Embed Size (px)
Citation preview

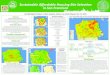
Prototype Allocation Checked in A 3D Environment
Jenness Repeating Shapes generate an allocation method that completely covers a 2D surface.However, it does not always translate into the complete coverage in 3D world – the elevationdifference, for example, might create gaps between two Bluetooth towers’ coverage. To double checkour allocation plan, we created a 3D buffer of 5 miles from our Bluetooth towers and displayed themon the TIN surface
GIS AnalysisProblem
The current model of rescue is shown by the figure below:
Someone in distress would have to find cell reception or a park ranger toalert emergency personnel. If the person is injured, hopefully they have afriend to do this. Regardless, finding help in this situation can take a lot oftime. To change this, we introduce Bluetooth signal boxes to Yosemite toaid those in distress in getting their location to emergency personnelquickly and effectively. This technology combines solar panels andBluetooth range extenders. Someone can now connect to these towers, viaany Bluetooth enabled device, wherever they are to send out a distresssignal and their position. This is done by intersections of the various towersthe person connects to. This technology would cut down the time andresources spent to locate someone in need of help. The model wouldtransform to look like this:
Solution & Technology
Result
Setting the buffer spheres to transparent allows us tovisualize the overlap and the coverage of our Bluetoothstations in 3D. Occasional insufficient overlap wasobserved in the first iteration, mainly due to thelimitation that small patches of suitability polygons arenot picked up by the Jenness Repeating Patterns.
After visualizing the regions with weaker coverage, weadjusted the locations some towers. The seconditeration of the 3D buffers following the reallocationshows that the Bluetooth tower network meet ourcriteria: all major trails are enclosed, sufficient overlapbetween neighboring towers, complete connection evenin the 3D world that indicates full coverage andconnectivity.
The 5 miles effective range makes the elevationdifference in Yosemite (usually within 2,000 feet, whichis 0.38 miles) less of an issue.
AcknowledgementsJenness Enterprice – Jenness Repeating Shapes
http://media.idownloadblog.com/wp-content/uploads/2014/06/Yosemite.jpg - Yosemite Background
https://irma.nps.gov/App/ - Yosemite GIS Data
http://nationalmap.gov/ - Yosemite Elevation Data
Professor John Radke
Datum: NAD83_UTM_11N|Projection: Transverse Mercator
Sol Kim, Yuhan Zhang, Shiqiao Yan | University of California, Berkeley | Geography C188 Final Project | December 12th 2014
Discussion
After obtaining the best suitability polygon, we used JennessRepeating Shapes extension to create uniformly distributedpoints in triangular pattern. We developed a circular patternthat, when blue tooth towers are at the center of the circle,and its range equals the radius of the circle, then the whole2D area will be completely covered by this pattern. Usingthe effective range of 5 miles, the distance between theneighboring points is calculated by:
d = 5 miles*cos(30 deg)*2*1610 meters/mile = 14000 meters (side of the equilateral triangle)
Bluetooth towers (blue spots) floating on the 3D TIN surface in ArcScene. A 3D buffer is created around these towers.
Triangulated Irregular Network (TIN) Model
A 30-meter (contour interval) TIN surface is built from the digital elevation rasteracquired from USGS 1arcsecond elevation database. The TIN surface is used togenerate a slope raster layer and a solar radiation raster layer using ArcMap 3DAnalyst Tools.
USGS 1arcsecond DEM tiff and TIN surface (left); Canopy cover layer used to derive the canopy constraint layer (right)
Constraint Map in Raster
Opportunity Maps
To create an opportunity map the following layers were used: trails, roads, campgrounds, climbingareas, and rock hazard zones. A 2 mile buffer was made around all of the fields aside from rockhazard zones which received a 0.25 mile buffer. The reasoning behind the buffer is that these areashave the highest density of people and receive the most traffic increasing the chance of someonegoing missing or getting injured. Missing and injured visitors are almost always located within acouple miles from trails, roads, or campgrounds.
After buffering these layers, a weight was given to each layer as follows: +2 for trails, campgrounds,and climbing areas; +1 for roads and rock hazard zones. A union was performed on these layers anda new field consisting of the sum of the various layers was created generate the opportunity layer.
We used three raster layers to produceour constraint layer: the slope and thesolar radiation generated from the TINsurface and a canopy layer (YosemiteNational Park GIS dataset). Slopes above30 percent are considered constraintswith a uniform weight -1. Solaravailability is crucial to the success ofsolar-powered blue tooth towers, so theconstraint map assigns graded weightsfrom -1 to -3 to insufficient solarradiation and excessive canopy cover.Adding the 3 constraints layer togetherusing the Map Algebra tour, we obtaineda raster total constraint layer.
Shown to the left is: trails +trails buffer (top left), roads +roads buffer (bottom left),climbing buffer (grey) + rockhazard buffer (brown outline)(bottom right). *Not shown isthe campground buffer. Thesecombine to create the finalopportunity layer (top right).
This clip shows a combine of two factormaps for the final constraint layer,including a 200 meters buffer layer ofrivers and lakes and a buffer layer ofwetlands, we assigned a weight of -3 forthe rivers and lakes, and -2 for wetlands.
Constraint Map in Vector
Allocation Of Bluetooth Towers Based On The Suitability Analysis
Allocation Strategy-building suitability model
Trails 2 mile Buffer
Roads 2 mile Buffer
Campgrounds 2 mile Buffer
Climbing Areas 2 mile Buffer
Rock Hazard Areas 0.25 mile buffer
Opportunity Union map
Constraints Union map
Steep Slope
Solar Radiation
Canopy Cover
Wetlands 200m Buffer
Rivers and Lakes 200m Buffer
FinalSuitability map
+
In suitable areas with weight more than 2
Use Jenness Enterprises Repeating ShapesCreating Point Location for Emergency Tower
3D buffer enduring overlapping
vector vector
HELP
HELP
Location
Yosemite National Park in California is one of the most wellknown and visited national parks in the U.S. Every year thepark receives millions of visitors and approximately 250emergency calls. Responding to these emergencies cantake much time, money, and effort. YOSAR (Yosemite’sSearch and Rescue) missions can range from month-long,$100,000 effort, to a two-hour, two-person assist.
How can public safety in Yosemite be affordably improvedwhile preserving the natural of the park?
By using a suitability analysis based upon appropriateopportunities and constraints, strategic locations thatwould maximize utility have been determined to placethe Bluetooth towers. The towers were initially equallyspaced throughout the suitable regions. Using a 3Dbuffer, the range of the towers and their overlap wasvisually analyzed. More towers were added manually tooptimize the amount of coverage and overlap. Theoptimum number of towers was determined to be 51.
The cost of 51 units is based on:Bluetooth Extender from AirCable: 28mi radius, $3003W Solar Panel with Battery Charger: 30000mAh, $15Cost per unit: $31551 units: $315 * 51 = $16,065
This is extremely affordable especially when thistechnology has the capacity to first and foremost savelives. These towers can also save time and money forYOSAR by reducing the time spent conducting search andrescue missions. We strongly believe this technology canbe reasonably implemented to bolster public safetywithout infringing on the natural beauty of YosemiteNational Park.