Embed Size (px)
Citation preview
Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
Some Practical Issues in Deep-Time Multiplexing
Michael PeñaDefense Experimentation and Stockpile Stewardship
National Security Technologies, LLC
This work was done by National Security Technologies, LLC, under
Contract No. DE-AC52-06NA25946 with the U.S. Department of Energy.
DOE/NV/25946--2857

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
► Deep-time multiplexing
■ Conceptual design
► Index of refraction variations
■ Wavelength
■ Temperature
► State of Polarization
■ Stability
■ Control
-2-
Outline

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-3-
Deep-Time Approach ROADDM
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
800μs record at detector
= 10km SMF (50us)
16 signals fromMPDV,
2 per ITU21-35
~150km SMF
DW
DM
DW
DMNS
2x2
DW
DM
2x1 PD
80km SMF
SCOPE
8 Local Oscillators1 per ITU21-35
Corning® SMF-28® Ultra
αmax ≤ 0.18 dB
km
Dλ ≤ 18.0 𝑝𝑠
(nm·km)
Neff : 1.4682
Pol. Ctrl
► Reconfigurable Optical Add Drop “Delay” Module

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
• Index of Refraction, n(λ)
• Phase Velocity, 𝑣𝑝𝜔
𝑘
𝑐𝑜
𝑛(λ)
• Group Velocity, 𝑣𝑔𝑑𝜔
𝑑𝑘; 𝑑λ=
−λ2
2𝜋𝑐𝑜𝑑𝜔
𝑐𝑜
𝑛(λ) 1 −λ𝑛
𝑑𝑛
𝑑λ
−1
• Group Velocity Dispersion, GVD𝑑2𝑘
𝑑𝜔2λ3
2𝜋𝑐𝑜2
𝑑2𝑛
𝑑λ2
• Group Delay, 𝜏𝑔 =𝐿
𝑣𝑔=𝑑𝜑
𝑑𝜔
𝑑𝜑
𝑑𝜔=𝑑 𝑘𝐿
𝑑𝜔
𝑛
𝑐𝑜1 −λ𝑛
𝑑𝑛
𝑑λ 𝐿
• Group Delay Dispersion, GDD𝑑𝜏𝑔
𝑑𝜔=𝑑2(𝑘𝐿)
𝑑𝜔2λ3
2𝜋𝑐𝑜2
𝑑2𝑛
𝑑λ2 𝐿
-4-
Wavelength-Dependent Index of Refraction
18𝑝𝑠
𝑛𝑚 ∙ 𝑘𝑚× 10[𝑘𝑚] × 1560.61 − 1549.32 [𝑛𝑚]
= 2.032𝑛𝑠
18𝑝𝑠
𝑛𝑚 ∙ 𝑘𝑚× 150[𝑘𝑚] × 1560.61 − 1549.32 [𝑛𝑚]
= 30.483𝑛𝑠

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-5-
Modulation Phase Shift Dispersion Measurement
Tunable
Laser
Intensity
ModulatorPD
Sine Wave
Generator
Compare phase
DUT
fm
∆𝜏𝑔 𝜆 =𝜑 𝜆 − 𝜑 𝜆𝑟360°
1
𝑓𝑚
𝐷 𝜆 =1
𝐿
𝑑 ∆𝜏𝑔 𝜆
𝑑𝜆=
1
360°𝐿𝑓𝑚
𝑑𝜑 𝜆
𝑑𝜆
Measurement setup for fiber chromatic dispersion
Δτ(λ) = 0.00029598λ2 – 0.7348λ + 440.16
Δτ(1560.61nm) - Δτ(1549.32nm) = 1.97305ns
𝐷λ =1973.05𝑝𝑠
11.29𝑛𝑚∙10𝑘𝑚= 17.476
𝑝𝑠
𝑛𝑚∙𝑘𝑚

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-6-
Temperature-Dependent Index of RefractionLUNA Technical Note EN_FY1406,
∆𝜏
𝜏=1
𝐿
𝜕𝐿
𝜕𝑇∆𝑇 +1
𝑛
𝜕𝑛
𝜕𝑇∆𝑇 = 𝛼𝐿 + 𝛼𝑛 ∆𝑇
αL : thermal expansion coeff 𝛼𝑛 : thermo-optic coeff0.55 x 10-6 °C-1 ~7.0 to 9.0 x 10-6 °C-1
(7.5 x 10-6 used below)
385𝑝𝑠
℃ ∙ 10𝑘𝑚∙ 15 𝑑𝑒𝑙𝑎𝑦𝑠 = 5.78
𝑛𝑠
℃
210𝑝𝑠
℉ ∙ 10𝑘𝑚∙ 15 𝑑𝑒𝑙𝑎𝑦𝑠 = 3.15
𝑛𝑠
℉
Observed temps.
y=0.393x -8.644
y=0.3798x -8.769

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
In situ Cross-Timing Mark
-7-
XT-mark
XT-mark in each time window
Follow temp-time fluctuations
XT-mark inherently same λ as
velocity record
Single XT-mark for 16 records (only
8 shown)
Temperature fluctuations ~1–16 ns
Temp gradients = inconsistent 𝛿t Compounded effect deeper in time
𝑛=1
15
𝛿𝑡𝑖𝛿𝑡𝑖
DW
DM
DW
DM
2x1

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
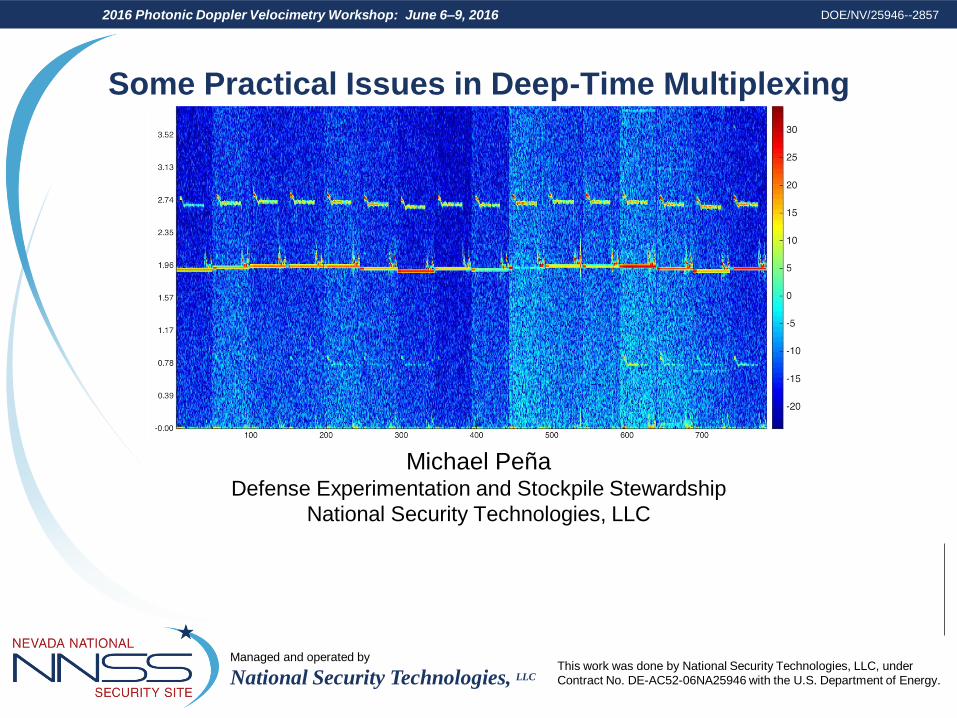
Static Signal Fluctuations
-8-
• All channels seeing same
probe
• 30 m jumpers to firing
chamber
• Shot-to-shot variability
~10 dB

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
► Real single-mode fibers exhibit elliptical birefringence due to
■ Deviations of core shape from circularity
■ Lateral compression
■ Residual twist
■ Bending
-9-
Polarization/Induced Birefringence
y
x
y
x
F
F
Core ellipticity Compression Twist Bending
Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-10-
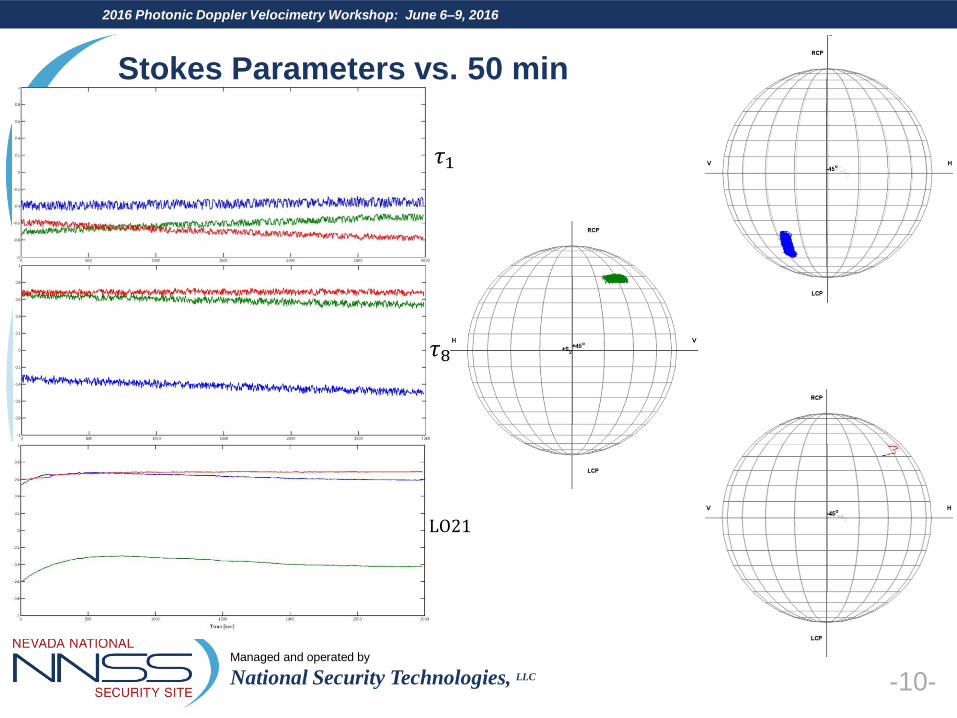
Stokes Parameters vs. 50 min
𝜏8
𝜏1
LO21

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-11-
Tau Windows 1 through 8
(1 millisecond)

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-12-
Tau Windows 9 through 16
(1 millisecond)Stressed Fiber?
Increasing variations

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
Local Oscillator SOP
(1 millisecond)
-13-

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-14-
Aligning Local Oscillators with Signals
𝑄𝑊1 =𝜋
2𝑄𝑊2 =
5𝜋
3𝑄𝑊3 =
𝜋
3𝑄𝑊4 =
𝜋
3
Dot Products (Signal,LO)
𝜏1 = 0.3546 𝜏9 = 0.8797 ITU21
𝜏2 = 0.4207 𝜏10 = 0.3000 ITU23
𝜏3 = −0.1510 𝜏11 = 0.7326 ITU25
𝜏4 = 0.5092 𝜏12 = 0.7100 ITU27
𝜏5 = −0.3259 𝜏13 = 0.8980 ITU29
𝜏6 = 0.2449 𝜏14 = 0.5950 ITU31
𝜏7 = 0.8789 𝜏15 = 0.2652 ITU33
𝜏8 = −0.8642 𝜏16 = 0.7807 ITU35
−1 ≤ 𝑆𝑖𝑔𝑛𝑎𝑙 ∙ 𝐿𝑂 ≤ 1● Signal ▲ Local Oscillator

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-15-
Polarization Controllers – Fiber Squeezers (EPC-300)
Linear Horizontal
𝑆𝑜𝑢𝑡 = 𝑀0°45°0°45°
100
Linear +45
𝑆𝑜𝑢𝑡 = 𝑀0°45°0°45°
010
45°45°
0°0°
Right Circular
𝑆𝑜𝑢𝑡 = 𝑀0°45°0°45°
001
► Not all inputs are affected equally!

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-16-
Polarization Controllers – PolarRITE (VarRotQWP)
Linear Horizontal
𝑆𝑜𝑢𝑡 = 𝑀𝜃,𝜑
100
Right Circular
𝑆𝑜𝑢𝑡 = 𝑀𝜃,𝜑°
001
Linear +45
𝑆𝑜𝑢𝑡 = 𝑀𝜃,𝜑
010

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
-17-
Polarization Controllers 3-Paddle (RQW-RHW-RQW)
Linear +45
𝑆𝑜𝑢𝑡 = 𝑀𝜃1,𝜃2,𝜃3
010
Linear Horizontal
𝑆𝑜𝑢𝑡 = 𝑀𝜃1,𝜃2,𝜃3
100
Right Circular
𝑆𝑜𝑢𝑡 = 𝑀𝜃1,𝜃2,𝜃3
001

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
► Solution to current systems will need to be:
■ Single- or few-point solution
■ Endless tracking (i.e., no reset or operation discontinuity)
■ Feedback loop, detection and compensation
● System time constants ~seconds
● Dynamic excursions from experiment
■ Practical
● Ease of use
● Cost
● Physical footprint
► Looking at all-optical solutions
■ Based on nonlinear interactions
● Raman, four-wave mixing, SBS
-18-
Still a work in progress

Managed and operated by
National Security Technologies, LLC
2016 Photonic Doppler Velocimetry Workshop: June 6–9, 2016
► Timing issues
■ Wavelength- and temperature-dependent Index of Refraction
● ~ 21𝑝𝑠
℉∙𝑘𝑚/ ~38
𝑝𝑠
℃∙𝑘𝑚
■ In situ timing marks follow time variations
► State of Polarization
■ Each time window will have unique state
■ SOP distribution increases with time
■ SOP relatively stable over ~1 hr and ~100s μs
■ Polarization controllers effect SOPs differently
Questions?
-19-
Conclusion





























