Embed Size (px)
Citation preview

Solution Assignment #8 True or False: (1) True (2) True (3) True (4) True (5) False 6.) b %Skill check 6 p=3.25*[1/6 1]; q=[1/24 11/24 1 0]; sys=tf(p,q); [mag,phase,w]=bode(sys); [Gm,Pm,Wcg,Wcp]=margin(mag,phase,w) Script Run Gm = 5.2850e+03 Pm = 54.8907 (Phase margin) Wcg = 262.3778 Wcp = 2.5586 (Cross over frequency) 7.) a p=[1 0.2]; q=[1/8 11/8 19/4 5]; sys=tf(p,q); bode(sys) The gain margin is ∞ so the system is stable
Figure Skill check 7
70
60
50
40
30
20
10
Mag
nitu
de (d
B)
10 2 10 1 100 101 102180
135
90
45
0
45
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)

8.) d
! ! =9 !
(!" + 1)( !" ! + 3!" + 9) =9 ![ 9− 4!! − !(12! − !!)]
9− 4!! − !(12! − !!)
At limiting K, imaginary of L(s)=0 => ω=0 or ! = 2 3 rad/s
!"#$ ! ! = −1 =>9 ! 9− 4!! − ! 12! − !!
9− 4!! − ! 12! − !!!!! !
= −1 => − 351 !1521
= −1 => ! = 4.33 9.) a %Skill check 9 p=4.3*9*[0.2 1]; q=[1 4 12 9]; sys=tf(p,q); [mag,phase,w]=bode(sys); [Gm,Pm,Wcg,Wcp]=margin(mag,phase,w) Script run Gm = 5.1077 Pm = 28.1321 Wcg = 7.1834 Wcp = 3.7548 10.) d %Skill check 10 p=[1 1]; q=[4 1 0 0]; sys=tf(p,q); [mag,phase,w]=bode(sys); [Gm,Pm,Wcg,Wcp]=margin(mag,phase,w) Script run Gm = 1.3693e-05 Pm = -35.7368 Wcg = 0.0037 Wcp = 0.6537

The phase margin is negative so the system is unstable 11.) b !!" = 180+ !"#!!
!4 − 180 => ! = 3.3564 !"#/!
20 log ! + 20log ( !" + 4 )+20log( !! )=0 (eq11) using ! = 3.3564 !"#/! in (eq11) we get K=2.15 12.) a Replace !!!.!! !" !!.!!!!
!.!!!! and repeat the procedure of question #11
14.) c p=[-0.3 1]; q=[3/50 1/2 1 0]; sys=tf(p,q); bode(sys) grid on
15.) a %Skill check 15 p=[1 4]; q=[1 6 5 0]; sys=tf(p,q); [mag,phase,w]=bode(sys); [Gm,Pm,Wcg,Wcp]=margin(mag,phase,w)
10 1 100 101 1020
45
90
135
180
225
270
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
80
60
40
20
0
20
40System: sysFrequency (rad/sec): 1.37Magnitude (dB): 3.05
Mag
nitu
de (d
B)

Gm = 7.2196e+04 Pm = 58.1073 Wcg = 268.7613 Wcp = 0.6678 Word Match (in or, top to bottom): f, e, k, b, j, a, i, d, h, c, g E9.16
The phase approximation is

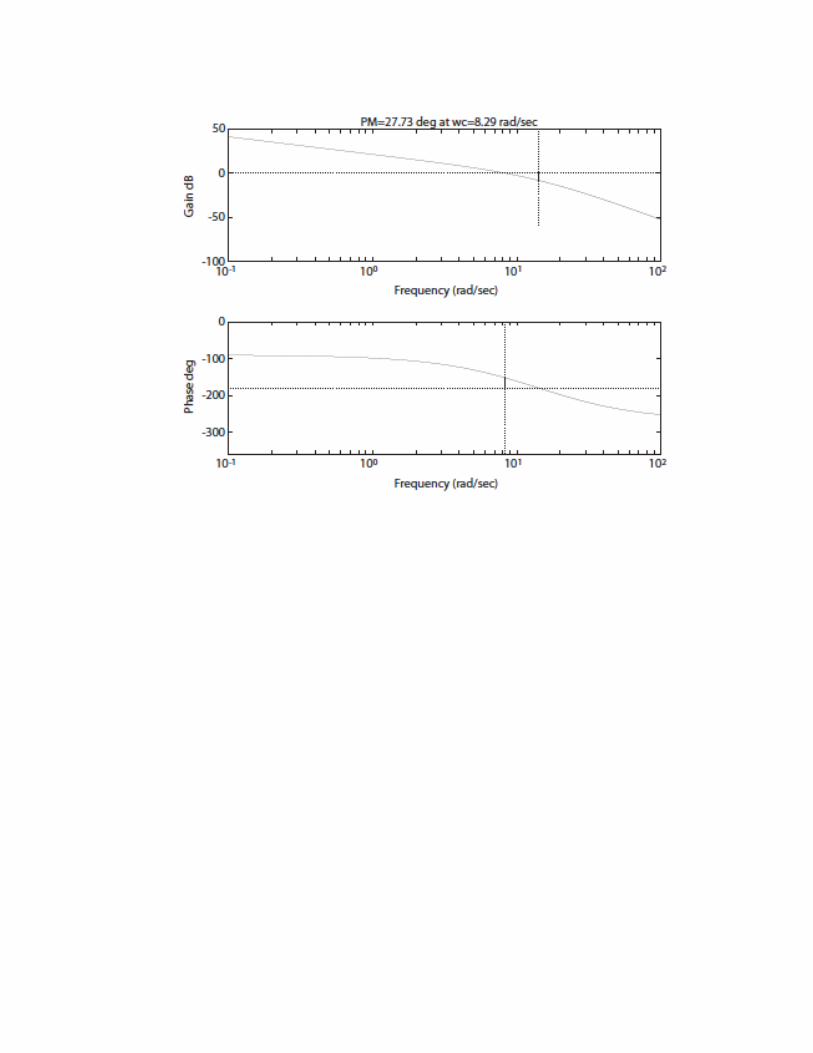
E9.24 Using the Nyquist criterion, we have P=1 and N=0 which implies Z=N+P=1. Hence the system has root in the right half-plane. E9.25 p=[11.7]; q=[1/200 3/20 1 0]; sys=tf(p,q); bode(sys) grid on p=[11.7]; q=[1/200 3/20 1 0]; sys=tf(p,q); bode(sys) grid on Using the bode plot of the loop transfer function
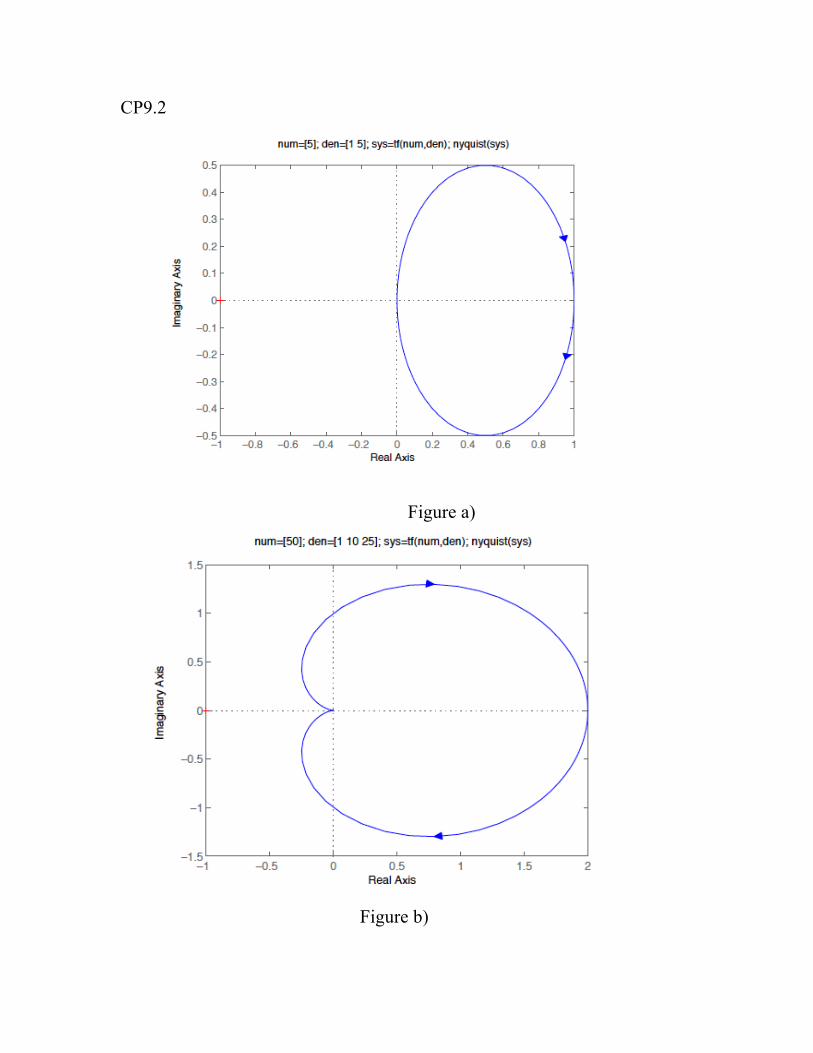
CP9.2
Figure a)
Figure b)

Figure c)

CP9.4
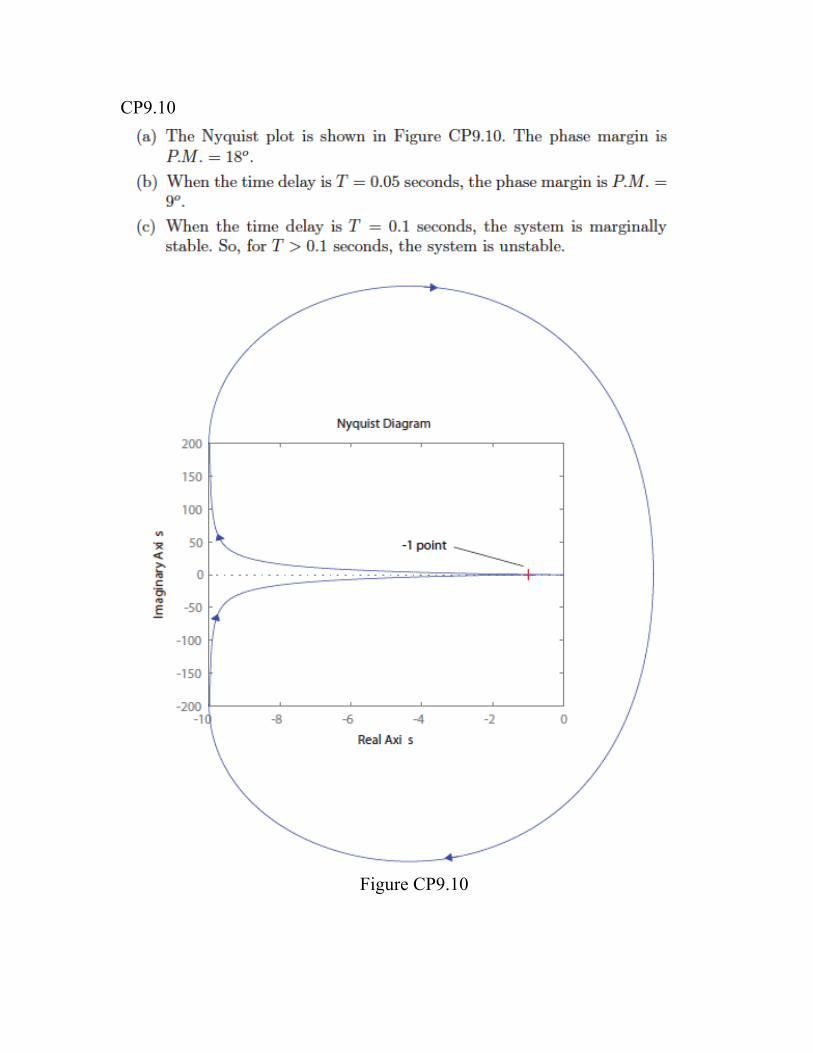
CP9.10
Figure CP9.10

E10.3
Figure E10.3

E10.14
Figure E10.14

E10.20
Figure E10.20












![Assignment 2 Solution[1]](https://img.pdfslide.us/doc/110x75/55cf96c8550346d0338dc126/assignment-2-solution1.jpg)















