Embed Size (px)
Citation preview

PID CONTROLLER TUNING 2011
INDEX
S.no Name of the chapter1. Introduction to PID controllers1.1 Feedback controllers1.2 Reset windup 1.3 Controller architecture2. Controller tuning2.1 Ziegler-nichols' and related methods2.2 The Chien, Hrones and Reswick Method2.3 Internal model controller2.4 Relay –auto tuning2.5 Reaction curve method 3. Literature survey3.1 Analytical methods3.2 Methods of optimization3.3 Fuzzy PID
Proposed work References
1

PID CONTROLLER TUNING 2011
CHAPTER 1
INTRODUCTION TO PID CONTROLLERS
1.1 FEEDBACK CONTROLLERS:- The controller is the “brain” of the control loop. it is the device that performs the decision
operation in the control system. To do this, the controller:-
Compares the process signal it receives, the controlled variable, with the set point.
The set point is the desired value of the process signal.
Sends an appropriate output signal to the control valve, or any other final control
element, in order to maintain the controlled variable at its set point.
ACTION OF CONTROLLERS:-
Consider the heat exchanger control loop shown in Fig. 1.1; the process is at steady state, and
the set point is constant. Assume that the signal from the temperature transmitter increases,
indicating that the outlet temperature has increased above set point. To return this
temperature to set point, the controller must close the steam valve by some amount. Because
the valve is fail-closed (FC), the controller must reduce its output signal to the valve (see the
arrows in the figure). When an increase in the process variable requires a decrease in
controller output, the controller must be set to reverse action. Often the term
increase/decrease (as the input signal to the controller increases, the output signal from the
controller must decrease), or simply decrease, is also used. Alternatively, consider the level
control loop shown in Fig. 1.2; the process is at steady state, and the set point is constant.
Assume that the signal from the level transmitter increases, indicating that the level has
increased above the set point. To return this level to set point, the controller must open the
valve by some amount. Because the valve is fail-closed (FC), the controller must increase its
output signal to the valve (see the arrows in the figure). To make this decision, the controller
must be set to direct action. Often the term increase/increase (as the input signal to the
controller increases, the output signal from the controller must also increase), or simply
increase, is also used.
In summary, to determine the action of a controller, the engineer must know
The process requirements for control.
The fail-safe action of the control valve or other final control element.
2

PID CONTROLLER TUNING 2011
FIG1.1- FEEDBACK LOOP FOR
HEAT
EXCHANGER
FIG1.2- FEEDBACK LOOP FOR LIQUID LEVEL CONTROL
3

PID CONTROLLER TUNING 2011
The signals entering and exiting the controllers are either electrical or pneumatic. Even in
computer systems, the signals entering from the field are electrical before they are converted,
by an analog-to-digital (A/D) converter, to digital signals. Likewise, the signal the computer
system sends back to the field is an electrical signal. To help simplify the presentation that
follows, we will use all signals in percent. That is, we will speak of 0 to 100% rather than 4 to
20 mA, 3 to 15 psig, or any other type of signal.
Feedback controllers decide what to do to maintain the controlled variable at set point by
solving an equation based on the difference between the set point and the controlled variable.
This difference, or error, is computed as:-
________________________________(1.1)
Where,
c(t) = controlled variable. Most often, the controlled variable is given by the transmitter
output (TO) and consequently has units of %TO.
r(t) = set point. This is the desired value of the controlled variable and thus has units of %TO.
e(t) = error in %TO.
Proportional Controller
The proportional controller is the simplest type of controller we will discuss. The equation
that describes its operation is.
______________________________________(1.2)
m(t) = controller output, %CO. The term m (t) is used to stress that as far as the controller is
concerned, this output is the manipulated variable.
Kc = controller gain,
= bias value, %CO. This is the output from the controller when the error is zero. The
value is a constant and is also the output when the controller is switched to manual. It is
very often initially set at mid-scale, 50 %CO.
The output of the controller is proportional to the error between the set point and the
controlled variable. The proportionality is given by the controller gain, Kc. As a result of our
definition of error, when Kc is positive, an increase in the controlled variable, c(t), results in a
decrease in controller output, m(t).
Proportional-Integral Controller(PI) :-
4

PID CONTROLLER TUNING 2011
Most processes cannot be controlled with an offset; that is, they must be controlled at the set
point. In these instances, an extra amount of intelligence must be added to the proportional
controller to remove the offset. This new intelligence, or new mode of control, is the integral,
or reset, action; consequently, the controller becomes a proportional- integral (PI) controller.
The describing equation is
_____________________(1.3)
Where is the integral (or reset) time. Most often, the time unit used is minutes; less often,
seconds are used. The unit used depends on the manufacturer. Therefore, the PI controller has
two parameters, Kc and both of which must be adjusted (tuned) to obtain satisfactory
control.
proportional-integral controllers have two tuning parameters: the gain or proportional band
and the reset time or reset rate. Their advantage is that the integration removes the offset.
Close to 85% of all controllers in use are of this type.
Proportional-Integral-Derivative(PID) controller: -
Sometimes another mode of control is added to the PI controller. This new mode of control is
the derivative action, which is also called the rate action, or preact. Its purpose is to anticipate
where the process is heading by looking at the time rate of change of the error, its derivative.
The describing equation is.
____________________________(1.4)
The PID controller has three terms, Kc or PB, , or (reset rate), and , that must be
adjusted (tuned) to obtain satisfactory control. The derivative action gives the controller the
capability to anticipate where the process is heading-that is, to “look ahead”-by calculating
the derivative of the error. The amount of “anticipation” is decided by the value of the tuning
parameter, .
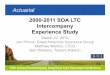
1.2 Reset Windup:-
The problem of reset windup is an important and realistic one in process control. It may occur
whenever a controller contains the integral mode of control. Let’s use the heat exchanger
control loop shown in Fig. 1.1 to explain this problem. Suppose that the process inlet
temperature drops by an unusually large amount. This disturbance will reduce the outlet
5

PID CONTROLLER TUNING 2011
temperature. The controller (PI or PID) will in turn ask the steam valve to open. Because this
is a fail-closed valve, the signal from the controller will increase until, because of the reset
action, the outlet temperature equals the desired set point. But suppose that in restoring the
controlled variable to set point, the
controller integrates up to 100%
because the drop in inlet temperature
is too large. At this point the steam
valve is wide open, so the control loop cannot do any more. Essentially, the process is out of
control. This is demonstrated graphically in Fig. 1.3, which shows that when the valve is fully
open, the outlet temperature is not at set point. Because there is still an error, the controller
will try to correct for it by further increasing (integrating the error) its output, even though the
valve will not open more after 100%. The output of the controller can in fact integrate above
100%. Some controllers can integrate between - 15% and 115%, others between - 7% and
107%, and still others between - 5% and 105%. Analog controllers can also integrate outside
their limits of 3 to 15 psig, or 4 to 20 mA. Let us suppose the controller being used can
integrate up to 107%. At that point, the controller cannot increase its output anymore; its
output has saturated. This state is also shown in Fig. 1.3. This saturation is due to the reset
action of the controller and is referred to as reset windup.
6

PID CONTROLLER TUNING 2011
FIG-1.3 Heat exchanger control-reset windup.
1.3 CONTROLLER ARCHITECTURE:-
The ideal continuous time domain PID controller for a SISO process is expressed in the Laplace
domain as follows:
______________________(1.5)
With,
__________________(1.6)
And with Kc = proportional gain, Ti = integral time constant and Td = derivative time
constant. If and Td =0 (P-control), then it is clear that the closed loop measured value
y will always be less than the desired value r (for processes without an integrator term, as a
positive error is necessary to keep the measured value constant, and less than the desired
value). The introduction of integral action facilitates the achievement of equality between the
measured value and the desired value, as a constant error produces an increasing controller
output. The introduction of derivative action means that changes in the desired value may be
anticipated, and thus an appropriate correction may be added prior to the actual change. Thus,
in simplified terms, the PID controller allows contributions from present controller inputs,
past controller inputs and future controller inputs.
Many variations of the PID controller structure have been proposed (indeed, the PI controller
structure is itself a subset of the PID controller structure). The controller structures specified
are detailed below.
a. Ideal PI controller:-
______________________________ (1.7)
b. Ideal PID controller
______________________________(1.8)
7

PID CONTROLLER TUNING 2011
c. Ideal controller in series with first order lag :-
_______________________(1.5)
d. Controller with filtered derivative:-
______________________________(1.6)
e. Classical controller:-
This controller is also labelled the ‘cascade’ controller the ‘interacting’ or ‘series’
controller the ‘interactive’ controller , the ‘rate-before-reset’ controller , the ‘analog’
controller or the ‘commercial’ controller.
______________________________(1.7)
A subset of the classical PID controller is the so-called ‘series’ controller structure, also
labelled the ‘interacting’ controller or the ‘analog algorithm’ or the ‘dependent’ controller .
_____________________________(1.8)
f. Generalised classical controller:-
______________(1.9)
g. Two degree of freedom controller 1:
________(1.10)
This controller is also labelled the ‘m-PID’ controller, the ‘ISA-PID’ controller and
the ‘P-I-PD (only P is DOF) incomplete 2DOF algorithm’ . Notable subsets of this
controller structure are:-
8

PID CONTROLLER TUNING 2011
________________(1.11)
_______________________(1.12)
Also labelled the ‘PI+D’ controller structure or the dependent, ideal, non-interacting
controller structure.
h. Two degree of freedom controller 2:-
____________(1.13)
Where,
____________________________(1.14)
i. Two degree of freedom controller 3:
__________________________(1.15)
Where,
_______(1.16)
And,
_________(1.17)
Notable subsets of this controller structure are:
__________________(1.18)
Also labelled the ‘reset-feedback’ controller structure.
9

PID CONTROLLER TUNING 2011
_____________________(1.19)
Also labelled the ‘industrial controller’ structure.
_______________(1.20)
CHAPTER-2
CONTROLLER TUNING
2.1 ZIEGLER-NICHOLS' AND RELATED METHODS:-
Two classical methods for determining the parameters of PID controllers were presented by
Ziegler and Nichols in 1942. These methods are still widely used, either in their original form
or in some modification. They often form the basis for tuning procedures used by controller
manufacturers and process industry. The methods are based on determination of some
features of process dynamics. The controller parameters are then expressed in terms of the
features by simple formulas.
THE STEP RESPONSE METHOD
The first design method presented by Ziegler and Nichols is based on a registration of the
open-loop step response of the system, which is characterized by two parameters. The
10

PID CONTROLLER TUNING 2011
parameters are determined from a unit step response of the process, as shown in Figure
2.1 .The point where the slope of the step response has its maximum is first determined, and
the tangent at this point is drawn. The intersections between the tangent and the coordinate
axes give the parameters a and L. This corresponds to modeling a process by an integrator
and a time delay. Ziegler and Nichols have given PID parameters directly as functions of a
and L.These are given in Table 2.1. An estimate of the period Tp of the closed-loop system is
also given in the table.
FIG2.1 - Characterization of a step response in the Ziegler-Nichols step response method.
TABLE -2.1 PID controller parameters obtained from the Ziegler-Nichols step response method.
11

PID CONTROLLER TUNING 2011
Measurements on the step response give the parameters a = 0.218 and L = 0.806. The
controller parameters can now be determined from Table 2.1. The parameters of a PID
controller are K = 5.50, Ti = 1.61, and Td = 0.403. The behaviour of the controller is as can
be expected. The decay ratio for the step response is close to one quarter. It is smaller for the
load disturbance. The overshoot in the set point response is too large.
The Frequency Response Method
This method is also based on a simple characterization of the process dynamics. The design is
based on knowledge of the point on the Nyquist curve of the process transfer function G(s)
where the Nyquist curve intersects the negative real axis. For historical reasons this point is
characterized by the parameters Ku and Tu, which are called the ultimate gain and the
ultimate period. These parameters can be determined in the following way. Connect a
controller to the process, set the parameters so that control action is proportional, i.e., Ti =
and Td = 0. Increase the gain slowly until the process starts to oscillate. The gain when this
occurs is Ku and the period of the oscillation is Tu. Ziegler-Nichols have given simple
formulas for the parameters of the controller in terms of the ultimate gain and the ultimate
period (seeTable2.2). An estimate of the period Tp of the dominant dynamics of the closed-
loop system is also given in the table.
Fig-2.2 Set point and load disturbance response of a process with transfer function l/(s + l ) 3
controlled by a PID controller tuned with the Ziegler-Nichols step response method. The
diagrams show set point ysp, process output y, and control signal u.
Table 2.2 PID controller parameters obtained from the Ziegler-Nichols frequency response
method.
12

PID CONTROLLER TUNING 2011
2.2 The Chien, Hrones and Reswick Method:-
There has been many suggestions of modifications of the Ziegler-Nichols methods. Chien, Hrones and
Reswick (CHR) changed the step response method to give better damped closed-loop systems. They
proposed to use "quickest response without overshoot" or "quickest response with 20% overshoot" as
design criteria. They also made the important observation that tuning for set point response or load
disturbance response are different. To tune the controller according to the CHR method, the
parameters a and L of the process model are first determined in the same way as for the Ziegler-
Nichols step response method. The controller parameters for the load disturbance response method are
then given as functions of these two parameters.
The tuning rules based on the 20% overshoot design criteria in Table 2.3 are quite similar to
the Ziegler-Nichols step response method presented in Table 2.1. However, when the 0%
overshoot design criteria is used, the gain and the derivative time are smaller and the integral
time is larger. This means that the proportional action, the integral action, as well as the
derivative action, are smaller. In the set point response method, the controller parameters are
not only based on a and L, but also on the time constant T. Methods to obtain these
parameters were presented in Section 2.4. The tuning rules for setpoint response are
summarized in Table 2.4.
Table 2.3 Controller parameters obtained from the Chien, Hrones and Reswick load
disturbance response method.
13

PID CONTROLLER TUNING 2011
Table 2.4 Controller parameters obtained from the Chien, Hrones and Reswick setpoint
response method.
2.3 The Internal Model Controller (IMC) : -
The internal model principle is a general method for design of control systems that can be
applied to PID control. A block diagram of such a system is shown in Figure 4.21. In the
diagram it is assumed that all disturbances acting on the process are reduced to an equivalent
disturbance d at the process output. In the figure Gm denotes a model of the process, is
an approximate inverse of Gm, and Gf is a low pass filter. The name internal model controller
derives from the fact that the controller contains a model of the process internally. This model
is connected in parallel with the process. If the model matches the process, i.e., Gm = Gp, the
signal is equal to the disturbance d for all control signals u. If Gf = 1 and Gj, is an exact
inverse of the process, then the disturbance d will be cancelled perfectly. The filter Gf is
introduced to obtain a system that is less sensitive to modelling errors. A common choice is
Gf(s) = 1/(1 + sTf), where Tf is a design parameter.
14

PID CONTROLLER TUNING 2011
Figure 2.3 Block diagram of a closed-loop system with a controller based on the internal
model principle.
The controller obtained by the internal model principle can be represented as an ordinary
series controller with the transfer function
_________________________(2.1)
From this expression it follows that controllers of this type cancel process poles and zeros.
The internal model principle will typically give controllers of high order. By making special
assumptions it is, however, possible to obtain PI or PID controllers from the principle
An interesting feature of the internal model controller is that robustness is considered
explicitly in the design. Robustness can be adjusted by selecting the filter Gf properly. A
trade-off between performance and robustness can be made by using the filter constant as a
design parameter. The IMC can be designed to give excellent response to set point changes.
Since the design method inherently implies that poles and zeros of the plant are cancelled, the
response to load disturbances may be poor if the cancelled poles are slow in comparison with
the dominant poles.
2.4 RELAY AUTO –TUNING (ASTROM & HAGGLUND ’84):-
Alternative to continuous cycling method to find Kc & Pu. F.B controller temporally replaced
by an ON –OFF controller (or Relay). After the control loop is closed, controlled variables
shows sustained oscillation (due to on –off). Operation of relay auto- tuner includes a dead
15

PID CONTROLLER TUNING 2011
band to avoid frequent switching caused by measurement noise. Process is operated in closed
loop, so that output does not drift away from desired target value. Relay is used with
hysteresis, so that the system is less sensitive to measurement noise.
Pu is the period of oscillation for the process output.
Kcu = 4d / πa
where, d = relay amplitude (set by user)
and a = measured amplitude of process oscillation
PID controller settings can be obtained as for Z-N.
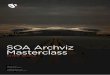
2.5 REACTION CURVE METHOD: -
16
S.P. ProcessPID
e
+
Relay with dead zone.
Controller O/P
PV
Pu
a
2d

PID CONTROLLER TUNING 2011
It is an Open loop method by Cohen-Coon.Response to step I/P; only for system with self
regulation. Loop opened between controller and valve; controller on manual.
Reaction rate:
with correction by Cohen & Coon for Qr. Amplitude damping, the log ratio is
For P :
With correction :
For PI :
17
R SFCEcontroller
Ce
H
+
p
NLR
c

PID CONTROLLER TUNING 2011
With correction:
For PID :
With correction:
CHAPTER-3
18

PID CONTROLLER TUNING 2011
LITERATURE SURVEY
This literature survey can be divided in three categories:-
Analytical methods
Methods of optimization
Fuzzy PID
3.1 Analytical methods:-
[1]. E. K. Ho and W. Xu, “PID tuning for unstable processes based on gain and phase
margin specifications,” IEEE Proc. Inst. Elect. Eng. D, vol. 145, no. 5, pp. 392–396, May
1998.
Work done: - In the paper, simple formulas are derived to tune the PID controller for unstable processes to
meet gain and phase margin specifications. The stability of the closed-loop system is ensured
by the Nyquist stability criterion. These formulas are derived for first- and second-order
processes with time delay.
Gain and phase margins have always served as important measures of robustness. It is known
from classical control that the phase margin is related to the damping of the system and
therefore can also serve as a performance measure.
Robustness is clearly a key issue for control systems, and gain and phase margins are
important indicators. Simple formulas will be derived in this paper to tune the PID controller
for unstable processes to meet gain and phase-margin specifications. The stability of the
closed-loop system is ensured by the Nyquist stability criterion. These formulas are derived
for firs -order unstable processes with time delay.
Models of controller and process considered: -
Denote the process and controller transfer functions by Gp(s) and Gc(s) respectively. The PI
controller is given by :-
_________________________________________________(3.1)
The first-order plus dead-time unstable process model is given by:
___________________________________________________(3.2)
RESULTS: -
19

PID CONTROLLER TUNING 2011
The tuning formulas derived for the given phase and gain margin specifications were
_________________________________________________(3.3)
And
_______________________________________(3.4)
Where
____________________________________(3.5)
is the phase cross over frequency.
is the gain margin.
is the phase margin.
Also, using the above tuning formulas the gain and phase margins obtained are quite close to
the specified ones. The largest error in gain margin is 1%. The largest error in phase margin
is 4.9%). Such errors are within acceptable limits.
LIMITATION:-
The limitations of the method described and the PI- controller parameters derived is that the
above tuning parameters can only be used for the systems having
Where, L is the dead time and is the first order lag.
[2] G.P. Liu and S. Daley, “Optimal-tuning PID control for industrial systems”,
journal of control engineering practices (Elsevier), vol.9, pp-1185-1194, 2001
Work done: - Three optimal-tuning PID controller design schemes are presented for
industrial control systems in this paper. They are time domain Optimal-tuning PID control,
frequency-domain optimal-tuning PID control and multiobjective optimal-tuning PID control.
since only a small amount of information on the dynamic behaviour of the process is used, in
many situations they do not provide good enough tuning or produce a satisfactory closed-
loop response. For example, in practice, the Ziegler–Nichols rule often leads to a rather
oscillatory response to set point changes.
20

PID CONTROLLER TUNING 2011
In fact, to have required system performance specifications, PID controller design of
industrial systems is complicated by a number of factors:
The system has non-linearity such as directionally dependent actuator and plant
dynamics;
Various uncertainties, such as modelling error and external disturbances, are involved
in the system.
Sub-optimal tuning may be necessary to cater for changes in the system with time
such as ageing and general wear.
Commissioning is easiest without load, but the load is often variable and affects the
dynamic performance.
The schemes described in this paper generally consist of four basic parts: model estimation,
desired system specifications, optimal tuning mechanism and an online PID controller. The
Model estimation provides a parametric/non-parametric model for the process. The desired
system specifications include a set of control requirements of the process. The optimal-tuning
mechanism finds optimal parameters for the PID controller so that the desired system
specifications are satisfied. These optimal-tuning PID control schemes are demonstrated
through their applications to a hydraulic Position control system, a rotary hydraulic speed
control system and a gasifier.
Time domain optimal tuning:
In the time domain, specifications for a control system design involve certain requirements
associated with the time response of the system. The requirements are often expressed in
terms of the standard quantities on the rise time, settling time, overshoot, peak time, and
steady state error of a step response.
The PID design technique in this technique in this method can be stated as minimization of
the cost function given by:-
____________________________________(3.6)
Statistical considerations show that the performance function J is the most appropriate choice
for data fitting when errors in the data have a normal distribution. The function J is often
preferred because it is known that the best fitting calculation is straight forward to solve.
21

PID CONTROLLER TUNING 2011
Fig-3.1 The time-domain optimal-tuning PID control scheme.
Frequency domain tuning
In the frequency-domain, there are two quantities used to measure the stability margin of the
system. One is the gain margin, which is the factor by which the gain is less than the neutral
stability value. The other is the phase margin, which is the amount by which the phase of the
system exceeds -1800 when the system gain is unity. The gain and phase margins are also
related to the damping of a system. In addition to the stability of a design, the system is also
expected to meet a speed-of response specification like bandwidth. The crossover frequency,
which is the frequency at which the gain is unity, would be a good measurement in the
frequency domain for the system’s speed of time response.
In this he design of PID controller is given by minimization of following cost function
__________________________________ (3.7)
22

PID CONTROLLER TUNING 2011
The control topology adopted in this method is:
Fig-3.2 Frequency-domain optimal-tuning control scheme.
Multiobjective optimal-tuning PI control for a gasifier: -
In this paper this technique has been applied on the gasifier of integrated gasification
combined cycle (IGCC) power plants. A set of multiobjective performance criteria based on
the specifications for the system outputs, inputs and input rates are formulated as functions of
the parameters of the multi-input multi-output (MIMO) PI controller. The controller is
designed using multiobjective optimisation methods and also evaluated on three linearised
gasifier models.
The cost function has the form
The parameter vector K denotes the parameters of the PI controller, is the jth poles of the
closed-loop system, Re(.)denotes the real part of a number, the positive real number
represents the requirements on the closed-loop poles.
Advantage :-
These schemes can provide optimal PID parameters so that the desired system specifications
are satisfied even in case where the system dynamics are time variant or the system operating
points change.
[3]. K.G.Arvanitis, G.D.Pasgianos and G. Kalogeropoulos, “Tuning PID Controllers for a
Class of Unstable Dead Time Processes based on Stability Margins Specifications”,
23

PID CONTROLLER TUNING 2011
IEEE Mediterranean conference on control and automation, July 27-29, 2007, Athens-
Greece.
Work done: -
In this paper The control of unstable second order plus dead time (USOPDT) processes
systems using generalized PID type controllers is investigated in this paper. New tuning rules
based on the exact satisfaction of gain and phase margin specifications are proposed. The
tuning rules are given in the form of iterative algorithms, as well as in the form of accurate
analytic approximations, particularly useful for on-line tuning applications. The proposed
tuning rules are applied for the control of a gravity-biased one degree of freedom magnetic
levitation experimental system.
Unstable processes exhibit two gain margins, designated as the increasing
(or upward) and the decreasing gain margin (or gain reduction margin).
Unstable processes exhibit two gain margins, designated as the increasing
(or upward) and the decreasing gain margin (or gain reduction margin).
The present paper is focused on the tuning of PID-type controllers based
on the exact satisfaction of gain and phase margin specifications. Here,
the phase margin, the increasing, as well as the decreasing gain margins,
has simultaneously been taken into account for the design of the PID
controller for USOPDT process processes. Since the transfer function of an
USOPDT system includes a dead-time term, the tuning formulas for the
parameters of a PID type controller that satisfy the gain and phase margin
specifications cannot be directly expressed in an explicit analytic form. For
this reason, in order to calculate the controller parameters, iterative
algorithms are derived in the paper. In addition to the solution of the
controller-tuning problem provided by iterative algorithms, an analytic
expression that approximates the exact solution quite accurately and
which is particularly useful for on-line applications is also provided for the
special case where the derivative time constant of the controller is
selected equal to the stable time constant of the system. In this special
case, the USOPDT system controlled by a PID controller is equivalent to an
UFOPDT system controlled by a PI controller.
Advantages: -
24

PID CONTROLLER TUNING 2011
Unlike in ‘paper 1’ where a proportional-integral (PI) tuning method, based only on the
phase and the increasing gain margin specifications is proposed. This method uses some
approximations of the tan-1 function to simplify the PI controller design, but due to the less
accurate approximations used, it is not applicable for large values of the time delay and for
small gain and phase margin specifications. This paper presents New tuning rules based on
the exact satisfaction of gain and phase margin specifications are proposed.
[4]. M. Ramasamy, S. Sundaramoorthy, “PID controller tuning for desired closed-loop
responses for SISO systems using impulse response”, The journal of computer &
chemical engineering (Elsevier) vol.32 (2008), pp-1773-1788
Work done:-
In this paper, a new method of designing PID controllers using ‘impulse
response’ instead of ‘step response’ of the plant is presented. Treating the
impulse response of the plant as a statistical distribution, the ‘mean’ and
the ‘variance’ of the distribution are calculated and used in the calculation
of PID controller parameters. Thus, the proposed method requires no
approximation of the plant by any model. In this paper, a direct synthesis
approach to PID controller design is proposed that makes use of Maclaurin
series of the desired closed-loop transfer function, truncated up to the first
three terms. PID controller parameters are synthesized to match the
closed-loop response of the plant to the desired closed-loop response.
Formulae for the calculation of PID controller tuning parameters are
derived for the desired closed-loop response models of the types FOPDT
and SOPDT. Only stable SISO systems are considered. The PID controllers
tuned result in closed-loop responses very close to the desired response
and perform equally well compared to other tuning methods reported in
literature.
Advantages:-
The proposed paper sometimes provides responses with minimum
overshoot and no oscillations with comparable response times.
Systems with complex dynamic characteristics such as dominant numerator dynamics
and inverse response characteristics were also considered.
25

PID CONTROLLER TUNING 2011
PID controllers cascaded with first- or second-order lag are used for dominant
numerator dynamic systems to overcome the problem of negative integral and/or
derivative time constants and it was found that present method performs well.
For inverse response systems, the desired closed-loop response was chosen as the one
with inverse response characteristics and the proposed method results in controller
settings that provide a better closed-loop performance.
[5]. Wuhua Hu, Gaoxi Xiao, Xiumin Li, “An analytical method for PID controller
tuning with specified gain and phase margins for integral plus time delay processes”,
Journal on ISA transactions (Elsevier), vol-50, 2011, pp- 268-276
Work done: -
In this paper, an analytical method is proposed for proportional–integral/proportional–
derivative/proportional–integral–derivative (PI/PD/PID) controller tuning with specified gain
and phase margins (GPMs) for integral plus time delay (IPTD) processes. Explicit formulas
are also obtained for estimating the GPMs resulting from given PI/PD/PID controllers. The
proposed method indicates a general form of the PID parameters and unifies a large number
of existing rules as PI/PD/PID controller tuning with various GPM specifications. The GPMs
realized by existing PID tuning rules are computed and documented as a reference for control
engineers to tune the PID controllers.
There are more than fifty PI/PD/PID tuning rules IPTD process according to the survey made
by O’dwyer The actual number is even much higher Close observations reveal that many of
these rules are sharing a common form. Such observations motivate exploration of a general
solution for the PI/PD/PID controller tuning on an IPTD process in this paper.
Advantage:-
The results show that a variety of GPMs are attained by the existing rules. Since the rules
were developed based on various criteria and methods, the summary of their resulting GPMs
provides a rich reference for control engineers to tune PID controllers, helping to select a rule
or GPM for a specific design.
3.2 METHODS OF OPTIMIZATION: -
[6]. NICK J. KILLINGSWORTH and MIROSLAV KRSTIC, “PID Tuning Using
Extremum Seeking”, IEEE CONTROL SYSTEMS MAGAZINE, FEBRUARY 2006,
pp-70- 80
Work done:-
26

PID CONTROLLER TUNING 2011
This article, we present a method for optimizing the step response of a closed-loop system
consisting of a PID controller and an unknown plant with a discrete version of Extremum
seeking (ES). Specifically, ES minimizes a cost function, which quantifies the performance
of the PID controller. ES, which is a non model-based method, iteratively modifies the
arguments of a cost function (in this application, the PID parameters) so that the output of the
cost function reaches a local minimum or local maximum.
COST FUNCTION AND PID CONTROLLERS: -
ES is used to tune the parameters of a PID controller so as to minimize a given cost function.
The cost function, which quantifies the effectiveness of a given PID controller, is evaluated at
the conclusion of a step-response experiment. We use the integrated square error (ISE) cost
function.
_________________________(3.9)
We use a standard PID controller, with the exception that the derivative term acts on the
measured plant output but not on the reference signal. This PID controller avoids large
control effort during a step change in the reference signal. Figure 3.3 shows a block diagram
of the closed-loop system, where G is the unknown plant, the controller is parameterized as
and r, u, and y are the reference signal, control signal, and output signal, respectively.
FIG 3.3 Closed-loop servo system. The output signal y of the unknown plant G is
regulated to the reference signal r by the two degree- of-freedom controller Cr and Cy.
_____________________________(3.10)
27

PID CONTROLLER TUNING 2011
___________________________(3.11)
Fig3.3- The
Advantages :-
Extremum seeking converges to parameters that yield performance comparable to the
best achievable with other popular PID tuning methods.
Extremum seeking produces favourable results in the presence of actuator saturation.
[7]. Qingdong Zeng & Guanzheng Tan, “Optimal Design of PID Controller Using
Modified Ant Colony System Algorithm”, Third International Conference on Natural
Computation, 2007
Work done: -
In this paper A novel intelligent design method for PID controller with optimal self-tuning
parameters is proposed based on the modified Ant Colony System (ACS) algorithm. By
testing four different control systems with the typical characteristic such as high order, time
delays, and nonlinearity, the proposed ACS-PID algorithm has been demonstrated to have an
adaptive property and robust stability in searching for the optimal PID controller parameters.
By comparing with the PID controllers designed by use of the differential evolution (DE), the
real-coded genetic algorithm (GA), and the simulated annealing (SA), the proposed ACS-PID
controller has been demonstrated to be better than or equivalent to these PID controllers in
control performance.
To emphasize the effectiveness of the proposed method, the ITAE performance criterion is
adopted in this paper. Its formula is: -
28

PID CONTROLLER TUNING 2011
______________________(3.12)
Advantages: -
ACS-PID algorithm has been demonstrated to have the adaptive property and robust stability
in searching for the optimal PID controller parameters.
[8]. Zhang Yachen, Hu Yueming, “On PID Controllers Based on Simulated Annealing
Algorithm”, Proceedings of the 27th Chinese Control Conference July 16–18, 2008,
Kunming, Yunnan, China
Work done: -
This paper applies the simulated annealing algorithm for PID controllers to deal with those
motion control systems having constant disturbance. The main goal is to eliminate the steady
state error of the system and minimize the integral time absolute error (ITAE) performance
index. Three PID controllers, the ordinary PID controller, the increment PID (IPID)
controller and the integral separation PID (ISPID) controller are compared.
The integral time absolute error (ITAE) as the objective function, which emphasizes on the
adjusting time as well as the overshoot. The performance index ITAE is quantified as
follows: -
________________(3.13)
Advantages: -
This algorithm successfully tuned the parameters for the three PID controllers. eliminating
the steady state error of the system and minimizing the ITAE performance index.
[9]. Mohammad Dashti, Kambiz Shojaee, S.M.H. Seyedkashi, Mojtaba Behnam,
“Tuning of Digital PID Controller Using Particle Swarm Optimization”, Proceedings of
the 29th Chinese Control Conference July 29-31, 2010, Beijing, China
Work done : -
In this paper, an accessible method with high accuracy and speed has been presented for
determination of these control parameters, using PSO optimization algorithm and
performance assessment criteria. The results show that there is a considerable difference
between this method’s results and the other method’s. PID controllers are one of the most
29

PID CONTROLLER TUNING 2011
applicable controllers in different industries. The main important need in application of these
controllers is their parameters tuning in order to gain desired result. Existing tuning rules for
their design are usually based on trial and error which are so time consuming, not accurate
and have considerable error.
Fig- Schematic diagram of PID controller optimization process
Advantages: -Particle swarm optimization algorithm shows that this algorithm has a high capability in
tuning of the parameters of this controller and is more efficient compared with the results by
other studies. Authors suggest changing in particle swarm optimization algorithm and more
accurate adaptation of swarm intelligence for further studies. For instance, some points such
as group motion based on the leader orientation or more precise definition of Kinematics
equations with concepts such as particle accelerated motion can be noted.
3.3 Fuzzy PID:-
[10]. K.Goser, KSchuhmacher M.Hartun, K.Heesche, B.Hesse, and A.Kanstein,
“NEURO-FUZZY SYSTEMS FOR ENGINEERING APPLICATIONS”, IEEE
conference on Fuzzy systems, New Orleans, LA, USA, 1996.
Work done:-
This paper reports three advanced developments in neuro fuzzy systems for engineering
applications. The essential part of neuro-fuzzy synergism’s comes from a common
framework called adaptive networks, which unifies both neural networks and fuzzy systems.
A neural network with the interpretation done by a fuzzy system is suitable for quality
monitoring of mechanical equipment or power electronics. Neural networks like self-
organizing maps or radial basis function nets can feed the data for fuzzy systems which can
control battery chargers or drilling machines. An integrated neuro-fuzzy topology is
30

PID CONTROLLER TUNING 2011
described which represents both a complete feed forward network and a fuzzy controller.
This data driven system is very suitable for automotive control. Neuro-fuzzy systems are an
important area for technology transfer.
This paper reviews some developments in adaptive fuzzy systems that employ neural
networks learning techniques. The integration of Fuzzy and neural techniques is an active
area of research; it brings together the best features of fuzzy logic and neural networks,
providing knowledge-based system that can adapt or be organized according to sampled data.
Advantages: -
The feature of neural networks enables the system to learn by itself: it can create new
rules and define new membership functions.
Genetic algorithms offer a way to make the system more efficient by reducing the
number of rules and by adjusting the shape of their membership functions.
[11]. Hyung-Soo Hwang, Jeong-Nae Choi, Won-Hyok Lee, Jin-Kwon Kim, “A Tuning
Algorithm for The PID Controller Utilizing Fuzzy Theory”, IEEE conference on
Control & automation, Chonbuck, Korea,1999.
Work done: -
In this paper we proposed a new PID tuning algorithm by the fuzzy set theory to improve the
perfrmance of the PID Controller. The new tuning algorithm for the PID controller has the
initial value of parameter Kp, , by the Ziegler- Nichols formula that uses the ultimate
gain and ultimate period from a relay tuning experiment. We will get the error and the error
rate of plant output corresponding to the initial value of parameter and find the new
proportion gain(Kp)and the integral time ( )from tuner by the error and error rate of plant
output as a membership function of fuzzy theory.
This paper, proposes a new PID tuning algorithm by the fuzzy set theory to improve the
performance of the PID controller. We determined the ultimate gain and the ultimate period
from a simple relay feedback experiment. The new tuning algorithm for the PID controller
has the initial value of parameter Kp , , by the Ziegler-Nichols formula that used the
ultimate gain and ultimate period from a relay tuning experiment. And compute the error and
the error change rate of plant response corresponding to the initial value of parameter. We
31

PID CONTROLLER TUNING 2011
can find the new proportional gain(Kp) and the integral time ( ) from fuzzy tuner by the
error and the error change rate of plant output.
Advantages: -
This fuzzy tuning algorithm for a PID controller considerably reduced the overshoot
and rise time as compared to any other PID controller tuning algorithms, such as
Ziegler-Nichols tuning method, refinement of the Ziegler-Nichols tuning method and
auto tuning methods etc.
This controller has achievable performance for real parametric uncertainty system.
[12]. Yu Chen and Sangchul Won, “Simple Fuzzy PID Controller Tuning of Integrating
ProcessWith Dead-time”, International Conference on Control, Automation and
Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea
Work done :-
In this paper, a simple fuzzy proportional-integral derivative (PID) controller tuning method
is proposed for a generalized second-order integrating process with dead-time, which is based
on matching the coefficients of corresponding powers of s in the numerator and that in the
denominator of a closed-loop system. A simple tuning parameter for PID controller is
obtained. A new exponential term approximation is introduced which can reduce the model
error. The proof shows that the system performance can be guaranteed. The fuzzy rule base is
built and fuzzy tuning of the obtained tuning parameter is applied. The result of the fuzzy
tuning method is compared with that proposed in literature under both time varying and non-
varying condition. The proposed simple fuzzy tuning method shows a better time domain
performance and good robustness under time varying condition.
In this paper, a better approximation of time delay term is proposed which can work at both
low and high frequency, and a simple fuzzy PID controller tuning method of the generalized
second-order integrating process with dead-time is proposed.
Advantages: -
The proposed simple fuzzy tuning method shows a better time
domain performance and good robustness under time varying
condition.
The proposed method showed a better performance even when the delay time is large
and varying.
32

PID CONTROLLER TUNING 2011
Proposed work
Problem statement : -
1. For a CSTR whose model and data is as shown below: -
F Feed flow rate 0.1m3/min
V Reactor volume 2m3
Ko Reaction rate coefficient
3.5 x 10 /min
Ea Activation energy 49.884kJ/mol
R Ideal gas
Constant
8.313 x 10 -3kJ/mol
Hr Heat of reaction 500kJ/mol
CAO Concentration of A in 1000mol/m3
33

PID CONTROLLER TUNING 2011
feed
To Feed temperature 300C
Ρ Density of solution 1000kg/m3
Cp Heat capacity of solution
4.2kJ/kgoC
UA Heat transfer coefficient (surface)
252kJ/min0C
Vj Jacket volume 0.4m3
Tjf Inlet temperature
of coolant
10°C
MODEL FOR CSTR: -
Where,
Fig- schematic for a cooled CSTR
34

PID CONTROLLER TUNING 2011
The control objective is to maintain the temperature of reactor at a given set point. And
design a FLC(Fuzzy PID) for change set point and for the change in input feed.(disturbance
rejection)
2 To Develop a PID tuning software (in MATLAB environment) incorporating the features
of system identification and latest PID tuning techniques.
3 To develop a technique for building a fuzzy system which from the Knowledge of input –
Output data of any system can develop fuzzy membership functions and rules which
helps further in the design of FLC.
REFRENCES
[1]. E. K. Ho and W. Xu, “PID tuning for unstable processes based on gain and phase margin
specifications,” IEEE Proc. Inst. Elect. Eng. D, vol. 145, no. 5, pp. 392–396, May 1998.
[2] G.P. Liu and S. Daley, “Optimal-tuning PID control for industrial systems”, journal of
control engineering practices (Elsevier), vol.9, pp-1185-1194, 2001.
[3]. K.G.Arvanitis, G.D.Pasgianos and G. Kalogeropoulos, “Tuning PID Controllers for a Class
of Unstable Dead Time Processes based on Stability Margins Specifications”, IEEE
Mediterranean conference on control and automation, July 27-29, 2007, Athens- Greece.
[4]. M. Ramasamy, S. Sundaramoorthy, “PID controller tuning for desired closed-loop
responses for SISO systems using impulse response”, The journal of computer & chemical
engineering (Elsevier) vol.32 (2008), pp-1773-1788
35

PID CONTROLLER TUNING 2011
[5]. Wuhua Hu, Gaoxi Xiao, Xiumin Li, “An analytical method for PID controller tuning
with specified gain and phase margins for integral plus time delay processes”, Journal on ISA
transactions (Elsevier), vol-50, 2011, pp- 268-276
[6]. NICK J. KILLINGSWORTH and MIROSLAV KRSTIC, “PID Tuning Using Extremum
Seeking”, IEEE CONTROL SYSTEMS MAGAZINE, FEBRUARY 2006, pp-70- 80.
[7]. Qingdong Zeng & Guanzheng Tan, “Optimal Design of PID Controller Using Modified
Ant Colony System Algorithm”, Third International Conference on Natural Computation,
2007
[8]. Zhang Yachen, Hu Yueming, “On PID Controllers Based on Simulated Annealing
Algorithm”, Proceedings of the 27th Chinese Control Conference July 16–18, 2008,
Kunming, Yunnan, China
[9]. Mohammad Dashti, Kambiz Shojaee, S.M.H. Seyedkashi, Mojtaba Behnam, “Tuning of
Digital PID Controller Using Particle Swarm Optimization”, Proceedings of the 29th Chinese
Control Conference July 29-31, 2010, Beijing, China
[10]. K.Goser, KSchuhmacher M.Hartun, K.Heesche, B.Hesse, and A.Kanstein, “NEURO-
FUZZY SYSTEMS FOR ENGINEERING APPLICATIONS”, IEEE conference on Fuzzy
systems, New Orleans, LA, USA, 1996
[11]. Hyung-Soo Hwang, Jeong-Nae Choi, Won-Hyok Lee, Jin-Kwon Kim, “A Tuning
Algorithm for The PID Controller Utilizing Fuzzy Theory”, IEEE conference on Control &
automation, Chonbuck, Korea,1999.
[12]. Yu Chen and Sangchul Won, “Simple Fuzzy PID Controller Tuning of Integrating
ProcessWith Dead-time”, International Conference on Control, Automation and Systems
2008 Oct. 14-17, 2008 in COEX, Seoul, Korea.
36

PID CONTROLLER TUNING 2011
[13]. ASTROM, K.J., and HAGGLUND, T.: ‘PID controllers: theory, design, and tuning’,
Instrum. Soc. Am., 1995
[14]. O’Dwyer A. Handbook of PI and PID controller tuning rules. 2nd ed. London: Imperial
College Press; 2006.
37