-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
1/25
Subscribe
what-when-how
In Depth Tutorials and Information
SPACECRAFT GUIDANCE, NAVIGATION ANDCONTROL SYSTEMS
The difficulties in maneuvering a vehicle through space are not
intuitively obvious to someone who has not been
involved in the field. After all, we have been exposed to the
television and movie concepts of space travel,
wherein there seems to be almost unlimited electrical power,
rocket thrust, and propellant, and the protagonist
simply flies off to a distant moon or planet using visual
references for navigation.
Actually, the finite limits of electrical energy, thrust, and
propellant on a vehicle are the driving forces that
demand efficient and accurate equipment to perform the functions
of steering and navigation while keeping the
vehicle attitude stabilized. Added to these restrictions are the
needs for minimum volume and mass. An intricate
system results that is extremely difficult to design, construct,
and test and usually is one of the most expensive
on the vehicle.
Terminology
As in most fields, the space industry has a set of terms and
definitions peculiar to the field that, unfortunately,
are not always consistent in meaning. The term guidance system
is sometimes used interchangeably for
guidance and navigation system or guidance, navigation, and
control system or guidance and control
system. In this article, the terms are used as follows:
Guidance means the actual steering of the vehicle as it travels
through space. Guidance commands may
originate from a crew onboard, from an onboard computer, or from
external sources via radio commands. In
addition, if the thrust of a space vehicle is variable and
controllable, the command for modulating the thrust isusually a
guidance function.
Navigation is the measurement of the location of the vehicle in
space and plotting the course of the vehicle.
Navigational fixes may come from onboard human sightings using
telescopes and sextants, from automatic
CubeSat Shop Check our CubeSat component matrix to help build
your CubeSat mission www.clyde-space.com
Wireless IMU, Miniature Wearable network of 3-DOF inertial
sensors. Stream or log data. Wi-Fi. www.motionnode.com/bus.html
Gold Nanoparticles Research Gold Nanoparticles Monodisperse
1.8nm - 10 microns www.nanopartz.com
Aluminum Castings Investment - "Lost Wax" Process Nadcap -
Aerospace & Defense www.shellcast.com
Solar system China Solar system Suppliers High Quality,
Competitive Price. Made-in-China.com
Medical devices Hardware, Software and Mechanical Design,
Develope, Prototype & Test www.sysmop.com
MEMS Orientation Sensor Low cost AHRS Accurate, easy to use
chrobotics.com/orientation-sensor
VXB Ball Transfer Units Order ball transfer units online
wholesale prices, same day Shipping www.vxb.com
GridConnect Official Adapters, Modules, Sensors & More.
Expert Product Support Available! GridConnect.com/
Ads by Google
GPS Tracking Systems
Solar Systems
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
2/25
onboard star or horizon sensors, or from radio/radar tracking
equipment on the ground.
Control refers to the spatial alignment and stabilization of the
vehicle while the guidance and navigation
functions are being performed, and includes onboard processing
and routing of commands to the devices
(typically thrusters, reaction wheels, control moment
gyroscopes, or aerodynamic surfaces), termed effectors,
that produce reactive forces on the vehicle.
The combination of these three functions into one system results
in the integrated guidance, navigation, and
control system, or simply the GN&C system.
Space Guidance
As mentioned earlier, the finite limits of electrical energy,
thrust, and propellant on a space vehicle are the
reasons one simply cannot point the vehicle toward the target
and fly it there. Further, within the Universe, the
target itself is typically moving, and if the spacecraft were
simply steered toward it, the spacecraft could end up
chasing it. The situation is analogous to that of a shot gunner
who must lead the target, that is, aim at a point
on the flight path ahead of the target so that the shot arrives
at the point where the target will be rather than the
point where it was when the trigger was pulled. Other
complicating factors are the effects of the gravity of Earth,
the Moon, the Sun, and the planets, as well as their individual
rotations if the launch points or landing sites lie on
the surface.
A typical spacecraft trajectory that results from these
conditions has the following
characteristics:
* The launch point is on a rotating Earth (or Moon or
planet).
* The gravitational pull of Earth and the Moon are significant
effects.
* The flight path is curved and is likely to be nonplanar.
* The flight duration may be anywhere from minutes to years.
* The flight path is carefully plotted and optimized during
mission planning.
The guidance function steers the spacecraft along the preplanned
flight path while accommodating these
characteristics.
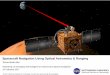
To understand the guidance function better, consider the
following hypothetical mission
trajectory:
1. Launch occurs at Cape Canaveral, Florida, U.S.A. The flight
path bends from a vertical ascent to a due
easterly direction. As orbital altitude, say 200 nautical miles,
is achieved, the spacecraft flies on an elliptical path
in a plane at the same angle to the equator as the latitude of
the launch sitein this case, 28.5.
2. The orbital altitude is then increased to 800 nautical miles
by using the Hohmann transfer. This is a minimum
energy maneuver where the thrusting is done at the apogee and
perigee of the orbit.
3. A plane change is accomplished to permit rendezvous with
another spacecraft in a different plane.4. After rendezvous and
docking with the second spacecraft, say, to replenish propellants,
our spacecraft
undocks and drifts away.
5. The spacecraft then thrusts in a new direction for
transplanetary injection. Escape velocity is achieved, and the
spacecraft leaves Earth on a hyperbolic trajectory toward the
target planet.
6. Along the way, course corrections are made using small
velocity increments {delta Vs in space parlance).
7. The spacecraft flies to the target planet or passes nearby
and continues out into space. These mission segments
are shown pictorially in Fig. 1.
To accomplish the guidance function during each of these mission
segments, the GN&C system must have
reasonably precise knowledge of the pointing direction of the
vehicle and the acceleration during thrusting.
Devices used to obtain this information are called inertial
sensors and include the gyroscope and accelerometer.
Further, for the rendezvous phase, it needs to know the relative
position of the spacecraft to the targeted vehicle;
rendezvous radar can be used for this purpose. For the docking
phase, a near-in distance-measuring sensor, such
as a laser, is required.
Gyroscopes. The gyroscope, or gyro as it is usually called, is a
spinning wheel supported in rings called
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
3/25
gimbals. The gyro has two properties that are useful for
guidance applicationsthe tendency to remain fixed in
alignment in space if undisturbed, and the tendency to precess
predictably when a torque is applied to the gimbal
90 to the spin axis.
Suppose that a gyro were mounted in a spacecraft. Suppose
further that some method is used to spin the
wheel and measure angular movement of the gimbals. A gyro used
in this manner is termed a vertical gyro.
Rotational motion of the spacecraft about all axes except the
gyro spin axis could be measured and used for
guidance purposes. For the case of spacecraft rotation about the
gyro spin axis, a second gyro whose spin axis is
at 90 to the spin axis of the first gyro could be added. Some
aircraft and missiles that have short flight times use
gyros in this manner for attitude control during flight (see,
for example, the discussion in Ref. 1). However, drift
due to bearing friction and difficulties in precise readout of
the gimbal positions usually make this application
unsuitable for spacecraft that have precise trajectory
requirements and long flight durations. In practical
applications for modern spacecraft, the property of precession
is more useful.
Figure 1. Hypothetical space mission.
The spinning wheel in a gyro has an angular momentum and a rate
of precession given, for small disturbances,
by the expressions
where I is the inertia of the wheel, o is the angular velocity,
and T is the torque applied at 90 to the axis of spin.
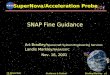
Suppose that a gyro is mounted in a vehicle, as shown in Fig. 2.
In this drawing, the two gimbals on which
the spinning wheel is mounted are clearly visible. As the
vehicle rotates about the axis labeled input axis
transverse to the spin axis, it exerts a torque T on the spin
axis and there is precession about the axis labeled
output axis. A measure of the rate of precession will be
proportional to the vehicle rotation, as shown by Eq. 2.
A gyro used in this manner as a rate sensor is called a rate
gyro. To keep the displacement of the wheel withinnarrow limits, a
restoring torque motor must be used. Further, if the rate of
precession is integrated over time, a
value of vehicle angular displacement is determined. A rate gyro
used in this manner is termed an integrating
rate gyro. This approach to determining vehicular attitude is
usually much more accurate than the vertical gyro
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
4/25
approach.
Figure 2. Gyroscopic precession.
When the gyro is used as a sensor, a number of design
considerations come into play. First, the wheel is spun
using a high-efficiency electric motor. Next, in an effort to
reduce volume, the wheel may be made small and the
spin rate increased to retain high angular momentum, a desirable
feature for measuring very small angular rates.Next, bearings
inevitably cause some disturbing torques on the wheel, and in an
effort to reduce this effect, the
wheel may be supported on a thin film of liquid or gas in lieu
of conventional bearings. An optical pickoff is
preferable to inductive pickoffs to reduce reactive forces and
to measure very small rates. Finally, restoring
torque commands may be in the form of pulses that provide a
compatible interface with a digital computer.
Some design approaches for mechanical gyros used in spacecraft
can be found in Ref. 2. Optical Gyros. Another
type of sensor for measuring rotational displacement is the
so-called ring laser gyro (RLG). This is not a gyro in
the conventional sense in that there are no moving parts. The
principle of operation is the Sagnac Effect
discovered in 1913 (3). The sensing element is a laser beam that
is split into two beams directed clockwise and
counterclockwise in a somewhat circular, closed, vacuum chamber.
Three or more mirrors are arranged in a
ring around the chamber so that the two beams are reflected back
to the source where there is a detector. A
conceptual design approach is shown in Fig. 3. If the chamber is
rotated in either direction about an axis
perpendicular to the plane of the mirrors (i.e., the input
axis), there will be a measurable difference (phase shift)
in the travel times of the two beams because one will travel a
shorter distance than the other. The output of the
RLG can be digitized for rotational rate output and then
integrated over time for a measure of angular
displacement. The disadvantages of RLGs are the difficulty and
cost of achieving and maintaining the necessary
mechanical alignment (4).
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
5/25
Figure 3. Ring laser gyro.
Fiber-optic gyroscopes (FOG), sometimes called interferometric
fiber-optic gyroscopes (IFOG), operate on the
same principle as the RLG in that there are two beams of light
directed in opposing loops, but in this case the
medium is optical fiber. A conceptual drawing of the FOG is
shown in Fig. 4. In general, FOGs are easier to
fabricate and align than RLGs and are more suitable for
microminiaturization. One disadvantage is that scalefactors in FOGs
are usually nonlinear. Also, the fiber must be carefully chosen to
avoid the potential of
becoming unserviceable due to aging or radiation in space. FOGs
have flown on the Clementine and Technology
for Autonomous Operational Survivability (TAOS) spacecraft (4).
An extensive discussion of the FOG may be
found in (5). Vibratory Gyros. The vibratory gyro is another
type of gyro different from the classical mechanical
gyro. The ancestry of this type can be traced to the experiments
of G. G. Bryan, a British physicist, who studied
vibrating wine glasses (6). He discovered that the induced
vibrational pattern on a glass would move (precess) if
the wine glass were rotated about its stem and that the
displacement was proportional to the rotational rate. This
is shown in Fig. 5. An example of this type of gyro is the
hemispherical resonator gyroscope (HRG) discussed in
Ref. 7. In this example, the resonating element that is
analogous to the wine glass is a 30-mm diameter bell
made of fused silica. A surrounding housing induces vibration
and also senses the nodal pattern shift through the
use of capacitive pick-offs. This gyro has been used on
satellites and on the Jet Propulsion Laboratorys Cassini
spacecraft. The main advantage of the HRG is that there are no
moving parts other than the resonator bell. A
disadvantage is that the case must be evacuated and
vacuum-sealed to prevent air damping.
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
6/25
Figure 4. Fiber-optic gyro.
Figure 5. Vibrating bell gyro.
The tuning fork gyro shown in Fig. 6 is another type of
vibratory gyro. In this case, the tines are excited in
the plane of the tines. As the tuning fork is rotated about an
axis parallel to the tines, they tend to continue
oscillating in the original plane, as shown in the vector
diagram in the figure. The vector componentperpendicular to the
plane of the tines is proportional to the rotational rate and may
be measured by capacitive or
optical sensing. Materials used for the tuning fork include
crystalline quartz and silicon. Crystalline quartz is a
highly stable piezoelectric material suitable for micromachining
(8). In the case of silicon, the fork may be part
of an integrated circuit chip where the controlling and sensing
electronics are designed into the chip (9).
Accelerometers. Accelerometers are devices used to sense changes
in velocity. They are made in a number of
ways, but the common feature of most is a mass that moves in
accordance with Newtons second law. This
sensing mass, sometimes called the proof mass, may be suspended
in a number of ways and held in the neutral
position by a magnetic field. As the acceleration is sensed by
the mass and it begins to move, a pickoff detects
the movement and sends a restoring signal through an amplifier
to the restoring coil. Rather than hold the mass
in a neutral position, some designs force the mass to swing back
and forth on a pendulum using a series of back
and forth pulses. This restoring circuit also sends the
restoring pulses to a counter that adds the positive and
negative pulses algebraically; the sum represents the sensed
acceleration. If the counter is coupled with a digital
computer and integrated over time, it can keep an ongoing status
of vehicle velocity. This type of accelerometer,
called a pulsed integrating pendulous accelerometer (PIPA), was
used successfully in the NASA Apollo Lunar
Landing Program (10).
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
7/25
Figure 6. Tuning fork gyro.
Advancements in the past decade in microelectromechanical
systems (MEMS), also known as microsystems
technology (MST), have produced accel-erometers of continually
decreasing size, mass, and power usage (11).
Using the same principles of vibratory gyros discussed before,
sensing elements now include flexing quartz
seismic beams and squeezed film. Movement may be detected by
measuring changes in capacitance betweenthe flexing mass and the
adjacent fixture. Nanotechnology, generally defined as the next
order of size reduction,
will no doubt reduce the size of accelerometers further.
Inertial Measurement Units. The stable platform,
variously referred to as the inertial platform, guidance
platform,or inertial measurement unit (IMU) is a common
application of gyros and accelerometers. In a typical approach,
a group of three single-axis gyros or two
dual-axis gyros is mounted on a rigid platform, and their input
axes are aligned orthogonally. Three single-axis
accelerometers, or two dual-axis accelerometers, are also
mounted orthogonally on the platform. The platform is
then mounted on two or three gimbals, and the restoring torque
signals from the gyros are used to command the
gimbal drive motors. The result is that, after initial erection
and alignment, the platform is maintained inertially
fixed in space. A platform designed in this manner provides an
inertial attitude reference and measures
accelerations along the inertially fixed axes of the platform.
This information can be used by a flight computer to
calculate and maintain the status of attitude, acceleration,
velocity, and position of the platform.
The GN&C system then essentially flies the platform through
space, and the vehicle moves around the
platform in the process.
The three-gyro, three-accelerometer platform was used on the
NASA Apollo Lunar Landing Program (10). The
two-gyro, two-accelerometer IMU is currently used on the NASA
Space Shuttle (12). The Space Shuttle IMU is
shown in Fig. 7. For a further discussion of IMUs, see Ref.
13.
Stap-Down IMU. The limitations of early onboard flight digital
computers encouraged a marriage with
gimballed IMUs because of their ability to erect themselves and
maintain alignment for at least short times using
self-contained torquer motors and dedicated electronics. Even if
the flight computer failed, the IMU alignment
data could be used in these short periods of time to drive
cockpit displays for manual steering. Later on,
dedicated local processors within IMUs off-loaded the flight
computer even more by applying scale factors,correcting biases, and
encoding data words. Over the years, gimballed IMUs have earned a
reputation for
reliability and have become cheaper to produce.
As onboard digital computers have grown in capability there has
been a trend to replace the gimballed
IMU by an assembly of gyros and accelerometers rigidly mounted
on the spacecraft structure. This
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
8/25
approach is called the strap-down IMU or strap-down guidance
system. In this approach, the flight computer
must do all of the angle resolutions (body angles to inertial
angles, or body angles to Euler angles) and
continually maintain the inertial reference. Further,
corrections must be made by the flight computer (or a
dedicated local processor) to eliminate the effects of
spacecraft rotation on the accelerometers. Strap-down
systems are generally smaller than gimballed IMUs, require less
electrical power, and are cheaper to build. A
disadvantage is that they must be continually serviced by the
flight computer, and if either the strap-down
system or the flight computer should fail, inertial reference is
instantly lost.
It is interesting to note that the Apollo Program spacecraft
used a gimballed platform for the primary system
and a limited form of a strap-down IMU for backup. In the latter
case, body-mounted gyros were used for
backup angular rate and displacement information for both the
flight computer for automatic steering and
displays for manual steering. But there were no body-mounted
accelerometers, and if the gimballed IMU
accelerometers failed, thrust duration had to be manually
timed.
Figure 7. Space Shuttle inertial measurement unit.
It seems likely that future trends in MEMS and nanotechnology
will continue to reduce the size and power
usage of strap-down IMUs, making them more and more attractive
for spacecraft use. However, inherent
time-dependent inaccuracies in both types of IMUs require
realignment using noninertial sensor or manual
updating.Rendezvous and Docking Sensors. In the hypothetical
mission described before, there is a phase when the
spacecraft must approach and dock with another spacecraft.
Assuming that the target is passive and if the
spacecraft is not manned so that manual control may be employed,
the maneuver must be accomplished
automatically by the onboard GN&C system. Candidate sensors
for the rendezvous phase would include a
Doppler radar and possibly the Global Positioning System for
rendezvous in Earth orbit (14,15). A laser might
be suitable for docking. Both translational and rotational
commands to the spacecraft attitude control rockets are
required and would be generated by the guidance function of the
GN&C system. The guidance algorithm must
be carefully scripted so that the spacecraft is slowed down
enough to prevent impact damage but still has enough
kinetic energy on impact to overcome the resistance of the
latching mechanism.
Space Navigation
The foundation of space navigation was laid in the seventeenth
century by two major advances. Early in
the century, Johann Kepler, using the observations of Tycho
Brahe, empirically derived his laws of planetary
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
9/25
motion. The first law, and the most important for celestial
navigation, stated that the planets of the solar system
move about the Sun in elliptical orbits and the Sun is at one
focus of the ellipses. Later, Sir Isaac Newton stated
his laws of motion and formulated the law of universal
gravitation. His work confirmed Keplers findings and
allowed extension to celestial bodies other than planets, for
example, comets, and to motions described by
conics other than ellipses. These trajectories include circles
(a special case of the ellipse), parabolas, and
hyperbolas. A discussion of the historical background of this
development can be found in Ref. 16. (See also
article Earth Orbiting Satellite Theory by S. Nerem in this
topic.)
Newtons law of universal gravitation may be stated generally
mathematically as
where F is the magnitude of the force of attraction, m1 and m2
are the masses of the two bodies, s is the distance
between them, and G is the gravitational constant whose
numerical value depends on the system of units used.
The force F points in the same direction as the line s that
joins the two masses.
Equation 3 may be applied with reasonable accuracy to a
spacecraft orbiting Earth if
certain simplifying assumptions are made:
1. Let m1 represent the mass of Earth; Earth is of uniform
density and is spherically symmetrical, that is, the
oblateness of Earth is ignored. This allows the Earth to be
treated as a point mass at its center.
2. Let m2 represent the mass of the spacecraft, so small
relative to the mass of Earth that the center of mass of
the system lies at the center of Earth.
3. Let m1 be fixed in inertial space with the origin of the
reference axes at its center.
4. The spacecraft is in coasting flight with only gravity acting
on it, that is, other forces such as aerodynamic
drag, solar winds, and electromagnetic forces are ignored.
These assumptions allow simplifying the analysis to what is
generally termed the restricted two-body
problem, and the approach may be used for spacecraft operating
near other relatively large bodies, for example,
where m1 represents the Sun, Moon, or one of the
planets.Following the approach of Mueller in Ref. 17, the
spacecraft equations of motion can be derived as follows.
Using polar coordinates and vector notation, we show the
Earth-spacecraft coordinate system in Fig. 8.
Referring to Newtons second law and restating Eq. 3 in vector
form in the polar coordinate system,
where r is the distance between the masses, r is a unit vector
that points along the line joining the two masses.Combining Eqs. 4
and 5 and simplifying produces
where m is defined as a constant m = Gm\. Equation 6 is the
vector differential equation of motion for the
restricted two-body problem. Note that it is independent of
m2.
Using the methods described elsewhere in this topic (see article
Earth Orbiting Satellite Theory by S. Nerem)
and referring to Fig. 8, two equations of importance for an
orbiting spacecraft can be derived from Eq. 6:
and
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
10/25
where g is defined as the flight path angle.
Figure 8. Earth-spacecraft coordinate system.
E is a constant in Eq. 7, termed the specific mechanical energy
of the spacecraft, implying a continual exchange
of kinetic energy and potential energy throughout the orbit. H
in Eq. 8 is called the specific angular momentum
and is also constant throughout the orbit. Notice that as r
increases, v decreases, as might be expected intuitively.
Finally, referring again to the article by S. Nerem, Eq. 6 can
be solved, resulting in the following scalar
equation termed the trajectory equation:
r = q-p- (10)
1+ e cos n
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
11/25
In summary, application of these laws to a spacecraft operating
in a central force field results in trajectories that
are similar to those of celestial bodies. A coasting spacecraft
that has sufficient energy will orbit Earth in a plane
and in an elliptical fashion. With the additional thrusting it
can be made to travel further out to loop around the
Moon and return to Earth, or be captured in an orbit about the
Moon. Even more thrusting will cause it to escapeEarths
gravitational pull and proceed on a parabolic or hyperbolic path to
one of the other planets or into deep
space. The resulting trajectories can be divided into conical
segments, whose combinations are called patched
conics.
As mentioned earlier, limitations in onboard expendables require
planning most space trajectories carefully in
advance of the actual flight to achieve the most economical and
efficient missions. Launch dates, orbital plane
changes, midcourse velocity changes, and rendezvous points must
be determined by working backward from a
desired target along the way and at the end of the flight. This
is usually done by using numerical integration with
considerable trial and error adjustments.
Once the mission plan is determined, navigational sightings are
defined in terms of times, locations, and types
of sensors to be used. At each point, the sightings are made,
the information is routed to the onboard flight
computer, and the inertial platform is aligned. If an adjustment
is required in the state vector of the vehicle,
attitude alignments of the vehicle are made and midcourse delta
Vs are made using the thrusters on the vehicle.
This is repeated as often as required to achieve mission
goals.
On the launch pad, the inertial measurement unit is held in a
locked position relative to the spacecraft until the
last practical moment, usually a few minutes before ignition. In
the minutes after IMU release to actual vehicle
liftoff, the IMU is controlled by a gyrocompass program to keep
it aligned relative to Earth. At liftoff, the IMU
is allowed to go inertial and remain so until the next
navigational update in flight.
During flight, there are several types of navigational updates.
Ground radar tracking is the most common for
spacecraft orbiting Earth. Optical sensors may be used to take
sightings of Earth, the Sun, or the stars. These
sensors include star trackers, horizon scanners, or Sun seekers
for automatic navigation. For the manned NASA
Apollo Lunar Landing Program, the astronauts made visual
sightings using a telescope and sextant that werecoupled
electronically to the flight computer. All of these sensors are
usually carefully mounted on a rigid
navigational base that also supports the inertial measurement
unit, so that angular resolution from an optical
sensor to stable member axes can be made precisely.
Navigational fixes can also be made using the Global Positioning
System (GPS) satellites [see also the
article on Global Positioning System (GPS) elsewhere in this
topic]. This approach can be used to determine
the vehicle attitude as well as the location in space if
multiple receivers are located precisely on the spacecraft
and their relative positions are differentiated (15). Star
Trackers. The star tracker is an automatic optical device
used to determine the angle between the spacecraft and a
luminous body typically outside the solar system.
Planets do not make good targets because they lie in a fairly
narrow band (the zodiac) and their motion is erratic
compared to stars many light-years away. A candidate group of
stars is usually preselected and stored in the
flight computer along with their general location and their
brightness number. The spacecraft is oriented so that
the star tracker points in the general direction of a candidate
star and then searches until a match is made.
Alternately, the tracker itself may be gimballed and allowed to
move relative to the spacecraft axes. Two
different sightings are enough to establish the spacecrafts
position in space or to align the IMU stable member,
but a third or more additional fixes are used for confirmation
and greater accuracy. Star trackers now in
production have angular accuracy of 0.1 arc seconds or less
(18). Star trackers are sometimes used to track other
spacecraft, and they may be combined with cameras for
photography.
Horizon Scanners. The horizon scanner is used to determine the
local vertical of a spacecraft that is orbiting
Earth or other planetary bodies. The local vertical may be
considered a vector from the center of mass of the
vehicle to the center of Earth. Three or more sightings are
taken of Earths horizon, as shown in Fig. 9, and the
angles to the local vertical relative to the spacecraft body
axes or inertial axes are computed geometrically by theflight
computer. Once the local vertical is determined, star sightings can
be made and the latitude and longitude
of the vehicle determined. Since visible light is scattered by
Earths atmosphere, the sensor is usually designed
to detect infrared waves that more sharply define Earths
horizon. Another advantage of infrared is that Earth
radiates heat at infrared wavelengths even when the horizon is
not in the direct rays of the Sun, and,
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
i 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
12/25
consequently, sightings can be made on the dark side of
Earth.
Figure 9. Horizon scanner.
SunEarth Sensors. SunEarth sensors, sometimes individually
referred to as Sun seekers or Earth sensors,
are sometimes used as attitude determination devices for
spacecraft. They are relatively simple to build, and
sightings are usually reliable because the Sun and Earth are
large targets and hard to miss. But for the samereasons and because
of the relatively rapid movement of Earth in its orbit, they are
not usually as accurate for
navigation as other devices previously discussed. A principal
use of Sun seekers is to orient the vehicle relative
to the Sun for thermal control.
Radio Navigational Aids. For Spacecraft required to return
safely to Earth and land (e.g., the NASA Space
Shuttle Orbiter) or land on other bodies, one or more radio
navigational aids may be required. The simplest of
these is the radar altimeter, which allows the spacecraft to
measure altitude autonomously above the surface of
the landing zone. In the Space Shuttle Orbiter, the radar
altimeter measures altitude from about 5000 ft down to
touchdown.
Tactical Air Navigation (TACAN) units are used on the Space
Shuttle Or-biter to determine the slant range and
magnetic bearing of the Orbiter during landing approach. This is
not an autonomous capability, and several
precisely located active ground stations are required. The
maximum range of TACAN is about 400 nautical
miles. The Orbiter acquires bearings at a range of about 300
nautical miles and 160,000 ft altitude after entry
blackout. TACAN data can be used down to an altitude of about
1500 ft.
For final approach, the Orbiter uses the Microwave Scanning Beam
Landing System (MSBLS). This system
requires active ground stations located immediately adjacent to
the runway. The Orbiter acquires the MSBLS
signal at a range of 8 to 12 nautical miles and at an altitude
of approximately 18,000 feet. The Orbiter
Commander usually takes over manually over the runway threshold
at about 100 feet altitude.
Information on the NASA Space Shuttle is taken from Ref. 12.
Control
A number of functions must be performed during spacecraft flight
that fall under the
general heading of control:
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
13/25
During navigational observations, the spacecraft must be aligned
relative to an inertially fixed axis system
and the attitude stabilized within a very narrow angular dead
band. This is sometimes called the attitude hold
mode.
During periods of thrusting, the spacecraft must be pointed in
the correct direction, and the thrust vector
controlled. This is usually called the delta V mode.
Spacecraft attitude hold relative to the Sun may be required, or
perhaps the vehicle is slowly rolled
(so-called barbeque mode) for thermal control.
Attitude control may be required in conjunction with the
deployment of certain mechanisms such as solar
panels, radiators, docking mechanisms, and manipulator arms.
If the spacecraft is to land on Earth or on one of the planets
that has an atmosphere, control during
atmospheric entry may be required and may necessitate blending
of attitude control rockets and aerosurfaces.
Landing control is likely to be required and may include control
of aerosurfaces, speed brakes, parasails, drag
parachutes, landing gear, wheel brakes, and steering on the
ground.
* Effector command signals must be processed (scaled, mixed,
prioritized, time-delayed) and routed.
Depending on the GN&C system design, attitude change
commands may come from the flight computer,
directly from the flight crew, or from the ground via radio
links. Attitude stabilization commands may come
from body-mounted gyros that are generally less accurate than
those used for inertial guidance but may serve as
emergency backups for the IMU. A newer technique for stabilizing
spacecraft in Earth orbit uses differential
Global Positioning System (GPS)-de-rived position data from
multiple receivers located remotely from eachother on the
spacecraft. It has been found that attitude knowledge of the order
of 0.05 is possible (15).
Body-mounted accelerometers may be used for docking sensing or
aerodynamic drag sensing during entry.
Effectors. Devices that produce intentional reactive forces on
the spacecraft are termed
effectors and may include any of the following:
* Attitude control thrusters that use cold gases or reactive
chemicals as pro-pellants. These may also be used for
small translations for such maneuvers as docking.
* Major engines that produce large changes in the velocity of
the spacecraft {delta V). Both thrust level and
direction {thrust vector control) may be controlled.* Reaction
wheels where the wheel rotational rate is accelerated or
decelerated to achieve reactive torquing of
the spacecraft and a corresponding change in attitude.
* Control moment gyros that are typically mechanical gyros
torqued electrically so that the resulting precession
produces a desired change in spacecraft attitude.
* Aerodynamic surfaces and drag devices.
* Tethers that produce electromagnetic thrusting.
Usually the effectors themselves are not considered part of the
GN&C system, but their control electronics are.
Analysis of the effects on vehicle motion is usually considered
a GN&C responsibility. A simplified generalized
block diagram of control function is shown in Fig. 10.
Environmental Disturbances. There are several disturbances that
can cause a variation in attitude and possibly
tumbling or wobbling. These are usually more noticeable during
quiescent periods when the spacecraft is
allowed to drift:
* Gravity gradient effects, usually significant when orbiting or
flying near a large body.
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
14/25
Figure 10. Control block diagram.
* Aerodynamic drag and moments when flying near a body having an
atmosphere.
* Solar radiation pressure, usually significant when the
spacecraft configuration includes large planar surfaces,
such as solar cell panels.
* Electromagnetic induction when flying through the magnetic
field of a large body.
The effects of these disturbances are difficult to calculate
accurately but may be estimated using the
methods of Refs. 19 and 20.1 At the appropriate time, when a
fixed attitude is required, these must be
counteracted by the attitude control system. Often a small
angular dead band is desired and is maintained by use
of the reaction wheels, control moment gyros, or attitude
control thrusters. In the last case, thruster propellant
usage is always a consideration and sometimes leads to
sophisticated electronic logic for duty cycle
optimization.
Reference Axis System. Since effectors and some sensors are
mounted rigidly to the spacecraft structure, it is
customary for control analysis to use an axis system originating
at the center of mass of the spacecraft. This is
depicted in Fig. 11. Symbols are defined in Table 1, followed by
a sign convention in Table 2. Equations of
Motion. Development of the equations of motion for all mission
phases of a spacecraft is an arduous task and
beyond the scope of this article. The usual approach to
analyzing a particular phase is to make certain
simplifying assumptions to reduce the number of mathematical
terms significant in that phase. Later on, after
achieving a basic understanding of the dynamics, correcting
terms may be added for evaluation.
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
15/25
Figure 11. Control reference system.
For example, shown below are six-degree-of-freedom equations of
moti for the coasting (in space) attitude hold
mode. Simplifying assumptions are follows:
The spacecraft is considered a rigid body.
Vehicle mass and inertia remain constant during the period of
interest.
Table 1. Body Axes Coordinate System
Table 2. Sign Convention
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
16/25
The spacecraft is symmetrical about the x-z plane, causing the
products of inertia Jyz and Jxy to drop out.
* Terms involving the products of inertia, pJxz and rJxz, are
small and may be ignored.
It is helpful to write the equations in this form to get an
understanding of the importance of the different terms.
Numerical solution on digital computers is usually more
convenient after conversion to matrix form. For further
discussion on this subject, see Refs. 13, 21-23.
The Flight Computer
There is no part of GN&C technology that has evolved during
the past 50 years as dramatically as the
onboard digital flight computer. It started in the early 1950s
as a fire control computer 4 cubic feet in volume
with 250 vacuum tubes (24). Then came the addition of the
onboard navigation function with transistor-transistor logic (TTL).
Then its use was expanded to include guidance where steering
signals were injected into
an analog flight control system. By the time of the
second-generation Apollo spacecraft, the flight control
function was added, integrated electronic circuits were
implemented, and the first automatic fly-by-wire flight
control was realized. With the Space Shuttle came computer
control of all GN&C functions for both atmospheric
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
17/25
and spaceflight, computer-driven cockpit displays and computer
processing of all manual flight control inputs,
and the beginnings of distributed processing. Current flight
computers are on the order of cubic inches in volume
or smaller, use relatively modest amounts of electrical power,
and compute at rates incomprehensible only a few
years ago. Microminiaturization is being realized in current
applications, and the application of nanotechnology
seems likely within a few years.
Todays flight computer performs an impressive array of
functions, depending on the
mission of the spacecraft:
* Guidance sensor management and data processing, guidance
algorithm computation, and steering signal
generation.
* Navigation sensor management and data processing; course
evaluation, correction, and forecasting; and
trajectory calculation.
* Flight control sensor management and data processing, vehicle
attitude control, command mixing and
prioritization, effector selection, thrust vector control,
attitude thruster control, aerosurface control, vehicle
bending and longitudinal oscillation control.
* Aerobraking control, parachute and parasail deployment and
steering, nose wheel steering, and wheel
braking.
* Systems management for non-GN&C systems, such as
electrical power generation, distribution and control;
radio/radar/television communications; exploratory payload
sensor management and data processing;
environmental control systems; and hydraulic and pneumatic
systems.
* Consumables accounting and management.
* Flight instrumentation control, data processing, and downlink
control.
* Generation of cockpit displays and processing of manual
commands for flight control.
* Accommodation of ground commands via radio for software
updates, GN&C commands, and data
downlinking.
* Redundancy management.
* Vehicle health management (an extension of onboard
checkout).
* Multiplex data bus management.* Distributed processing
management.
Input/Output. Probably the most difficult problem in
implementing flight computers is communication between
the computer and the various devices that are commanded or
generate data. The magnitude of this problem can
be appreciated intuitively if one imagines the number of wire
bundles and connectors required to link the devices
to the computer. The problem is compounded if there are
redundant computers linked to one another that share
the same information. Also, put simply, the digital flight
computer is an anomaly in the middle of an analog
world, and the necessary conversion of signals from
analog-to-digital (A/D) and digital-to-analog (D/A), plus
attendant voltage scaling and device scale factor and bias
accommodation, is a significant task.
The computer communications problem has been solved successfully
in various ways:
Separating the input/output function and the computation
function into two boxes called the input-output
processor (IOP) and the central processor unit (CPU). In this
approach, the IOP handles the A/D and D/A
conversions, voltage scaling, temporary data storage, data bus
management (if required), and other functions.
Doing the A/D and D/A conversion, scale factor adjustment, and
voltage scaling at the devices served. In
some cases, small local processors are implemented in the
devices to perform these relatively simple chores, so
that messages to and from the main flight computer are reduced
to significant flight data. (This is the beginning
of distributed processing.)
Implementing a multiplex data bus distribution system for
communicating with the various devices. In
this approach, various devices that have unique addresses are
connected to a data bus managed by the IOP. An
important advantage of this approach is weight reduction in
wiring. Sharing the computation task among several processors on
the spacecraft. It could be argued that this
distributed processing approach is more of a fundamental change
in the approach to hardware and software than
just a solution to the I/O problem. Certainly, it significantly
affects the total software design, implementation,
and verification/validation approach. In addition, it usually
reflects not just a GN&C decision, but total
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
18/25
spacecraft system engineering methodology.
Real-Time Operation. The requirement of uppermost importance for
flight computers doing GN&C
computations is the ability to keep up with the dynamics of the
vehicle and the sensors that provide input data.
Whereas batch processing computers in typical ground settings
simply run longer when necessary to complete a
job, such a delay can be deadly in flight computers in the loop
of highly dynamic flight scenarios. The flight
computer must maintain system stability, provide computational
precision, service sensors, accept interrupts,
cope with failures, and even monitor itself while running on
control software cycle times typically of 40
milliseconds. The computation bandwidth is almost impossible to
estimate accurately early in the design phase
of a program, and even the most generous growth margins are
usually exceeded and call for compromises to be
accommodated later on in the flight software.
A key characteristic of the computer loading is the iterative
nature of many calculations, particularly in
navigation. There will be errors from a number of sources,
including navigation sensor measurements and
system mechanization.
A technique for handling these errors is the Kalman filter
(25,26), a stochastic analysis and estimation
process used extensively in space, aircraft, and missile
computers since the early 1960s. Beginning with a priori
knowledge of system errors, the Kalman filter continually
performs a statistical error analysis and predicts new
values for system variables. The resulting product is continuing
improvement in position determination.
Flight Software. In the early days of general-purpose digital
computers, and especially in digital flight
computers, computation times were extremely slow by todays
standards, and random access memory (RAM)was bulky and expensive.
The typical computer programmer was a mathematician who likely had
a keen
appreciation of the overall computation objectives and was
driven to code austere programs in what was termed
machine language in those days but called assembly language
today. Major disadvantages in that software
coding approach were that it was labor-intensive and only the
original programmer understood the logic behind
his organization of the computer program. If other programmers
were brought in to modify the program, there
was usually some unproductive period to learn the code already
in existence. The major advantage was that the
assembly code was understandable, at least to the original
programmer, and was easily modified. The GN&C
engineer often simply had only to speak in general terms to the
programmer to have a change incorporated in a
timely manner.
Since those early days, three things have happened to cause a
revolution in the way flight software is produced
today: computation rates have increased by orders of magnitude,
random access memory has become
inexpensive, and higher order languages (HOL) have become
predominant in the development of software
programs. Now, software engineers and programmers are formally
educated in information systems technology
rather than mathematics. The use of higher order languages such
as FORTRAN, C, C ++, Ada, and HAL/S
makes the flight software engineer and programmer very
productive in terms of assembly code generated. And
once software engineers or programmers learn the rules and
methods for a particular HOL, they can become
productive immediately without knowing very much about the big
picture of the flight program.
This evolution in computer hardware and software production is
not without drawbacks. The very
universality of a typical HOL that makes it attractive to modern
diverse users also produces very inefficient
assembly code. Traditionalists cringe at the squandering of RAM,
and even today there never seems to be
enough RAM as a spacecraft program progresses. Then, there is
the assembly code itselfoften virtuallyindecipherable and difficult
to change if relatively simple modifications (called patches) are
necessary. The
alternative is to make the changes in the source code in the HOL
and recompile, a time-consuming process and
so prone to introducing undesirable effects that lengthy
reverification is usually required. An unfortunate result
of this modern approach is that the GN&C engineer usually
does not have a thorough knowledge of the flight
software program and has difficulty developing an intuitive feel
for the program. He must rely almost
exclusively on the formal verification/validation of the program
for confidence.
Another characteristic of the modern GN&C flight software
program is that it seems to grow like Topsy
as the spacecraft design matures. This is an unfortunate product
of an evangelistic-like effort in the early days of
spaceflight, and still today, by enthusiasts to sell the digital
flight computer by welcoming more and more
functions into the software program as a cheap way of
implementation. Software accommodation of a feature
may appear initially to be a simple and seemingly inexpensive
thing to do, but often the penalties in time and
expense for the subsequent verification/validation are not
anticipated. A vigorous GN&C system engineering
program is probably the best solution for this quandary.
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
19/25
The cost of flight computer software is likely to be the most
significant item in the GN&C
budget and may exceed the cost of the rest of the GN&C
system. There are several
important factors involved in containing this cost:
It is critical to document software requirements in as much
detail as possible or the computer may be
undersized, or the software cost driven to astronomical levels
by changes later on, or both.
The HOL must be chosen carefully while balancing its
suitability, maturity, and compilation time with the
availability of software engineers and programmers familiar with
it. The executive program (operating system) must be carefully
planned for real-time operation with the
attendant issues discussed earlier.
Application software must be compatible with the devices
commanded, and the software engineer-to-device
engineer interaction is expensive and sometimes difficult to
orchestrate.
All software must be designed recognizing the time, manpower,
and equipment costs associated with the
verification process.
Configuration management is an absolute must for the duration of
the spacecraft project.
The verification and validation approach must be selected. For
verification, will flight computers or
computer emulators be used? For validation, will a flight
computer plus simple simulator be used, or will an
iron bird or high-fidelity avionics integration facility plus
high-fidelity simulator be used? And will
performance of the verification/validation be done (or repeated)
by an independent organization (so-called
independent verification and validation or IV&V)?
Current Trends. Flight computers continue to grow in
capabilityfaster computational speeds and greater
RAMand are becoming smaller, less power hungry, and cheaper.
Choices that were significant a few years ago
are not issues anymore. For example, fixed-point versus
floating-point arithmetic is now typically decided in
favor of floating-point even though floating-point takes more
computing time. Word length is now typically 32
bits, and 16-bit machines are passing from the scene. Lasers are
being used for communication within the
computer in place of copper wire. More and more devices in the
GN&C system have embedded digital
processors that take care of much of the computer overhead, thus
off-loading the central flight computer. Other
advancements are discussed under Integrated GN&C
following.
Integrated GN&C
Modern spacecraft GN&C systems have their roots in the
automatic pilots {autopilots) developed for
aircraft in the middle of the last century to relieve pilots on
long flights. Rapid advances were made in the 1930s
and 1940s, inspired largely by World War II. Initial, relatively
crude, vacuum-driven gyros plus vacuum control
valves plus hydraulic actuators gave way to electrical sensors
plus electronic (vacuum tube) signal processing
plus electrical actuators. Throughout this period, the guidance
and navigation functions were typically performed
by the flight crew and manual commands could be issued to the
aircraft directly or via the autopilot control
system. Autopilots were the means used to control bombers with
steering commands coming from the famous
Norden bombsight. Conceptually, then, the guidance and
navigation functions were an overlay to the autopilotcontrol
system.
During the 1950s to early 1960s when onboard digital flight
computers came on the scene to perform the
G&N functions this overlay approach was followed. Flight
computers provided steering commands to the
vehicle via the analog control system in much the way aircraft
crews had done in the past. The analog control
system continued to provide three-axis stability and processed
the computer-generated steering commands. This
design approach was typical of aircraft and guided missiles of
the period, and it was followed on the NASA
Gemini spacecraft and the early NASA Block I Apollo spacecraft.
It is interesting to note that toward the end of
this period when manned spacecraft came on the scene mechanical
control linkage gave way to electrical
communications between the astronaut and effectors and the
expression fly-by-wire originated.
In the mid-1960s, as flight computers became more powerful and
compact, the entire GN&C calculation
function was assigned to them, and analog channels were retained
as backup. Outputs were then made directly to
the driver amplifiers of the analog control system to command
the attitude control thrusters and large engines for
changes in translational velocity and thrust vector control
during thrusting. This integrated GN&C System
became the standard design approach used in guided missiles,
satellites, the NASA Apollo lunar mission
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
20/25
spacecraft, the NASA Space Shuttle, and is followed today in the
International Space Station. This evolution is
shown in Fig. 12.
The integrated approach has several advantages. Since the flight
computer performs all the GN&C
calculations, the computer program (flight software) development
can be managed more easily. Flight
software design changes can be controlled and implemented with
less chance of error. System internal
redundancy, if desired, can be implemented more efficiently.
Overall GN&C electrical power usage is less. Total
system volume and mass are reduced.
This is not to say that the integrated GN&C System is
necessarily less complex. Likely, it is not. Computer
programs become larger, harder for nondeveloper users to
understand, and almost impossible to test completely.
Training of flight crew and ground support personnel is usually
more tedious and lengthy. Preflight testing of the
integrated system becomes more involved and expensive because of
the fidelity required.
Nonetheless, the integrated GN&C System provides the
capability of performing more complex missions and is
more flexible for design changes needed for corrections,
evolutionary development, and last minute mission
changes.
Figure 12. Evolution of the autopilot.
Digital Data Buses. A major advancement in the design of the
NASA Space Shuttle was the use of multiplex
serial digital data buses for communication with the flight
computer. This approach helped solve the computer
input/ output loading problem and also provided substantial
weight saving. Some 28 data buses are used in the
Shuttle design. The data bus is, physically, a twisted shielded
pair of wires with transformer couplers for bus
protection at each electronic user box. The computer uses
command and data words that have unique
addresses for each receiver so that although all boxes on the
bus hear all communications, each responds only to
words that have its address. Multiplexers/Demultiplexers convert
and format serial digital commands into
separate parallel discrete, digital, and analog commands for the
various systems served (demultiplexing) and do
the reverse for data collected and sent back to the computer
(multiplexing). The USAF continued this
development, and multiplexed data buses are now common on
aircraft, spacecraft, and missiles (27).
An approach similar to the copper data bus discussed before is
the fiberoptic bus (28). Fiber has the advantages
of potentially higher data rates and less susceptibility to
electromagnetic interference or intentional jamming.
Disadvantages include larger minimum bend radius for
installation and the potential to become unserviceable
due to age or environmental effects.Fiber optics is also
considered part of a general class of communications called
photonics. This is a term
used for the general case in which the medium is light rather
than electron flow. In GN&C, the expression
fly-by-light is sometimes used. When direct line of sight exists
between devices, the use of laser beams or
infrared beams for data transfer is possible.
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
21/25
Fly-by-Wireless?. A promising development that could be used in
lieu of the data bus is digital spread-spectrum
radio frequency communication between the flight computer and
devices in the GN&C system. Spread-spectrum
is a technique used to reduce or avoid interference by taking
advantage of a statistical means to send a signal
between two points using different frequencies at different
times. The theory is that noise tends to occur at
different frequencies at different times. Therefore, even though
part of a transmission might be lost due to
interference, enough of the message will come through to create
noticeably better output compared to fixed-
frequency systems. Further, using error correction techniques,
the original message can be totally restored. The
promise of this approach for aircraft and spacecraft is
reduction in size, weight, and power of GN&C systems
while offering immunity to natural interference or jamming from
man-made equipment.
INVOCON, based in Conroe, Texas, has had considerable success in
developing instrumentation for the
NASA Space Shuttle Orbiter and the International Space Station
by linking sensors to a central
controller/transponder via spread-spectrum radio. Using the same
principle on a project sponsored by NASA
Dry-den Flight Research Center, INVOCON successfully replaced a
data bus link from the flight computer to an
elevon actuator on a NASA F-18 research airplane (29). This
concept is shown in Fig. 13.
Redundancy. The use of backup hardware in aircraft and
spacecraft to allow operation in the event offailure
dates back many years. In manned vehicles, the crew normally has
had the capability to choose the backup,
usually degraded in performance, but may have been incapable of
making the decision in dynamic situations.
The NASA Space Shuttle, which had a design requirement to remain
fully operational with one failure and to
remain safe after two failures, probably reached the maximum in
complexity in the approach to automatic andmanual redundancy
management. Basic to the design approach is the provision of four
redundant primary flight
computers to handle two computer hardware failures automatically
and a fifth identical backup flight computer
loaded with dissimilar software to be chosen in a manual
switchover in case of a generic software error in the
primary set. Three or more redundant channels of sensors are
shared by all computers, which then command
four parallel redundant channels to the effector
servoelectronics. The primary flight computers automatically
compare and vote by majority rule. In addition, the aerosurface
actuators, which have four channels at the
secondary (pilot spool) stage, were designed to vote effectively
by force fight, that is, three channels overcome
the offending fourth channel by force summing three against one.
A comprehensive discussion of these features
can be found in Ref. 30.
Figure 13. Fly-by-wireless concept.
The requirement of redundancy and automatic redundancy
management in spacecraft depends on the need for
vehicle survivability weighed against the cost of redundancy
implementation. For expendable vehicles, it may be
cheaper simply to build more spacecraft than to make them
internally redundant. In manned spacecraft, loss of
life is so intolerable in this country that safety must be
maintained, regardless of cost.
Simulation
The sheer quantity of black boxes in a modern day GN&C
system begs the question as to whether
system end-to-end mathematical analysis is possible. Further,
the time-varying, cascading signal flow from the
multiple sensors to the flight computer to the various driver
electronics for the motion effectors makes
end-to-end analysis and solutions by conventional closed form
methods virtually unachievable. Moreover, if the
solution were tractable for a particular time and set of
physical conditions and produced acceptable results from
an operational point of view, the flight conditions could change
in the next few moments, and the analysis would
have to be repeated. The analytical approach commonly used in
these situations is known as computer
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
22/25
simulation, or simply simulation, where time is the primary
independent variable.
Simulations are used in the conceptual design phase of a program
and grow in complexity and fidelity as
the program matures. Mathematical models of the functions of the
different pieces of hardware evolve in
complexity from simple first-order equations to higher and
higher levels of fidelity. Desktop computers are
adequate in the early phases to define and analyze single
sensors, signal amplifiers, effectors, and units as
complex as inertial platforms. As the program progresses,
multiple hardware units are combined, vehicle
characteristics and operational environments become better known
in more detail, and the simulations are forced
to move to larger complexes of computers, data library devices,
and resultant data readout devices.
Additional complexity accompanies increased fidelity when the
simulation is required to operate in a
real-time mode. Real time means that a series of events
simulated is calculated on the simulator in the same
period of time as the real events would occur. Real-time
simulation is used any time there is flight crew
involvement or flight-like hardware is substituted for simulated
hardware. For GN&C system-level simulations,
the flight computer is usually one of the earliest units
substituted for its modeled counterpart.
If the flight vehicle is a manned spacecraft, a crew station
(cockpit) is usually added. Active crew displays and
controls, either flight-like or simulated, are added to allow
realistic crew participation for evaluating the GN&C
system. If visual cues are required for this crew participation,
out-the-window scenes may be included. The
NASA Johnson Space Center Engineering Simulator that has some
two million lines of computer code is an
example of these large man-in-the-loop simulations.
As the program matures, a simulator especially designed for
flight crew and ground operations personneltraining is usually
constructed. This simulator-trainer typically has the highest
fidelity of all simulations in the
program. All onboard displays and controls are included, and
system simulated failures may be introduced to
enhance training. For manned spacecraft, out-the-window scenes
are included for all phases of the intended
vehicle mission, including prelaunch, launch, orbit transfers,
midcourse deltaVs, rendezvous and docking with
another spacecraft, deorbit, and landing.
Vital to the fidelity of simulations throughout a program are
valid mathematical models for the
components of the GN&C system, for effectors and other
non-GN&C equipment, and for the environment in
which the vehicle is supposed to be operating. Simple
first-order equations are quite satisfactory early in the
design phase, but as actual hardware is built, the fidelity
desired increases, and the corresponding mathematical
models become more complex. Similarly, equations of motion,
environmental models for ambient physical
conditions, aerodynamic data, ephemerides, and out-the-window
scenes all become more intricate in the drive
for fidelity as the program progresses and the design matures.
This often results in large simulation complexes
that are expensive to create and maintain, but they are
indispensable for system development, anomaly
investigations, and crew training.
Integration and Verification
The term integration is an overworked word in the aerospace
business, but it is quite descriptive in GN&C
systems development. Hardware piece parts and modules are
integrated (assembled) into line replaceable units
(LRUs) or black boxes2 that are replaceable as the first level
of maintenance on spacecraft. The LRUs are then
integrated (combined) to form the whole GN&C system. A
similar process is followed in developing flight
computer software. As this process is followed, engineering
tests are conducted, and design errors are uncovered
and corrected. This successive integration is part of the
development process and is the most demanding part of
GN&C engineering.
Verification is the process of formal evaluation of the hardware
and software and is done somewhat in parallel
with the integration process. Four methods are generally used
and are listed here in order of preference: test,
inspection, demonstration, and analysis. These are defined as
follows:
Testthe stimulation of the hardware and software under
prescribed conditions and the responses measured and
evaluated against specifications.
Inspectionthe visual examination of hardware, usually in static
situations.
Demonstrationoperation in a test-like environment but where
responses usually cannot be measured andperformance must be
evaluated subjectively.
Analysismathematical and logical evaluation using mathematical
models, drawings, flow charts, and
photographs.
Formal hardware verification testing begins with the acceptance
test at the GN&C system vendors plant. This
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
23/25
test is conducted before the buyer accepts delivery to ensure
that the equipment is functioning in accordance
with the requirements of the contract between the vendor and the
buyer.
Ideally, one or more LRUs are randomly selected from those
already accepted for a subsequent qualification
test. The qualification test is conducted at extremes in ambient
conditions [pressure, temperature, vibration,
input electrical power, electromagnetic interference (EMI),
etc.] beyond the limits expected in normal operation.
This test ensures that the hardware has comfortable operating
margins.
The next level of testing is the integrated system test. In this
test, the entire GN&C system is assembled in a
flight-like configuration, and stimuli at the sensors are
processed through the system to the outputs of the
effector driver electronics. This is also sometimes called a
system end-to-end test. Debate continues as to
whether this test is an engineering development test or a formal
verification test, but in reality it is usually both.
Certainly, any design errors or generic manufacturing errors
that are uncovered must be corrected. A critical part
of this exercise is the testing of interfaces with non-GN&C
equipment. The importance of this aspect is
discussed in Ref. 31.
The final ground verification test is the mission verification
test. The significant addition to the integrated
system test configuration is a real-time simulation computer
complex. This is used to close the loop (i.e., close
the flight control loop using simulated vehicle dynamics) and to
model missing flight hardware and the vehicle
flight environment so that the entire mission, or significant
portions, may be flown as realistically as practical
short of actual flight. Flight computer software is used in the
flight computer and is validated in the process.
Successful completion of the mission verification test allows
certification for flight. This sequence is shownpictorially in Fig.
14.
Figure 14. Integration and verification sequence.
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
24/25
Figure 15. Shuttle Avionics Integration Laboratory
One of the most sophisticated facilities for the integrated
system test and the mission verification test is the
Shuttle Avionics Integration Laboratory at the NASA Johnson
Space Center. An artists rendering of the facility
is shown in Fig. 15. The avionics are installed in a
high-fidelity, three-dimensional full-scale arrangement with
flight-like vehicle wire harnesses. The outline of the Orbiter
is shown in dashed lines for orientation.For manned spacecraft, one
or more flight tests are usually required before the vehicle,
including the GN&C
system, is certified for normal operational use.
Next post: SPACELAB
Previous post: SPACE SHUTTLE ORBITER
0
Related Topics
Space Science and Technology
ASTRONAUTS AND THE PEOPLE WHO SELECTED THEM: A COMPENDIUM
EXPLORATION OF MARS BY THE USSR
APOLLO 17 AND THE MOON
EARTH ORBITING SATELLITE THEORYEARTH-ORBITING SATELLITES, DATA
RECEIVING AND HANDLING FACILITIES
:: Search WWH ::
Ads by Google
Navigation Systems
It Systems
Ads by Google
Motion Control Systems
Vehicle Systems
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...
di 25 05/01/2013 16:57
-
7/28/2019 Spacecraft Guidance, Navigation and Control
Systems
25/25
Custom Search
Help Unprivileged Children Careers Privacy Statement Copyright
Information
CECRAFT GUIDANCE, NAVIGATION AND CONTROL SY...
http://what-when-how.com/space-science-and-technology/spacecraft-g...