Embed Size (px)
Citation preview

SP-CNN: A Scalable and Programmable CNN-based Accelerator
Dilan Manatunga
Dr. Hyesoon Kim
Dr. SaibalMukhopadhyay

Motivation
Power is a first-order design constraint, especially for embedded devices.
Certain applications prevalent in embedded devices
Image processing, audio processing, context awareness, etc.
Trend of including more specialized, energy-efficient accelerators.
Moto X 2013
Cellular Neural Networks
Investigated using Cellular Neural Networks (CNN) as a specialized accelerator
Used for variety of applications, particularly image processing
Hardware implementations known to consume very little power
Lee et al. (2008) implemented CNN chip that consumed 84mW@ 130nm
Issue: Current hardware Cellular Neural Network processing capabilities have not scaled with the growth in image sizes.

Outline
Cellular Neural Network (CNN) Background
Multiplexing
SP-CNN Architecture
Results
Neural Networks
Artificial Neural Network
Convolutional Neural NetworkHopfield Neural Network
Radial Basis Function Network Self-Organizing Map Recurrent Neural Network
Adaptive Resonance Theory Pulse-Coupled Neural Network Spiking Neural Network
Cellular Neural Network (CNN)
CNN Background
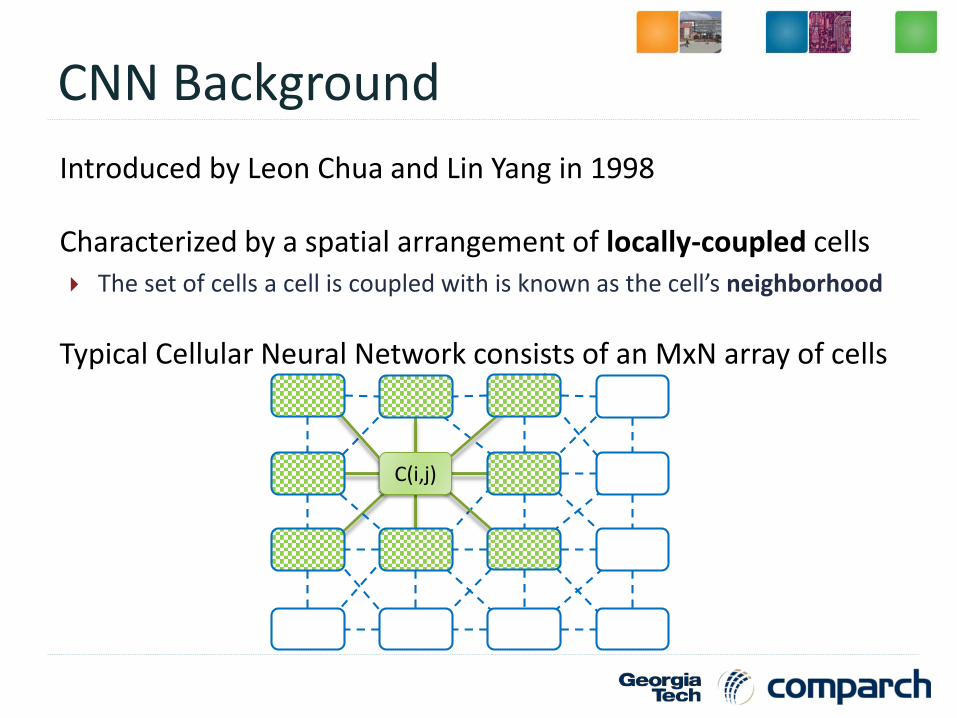
Introduced by Leon Chua and Lin Yang in 1998
Characterized by a spatial arrangement of locally-coupled cells
The set of cells a cell is coupled with is known as the cell’s neighborhood
Typical Cellular Neural Network consists of an MxN array of cells
C(i,j)

CNN Applications
Image Processing Edge Detection, Image Segmentation, Movement Detection, etc.
Pattern Recognition
Associative Memory
Solving Partial Differential Equations
Pre-data processing for other neural networks
CNN Universal Machine is Turing Complete

CNN Cell
Each cell is a dynamical system with an input, output, and a state thatevolves according to some prescribed laws.
Most CNNs follow the standard CNN state and output equations:𝑑𝑥𝑖𝑗(𝑡)
𝑑𝑡= −𝑥𝑖𝑗 𝑡 +
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑗
𝑎𝑘𝑙 ∗ 𝑦(𝑡)𝑘𝑙 +
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑗
𝑏𝑘𝑙 ∗ 𝑢𝑘𝑙 + 𝑧
𝑦𝑖𝑗 𝑡 =1
2𝑥𝑖𝑗 𝑡 + 1 − 𝑥𝑖𝑗 𝑡 − 1
𝑁𝑟 𝑖, 𝑘 represents neighborhood for cell at location i,j
x represents the current state
y is the cell outputs
u is the cell inputs
z is the threshold value
a and b are the feed-forward and feedback weights
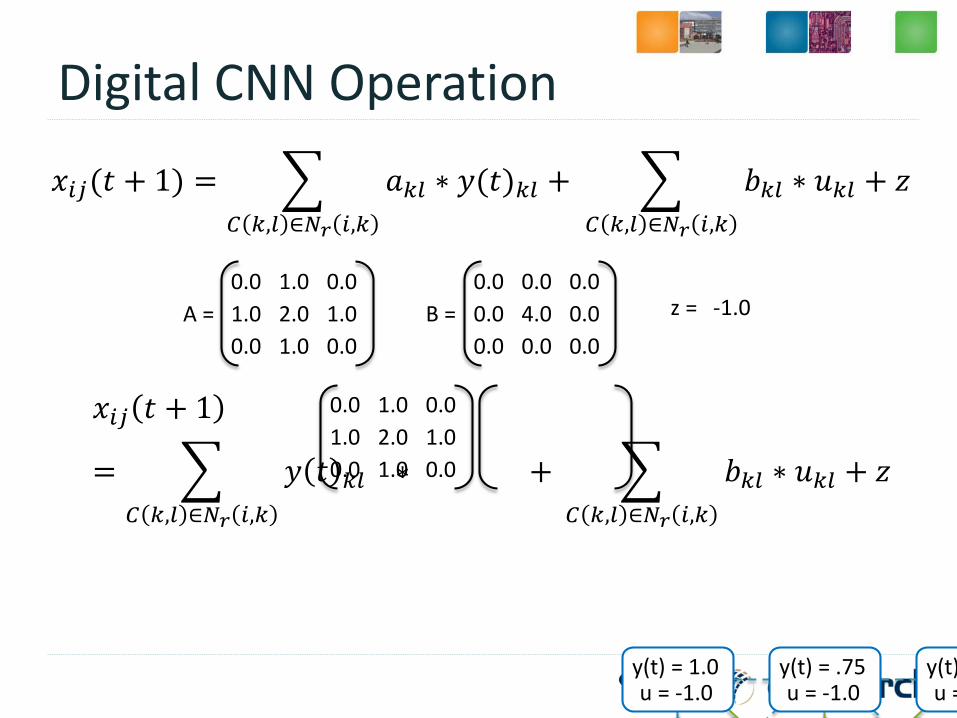
Digital CNN Cell
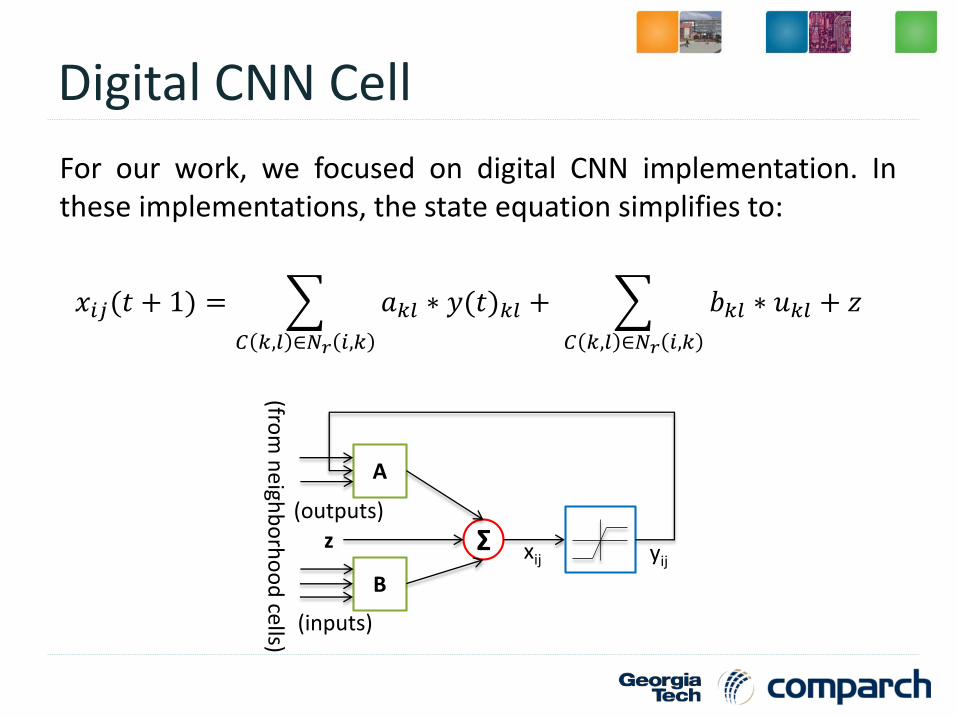
For our work, we focused on digital CNN implementation. Inthese implementations, the state equation simplifies to:
𝑥𝑖𝑗(𝑡 + 1) =
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑘
𝑎𝑘𝑙 ∗ 𝑦(𝑡)𝑘𝑙 +
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑘
𝑏𝑘𝑙 ∗ 𝑢𝑘𝑙 + 𝑧
A
B
Σz(outputs)
(inputs)
xij yij
(from
ne
ighb
orh
oo
d cells)
CNN Gene
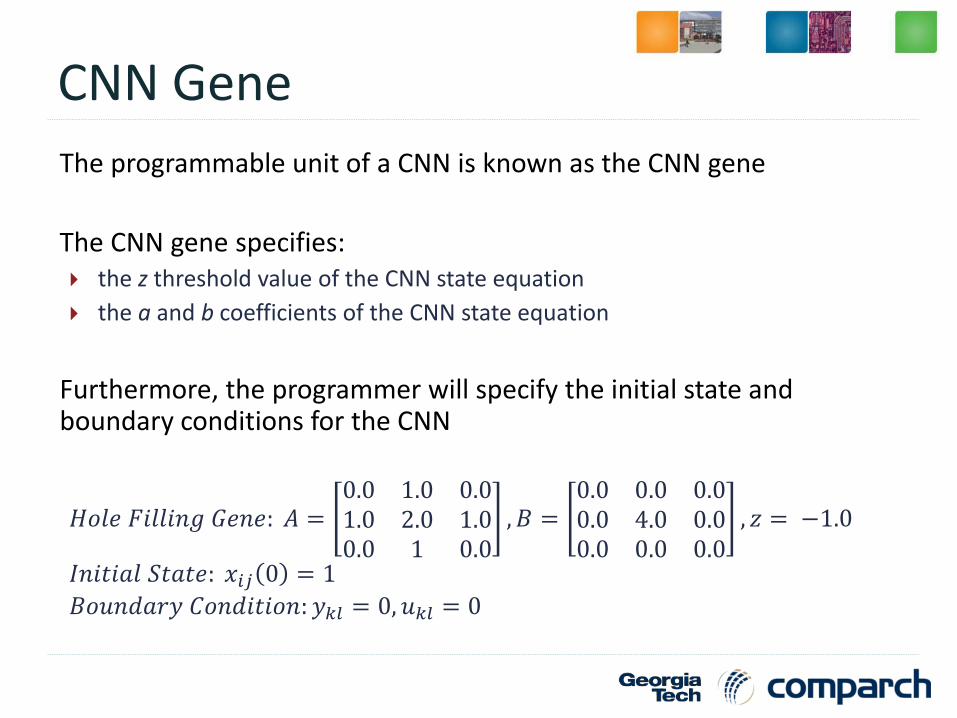
The programmable unit of a CNN is known as the CNN gene
The CNN gene specifies: the z threshold value of the CNN state equation
the a and b coefficients of the CNN state equation
Furthermore, the programmer will specify the initial state and boundary conditions for the CNN
𝐻𝑜𝑙𝑒 𝐹𝑖𝑙𝑙𝑖𝑛𝑔 𝐺𝑒𝑛𝑒: 𝐴 =0.0 1.0 0.01.0 2.0 1.00.0 1 0.0
, 𝐵 =0.0 0.0 0.00.0 4.0 0.00.0 0.0 0.0
, 𝑧 = −1.0
𝐼𝑛𝑖𝑡𝑖𝑎𝑙 𝑆𝑡𝑎𝑡𝑒: 𝑥𝑖𝑗 0 = 1
𝐵𝑜𝑢𝑛𝑑𝑎𝑟𝑦 𝐶𝑜𝑛𝑑𝑖𝑡𝑖𝑜𝑛: 𝑦𝑘𝑙 = 0, 𝑢𝑘𝑙 = 0

Example Application
The following is an example of running the HoleFilling gene, an application commonly used in character recognition, on a input image of the number eight.
Hardware CNNs
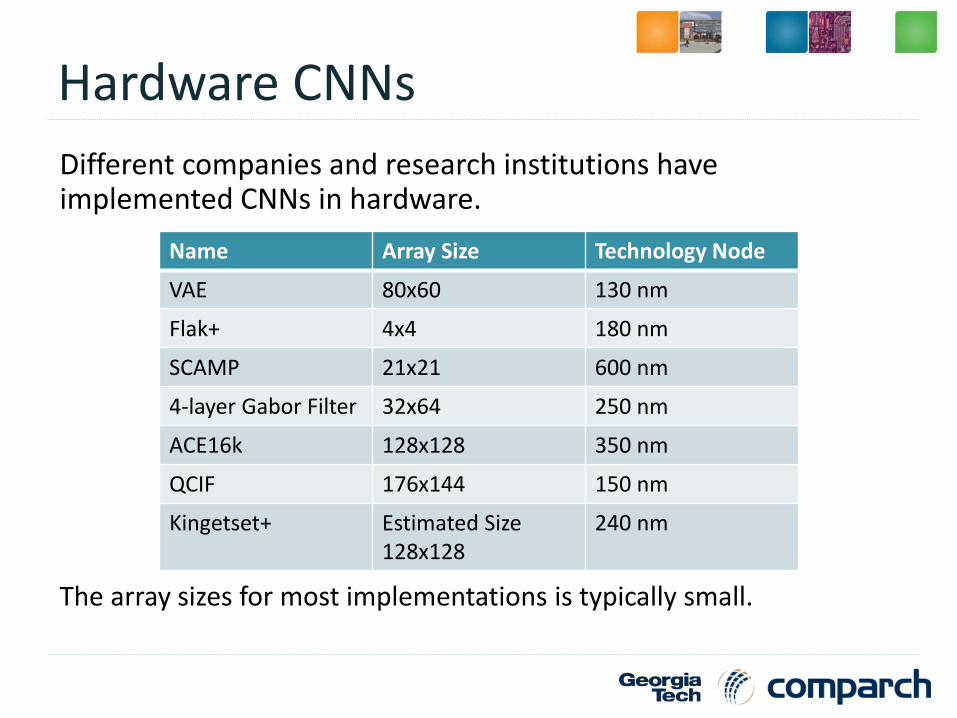
Different companies and research institutions have implemented CNNs in hardware.
The array sizes for most implementations is typically small.
Name Array Size Technology Node
VAE 80x60 130 nm
Flak+ 4x4 180 nm
SCAMP 21x21 600 nm
4-layer Gabor Filter 32x64 250 nm
ACE16k 128x128 350 nm
QCIF 176x144 150 nm
Kingetset+ Estimated Size 128x128
240 nm
Issue: Image Dim vs CNN Array Dim
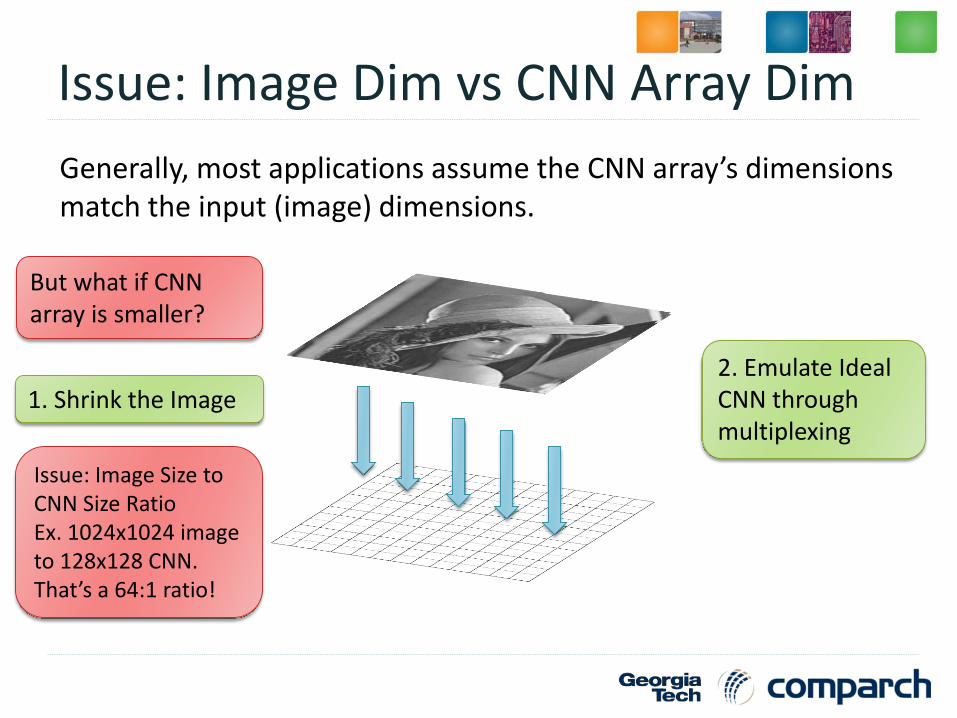
Generally, most applications assume the CNN array’s dimensions match the input (image) dimensions.
But what if CNN array is smaller?
1. Shrink the Image
Issue: Image Size toCNN Size RatioEx. 1024x1024 image to 128x128 CNN.That’s a 64:1 ratio!
2. Emulate Ideal CNN through multiplexing
Partition 1 CNN StateT=0
Partition 3 CNN StateT=0
Partition 2 CNN StateT=0
Partition 0 CNN StateT=0
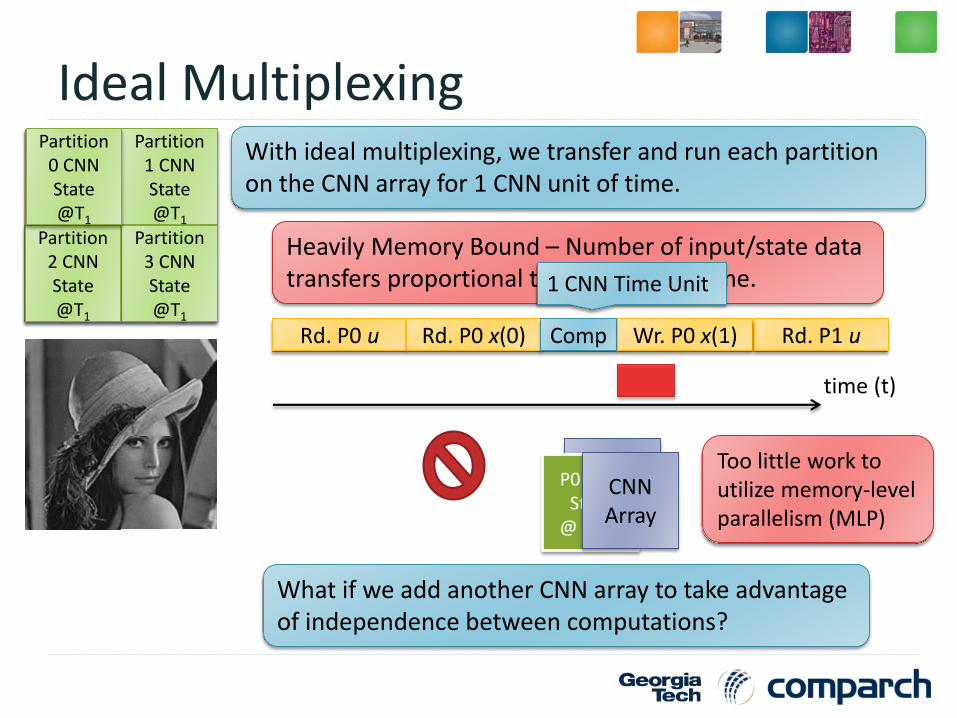
Ideal MultiplexingWith ideal multiplexing, we transfer and run each partition on the CNN array for 1 CNN unit of time.
Heavily Memory Bound – Number of input/state data transfers proportional to convergence time.
Partition 1 CNN State@T1
Partition 3 CNN State@T1
Partition 2 CNN State@T1
Rd. P0 u Rd. P0 x(0) Comp Wr. P0 x(1)
Partition 0 CNN State@T1
time (t)
What if we add another CNN array to take advantage of independence between computations?
Too little work to utilize memory-level parallelism (MLP)
Rd. P1 u
CNN Array
P0 CNN State
@ T1+1
CNN Array
1 CNN Time Unit
Key-Insight
Let’s take advantage of CNNs ability to still converge to thecorrect solution in presence of small errors.
So, instead of running for partition on CNN array for 1 unit time,run partition for an interval T >> 1 unit of time.
This is the key insight to our Scalable and Programmable CNN(SP-CNN) architecture.

SP-CNN Multiplexing
With SP-CNN multiplexing, we run each partition on the CNN array for a certain interval of time.
Run for 1 CNN Unit of Time
Run for INTERVAL CNN unit of TimeRd. P0 u Rd. P0 x(0) Comp Wr. P0 x(1)
Rd. P0 u Rd. P0 x(0) Comp (INTERVAL=4) Wr. P0 x(1)
time (t)
1st iteration
interval
2nd iteration
cnn-time (t)4 8 12 16 20 24 28 320
SP-CNNINTERVAL=4

Boundary Conditions
When running a partition on the CNN array, what should we set boundary conditions to?
To ensure that information propagates between partitions, we set the boundary condition for a given partition to its neighboring cells.
Partition 0 Pixel
Partition 1 Pixel
Partition 0 Boundary Pixel
Partition 0 Boundary made of Partition 1 Data
True Boundary Condition for Image
Partition 0 Boundary also part of True Boundary
Image Pixel
True Boundary Cond.
P0@T1
P1@T1
P2@T1
P3@T1
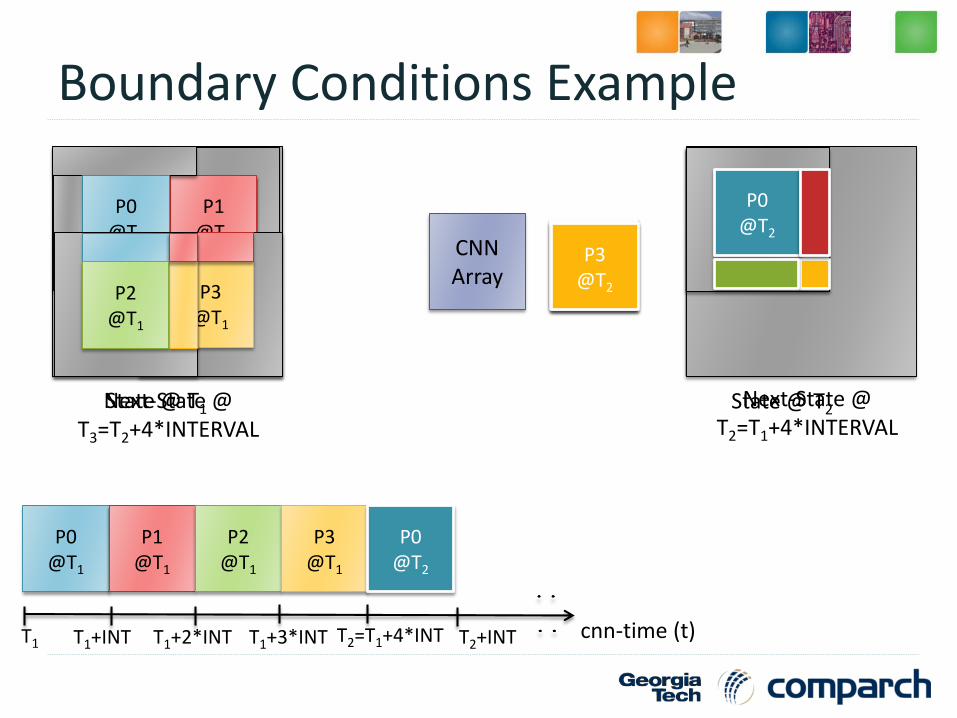
Boundary Conditions Example
CNN Array
State @ T1 Next-State @ T2=T1+4*INTERVAL
cnn-time (t)T1+INTT1
P0@T1
P1@T1
P2@T1
P3@T1
T1+2*INT T1+3*INT T2=T1+4*INT
P0@T2
P1@T1
P0@T1
P3@T1
P1@T2P2
@T1
P2@T2
P3@T2
P0@T2
T2+INT
P0@T2
Next-State @ T3=T2+4*INTERVAL
State @ T2
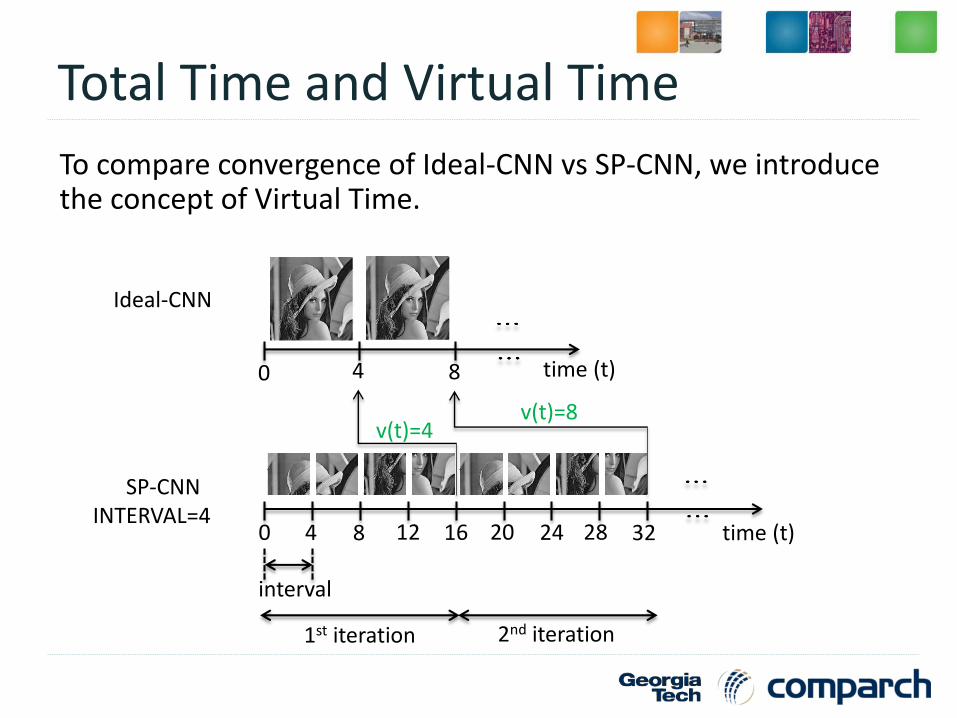
Total Time and Virtual Time
To compare convergence of Ideal-CNN vs SP-CNN, we introduce the concept of Virtual Time.
1st iteration
interval
2nd iteration
time (t)4 8 12 16 20 24 28 320
v(t)=4v(t)=8
time (t)4 80
Ideal-CNN
SP-CNNINTERVAL=4

Reduced Memory Transfers
If virtual convergence time does not significantly increase in the SP-CNN case, we can significantly reduce number of memory transfers.
Ideal-CNN
Virtual Convergence Time (t)1 2 3 4 5 6 7 80
P0 P1 P2 P3 P0 P1 P2 P3
T-4 T-2 T-2 T-1 T
P0 P1 P2 P3
Virtual Convergence Time (t)
1 2 3 4 5 6 7 80
P0 P1
T2-4 T2-3 T2-2 T2-1 T2
P3SP-CNNINTERVAL=4
T Memory Transfers
T2/INTERVAL Memory Transfers
If T≅T2, than memory transfers reduced by factor of about 1/INTERVAL.
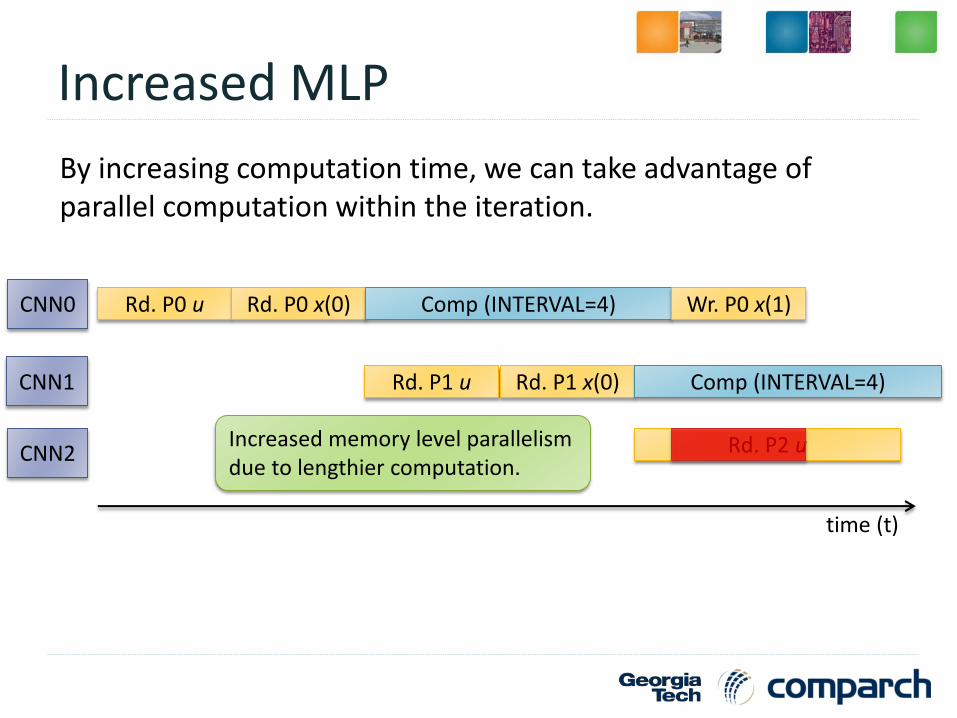
Increased MLP
By increasing computation time, we can take advantage of parallel computation within the iteration.
time (t)
Rd. P0 u Rd. P0 x(0) Comp (INTERVAL=4) Wr. P0 x(1)CNN0
Rd. P1 u Rd. P1 x(0) Comp (INTERVAL=4)CNN1
CNN2 Rd. P2 uIncreased memory level parallelism due to lengthier computation.

SP-CNN Architecture
Global memory • Stores the input
and cnn state.
CNN-P• CNN processing
unit. • Processes
partition
Scheduler• Assigns partitions
to CNN-P
Host Processor• Sends work to
SP-CNN

Methodology
6 benchmarks with 10 input images.
The test images are of size 1024x1024 (~720p) or 2048x2048 (~1440p)
*Local applications are essentially simple convolution operations that only care about neighborhood values.
Name Mechanism
Ideal CNN array size equal to Image Size
SP-CNN Proposed architecture
Application Type
Corner Detection Local*
Edge Detection Local*
Connected Component Global
Hole Filling Global
Rotation Detector Global
Shadow Creator Global

Simulators
Functional Simulator Specifications
CNN Array Size = 128x128
Interval Time = 128 cnn time units
Timing simulator (DRAMSim2 for memory)
CNN timing parameters based on VAE architecture* (200Mhz @ 130nm)
1 Processing Element for 32 cells
Each CNN-P unit has 64 MSHR entries. (Based off Nvidia Fermi)
Used 2GB DRAM memory with DDR3 timing parameters.
*VAE is an existing hardware CNN chip implementation [Lee et. Al 2008]
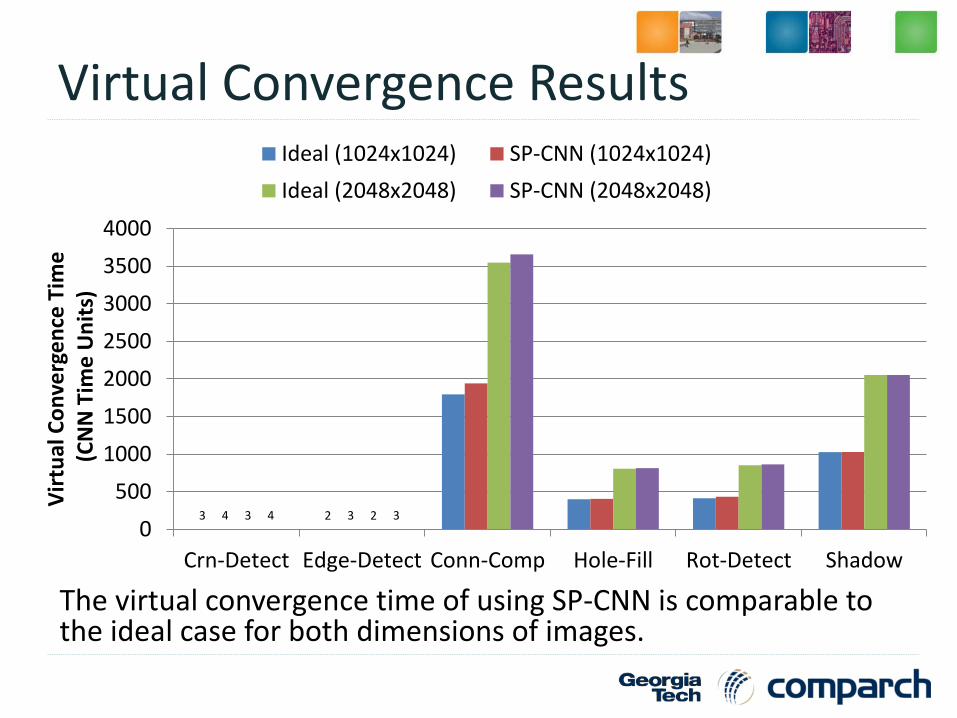
Virtual Convergence Results
The virtual convergence time of using SP-CNN is comparable to the ideal case for both dimensions of images.
3 24 33 24 3
0
500
1000
1500
2000
2500
3000
3500
4000
Crn-Detect Edge-Detect Conn-Comp Hole-Fill Rot-Detect Shadow
Vir
tual
Co
nve
rge
nce
Tim
e(C
NN
Tim
e U
nit
s)
Ideal (1024x1024) SP-CNN (1024x1024)
Ideal (2048x2048) SP-CNN (2048x2048)

Timing Results for 1024x1024
Meet 60 FPS for most applications when CNN-P = 1
Meet 60 FPS for all applications when CNN-P = 8
0
16
32
48
64
80
96
112
128
Crn-Detect Edge-Detect Conn-Comp Hole-Fill Rot-Detect Shadow
Tim
e (
ms) CNN-P=1
CNN-P=2
CNN-P=4
CNN-P=830 FPS Boundary
60 FPS Boundary

Timing Results for 2048x2048
Meet 30 FPS for most applications when CNN-P=8 60 FPS difficult to meet even with CNN-P=8
0
16
32
48
64
80
96
112
128
Crn-Detect Edge-Detect Conn-Comp Hole-Fill Rot-Detect Shadow
Tim
e (
ms) CNN-P=1
CNN-P=2
CNN-P=4
CNN-P=830 FPS Boundary
60 FPS Boundary
375 195
Future Work
Try more computationally-intensive CNN applications
Video processing, Face recognition, pattern recognition, etc.
FPGA implementation of SP-CNN Will allow us to perform better performance and power comparisons
against CPU, GPU, etc.
Further SP-CNN optimizations Determine optimal interval values
Boundary Condition Propagation Time
Determine if a CNN gene is suitable for SP-CNN
Conclusion
Our proposed SP-CNN architecture brings scalability to small sized hardware CNN arrays.
SP-CNN shows performance that is comparable to the ideal case in terms of virtual convergence time.
Energy consumption around 10 to 30 mJ.
SP-CNN can meet 30 FPS and 60 FPS standards for most benchmarks. This can further improved with better scaling of the CNN technology.

Questions?
31
Digital CNN Operation
0.0 0.0 0.0
0.0 4.0 0.0
0.0 0.0 0.0
B = z = -1.0
𝑥𝑖𝑗(𝑡 + 1) =
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑘
𝑎𝑘𝑙 ∗ 𝑦(𝑡)𝑘𝑙 +
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑘
𝑏𝑘𝑙 ∗ 𝑢𝑘𝑙 + 𝑧
y(t) = 1.0u = -1.0
y(t) = .75u = -1.0
y(t) = 1.0u = -
0.0 1.0 0.0
1.0 2.0 1.0
0.0 1.0 0.0
A =
𝑥𝑖𝑗 𝑡 + 1
=
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑘
𝑦 𝑡 𝑘𝑙 ∗ +
𝐶 𝑘,𝑙 ∈𝑁𝑟 𝑖,𝑘
𝑏𝑘𝑙 ∗ 𝑢𝑘𝑙 + 𝑧
0.0 1.0 0.0
1.0 2.0 1.0
0.0 1.0 0.0

33
The basis of the CNN operation is that we eventually converge to the correct solution.
However, there are no guarantees on the convergence time and different inputs can converge at different rates.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
1
26
51
76
10
1
12
6
15
1
17
6
20
1
22
6
25
1
27
6
30
1
32
6
35
1
37
6
40
1
42
6
45
1
47
6
50
1
52
6
55
1
57
6
60
1
62
6
65
1
67
6
70
1
72
6
75
1
77
6
80
1
Output Error of Running HoleFilling Gene on a CNN for Various 1024x1024 Test Images
capitalA
circle
eight
filledSquare
lowerA
nine
rect
seven
vertLine
zero

34
Slow Propagation
Updated information in boundary conditions is seen at the beginning of the next iteration
y(0) y(0)’s output
y(0)’s output
partition 0
partition 1
y(0)
y(1)
y(1)
1 2
3 4
5
6

35
The SP-CNN algorithm can be viewed below:
while change do
change = false
for p in partitions do
loadStateAndInputToCNN(p)
for n = 0; n < interval; n++, t++ do
change |= parallel-computation of state
parallel-computation of output
end for
saveToNextStateFromCNN(p)
end for
swapStateAndNextStatePointers(p)
iter += 1, vt += interval
end while
36
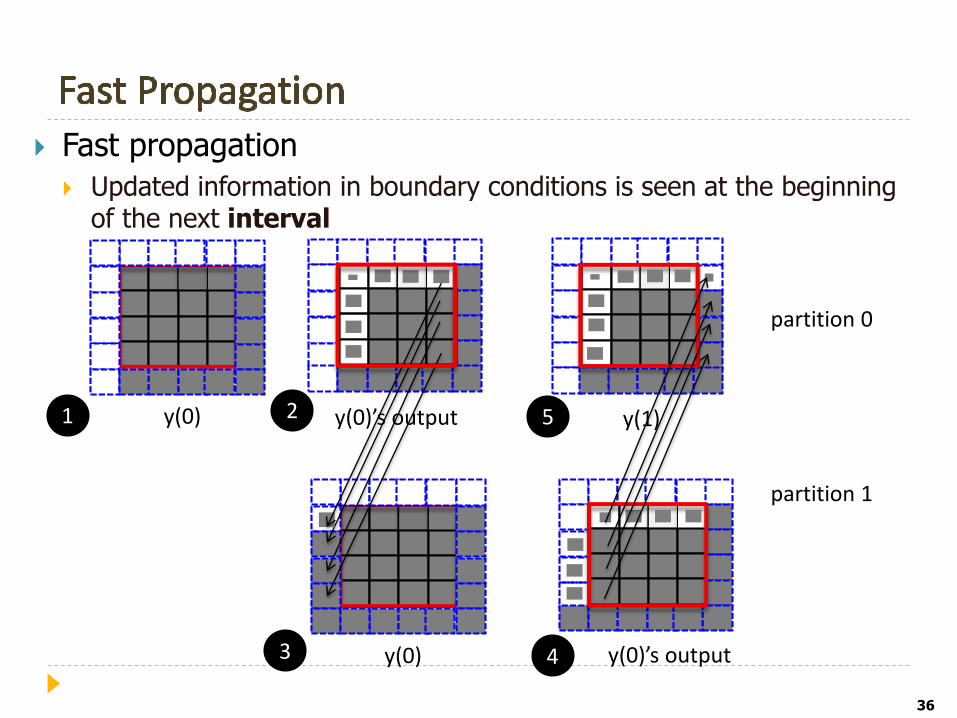
Fast propagation
Updated information in boundary conditions is seen at the beginning of the next interval
y(0) y(0)’s output y(1)
y(0) y(0)’s output
partition 0
partition 1
1
3
2
4
5

37
Using fast propagation, the partition order can improve onprogram convergence time.
For example, if data is passed through the cells from right to left, thenwe can converge faster by moving through partitions in a reversecolumn-major order.
Partition ordering only matters if fast propagation used.

38
For Connected Component, Hole Filling, and Rotation Detector, fast propagation can provide an average speedup from 15% to 30%.
Shadow Creator shows no benefit since the information propagation in that benchmark is from right-to-left.
00.10.20.30.40.50.60.70.80.9
11.11.21.31.41.5
Crn-Detect Edge-Detect Conn-Comp Hole-Fill Rot-Detect Shadow
Avg
. Sp
ee
du
p i
n
Tota
l Co
nve
rge
nce
Tim
e
1024x1024 2048x2048
39
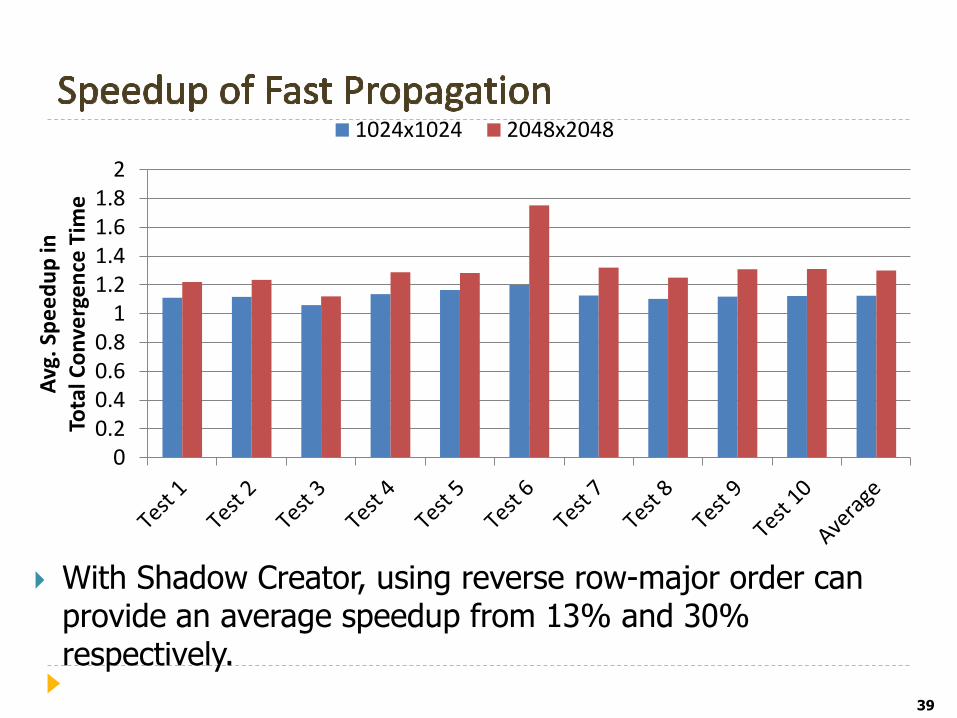
With Shadow Creator, using reverse row-major order can provide an average speedup from 13% and 30% respectively.
00.20.40.60.8
11.21.41.61.8
2
Avg
. Sp
ee
du
p in
To
tal C
on
verg
en
ce T
ime
1024x1024 2048x2048

40
Virtual Convergence Time
Originally: 𝑣𝑖𝑟𝑡𝑢𝑎𝑙𝐶𝑜𝑛𝑣𝑇𝑖𝑚𝑒 = 𝑛 ∗ 𝑇, where N is the number of iterations
Now: 𝑣𝑖𝑟𝑡𝑢𝑎𝑙𝐶𝑜𝑛𝑣𝑇𝑖𝑚𝑒 = 𝑖=1𝑛 min(𝑇,max(∀𝑝∈𝑃𝑎𝑟𝑡𝑖𝑡𝑖𝑜𝑛𝑠𝑐𝑜𝑛𝑣𝑇𝑖𝑚𝑒(𝑝, 𝑖)))
convTime(p, i) is the convergence time for partition p during iteration i

41
Both naïve mechanisms show errors on average of 20%, with max errors as high as 90% for global applications.
Local type applications only show error for the No-Share mechanisms.
SP-CNN converged correctly to solution for all benchmarks and tests.
0%
20%
40%
60%
80%
100%
Crn-Detect Edge-Detect Conn-Comp Hole-Fill Rot-Detect Shadow
Pe
rce
nt
Erro
r
No-Share Avg. Error Share Avg. Error
No-Share Max. Error Share Max. Error

42
For the global applications, memory bandwidth contention decreases the ability to achieve linear scaling.
Shadow shows very poor scaling since many of the partitions converge quickly, therefore the CNN occupation time is low.
0
1
2
3
4
5
6
Crn-Detect Edge-Detect Conn-Comp Hole-Fill Rot-Detect ShadowAvg
. Exe
cuti
on
Tim
e S
pe
ed
up
CNN-P=2 (1024x1024) CNN-P=4 (1024x1024) CNN-P=8 (1024x1024)
CNN-P=2 (2048x2048) CNN-P=4 (2048x2048) CNN-P=8 (2048x2048)

43
Prefetching only provides some benefits when the number of CNN-Ps is equal to 1.
When the number of CNN-Ps scales up, than the memory bandwidth contention becomes too large, and prefetching can actually cause slowdowns.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 2 4 8
Avg
. Exe
cuti
on
Tim
e S
pe
ed
up
Number of CNN-P
Crn-Detect
Edge-Detect
Conn-Comp
Hole-Fill
Rot-Detect
Shadow

44
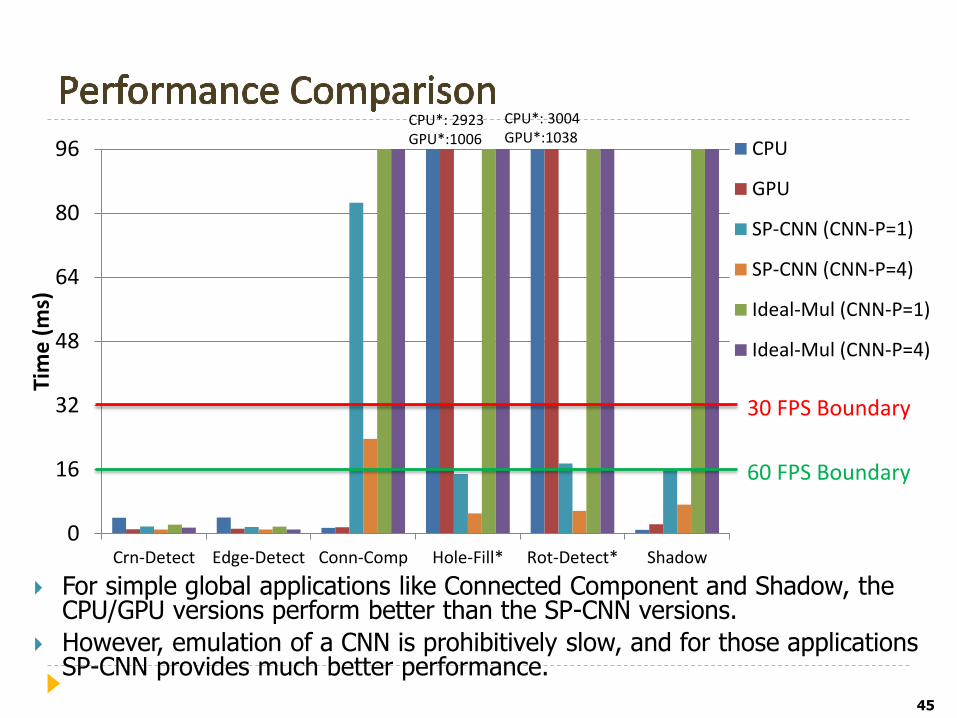
We also evaluated our SP-CNN mechanisms over CPU and GPU implementations of the benchmarks.
For two benchmarks, Hole-Filling and Rotation Detector, we could not easily develop a CPU/GPU algorithm, so we collect their timing results by emulating the CNN’s operation on the corresponding platform.
Name Model Power Frequency Technology
CPU Intel® Core ™ i5-35550
77W (TDP) 3.3 GHz 22nm
GPU NVIDIA K1 mobile
1.5W 900 MHz 28nm
SP-CNN 0.73mW per PE, 35.6 uWper node
200 MHz 45nm
45
For simple global applications like Connected Component and Shadow, the CPU/GPU versions perform better than the SP-CNN versions.
However, emulation of a CNN is prohibitively slow, and for those applications SP-CNN provides much better performance.
0
16
32
48
64
80
96
Crn-Detect Edge-Detect Conn-Comp Hole-Fill* Rot-Detect* Shadow
Tim
e (
ms)
CPU
GPU
SP-CNN (CNN-P=1)
SP-CNN (CNN-P=4)
Ideal-Mul (CNN-P=1)
Ideal-Mul (CNN-P=4)
60 FPS Boundary
30 FPS Boundary
CPU*: 2923 GPU*:1006
CPU*: 3004 GPU*:1038

46
For Connected Component and Shadow, execution time dominates over the low power consumption of SP-CNN, causing overall energy to be larger than the GPU case.
Hole-Filling and Rotation Detector do show cases where the SP-CNN can perform complex tasks at a low energy cost.
0
10
20
30
40
50
60
Crn-Detect Edge-Detect Conn-Comp Hole-Fill* Rot-Detect* Shadow
Ene
rgy
(mJ)
CPU GPU SP-CNN (CNN-P=1) SP-CNN (CNN-P=4)

Optimization: Early-Finish
Originally, each partition run for on the CNN for the entire interval time T.
We saw cases where a partition converged on the CNN before interval finished.
Rest of execution essentially does nothing.
So, introduced Early-Finish, where a partition runs on the CNN till it either converges or interval time T is reached.









![research.tetonedge.netresearch.tetonedge.net/Papers/seatechnology08.pdfCNn[0, Ryy=Rxx+Rnn] (i.e. signal plus noise), where denotes the n- variate proper complex normal distrib- ution](https://img.pdfslide.us/doc/110x75/5f62c9ac3ed3c64cbf19a153/cnn0-ryyrxxrnn-ie-signal-plus-noise-where-denotes-the-n-variate-proper.jpg)


















![[Better than pin] dynamic bin feiner asplos 2012](https://img.pdfslide.us/doc/110x75/54bc79454a795942178b4619/better-than-pin-dynamic-bin-feiner-asplos-2012.jpg)
