gkl(Uk , Ll)− Gkl(Uk , Ll)]}Compute
Gk(zk) =
∫ U1
L1
· · ·∫ Uk−1
Lk−1
∫ Uk+1
Lk+1
· · ·∫ Up
Lp
φp(zk , z−k | Θ(m))dz−k
Gkl(zk , zl) =
∫ U1
L1
· · ·∫ Uk−1
Lk−1
∫ Uk+1
Lk+1
· · ·∫ Ul−1
Ll−1
∫ Ul+1
Ll+1
· · ·∫ Up
Lp
φp(zk , zl , z−k,−l | Θ(m))dz−k,−l ,
Ernst Wit Sparse graphs

Application of Gaussian copula graphical models to T-cell
S0 ≺ F1,N0 ≺ FΓ,S1 ≺ FT ,N1 ≺ FΓ
RB1
MAPK9
SMN1
E2F4
CCNC
APC
TCF12
CCNA2
CASP4
TCF8
GATA3
CSF2RA
CYP19
JUNB
RB1
MAPK9
JUND
ITGAM
SMN1CCNC
APC
TCF12 CCNA2
PIG3
CASP4TCF8
GATA3
CSF2RA
MPO
CYP19
JUNB
N10 = N2
0 = . . . = N100 N1
1 = N21 = . . . = N10
1
Ernst Wit Sparse graphs
3. Appropriate level of penalization
Model selection
The penalty parameter λ determines the amount of sparsity in the model.
AIC or BIC are not appropriate for penalized likelihoods, because
l̇(Θ̂λ) 6= 0.
Steps for finding the appropriate level of sparsity?
1 We define an approximate problem (AP);
2 We define an information criterion of the AP;
3 We show that limit of solution of AP is meaningful for our problem
Ernst Wit Sparse graphs
AP: Approximated problem
Let Θ̂λ,α be the maximizer of the penalized likelihood
lλ,α(Θ) =n∑
k=1
lk(Θ)− nλPα(Θ),
over positive definite matrices, where
Pα(Θ) =
p∑i ,j
|θij |α,
and |θ|α = (1/α)[log{1 + exp(−αθ)}+ log{1 + exp(αθ)}].Note:
limα→∞ |θ|α = |θ|.Θ̂λ,α is an M-estimator of ψ-typ, a solution of:
n∑k=1
(lyk (Θ̂λ,α)− λ|Θ|α
)x = 0.
Ernst Wit Sparse graphs

GIC for Approximated Problem
Konishi and Kitagawa (2008) defined the GIC for M-estimators:
GIC (Θ̂λ,α) = −n{log |Θ̂λ,α| − Tr(Θ̂λ,αS)}+ 2Tr{R−1(α)Q},
where R(α) is square matrix of order p2
R(α) =1
2Θ̂−1λ,α ⊗ Θ̂−1
λ,α + λP ′′α(Θ̂λ,α), (1)
and P ′′α(q̂λ,α) diagonal matrix with p2 elements (|θ̂11|′′α, θ̂12|′′α, . . . , |θ̂pp|′′α)and
Q(α) =1
4vectSvectST − 1
4n
n∑k=1
vectkvectTk
= Q
Ernst Wit Sparse graphs

Limit of AP approximation GIC
The L1 penalized estmimators are no M-estimators, so K&K GIC is notdefined. We define the GIC as the limit of the approximated one.
Definition (“GIC” for L1 penalized graphical models.)
GIC(λ) = −n{log |Θ̂λ| − Tr(Θ̂λS)}+ 2Tr(R−1Q),
Matrix Q is square matrix of order p2 (as above) and
R[I , I ] = Θ̂λ ⊗ Θ̂λ[I , I ]−1,
where I are the non-zero elements in vectΘ̂λ.
Ernst Wit Sparse graphs

Performance of the GIC: simulation study
N = 8
TP Sens. TN Spec. MCC Accuracy
GIC 13.0 0.531 51.0 0.543 0.044 0.545(4.9) (0.203) (16.3) (0.173) (0.088) (0.102)
AIC 0.0 0.000 94.0 1.000 0.000 0.783(2.1) (0.090) (7.6) (0.081) (0.057) (0.045)
BIC 0.0 0.000 94.0 1.000 0.000 0.783(1.6) (0.076) (6.1) (0.065) (0.057) (0.035)
N = 12
GIC 16.0 0.667 45.0 0.479 0.120 0.517(4.3) (0.176) (13.8) (0.147) (0.092) (0.090)
AIC 2.0 0.077 93.0 0.989 0.093 0.783(6.5) (0.264) (19.8) (0.211) (0.099) (0.112)
BIC 0.5 0.019 94.0 1.000 0.008 0.783(0.9) (0.038) (1.1) (0.011) (0.095) (0.008)
Results p = 16; Present Links = 26; Absent Links=102
Ernst Wit Sparse graphs

Conclusion and Discussion
Summary:
Factorial graphical models based on coloured graphs.
Slowly changing graphical models.
Extension: Copula Gaussian graphical models.
How do we evaluate model complexity?
Questions:
How would we adapt model with other factors?
Could we combine Copulas with slowly changing networks?
How to introduce latent structures?
Ernst Wit Sparse graphs





























