Embed Size (px)
Citation preview

Journal of Combinatorial Optimization, 4, 395–414, 2000c© 2000 Kluwer Academic Publishers. Manufactured in The Netherlands.
Some Results on Node Lifting of TSP Inequalities
ROBERT CARR [email protected] National Labs∗, Department of Optimization and Uncertainty Estimation, Mail Stop 1110,P.O. Box 5800, Albuquerque, NM 87185
Received July 30, 1998; Revised December 20, 1999; Accepted December 20, 1999
Abstract. We can define important classes of TSP inequalities by performing Naddef and Rinaldi’snode liftingoperation onsimpleTSP inequalities.
We present some new insights into the node lifting operation, namely that1-node liftingof cut basedinequalitiesalways has a geometric interpretation if a certainclaw-freecondition which is satisfied by most of these TSPinequalities is met. We go on to show that node lifting of thesubtour eliminationinequalities does not yield anynew inequalities.
Keywords: traveling salesman problem, lifting, node lifting, polytope, inequalities
1. Introduction
1.1. Problem definition
Given a complete undirected graphKn= (V, E)with non-negative costsc on the edges, thetraveling salesman problem(TSP) consists in finding a minimum cost Hamilton cycle inKn. This problem is also called thesymmetric traveling salesman problemto distinguish itfrom theasymmetric traveling salesman problemwhich is formulated on a directed graph.It is known to be NP-hard, see Johnson and Papadimitriou (1985).
For any edge setF ⊆ E andx ∈ RE, let x(F) denote the sum∑
e∈F xe. For any nodesetW⊂V , let δ(W) denote{uv ∈ E | u ∈ W, v /∈ W}. The usual integer programming(IP) formulation for the TSP is as follows:
minimize cx (1)
subject to x(δ(v)) = 2 for all v ∈ V, (2)
x(δ(S)) ≥ 2 for all S⊂ V, (3)
3≤ |S| ≤ n− 3,
0≤ xe ≤ 1 for all e∈ E, (4)
x integer. (5)
∗Sandia is a multiprogram laboratory operated by Sandia Corporation, a Lockheed Martin Company, for the UnitedStates Department of Energy under contract DE-AC04-94AL85000. Also supported by NSF grant DMS9509581.

396 CARR
The vectorx here is interpreted as anincidence vectorof a Hamilton cycle, i.e.,xe= 1for eache ∈ E that is in the Hamilton cycle, andxe= 0 for all other edges. Constraints(2) are called thedegree constraints, and constraints (3) are called thesubtour eliminationconstraints.
The linear programming relaxation of (1) obtained by dropping (5) is typically solved asa first step in abranch and cutalgorithm for the TSP; see Padberg and Rinaldi (1989). Thisgenerates an initialfractional solution. A cutting planefor the TSP is a valid inequalityfor the integer polytope of (1) which could be violated by fractional solutions to linearprogramming relaxations of (1). In the branch and cut algorithm, one tries to find cuttingplanes which are violated by a fractional solutionx∗ to the current linear programmingrelaxation of the algorithm. The task of finding such a violated inequality givenx∗ iscalled theseparation problem. Such an inequality can then be added to the current linearprogramming relaxation tocut off x∗.
A valid inequality is said to befacet-definingif it is not a valid equation and it also cannot be expressed as a linear combination of valid inequalities and equations, where themultipliers for the inequalities are all non-negative. Prevailing opinion has it that the bestinequalities to use in a branch and cut or a cutting plane algorithm are the facet-definingones.
1.2. Subject of paper
Many classes of facet-defining and valid inequalities of the TSP have been found; seeJunger et al. (1995). New inequalities are generated from old ones by a procedure calledlifting. In this paper, we prove some theoretical results concerning a lifting procedure callednode lifting, introduced in Naddef and Rinaldi (1992). Node lifting is a generalization of0-node lifting; see Naddef and Rinaldi (1992). Zero-node lifting will be defined in thenext section. In Section 3, we define the generalizations of1-node liftingand node lifting.Readers familiar with these results may skim these sections. The main results of this paperare in Sections 4 and 5. Recently, we have found efficient methods for separating classes ofinequalities defined by node lifting (see Carr, 1998), but these methods will not be addressedin this paper.
2. 0-node lifting
Two valid inequalities for a polyhedron are said to beequivalentif one can obtain one ofthese inequalities by adding a non-negative multiple of the other inequality and a linearcombination of equations of the polyhedron together. For the TSP, the equations are thedegree constraints. When we talk about TSP inequalities, we tend to think of equivalentinequalities as different forms expressing the same inequality. For instance, given vertex setsH, T1, T2, T3 ⊂ V satisfying certain properties, we can define athree-tooth comb inequality.But, because of the degree constraints, there is a class of equivalent inequalities which wewould describe as all being forms of a given individual three-tooth comb inequality.

NODE LIFTING OF TSP INEQUALITIES 397
2.1. 3-tooth combs
We now define the class of three-tooth comb inequalities and illustrate two different formsin which any individual three-tooth comb inequality can be expressed. Athree-tooth combconsists of ahandle H⊂ V and threeteeth Ti ⊂ V for i = 1, 2, 3 satisfying the following:
(i) The three teeth are pairwise disjoint.(ii) The handle intersects all three teeth.
(iii) None of the teeth are included in the handle.
We show a three-tooth comb in figure 1.Traditionally, a three-tooth comb inequality with handleH and teethTi , i = 1, 2, 3 is
written inclosed formas follows:
x(E(H))+3∑
j=1
x(E(Tj )) ≤ (|H | − 1)+3∑
j=1
(|Tj | − 1)− 1. (6)
This inequality is valid because the subtour elimination inequalities (in closed form)
x(E(H)) ≤ |H | − 1, (7)
x(E(Tj )) ≤ |Tj | − 1, (8)
can not all be satisfied at equality at the same time in a Hamilton cycle.Of course, there may be more than one term involving a common variablexe, which
means one must combine these like terms to obtain the final expression for this inequality.
Figure 1. A three-tooth comb.

398 CARR
An equivalent form of this three-tooth comb inequality is as follows:
x(δ(H))+3∑
j=1
x(δ(Tj )) ≥ 10. (9)
Denote the coefficient for variablexe after like terms are collected byαe. One interestingthing about this form is that these coefficients satisfy the triangle inequality; i.e., for anythree distinct verticesi , j , k ∈ V , we haveαik ≤ αij + αk j . However, if one subtracts anymultiple of the degree constraintx(δ(i )) = 2 from this inequality, then these coefficientsno longer satisfy the triangle inequality, regardless of which vertexi ∈ V is used. When thecoefficientsαe satisfy these two properties, the inequality is said to be intight triangularform, which was introduced by Naddef and Rinaldi (1992).
2.2. Tight triangular form
An inequalityαx ≥ α0 is in tight triangular (TT) form if and only if:
i) The coefficientsα satisfy the triangle inequality.ii) For all w ∈ V , there existsu, v ∈ V such thatαuv = αuw + αvw.
The following was proven by Naddef and Rinaldi (1992):
Theorem 1 (Naddef, Rinaldi). Any TSP inequality can be put uniquely, up to a constantmultiple, into tight triangular form.
Consider a facet-defining inequalityαx ≥ α0 in TT form. If none of the left hand sidecoefficients are 0 for any edge, thenαx ≥ α0 is said to be asimple inequality. DefiningH := {v1, v2, v3} andTi := {vi , yi } for i = 1, 2, 3 (see figure 1) yields a simple three-tooth comb inequality. But ifT1 = {v1, y1, j } for some vertexj ∈ V that wasn’t in theoriginal comb, but the handle and the other teeth remain the same, then the resulting combinequality would not be simple, but would be a0-node liftingof the previous inequality,where the vertexj is a 0-node lifting of vertexy1.
2.3. 0-node lifting
Let hx ≥ h0 be a facet-defining TSP inequality in TT form on the complete graphKn =(V(n), E(n)) of n vertices. Addk more vertices toV = V(n), obtaining the vertex setV(n+k).We 0-node lift nodeu to obtain the inequalityh∗x∗ ≥ h0, where:
i) h∗e = he for all e∈ E(n),ii) h∗ij = hu j ∀i ∈ V(n+k)\V(n) ∀ j ∈ V(n)\{u},
iii) h∗ij = 0 ∀i, j ∈ (V(n+k)\V(n)) ∪ {u}.

NODE LIFTING OF TSP INEQUALITIES 399
We call the vertices inV(n+k)\V(n) copiesof u. The following was shown by Naddef andRinaldi (1992).
Theorem 2 (Naddef, Rinaldi). Every facet-defining inequality for the TSP is derivablefrom a simple inequality through 0-node lifting.
It would be nice if the 0-node liftings of any simple facet-defining inequality were alwaysfacet-defining. For the simple inequalities examined so far, this has been observed to bethe case. In Naddef and Rinaldi (1992), sufficient conditions for this to hold are given.
The concept of abackbonewas used in Carr (1997) to solve the separation problem forthe 3-tooth comb inequalities and certain other classes of inequalities. Roughly speaking, abackbone of a (not necessarily simple) inequality is an ordered subset of vertices for whicha simple inequality defined on this vertex subset can be lifted to obtain the inequality inquestion. The lifting can either be a 0-node lifting, or a yet to be defined 1-node lifting ora node lifting.
One can define a class of inequalities by performing 0-node liftings on simple 3-toothcomb inequalities whose 3-tooth comb has the form shown in figure 1. However, this willnot be the class of all 3-tooth comb inequalities, as shown by the 3-tooth combs in figure 2and figure 3. To obtain the entire class of 3-tooth comb inequalities, we need to define otherkinds of liftings.
3. Other liftings
3.1. 1-node lifting
Letcx ≥ c0 be a simple inequality in TT form defined on the underlying graphKn = (V, E)whose vertex setV is {1, . . . ,n}. Suppose we wish to add noden + 1 to our underlyinggraph and this inequality. Consider choosing numbersλi for i = 1, . . . ,n such that the
Figure 2. A simple 7 node three-tooth comb.

400 CARR
Figure 3. A simple 8 node three-tooth comb.
following constraints are satisfied:
λi + λ j ≥ cij ∀ij ∈ E,(10)
λi ≥ 0 ∀i ∈ V.
Definec by
cij ={
cij for i, j 6= n+ 1,
λi for j = n+ 1.(11)
We then have the following theorem, which was proved by Naddef and Rinaldi (1992).
Theorem 3 (Naddef, Rinaldi). cx ≥ c0 is a valid TSP inequality on Kn+1.
Proof: Let a Hamilton cycleH in Kn+1 be given. Denote the incidence vector ofH byx. Denote the neighbors of noden+ 1 in H by i and j . Construct a Hamilton cycleH inKn by removing noden+ 1 from H and adding edgeij . Denote the incidence vector ofHby x. Sincecx ≥ c0 is a valid TSP inequality, we have:
cx ≥ c0.
But, we have:
c · x = cx + λi + λ j − cij ≥ cx,
because of the constraints in (10) which the numbersλi must satisfy. Combining theseinequalities, we get
c · x ≥ c0,
as required. 2

NODE LIFTING OF TSP INEQUALITIES 401
Considerλ defined by:
λi ={
cik for i 6= k,
0 for i = k.(12)
Then, withcdefined by (11), the resulting inequalitycx≥ c0 is a 0-node lifting ofcx≥ c0,with noden+ 1 being a copy of nodek. However, we shall see that we obtain more thanjust the 0-node lifted inequalities with this lifting procedure. Naddef and Rinaldi (1992)called this lifting procedure1-node liftingwhether or not it coincides with 0-node lifting.
We are only interested in those vectorsλ that are extreme points of the polyhedronPdefined by the constraints in (10), as the following theorem shows:
Theorem 4. If the vectorλ is not an extreme point of P then, with c defined by(11), theinequalitycx ≥ c0 is not facet-defining for the TSP on Kn+1.
Proof: Supposeλ is not an extreme point ofP. Then, we can expressλ by
λ = 1
2λ1+ 1
2λ2,
whereλ1, λ2 ∈ P\{λ}. For i = 1, 2, defineci usingλi in (11). Definec usingλ in (11).Then, it follows that:
c = 1
2c1+ 1
2c2.
But c1x ≥ c0 andc2x ≥ c0. Therefore,cx ≥ c0 is not facet-defining for the TSP onKn+1.2
3.2. 1-node liftings of 3-tooth combs
Consider the simple 6 node comb inequality on an underlying graphH = (W, E), whereW :={1, 2, 3, 4, 5, 6}:
x(δ{1, 2, 3})+ x(δ{1, 4})+ x(δ{2, 5})+ x(δ{3, 6}) ≥ 10. (13)
Denote this inequality bycx ≥ 10. When we definec by (11) whereλ satisfies (10), thenby Theorem 3,cx ≥ 10 is a valid TSP inequality. Due to Theorem 4, we need to consideronly the extreme pointsλ in the polyhedron defined by the constraints in (10).
Consider an extreme pointλ for (10) defined by:
λi ={
1 for i = 1, 2, 3,
2 for i = 4, 5, 6.(14)

402 CARR
The resulting inequalitycx≥ 10 is in fact an inequality for the 3-tooth comb shown infigure 2.
Suppose we now lift on this 7 node inequality, and useλ defined by:
λi ={
2 for i = 1, 2, 3,
1 for i = 4, 5, 6, 7.(15)
The resulting inequalitycx≥ 10 is then an inequality for the 3-tooth comb shown infigure 3.
We can also choose forλ one of the extreme points defined by (12). This is a 0-nodelifting, and corresponds to putting vertexn+ 1 in the same place of the three-tooth combas vertexk.
For all the cases involving the three-tooth comb inequality examined so far, 1-node liftinghas a geometric interpretation of putting the new node in a particular place in the three-toothcomb. We will find out why this is the case in Section 4.
3.3. Node lifting
As before, letcx ≥ c0 be a simple inequality in TT form defined on the underlying graphKn = (V, E) whose vertex setV is {1, . . . ,n}. Suppose this time we wish to add nodesn+ 1 throughn+ k to our underlying graph and this inequality. The underlying completegraph is nowKn+k = (Vn+k, En+k). Consider choosing coefficientscij subject to thefollowing constraints:
cij ≤ cih + cjh ∀i 6= j 6= h ∈ Vn+k,
cij = cij ∀ij ∈ E.(16)
Naddef and Rinaldi noted (1992) thatcx ≥ c0 is a valid TSP inequality onKn+k. Infact, oftentimes one can increase the right hand side by some amount and still have a validinequality. They called this lifting procedurenode lifting. For completeness, we give aproof of this here.
Theorem 5 (Naddef, Rinaldi). cx ≥ c0 is a valid TSP inequality on Kn+k.
Proof: Let a Hamilton cycleHn+k in Kn+k be given. Denote the incidence vector ofHn+k by xn+k. Do the following procedure for eachl = n + k, n + k − 1, . . . ,n + 1,starting withl = n+ k:
(i) Denote the neighbors ofl in the Hamilton cycleHl in the graphKl by i l and jl .(ii) Construct the Hamilton cycleHl−1 in the graphKl−1 by removing nodel from Hl and
adding edgei l jl . Denote the incidence vector ofHl−1 by xl−1.(iii) Decreasel by 1 and ifl ≥ n+ 1, go back to (i).
Consider the vectorsxl for eachl = n, . . . ,n+ k − 1 to have a component for each edgee∈ Kn+k by settingxl
e = 0 when it is otherwise undefined.

NODE LIFTING OF TSP INEQUALITIES 403
Let l ∈ {n+ 1, . . . ,n+ k} be given. We have that
cxl = cxl−1+ (ci l l + cjl l − ci l jl
).
Thus, by constraints (16), it follows that
cxl ≥ cxl−1.
Taking the corresponding result for eachl ∈ {n+1, . . . ,n+k}, and combining them yields
cxn+k≥ cxn.
Sincecx ≥ c0 is a valid TSP inequality onKn, andc is constrained to coincide withc onthis graph, we have that
cxn = cxn ≥ c0.
Combining these inequalities, we get
cxn ≥ c0,
as required. 2
Once again, we are only interested in those vectorsc that are extreme points of the poly-hedronP defined by the constraints in (16), as the following theorem shows:
Theorem 6. If the vectorc is not an extreme point of P, then the inequalitycx ≥ c0 is notfacet-defining for the TSP on Kn+k.
Proof: This follows from the same argument as in Theorem 4. 2
Whenever the right hand side can not be increased, call the inequalitycx ≥ c0 on Kn+k
that we obtained fromcx ≥ c0 on Kn thesimple node liftingof cx ≥ c0. Hence, simplenode lifting could be 0-node lifting or more generally 1-node lifting. It may also yieldsomething distinct from these two types of liftings, although we do not yet know of anexample of this. An example of node lifting which is not simple node lifting is callededgecloning, and can be found in Naddef and Rinaldi (1992). In this paper, we restrict ourselvesto simple node lifting.
3.4. Lifting polyhedra
We called the special case of node lifting where the right hand side remained the samesimple node lifting. The process of starting with a TSP inequality in TT form and repeatedlychoosingλ satisfying (10) each time we wish to add a node to our inequality issequential

404 CARR
1-node liftingor just sequential node lifting. Naddef and Rinaldi (1992) proved that theright hand side will not increase when the resulting inequality is facet-defining.
Theorem 7 (Naddef, Rinaldi). If cx≥ c0 is a facet-defining 1-node lifting of a tighttriangular TSP inequality cx≥ c0, thenc0 = c0.
We can see that by performing sequential 1-node lifting on primitive 3-tooth comb inequali-ties whose 3-tooth combs are of the form of figure 1, we can obtain all three-tooth combinequalities. Call the polyhedron having constraints (10) from which we chooseλ whenperforming sequential 1-node lifting thesequential lifting polyhedron.
There is also the simple node lifting which produces the inequalitycx≥ c0 on Kn+k fromcx ≥ c0 via the constraints in (16). Call this kind of liftingsimultaneous node lifting. Wecan see that simultaneous node lifting subsumes the sequential node lifting case. Call thepolyhedron defined by (16) thesimultaneous lifting polyhedron.
Call the sequential or simultaneous node liftings which correspond to extreme points ontheir respective polyhedraextreme liftings. In the next section, we show some properties ofsequential and simultaneous node liftings.
4. Properties of node lifting
For all the cases involving the three-tooth comb inequality examined so far, 1-node liftinghas a geometric interpretation of putting the new node in a particular place in the three-tooth comb. We will show that all 1-node liftings of a three-tooth comb inequality have thisgeometric interpretation, and give sufficient conditions for when all the 1-node liftings of aTT inequality have a similar geometric interpretation. As a result, we see easily that (14),(15), and (12) are the only kinds of 1-node liftings for the three-tooth comb.
4.1. A theorem about cut based inequalities
Call a TT inequalitycx ≥ c0 cut basedif we have a collection{Hi } of subsets ofV suchthat
cx =∑
i
αi x(δ(Hi )), (17)
whereαi > 0 for all i . The three tooth comb inequality is thus a cut based inequality. Inthe cut based representation of an inequality, we may complement any shoreHi . For oursubsequent convenience, we complement the appropriate shores so that there are no shoresHi andHj in the cut based representation such thatHi ∪ Hj = V . Call such a cut basedrepresentation aproper representation.
By choosing 3 of the shoresHi in (17) and possibly complementing some of these 3, wemay produce aclaw structure, as shown in figure 4. In other words, a claw is a set of 3shores, any two of which have non-empty intersection, and for any two of which, there is avertex which is not in their union.

NODE LIFTING OF TSP INEQUALITIES 405
Figure 4. A claw.
One can never get a claw by complementing the shoresHi of the usual cut based re-presentation of any bipartition inequality (defined in Boyd and Cunningham, 1991), andin particular any comb or clique tree inequality. The same holds for binested inequalities,defined in Naddef (1992). If there exists a cut based representation where this is the case,we say that the given inequalityhas no claws. We prove some lemmas in preparation forour theorem.
Supposecx ≥ c0 is a cut based inequality. Consider the following linear program for anarbitrary non-negative objective functionb:
minimize b · λsubject to
λi + λ j ≥ cij ∀ij ∈ E,
λi ≥ 0 ∀i ∈ V.
(18)
If there is a negativebi , then (18) is an unbounded linear program. Without loss of generality,let∑
i∈V bi = 2.Consider the proper representation
cx =∑i∈I
αi x(δ(Hi )). (19)

406 CARR
We construct our proposed optimal solutionλ∗ to (18) algorithmically as follows. For eachi ∈ I , define
Ti =Hi if
∑j∈Hi
bj > 1,
V\Hi otherwise.(20)
Then do the following.
(i) Start withλ∗j = 0 for all j ∈ V .(ii) For eachi ∈ I , addαi to eachλ∗j for which j ∈ V\Ti .
We now show the following.
Lemma 8. The solutionλ∗ constructed above is feasible for(18).
Proof: For eachi ∈ I and j ∈ V , define
tij ={
0 for j ∈ Ti ,
1 otherwise.(21)
We then have
λ∗j =∑i∈I
αi tij (22)
for each j ∈ V . Let jk ∈ E. DefineI jk by
I jk := {i ∈ I | jk ∈ δ(Hi )}.
Then we have
λ∗j + λ∗k =∑i∈I
αi (tij + tik) ≥∑i∈I jk
αi = cjk. (23)
Hence,λ∗ is a feasible solution to (18). 2
We now show thatλ∗ is a “geometric” 1-node lifting whenevercx ≥ c0 has no claws.
Lemma 9. The1-node liftingλ∗ of the cut based TT inequality cx≥ c0 has a geometricinterpretation of putting a new node in the intersection of a specified set of intersectingshores Hi in a proper representation(and no such other shores Hj ) unless cx≥ c0 has aclaw.
Proof: Denote the (sequential) 1-node lifted inequality that results from the sequentiallifting polyhedron pointλ∗ by cx ≥ c0. Thus, withn+ 1 being the new node,cj,n+1 = λ∗j

NODE LIFTING OF TSP INEQUALITIES 407
for all j ∈ V . DefineJ := {i ∈ I | Ti = Hi }. We now show thatcx ≥ c0 can be obtainedby the proper representation (19) where noden+ 1 is placed in
⋂i∈I Ti , thus yielding the
identity:
cx =∑i∈J
αi x(δ(Hi ∪ {n+ 1}))+∑
i∈I \Jαi x(δ(Hi )). (24)
Define the right hand side of (24) ascx. We wish to show thatc = c. For jk ∈ E andj , k 6= n+ 1, clearlycjk = cjk. But, we have that
cj,n+1 =∑
i∈I j,n+1
αi =∑
{i∈I | j /∈Ti }αi =
∑i∈I
αi tij = λ∗j ,
showing thatc = c.We will now show that
⋂i∈I Ti 6= ∅. The new noden+ 1 can be added to shoresTi and
Tj only if Ti andTj already intersect because of (20) and∑
i∈V bi = 2. Moreover, ifn+ 1is added to shoresTi , Tj , andTk and there are no claws, then since these shores pairwiseintersect, but their pairwise unions are neverV and there are no claws, it follows that oneof these shores is contained in another one, sayTj ⊂ Tk, and as a resultTi ∩ Tj ∩ Tk 6= ∅.For more than three sets, this non-empty intersection property follows inductively. Supposen+ 1 is added to shoresTi1, Ti2, . . . , Tir . Then without loss of generality, we can stipulatethatTir−1 ⊂ Tir . By induction we know that
r−1⋂j=1
Ti j 6= ∅.
Therefore,
r⋂j=1
Ti j 6= ∅,
which completes the induction proof that⋂
i∈I Ti 6= ∅. Hence, the required geometricinterpretation of this 1-node lifting is satisfied. 2
Lemma 10. The solutionλ∗ to (18) is optimal among solutions to(18) having the geo-metric interpretation stated in the previous lemma.
Proof: It follows from (22) that
b · λ∗ =∑i∈I
αi b(V\Ti ).
One can similarly see that whenever there is the geometric interpretation forλ′ correspondingto placing noden+ 1 in
⋂i∈I T ′i , whereT ′i ∈ {Hi ,V\Hi }, that
b · λ′ =∑i∈I
αi b(V\T ′i ).

408 CARR
Hence, by (20), it is clear thatλ∗ is optimal among all extreme points with a geometricinterpretation. 2
We now have the following theorem.
Theorem 11. The solutionλ∗ is optimal for(18) for all possible choices of an objectivefunction b if and only if cx≥ c0 has no claws.
Proof: The dual to (18) is as follows:
maximize c · wsubject to
w(δ(i )) ≥ bi ∀i ∈ V,
wij ≥ 0 ∀ij ∈ E.
(25)
Suppose there existed a dual feasible vectorw∗ satisfying the complementary slacknessconditions listed below:
(i) λ∗i > 0⇒ w∗(δ(i )) = bi ∀i ∈ V ,(ii) λ∗i + λ∗j > cij ⇒ w∗ij = 0 ∀ij ∈ E.
Then complementary slackness would imply thatλ∗ andw∗ were optimal solutions for (18)and (25) respectively. Conversely, if there were no such dual feasible vectorw∗, thenλ∗
would not be optimal for (18).We see from where (23) is slack that such a vectorw∗ is constrained by condition (ii) to
be 0 on precisely the edges in the set⋃i∈I
E(V\Ti ). (26)
We want to formulate the existence of such a solutionw∗ as a fractional b-matching fea-sibility question. We ideally wantbj to be the demand at vertexj for each j ∈ V , due tocondition (i). However, the existence of anl ∈ V such thatλ∗l = 0 would allow the demandat nodel to be less thanbl , since condition (i) would not apply tol . Hence, the solutionλ∗
is optimal for (18) if and only if the fractional b-matching problem with the constraints
w∗e = 0 ∀e∈⋃i∈I
E(V\Ti ),
w∗(δ(i )) = bi ∀i ∈ V such thatλ∗i > 0,
w∗(δ(i )) ≤ bi ∀i ∈ V such thatλ∗i = 0,
(27)
has a feasible solution. So, let us consider two cases.
Case 1.λ∗l > 0 for all l ∈ V .Note that because of (20), for noi ∈ I do we have
b(V\Ti ) > b(Ti ), (28)

NODE LIFTING OF TSP INEQUALITIES 409
Suppose that for somel ∈ V , we had
bl > b(V\{l }).
Then the optimality ofλ∗ among extreme points with a geometric interpretation wouldclearly imply thatλ∗l = 0. Hence, for nov ∈ V do we ever have
bv > b(V\{v}). (29)
Either (28) or (29) would cause our fractional b-matching problem to be infeasible if itever occured. In Christopher (1997), it is proved that if the only edges not allowed in thefractional b-matching are those in (26) and that (28) and (29) never occurred, then thefractional b-matching problem having the constraints
w∗e = 0 ∀e∈⋃i∈I
E(V\Ti ),
w∗(δ(i )) = bi ∀i ∈ V,(30)
is always feasible if and only if the set of shores{V\Ti | i ∈ I } does not have a claw(where claws formed by complementing some of these shores do not count in this case).A feasible such fractional b-matching pointw∗ would imply thatλ∗ was optimal for(18). Conversely, no such feasible fractional b-matching pointw∗ for (30) would implythatλ∗ was not optimal for (18) even though by constructionλ∗ is optimal among thoseextreme points of (18) that have a geometric interpretation. One must in fact show thatthis infeasibility is possible even whenb satisfiesb(V\Ti ) ≤ 1 for all i ∈ I , but this iseasy to do.
An example of when (30) is infeasible is shown in the claw in figure 5. The shoresshown here areV\T1, V\T2, andV\T3. The numbers in figure 5 are theb-values of these4 nodes. In this example, the demand of 1/8 can not be met. We will learn in Case 2 thatfigure 5 is a legitimate example for when (27) is infeasible sinceλ∗i must be greater than0 for all nodesi in this claw.
Case 2. There exists anl ∈ V such thatλ∗l = 0.We see by (22) that then
l ∈⋂i∈I
Ti . (31)
Suppose that there is a claw in{V\Ti | i ∈ I }. Definebi by the values shown in figure 5for nodesi in the claw, andbi := 0 for all other nodes. By (31), we haveλ∗i > 0 for allnodesi in the claw. Hence, (27) is an infeasible b-matching problem for the same reasonas before.
Suppose that there are no claws in{V\Ti | i ∈ I }. Defineb′ by
b′i ={
bi for λ∗i > 0,
min{bi , b(V\{i })} otherwise.

410 CARR
Figure 5. An infeasibity arising from a claw.
Sincebi > b(V\{i }) for at most onei ∈V , and such a nodei would be in⋂
i∈I Ti , itfollows thatb′ satisfies (28) and (29), which means the fractionalb′-matching problem(30) is feasible. Hence, the corresponding fractional b-matching problem (27) is feasible.Thus,λ∗ is optimal, and this theorem follows. 2
Putting these lemmas and this theorem together results in the following theorem.
Theorem 12. The only extreme1-node liftings of a cut based TT inequality cx≥ c0
are those having a geometric interpretation of putting the new node in the intersectionof a specified set of intersecting shores Hi in a proper representation(and no such othershores Hj ) if and only if cx≥ c0 has no claws.
Proof: One can get all of the extreme 1-node liftings ofcx ≥ c0 by finding an extremepoint optimal solution to (18) for all possible choices ofb. We know from the lemmas thatfor any choice ofb, the solutionλ∗ to (18) is optimal among those solutions having ourgeometric interpretation. Theorem 11 shows thatλ∗ is optimal for (18) for all possiblechoices ofb if and only if cx ≥ c0 has no claws. 2
4.2. Our present knowledge
There are several things to be noted here. We will define in the next section a cut-basedinequality with claws. The 1-node and simultaneous node liftings of such an inequality may

NODE LIFTING OF TSP INEQUALITIES 411
not have the geometric interpretation stated in Theorem 12. If there are any non cut-basedinequalities, this geometric quality of 1-node lifting would be absent for these inequalitiesas well. On the other hand, even if we exclude non-cut based TSP inequalities and cut-basedTSP inequalities with claws, there may be simultaneous node liftings even of the three-toothcomb which do not have the geometric interpretation stated in Theorem 12. Clearly, 1-nodelifting (or sequential node lifting) is a special case of (simultaneous) node lifting. It is notclear, however, that simultaneous node lifting ever produces an inequality which could notalso be obtained by sequential node lifting. The only thing in this respect that the authordoes know at present is that simultaneous node lifting of the subtour elimination constraintsdoesn’t produce any other inequalities, as the theorem in the next section shows.
4.3. A theorem about subtour elimination inequalities
We have the following theorem.
Theorem 13. The simultaneous node liftings of a subtour elimination inequality are allsubtour elimination inequalities.
Proof: The simple subtour elimination inequality for which 1 and 2 are on opposite shoresis an inequality on only the 2 node graphK2, and is merelyx12 ≥ 2. Suppose all the 0-nodeliftings of this inequality (subtour elimination inequalitiesx(δ(H))≥ 2 where 1∈ H , 2 /∈ H )were satisfied by a vectorx∗. By the max-flow min-cut theorem, when capacities on thearcs (i , j ) and (j , i ) are both given byx∗ij for each edgei j ∈ E, there exists a feasible 1-2flow f in this directed graph of 2 units. Decompose this flowf into r flows, where thek-thflow has volumeαk and is along a directed 1-2 pathPk for k = 1, . . . , r , with
∑rk=1 αk ≥ 2,
and it is assumed without loss of generality that there are no cycles of flow. Letcx ≥ 2be any simultaneous node lifting ofx12 ≥ 2. Definec(i, j ) = c( j,i ) := cij for each edgee∈ E. Becausecx ≥ 2 is a simultaneous node lifting ofx12 ≥ 2, we have for each pathPk
that
c(E(Pk)) ≥ c12 = 1.
We thus have
cx∗ ≥ c · f =r∑
k=1
αkc(E(Pk)) ≥r∑
k=1
αk ≥ 2.
Therefore,cx≥ 2 is implied by the set of subtour elimination inequalitiesx(δ(H)) ≥ 2such that 1∈ H , 2 /∈ H . Hence, this Theorem follows. 2
5. A 1-node lifting of Petersen inequality
We are now ready to examine a non-geometric 1-node lifting of a cut based inequality withclaws. Call the subgraphG = (V, E′) of the complete graphKn = (V, E), Hamiltonian

412 CARR
if it contains a Hamilton cycle. CallG hypo-Hamiltonianif G is non-Hamiltonian, but thegraphG−v obtained by removing any vertexv is always Hamiltonian. For every hypo-Hamiltonian graphG, there is a correspondinghypo-Hamiltonianinequality. The hypo-Hamiltonian inequalities were formulated and proven to be facet-defining by Gr¨otschel(1980). The hypo-Hamiltonian inequality for a hypo-Hamiltonian graphG is
x(E\E′) ≥ 1.
This is a valid inequality because every Hamilton cycle must use an edge that is not in thehypo-Hamiltonian graphG. In tight triangular form, the hypo-Hamiltonian inequality forG is
x(E′)+ 2x(E\E′) ≥ |V | + 1. (32)
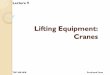
One such hypo-Hamiltonian graph is thePetersen graph, which is shown in figure 6.The right hand side of thePetersen inequalitywhen expressed as in (32) is 11. Denote
this Petersen inequality bypx≥ 11. This author suspected that the Petersen inequality wasnon-cut based, but it was pointed out to me that it in fact is a cut based inequality by a handcalculation of one of the referees. However, it does have claws. With
H1 = {1, 3, 6, 7, 8} H2 = {2, 4, 7, 8, 9} H3 = {3, 5, 8, 9, 10}H4 = {1, 4, 6, 9, 10} H5 = {2, 5, 6, 7, 10} H6 = {1, 2, 3, 4, 5},
Figure 6. The Petersen graph.

NODE LIFTING OF TSP INEQUALITIES 413
we have
p · x =6∑
i=1
1
2x(δ(Hi )).
One can obtain all the 0-node liftings of the Petersen inequality by the sequential 1-nodeliftings indicated by (12). But, we will show that the following is also an extreme point ofthe sequential lifting polyhedron:
λ∗i ={
1/2 i = 9, 10,
3/2 otherwise.(33)
Denote the resulting 1-node lifted inequality bypx ≥ 11. One can easily see thatλ∗ isan extreme point since the objective functionλ9 + λ10+ λ2 is minimized uniquely byλ∗,and given thatλ∗9 = λ∗10 = 1
2 andλ∗2 = 32 and the constraints onλ imposed by the Petersen
inequality, we must haveλ∗i ≥ 3/2 for all i 6= 2, 9, 10.This analysis leads us to define the subtour elimination pointx∗ shown in figure 7. We
have thatpx∗ = 1023 < 11 even thoughx∗ satisfies all of the 0-node liftings of the Petersen
inequality.
Figure 7. The subtour pointx∗.

414 CARR
Acknowledgments
I give thanks to R. Ravi for his constructive comments about this paper. I also thank thereferee who, through some effort, determined that the Petersen inequality was actually acut-based inequality.
References
S.C. Boyd and W.H. Cunningham, “Small travelling salesman polytopes,”Mathematics of Operations Research,vol. 16, pp. 259–271, 1991.
R. Carr, “Separating clique trees and bipartition inequalities having a fixed number of handles and teeth inpolynomial time,”Mathematics of Operations Research, vol. 22, no. 2, pp. 257–265, 1997.
R. Carr, “Separation and lifting of TSP inequalities,” Technical Report, Sandia National Labs, 1998.G. Christopher, Ph.D. Thesis, Department of Mathematics, Carnegie Mellon University, 1997.M. Grotschel, “On the monotone symmetric travelling salesman problem: Hypohamiltonian/hypotraceable graphs
and facets,”Mathematics of Operations Research, vol. 5, pp. 285–292, 1980.D.S. Johnson and C.H. Papadimitriou, “Computational complexity,” inThe Traveling Salesman Problem, E.L.
Lawler, J.K. Lenstra, A.H.G. Rinnooy Kan, and D.B. Shmoys (Eds.), John Wiley & Sons, Chichester, 1985,pp. 37–85.
M. Junger, G. Reinelt, and G. Rinaldi, “The traveling salesman problem,” inHandbooks in OR & MS, vol. 7, M.O.Ball et al. (Eds.), Elsevier Science B.V., 1995.
D. Naddef, “The binested inequalities for the symmetric traveling salesman polytope,”Mathematics of OperationsResearch, vol. 17, no. 4, Nov., 1992.
D. Naddef and G. Rinaldi, “The graphical relaxation: A new framework for the symmetric traveling salesmanpolytope,”Mathematical Programming, vol. 58, pp. 53–88, 1992.
M. Padberg and G. Rinaldi, “A branch-and-cut approach to a travelling salesman problem with side constraints,”Management Sci., vol. 35, no. 11, pp. 1393–1412, 1989.