Embed Size (px)
Citation preview

Solitary waves and shock waves of the KdV6 equation
Houria Triki a, Daniela Milovic b, Anjan Biswas c,d,n
a Radiation Physics Laboratory, Department of Physics, Faculty of Sciences, Badji Mokhtar University, P.O. Box 12, 23000 Annaba, Algeriab Faculty of Electronic Engineering, Department of Telecommunications, University of Nis, Aleksandra Medvedeva 14, 18000 Nis, Serbiac Department of Mathematical Sciences, Delaware State University, Dover, DE 19901-2277, USAd Department of Mathematics, Faculty of Sciences, King Abdulaziz University, Jeddah 80203, Saudi Arabia
a r t i c l e i n f o
Article history:Received 27 January 2013Accepted 3 September 2013
Keywords:SolitonsShock wavesIntegrability
a b s t r a c t
In this work, two variants of the KdV6 equation are investigated. The first variant is a family of the KdV6equation with arbitrary constant coefficients. The second variant is a KdV6 equation with time-varyingcoupling coefficients, power law nonlinearity and linear damping term. We make use of the solitonansatz to determine the solitary wave as well as shock wave solutions for first model and the conditionsof existence of solitons are presented. We proved the existence of soliton solutions for a generalized formof KdV6 equation with time-dependent coefficients under specific conditions.
& 2013 Elsevier Ltd. All rights reserved.
1. Introduction
There are several nonlinear evolution equations that govern thedynamics of shallow water waves in lakes and oceans (Ablowitzand Clarkson, 1991; Biswas, 2008a,b, 2009; Biswas and Milovic,2010; Fan, 2000; Da-Feng, 2010; Gomez et al., 2010; Karsau-Kalkani et al., 2008; Kupershmidt, 2008; Li and Zhang, 2010,2012; Parkes and Duffy, 1996; Saha et al., 2009; Salas andGomez, 2010; Triki and Wazwaz, 2009; Wang, 1996; Wang et al.,1996, 2008; Wang and Li, 2005; Wazwaz, 2004a,b; Yan, 2001; Yaoand Zeng, 2008; Zhou et al., 2003). Some of them are theKorteweg–de Vries (KdV) equation, Boussinesq equation, Pere-grine equation, Bona–Chen equation, shallow water wave equa-tions and several others. This paper is going to address a similarequation. This is the KdV6 equation. It is a vector coupled equationthat is studied in the context of two-layered shallow water waves.Such a situation arises when there is an oil spill near an oceanshore that leads to the two layered fluid flow with the less denseoil forming the top layer.
The aim of this paper is to address the integrability aspect ofthis model equation. The ansatz method will be employed to carryout the integration. This will lead to the solitary wave as well asthe shock wave solution. Subsequently, the shock wave solution ofthe model will also be obtained using the same integrationarchitecture. Finally, the model will be addressed with time-dependent coefficients that will lead to a much closer to realitysituation.
2. Governing equation
In Yao and Zeng (2008), the Painlevé analysis was applied tothe class of sixth-order nonlinear wave equations, and four casesthat pass the Painlevé test were found. Three of those casescorrespond to well known integrable equations, whereas thefourth one turns out to be new:
ð∂3x þ8ux∂xþ4uxxÞðutþuxxxþ6u2x Þ ¼ 0: ð1Þ
By the new dependent variable transformations:
v¼ ux; ð2Þw¼ utþuxxxþ6u2
x ; ð3ÞEq. (1) is converted to
vtþvxxxþ12vvx�wx ¼ 0; ð4Þwxxxþ8vwxþ4wvx ¼ 0; ð5Þwhich is referred as KdV6 equation in Kupershmidt (2008) and Yaoand Zeng (2008) and regarded as a non-holonomic deformation ofthe KdV equation. The authors of Kupershmidt (2008) claimed thatthe model (4), (5) is different from the KdV equation with self-consistent sources and reported that they were unable to findhigher symmetries and asked if higher conserved densities and aHamiltonian formalism exist for (4), (5). Kupershmidt (2008)described (4), (5) as a non-holonomic perturbations of bi-Hamil-tonian systems. Rescaling v and t in (4), (5) yields
ut ¼ 6uuxþuxxx�wx; ð6Þ
wxxxþ4uwxþ2wux ¼ 0; ð7Þwhich can be converted into a non-holonomic perturbations of bi-Hamiltonian systems (Wang and Li, 2005). By rescaling u and t and
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/oceaneng
Ocean Engineering
0029-8018/$ - see front matter & 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.oceaneng.2013.09.001
n Corresponding author at: Department of Mathematical Sciences, Delaware StateUniversity, Dover, DE 19901-2277, USA. Tel.: þ1 302 857 7913.
E-mail address: [email protected] (A. Biswas).
Ocean Engineering 73 (2013) 119–125

using the Galilean invariance of KdV equation, the KdV6 equation(6), (7) can be rewritten as (Zhou et al., 2003)
ut ¼ 14ðuxxxþ6uuxÞ�wx; ð8Þ
wxxxþ4ðu�λÞwxþ2wux ¼ 0: ð9Þ
where λ is a parameter.In this work, two families of KdV6 equations, with constant and
time-dependent coefficients, will be investigated for the determi-nation of the solitary wave solution as well as shock wave solution.The KdV6 equations that we selected are
ut ¼ α1uuxþα2uxxx�α3wx; ð10Þ
wxxxþβ1ðu�λÞwxþβ2wux ¼ 0: ð11Þ
where αi (with i¼1, 2, 3), β1 and β2 are nonzero real constants.Moreover, we propose an important generalization of the KdV6equation having t-dependent coefficients and linear damping asfollows:
ut ¼ aðtÞunuxþbðtÞuxxx�cðtÞwxþ f ðtÞu; ð12Þ
wxxxþdðtÞðunwÞx�kðtÞwux ¼ 0; ð13Þ
where aðtÞ, bðtÞ, cðtÞ, dðtÞ, f ðtÞ and k(t) are time-dependent coeffi-cients. Here, in (12) and (13), the parameter n indicates the powerlaw nonlinearity, while f ðtÞ is the time-dependent coefficient oflinear damping. It should be noted that nonlinear evolutionequations with variable coefficients are needed to describe thepropagation of pulses in inhomogeneous media.
This work is organized as follows. In Section 3, we make use ofthe solitary wave ansatz to determine bright and dark solitons forthe first model of the KdV6 equation with constant couplingcoefficients. In Section 4, we derive bright and dark solitonsolutions for the second model of the KdV6 equation with time-varying coupling coefficients, power law nonlinearity and lineardamping. We also find the necessary constraints of the existenceof soliton pulses. Conclusions are contained in Section 6. We willsee that the proposed method is concise and effective to solvecoupled NLPDEs with constant and time-dependent coefficients.
3. The first KdV6 equation
We first begin our analysis on the first KdV6 equation withconstant coefficients:
ut ¼ α1uuxþα2uxxx�α3wx; ð14Þ
wxxxþβ1ðu�λÞwxþβ2wux ¼ 0; ð15Þ
where uðx; tÞ and vðx; tÞ are unknown functions depending on thespatial variable x and the temporal variable t. The subscripts x andt denote partial derivatives with respect to these variables, and α1,α2, α3, β1 and β2 are nonzero real constants. If setting α1 ¼ 6
4,α2 ¼ 1
4, α3 ¼ 1, β1 ¼ 4 and β2 ¼ 2, Eqs. (14) and (15) collapse to thecase of regular KdV6 equation (8) and (9).
In this section, making use of solitary wave ansatz in terms ofsech and tanh functions, respectively, solitary wave solution orbell-shaped soliton solutions and shock wave solution or kink-shaped soliton solutions are obtained for the considered KdV6equation with constant coefficients. The conditions of existence ofsolitons are also presented.
3.1. Solitary wave solution
To obtain the solitary wave solution of (14) and (15), we assumethe ansatz of the form (Biswas, 2008a, 2009)
uðx; tÞ ¼ A1
coshp1τ; ð16Þ
wðx; tÞ ¼ A2
coshp2τ; ð17Þ
where
τ¼ Bðx�vtÞ; ð18Þand
p140; p240;
for solitons to exist. Here, in (16)–(18), A1 and A2 are theamplitudes of the u-soliton and w-soliton, respectively, while v
is the velocity of the soliton and B is the inverse widths of thesolitons. Also, the exponents p1 and p2 are unknown at this pointand their values will fall out in the process of deriving the solutionof these equations. Substituting the hypothesis (16) and (17) into(14) and (15), we arrive at
p1BA1ðvþα2p21B2Þ tanh τ
coshp1τ�α3p2A2B tanh τ
coshp2τþα1p1A
21B tanh τ
cosh2p1τ
�α2A1p1ðp1þ1Þðp1þ2ÞB3tanh τ
coshp1 þ2τ¼ 0; ð19Þ
and
�A2p32B3 tanh τ
coshp2τþA2p2ðp2þ1Þðp2þ2ÞB3 tanh τ
coshp2 þ2τ
�A1A2Bðβ1p2þβ2p1Þ tanh τcoshp1 þp2τ
þβ1λp2A2B tanh τcoshp2τ
¼ 0: ð20Þ
From (20), by balancing principle, equating the exponents p2þ2and p1þp2 gives
p2þ2¼ p1þp2; ð21Þso that
p1 ¼ 2: ð22Þwhich is also obtained by equating the exponents p1þ2 and 2p1 in(19). Also from (19), by the same principle, equating the exponentsp2 and p1 gives
p2 ¼ p1; ð23Þand therefore
p2 ¼ p1 ¼ 2: ð24ÞIf we put p1 ¼ 2 and p2 ¼ 2 in (19) and (20), we can determine thesoliton parameters by setting the coefficients of the linearlyindependent functions tanh τ=coshp1 þ jτ to zero, where j¼ 0;2such that
v¼�α2β1λ4
; ð25Þ
A1 ¼15β1λ
4ð2β1þβ2Þ; ð26Þ
A2 ¼45ðβ1λÞ2½5α1�3α2ð2β1þβ2Þ�
32α3ð2β1þβ2Þ2; ð27Þ
and
B¼ffiffiffiffiffiffiffiffiβ1λ
p4
; ð28Þ
H. Triki et al. / Ocean Engineering 73 (2013) 119–125120

which forces the constraint relation
β1λ40: ð29ÞHence, finally, the 1-soliton solution of the first KdV6 equationwith constant coefficients is given by
uðx; tÞ ¼ A1
cosh2½Bðx�vtÞ�; ð30Þ
wðx; tÞ ¼ A2
cosh2½Bðx�vtÞ�; ð31Þ
where the amplitudes A1 and A2 of the u-soliton and w-soliton,respectively, are given by (26) and (27), while the velocity v of thesolitons is given in (25) and the inverse width B is shown in (28).
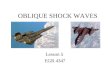
Fig. 1 represents the solitary wave profiles uðx; tÞ and wðx; tÞ. Inthe following figures the parameter values that are chosen areα1 ¼ 1, α2 ¼ 2, α3 ¼ 4, β1 ¼ 1, β2 ¼ 2 and λ¼ 2.
3.2. Shock wave solution
To study the shock wave solutions of (14) and (15), we assumethe solitary wave ansatz of the form (Biswas, 2008a, 2009)
uðx; tÞ ¼ A1 tanhp1τ; ð32Þ
wðx; tÞ ¼ A2 tanhp2τ; ð33Þ
where
τ¼ Bðx�vtÞ; ð34Þas in (18), and
p140; p240; ð35Þfor solitons to exist. Here, in (32)–(34), A1, A2 and B are freeparameters and v is the velocity of the wave. Also, the exponents
p1 and p2 are unknown at this point and will be determined later.Therefore substituting the ansatz (32) and (33) into (14) and (15)gives
p1vA1Bðtanhp1 þ1τ�tanhp1�1τÞ�α1p1A21Bftanh2p1�1τ�tanh2p1 þ1τg
�α2p1A1B3½ðp1�1Þðp1�2Þtanhp1�3τ �f2p21þðp1�1Þðp1�2Þgtanhp1�1τ
þf2p21þðp1þ1Þðp1þ2Þgtanhp1 þ1τ�ðp1þ1Þðp1þ2Þtanhp1 þ3τ�
þα3p2A2Bðtanhp2�1τ�tanhp2 þ1τÞ ¼ 0; ð36Þand
p2A2B3½ðp2�1Þðp2�2Þtanhp2�3τ�f2p22þðp2�1Þðp2�2Þgtanhp2�1τ
þf2p22þðp2þ1Þðp2þ2Þgtanhp2 þ1τ�ðp2þ1Þðp2þ2Þtanhp2 þ3τ�
þβ1p2A1A2Bftanhp1 þp2�1τ�tanhp1 þp2 þ1τg�β1λp2A2Bðtanhp2�1τ�tanhp2 þ1τÞþβ2p1A1A2Bftanhp1 þp2�1τ�tanhp1 þp2 þ1τg ¼ 0: ð37Þ
From (37), again by the balancing principle, equating the expo-nents p2þ3 and p1þp2þ1 gives
p2þ3¼ p1þp2þ1; ð38Þso that
p1 ¼ 2; ð39Þwhich is also obtained by equating the exponents p2þ1 andp1þp2�1 in (37) and the exponent pairs p1þ3 and 2p1þ1,p1þ1 and 2p1�1 in (36). Also from (36), equating the exponentsp2þ1 and p1þ1 gives
p2 ¼ p1; ð40Þand therefore
p1 ¼ p2 ¼ 2: ð41ÞNow, setting the coefficients of the stand-alone functions tanhp1�3τin (36) and tanhp2�3τ in (37) to zero yields p1 ¼ p2 ¼ 2. If we putp1 ¼ p2 ¼ 2 in (36) and (37), we can determine the soliton para-meters by setting the coefficients of the linearly independentfunctions tanh τp1 þ jτ to zero, where j¼73,71 such that
v¼�β1λα2þα3A2
A1; ð42Þ
A1 ¼3β1λα2
2α1; ð43Þ
B¼ 12
ffiffiffiffiffiffiffiffiffiffiffiffi�β1λ
2
r; ð44Þ
The latter shows that the solitons will exist for
β1λo0 ð45ÞHence, the topological 1-soliton solution to the KdV6 equation withconstant coefficients (14) and (15) is given by
uðx; tÞ ¼ A1 tanh2½Bðx�vtÞ�; ð46Þ
wðx; tÞ ¼ A2 tanh2½Bðx�vtÞ�; ð47Þ
where the solitons velocity is given by (42), while the free para-meters A1 and B are shown in (43) and (44), respectively.
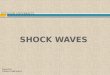
Fig. 2 represents the topological soliton profile for the KdV6equation. In this case, the parameter values that are chosen areα1¼1, α2¼2, α3¼4, β1¼1, β2¼2 and λ¼�1.
4. The second KdV6 equation
In this section, we are interested by finding the solitary waveand shock wave solutions for the proposed generalized KdV6
Fig. 1. Solitary wave profile for (a) uðx; tÞ, (b) wðx; tÞ.
H. Triki et al. / Ocean Engineering 73 (2013) 119–125 121

equation with time-dependent coefficients and linear damping:
ut ¼ aðtÞunuxþbðtÞuxxx�cðtÞwxþ f ðtÞu; ð48Þ
wxxxþdðtÞðunwÞx�kðtÞwx ¼ 0; ð49Þ
where aðtÞ, bðtÞ, cðtÞ, dðtÞ, f ðtÞ and k(t) are time-dependentcoefficients, while the parameter n indicates the power lawnonlinearity.
4.1. Solitary wave solution
To find bright soliton solutions for NLPDEs (48) and (49), weuse the following solitary wave ansatz (Biswas, 2008a, 2009):
uðx; tÞ ¼ A1ðtÞcoshp1τ
; ð50Þ
wðx; tÞ ¼ A2ðtÞcoshp2τ
; ð51Þ
where
τ¼ BðtÞ½x�vðtÞt�; ð52Þ
and
p140; p240; ð53Þ
where A1ðtÞ, A2ðtÞ, BðtÞ and vðtÞ are time-dependent parameterswhich will be determined as functions of the varying modelcoefficients aðtÞ, bðtÞ, cðtÞ, dðtÞ, f ðtÞ and kðtÞ. Here A1ðtÞ, A2ðtÞ, BðtÞand vðtÞ are, respectively, the amplitudes, the inverse width andthe velocity of the solitons. The exponents p1 and p2 will bedetermined as a function of n.
From the ansatz solutions (50) and (51), one obtains
ut ¼dA1
dt1
coshp1τ�p1A1
dBdt
ðx�vtÞ�B vþtdvdt
� �� �tanh τcoshp1τ
; ð54Þ
unux ¼�p1Anþ11 B tanh τ
coshp1ðnþ1Þτ; ð55Þ
ðunwÞx ¼�ðp1nþp2ÞAn1A2B tanh τ
coshp1nþp2τ: ð56Þ
Substituting (54)–(56) into (48) and (49), we, respectively, obtain
dA1
dt1
coshp1τ�p1A1
dBdt
ðx�vtÞ�B vþtdvdt
� �� �tanh τcoshp1τ
þap1Anþ11 B tanh τ
coshp1ðnþ1ÞτþbA1p31B
3tanh τcoshp1τ
�bA1p1ðp1þ1Þðp1þ2ÞB3tanh τ
coshp1 þ2τ
�cp2A2Btanh τcoshp2τ
� fA1
coshp1τ¼ 0; ð57Þ
and
�A2p32B3 tanh τ
coshp2τþA2p2ðp2þ1Þðp2þ2ÞB3tanh τ
coshp2 þ2τ
�dðp1nþp2ÞAn1A2Btanh τ
coshp1nþp2τþkp2A2Btanh τ
coshp2τ¼ 0: ð58Þ
From (58), once again, by the balancing principle, equating theexponents p2þ2 and p1nþp2 gives
p2þ2¼ p1nþp2; ð59Þso that
p1 ¼2n: ð60Þ
which is also obtained by equating the exponents p1þ2 andp1ðnþ1Þ in (57). Also from (57), equating the exponents p2 andp1 gives
p2 ¼ p1; ð61Þand therefore
p2 ¼ p1 ¼2n: ð62Þ
Now, from (57), the linearly independent functions are 1=coshp1
and tanh τ=coshp1 þ jτ for j¼0,2. Therefore, setting their respectivecoefficients to zero yields a set of equations:
dA1
dt�fA1 ¼ 0; ð63Þ
�p1A1dBdt
ðx�vtÞ�B vþtdvdt
� �� �þbA1p31B
3�cp2A2B¼ 0; ð64Þ
ap1Anþ11 B�bA1p1ðp1þ1Þðp1þ2ÞB3 ¼ 0: ð65Þ
Solving the above equations yields
A1ðtÞ ¼ A0eR
f ðtÞ dt ; ð66Þ
BðtÞ ¼ B0; ð67Þ
vðtÞ ¼ �4B20
n2t
ZbðtÞ dtþ 1
A0t
ZcðtÞe�
Rf ðtÞ dtA2ðtÞ dt; ð68Þ
BðtÞ ¼ naðtÞAn
0enR
f ðtÞ dt
2bðtÞðnþ1Þðnþ2Þ
" #1=2
: ð69Þ
Using Eqs. (67) and (69), one gets an important constraintequation for the soliton to exist as
Fig. 2. Topological soliton for (a)uðx; tÞ, (b) wðx; tÞ.
H. Triki et al. / Ocean Engineering 73 (2013) 119–125122

bðtÞaðtÞ ¼
n2An0e
nR
f ðtÞ dt
2B20ðnþ1Þðnþ2Þ
40: ð70Þ
Now, from (58), setting the coefficients of the linearly independentfunctions tanh τ=coshp2 þ jτ for j¼0, 2 to zero, one gets
BðtÞ ¼ n2
ffiffiffiffiffiffiffiffikðtÞ
p; ð71Þ
BðtÞ ¼ ndðtÞAn
1
2ðnþ2Þ
� �1=2: ð72Þ
Finally equating the two values of B from (71) and (72) and using(66) give the condition:
kðtÞ ¼ 2dðtÞAn0e
nR
f ðtÞ dt
nþ240; ð73Þ
which serves as a condition for the existence of bright solitonsamong the coefficients k(t), f(t) and d(t).
Thus, the bright soliton solutions to the generalized KdV6equation with time-dependent coefficients and linear damping(48) and (49) are finally given by
uðx; tÞ ¼ A1ðtÞcosh2=nfB0½x�vðtÞt�g
; ð74Þ
wðx; tÞ ¼ A2ðtÞcosh2=nfB0½x�vðtÞt�g
; ð75Þ
where the velocity v(t) and the amplitude A2ðtÞ of the w-solitonare connected by (68), while the amplitude A1ðtÞ of the u-soliton isgiven by (66). The width of the soliton pulses remains constantduring the propagation in the varying media. Finally the constraintrelations between the time-dependent model coefficients aredisplayed in (70) and (73).
4.2. Shock wave solution
In this subsection the search is going to be for shock wavesolution or topological 1-soliton solution to the generalized KdV6equation with variable coefficients given by (48) and (49). To startoff, the hypothesis is given by (Biswas, 2009; Saha et al., 2009)
uðx; tÞ ¼ A1ðtÞtanhp1τ; ð76Þ
wðx; tÞ ¼ A2ðtÞtanhp2τ; ð77Þ
where
τ¼ BðtÞ½x�vðtÞt�; ð78Þ
and
p140; p240; ð79Þ
for solitons to exist. Here, in (76)–(78), A1ðtÞ, A2ðtÞ and BðtÞ aretime-dependent free parameters and vðtÞ is the time-varyingvelocity of the wave. Also, the exponents p1 and p2 are unknownat this point and will be determined later. Therefore from theanstaz solutions (76) and (77), we have
ut ¼dA1
dttanhp1 τþp1A1
dBdt
ðx�vtÞ�B vþtdvdt
� �� �
�ðtanhp1�1 τ�tanhp1 þ1 τÞ; ð80Þ
unux ¼ p1BAnþ11 ðtanhp1ðnþ1Þ�1 τ�tanhp1ðnþ1Þþ1 τÞ; ð81Þ
ðunwÞx ¼ An1A2Bðp1nþp2Þðtanhp1nþp2�1 τ�tanhp1nþp2 þ1 τÞ: ð82Þ
Substituting (80)–(82) into (48) and (49) yields
dA1
dttanhp1 τþp1A1
dBdt
ðx�vtÞ�B vþtdvdt
� �� �ðtanhp1�1 τ�tanhp1 þ1 τÞ
�ap1BAnþ11 ðtanhp1ðnþ1Þ�1 τ�tanhp1ðnþ1Þþ1 τÞ
�bp1A1B3½ðp1�1Þðp1�2Þtanhp1�3 τ
�f2p21þðp1�1Þðp1�2Þgtanhp1�1 τ
þf2p21þðp1þ1Þðp1þ2Þgtanhp1 þ1 τ�ðp1þ1Þðp1þ2Þtanhp1 þ3 τ�
þcp2A2Bðtanhp2�1 τ�tanhp2 þ1 τÞ�fA1ðtÞtanhp1 τ¼ 0; ð83Þand
p2A2B3½ðp2�1Þðp2�2Þtanhp2�3 τ�f2p22þðp2�1Þðp2�2Þgtanhp2�1 τ
þf2p22þðp2þ1Þðp2þ2Þgtanhp2 þ1 τ�ðp2þ1Þðp2þ2Þtanhp2 þ3 τ�
þdAn1A2Bðp1nþp2Þðtanhp1nþp2�1 τ�tanhp1nþp2 þ1 τÞ
�kp2A2Bðtanhp2�1 τ�tanhp2 þ1 τÞ ¼ 0: ð84ÞFrom (84), by balancing principle, equating the exponents p2þ3and p1nþp2þ1 gives
p2þ3¼ p1nþp2þ1; ð85Þso that
p1 ¼2n: ð86Þ
which is also obtained by equating the exponents p1þ3 andp1ðnþ1Þþ1 in (83).
Also from (83), equating the exponents p2þ1 and p1þ1 gives
p2 ¼ p1; ð87Þand therefore
p2 ¼ p1 ¼2n: ð88Þ
It needs to be noted that the same value of p is yielded when theexponents p1þ1 and p1ðnþ1Þ�1 are equated with each other in (83).
Now from (83) the linearly independent functions are tanhp1 þ jτfor j¼0,73,71 (with p2 ¼ p1). Hence setting their respectivecoefficients to zero yields
dA1
dt�fA1 ¼ 0; ð89Þ
p1A1dBdt
ðx�vtÞ�B vþtdvdt
� �� �þcp2A2B
þbp1A1B3f2p21þðp1�1Þðp1�2Þg ¼ 0; ð90Þ
�p1A1dBdt
ðx�vtÞ�B vþtdvdt
� �� ��cp2A2B
�bp1A1B3f2p21þðp1þ1Þðp1þ2Þg�ap1BA
nþ11 ¼ 0; ð91Þ
ap1BAnþ11 þbp1A1B
3ðp1þ1Þðp1þ2Þ ¼ 0; ð92Þ
�bp1A1B3ðp1�1Þðp1�2Þ ¼ 0: ð93Þ
By solving (89), one obtains
A1ðtÞ ¼ A0eR
f ðtÞ dt : ð94ÞSetting the coefficients of the linearly independent functionstanhp2 þ j τ for j¼0,73,71 (with p1 ¼ p2) to zero in (84) yields
�p2A2B3f2p22þðp2�1Þðp2�2Þg�kp2A2B¼ 0; ð95Þ
p2A2B3f2p22þðp2þ1Þðp2þ2ÞgþdAn
1A2Bðp1nþp2Þþkp2A2B¼ 0;
ð96Þ
�p2A2B3ðp2þ1Þðp2þ2Þ�dAn
1A2Bðp1nþp2Þ ¼ 0; ð97Þ
H. Triki et al. / Ocean Engineering 73 (2013) 119–125 123

p2A2B3ðp2�1Þðp2�2Þ ¼ 0: ð98Þ
To solve (93) and (98), we have considered the following two cases:
4.2.1. Case I: p1 ¼ p2 ¼ 1This yields
n¼ 2; ð99ÞFurther substitution of p1 ¼ 1 into (90)–(92), respectively, gives
BðtÞ ¼ B0; ð100Þ
vðtÞ ¼ 2B20
t
ZbðtÞ dtþ 1
A0t
ZcðtÞe�
Rf ðtÞ dtA2ðtÞ dt; ð101Þ
BðtÞ ¼ �aðtÞAn0e
nR
f ðtÞ dt
6bðtÞ
" #1=2
: ð102Þ
Inserting (100) into (102) shows that solitons will exist for
bðtÞaðtÞ ¼ �An
0enR
f ðtÞ dt
6B20
o0: ð103Þ
Substituting the value p2 ¼ 1 into (95)–(97), respectively, gives
BðtÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffi�kðtÞ
2
r; ð104Þ
BðtÞ ¼ �dAn1
2
� �1=2: ð105Þ
Equating the two values of BðtÞ from (104) and (105), and using(94) give the condition:
kðtÞ ¼ dðtÞAn0e
nR
f ðtÞ dto0: ð106Þ
4.2.2. Case II: p1 ¼ p2 ¼ 2This yields
n¼ 1; ð107ÞBy substituting p1 ¼ 2 into (90)–(92), respectively, we obtain
BðtÞ ¼ B0; ð108Þ
vðtÞ ¼ 8B20
t
ZbðtÞ dtþ 1
A0t
ZcðtÞe�
Rf ðtÞ dtA2ðtÞ dt; ð109Þ
BðtÞ ¼ �aðtÞAn0e
nR
f ðtÞ dt
12bðtÞ
" #1=2
: ð110Þ
Inserting (108) into (110) shows that solitons will exist for
bðtÞaðtÞ ¼ �An
0enR
f ðtÞ dt
12B20
o0: ð111Þ
Substituting the value p2 ¼ 2 into (95)–(97), respectively, gives
BðtÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffi�kðtÞ
8
r; ð112Þ
BðtÞ ¼ �dAn1
6
� �1=2: ð113Þ
Equating the two values of BðtÞ from (112) and (113) and using (94)give the condition:
kðtÞ ¼ 43dðtÞAn
0enR
f ðtÞ dto0: ð114Þ
Lastly, we can determine the dark soliton solutions for thegeneralized KdV6 equation with variable coefficients given by(48) and (49) when we substitute (94), (100) and (101) into (76)and (77) with the respective constraints (103) and (106) for thefirst case of solution (with n¼2) or we substitute (94), (108) and(109) into (76) and (77) with the respective constraints (111) and(114) for the second case of solution (with n¼1) as
uðx; tÞ ¼ A1ðtÞtanh2=nfB0½x�vðtÞt�g; ð115Þ
wðx; tÞ ¼ A2ðtÞtanh2=nfB0½x�vðtÞt�g: ð116ÞThus, for the proposed generalized KdV6 equation (48) and (49)dark solitons will exist only when n¼1 and n¼2. This is animportant observation.
5. Results and discussions
This paper studied the KdV6 equation and obtained the solitarywave and shock wave solutions to this equation. The two modelswere considered with constant and time-dependent coefficients.The results of these analyses are pretty interesting and conveyinteresting messages. It was observed that the coefficients of thedispersion term, nonlinear term and other coefficients cannot bepicked arbitrarily. There are constraint conditions that bind theirchoices. The numerical simulations additionally support theseanalytical developments.
6. Conclusions
We have derived bright and dark soliton solutions of twovariants of the KdV6 equation with arbitrary coefficients. The firstmodel is a family of the KdV6 equation with constant coefficients,while the second one is an important generalization of the KdV6equation having t-dependent coefficients, power law nonlinearityand linear damping term. The solitary wave ansatz method waseffectively used to achieve the goal set for this work. The condi-tions of existence of solitons are presented. The proposed methodpermits to obtain in a straight manner exact bright and darksoliton solutions for the equations under discussion. Note that, it isalways useful and desirable to construct exact solutions especiallysoliton-type envelope for the understanding of most nonlinearphysical phenomena.
References
Ablowitz, M.J., Clarkson, P.A., 1991. Solitons, Nonlinear Evolution Equations andInverse Scattering Transform. Cambridge University Press, Cambridge.
Biswas, A., 2008a. 1-Soliton solution of the K(m, n) equation with generalizedevolution. Physics Letters A 372, 4601–4602.
Biswas, A., 2008b. 1-Soliton solution of (1þ2) dimensional nonlinear Schrödinger'sequation in dual-power law media. Physics Letters A 372, 5941–5943.
Biswas, A., 2009. 1-Soliton solution of the B(m, n) equation with generalizedevolution. Communications in Nonlinear Science and Numerical Simulation 14,3226–3229.
Biswas, A., Milovic, D., 2010. Bright and dark solitons of the generalized nonlinearSchrödinger's equation. Communications in Nonlinear Science and NumericalSimulations 15, 1473–1484.
Fan, E., 2000. Extended tanh-function method and its applications to nonlinearequations. Physics Letters A 277, 212–218.
Da-Feng, Z., 2010. A super generalization of KdV6 equation. Communications inTheoretical Physics 54 (6), 962–964.
Gomez, C.A., Salas, A.H., Frias, B.A., 2010. Exact solutions to KdV6 equation by usinga new approach of the projective Riccati equation method. MathematicalProblems in Engineering 2010, 797084.
Karsau-Kalkani, A., Karsau, A., Sakovich, A., Sarkovich, S., Turhan, R., 2008. A newintegrable generalization of the KdV equation. Journal of Mathematical Physics49, 073516.
Kupershmidt, B.A., 2008. KdV6: an integrable system. Physics Letters A 372,2634–2639.
H. Triki et al. / Ocean Engineering 73 (2013) 119–125124

Li, J., Zhang, Y., 2010. The geometric property of soliton solutions to the integrableKdV6 equation. Journal of Mathematical Physics 51 (4), 043508.
Li, J., Zhang, Y., 2012. The exact traveling wave solutions to two integrable KdV6equations. Chinese Annals of Mathematics, Series B 33 (2), 179–190.
Parkes, E.J., Duffy, B.R., 1996. An automated tanh-function method for findingsolitary wave solutions to non-linear evolution equations. Computer PhysicsCommunications 98, 288–300.
Saha, M., Sarma, A.K., Biswas, A., 2009. Dark optical solitons in power law mediawith time-dependent coefficients. Physics Letters A 373, 4438–4441.
Salas, A.H., Gomez, C.S., 2010. Exact solution of the KdV6 and mKdV6 equations viatanh–coth and sech methods. Applications and Applied Mathematics 5 (10),1504–1510.
Triki, H., Wazwaz, A.M., 2009. Bright and dark soliton solutions for a K(m, n)equation with t-dependent coefficients. Physics Letters A 373, 2162–2165.
Wang, M., 1996. Exact solutions for a compound KdV–Burgers equation. PhysicsLetters A 213, 279–287.
Wang, M., Zhou, Y., Li, Z., 1996. Application of a homogeneous balance method toexact solutions of nonlinear equations in mathematical physics. Physics LettersA 216, 67–75.
Wang, M.L., Li, X.Z., 2005. Applications of F-expansion to periodic wave solutionsfor a new Hamiltonian amplitude equation. Chaos, Solitons & Fractals 24,1257–1268.
Wang, M., Li, X., Zhang, J., 2008. The G′=G�expansion method and travelling wavesolutions of nonlinear evolution equations in mathematical physics. PhysicsLetters A 372, 417–423.
Wazwaz, A.M., 2004a. Distinct variants of the KdV equation with compact andnoncompact structures. Applied Mathematics and Computation 150, 365–377.
Wazwaz, A.M., 2004b. Variants of the generalized KdV equation with compact andnoncompact structures. Computers and Mathematics with Applications 47,583–591.
Yan, Z., 2001. New explicit travelling wave solutions for two new integrable couplednonlinear evolution equations. Physics Letters A 292, 100–106.
Yao, Y.Q., Zeng, Y.B., 2008. The bi-Hamiltonian structure and new solutions of KdV6equation. Letters in Mathematical Physics 86, 193–208.
Zhou, Y., Wang, M., Wang, Y., 2003. Periodic wave solutions to a coupled KdVequations with variable coefficients. Physics Letters A 308, 31–36.
H. Triki et al. / Ocean Engineering 73 (2013) 119–125 125