Embed Size (px)
Citation preview
Modul 10 Informationstechnologie und EDV-gestützte Planungsmethoden
Space Syntax Zugänglichkeitsanalyse Endbericht
Bernd Hildebrandt [0325833]
Daniel Latzer [0331158]
Martin Schrön [0527024]
Peter Schwaighofer [0501604]
WS 2011 / 2012 VU 268.047 Stadtraumbezogene Simulation
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 2
Inhaltsverzeichnis 1. Einleitung .............................................................................................................................. 3
2. Erhebungsergebnisse .......................................................................................................... 4
3. Space Syntax Integration Analyse ....................................................................................... 8
3.1 Ist-Zustand ..................................................................................................................... 9
3.2 „Szenario Fünf“ ............................................................................................................. 10
3.3 Vergleich Ist-Zustand / „Szenario Fünf“ ....................................................................... 13
4. Space Syntax Visibility Graph Analyse ............................................................................... 14
4.1 „Szenario Fünf“ ............................................................................................................. 14
4.2 „Szenario Fünf“ | Variation 1 ......................................................................................... 15
4.3 „Szenario Fünf“ | Variation 2 ......................................................................................... 15
4.4 Reflexion des „Szenario Fünf“ und Nutzungsempfehlung ........................................... 16
5. Dreidimensionale Darstellung ............................................................................................ 18
6. Zusammenfassung ............................................................................................................. 19
6.1 Reflexion über die Space Syntax Methode .................................................................. 19
6.2 Resümee zur Lehrveranstaltung ................................................................................... 19
Verzeichnisse ......................................................................................................................... 20
Abbildungsverzeichnis ........................................................................................................ 20
Quellen ................................................................................................................................ 20
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 3
1. Einleitung Die Lehrveranstaltung Stadtraumbezogene Simulation ist Bestandteil des Modul 10 „In-formationstechnologie und EDV-gestützte Planungsmethoden“ des Masterstudiums Raum-planung und Raumordnung. Inhaltlich geht es bei der Veranstaltung darum, raumbezogene Simulationstechniken und die dafür zu Grunde liegenden Modelle kennen zu lernen.
Anhand einer Zugänglichkeitsanalyse im Space Syntax (Axial Maps) sowie einer Visibility Graph Analysis (VGA) eines bestehenden Planungsvorschlages für ein Stadtteilentwick-lungsgebiet werden Erfahrungen im Umgang mit digitalen Simulationsmöglichkeiten ge-sammelt.
Um die Ergebnisse der Computeranalysen richtig interpretieren zu können, sind diesen eine Begehung des zu entwickelnden Stadtteiles vorausgegangen.
Der vorliegende Bericht ist eine Dokumentation der verschiedenen Arbeitsphasen der Lehr-veranstaltung mit anschließender kritischer Diskussion der erlernten Techniken und Soft-wareanwendung. Auf die Methodik der Erstellung der Analysegrundlagen (i.e. der „Achsiali-sierung“ des Gebietes nördlich der Donau) wird in diesem Report keine Rechnung getragen, da davon ausgegangen wird, dass der/die LeserIn damit bereits vertraut ist. Selbiges gilt auch für die in Depthmap (Software zur Durchführung der Analysen) unterliegenden Algo-rithmen und Berechnungsvorschriften.
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 4
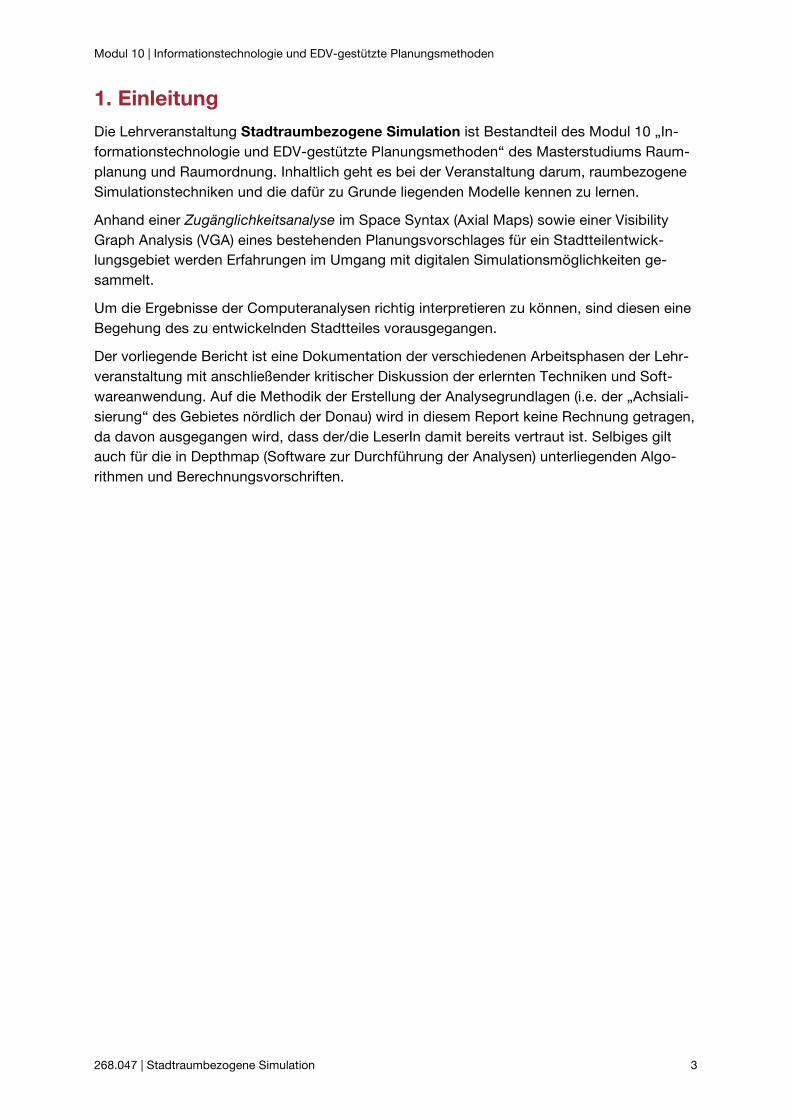
2. Erhebungsergebnisse Wie eingangs schon erwähnt geht der späteren Bearbeitung des Untersuchungsgebietes eine Begehung vor Ort voraus. Dabei werden vor allem Sichtachsen bestehender Straßen-abschnitte genauer betrachtet, welche im nächsten Schritt (siehe Punkt 3) von Bedeutung sind.
Abbildung 1: Übersicht über das Untersuchungsgebiet mit Fotostandorten
Obige Abbildung zeigt das untersuchte Gebiet mit den nummerierten Fotostandorten:
1) Hausfeldstraße
2) Quadenstraße
3) Grete-Zimmer-Gasse
4) Karl-Bedranik-Gasse
5) Ziegelhofstraße
6) Lackenjöchelgasse
7) Am Heidjöchl
1
5 4
2
3
7
6
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 5
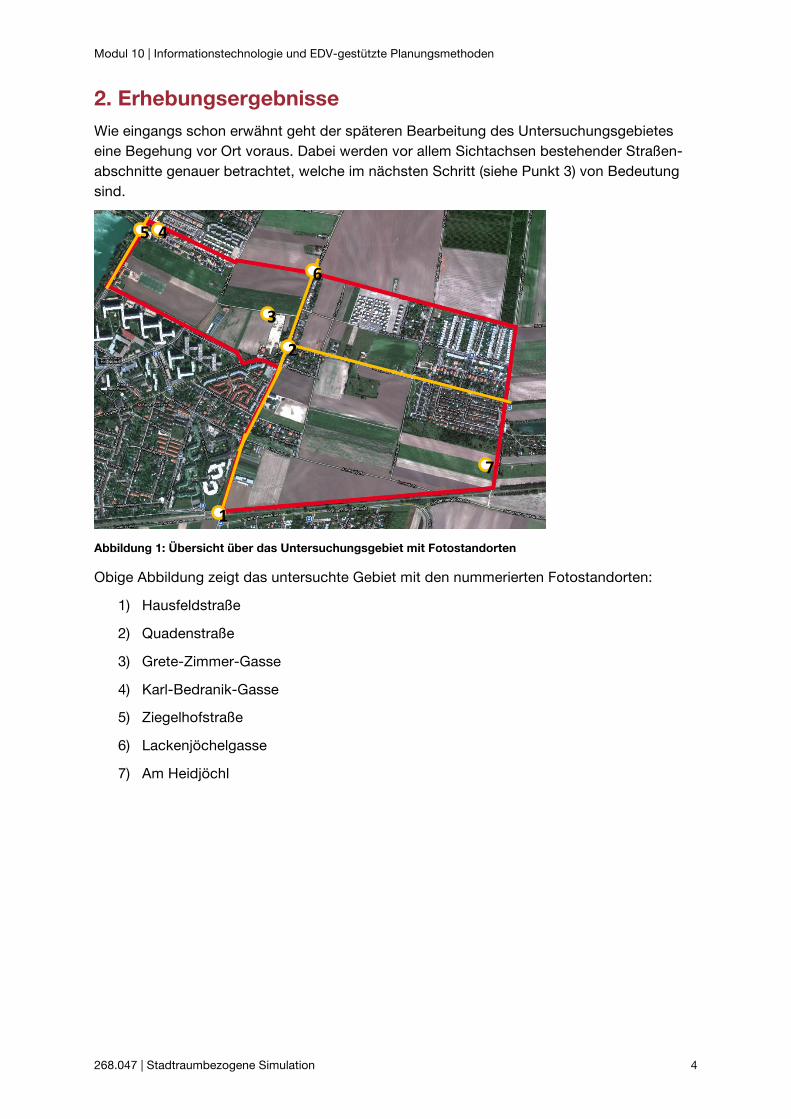
Hausfeldstraße Unterführung
durchbrochene Sichtachse
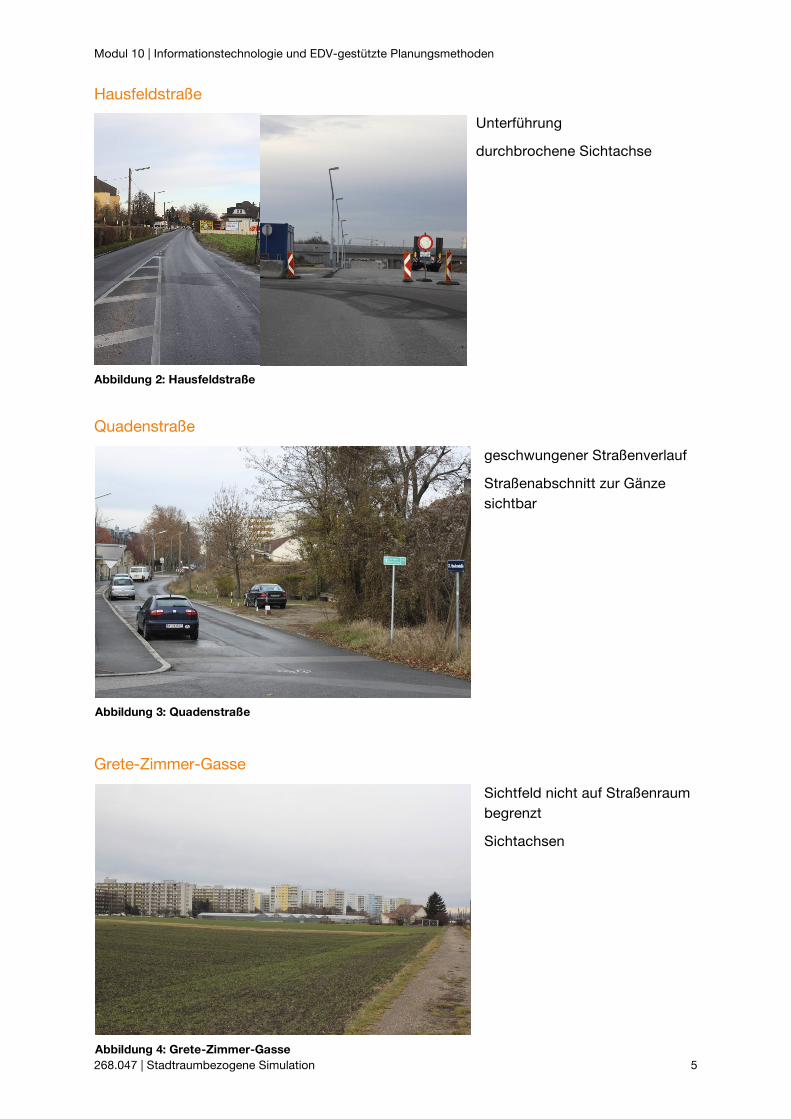
Quadenstraße
geschwungener Straßenverlauf
Straßenabschnitt zur Gänze sichtbar
Grete-Zimmer-Gasse Sichtfeld nicht auf Straßenraum begrenzt
Sichtachsen
Abbildung 3: Quadenstraße
Abbildung 4: Grete-Zimmer-Gasse
Abbildung 2: Hausfeldstraße
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 6
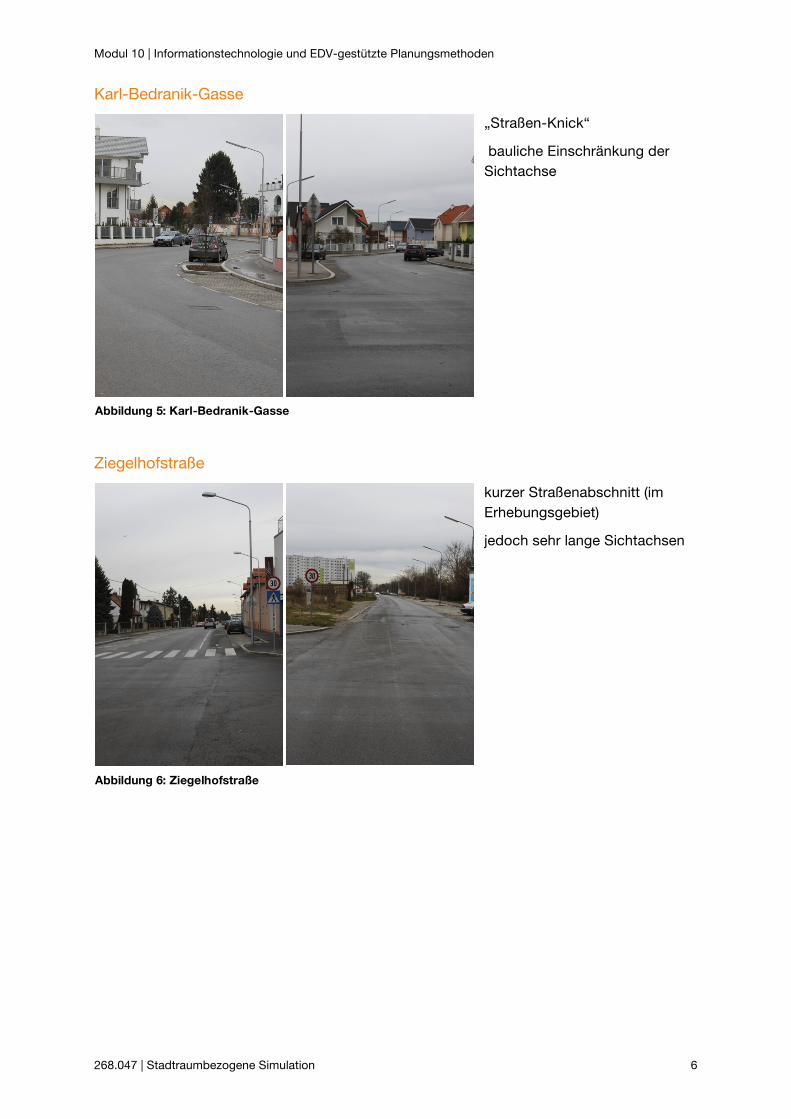
Karl-Bedranik-Gasse
„Straßen-Knick“
bauliche Einschränkung der Sichtachse
Ziegelhofstraße
kurzer Straßenabschnitt (im Erhebungsgebiet)
jedoch sehr lange Sichtachsen
Abbildung 5: Karl-Bedranik-Gasse
Abbildung 6: Ziegelhofstraße
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 7
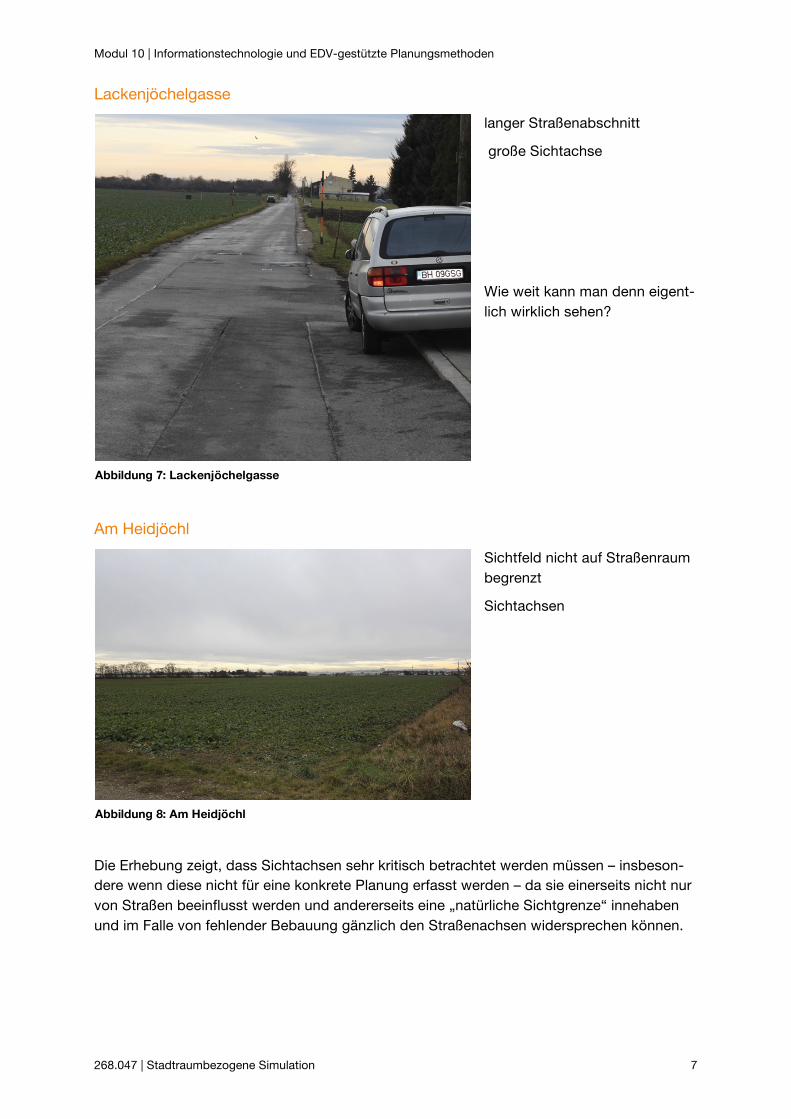
Lackenjöchelgasse
langer Straßenabschnitt
große Sichtachse
Wie weit kann man denn eigent-lich wirklich sehen?
Am Heidjöchl Sichtfeld nicht auf Straßenraum begrenzt
Sichtachsen
Die Erhebung zeigt, dass Sichtachsen sehr kritisch betrachtet werden müssen – insbeson-dere wenn diese nicht für eine konkrete Planung erfasst werden – da sie einerseits nicht nur von Straßen beeinflusst werden und andererseits eine „natürliche Sichtgrenze“ innehaben und im Falle von fehlender Bebauung gänzlich den Straßenachsen widersprechen können.
Abbildung 7: Lackenjöchelgasse
Abbildung 8: Am Heidjöchl

Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 8
3. Space Syntax Integration Analyse Die Space Syntax integration analysis (zu Deutsch etwa Zugänglichkeitsanalyse) misst die Anzahl an Straßenabschnittsänderungen die eine Person tätigen müsste, um von einem Straßenabschnitt in alle anderen Straßenteile eines Netzwerkes zu gelangen, unter Berück-sichtigung des kürzesten Weges. Jene Straßensegmente, von denen am wenigsten turns benötigt werden um in alle anderen Straßenabschnitte zu gelangen, sind somit am zugäng-lichsten (most integrated). Man spricht hier auch von einer globalen Zugänglichkeit, bei der alle Elemente miteinander in Beziehung gebracht werden (Radius = N).
Darüber hinaus besteht die Möglichkeit eine lokale Zugänglichkeit zu analysieren, in dem für jedes Straßenelement nur jene anderen Elemente in Beziehung gesetzt werden, die in einem bestimmten Abstand (Radius = z.B. 800m) liegen, oder auch in einer Maximalanzahl von turns zu erreichen sind. Im vorliegenden städtebaulichen Maßstab sind diese Radien übliche Fußgängerdistanzen.
Die Analyse liefert potentielle Zugänglichkeiten, die üblicherweise in einer kalt-warm Farbs-kalierung graphisch dargestellt werden (i.e. Blau entspricht geringster Zugänglichkeit, Rot/Magenta entspricht höchster Zugänglichkeit).
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 9
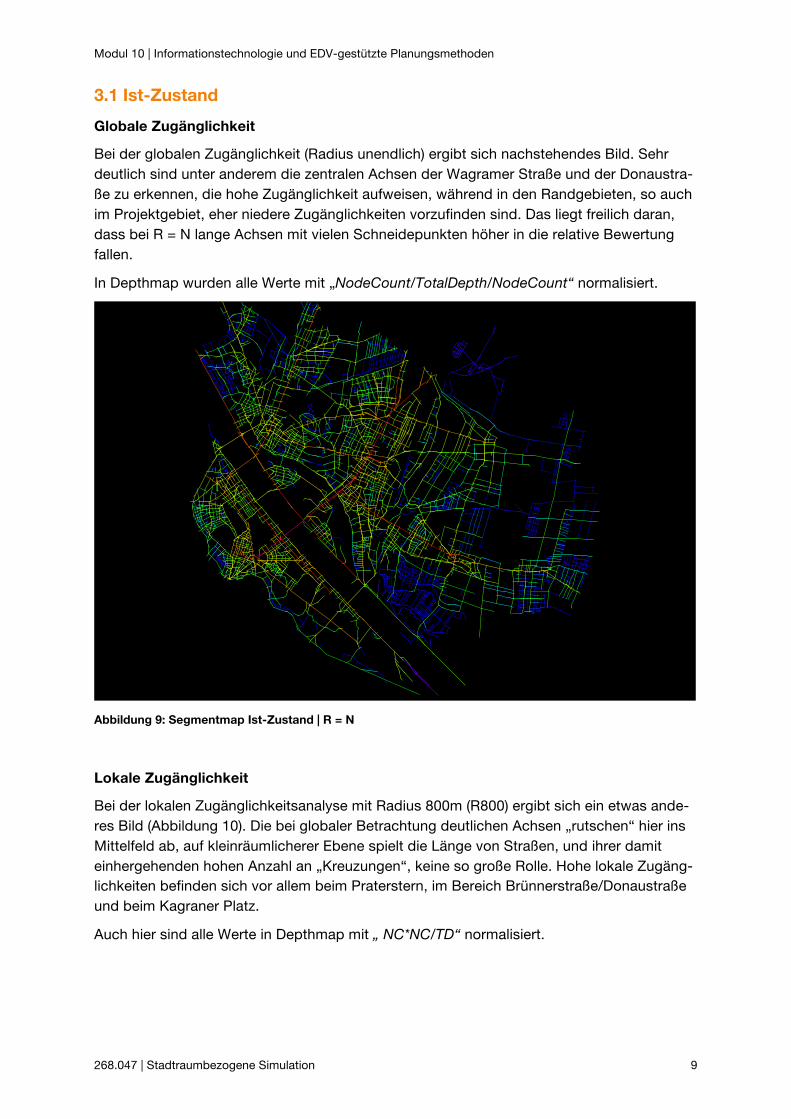
3.1 Ist-Zustand Globale Zugänglichkeit
Bei der globalen Zugänglichkeit (Radius unendlich) ergibt sich nachstehendes Bild. Sehr deutlich sind unter anderem die zentralen Achsen der Wagramer Straße und der Donaustra-ße zu erkennen, die hohe Zugänglichkeit aufweisen, während in den Randgebieten, so auch im Projektgebiet, eher niedere Zugänglichkeiten vorzufinden sind. Das liegt freilich daran, dass bei R = N lange Achsen mit vielen Schneidepunkten höher in die relative Bewertung fallen.
In Depthmap wurden alle Werte mit „NodeCount/TotalDepth/NodeCount“ normalisiert.
Abbildung 9: Segmentmap Ist-Zustand | R = N
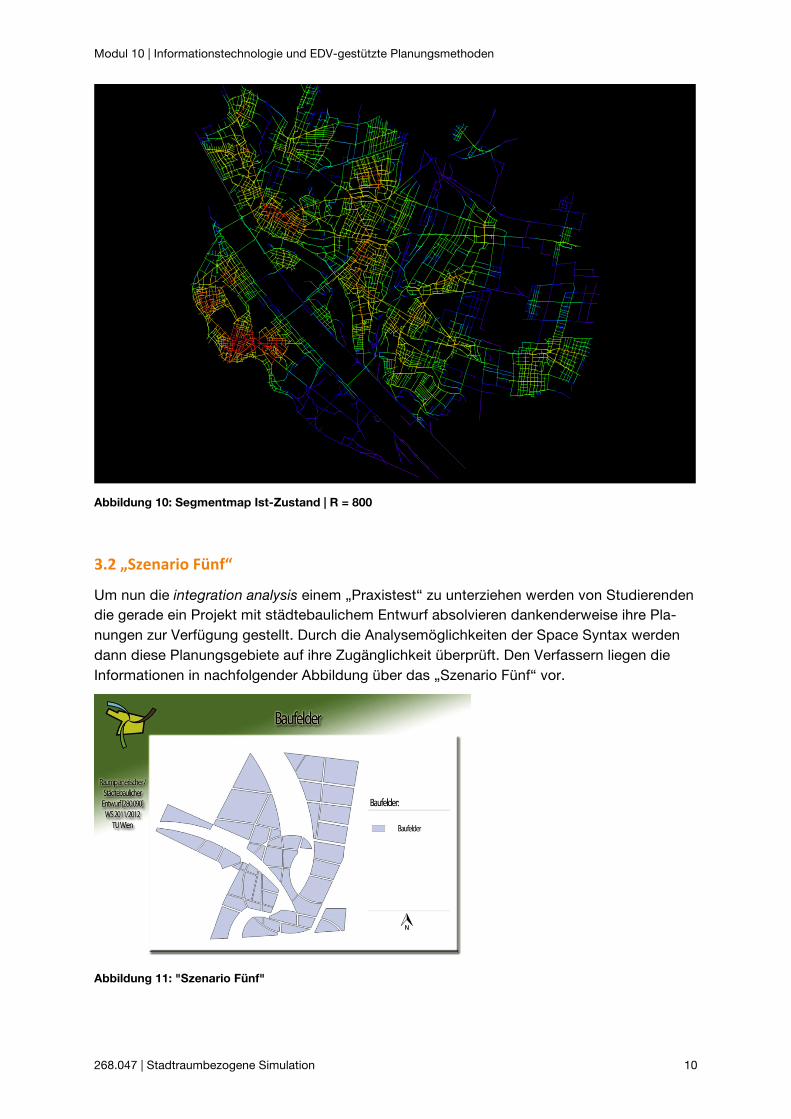
Lokale Zugänglichkeit
Bei der lokalen Zugänglichkeitsanalyse mit Radius 800m (R800) ergibt sich ein etwas ande-res Bild (Abbildung 10). Die bei globaler Betrachtung deutlichen Achsen „rutschen“ hier ins Mittelfeld ab, auf kleinräumlicherer Ebene spielt die Länge von Straßen, und ihrer damit einhergehenden hohen Anzahl an „Kreuzungen“, keine so große Rolle. Hohe lokale Zugäng-lichkeiten befinden sich vor allem beim Praterstern, im Bereich Brünnerstraße/Donaustraße und beim Kagraner Platz.
Auch hier sind alle Werte in Depthmap mit „ NC*NC/TD“ normalisiert.
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 10
Abbildung 10: Segmentmap Ist-Zustand | R = 800
3.2 „Szenario Fünf“
Um nun die integration analysis einem „Praxistest“ zu unterziehen werden von Studierenden die gerade ein Projekt mit städtebaulichem Entwurf absolvieren dankenderweise ihre Pla-nungen zur Verfügung gestellt. Durch die Analysemöglichkeiten der Space Syntax werden dann diese Planungsgebiete auf ihre Zugänglichkeit überprüft. Den Verfassern liegen die Informationen in nachfolgender Abbildung über das „Szenario Fünf“ vor.
Abbildung 11: "Szenario Fünf"
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 11
Die Gruppe hat ihr Gebiet in Baufelder geteilt, die sich daraus zu interpretierenden Wegeachsen werden durch die Autoren einer Space Syntax Analyse unterzogen.
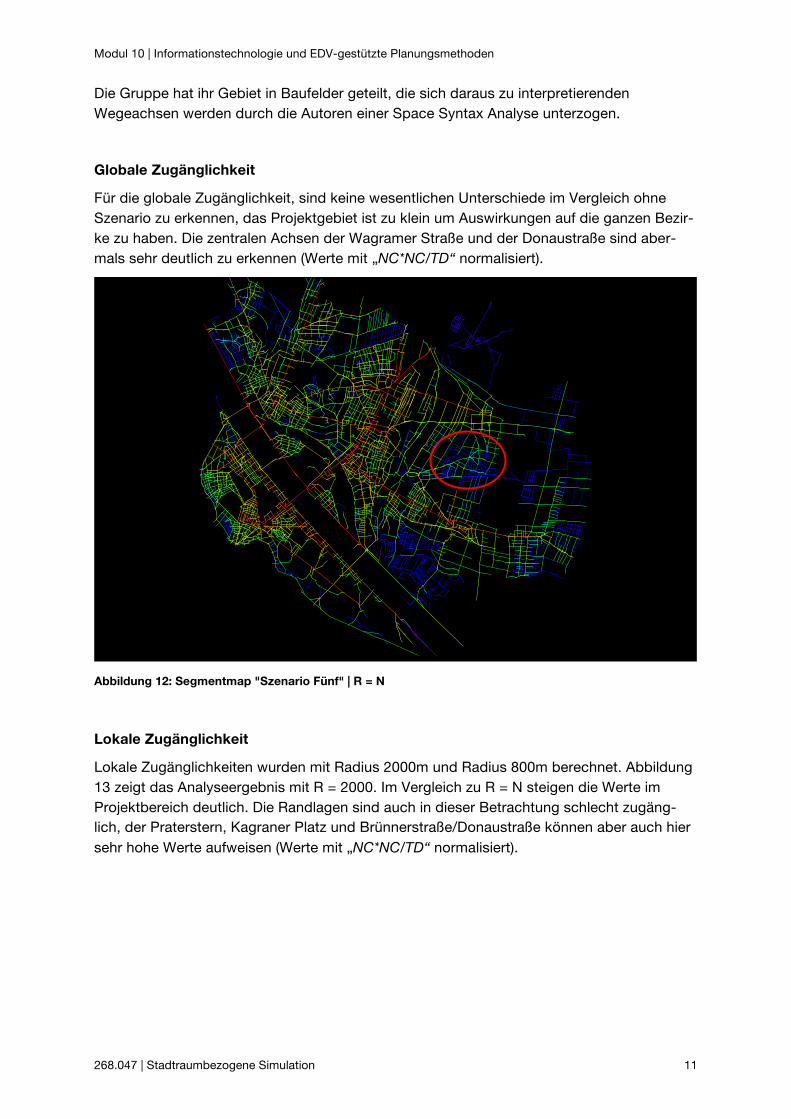
Globale Zugänglichkeit
Für die globale Zugänglichkeit, sind keine wesentlichen Unterschiede im Vergleich ohne Szenario zu erkennen, das Projektgebiet ist zu klein um Auswirkungen auf die ganzen Bezir-ke zu haben. Die zentralen Achsen der Wagramer Straße und der Donaustraße sind aber-mals sehr deutlich zu erkennen (Werte mit „NC*NC/TD“ normalisiert).
Abbildung 12: Segmentmap "Szenario Fünf" | R = N
Lokale Zugänglichkeit
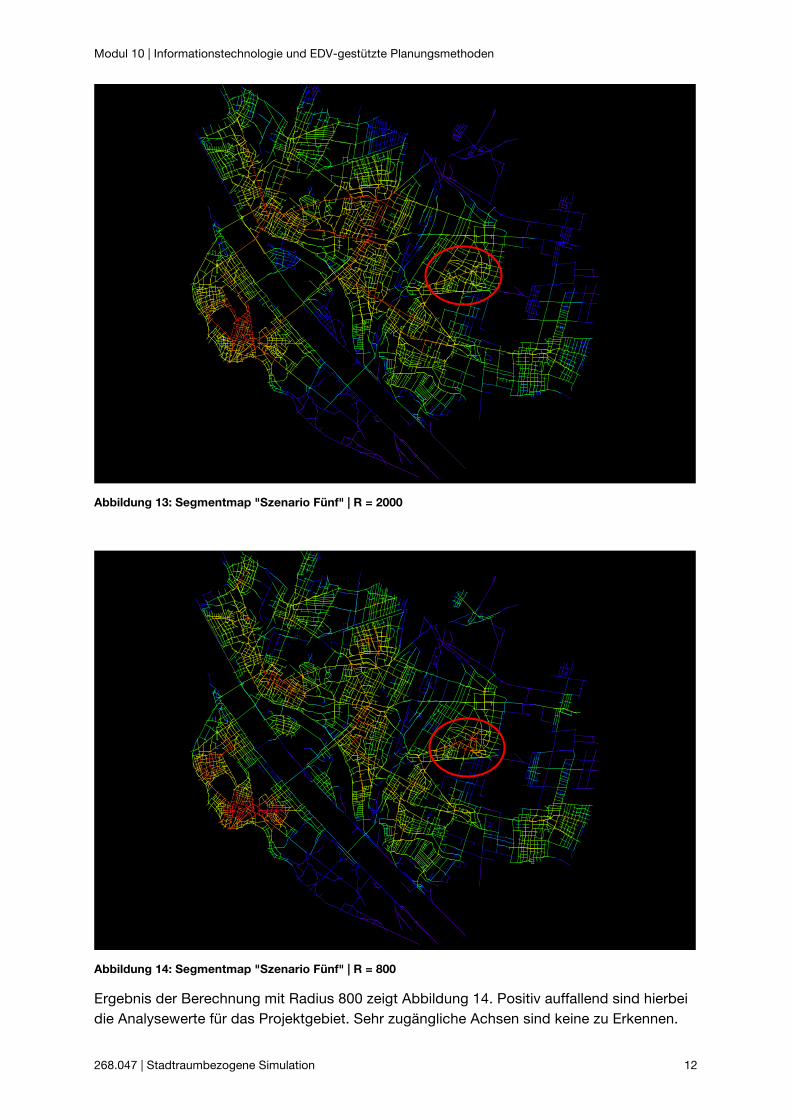
Lokale Zugänglichkeiten wurden mit Radius 2000m und Radius 800m berechnet. Abbildung 13 zeigt das Analyseergebnis mit R = 2000. Im Vergleich zu R = N steigen die Werte im Projektbereich deutlich. Die Randlagen sind auch in dieser Betrachtung schlecht zugäng-lich, der Praterstern, Kagraner Platz und Brünnerstraße/Donaustraße können aber auch hier sehr hohe Werte aufweisen (Werte mit „NC*NC/TD“ normalisiert).
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 12
Abbildung 13: Segmentmap "Szenario Fünf" | R = 2000
Abbildung 14: Segmentmap "Szenario Fünf" | R = 800
Ergebnis der Berechnung mit Radius 800 zeigt Abbildung 14. Positiv auffallend sind hierbei die Analysewerte für das Projektgebiet. Sehr zugängliche Achsen sind keine zu Erkennen.
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 13
Hohe Werte befinden sich abermals beim Praterstern, Kagraner Platz und im Bereich Brün-nerstraße/Donaustraße.
3.3 Vergleich Ist-‐Zustand / „Szenario Fünf“
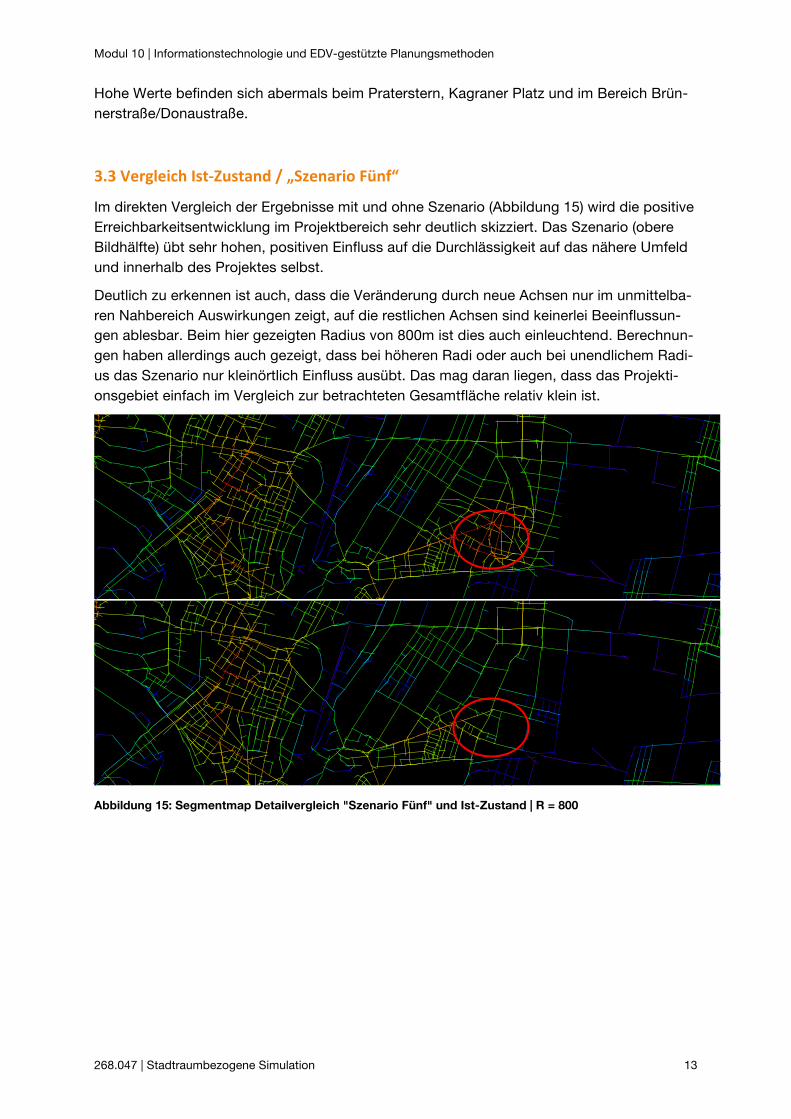
Im direkten Vergleich der Ergebnisse mit und ohne Szenario (Abbildung 15) wird die positive Erreichbarkeitsentwicklung im Projektbereich sehr deutlich skizziert. Das Szenario (obere Bildhälfte) übt sehr hohen, positiven Einfluss auf die Durchlässigkeit auf das nähere Umfeld und innerhalb des Projektes selbst.
Deutlich zu erkennen ist auch, dass die Veränderung durch neue Achsen nur im unmittelba-ren Nahbereich Auswirkungen zeigt, auf die restlichen Achsen sind keinerlei Beeinflussun-gen ablesbar. Beim hier gezeigten Radius von 800m ist dies auch einleuchtend. Berechnun-gen haben allerdings auch gezeigt, dass bei höheren Radi oder auch bei unendlichem Radi-us das Szenario nur kleinörtlich Einfluss ausübt. Das mag daran liegen, dass das Projekti-onsgebiet einfach im Vergleich zur betrachteten Gesamtfläche relativ klein ist.
Abbildung 15: Segmentmap Detailvergleich "Szenario Fünf" und Ist-Zustand | R = 800
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 14
4. Space Syntax Visibility Graph Analyse Bei der Technik der Visibilty Graph Analysis (VGA) werden alle möglichen Sichtfelder einer Raumkonfiguration überlagert, um dadurch strategisch gelegene Sichtbereiche (i.e. Zugäng-lichkeitsbereiche) zu ermitteln. Die räumliche Konfiguration wird gemessen, in dem diese Sichtfelder miteinander überlagert werden und in Relation gebracht werden.
Mit dieser Methode ist es somit möglich, zum Beispiel strategisch günstige Plätze in einem Projektgebiet zu verifizieren und eignet sich deshalb sehr gut zur Überprüfung von städte-baulichen Entwürfen und Planungen.
Die VG Analyse liefert potentielle, strategische Zugänglichkeiten, die üblicherweise in einer kalt-warm Farbskalierung graphisch dargestellt werden (i.e. Blau entspricht geringster Zu-gänglichkeit, Rot entspricht höchster Zugänglichkeit). Im Gegensatz zur vektororientierten Axial Map Analyse beruht die VGA auf Rasterzellen.
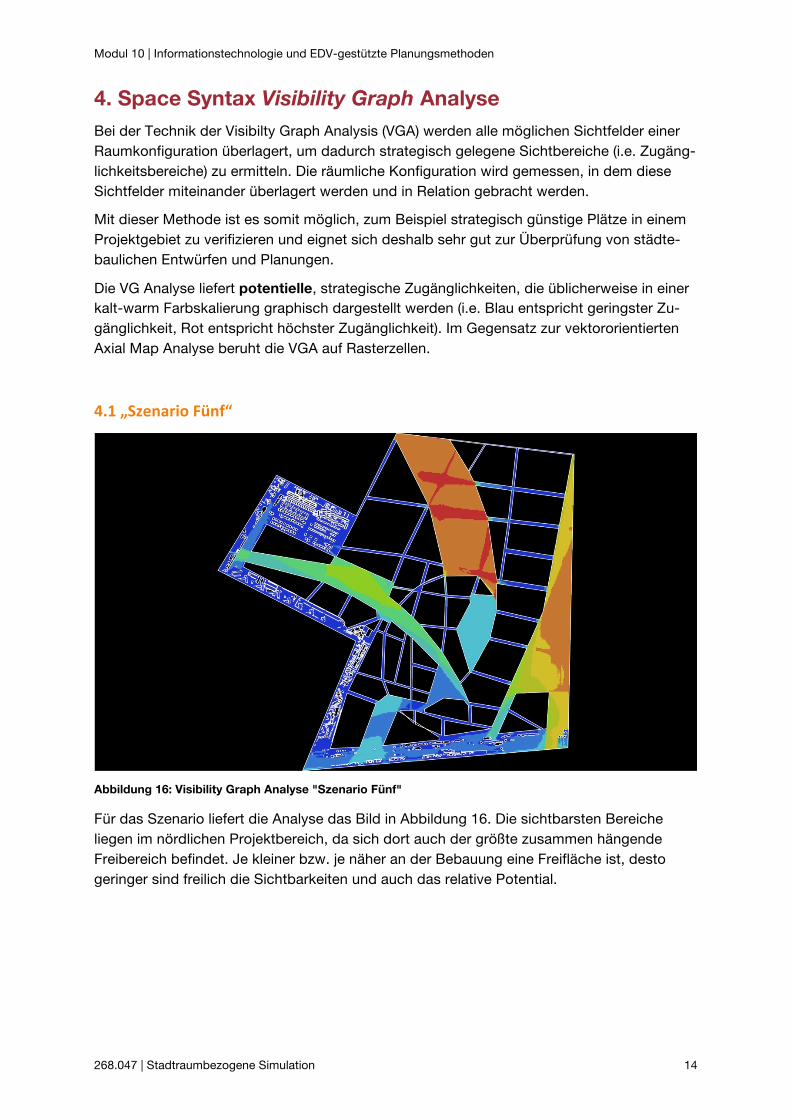
4.1 „Szenario Fünf“
Abbildung 16: Visibility Graph Analyse "Szenario Fünf"
Für das Szenario liefert die Analyse das Bild in Abbildung 16. Die sichtbarsten Bereiche liegen im nördlichen Projektbereich, da sich dort auch der größte zusammen hängende Freibereich befindet. Je kleiner bzw. je näher an der Bebauung eine Freifläche ist, desto geringer sind freilich die Sichtbarkeiten und auch das relative Potential.
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 15
4.2 „Szenario Fünf“ | Variation 1
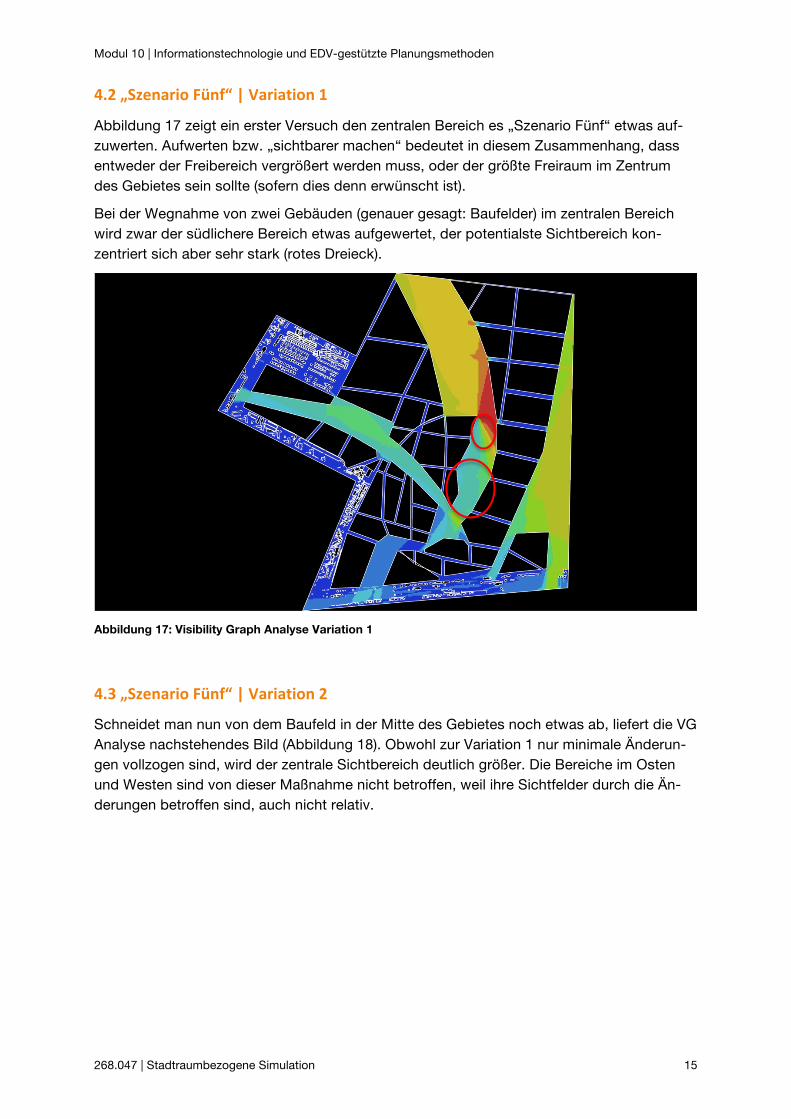
Abbildung 17 zeigt ein erster Versuch den zentralen Bereich es „Szenario Fünf“ etwas auf-zuwerten. Aufwerten bzw. „sichtbarer machen“ bedeutet in diesem Zusammenhang, dass entweder der Freibereich vergrößert werden muss, oder der größte Freiraum im Zentrum des Gebietes sein sollte (sofern dies denn erwünscht ist).
Bei der Wegnahme von zwei Gebäuden (genauer gesagt: Baufelder) im zentralen Bereich wird zwar der südlichere Bereich etwas aufgewertet, der potentialste Sichtbereich kon-zentriert sich aber sehr stark (rotes Dreieck).
Abbildung 17: Visibility Graph Analyse Variation 1
4.3 „Szenario Fünf“ | Variation 2
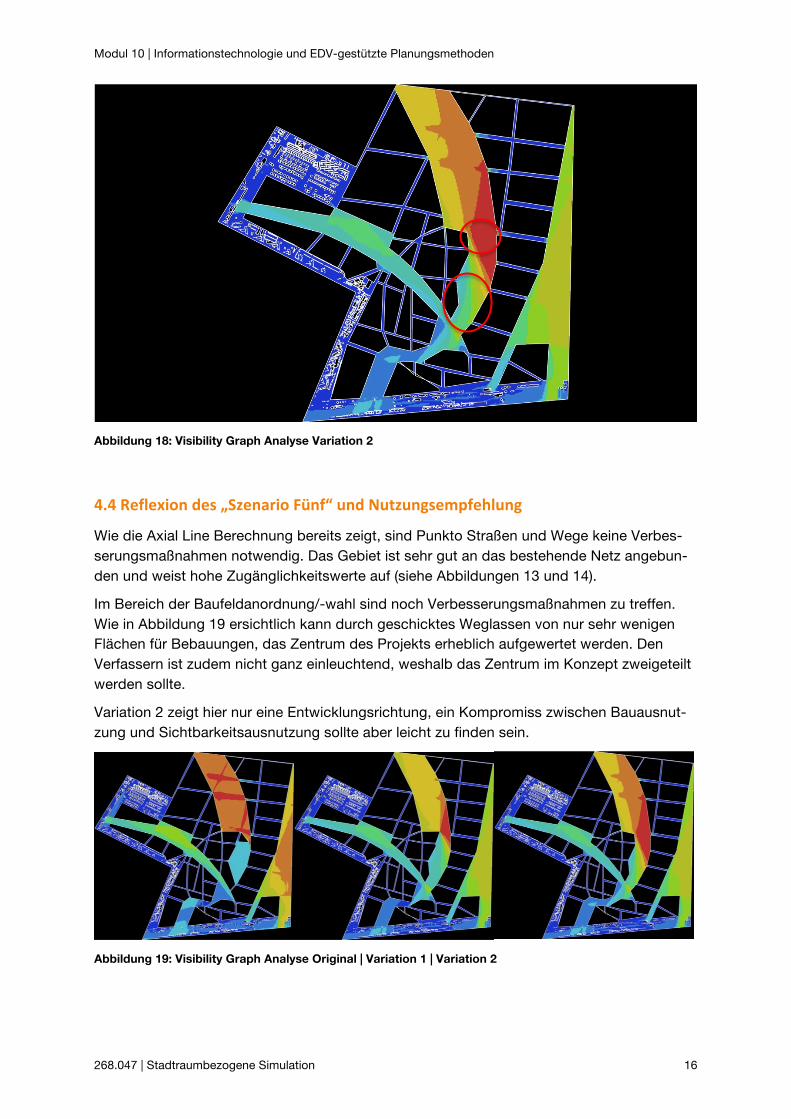
Schneidet man nun von dem Baufeld in der Mitte des Gebietes noch etwas ab, liefert die VG Analyse nachstehendes Bild (Abbildung 18). Obwohl zur Variation 1 nur minimale Änderun-gen vollzogen sind, wird der zentrale Sichtbereich deutlich größer. Die Bereiche im Osten und Westen sind von dieser Maßnahme nicht betroffen, weil ihre Sichtfelder durch die Än-derungen betroffen sind, auch nicht relativ.
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 16
Abbildung 18: Visibility Graph Analyse Variation 2
4.4 Reflexion des „Szenario Fünf“ und Nutzungsempfehlung
Wie die Axial Line Berechnung bereits zeigt, sind Punkto Straßen und Wege keine Verbes-serungsmaßnahmen notwendig. Das Gebiet ist sehr gut an das bestehende Netz angebun-den und weist hohe Zugänglichkeitswerte auf (siehe Abbildungen 13 und 14).
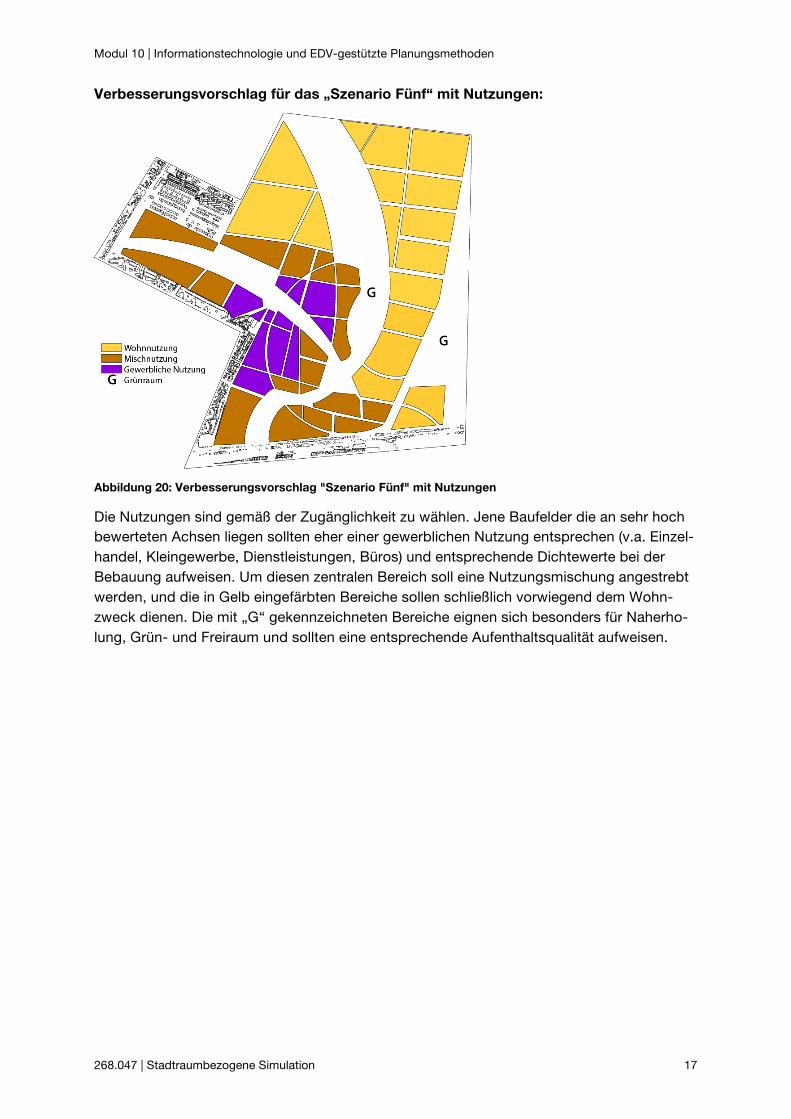
Im Bereich der Baufeldanordnung/-wahl sind noch Verbesserungsmaßnahmen zu treffen. Wie in Abbildung 19 ersichtlich kann durch geschicktes Weglassen von nur sehr wenigen Flächen für Bebauungen, das Zentrum des Projekts erheblich aufgewertet werden. Den Verfassern ist zudem nicht ganz einleuchtend, weshalb das Zentrum im Konzept zweigeteilt werden sollte.
Variation 2 zeigt hier nur eine Entwicklungsrichtung, ein Kompromiss zwischen Bauausnut-zung und Sichtbarkeitsausnutzung sollte aber leicht zu finden sein.
Abbildung 19: Visibility Graph Analyse Original | Variation 1 | Variation 2
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 17
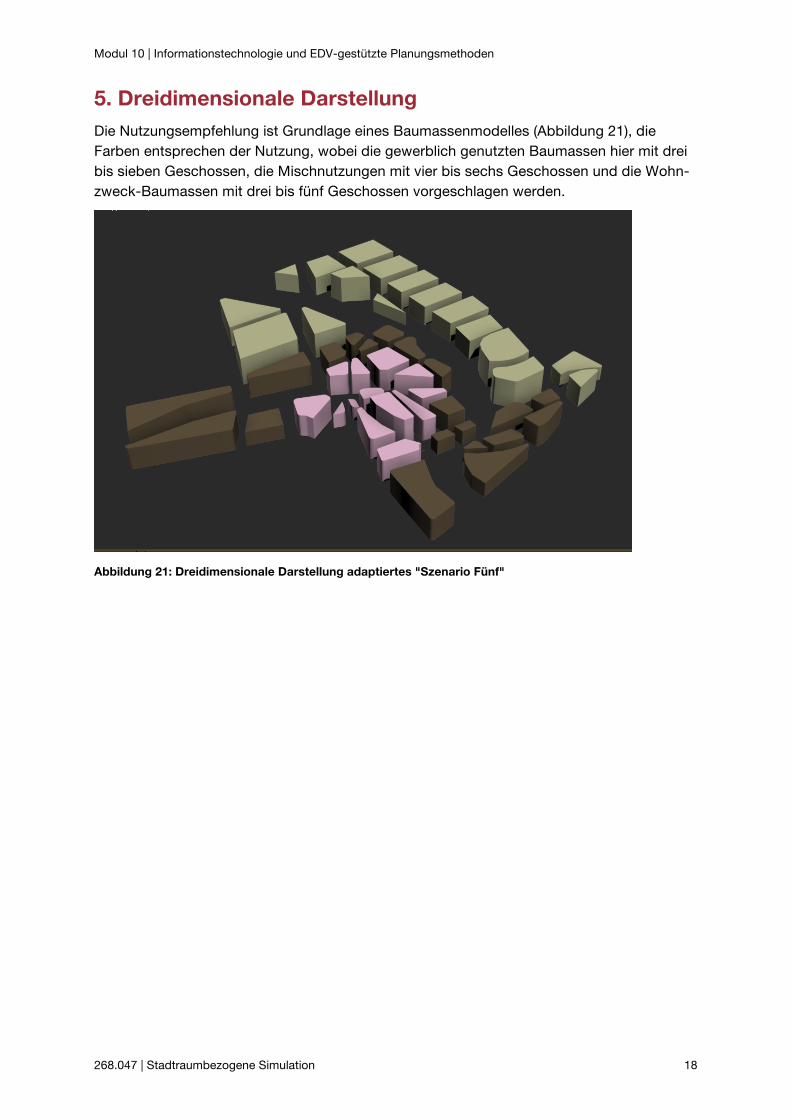
Verbesserungsvorschlag für das „Szenario Fünf“ mit Nutzungen:
Abbildung 20: Verbesserungsvorschlag "Szenario Fünf" mit Nutzungen
Die Nutzungen sind gemäß der Zugänglichkeit zu wählen. Jene Baufelder die an sehr hoch bewerteten Achsen liegen sollten eher einer gewerblichen Nutzung entsprechen (v.a. Einzel-handel, Kleingewerbe, Dienstleistungen, Büros) und entsprechende Dichtewerte bei der Bebauung aufweisen. Um diesen zentralen Bereich soll eine Nutzungsmischung angestrebt werden, und die in Gelb eingefärbten Bereiche sollen schließlich vorwiegend dem Wohn-zweck dienen. Die mit „G“ gekennzeichneten Bereiche eignen sich besonders für Naherho-lung, Grün- und Freiraum und sollten eine entsprechende Aufenthaltsqualität aufweisen.
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 18
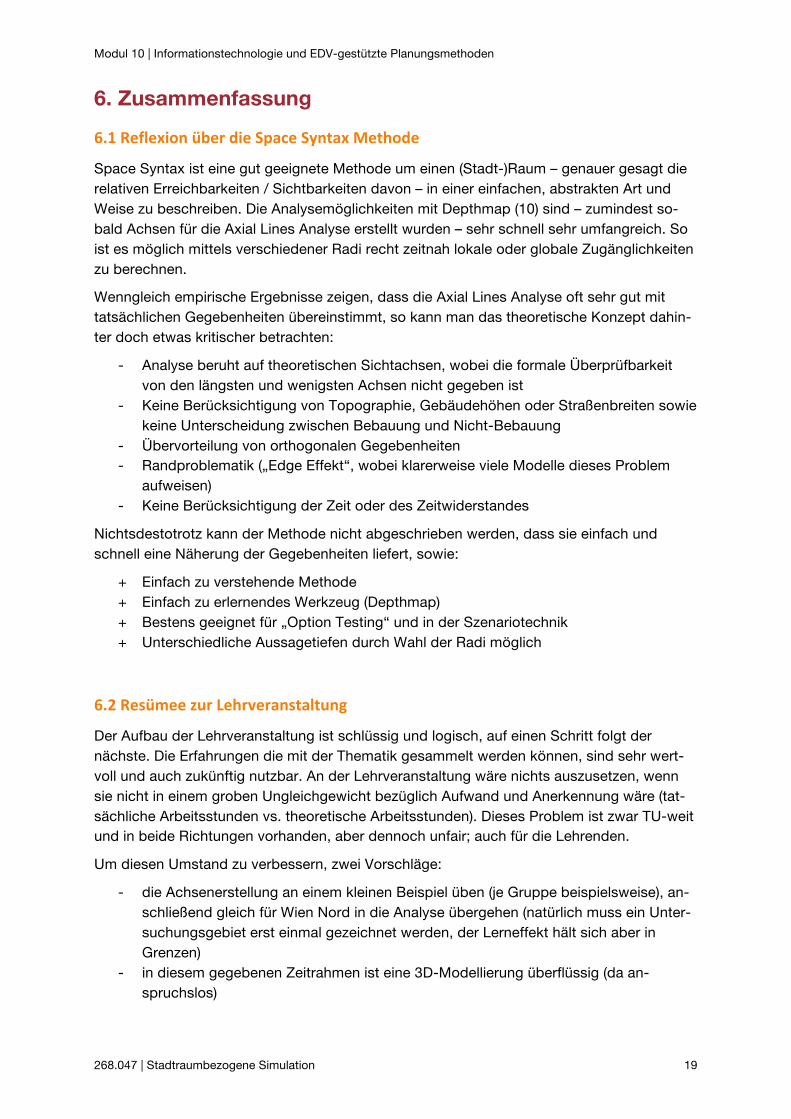
5. Dreidimensionale Darstellung Die Nutzungsempfehlung ist Grundlage eines Baumassenmodelles (Abbildung 21), die Farben entsprechen der Nutzung, wobei die gewerblich genutzten Baumassen hier mit drei bis sieben Geschossen, die Mischnutzungen mit vier bis sechs Geschossen und die Wohn-zweck-Baumassen mit drei bis fünf Geschossen vorgeschlagen werden.
Abbildung 21: Dreidimensionale Darstellung adaptiertes "Szenario Fünf"
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 19
6. Zusammenfassung 6.1 Reflexion über die Space Syntax Methode
Space Syntax ist eine gut geeignete Methode um einen (Stadt-)Raum – genauer gesagt die relativen Erreichbarkeiten / Sichtbarkeiten davon – in einer einfachen, abstrakten Art und Weise zu beschreiben. Die Analysemöglichkeiten mit Depthmap (10) sind – zumindest so-bald Achsen für die Axial Lines Analyse erstellt wurden – sehr schnell sehr umfangreich. So ist es möglich mittels verschiedener Radi recht zeitnah lokale oder globale Zugänglichkeiten zu berechnen.
Wenngleich empirische Ergebnisse zeigen, dass die Axial Lines Analyse oft sehr gut mit tatsächlichen Gegebenheiten übereinstimmt, so kann man das theoretische Konzept dahin-ter doch etwas kritischer betrachten:
- Analyse beruht auf theoretischen Sichtachsen, wobei die formale Überprüfbarkeit von den längsten und wenigsten Achsen nicht gegeben ist
- Keine Berücksichtigung von Topographie, Gebäudehöhen oder Straßenbreiten sowie keine Unterscheidung zwischen Bebauung und Nicht-Bebauung
- Übervorteilung von orthogonalen Gegebenheiten - Randproblematik („Edge Effekt“, wobei klarerweise viele Modelle dieses Problem
aufweisen) - Keine Berücksichtigung der Zeit oder des Zeitwiderstandes
Nichtsdestotrotz kann der Methode nicht abgeschrieben werden, dass sie einfach und schnell eine Näherung der Gegebenheiten liefert, sowie:
+ Einfach zu verstehende Methode + Einfach zu erlernendes Werkzeug (Depthmap) + Bestens geeignet für „Option Testing“ und in der Szenariotechnik + Unterschiedliche Aussagetiefen durch Wahl der Radi möglich
6.2 Resümee zur Lehrveranstaltung
Der Aufbau der Lehrveranstaltung ist schlüssig und logisch, auf einen Schritt folgt der nächste. Die Erfahrungen die mit der Thematik gesammelt werden können, sind sehr wert-voll und auch zukünftig nutzbar. An der Lehrveranstaltung wäre nichts auszusetzen, wenn sie nicht in einem groben Ungleichgewicht bezüglich Aufwand und Anerkennung wäre (tat-sächliche Arbeitsstunden vs. theoretische Arbeitsstunden). Dieses Problem ist zwar TU-weit und in beide Richtungen vorhanden, aber dennoch unfair; auch für die Lehrenden.
Um diesen Umstand zu verbessern, zwei Vorschläge:
- die Achsenerstellung an einem kleinen Beispiel üben (je Gruppe beispielsweise), an-schließend gleich für Wien Nord in die Analyse übergehen (natürlich muss ein Unter-suchungsgebiet erst einmal gezeichnet werden, der Lerneffekt hält sich aber in Grenzen)
- in diesem gegebenen Zeitrahmen ist eine 3D-Modellierung überflüssig (da an-spruchslos)
Modul 10 | Informationstechnologie und EDV-gestützte Planungsmethoden
268.047 | Stadtraumbezogene Simulation 20
Verzeichnisse Abbildungsverzeichnis
Abbildung 1: Übersicht über das Untersuchungsgebiet mit Fotostandorten .......................... 4
Abbildung 2: Hausfeldstraße .................................................................................................... 5
Abbildung 3: Quadenstraße ..................................................................................................... 5
Abbildung 4: Grete-Zimmer-Gasse .......................................................................................... 5
Abbildung 5: Karl-Bedranik-Gasse .......................................................................................... 6
Abbildung 6: Ziegelhofstraße ................................................................................................... 6
Abbildung 7: Lackenjöchelgasse ............................................................................................. 7
Abbildung 8: Am Heidjöchl ...................................................................................................... 7
Abbildung 9: Segmentmap Ist-Zustand | R = N ....................................................................... 9
Abbildung 10: Segmentmap Ist-Zustand | R = 800 ............................................................... 10
Abbildung 11: "Szenario Fünf" ............................................................................................... 10
Abbildung 12: Segmentmap "Szenario Fünf" | R = N ............................................................ 11
Abbildung 13: Segmentmap "Szenario Fünf" | R = 2000 ....................................................... 12
Abbildung 14: Segmentmap "Szenario Fünf" | R = 800 ......................................................... 12
Abbildung 15: Segmentmap Detailvergleich "Szenario Fünf" und Ist-Zustand | R = 800 ...... 13
Abbildung 16: Visibility Graph Analyse "Szenario Fünf" ........................................................ 14
Abbildung 17: Visibility Graph Analyse Variation 1 ................................................................ 15
Abbildung 18: Visibility Graph Analyse Variation 2 ................................................................ 16
Abbildung 19: Visibility Graph Analyse Original | Variation 1 | Variation 2 ............................. 16
Abbildung 20: Verbesserungsvorschlag "Szenario Fünf" mit Nutzungen .............................. 17
Abbildung 21: Dreidimensionale Darstellung adaptiertes "Szenario Fünf" ............................ 18
Quellen
HILLIER, Bill. Space is the machine: a configurational theory of architecture; e-edition, Space Syntax Ltd., London, 2007
JONES, Catherine et al. “ A multi - disciplinary perspective on the built environement. Space Syntax and Cartograqphy - the communication challenge” in: Proceedings of the 7th inter-national Space Syntax Symposium, KTH Stockholm, 2009
RATTI, Carlo. “Space syntax: some inconsistencies” in: Environmental. Environment and Planning B: Planning and Design 2004, volume 31, S. 487 – 499, London, 2003