Embed Size (px)
Citation preview

Solenoid map accessin athena
Paul S Miyagawa, Steve SnowUniversity of Manchester

Outline• Transition from solenoid map to
ATLM• Transition region boundaries• Implementation in athena• Field values in transition region
– Barrel– Ends
• Future work
Paul S Miyagawa Magnetic field meeting, 4 February 2008 2/8

Transition from solenoid map to ATLM
• Solenoid map results valid in region |z|<2.85m, r<1.10m– ATLM model used outside this region
• Aim to have field components Bx, By, Bz returned by magnetic field service be continuous across transition from solenoid map to ATLM
• Need to allow small translation and rotation of solenoid field independent to the rest of the field– Main error in solenoid map is systematic
uncertainty of ±0.2 mrad in orientation– Orientation can be determined from real data using
resonance masses
Paul S Miyagawa Magnetic field meeting, 4 February 2008 3/8

Transition region boundaries
Paul S Miyagawa Magnetic field meeting, 4 February 2008
|z| < 2.820 m, r < 1.075 m– 100% solenoid map
|z| > 2.830 m, r > 1.085 m– 100% ATLM model
else– Use weighted mixture– Weights proportional to
shortest distance to boundaries
Binterp = ( Bmap *s2 + BATLM * s1 ) / (s1+s2)
4/8

Implementation in athena• Code has been implemented and tested in athena 13.0.30
– C++ classes provide user interface– Actual field calculations done in Fortran
• During job initialisation:– Solenoid field values at defined grid points are read into memory during job
initialisation– For displacements and rotations to the solenoid field, the field values are
recalculated at the same grid points during job initialisation– Displaced/rotated values are calculated by finding the equivalent point in
the original map and interpolating– New values saved as an additional copy of the map (~1 MB per map, ~2
sec for recalculation)• During job running:
– User requests field values at particular points from magnetic field service– Field service determines in which region the point lies and calls the
appropriate subroutine– For solenoid + transition regions, solenoid field values at specified point
calculated from the displaced/rotated map by simple linear interpolation between grid points
Paul S Miyagawa Magnetic field meeting, 4 February 2008 5/8

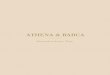
Transition region in barrel
• Small (0.03 T) mismatch between solenoid measurement and ATLM– Will become smaller with next ATLM
version• Transition is linear interpolation
over 1 cm between maps
Paul S Miyagawa Magnetic field meeting, 4 February 2008
solenoid map ATLM modelBz versus R at Z=0
6/8

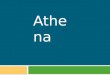
Transition region in ends
Paul S Miyagawa Magnetic field meeting, 4 February 2008
Bz and Br versus Z at R=0.5 m
solenoid map ATLM model
7/8

Future work• More comprehensive testing of field
values from transition region– Especially corners
• Tilted version implemented, but not yet tested
• Test in nightlies for release 14
Paul S Miyagawa Magnetic field meeting, 4 February 2008 8/8



![Athena Optics.ppt [Kompatibilitätsmodus] · ATHENA Optics First German ATHENA Science Workshop, January 13, 2012, Garching, Germany 1 ... (ESA led studies for XEUS/IXO/Athena) •](https://img.pdfslide.us/doc/110x75/5e7c8b679ccbb82b722f38d8/athena-kompatibilittsmodus-athena-optics-first-german-athena-science-workshop.jpg)



















![ATHENA - Coordinate System Document...[RD02] ATHENA Mission Requirements Document (MRD), ATHENA-ESA-URD-0010 [RD03] ATHENA Product Tree, ATHENA-ESA-PT-0001 [RD04] Ariane 5 User’s](https://img.pdfslide.us/doc/110x75/5ff23cd84225de2c7f4f21b6/athena-coordinate-system-document-rd02-athena-mission-requirements-document.jpg)