Embed Size (px)
Citation preview
Some Fundamentals of Stability Theory
Aaron Greenfield
Outline
I. Introduction + Motivation
II. Definitions
III. Theorems
IV. Techniques for Lyapunov Function Construction
Basic Notion of Stability
StabilityAn important property of dynamic systems
Stability. . .An “insensitivity” to small perturbationsPerturbations are modeling errors of system, environment, noise
F=0. OK
Basic Notions of Stability
StabilityAn important property of dynamic systems
Stability. . .An “insensitivity” to small perturbationsPerturbations are modeling errors of system, environment
F=0. OK
Basic Notions of Stability
StabilityAn important property of dynamic systems
Stability. . .An “insensitivity” to small perturbationsPerturbations are modeling errors of system, environment
F=0. OK
StabilityAn important property of dynamic systems
Stability. . .An “insensitivity” to small perturbationsPerturbations are modeling errors of system, environment, unmodeled noise
F=0. OK
Basic Notions of Stability
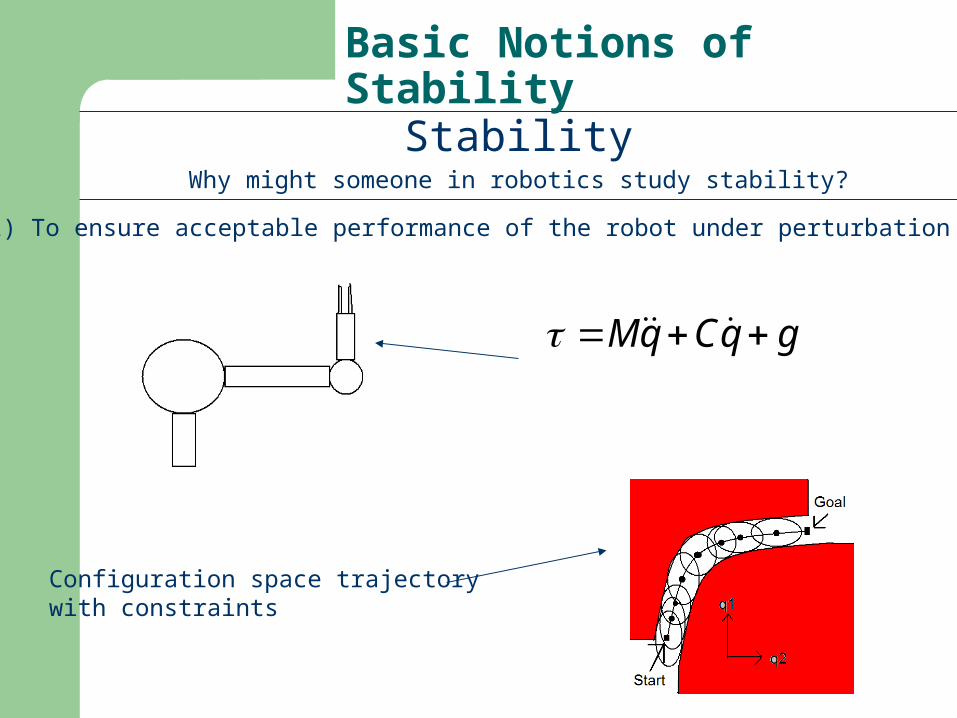
StabilityWhy might someone in robotics study stability?
Basic Notions of Stability
(1) To ensure acceptable performance of the robot under perturbation
gqCqM
Configuration space trajectorywith constraints
Some Notation
||||
),;( 00
x
txtp
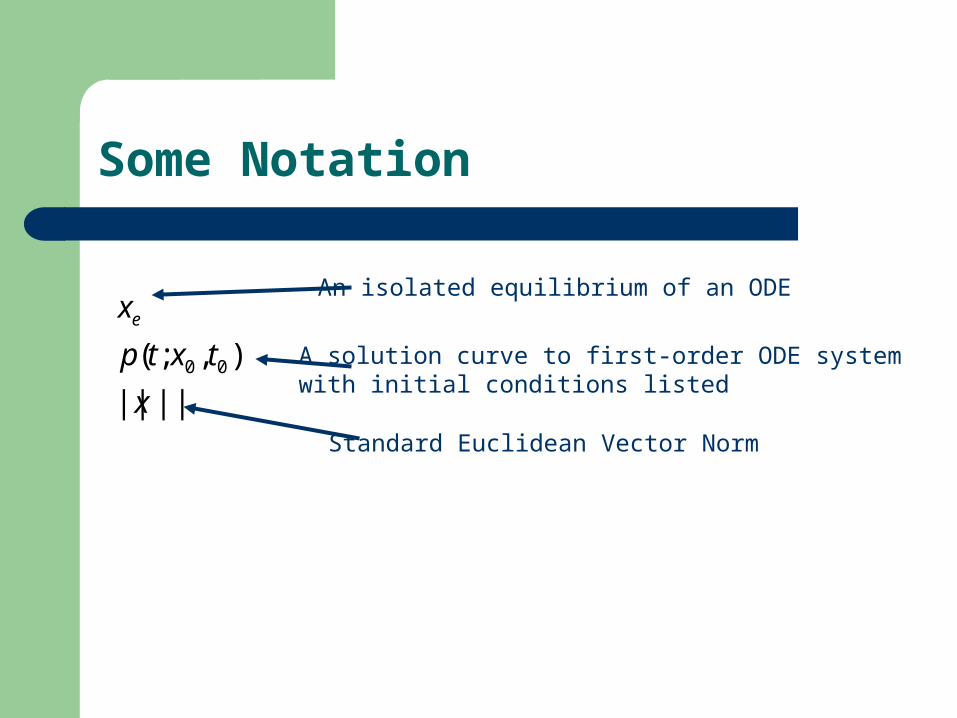
xeAn isolated equilibrium of an ODE
A solution curve to first-order ODE systemwith initial conditions listed
Standard Euclidean Vector Norm
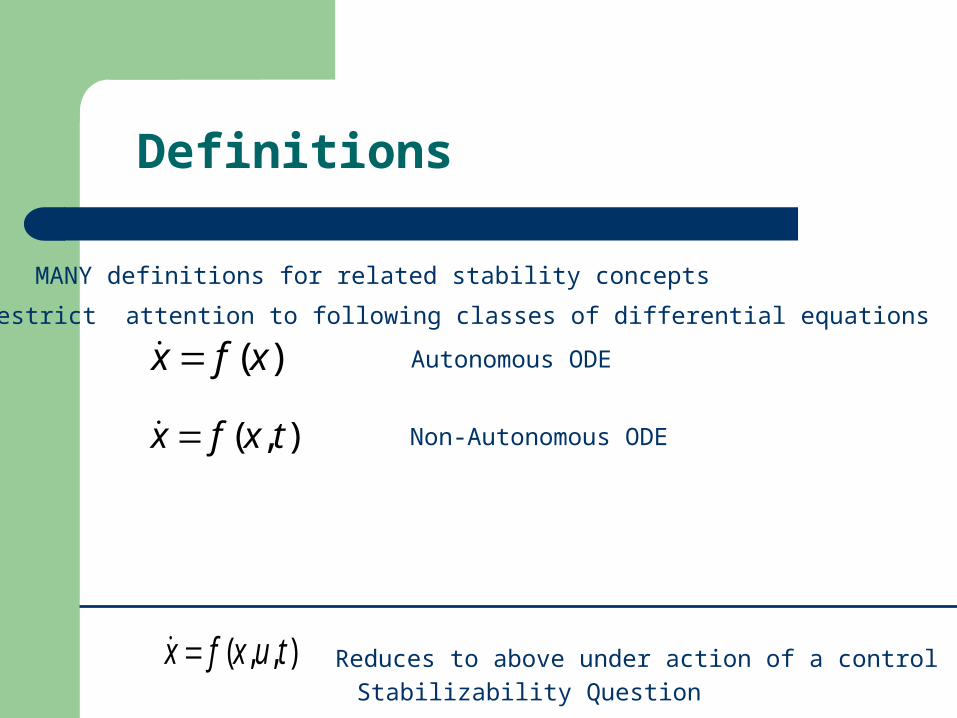
)(xfx
MANY definitions for related stability concepts
),( txfx
Definitions
),,( tuxfx Reduces to above under action of a control
Restrict attention to following classes of differential equations
Autonomous ODE
Non-Autonomous ODE
Stabilizability Question
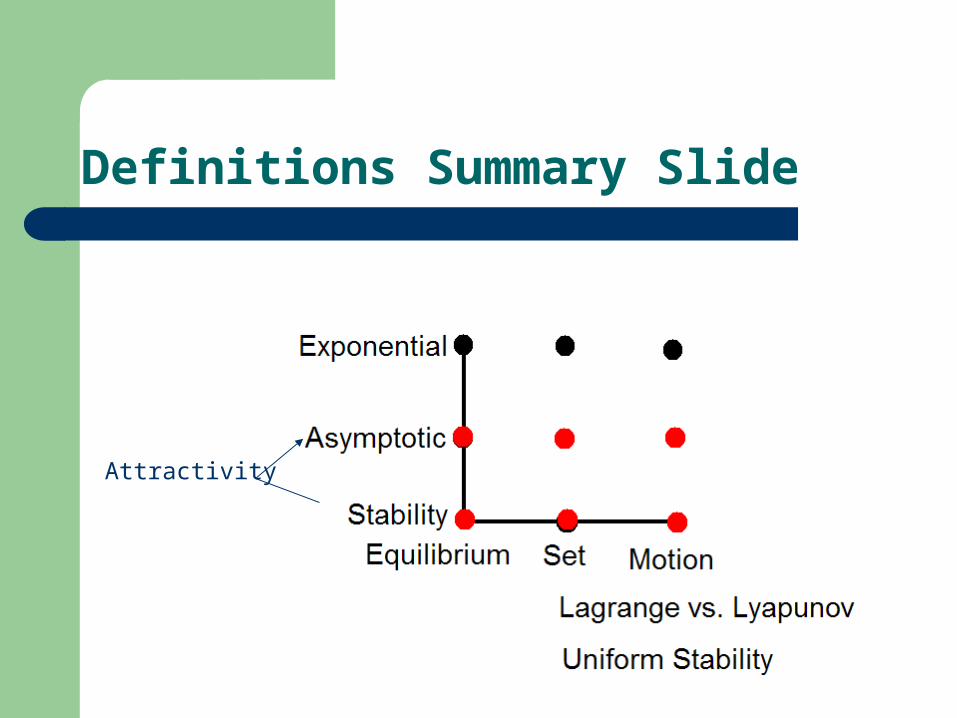
Definitions Summary Slide
Attractivity
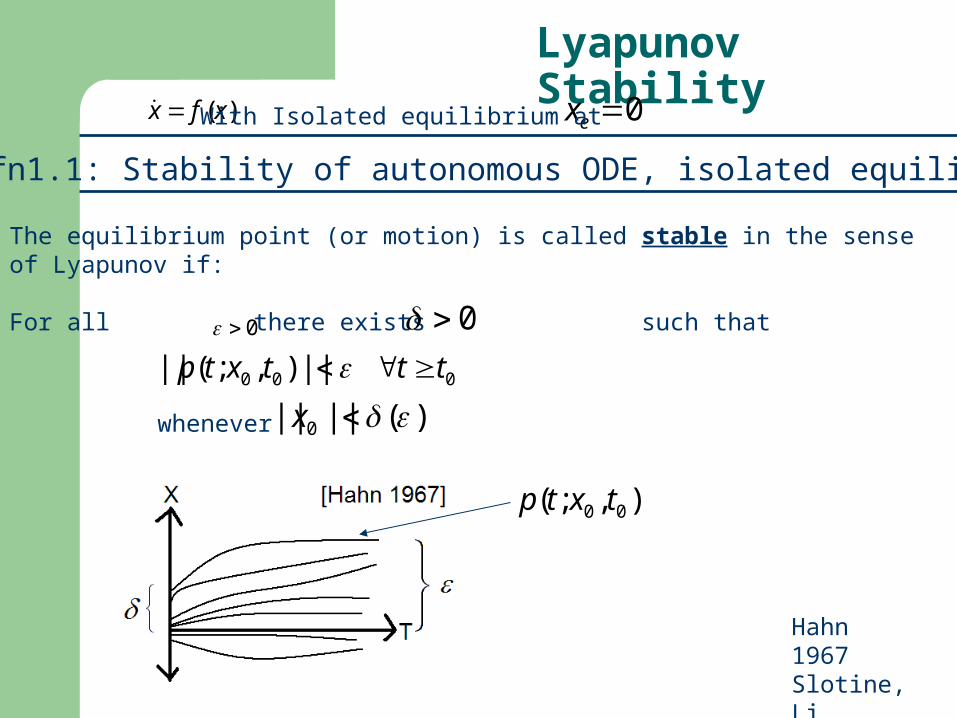
Lyapunov Stability
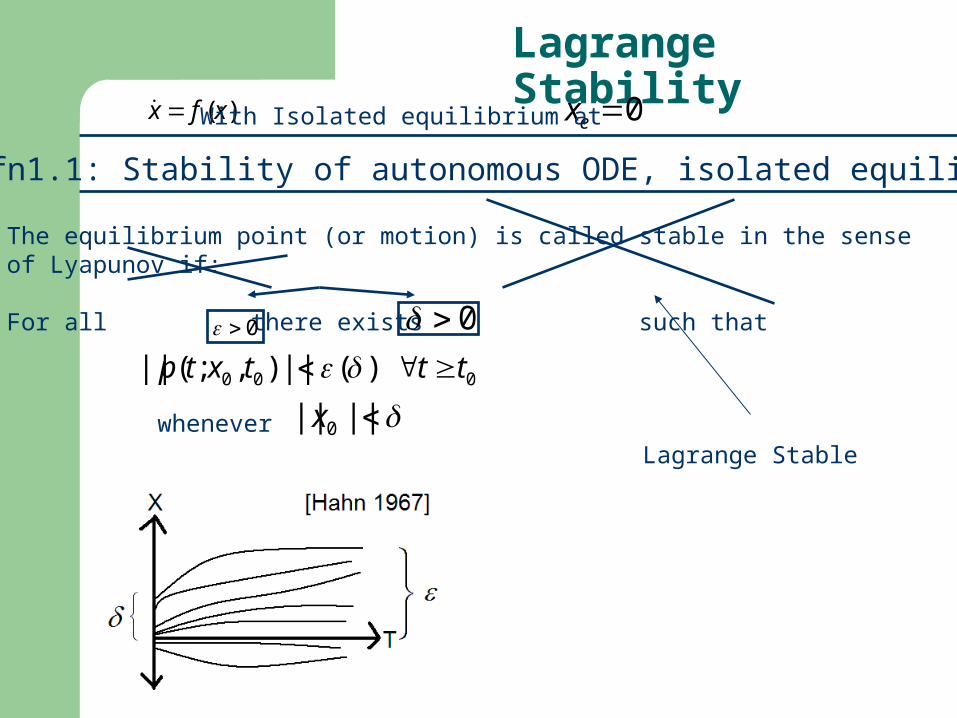
)(xfx 0exWith Isolated equilibrium at
Defn1.1: Stability of autonomous ODE, isolated equilibrium
Hahn 1967Slotine, Li
The equilibrium point (or motion) is called stable in the senseof Lyapunov if:
For all there exists such that0 0
000 ||),;(|| tttxtp
whenever )( |||| 0 x
),;( 00 txtp
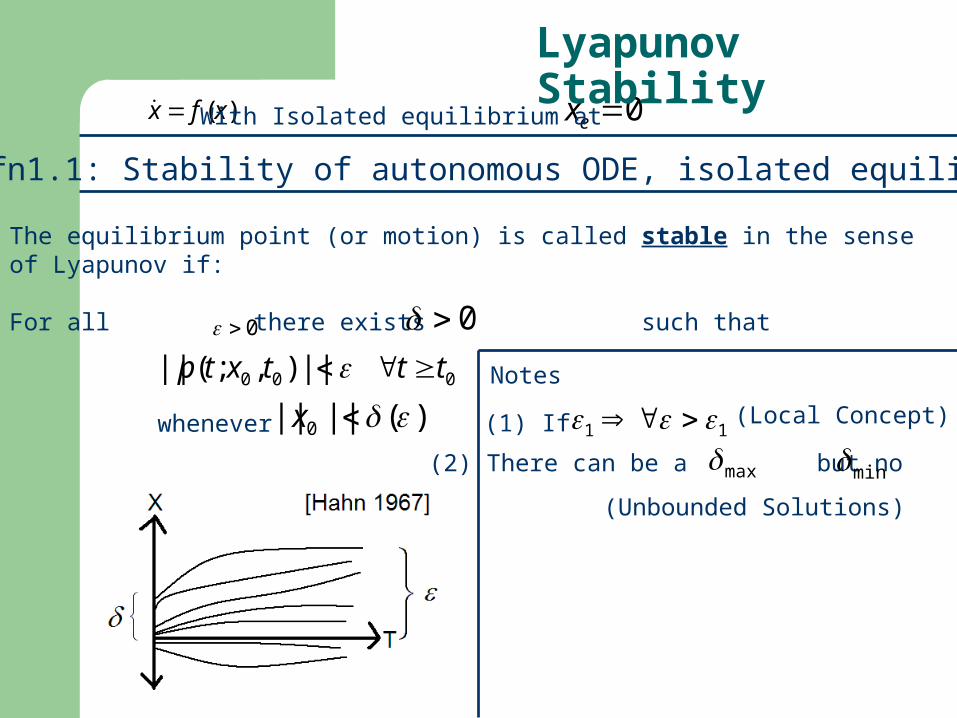
)(xfx 0exWith Isolated equilibrium at
Defn1.1: Stability of autonomous ODE, isolated equilibrium
The equilibrium point (or motion) is called stable in the senseof Lyapunov if:
For all there exists such that0 0
000 ||),;(|| tttxtp
whenever )( |||| 0 xNotes
(1) If 11 (2) There can be a but no minmax
Lyapunov Stability
(Local Concept)
(Unbounded Solutions)
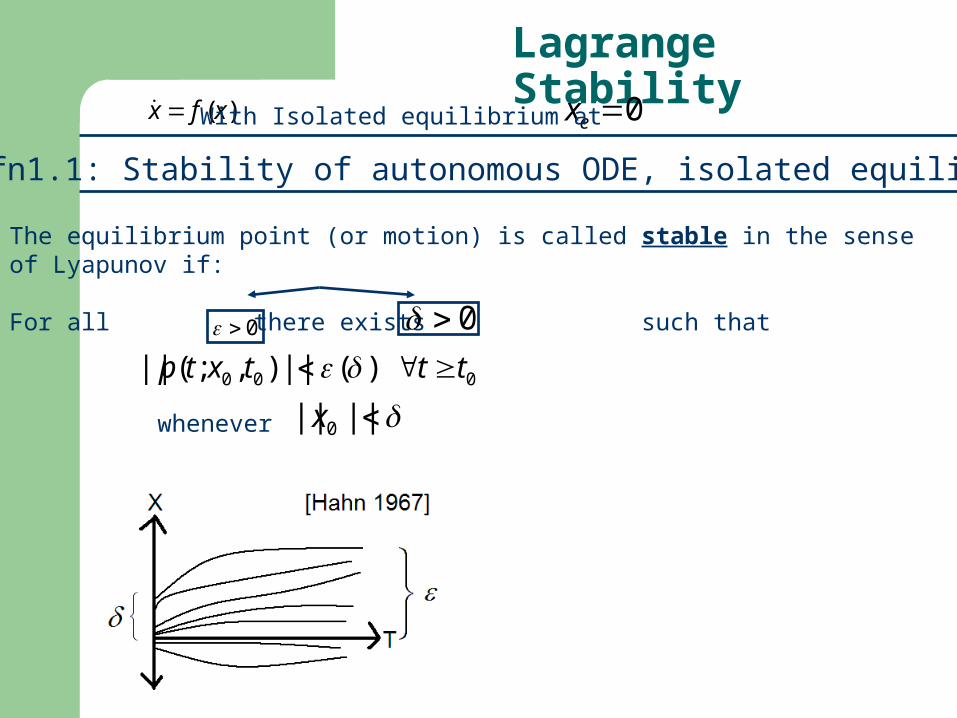
Lagrange Stability
)(xfx 0exWith Isolated equilibrium at
Defn1.1: Stability of autonomous ODE, isolated equilibrium
The equilibrium point (or motion) is called stable in the senseof Lyapunov if:
For all there exists such that0 0
000 )( ||),;(|| tttxtp
whenever |||| 0 x
Lagrange Stability
)(xfx 0exWith Isolated equilibrium at
Defn1.1: Stability of autonomous ODE, isolated equilibrium
The equilibrium point (or motion) is called stable in the senseof Lyapunov if:
For all there exists such that0 0
000 )( ||),;(|| tttxtp
whenever |||| 0 xLagrange Stable
Lagrange Stability
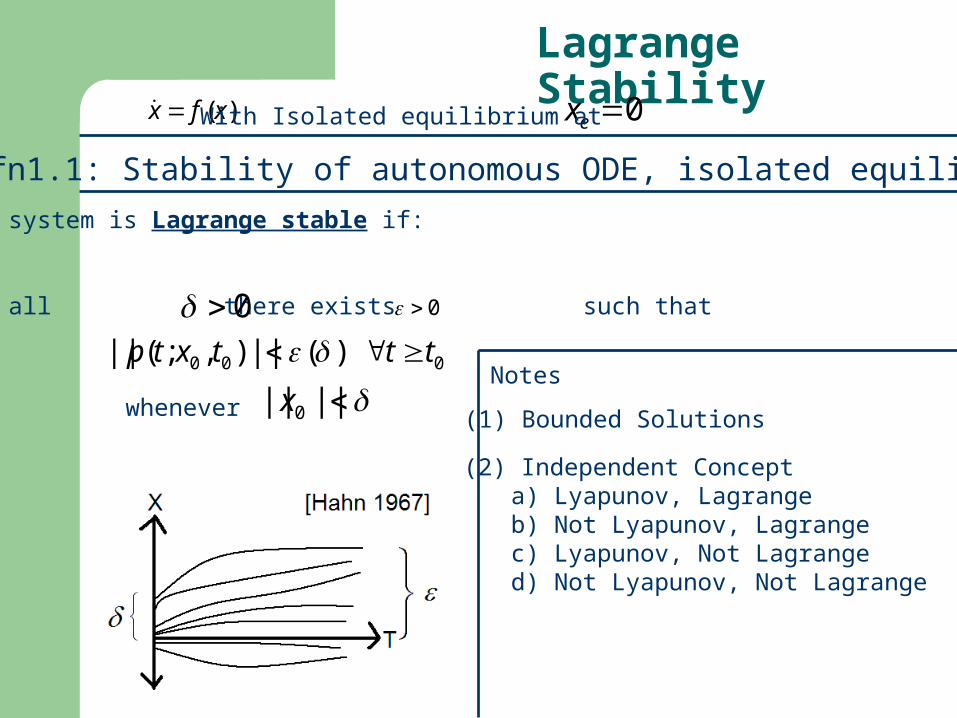
)(xfx 0exWith Isolated equilibrium at
Defn1.1: Stability of autonomous ODE, isolated equilibrium
The system is Lagrange stable if:
For all there exists such that00000 )( ||),;(|| tttxtp
whenever |||| 0 xNotes
(1) Bounded Solutions
(2) Independent Concepta) Lyapunov, Lagrangeb) Not Lyapunov, Lagrangec) Lyapunov, Not Lagranged) Not Lyapunov, Not Lagrange
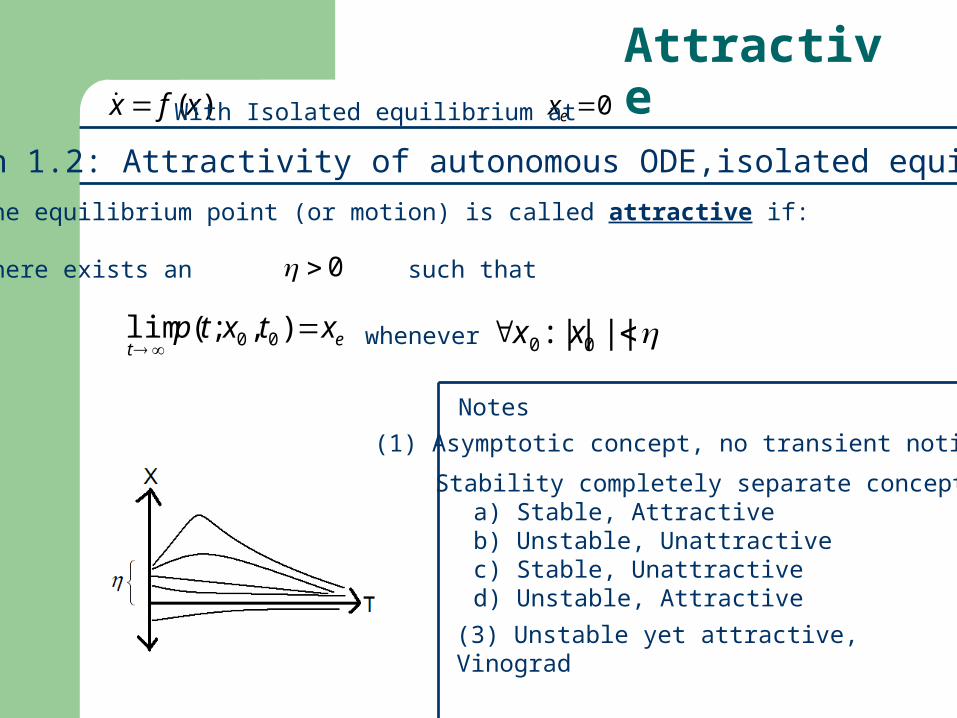
(2) Stability completely separate concepta) Stable, Attractiveb) Unstable, Unattractivec) Stable, Unattractived) Unstable, Attractive
Attractive)(xfx 0exWith Isolated equilibrium at
Defn 1.2: Attractivity of autonomous ODE,isolated equilibrium
The equilibrium point (or motion) is called attractive if:
There exists an such that0
et
xtxtp
),;(lim 00 whenever ||:|| 00 xx
(3) Unstable yet attractive, Vinograd
Notes
(1) Asymptotic concept, no transient notion
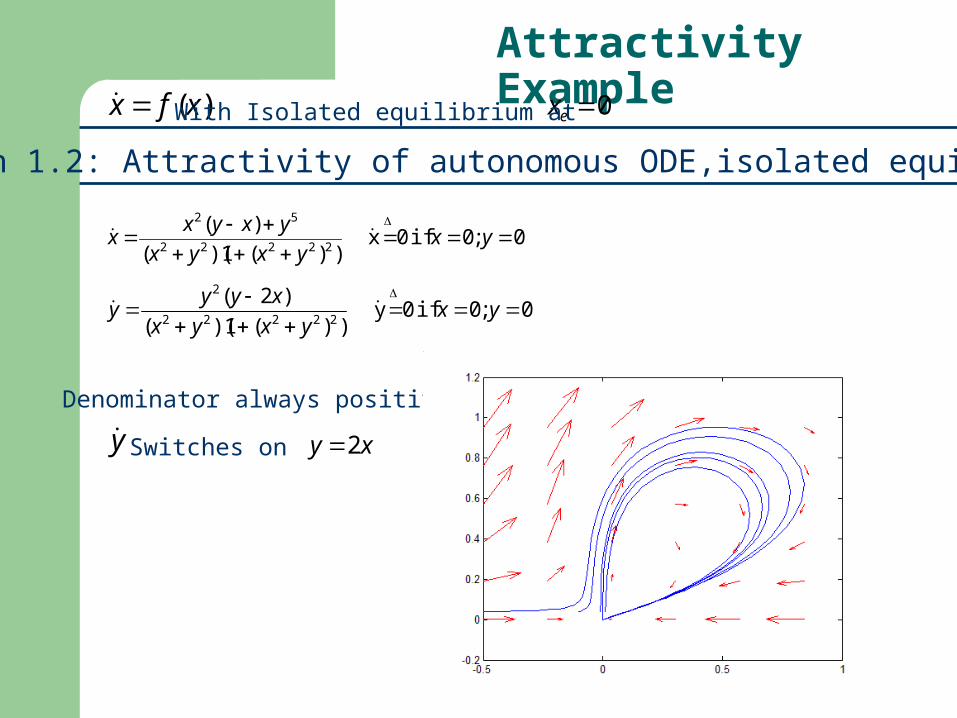
Attractivity Example)(xfx 0exWith Isolated equilibrium at
Defn 1.2: Attractivity of autonomous ODE,isolated equilibrium
0;0 if 0x ))(1)((
)(22222
52
yxyxyx
yxyxx
0;0 if 0y ))(1)((
)2(22222
2
yxyxyx
xyyy
Denominator always positive
y Switches on xy 2
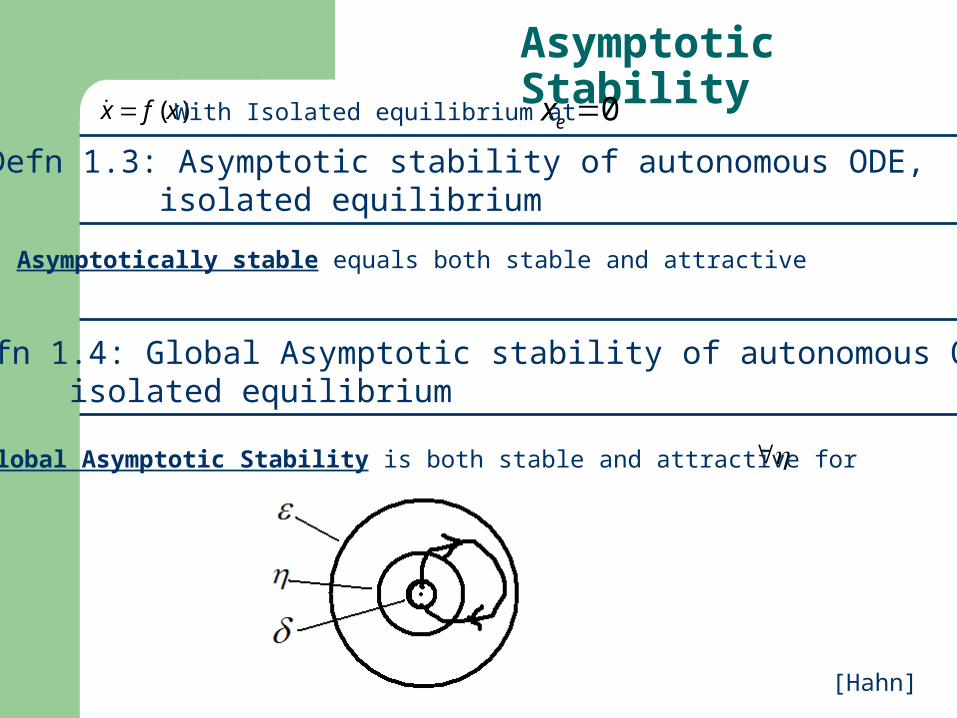
Asymptotic Stability
)(xfx 0exWith Isolated equilibrium at
Defn 1.3: Asymptotic stability of autonomous ODE, isolated equilibrium
Asymptotically stable equals both stable and attractive
Defn 1.4: Global Asymptotic stability of autonomous ODE, isolated equilibrium
Global Asymptotic Stability is both stable and attractive for
[Hahn]
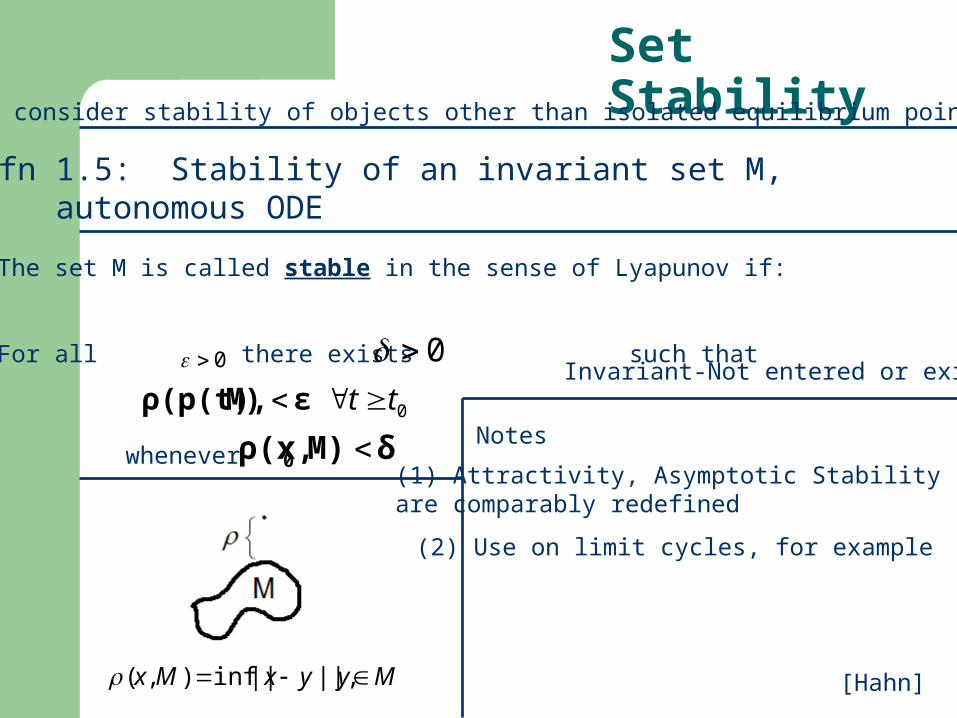
Set Stability
Defn 1.5: Stability of an invariant set M,autonomous ODE
Notes
MyyxMx ||,||inf),(
Now consider stability of objects other than isolated equilibrium point
The set M is called stable in the sense of Lyapunov if:
For all there exists such that0 0
0 tt ε M)ρ(p(t),
whenever δ M),ρ(x0 (1) Attractivity, Asymptotic Stability are comparably redefined
Invariant-Not entered or exited
(2) Use on limit cycles, for example
[Hahn]
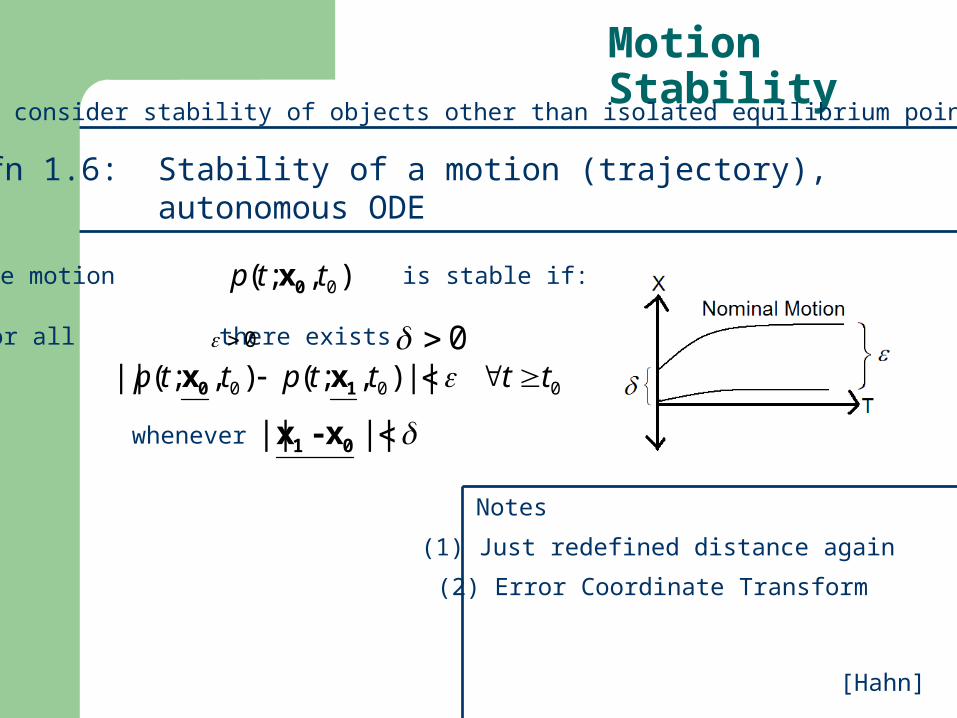
Motion Stability
Defn 1.6: Stability of a motion (trajectory), autonomous ODE
The motion is stable if:),;( 0ttp 0x
Now consider stability of objects other than isolated equilibrium point
For all there exists such that0 0000 ||),;(),;(|| ttttpttp 10 xx
whenever |||| 01 x-x
Notes
(1) Just redefined distance again
(2) Error Coordinate Transform
[Hahn]
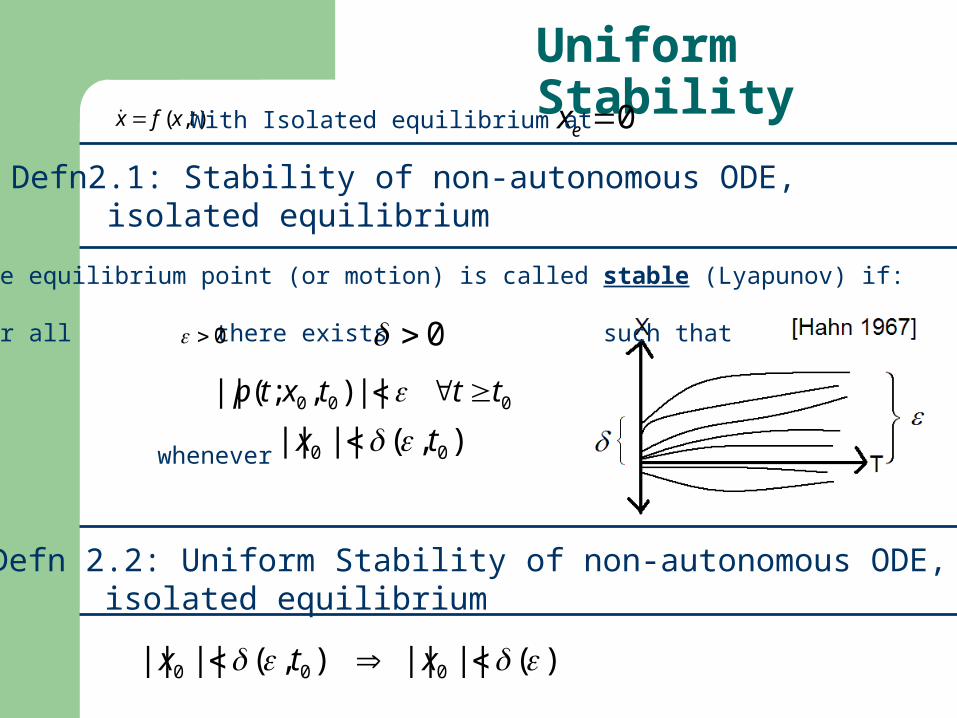
Uniform Stability),( txfx 0exWith Isolated equilibrium at
Defn2.1: Stability of non-autonomous ODE,isolated equilibrium
The equilibrium point (or motion) is called stable (Lyapunov) if:
For all there exists such that0 0
000 ||),;(|| tttxtp
whenever ),( |||| 00 tx
Defn 2.2: Uniform Stability of non-autonomous ODE, isolated equilibrium
),( |||| 00 tx )( |||| 0 x
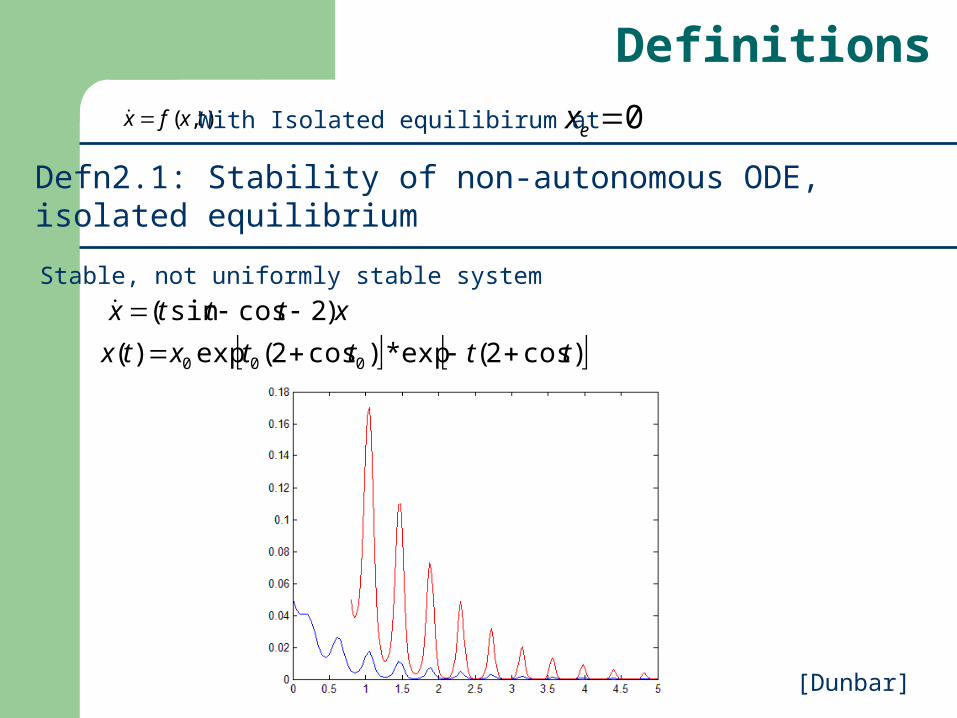
Definitions),( txfx 0exWith Isolated equilibirum at
Defn2.1: Stability of non-autonomous ODE,isolated equilibrium
Stable, not uniformly stable system
xtttx )2cossin(
)cos2(exp*)cos2(exp)( 000 ttttxtx
[Dunbar]
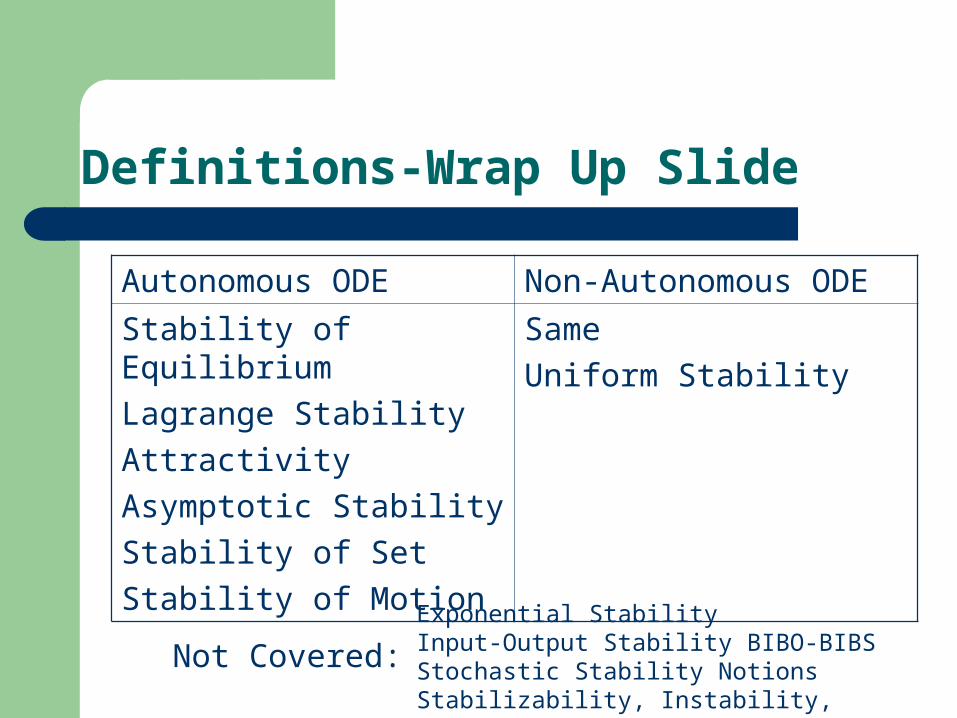
Definitions-Wrap Up Slide
Exponential StabilityInput-Output Stability BIBO-BIBSStochastic Stability NotionsStabilizability, Instability, Total
Autonomous ODE Non-Autonomous ODE
Stability of Equilibrium
Lagrange Stability
Attractivity
Asymptotic Stability
Stability of Set
Stability of Motion
Same
Uniform Stability
Not Covered:
Theorems
Restrict attention again to autonomous, non-autonomous ODE
How do we show a specific system has a stability property?
These theorems typically relate existence of a particular function(Lyapunov) function to a particular stability property
Theorem: If there exists a Lyapunov function,
then some stability property
MANY theorems exist which can be used to prove some stability property
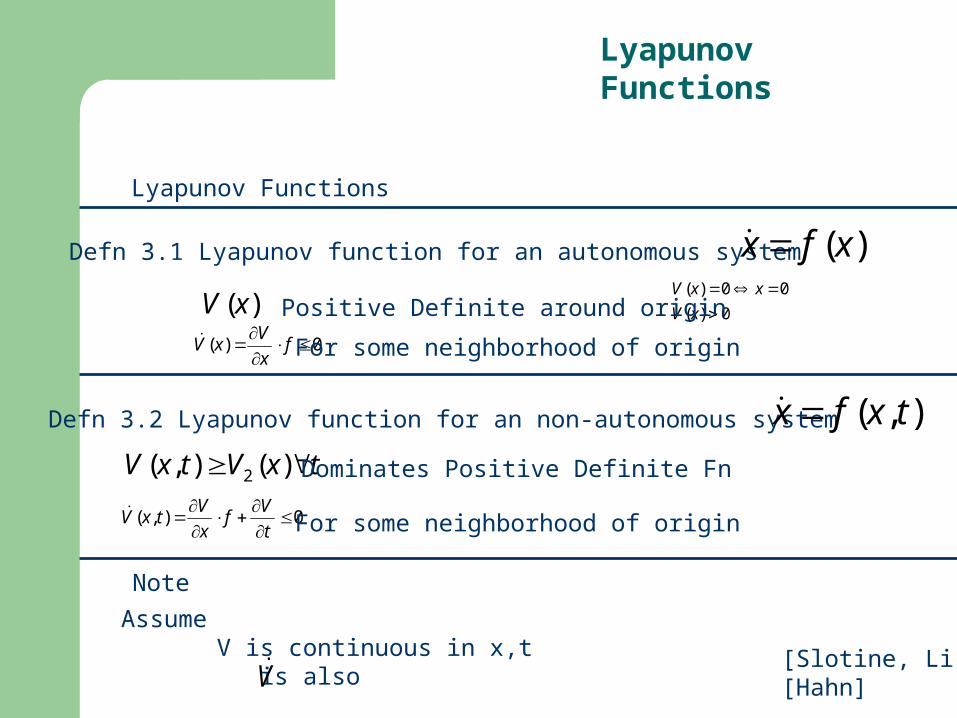
Lyapunov Functions
Lyapunov Functions
0)(
00)(
xV
xxV
0)(
fx
VxV
Defn 3.1 Lyapunov function for an autonomous system )(xfx
)(xV Positive Definite around origin
For some neighborhood of origin
Defn 3.2 Lyapunov function for an non-autonomous system ),( txfx txVtxV )(),( 2
[Slotine, Li][Hahn]
0),(
t
Vf
x
VtxV
Dominates Positive Definite Fn
For some neighborhood of origin
Assume V is continuous in x,t is also
Note
V
Stability Theorem
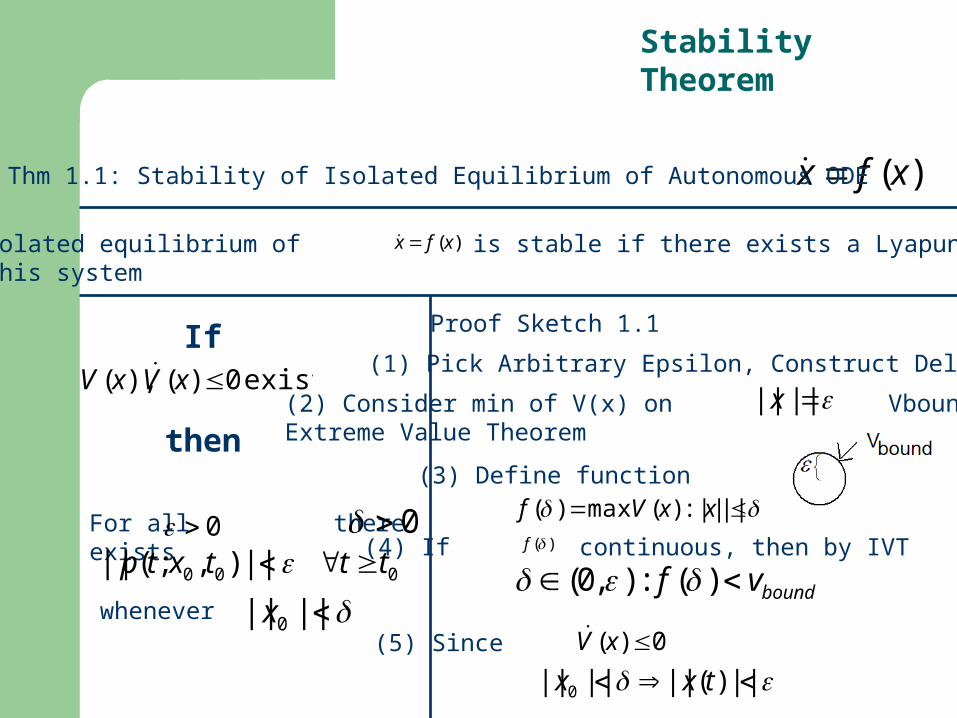
)(xfx Thm 1.1: Stability of Isolated Equilibrium of Autonomous ODE
An isolated equilibrium of is stable if there exists a Lyapunov Function for this system
)(xfx
Proof Sketch 1.1
For all there exists
0 0000 ||),;(|| tttxtp
whenever |||| 0 x
Ifexists 0)(),( xVxV
then
(1) Pick Arbitrary Epsilon, Construct Delta
(2) Consider min of V(x) on Vbound Extreme Value Theorem
|||| x
||:||)(max)( xxVf(3) Define function
(4) If continuous, then by IVT
boundvf )(:),0( )(f
(5) Since
||)(|||||| 0 txx
0)( xV
Stability proof example
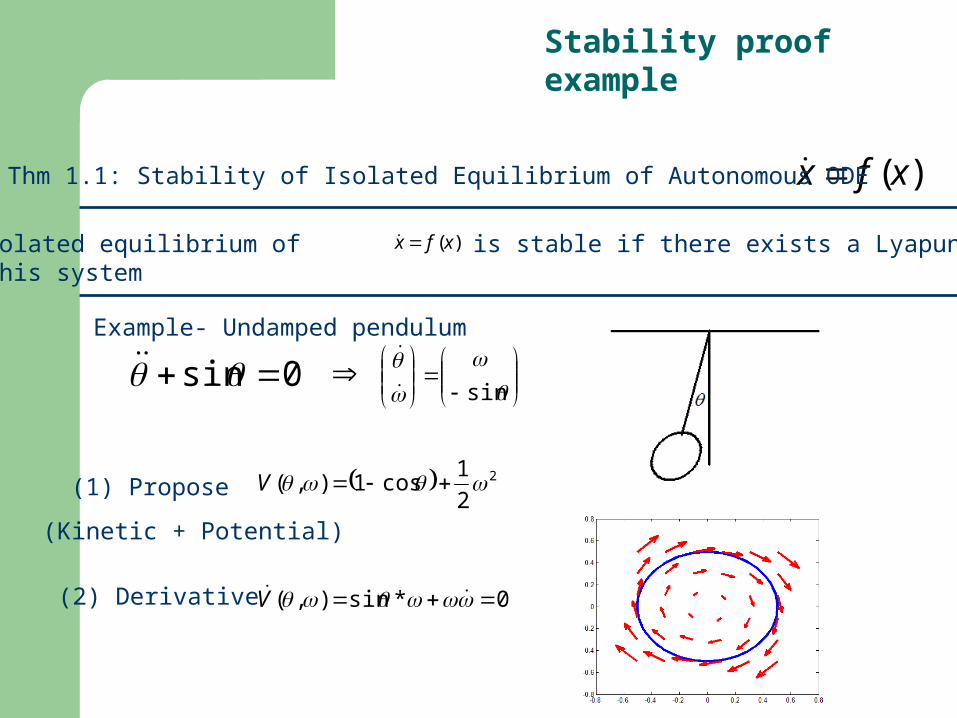
)(xfx Thm 1.1: Stability of Isolated Equilibrium of Autonomous ODE
An isolated equilibrium of is stable if there exists a Lyapunov Function for this system
)(xfx
Example- Undamped pendulum
0sin
sin
2
2
1cos1),( V
0*sin),( V
(1) Propose
(2) Derivative
(Kinetic + Potential)
Asymptotic stability theorem
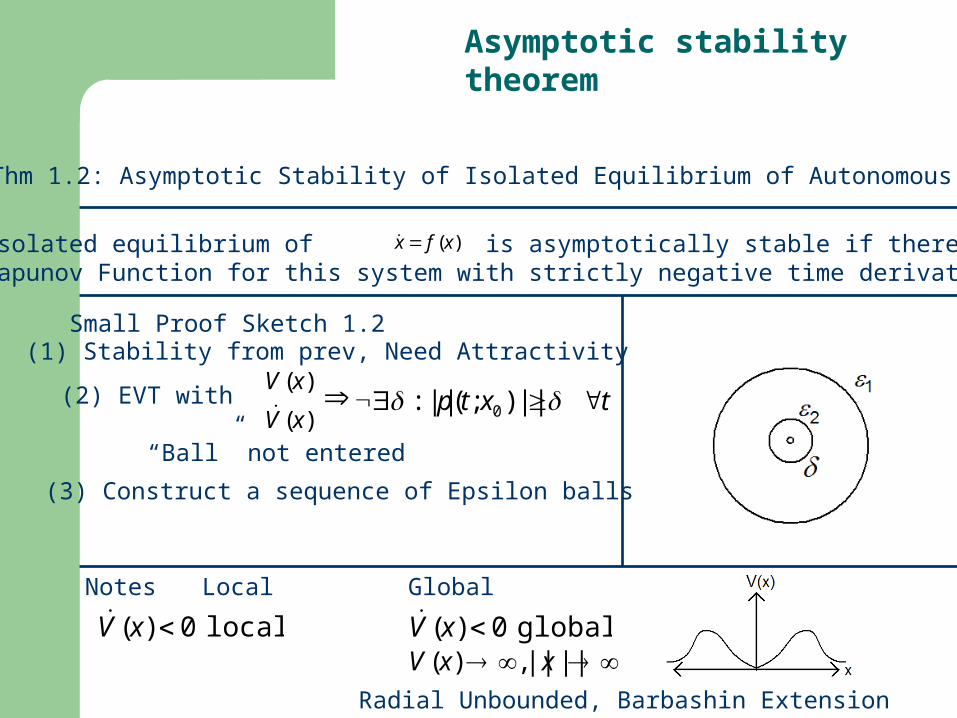
Thm 1.2: Asymptotic Stability of Isolated Equilibrium of Autonomous ODE
An isolated equilibrium of is asymptotically stable if there exists a Lyapunov Function for this system with strictly negative time derivative.
)(xfx
Small Proof Sketch 1.2
Notes
||||,)( xxV
Radial Unbounded, Barbashin Extension
locally 0)( xVLocal Global
globally 0)( xV
(1) Stability from prev, Need Attractivity
(2) EVT with
“Ball” not entered)(
)(
xV
xV txtp ||);(:|| 0
(3) Construct a sequence of Epsilon balls
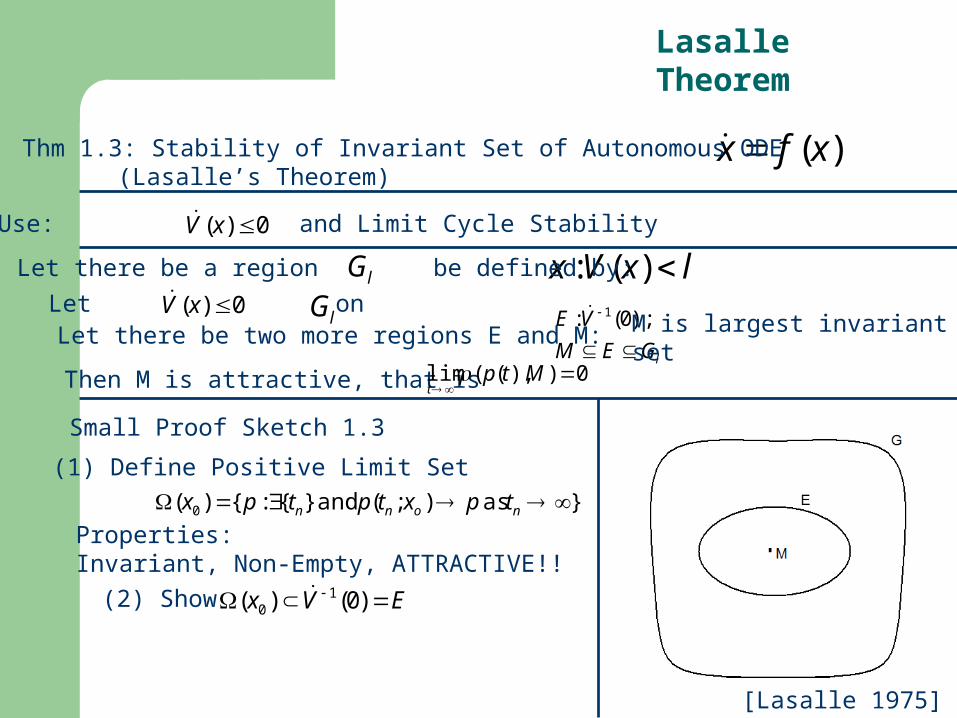
lxVx )(:lG
Let there be a region be defined by:
Let onLet there be two more regions E and M:
lGEM
VE
);0(: 1 M is largest invariantset
Lasalle Theorem
)(xfx Thm 1.3: Stability of Invariant Set of Autonomous ODE(Lasalle’s Theorem)
Small Proof Sketch 1.3
lG0)( xV
Then M is attractive, that is 0)),((lim
Mtpt
} as );( and }{:{)( 0 nonn tpxtptpx
(1) Define Positive Limit Set
Properties:Invariant, Non-Empty, ATTRACTIVE!!
(2) Show EVx )0()( 10
Use: and Limit Cycle Stability0)( xV
[Lasalle 1975]
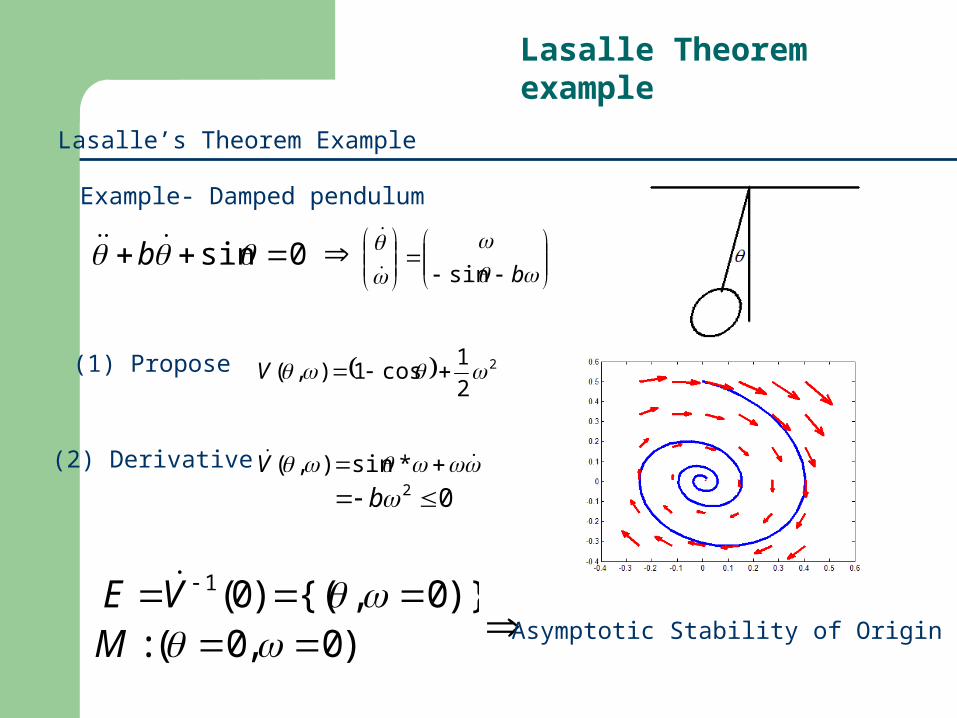
Lasalle Theorem example
Lasalle’s Theorem Example
Example- Damped pendulum
0sin b
bsin
2
2
1cos1),( V(1) Propose
(2) Derivative *sin),(V
02 b
)}0,{()0(1 VE
)0,0(: M Asymptotic Stability of Origin
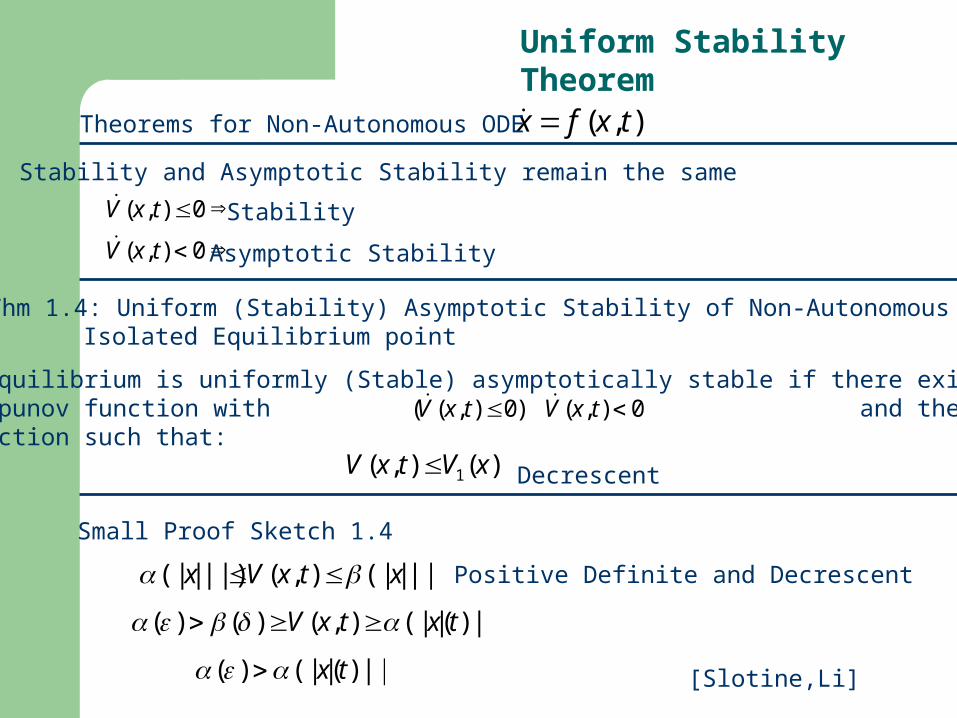
Uniform Stability Theorem
),( txfx Theorems for Non-Autonomous ODE
Small Proof Sketch 1.4
Stability and Asymptotic Stability remain the same
0),( txV Stability
0),( txV Asymptotic Stability
Thm 1.4: Uniform (Stability) Asymptotic Stability of Non-Autonomous ODE, Isolated Equilibrium point
The equilibrium is uniformly (Stable) asymptotically stable if there existsA Lyapunov function with and there existsa function such that:
)0),(( txV 0),( txV
)(),( 1 xVtxV
||)(||),(||)(|| xtxVx Positive Definite and Decrescent
||))((||),()()( txtxV
Decrescent
[Slotine,Li]||))((||)( tx
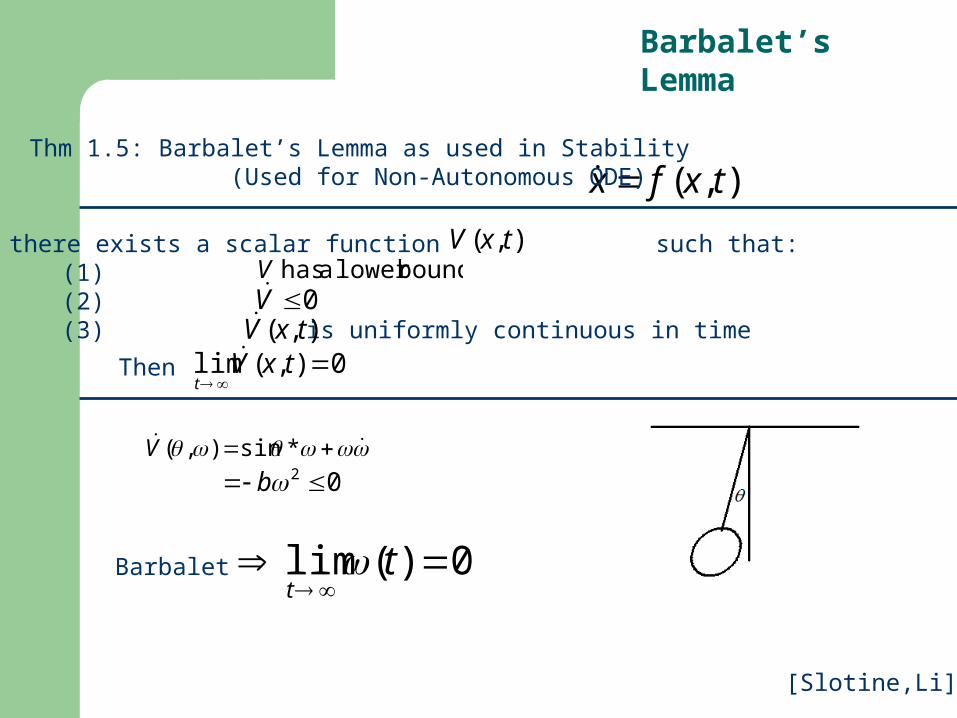
Barbalet’s Lemma
),( txfx Thm 1.5: Barbalet’s Lemma as used in Stability (Used for Non-Autonomous ODE)
If there exists a scalar function such that:(1)(2) (3) is uniformly continuous in time
),( txV
0V),( txV
Then 0),(lim
txVt
*sin),(V
02 b
Barbalet 0)(lim
tt
boundlower a has V
[Slotine,Li]
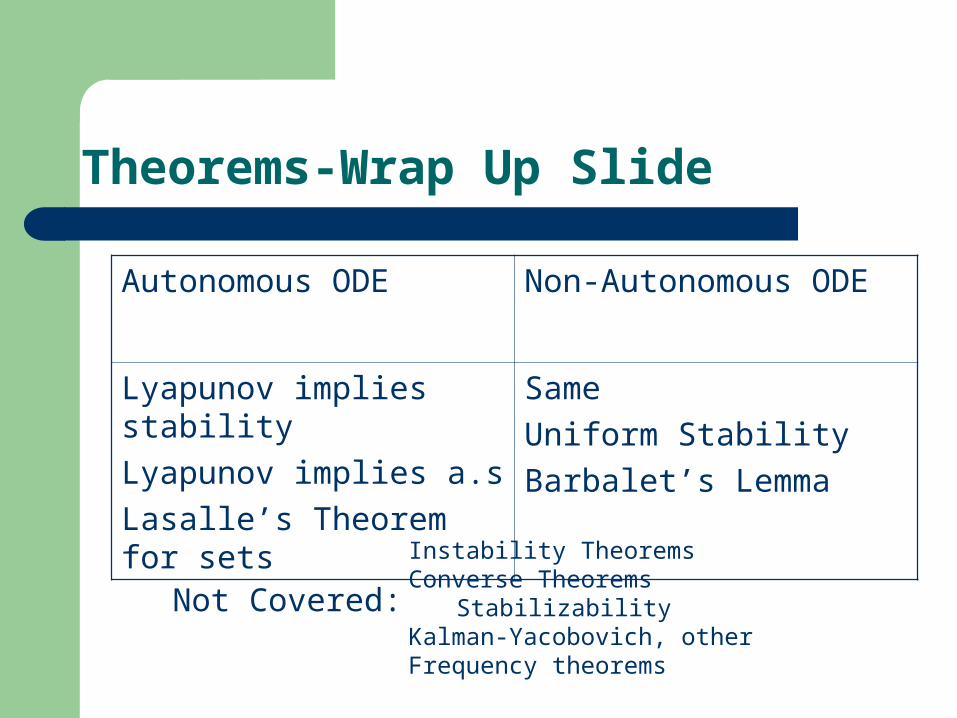
Theorems-Wrap Up Slide
Instability TheoremsConverse Theorems
StabilizabilityKalman-Yacobovich, other Frequency theorems
Autonomous ODE Non-Autonomous ODE
Lyapunov implies stability
Lyapunov implies a.s
Lasalle’s Theorem for sets
Same
Uniform Stability
Barbalet’s Lemma
Not Covered:
Techniques for Lyapunov Construction
Theorems relate function existence with stability
How then to show a Lyapunov function exists? Construct it
In general, Lyapunov function construction is an art.
Special CasesLinear Time Invariant SystemsMechanical Systems
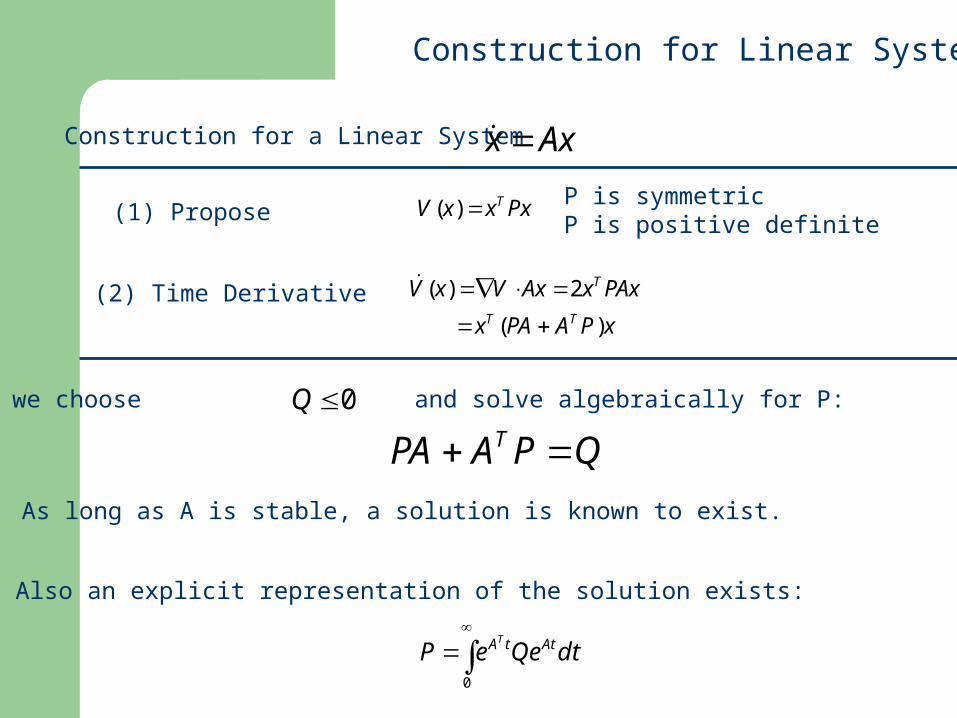
Construction for Linear System
Construction for a Linear System Axx
PxxxV T)(
xPAPAx
PAxxAxVxVTT
T
)(
2)(
(1) Propose
(2) Time Derivative
0
dtQeeP AttAT
P is symmetricP is positive definite
QPAPA T If we choose and solve algebraically for P: 0Q
As long as A is stable, a solution is known to exist.
Also an explicit representation of the solution exists:
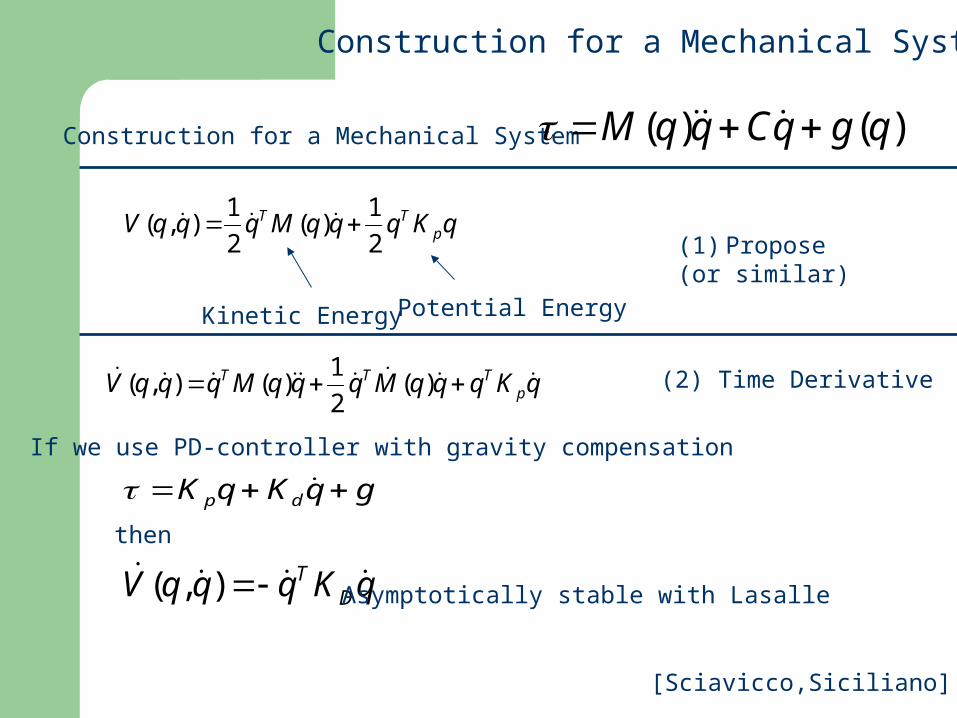
Construction for a Mechanical System
Construction for a Mechanical System )()( qgqCqqM
qKqqqMqqqV pTT
2
1)(
2
1),(
Kinetic Energy Potential Energy
(1) Propose(or similar)
(2) Time DerivativeqKqqqMqqqMqqqV pTTT )(
2
1)(),(
[Sciavicco,Siciliano]
gqKqK dp If we use PD-controller with gravity compensation
then
qKqqqV DT ),( Asymptotically stable with Lasalle
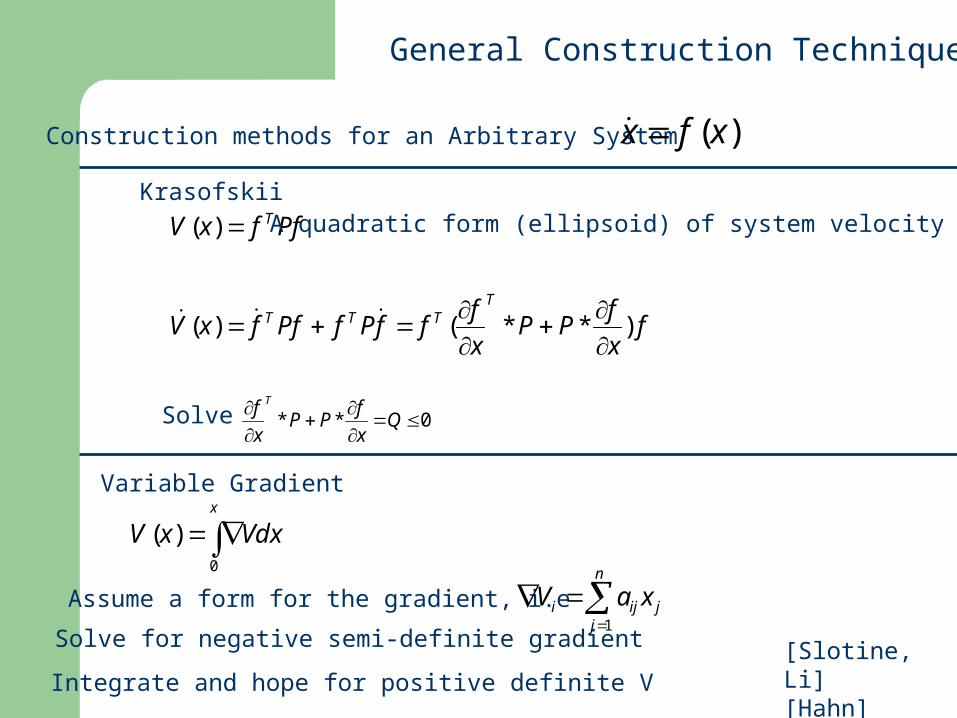
General Construction Techniques
PffxV T)( A quadratic form (ellipsoid) of system velocityKrasofskii
Variable Gradient
[Slotine, Li][Hahn]
fx
fPP
x
fffPfPffxV
TTTT )**()(
Solve 0**
Qx
fPP
x
f T
x
VdxxV0
)(
Assume a form for the gradient, i.e
n
jjiji xaV
1Solve for negative semi-definite gradient
Integrate and hope for positive definite V
Construction methods for an Arbitrary System )(xfx
Construction Wrap-Up Slide
(1) Linear System -> Explicity Solve Lyapunov Equation
(2) Mechanical System -> Try a variant of mechanical energy
(3) Krasovskii’s Method Variable Gradient
Problem specific trial and error
Conclusion
Motivated why stability is an important concept
Looked at a variety of definitions of various forms of stability
Looked at theorems relating Lyapunov functions to these notions of stability
Looked at some methods to construct Lyapunov functions for particular problems